Embed Size (px)
DESCRIPTION
Prostředky automatického řízení. Vymezení. Pro řízení (ev. automatizaci) je potřeba znát: a) CO řídit => nutno stanovit matematické modely (popisy) řízené soustavy: - z fyzikální podstaty - identifikací (měřením) - PowerPoint PPT Presentation
Citation preview

Prostředky automatického řízení
Vymezení
• Pro řízení (ev. automatizaci) je potřeba znát: • a) CO řídit => nutno stanovit matematické
modely (popisy) řízené soustavy: • - z fyzikální podstaty
• - identifikací (měřením)
• b) JAK řídit => stanovit skladbu (strukturu) a parametry řídicího (regulačního) systému
• c) ČÍM řídit => zvolit prostředky řízení
Historie
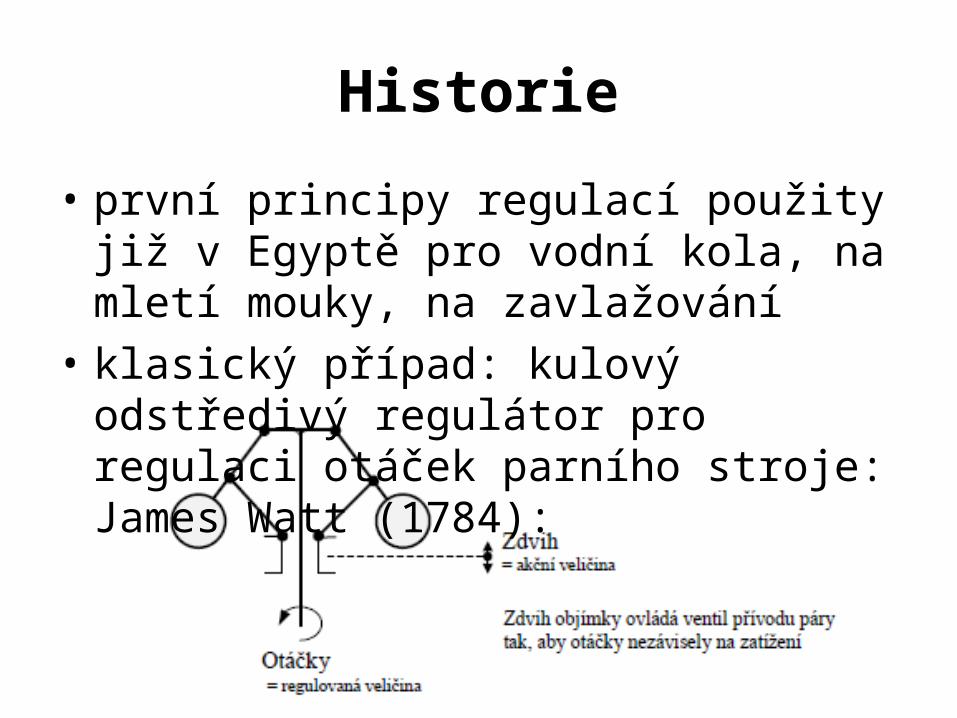
• první principy regulací použity již v Egyptě pro vodní kola, na mletí mouky, na zavlažování
• klasický případ: kulový odstředivý regulátor pro regulaci otáček parního stroje: James Watt (1784):
Vývojové trendy a) dříve direktní regulátory => nepotřebovaly přívod
energie dnes indirektní => nutný zdroj energie, lepší kvalita reg.
b) dříve kompaktní systémy (1 stojan se vším) dnes stavebnicové systémy, zásadně oddělené řídící části od silové části
c) dříve mechanické a mechanicko hydraulické systémy dnes elektrohydraulické systémy (el.=řídící, hydr.=silové)
d) dříve řídící elektronická část analogová dnes řídící elektronická část číslicová

Vývoj dle součástkové základny Dominantní vliv má dosažitelná součástková základna: • elektromechanické prvky: relé, stykače,
elektromagnety • elektronky => již zesilovače • tranzistory (objev r. 1947) => nižší spotřeba, objem,
vyšší životnost • integrované obvody (1958), později operační
zesilovače => snadná realizace přenosů PID regulátorů • mikropočítače; základem mikroprocesor (od r. 1971)
=> obecné zpracování informace => i složité algoritmy, programovatelnost <=> univerzálnost, hromadná výroba
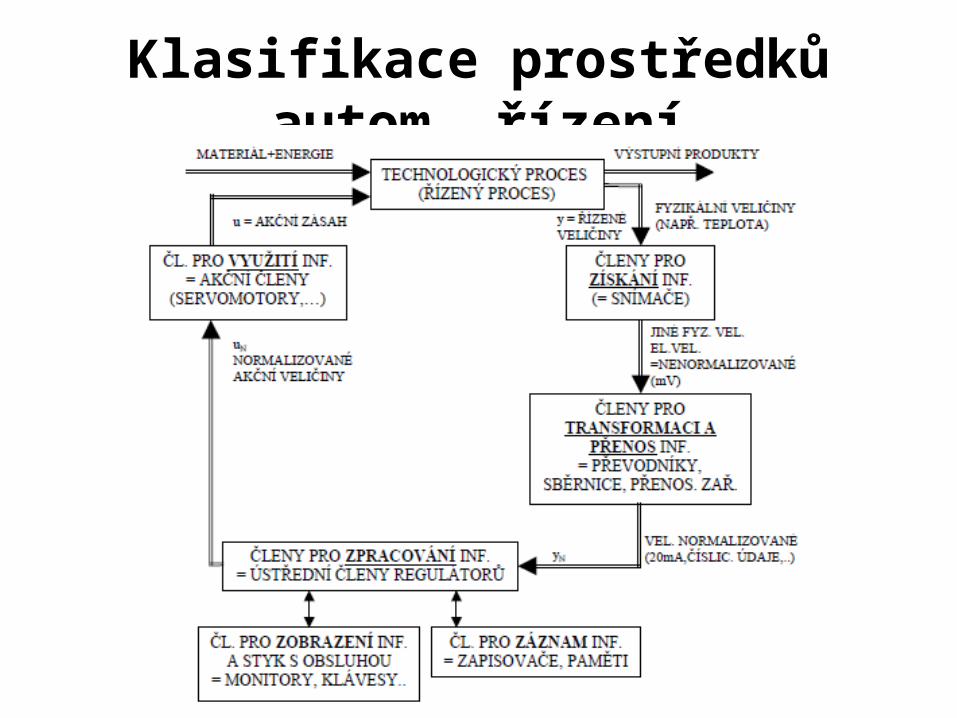
Klasifikace prostředků autom. řízení

