-
7/28/2019 Pon Taza
1/26
Finite Elements in Analysis and Design 41 (2005) 703 728
www.elsevier.com/locate/finel
Least-squares variational principles and the finite element
method:theory, formulations, and models for solid and fluid
mechanics
J.P. Pontaza
Department of Mechanical Engineering, Texas A&M University,
College Station, TX 77843-3123, USA
Received 31 August 2004; accepted 7 September 2004
Abstract
We consider the application of least-squares variational
principles and the finite element method to the numerical
solution of boundary value problems arising in the fields of
solid and fluid mechanics. For many of these problems
least-squares principles offer many theoretical and
computational advantages in the implementation of the corre-
sponding finite element model that are not present in the
traditional weak form Galerkin finite element model. For
instance, the use of least-squares principles leads to a
variational unconstrained minimization problem where com-
patibility conditions between approximation spaces never arise.
Furthermore, the resulting linear algebraic problemwill have a
symmetric positive definite coefficient matrix, allowing the use of
robust and fast iterative methods for
its solution. We find that the use of high p-levels is
beneficial in least-squares based finite element models and
present guidelines to follow when a low p-level numerical
solution is sought. Numerical examples in the context
of incompressible and compressible viscous fluid flows, plate
bending, and shear-deformable shells are presented
to demonstrate the merits of the formulations. 2005 Elsevier
B.V. All rights reserved.
Keywords: Least-squares finite element formulations;
Incompressible flow; Compressible flow; Plates; Shells
1. Introduction
Finite element formulations based on the weak form Galerkin
procedure are nowadays the preferredapproach to develop finite
element models for problems arising in solid mechanics (e.g.,
linear and
Tel./fax: +1 979 693 9851.E-mail address: [email protected] (J.P.
Pontaza).
0168-874X/$ - see front matter 2005 Elsevier B.V. All rights
reserved.
doi:10.1016/j.finel.2004.09.002
http://www.elsevier.com/locate/finelmailto:[email protected]:[email protected]://www.elsevier.com/locate/finel
-
7/28/2019 Pon Taza
2/26
704 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
nonlinear dynamic analysis of structures). The success of these
formulations is attributed, in its majority,to the fact that a
large class of problems in solid mechanics nicely fit into the
mathematical frameworkof unconstrained minimization, i.e. global
minimization of quadratic (energy) functionals. In this case,
given a conforming discretization, the finite element solution
is the minimizer of an energy functional onthe trial space and
represents the best possible approximation in the energy norm
[1].
Problems that do not fit into the mathematical framework of
unconstrained minimization lack many of
the attractive properties of the (unconstrained) variational
setting. For example, problems of the saddle-point type, arising in
mixed formulations. For such problems, implementation of weak form
Galerkin
finite element models without accounting for restrictive
conditions leads to a non-optimal finite elementapproximation and
un-reliable numerical results. A typical example is given by the
primitive variableformulation of the Stokes problem for which the
velocity and pressure approximation spaces cannot be
chosen independently and must satisfy an infsup condition [2].In
the context of the Stokes and/or the NavierStokes equations,
various finite element models attempt-
ing to fully or partially recover some of the properties of the
(unconstrained) variational setting have beenproposed, and among
them the Galerkin-Least-Squares and stabilized Galerkin
formulations have beenextensively researched (see, e.g., [3,4]).
These approaches have failed to achieve widespread use and
acceptance due to their explicit dependence on various
mesh-dependent calibration parameters that needto be fine-tuned
from application to application.
Finite element models based on least-squares variational
principles are attractive alternatives to the
weak form Galerkin models and their stabilized versions, and are
the focus of this work. Finite elementformulations based on
least-squares principles give rise to unconstrained minimization
problems througha variational framework of residual minimization.
The idea is to define the least-squares functional
as the sum of the squares of the governing equations residuals
measured in suitable norms of Hilbertspaces. Provided the governing
equations (augmented with suitable boundary conditions) have a
unique
solution, the least-squares functional will have a unique
minimizer. Thus, by construction, the least-squaresfunctional is
always positive and convex, ensuring coerciveness, symmetry, and
positive definitivenessof the bilinear form in the corresponding
variational problem. Moreover, if the induced energy norm
is equivalent to a norm of a suitable Hilbert space, optimal
properties of the resulting least-squaresformulation can be
established.
Direct application of least-squares principles to develop finite
element models for 2mth-order dif-
ferential operators require that the finite element space be
spanned by functions that belong to theHilbert space H2m, in
contrast to weak form Galerkin models which require only Hm
regularity. The
lower smoothness requirements associated with the weak form
Galerkin models is due to the weakeneddifferentiability of the
operators, induced by the integration by parts step, which is
absent in least-
squares formulations. The necessary degree of global
differentiability that needs to be retained in theleast-squares
numerical solution is not only dictated by the differentiability
requirements of the gov-erning equation(s) under consideration but
also depends on the norms used to measure the residuals inthe
least-squares functional. The higher smoothness requirement is
considered the major drawback of
least-squares based formulations and is the reason why the
methodology has not yet gained widespreadacceptance.
To reduce the higher regularity requirements and allow the use
of practical C0 element expansions inthe least-squares finite
element model, the governing equation(s) are first transformed into
an equivalentfirst-order system and the least-squares functional
defined by measuring their residuals in terms of L2norms only. This
approach renders the formulation practical, in the sense that
existing computational
http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
3/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 705
frameworks based on C0 expansions are easily adapted to the
least-squares formulations. Transformationof the governing
equations to an equivalent first-order system may necessarily imply
that additionalindependent variables need be introduced, implying
an increase in cost. However, the auxiliary variables
may be argued to be beneficial as they may represent physically
meaningful variables, e.g. fluxes orstresses, and will be directly
approximated in the model.
Benefits from working in an unconstrained variational setting
include the fact that stability requirements
such as infsup conditions will never arise and that the
resulting algebraic problem will have a symmetricpositive definite
(SPD) coefficient matrix. In order to fully emulate the variational
setting, one must
define a L2 least-squares functional that induces an energy norm
that is equivalent to the H1 norm. If
this is achieved, the least-squares finite element solution can
be shown to be an optimal approximationin the H1 norm [5].
Formulations that are not H1 norm equivalent are referred to as
non-equivalentformulations. In practice, we find that H1 coercivity
of the least-squares functional may sometimes onlybe achieved by
requiring the least-squares functional to be defined in terms of
computationally impractical
norms, e.g. H1
norms or H1
norms, the latter requiring the use C1
element expansions for an exactrepresentation.
