Embed Size (px)
DESCRIPTION
DC motor
Citation preview

Aktuatori. Električni istosmjerni motori

Mjerenje razine
Mjerenje protoka
21.10.2010.
2
Predavanje 6 - EAP

Aktuatori Osnovni pojmovi Elektromagnetski aktuatori Istosmjerni motori
Izvedba i princip rada Nezavisno uzbuđeni motor Serijski uzbuđeni motor Složeno uzbuđeni motor Upravljanje brzinom vrtnje Dinamičke karakteristike
21.10.2010.
3
Predavanje 6 - EAP

Osnovni pojmovi
• Aktuatori su uređaji koji električnu ili fluidnu energiju pretvaraju u mehaničku energiju, te kao izlaznu veličinu imaju silu ili moment pomoću kojih ostvaruju linearno ili kružno gibanje.
• Aktuator možemo uvjetno podijeliti na tri osnovna dijela: - pojačalo snage (ili upravljački uređaj), - pogon,- izvršni član.
21.10.2010.
4
Predavanje 6 - EAP

Osnovni pojmovi
21.10.2010.
5
Predavanje 6 - EAP
VentilCrpka
Robotska rukaKotač vozila
..........
Elektron. pojačalaEnerg. pretvaračiHidraulički ventili
..............
ElektromagnetElektromotor
Hidraulički motorPneumatski motor
.............
Izvršni član
Električna ili fluidna
energijaLinearno ili kružno
gibanje
PogonPojačalo snage
Komponente aktuatora
Upravljački signal

Osnovni pojmovi• Aktuatore je moguće podijeliti s obzirom na načine pretvorbe
energije:
21.10.2010.
6
Predavanje 6 - EAP
Elektromagnetski aktuatori
Aktuatori koji koriste fluid
Mikroaktuatori
ElektromagnetiAC motori DC motoriPM motori
Koračni motoriLinearni motori
Hidraulički ventili, cilindri i motori
Pneumatski ventili, cilindri i motori
PiezoelektričniMagnetostriktivni
KemijskiTermički

Elektromagneti AC motori DC motori PM motori Koračni motori Linearni motori
21.10.2010.
7
Predavanje 6 - EAP

• Solenoidi su jednostavni elektromagnetski uređaji koji električnu energiju direktno pretvaraju u linearno mehaničko gibanje. Imaju relativno mali hod, što ograničava njihovu primjenu.
• Solenoid se sastoji od zavojnice i željezne kotve koja se može gibati unutar zavojnice. Kada se kroz zavojnicu pusti istosmjerna ili izmjenična struja, na kotvu djeluje elektromagnetska sila (Fem) koja je uvlači unutar zavojnice. Za povratak kotve u početni položaj koristi se opruga.
21.10.2010.
8
Predavanje 6 - EAP
Fem
Isključeno Uključeno
Kotva
Opruga

• Magnetsko polje u solenoidu možemo izračunati iz:
gdje je (permeabilnost – H/m), B – magnetska indukcija (T), n – broj zavoja po metru, h – dužina solenoida (m)
21.10.2010.
9
Predavanje 6 - EAP
Solenoid Catalog

• Zbog malog hoda primjene su ograničene, ali ipak postoji mnoštvo primjena pri čemu se elektromagneti uglavnom koriste kao “on/off” (uključi/isključi) aktuatori: npr. releji, električne brave, elektromagnetski ventili, sklopnici.....
• Znatno veći napon i struja potrebni su za uvlačenje kotve, nego za držanje kotve u uvučenom položaju kada nepotrebno teče veća struja i zagrijava zavojnicu.
21.10.2010.
10
Predavanje 6 - EAP
Izmjenični elektromagnet
Istosmjerni elektromagnet

• Sila na kotvu je promjenljiva ovisno o njenom položaju, a najveća je pri uvučenom položaju kotve.
• Elektromagneti mogu biti projektirani za kontinuirani ili intermitirani rad. Kod intermitiranog rada poslije svakog ciklusa rada potrebno je odgovarajuće vrijeme hlađenja, dok su elektromagneti za kontinuirani rad projektirani tako da termički mogu stalno podnijeti nazivnu struju.
• Izmjenični elektromagneti koriste lameliranu kotvu i kućište radi sprečavanja vrtložnih struja.
21.10.2010.
11
Predavanje 6 - EAP
Izmjenični elektromagnet
Istosmjerni elektromagnet

