Embed Size (px)
Citation preview
Real-time crowd motion planning: Scalable Avoidance and Group Behavior
(2008)Authors: Yersin, Maïm, Morini, Thalman
Presented by: Jessica Siewert
Content of presentation
• The Method:– Previous work– The architecture– Implementation– Experiments– Developments since
• Assessment

Introduction – Previous work
• Agent-based (low performance)
• Behavioral model (no high level control)
• Navigation graph (no inter-pedestrian collision avoid.)
• Various other approaches (no indiv. characteristics)
• Hybrid approaches

Introduction – Now we get…
• Improved hybrid architecture• Realistic motion paths (planning)• Realistic short term avoidance• Small group behaviors

Introduction – Our method…
• Hybrid: – potential field– Navigation graph– New agent-based short term collision avoidance
• Three regions of interest – architecture• Smooth transition between ROI’s
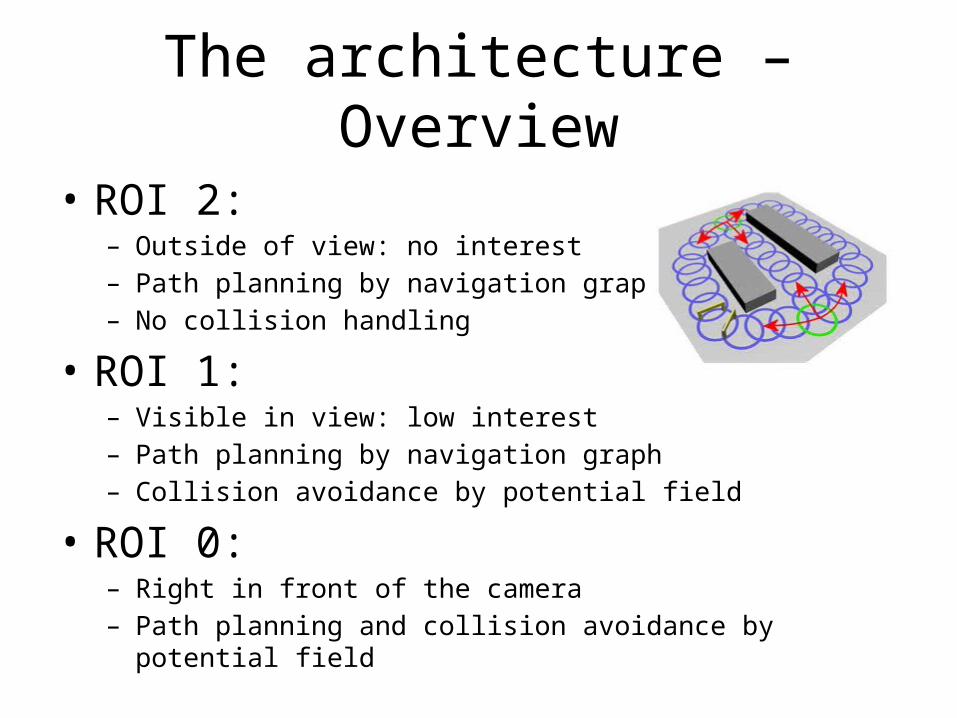
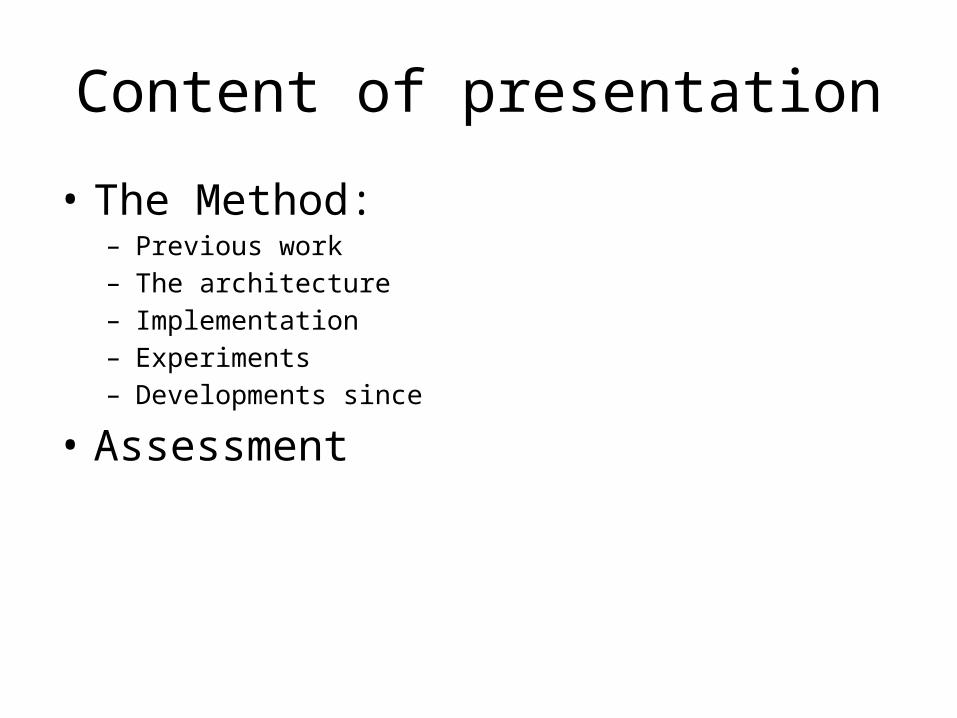
The architecture – Overview
• ROI 2:– Outside of view: no interest– Path planning by navigation graph– No collision handling
• ROI 1:– Visible in view: low interest– Path planning by navigation graph– Collision avoidance by potential field
• ROI 0:– Right in front of the camera– Path planning and collision avoidance by potential field

Implementation
• Initialization• Classification• Potential field computation• Improved short-term avoidance algorithm• Steering• Continuity maintanance

Initialization & classification
• Active vertices• Grid composing• Elimination of cells• Linkage to neighbors• ROI 0, 1 and 2 lists

Potential field computation
• Goals• Subgoals• Sets/groups• Waypoints• Only in ROI 0/just outside ROI 0

Short-term avoidance
• Maximize speed, then minimize detours• “Potential field failure”• Identification of cells• Security check• Emergency avoidance

Steering & continuity
• Reynolds’ seek behavior (ROI 0 and 1)• Linear steering in ROI 2• We use potential field for all coll. Av.• Always update graph of ROI 1, even in ROI 0• Test graph path when exiting ROI 0

Group behavior
• 2-5 characters• Speed adaptation• Waypoint modification

Experiments

Experiments – Claim recall
• Improved hybrid architecture• Realistic motion paths (planning)• Realistic short term avoidance• Small group behaviors• Smooth transition between ROI’s

Movies…
• http://www.youtube.com/watch?v=QpwbhNE6Fe8• http://www.youtube.com/watch?v=ifimWFs5-hc

Developments since then
• http://portal.acm.org/citation.cfm?id=1410252

Assessment
• Circle approach• Ermergency avoidance changes everything• Skipping grid cells• Size of the cells• Fast pedestrians?

Assessment
• Decomposition methods/robustness?• Crowd behavior – more decoupled sets• Threshold experimentation• Speeding up/slowing down relations• De-linkage out of view

Assessment
• Frame rate• Runtime• Sets/groups definitions• User opinions• Not that many characters as they promised