Ideally, a least-squares finite element model with C0
practicality and full (mathematical) optimality
is to be developedunfortunately, this can seldom be achieved and
we are sometimes forced to choosepracticality over optimality.
Nevertheless, if H1 coercivity of the least-squares functional
cannot beestablished it does not imply that the resulting method is
not optimal. It simply means that its optimality
cannot be determined a priori using standard elliptic theory. In
particular, we find that use of high p-levels is desirable for
least-squares based finite element models and that such practice
provides a desirablebalance between practicality and
optimality.
The objective of this work is to present least-squares based
finite element models for problems ofengineering relevance in the
fields of fluid and solid mechanics, exemplified by incompressible
and
compressible viscous fluid flow, the bending of thin plates, and
shear-deformable shell structures. Indoing so, we show that the use
of high p-levels mitigates the ills associated with
non-equivalence. Inaddition, we consider collocation least-squares
procedures, which can be used to obtain least-squares
numerical solutions at low p-levels.An overview of the paper is
as follows. In Section 2, we present an abstract least-squares
formulation for
an initial boundary value problem. We briefly review the
mathematical theory of least-squares based for-
mulations, specifically the notion of norm-equivalence of
least-squares functionals and its consequencesin the form of
optimal a priori error estimates. The formulations and theory set
forth in Section 2 are
presented in a general setting and readily specialize to treat
boundary value problems in fluid and solidmechanics. Sections 3 and
4 are devoted to numerical examples for incompressible and
compressible
fluid flow, and plates and shells. In Section 5 we present a
summary and concluding remarks.
2. An abstract least-squares formulation
In this section we present the steps involved in developing and
arriving at a least-squares based finiteelement model. We wish to
present the procedure in a general setting, and to this end present
the procedure
in the context of an abstract initial boundary value
problem.First, we introduce notation that will be used throughout
this section and in the remainder of this work.
Given the abstract initial boundary value problem, our first
task is to form the least-squares functional;
-
7/28/2019 Pon Taza
4/26
706 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
which may be defined to yield a spacetime coupled or decoupled
formulation. The variational problemstatement is obtained by
defining the least-squares minimization principle in
infinite-dimensional spacesand the corresponding finite element
model obtained by restricting the spaces to finite dimensional
subspaces. These closed spaces are spanned at the element level
by piecewise nodal/modal polynomialexpansions.
Of paramount importance is to establish whether or not the
resulting least-squares based formulation is
within the ideal mathematical setting, i.e., whether or not the
least-squares functional defines an equivalentnorm in a suitable
Hilbert space. Although norm-equivalence is always desirable, it
sometimes needs to
be sacrificed to yield practical finite element models. We
discuss the properties that are lost when thiscompromise between
optimality and practicality is made, and show through a numerical
example, howthe use of high p-levels mitigates the ills of
non-equivalence.
In conclusion, we present a point collocation least-squares
formulation, where the least-squares func-tional is defined as the
sum of the squares of the equations residuals evaluated at a finite
number of
(collocation) points. Under certain conditions, this formulation
may be used to obtain accurate least-squares solutions at low
p-levels.
2.1. Notation
Let be the closure of an open bounded region in Rd, where d= 2
or 3 represents the number ofspace dimensions, and x=(x1, . . . ,
xd)=(x,y,z) be a point in =j, where j= is the boundaryof.
For s0, we use the standard notation and definition for the
Sobolev spaces Hs () and Hs () with
corresponding inner products denoted by (
,
)s, and (
,
)s, and norms by
s, and
s,, respectively.
Whenever there is no chance of ambiguity, the measures and will
be omitted from inner productand norm designations. We denote the
L2() and L2() inner products by (, ) and (, ), respectively.By Hs
() we denote the product space [Hs ()]d. We denote by H10 () the
space consisting of H1()functions that vanish on the boundary and
by L2() the space of all square integrable functions withzero mean
with respect to .
2.2. The abstract problem
Consider the following abstract initial boundary value
problem:
Lt(u) +Lx(u) = f in (0, ], (1)
G(u) = h on (0, ], (2)
where > 0 is a real number denoting time,Lt andLx are linear
first-order partial differential operatorsin time and space
respectively, acting on the vector u of unknowns, f is a known
vector valued forcing
function, G is a trace operator acting on u, and h represents a
known vector-valued function on theboundary. We assume initial
conditions are given such that the problem is well posed and a
unique
solution exists.
-
7/28/2019 Pon Taza
5/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 707
2.3. L2 least-squares formulation
The L2 least-squares functional associated with the abstract
initial boundary value problem is con-
structed by summing up the squares of the equations residuals in
the L2 norm and is given by
J(u; f, h) = 12 (Lt(u) +Lx(u) f20,(0,] + G(u) h20,(0,]). (3)It
is easy to see that the minimizer of (3) solves (1)(2) and
viceversa.
Note that in presenting the abstract initial boundary value
problem and defining its associated least-squares functional we
made two restrictions: (1) the temporal and spatial partial
differential operators
are of first-order and (2) the least-squares functional is
defined exclusively in terms of L2 norms. Theserestrictions are
necessary in order to ensure a pre-determined level of practicality
in the resulting least-
squares finite element model: specifically, the permission to
use finite element spaces with merely C0
regularity across inter-element boundaries. This is done with
the understanding that the resulting finite
element formulation may depart from the ideal mathematical
setting and hence may not yield optimal apriori error estimates.
Nevertheless, as we shall demonstrate with the aid of numerical
examples, suchdepartures from the ideal mathematical setting will
not result in disaster (as a violation of an infsupcondition would,
in a weak form Galerkin formulation). In fact, least-squares
formulations that depart
from the ideal mathematical setting show remarkable robustness
and are ableto recover optimal asymptoticconvergence behavior
provided the finite element spaces are spanned by sufficiently high
p-levels.
If the partial differential equations (PDEs) under consideration
are not of first-order, the C0 practicalityof the least-squares
finite element model comes at an extra cost, implied in restriction
(1); which requiresthat the partial differential operators be of
first-order. This can always be achieved by introducing
auxiliary
variables until a first-order system is attained. The added cost
might be viewed as beneficial, in the sensethat the auxiliary
variables may have physical relevance to the problem under
consideration, e.g., fluxesor stresses.