21.10.2010.
12
Predavanje 6 - EAP

• Istosmjerni strojevi su prvi električni strojevi.
• Prvi istosmjerni motor konstruirao je Jacobi 1838. godine u Petrogradu, a motor je tjerao čamac s 14 osoba po rijeci Nevi.
• Namoti statora i rotora bili su učvršćeni na drvenoj konstrukciji.
21.10.2010.
13
Predavanje 6 - EAP

• Istosmjerni motor razvijen početkom XX stoljeća imao je sve bitne dijelove kao i današnji stroj.
• U drugoj polovini XX stoljeća istosmjerni motor je prevladavao u pogonima koji su zahtijevali regulaciju brzinu vrtnje, pri čemu je poseban značaj imao razvoj upravljivih poluvodičkih pretvarača.
21.10.2010.
14
Predavanje 6 - EAP

• Jednostavni DC motor ima namot koji može rotirati u magnetskom polju.
• Struja u namotu dolazi preko dvije četkice koje ostvaruju pokretni kontakt s komutatorom.
• Namot se nalazi u magnetskom polju.
Sila koja se javlja zbog protjecanja struje i magnetskog polja uzrok je momentu koji zakreće petlju.
21.10.2010.
15
Predavanje 6 - EAP

Dijelove istosmjernih strojeva moguće je podijeliti na:
Mehaničke dijelove – kućište, osovina, ležajni štitovi, ležaji, ventilatori; Električke dijelove – namot statora i rotora, kolektor, četkice,
priključne stezaljke; Magnetske dijelove – jaram statora, glavni i pomoćni polovi statora,
jaram i zubi rotora, zračni raspor;
21.10.2010.
16
Predavanje 6 - EAP

21.10.2010.
17
Predavanje 6 - EAP
Stator istosmjernog stroja se sastoji od kućišta i od istaknutih (glavnih) polova s uzbudnim namotom.
Na statoru su smještene i četkice koje kližu po kolektoru rotora. Kućište ujedno čini i jaram statorskoga magnetskoga kruga. Na statoru su prisutni i neki konstrukcijski dijelovi poput nosača ležaja, te nosača držača četkica.
Istosmjerni strojevi manjih i srednjih snaga posjeduju i pomoćne polove s pomoćnim namotom.
Kod najvećih strojeva postoji i kompenzacijski namot u utorima glavnih polova. Uzbudni namoti (nezavisna, serijska, poredna) svojim protjecanjem djeluju u uzdužnoj osi stroja.
Namot pomoćnih polova i kompenzacijski namot svojim protjecanjem djeluje u poprečnoj osi stroja.

21.10.2010.
18
Predavanje 6 - EAP
Rotor se sastoji od rotorskog paketa, namota armature, kolektora i osovine.
Armaturni namot je smješten u utorima na obodu rotora, i spojen na kolektor koji se sastoji od međusobno izoliranih lamela.
Armaturni namot svojim protjecanjem djeluje u poprečnoj osi stroja.

• Kućište statora je izrađeno od lijevanog čelika.
• Na unutarnjoj strani kućišta nalazi se jaram na koji su ugrađeni glavni i pomoćni polovi sa svojim namotima. Jaram s polovima predstavlja stator.
• Na osovini rotora nalazi se rotorski paket sastavljen od dinamo-limova, a u utorima tog paketa ugrađen je armaturni namot koji je priključen na lamele kolektora.
21.10.2010.
19
Predavanje 6 - EAP
POPREČNI PRESJEK: 1) Kućište; 2) Glavni pol; 3) Namot glavnog pola; 4) Pomoćni pol; 5) Namot pomoćnog pola; 6) Rotorski paket; 7) Armaturni namot; 8) Osovina
6
8
7