Dle konstrukce (využívané energie)
• elektrické a elektronické (převažují) • pneumatické • hydraulické • kombinované (většinou elektrohydraulické a
elektropneumatické)

Dle nosného signálu informace
Analogové• jsou spojité v čase!! • zpracovávaná informace je dána např. velikostí
ss. napětí, ss. proudem, frekvencí, tlakem, … • velikost signálu většinou spojitá (proporcionální):

Dle nosného signálu informaceČíslicové (digitální)• jsou diskrétní, tj. nespojité v čase!!• informace o velikosti je dána číselným
vyjádřením • proto většinou nespojitost i v hodnotě -
diskretizace hodnoty dána použitým číselným rozsahem: - 12 bitové vyjádření => 4096 hodnot
=> dobré vlastnosti - 8 bitové vyjádření => 256 hodnot
• =>menší kvalita řízení - 1 bitové => logické řízení! (2 stavy : zap, vyp.) t

Dle nosného signálu informace
• Impulzní

Regulátor• Regulátor je zařízení pro ovlivňování regulovaného systému,
automatizovanou regulaci, k dosažení a udržení jeho požadovaného stavu.
• Typicky se používá v záporné zpětné vazbě systému. • Regulátor pak reguluje systém s cílem buď úplné eliminace odchylky,
nebo jeho regulační zásahy odchylku alespoň udržují v předepsaných mezích.
• Modelováním systémů a jejich regulátorů se zabývá teorie řízení. • Regulátor bývá na systém připojen přes vstupní a výstupní
převodníky. • Regulace je při čtení systému v čase buď spojitá, nebo diskrétně
vzorkovaná (nespojitá). I zásahy do systému mohou být buď analogové, nebo digitální, stupňovité.

Wattův odstředivý regulátor
• používá ke stabilizaci otáček parního stroje. Byl zaveden v roce 1782 Jamesem Wattem.
Skládá se ze dvou závaží, která rotují a jsou poháněna strojem, jehož otáčky mají být regulovány. Čím rychleji tato závaží rotují, tím větší je vlivem odstředivé síly jejich výchylka od svislé osy rotace. Uvedené vychýlení je nad jejich ukotvením převedeno na svislý pohyb, který je dále pákou a táhlem převeden k ventilu přivádějícímu páru ke stroji. Je tak realizována mechanická záporná zpětná vazba, která dovoluje působením poměrně malých sil regulovat velmi výkonný stroj.

Spojité regulátory• výstupní veličina spojitého regulátoru (akční
veličina) je spojitou funkcí jeho vstupní veličiny (regulační odchylky).
• reg.veličina neustále ovlivňuje akční veličinu, která může nabývat libovolné hodnoty od x = 0 až po x = xmax.
• Regulátory jsou obvykle konstruovány tak, aby bylo možné jejich vlastnosti volit, a tím je co nejlépe přizpůsobit dané regulované soustavě. Tato volba vlastností regulátoru spočívá v tom, že můžeme volit závislost mezi výstupní a vstupní veličinou regulátoru.

Spojité regulátory
• Jednoduché – P regulátor – I regulátor – D regulátor
• Složené – PI regulátor – PD regulátor – PID regulátor

Spojitý regulátor typu P
• Nejjednodušší závislost mezi výstupní a vstupní veličinou regulátoru je přímá úměrnost.
• Regulátor, který v rovnovážném stavu uvedenou závislost splňuje, se nazývá proporcionální regulátor.
Podle výšky hladiny hýbe plovák s pákou, která reguluje přítok vody. Výška hladiny je pří nepřerušeném přítoku stálá.

Blokové schéma regulačního obvodu

Výstupy ústředních členů regulátoru
• spojité (proporcionální, lineární): výstupní veličinou je ss. napětí či proud
• nespojité (nelineární): výstup je spínací prvek (relé,…)– dvoupolohové:
• Impulzní: výstupní veličina je šířkově modulovaná

Regulační obvod diskrétní
• Diskrétní systém: alespoň 1 člen pracuje v diskrétních časových okamžicích





