2.3.1. Spacetime coupled formulation
In addition, note that prior to defining functional (3) we did
not replace the temporal operator with a
discrete equivalent. This results in a fully spacetime coupled
formulation, implied in the definition offunctional (3) where the
L2 norm is defined in spacetime, i.e., 0,(0,] denotes the L2 norm
of theenclosed quantity in spacetime:
u20,(0,] =
0
|u|2 d dt.
This implies, for example, that a two-dimensional time-dependent
problem will be treated as a three-dimensional problem in spacetime
domain. When dealing with the stationary form of the equations
theintegral over time domain is simply dropped.
In the spacetime coupled approach, the effects of space and time
are allowed to remain coupled. There
is no approximation of the initial boundary value problem.
Instead, a basis is introduced in time domainto represent the time
evolution of the independent variables.
Invariably, we as analysts would like to simulate and study the
time evolution of an initial boundary
value problem for large values of time. Taking into
consideration modelling issues, we realize that thiswould require a
spacetime mesh with a large number of elements in time domain. The
size of the
resulting set of assembled algebraic equations could be large
and prohibitively expensive in terms of
-
7/28/2019 Pon Taza
6/26
708 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
available computer memory and non-optimal in terms of CPU solve
time. To alleviate the drawbacks, weadopt a time-stepping procedure
in which the solution is obtained for spacetime strips in a
sequentialmanner. The initial conditions for the current spacetime
strip are obtained from the latest space plane
from the previous spacetime strip. Hence, for each spacetime
strip we solve a true initial boundaryvalue problem, by minimizing
the following functional in spacetime domain:
J(u; f, h) = 12 (Lt(u) +Lx(u) f20,[ts ,ts+1] + G(u) h20,[ts
,ts+1]), (4)where the interval [ts , ts+1] can be taken arbitrarily
large, i.e., there are no restrictions on the size of
theinterval.
Since the initial boundary value problem in each spacetime strip
is represented and solved withpredetermined accuracy of order p,
the question of time-stepping stability does not arise [6,7]. The
only
issue that remains is temporal accuracy; which we can control by
hp refinements in time. Furthermore,the L2 least squares functional
can provide an error measure for adaptive h, p, or hp refinements
in
spacetime.
2.3.2. Spacetime decoupled formulation
In a spacetime decoupled formulation, discretization in space
and time are done independently. Tra-ditionally, the temporal
operators are represented by truncated Taylor series expansions in
time domain.Such formulations result in an inherent approximation
of the initial boundary value problem and thus the
investigation of stability is essential. Representation of the
temporal operator by high-order approxima-tions, such as multi-step
schemes, are only conditionally stable; imposing severe limitations
on the size
of the allowable time increment.In a spacetime decoupled
formulation the temporal operator in Eq. (1) is replaced by a
discrete
equivalent:
Lt(u) Lt(us+1, usq ),where the dependence of the discrete
operator on the time incrementtis explicit as well as its
dependenceon histories of previous time steps. For sufficiently
small t, the modified problem is equivalent to theoriginal problem.
To march the problem in time using a least-squares spatial finite
element model, we
must minimize the following space functional at each time
step:
Jt(u; f, h) = 12 (Lt(us+1, usq ) +Lx(us+1) fs+120, + G(us+1)
hs+120,). (5)
2.4. The variational problem
Having defined the least-squares functional (3), the abstract
least-squares minimization principle canbe stated as:
find u X such that J(u; f, h)J(v; f, h) v X, (6)where X is a
suitable vector space, e.g. X = H1( (0, ]), and we assume that the
functions f, h aresufficiently regular, e.g. f L2( (0, ]) and h L2(
(0, ]).
The EulerLagrange equation for this minimization problem is
given by the following variationalproblem [1]:
find u X such that B(u, v) =F(v) v X, (7)
http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
7/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 709
where B is a symmetric form given by
B(u, v)
=(L(u),L(v))0,
(0,
] +(G(u),G(v))0,
(0,
]and F is a functional given by
F(v) = (f,L(v))0,(0,] + (h,G(v))0,(0,],where L=Lx +Lt.
The inclusion of the boundary residual in (3) allows the use of
spaces X that are not constrained tosatisfy the boundary condition
(2). In such a case, the boundary condition (2) is enforced in a
weak sensethrough the least-squares functional. This is a
tremendous advantage of least-squares based formulations,
as it allows boundary conditions that are computationally
difficult to impose to be efficiently included inthe least-squares
functional. An example where this property becomes extremely useful
is for viscous or
inviscid compressible flow (see Section 3), where
characteristic-based boundary conditions need to beprescribed at
outflow/inflow boundaries. Of course, if the boundary condition (2)
can be easily imposedand included in the space X, we omit the
residual associated with the boundary term in (3).
The abstract expressions given above for the symmetric form B
and functional F are only validwhen the partial differential
operators are linear. For the case when the partial differential
operators arenonlinear, the following more general expressions
apply:
B(u, v) = (L(u), L(u))0,(0,] + (G(u), G(u))0,(0,]and
F(v) = (f, L(u))0,(0,] + (h, G(u))0,(0,],where it is understood
that u = v. In general, when the partial differential operators are
nonlinear, theresulting form will be non-symmetric. Symmetry of the
form is restored only when the EulerLagrangeequation is suitably
linearized, e.g., by Newtons method.
2.5. The finite element model
The finite element model is obtained by either restricting (7)
to the finite-dimensional subspace Xhp ofthe infinite-dimensional
space X, or equivalently by minimizing (3) with respect to the
chosen approxi-
mating spaces. This process leads to the discrete variational
problem given by
find uhp Xhp such that B(uhp, vhp) =F(vhp) vhp Xhp. (8)We
proceed to define a discrete problem by choosing appropriate finite
element spaces for each of thecomponents of the vector-valued
function u. There are no restrictive compatibility conditions on
the
discrete spaces, so we choose the same finite element space for
each of the primary variables.Consider the stationary,
two-dimensional case u = (u, v) and letPh = {Q} be a family of
quadrilateral
finite elements e that make up the connected model h
. We map e to a bi-unit square e = [1, 1] [1, 1], where = (1, 2)
= (, ) is a point in e. Over a typical element e, we approximate
u
-
7/28/2019 Pon Taza
8/26
710 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
by the expression
u(, ) uhp
(, ) =n
j=1
jj(, ) in e, (9)
where j are nodal/modal C0 basis functions andj their associated
coefficients. We proceed to generate
a system of linear algebraic equations at the element level
using (8), where the integrals are evaluatedusing Gauss quadrature
rules.