• Princip rada istosmjernog motora objasnit ćemo na pojednostavljenom shematskom prikazu dvopolnog motora s jednim zavojem na rotoru.
• Kada na četkice rotora narinemo istosmjerni napon, preko kolektora proteče struja kroz dva vodiča zavoja.
• Budući da se vodiči nalaze u magnetskom polju stvorenom od strane elektromagneta na istaknutim polovima, na svaki vodič djeluje sila: F= B I l , gdje je B – magnetska indukcija, I - struja i l - duljina vodiča.
21.10.2010.
20
Predavanje 6 - EAP

• Moment na oba vodiča je: M = B·I·l·D
• Stvarni istosmjerni motor ima na rotoru namot s p pari polova, z vodiča i a pari paralelnih grana, te razvija moment:
gdje je Ia ukupna struja armature, a Φgl magnetski tok pod jednim polom:
Φ = Bsr·τp·l
gdje je polni korak: τp = Dπ/2p, a Bsr – srednja vrijednost indukcije pod polom.
21.10.2010.
21
Predavanje 6 - EAP
Mp z
aI k Ia m a
2

1) Dovođenje napajanja na zavoj rotora -> magnetsko polje oko armature. Lijeva strana armature je odgurnuta od lijevog magneta -> rotacija
2) Nastavak rotacije• 3) Komutator mijenja smjer struje i vrtnja se
nastavlja
4) Unutrašnjost DC motora
21.10.2010.
22
Predavanje 6 - EAP
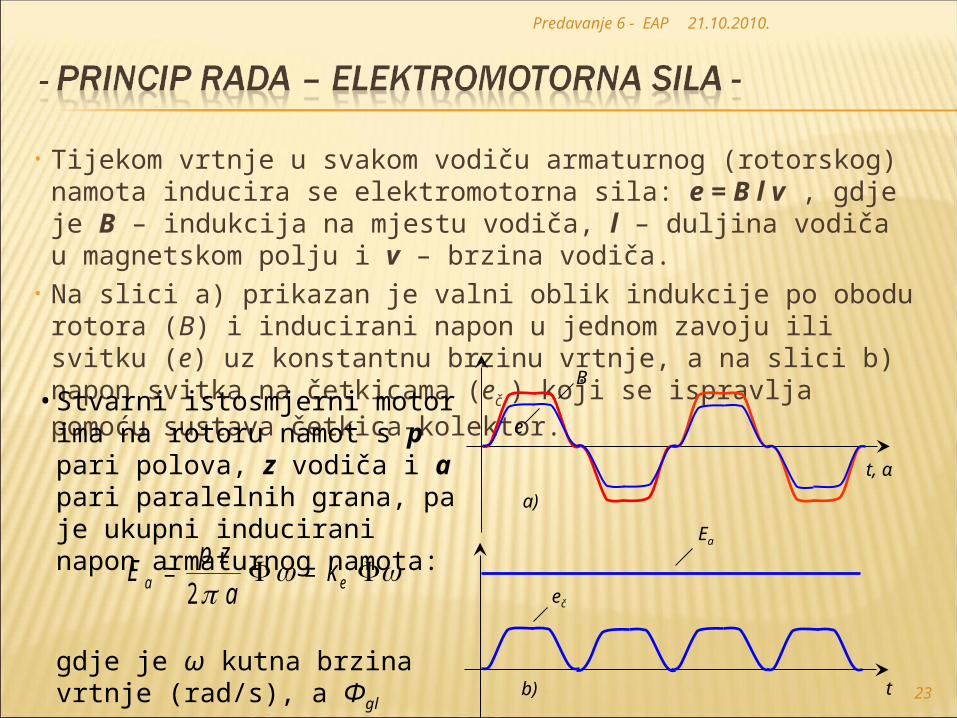
• Tijekom vrtnje u svakom vodiču armaturnog (rotorskog) namota inducira se elektromotorna sila: e = B l v , gdje je B – indukcija na mjestu vodiča, l – duljina vodiča u magnetskom polju i v – brzina vodiča.
• Na slici a) prikazan je valni oblik indukcije po obodu rotora (B) i inducirani napon u jednom zavoju ili svitku (e) uz konstantnu brzinu vrtnje, a na slici b) napon svitka na četkicama (eč ) koji se ispravlja pomoću sustava četkica-kolektor.
21.10.2010.
23
Predavanje 6 - EAP
t, α
B
e
a)
t
eč
b)
Ea
•Stvarni istosmjerni motor ima na rotoru namot s p pari polova, z vodiča i a pari paralelnih grana, pa je ukupni inducirani napon armaturnog namota:
gdje je ω kutna brzina vrtnje (rad/s), a Φgl magnetski tok pod jednim polom.
Ep z
aka e
2