The global system of equations is assembled from the element
contributions to ensure the uniquenessof the degrees of freedom at
element interfaces. The assembled system of equations can be
written as [K11] [K12]
[K12]T [K22] {1}
{2}
= {F1}
{F2}
, (10)
where {1}, {2} are the nodal/modal unknown coefficients
associated with u and v. For details onstandard finite element
methods, such as mapping ee, numerical integration in e, and the
assemblyprocess, see [8].
2.6. Norm-equivalence and its implications
Our ultimate goal is to use (7) to compute approximate solutions
to (1)(2). Clearly, the least-squaresfunctional is consistent in
the sense that for sufficiently smooth data f, h and smooth
solutions u of (1)(2),
J(u; f, h) = 0. Furthermore, by construction, the least-squares
functional is convex and positive. Whichallows us to define an
energy norm:
E =J(; 0, 0)1/2 : X R (11)and an associated energy inner
product:
((, ))E : X X R. (12)Then, ifXhp X,
(1) the variational problem (8) has a unique solution given by
uhp Xhp, and(2) uh is the orthogonal projection ofu with respect to
the energy inner product (12), and thus represents
the best possible solution in the energy norm (11).
In addition, if{i}ni=1 spans Xhp; the variational problem (8) is
a linear system of algebraic equationswhose coefficient matrix K
has entries given by
Kij = ((j,i ))E. (13)Thus, the coefficient matrix K is a Gramm
matrix with respect to the energy inner product (12) and thusis
symmetric and positive definite. As a result, the system KU = F has
a unique solution.
Note that so far we have said nothing about norm-equivalence and
already we have established that theleast-squares finite element
model will yield a convex, unconstrained minimization problem with
a unique
minimizer that coincides with the best possible approximate
solution to (1)(2) in a well-defined norm.
-
7/28/2019 Pon Taza
9/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 711
In addition we have also established that the resulting discrete
algebraic problem will have a symmetricpositive definite
coefficient matrix. This explains the robustness of least-squares
based formulations, evenwhen they depart from the ideal
mathematical setting (which has not yet been established).
Establishing norm-equivalence (and hence, and ideal mathematical
setting) will enable us to predictthe asymptotic behavior of how
uhp approaches u. For simplicity, consider the stationary version
of (1)with homogeneous boundary conditions and let X = H10(). If
the coercivity relation
C2u1,L(u)0,C1u1, (14)holds for all smooth solutions u of (1)(2),
then the L2 least-squares functional defines an equivalentnorm in
H1 in the sense
12 C
22u21,J(u) 12 C21u21, (15)
or equivalently (and for the more general case),
12
C22u2Xu2E 12 C21u2X (16)and optimal h-convergence rates should
be attained as follows [5]:
u uhpr,Chp+1r , r = 0, 1 (17)for smooth solutions u, with C
independent ofh. If norm-equivalence cannot be established the
constant
C may be dependent on the mesh parameter h and/or not much can
be said about the optimality of theconvergence rates of the
resulting formulation. This, however, does not imply that the
resulting method
is non-optimal. It simply means that its optimality cannot be
determined a priori using standard elliptictheory.
We illustrate the behavior of a non-equivalent formulation with
the numerical solution of the stationary
incompressible NavierStokes equations in its
velocitypressurevorticity based first-order form, whichfails to
define an H1 coercive formulation for the pure velocity boundary
condition [9]. For the purposes
of this demonstration, we solve the well-known two-dimensional
lid-driven cavity problem in a seriesof meshes and for different
p-levels such that the total number of degrees of freedom remains
constant.For each case we plot the u-velocity profile along the
geometric vertical mid-line of the cavity and the
v-velocity profile along the geometric horizontal mid-line of
the cavity. We take the target solution tobe that reported and
tabulated by Ghia et al. [10], frequently used and widely accepted
as a validationbenchmark.
Figs. 1 and 2 show the u- and v-velocity profiles along the
geometric vertical and horizontal mid-
lines of the cavity. For the 60 60 finite element mesh with a
p-level of 1 (i.e., bi-linear elements), thepredicted velocity
profiles are surprisingly of extremely poor quality. Initially one
might be disappointedat the performance of the least-squares based
formulation, as the 60 60 bi-linear finite element meshwill give
considerably better results with a weak form Galerkin formulation.
However, knowing that
the least-squares functional we used to develop the finite
element model does not define an equivalentnorm in Xhp X, we
conjecture that the constant C in Eq. (17) depends on the mesh
parameter h andthus expect a poor numerical solution. To keep the
cost of the computation comparable and the total
number of degrees of freedom constant we consider a 30 30 finite
element mesh with a p-level of 2(i.e., bi-quadratic elements). The
predicted velocity profiles are significantly improved, however not
yet
completely satisfactory. Still we are led to believe that the
constant C depends on the mesh parameter h
-
7/28/2019 Pon Taza
10/26
712 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
y 6060, p = 1
3030, p = 2
1010, p = 6
Ghia et al.
1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0.50 0.25
u - velocity
0.00 0.25 0.50 0.75 1.00
Fig. 1. u-velocity profiles along the vertical mid-line of the
cavity at flow conditions Re = 103.
x
1.00
3030, p = 2
1010, p = 6
Ghia et al.
0.750.50
v-velocity
0.6
0.5
0.4
0.3
0.2
0.1
0.0
0.1
0.2
0.3
0.4
0.5
0.60.00 0.25
6060, p = 1
Fig. 2. v-velocity profiles along the horizontal mid-line of the
cavity at flow conditions Re = 103.
but with a weakened dependence at this p-level. Finally, we
consider a 10 10 finite element mesh witha p-level of 6, where the
total number of degrees of freedom is the same as for the previous
two cases.The predicted velocity profiles are in excellent
agreement with the benchmark solution and we are led
to believe that at this p-level the dependence of the constant C
on the mesh parameter h is negligible ornonexistent. Typically a
p-level of 4 is sufficient to assure negligible or nonexistent
dependence on themesh parameter h.
The above illustrative example shows that if a non-equivalent
least-squares functional is used to developthe finite element
model, high-order expansions are desirable. If low-order expansions
are to be used (i.e.,
p-levels of 1 or 2), it is best to use non-standard
least-squares procedures such as collocation.
-
7/28/2019 Pon Taza
11/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 713
2.7. A least-squares collocation formulation
In this subsection we present a least-squares finite element
point collocation formulation, which does
not directly fit into the mathematical framework presented
earlier. To define the least-squares point
collocation formulation, we chose a finite set of points
{xm}Cm=1 in h and {xn}Cbn=1 on h, and define theleast-squares
functional as the sum of the weighted squares of the residuals
evaluated at the points xmand xn:
J() =I
i=1
Cm=1
im (RiL(, xm))
2 +J
j=1
Cbn=1
j n(RjG(, xn))
2. (18)
In Eq. (18), RiL denotes the residual associated with the ith
partial differential operator and RjG the
residual associated with the jth boundary operator,
RiL =Lix(uhp) fi i = 1, 2, . . . , I ,R
jG
= Gj(uhp) hj j = 1, 2, . . . , J .In addition, the weights im
and j n may be different for each governing equation and/or
collocationpoint.
Upon minimization of (18) with respect to the nodal/modal
coefficients in we arrive at the system ofequations, which can be
written as [K11] [K12]
[K12]T [K22] {1}
{2}
= {F1}
{F2}
, (19)
where {1}, {2} are the modal/nodal unknown coefficients
associated with u and v. A reliable least-squares collocation
solution is achieved when the number of collocation residual
equations (C I ) +(Cb J ) is equal to the number of nodal/modal
degrees of freedom Ndof Nbc, where Nbc is the numberof prescribed
Dirichlet boundary conditions on . Denoting the ratio between the
number of collocationresidual equations and the number of nodal
degrees of freedom by , i.e.,
= (C I ) + (Cb J )Ndof Nbc , (20)
ideally we would like asclosetounityaspossible.Forhigh p-levels,
1.0fromaboveasthe p-level isincreased. At low p-levels, may be
forced to unit value by judicious choice of the number of
collocation
points. Additional discussion, including illustrative examples,
may be found in [11]. Numerous othertypes of least-squares
formulations my be found in the review of Eason [12].
3. Viscous incompressible and compressible fluid flows
The majority of work for incompressible flow has been done in
the context of collocation least-squares
models at low p-levels. This is the preferred approach in the
work of Jiang [13,14], Jiang and Chang[15], Jiang and Povinelli
[16] and Tang et al. [17], although they refer to their collocation
solutions as
reduced integration solutions; because their collocation points
coincide with the GaussLegendre reduced
http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
12/26
714 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
integration points. The use of high p-levels in least-squares
formulations has been demonstrated by Prootand Gerritsma [18] in
the context of Stokes flow, and by Pontaza and Reddy [19,7,11] for
the steady andunsteady NavierStokes equations. Here, we demonstrate
exponentially fast decay of error measures,
resulting from p-refinement, with a (incompressible flow)
verification benchmark.Least-squares formulations for compressible
flows have been limited to inviscid flows (i.e., the com-
pressible Euler equations) [2022]. Here, we present numerical
results for viscous compressible flows
in the subsonic and transonic regimes. Such formulations are
aimed at flow problems characterized byincompressible flow in parts
of the domain with imbedded regions where compressibility effects
are
significant and cannot be neglected. Numerical results are
presented for flow past a NACA0012 airfoil atMach 0.85, Re = 500
and Re = 2000.
3.1. Governing equations
We consider the solution of the NavierStokes equations governing
viscous compressible flow of anideal, Newtonian gas. The governing
equations for incompressible flow are but a special case, so
weconsider the more general form of the equations. The governing
equations in dimensionless form can be
written as:Find the density (x, t), velocity u(x, t ), pressure
p(x, t), and temperature T (x, t ) such that
j
jt+ (u ) + ( u) = 0 in (0, ], (21)
ju
jt+ (u )u + p 1
Re [(u) + (u)T] 1
Re( u) = f in (0, ], (22)
jT
jt+ (u )T 1
P e (kT ) ( 1)M2 Dp
Dt= ( 1)M
2
Re in (0, ], (23)
1 + M2p = T in (0, ], (24)where M is the Mach number, Pr is the
Prandtl number, Re is the Reynolds number, Pe = RePr is thePeclet
number, is the ratio of specific heats, is the dynamic viscosity,
is the bulk viscosity, k is thecoefficient of thermal conductivity,
and is the viscous dissipation function,
= ( u)2 + 2D : D,with D = 12 [(u) + (u)T] denoting the
deformation tensor. We assume initial and boundary conditionsare
given such that the problem is well posed.
The equations have been normalized using the reference values
(ref, uref, pref, Tref) as ref = 0,uref = u0, pref = 0RT0, Tref =
T0, and a reference length L, where (0, u0, T0) is a given
characteristicstate and R is the universal gas constant. This gives
a Reynolds number as Re = 0u0L/0, a Prandtlnumber as P r = cp0/k0,
and a Mach number as M = u0/
RT0. The dimensionless pressure p has
been defined as
p = p pref0u
20
,
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
13/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 715
where p denotes the dimensional (total) pressure. The dynamic
viscosity and coefficient of thermalconductivity are modelled as
temperature dependent using Sutherlands law,
= (T )0
=
T
T0
3/2 T0 + S
T + S, k = k(T)
k0=
T
T0
3/2 T0 + Sk
T + Sk,
where S = 110 K and Sk = 194 K for atmospheric air.When M = 0
and isothermal conditions are considered (jT = 0) the
incompressible NavierStokes
equations are recovered:
u = 0 in (0, ], (25)ju
jt+ (u )u + p 1
Re [(u) + (u)T] = f in (0, ]. (26)
IfM=0 and the flow experiences non-isothermal conditions (jT =
0), the low-speed compressible flowequations are recovered with the
proper equation of state.
Recall from Section 2, that to ensure the C0 practicality of the
least-squares finite element modelthe governing equations must be
recast as an equivalent first-order system and the least-squares
func-tional defined in terms of L2 norms only. The NavierStokes
equations, in particular the conservation
of momentum and energy equations, contain second-order
derivatives implying u H2, T H2 asa minimum requirement. A
least-squares finite element model can indeed be developed by using
theNavierStokes equations in their strong form, however such
formulation would require C1 regularity of
the finite element spaces across inter-element boundaries as a
minimum requirement (see [11] for C1
formulations and numerical examples).
Wishing to retain the C0 practicality of the finite element
model we realize that auxiliary variablesneed to be introduced to
recast the NavierStokes as an equivalent first-order system. Here
we use the vor-ticity based first-order system for the
incompressible NavierStokes and the velocity/temperature
gradient
based first-order system for the compressible NavierStokes
equations. The least-squares formulation andfinite element model
follow from the outline given in Section 2.