• Nadomjesna shema armaturnog (rotorskog) kruga za stacionarna stanja prikazana je na slici.
• Narinutom armaturnom naponu (Ua) ravnotežu drži elektromotorna sila (Ea).
• Naponska jednadžba armaturnog kruga za stacionarna stanja je:
21.10.2010.
24
Predavanje 6 - EAP
U I R Ea a a a
E ka e
Ra Ia
=
+
Ua
iu
Φ

• Na četkicama motora javlja se pad napona koji je ovisan o struji, ali nije linearan.
• Taj se pad napona može uzeti u obzir povećanjem otpora armature (Ra) ili se u naponskoj jednadžbi dodaje pad napona na četkicama (ΔUč ) za kojeg se obično uzima konstantna vrijednost od 2 V.
• U tom je slučaju naponska jednadžba:
21.10.2010.
25
Predavanje 6 - EAP
E ka e
Ra Ia
=
+
Ua
iu
Φ
Ua = Ia R a + Ea + ΔUč

21.10.2010.
26
Predavanje 6 - EAP

Osim glavnog uzbudnog namota na statoru i armaturnog namota na rotoru, istosmjerni motori često imaju i slijedeće namote:
• Pomoćni polovi ugrađuju se između glavnih polova ( u tzv. neutralnu zonu), a osnovni zadatak im je rješavanje problema komutacije. Namot pomoćnih polova ima mali broj zavoja, a kroz njega teče struja armature.
• Kompenzacijski namot ugrađuje se u polne papuče glavnih polova, kroz njega teče struja armature, a osnovni zadatak mu je kompenzacija reakcije armature.
• Kompaudni namot ugrađuje se na glavne polove, ima mali broj zavoja, kroz njega teče struja armature koja stvara magnetsko polje istog smjera kao i glavni uzbudni namot. Zadatak mu je kompenzacija gubitka induciranog napona uslijed reakcije armature. Pravilnim dimenzionoranjem ovog namota mogu se postići različite vanjske karakteristike kompaudnih motora.
21.10.2010.
27
Predavanje 6 - EAP

• Nezavisno uzbuđeni motor ima nezavisni uzbudni namot na koji se dovodi istosmjerni napon iz posebnog izvora.
• Kroz uzbudni namot proteče struja koja stvara glavni tok motora Φgl koji u okolišu nazivne radne točke nije linearno ovisan o struji uzbude zbog zasićenja.
21.10.2010.
28
Predavanje 6 - EAP
Oznake stezaljki:A1-A2 – armaturni namotF1-F2 – uzbudni namotB1-B2 – namot pomoćnih polova
A1 A2
+-
+-
Ia iu
B1 B2
F1
F2

• Uzimajući u obzir tri osnovne jednadžbe za: elektromagnetski moment, inducirani napon i naponsku jednadžbu armaturnog kruga, dobije se vanjska karakteristika istosmjernog motora s nezavisnom uzbudom je:
• Povećanjem momenta tereta brzina motora opada približno linearno.
21.10.2010.
29
Predavanje 6 - EAP
Oznake stezaljki:A1-A2 – armaturni namotF1-F2 – uzbudni namotB1-B2 – namot pomoćnih polova
A1 A2
+-
+-
Ia iu
B1 B2
F1
F2
U
k
R
k kM k Ma
e
a
e m 2 0
ω
ω0
M