3.2. Kovasznay flow
The benchmark problem to be used for the purposes of
verification is an analytic solution to the two-dimensional,
stationary incompressible NavierStokes due to Kovasznay [23]. The
spatial domain in
which Kovasznays solution is defined is taken here as the
bi-unit square
= [0.5, 1.5
] [0.5, 1.5
].
The solution is given by
u(x,y) = 1 ex cos(2y),
v(x,y) = 2
ex sin(2y),
p(x,y) = p0 12 e2x , (27)where = Re/2 (Re2/4 + 42)1/2, p0 is a
reference pressure (an arbitrary constant), and we chooseRe =
40.
-
7/28/2019 Pon Taza
14/26
716 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
2 3 4 5 6 7 8 9 101018
LS functional
|| u - up
||
|| v - vp
||
|| p - pp
||
|| - p
||
expansion order, p
L2norm
1016
1014
1012
1010
108
10610
4
102
100
Fig. 3. Decay of the least-squares functional and convergence of
the velocity, pressure, and vorticity fields to the
Kovasznaysolution in the L2 norm. p-convergence.
Here, we perform a p-refinement study. For such a study, we
choose and fix a spatial discretization
h
, and systematically increase the p-level of the element
approximation functions. Fig. 3 shows the
discretization of the domain, h
, for the p-refinement study. The discretization consists of 8
quadrilateralfinite elements e. Having chosen appropriate error
measures, these measures should decay exponentiallyfast as the
p-level is increased. In a logarithmic-linear scale the expected
rate of convergence would appear
as a straight line.The exact solution, given by Eq. (27), is
used to prescribe Dirichlet velocity boundary conditions
on and pressure is specified at a point. No boundary conditions
for the vorticity are necessary. The
linearization is done using Newtons method and the resulting
linear algebraic system of equations witha symmetric positive
definite coefficient matrix solved using Cholesky factorization at
each Newton step.
Nonlinear convergence was declared when the relative norm of the
residual in velocities, uhp/uhp,was less than 104, which typically
required three to five Newton iterations.
In Fig. 3 we plot the L2 least-squares functional and L2 error
of the velocity, pressure, and vorticity
fields as a function of the expansion order in a
logarithmic-linear scale. Exponentially fast decay
(spectralconvergence) of the L2 least-squares functional and L2
error is observed. Decay of the least-squaresfunctional implies
that the L2 norm of the residuals of the governing equations are
going to zero, i.e.,
conservation of mass and momentum are being satisfied. Decay of
the L2 norms of the difference between
the numerical solution and the analytic solution indicates that
the numerical solution approaches the exactsolution.
Of importance is to test whether the formulation is able to
achieve the optimal asymptotic convergencerate in geometrically
distorted meshes. To this end, we perform a p-refinement study for
the geometrically
distorted mesh shown in Fig. 4.In Fig. 4 we plot the L2
least-squares functional and L2 error of the velocity, pressure,
and vorticity
fields as a function of the expansion order in a
logarithmic-linear scale for the analysis in the geometrically
distorted mesh. Exponentially fast decay (spectral convergence)
of the L2 least-squares functional and
L2 error is observed. As expected, for the distorted mesh,
slightly higher p-levels are needed to obtain
the same level of accuracy when compared to the geometrically
undistorted mesh results.
-
7/28/2019 Pon Taza
15/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 717
2 3 4 5 6 7 8 9 10 11 1210
18
1016
1014
1012
1010
108
106
10
4
102
100
LS functional
|| u - up
||
|| v - vp
||
|| p - pp
||
|| - p
||
expansion order, p
L2norm
Fig. 4. Distorted mesh study: decay of the least-squares
functional and convergence of the velocity, pressure, and vorticity
fieldsto the Kovasznay solution in the L2 norm. p-convergence for
the geometrically distorted mesh.
3.3. Compressible flow past a NACA0012 airfoil
We present results for two of the standard benchmarks problems
of the GAMM workshop [24]. The flowconditions considered here
correspond to a free-stream Mach number of 0.85 and free-stream
Reynolds
numbers of 500 and 2000. The airfoil is of unit chord length and
is placed in the finite region =[4.0, 8.0] [5.0, 5.0]. The leading
edge of the airfoil lies at (x,y) = (0, 0), so that the
inflowboundary is located 4 chord-lengths in front of the leading
edge and the outflow boundary 7 chord-
lengths downstream of the trailing edge. The top and bottom
boundaries are located each 5 chord-lengthsabove and below the
airfoil.
The issue of open boundary conditions of inflow and outflow type
for the compressible NavierStokesequations is of paramount
importance and non-trivial. It has been the subject of extensive
research andnumerical experimentation (see, for example, [2529]).
Here, we apply inflow and outflow boundary
operators which ensure maximum energy dissipation and result in
a strongly well-posed problem. Inthe limit of vanishing viscosity,
the boundary operators recover the Euler characteristics. The
complex
boundary conditions in terms of characteristic variables are
enforced in the finite element model throughthe least-squares
functional. Details and derivation of the well-posed boundary
operators may be found in[28]. No-slip boundary conditions are
specified on the airfoil surface: u = v = 0, together with
prescribedtemperature corresponding to the free-stream total
temperature.
We are interested in a point collocation solution (see Section
2.7), obtained by requiring the least-
squares functional to vanish at specific points in the
computational domain. The connected model, h
, ischaracterized by the total number of elements Nel, number of
elements around the airfoil Nel,s, a far-field
element size , and the size of adjacent elements to the airfoil
. We present results for a bi-linear finiteelement mesh with Nel =
11, 250, Nel,s = 120, = 0.001, = 0.30. Fig. 5 shows the mesh, where
aclose-up view of the element distribution around the trailing edge
is also shown.
The collocation points are chosen to lie at the center of the
elements, so that the total number of interiorcollocation points,
Ncoll, is equal to the total number of elements in the finite
element mesh. In addition to
the interior collocation points, we chose collocation points at
the inflow and outflow boundaries to enforce
http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
16/26
718 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
x
y
0.6
0.4
0.2
0.0
0.2
0.4
0.6 0.03
0.02
0.01
0.00
0.01
0.02
0.03
(a) (b)
0.5 0.0 0.5 1.0 1.5
Fig. 5. Computational domain and mesh for compressible flow past
a NACA0012 airfoil. (a) Partial view of the connected model,
h
. (b) Close-up view of the element distribution near the
trailing edge.
s/c
Cp
0.00 0.25 0.50 0.75 1.000.6
0.4
0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.21.4
collocation least-squares
Satofuka et al. (1987)collocation least-squaresSatofuka et al.
(1987)
s/c
Cf
0.00 0.25 0.50 0.75 1.000.00
0.05
0.10
0.15
0.20
0.25
0.300.35
(a) (b)
Fig. 6. Predicted steady-state (a) pressure and (b)
skin-friction coefficients for M
=0.85, Re
=500.
the open-type boundarycondition through the least-squares
functional.These boundarycollocation points,
Ncoll,b, lie at the center of each element edge along the
outflow boundary.
As explained in Section 2.7, a reliable least-squares
collocation solution can only be achieved if a strictbalance
between the number of collocation residual equations and number of
nodal degrees of freedom issatisfied. Such balance is achieved when
the effectivity (or reliability) index , given by Eq. (20), is
close
to unity. For the problem under consideration, = 1.035, ensuring
a reliable least-squares collocationsolution.
To treat the unsteady nature of the problem, we implement a
spacetime decoupled formulation (see
Section 2.3.2). The temporal terms in the governing equations
are represented by the generalized -
method family of approximations [31,32], which retain
second-order accuracy in time. Even though bothsimulations pursued
here posses a steady-state solution, a time accurate simulation is
performed.
At each time step and for each Newton linearization step, the
resulting system of equations with a SPDcoefficient matrix is
solved using a matrix-free pre-conditioned conjugate gradient (PCG)
algorithm with
a Jacobi preconditioner. PCG convergence was declared when the
norm of the residual, KU F, wasless than 106. Nonlinear convergence
was declared when the relative norm of the residual in
velocitiesbetween two consecutive iterations was less than 104,
which typically required two or three Newtoniterations per time
step.
Fig. 6 shows the predicted steady-state pressure and
skin-friction coefficients for the case M =0.85, Re = 500. Also
shown in the figure, are the reported numerical results of Satofuka
et al. [33],
http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
17/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 719
0.
78
0.75
1.00
1.0
0
1.03
1.03 0.96
0.96
0.69
(a)
(b)
Fig. 7. Steady-state (a) Mach and (b) pressure contours for M =
0.85, Re = 500.
Cp
0.00 0.25 0.50 0.75 1.00
0.6
0.4
0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
collocation least-squaresSatofuka et al. (1987)Mittal (1998)
s/cs/c
Cf
0.00 0.25 0.50 0.75 1.00
0.00
0.05
0.10
0.15
0.20
collocation least-squaresMittal (1998)
(a ) ( b )
Fig. 8. Predicted steady-state (a) pressure and (b)
skin-friction coefficients for M = 0.85, Re = 2000.
using a finite-difference discretization scheme. We see
excellent agreement between the predicted andbenchmark profiles.
Fig. 7 shows steady-state Mach and pressure contours. In accordance
with theGAMM benchmark results [24], we see a symmetric supersonic
pocket near the mid-section of the
airfoil.Similarly, Fig. 8 shows the predicted steady-state
pressure and skin-friction coefficients for the case
M = 0.85, Re = 2000. We compare our numerical results with those
reported by Satofuka et al. [33]and Mittal [34], and find good
agreement. From Fig. 9 we see that at this higher Reynolds number,
thesupersonic pocket has moved towards the nose of the airfoil.
Table 1 shows good agreement between the
computed drag coefficient and the values reported in the GAMM
workshop [24].
-
7/28/2019 Pon Taza
18/26
720 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
(a)
(b)
1.00
1.00
1.04
1.04
0.97
0.97
0.95
0.95
0.76
0.79
Fig. 9. Steady-state (a) Mach and (b) pressure contours for M =
0.85, Re = 2000.
Table 1
Drag coefficient for flow past a NACA0012 airfoil
Mach Re Parameter Computed Benchmark [24]
0.85 500 CD 0.2337 0.2261
0.2300
0.85 2000 CD 0.1188 0.1160
0.1164
4. Plates and shells
Finite element formulations for the analysis of plates and shell
structures are traditionally derived
from the principle of virtual displacements or the principle of
minimum total potential energy [1]. When
considering the limiting behavior of a shell as the thickness
becomes small, for a given shell geometry andboundary conditions,
the shell problem will in general fall into either a membrane
dominated or bendingdominated statedepending on whether the
membrane or bending energy component dominates the totalenergy.
Displacement-based finite element models have no major difficulties
in predicting the asymptotic
behavior of the shell structure in the membrane dominated case.
However, computational difficulties arisein the case when the
deformation is bending dominated [35]. A strong stiffening of the
element matricesoccurs, resulting in spurious predictions for the
membrane energy component. This phenomenon is known
as membrane-locking. In shear-deformable shell models, yet
another form of locking occurs and presentsitself (again) in a
strong stiffening of the element matrices, resulting in spurious
predictions for the
shear energy component. This form of locking is also present in
plate bending analysis when the side-to-
-
7/28/2019 Pon Taza
19/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 721
thickness ratio of the plate is large (i.e., when modelling thin
plates). This locking phenomenon is knownas shear-locking.
Least-squares finite element formulations for plates and shells
have been shown to be robust with
regards to membrane- and shear-locking and to yield highly
accurate results for displacements as well asstresses (or stress
resultants) [36,37]. The formulations retain the generalized
displacements and stressresultants as independent variables and, in
view of the nature of the variational setting upon which the
finite element model is built, allows for equal-order
interpolation. In the following we present numericalresults for the
bending of a thin circular plate under uniform loading and for a
barrel vault (cylindrical
shell) loaded by its own weight.