• Uzbudni i armaturni namot serijskog motora spojeni su u seriju, pa je struja armature ujedno i struja uzbude (Ia = iu = I).
• Budući da je magnetski tok proporcionalan struji armature, moment serijskog motora može se izraziti kao:
21.10.2010.
30
Predavanje 6 - EAP
M k I ' 2
A1 A2
+-
Ia iu
B1 B2
D1
D2Ia = iu
Oznake stezaljki:A1-A2 – armaturni namotD1-D2 – serijski uzb. namotB1-B2 – namot pomoćnih polova

• Uzimajući u obzir vezu između brzine i
induciranog napona , dobiva
se približni izraz za brzinu vrtnje nezasićenog serijskog motora:
• Zbog vanjske karakteristike konstantne snage (P=M·ω), serijski se motor najviše koristi u vuči (lokomotiva, tramvaj).
• Motor ne može raditi neopterećen jer ω → ∞.
21.10.2010.
31
Predavanje 6 - EAP
A1 A2
+-
Ia iu
B1 B2
D1
D2Ia = iu
Oznake stezaljki:A1-A2 – armaturni namotD1-D2 – serijski uzb. namotB1-B2 – namot pomoćnih polova
E
ka
e g l
kU
Msa
ω
M

• Kompaudirani motor ima nezavisnu (ili paralelnu) i serijsku uzbudu.
• Djelovanje serijske uzbude (ius) gotovo uvijek potpomaže nezavisnu uzbudu (iun) .
• Ovisno o udjelu pojedinih uzbuda kompaudirani motor ima tvrđu ili mekšu vanjsku karakteristiku.
• Ako prevladava nezavisna uzbuda motor ima tvrđu karakteristiku, a ako prevladava serijska uzbuda motor ima mekšu karakteristiku (brzina se više smanjuje s porastom momenta).
• Za razliku od serijskog motora kompaudirani motor može raditi neopterećen, jer je brzina praznog hoda određena nezavisnom uzbudom.
21.10.2010.
32
Predavanje 6 - EAP
A1 A2
+-
Ia iun
B1 B2
E1
E2
D1
D2
ius
ω
ω0
M

• Brzina vrtnje nezavisno uzbuđenog motora određena je izrazom:
• Budući su konstante ke i km određene konstrukcijom motora, iz izraza se zaključuje da se brzinom vrtnje može upravljati na dva načina:
- promjenom napona armature (Ua)
- promjenom struje uzbude, tj. magnetskog toka (Ф).
• Ukoliko se u armaturni krug postavi vanjski otpor, taj otpor, sa stanovišta vanjskih karakteristika - ω=f(M), ima isti utjecaj kao i otpor armature (Ra).
• To znači da se i dodavanjem otpora u armaturni krug može upravljati brzinom vrtnje. Iako se takav način koristio u starim elektromotornim pogonima, u novim pogonima se ne koristi zbog nepraktičnosti upravljanja otporom i velikih gubitaka na dodanom otporu.
21.10.2010.
33
Predavanje 6 - EAP
U
k
R
k kMa
e
a
e m 2

• Promjenom napona armature upravlja se brzinom vrtnje istosmjernih motora do njihove nazivne brzine.
• Napon armature mijenja se pomoću tiristorskih pretvarača ili tranzistorskih čopera, pomoću kojih je brzinu moguće i reverzirati.
• Na slici je prikazana principna shema upravljanja s jednofaznim tiristorskim pretvaračem, valni oblici izmjeničnog i reguliranog istosmjernog napona, te momentne karakteristike za različite napone armature.
21.10.2010.
34
Predavanje 6 - EAP
iun
Ua
+
U~
ω
M
Uan
Uan
2
Uan
2-
- Uan

• Uz konstantan napon armature (Ua), promjenom struje uzbude mijenja se magnetski tok (Φ) i upravlja brzinom vrtnje iznad njene nazivne vrijednosti.
• Zbog problema zasićenja željeza promjena toka može se ostvariti samo tako da se on smanjuje (Φ < Φn).
• Smanjivanjem toka povećava se brzina praznog hoda, a karakteristike postaju sve strmije.
21.10.2010.
35
Predavanje 6 - EAP
U
k
R
k kMa
e
a
e m 2
ω
ω0n
M
Φn
0.5Φn
0.75Φn
2ω0n
Mn
Ia < Ian

• Ako bi se pri smanjenom toku zadržao konstantan moment (M=km Φ Ia) povećala bi se armaturna struja a time i gubici, odnosno zagrijavanje motora.
• Da se to izbjegne mora se smanjiti moment opterećenja tako da struja armature ne premaši nazivnu vrijednost, Ia < Ian.
• Na slici je ucrtano ograničenje po momentu uslijed ograničenja struje armature.
21.10.2010.
36
Predavanje 6 - EAP
ω
ω0n
M
Φn
0.5Φn
0.75Φn
2ω0n
Mn
Ia < Ian

• Razmotrit ćemo dinamičke karakteristike i izvesti prijenosnu funkciju istosmjernog motora s nezavisnom (konstantnom) uzbudom i promjenljivim naponom armature.
• Nadomjesna shema armaturnog kruga prikazana je na slici:
21.10.2010.
37
Predavanje 6 - EAP
e ka e
Ra
ia
+
ua
iu
Φ
La
mt
ω
me

• Uz konstantnu uzbudnu struju, tj. magnetski tok Φ, naponska jednadžba armaturnog kruga je:
gdje je inducirani napon:
21.10.2010.
38
Predavanje 6 - EAP
e ka e
Ra
ia
+
ua
iu
Φ
La
mt
ω
me
u i R Ld i
d tea a a a
aa ,
e ka e

• Za matematički opis dinamičkog ponašanja istosmjernog motora potrebno je napisati i jednadžbu gibanja, koja uz zanemareno trenje glasi:
gdje su:
J – moment inercije, mt – moment tereta i me - elektromagnetski moment motora koji je jednak:
21.10.2010.
39
Predavanje 6 - EAP
Jd
d tm me t
m k ie m a

• Uz konstantan magnetski tok izrazi za inducirani napon i elektromagnetski moment se pojednostavljuju:
gdje konstante Ke i Km u sebi uključuju i magnetski tok Φ.
• Matematički model istosmjernog motora s konstantnom nezavisnom uzbudom opisan je s naponskom jednadžbom i jednadžbom gibanja, koje poprimaju slijedeći oblik:
21.10.2010.
40
Predavanje 6 - EAP
e Ka e m K ie m a
d i
d t Lu i R Ka
aa a a e
1( )
d
d t JK i mm a t
1( )

• Dvije diferencijalne jednadžbe Laplaceovom transformacijom prevode se u algebarske jednadžbe koje poprimaju slijedeći oblik:
gdje su: Ka=1/Ra ; Ta=La/Ra..
• Na temelju jednadžbi u Laplaceovu području može se sastaviti blok dijagram koji definira prijenosnu funkciju istosmjernog motora s konstantnom uzbudom:
21.10.2010.
41
Predavanje 6 - EAP
I sK
sTU s K sa
a
aa e( ) ( ) ( )
1 ( ) ( )s
J sK I s Mm a t
1
K
T sa
a1 K m
1
J s
K e
I a
E a
U aM e
M t
+
-
+ -

• Na temelju blokovskog dijagrama mogu se izvesti dvije prijenosne funkcije: 1) Prijenosna funkcija odziva brzine vrtnje na step armaturnog napona:
2) Prijenosna funkcija odziva brzine vrtnje na step momenta tereta:
gdje su: – električna vremenska konstanta armaturnog namota
– elektromehanička vremenska konstanta
21.10.2010.
42
Predavanje 6 - EAP
( )
( )
s
U s K sT s T Ta e m a m
1 1
1 2
( )
( )
s
M s
T
J
sT
sT s T Tt
m a
m a m
1
1 2
TL
Raa
a
TJ
K K Kma e m

• Odziv brzine vrtnje istosmjernog motora ovisi o njegovim vremenskim konstantama.
• Ako je Tm > 4Ta odziv je aperiodski (bez prebačaja).
• Ako je Tm < 4Ta odziv je oscilatorni (s prebačajem).
21.10.2010.
43
Predavanje 6 - EAP
t
t
Δω
Δua
t
t
Δω
Δua
Tm > 4Ta Tm < 4Ta