4.1. Governing equations
We consider circular cylindrical shells, where the shell
mid-surfaceS is given by
S= {L < x1 < L , x22 + x23 = R2 | (x1, x2, x3) R3} R3,
(28)where 2L and R are the length and radius of the shell. The
shell mid-surface S, given by Eq. (28), can
be parametrized by the single chart = (1,2,3), : R2 S R3,1(
1, 2) = 1,2(
1, 2) = R sin(2/R),3(
1, 2) = R cos(2/R), (29)so that is the rectangle occupying the
region
{(1, 2) | L < 1 < L, R< 2 < R} R2. (30)In Naghdis
shear-deformable shell model [38], the membrane, bending, and shear
strain measures
(, , ) are [37]
11 = u1,1, 212 = u1,2 + u2,1, 22 = u2,2 + u3R
, (31)
11 = 1,1, 212 = 1,2 + 2,1 +u2,1
R, 22 = 2,2 +
1
R
u2,2 + u3
R
, (32)
1 = u3,1 + 1, 2 = u3,2 + 2 u2
R (33)
and the equilibrium equations take the form
N11,1 + N12,2 + p1 = 0, (34)
N12,1 + N22,2 +M12,1
R+ M
22,2
R+ Q
2
R+ p2 = 0, (35)
Q1,1 + Q2,2 N22
R M
22
R2+ p3 = 0, (36)
http://-/?-http://-/?-http://-/?-
-
7/28/2019 Pon Taza
20/26
722 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
M11,1 + M12,2 Q1 = 0, (37)M12,2
+M22,2
Q2
=0, (38)
where u are the displacements of the shell mid-surface, u3 is
the out-of-plane displacement, arerotations of the transverse
material fibers originally normal to the shell mid-surface, and N,
M,
Q are the membrane, bending, and shear thickness-averaged stress
resultants. Here we employ the
convention that Greek indices range over 1 and 2 and that ,
denotes differentiation.The stress resultants are related to the
strain measures through the following constitutive relations
[38]:
N11 = tE(1 2) (11 + 22), N
22 = t E(1 2) (11 + 22), N
12 = tE(1 + )12, (39)
M11
=
t3E
12(1 2
)
(11
+22), M
22
=
t3E
12(1 2
)
(11
+22),
M12 = t3E
12(1 + )12, (40)
Q1 = tE2(1 + ) Ks1, Q
2 = tE2(1 + ) Ks2, (41)
where t is the thickness of the shell, E is theYoungs modulus,
is the Poissons ratio, and Ks is the shear
correction factor for the isotropic material. If we letR we
recover the (linear) shear-deformable platebending strain measures
and governing equations, where membrane and bending effects are
decoupled.
The equilibrium equations (34)(38) and constitutive relations
(39)(41) are already of first-order and
are used to define the least squares functional. The
least-squares formulation and finite element modelfollow from the
outline given in Section 2.
4.2. Simply supported circular plate
Consider a simply supported, circular isotropic plate subjected
to a uniformly distributed load ofintensity q0. The total domain of
the plate is [t /2, t /2], where t is the thickness of the plate.
Theundeformed mid-plane of the plate, , has dimensions [0, a] [0,
2]. Due to the symmetry only onequadrant of the plate need be
modelled. The connected model of the quarter plate,
h, used for the analysis
is shown in Fig. 10.Here we are considering pure bending, and
work with the following dimensionless definitions for the
generalized displacement and thickness-averaged stress
resultants,
u3 = u3 Dq0a4
, = Dq0a3
, M = M
q0a2, Q = Q
q0a, (42)
where D = Et3/12(1 2) is the flexural rigidity of the plate. In
the actual computations we simply takea = 1.0, q0 = 1.0, D = 1.0,
and vary a/t.
It is known that for the traditional (i.e., based on the weak
form Galerkin procedure) displacement-basedfinite element
formulations, even high-order elements still do not display a good
predictive capability,
particularly when the elements are geometrically distorted and
used for stress predictions. Of particular
-
7/28/2019 Pon Taza
21/26
J.P. Pontaza / Finite Elements in Analysis and Design 41 (2005)
703 728 723
Q1
Q1
Least-squares Galerkin
Fig. 10. Predicted shear force contours for a uniformly loaded
simply supported circular plate with diameter-to-thickness
ratio
100. The mesh is geometrically distorted with the p-level fixed
at 4 for both least-squares and weak form Galerkin elements.
xz
20.0
15.0
10.0
5.0
0.0
5.0
10.0
15.0
20.0
y / a y / a
yz
0.00 0.25 0.50 0.75 1.00 0.00 0.25 0.50 0.75 1.000.0
1.0
2.0
3.0
4.0
5.0
6.0analytic
Least-squaresGalerkin
analytic
Least-squaresGalerkin
( a ) (b )
Fig. 11. Transverse shear stresspredictions along a vertical
radial line. Simply supported circular plate with
diameter-to-thickness
ratio 100. p-level fixed at 4 for both least-squares and weak
form Galerkin elements.
interest is the transverse shear stress prediction, as it is
often the most difficult stress component to predictfor Galerkin
shear-deformable plate elements. The circular plate problem is
ideal to asses the accuracyof the prediction as the analytical
solution is readily available in closed form [1] and the elements
are
naturally distorted to accommodate the plate geometry.
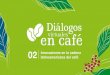
In Fig. 10 we present contour plots of the predicted shear
force, Q1, for a plate with = 0.30 anddiameter-to-thickness ratio
of 100 (2a/ t = 100) at a p-level of 4. The Galerkin plate elements
givespurious shear force predictions, displaying a localized
locking behavior near the curved boundary. Onthe other hand, the
least-squares plate elements give a smooth and highly accurate
shear force prediction
throughout.In Figs. 11 and 12 we present the predicted
transverse shear stress distributions. Fig. 11 shows the
distributions along a vertical radial line and Fig. 12 along the
circular arc, with measured counterclock-
wise. We plot the stresses at the elements nodal mid- and
end-points. For comparison, we also presentresults obtained using
the displacement based Galerkin formulation using the same mesh and
p-level.
Clearly, the stress predictions using the proposed least-squares
formulation are superior.
-
7/28/2019 Pon Taza
22/26
724 J.P. Pontaza / Finite Elements in Analysis and Design 41
(2005) 703 728
, degrees
z
0 10 20 30 40 50 60 70 80 9020.0
15.0
10.0
5.0
0.05.0
10.0
15.0
20.0
analyticLeast-squares
Galerkin
, degrees
rz
0 10 20 30 40 50 60 70 80 903.0
4.0
5.0
6.0
7.0
8.0
9.0
analyticLeast-squares
Galerki
Fig. 12. Transverse shear stress predictions along the plates
circular arc. Simply supported circular plate with diame-
ter-to-thickness ratio 100. p-level fixed at 4 for both
least-squares and weak form Galerkin elements.
4.3. Barrel vault
We consider a barrel vault loaded by its own weight. The barrel
vault is a segment of a circular cylindricalshell whose
mid-surface, after being parametrized by (29), is given by
=
(1, 2) | L < 1 < L, 29
R < 2