Embed Size (px)
Citation preview

POLITECHNIKA GDAŃSKA Wydział Elektrotechniki i Automatyki
Katedra Energoelektroniki i Maszyn Elektrycznych
LABORATORIUM
S Y S T E M Y E L E K T R O M E C H A N I C Z N E
TEMATYKA ĆWICZENIA MASZYNA SYNCHRONICZNA BADANIE PRACY W SYSTEMIE ELEKTROENERGETYCZNYM Synchronizacja i sterowanie rozpływem mocy biernej Materiały pomocnicze Kierunek Elektrotechnika Studia niestacjonarne 2-giego stopnia semestr 1
Opracował Mieczysław Ronkowski Grzegorz Kostro Michał Michna Andrzej Wilk Marek Kamiński
Gdańsk 2011-2012

2
Mieczysław Ronkowski Grzegorz Kostro Michał Michna Andrzej Wilk Marek Kamiński
MASZYNA SYNCHRONICZNA
BADANIE PRACY W SYSTEMIE ELEKTROENERGETYCZNYM
1 Wprowadzenie
1.1 Model maszyny synchronicznej Maszyna synchroniczna jest przetwornikiem elektromechanicznym (rys. 1.1) o trzech wrotach przepływu mocy, które fizycznie reprezentują: zaciski uzwojenia twornika „a”, zaciski uzwojenia wzbudzenia „f” i koniec wału (sprzęgło) „m”. Moc mechaniczna (dostarczana/obierana) Pm i moc elektryczna (odbierana/dostarczana) Pa ulegają przemianie elektromechanicznej za pośrednictwem pola magnetycznego – pola wytwarzanego uzwojeniem wzbudzenia. Energia pola magnetycznego jest energią wewnętrzną maszyny, gdyż przetwornik nie ma możliwości wymiany tej energii z otoczeniem.
Tm
rm
Pa
Pf
Pm
a
f
mUa
IaUf
If
Pa
Pf Pm
Qa
Qa
a
f
m
Rys. 1.1 Maszyna synchroniczna (praca prądnicowa) – trójwrotowy przetwornik elektromechaniczny: przepływ energii/mocy wg konwencji grafów wiązań;
wrota układu mechanicznego „m” – dopływ energii mechanicznej przetwarzanej ma energię elektryczną, wrota (zaciski) obwodu twornika „a” – odpływ energii elektrycznej, wrota obwodu magneśnicy (wzbudzenia) „f” – dopływ energii
wzbudzenia
Układ elektromechaniczny na rys. 1.2 przedstawia schematycznie uproszczoną strukturę elektromechaniczną 3‐fazowej MS o wydatnobiegunowym wirniku wraz z ilustracją zasady jej działania.
Uzwojenia twornika MS jest 3‐fazowe i równomiernie rozmieszczone w żłobkach stojana. Osie magnetyczne poszczególnych faz są względem siebie odpowiednio przesunięte w przestrzeni o kąt

3
1200 (dla MS o liczbie par biegunów p>1 kąt przesunięcia osi magnetycznych wynosi 120o/p). Uzwojenie wzbudzenia umieszczone jest na wirniku a jego osie magnetyczne d i q przesunięte są względem siebie o kąt 900 (dla MS o liczbie par biegunów p>1 kąt przesunięcia osi wynosi 90o/p).
Aby zachować czytelność rysunku, układ uzwojeń fazowych (pasm) maszyny zaznaczono szkicowo na rys. 1.2 obwodami a‐a', b‐b' oraz c‐c'. Przy czym, litery a, b oraz c oznaczają umowne początki uzwojeń (pasm), a litery a', b' oraz c’ — umowne końce tych uzwojeń1. Analogiczny sposób wyróżniania umownych początków i końców uzwojeń przyjęto dla wirnika (wzbudnika), odpowiednio f oraz f’.
a)
© Mieczysław RONKOWSKI 10
MS: PRACA PRĄDNICOWASTAN JAŁOWY
MS: PRACA PRĄDNICOWASTAN JAŁOWY
)( fff IΦΦ =
rmΩE ~0
fE Φ~0
Wirujący strumień Φf wzbudnikaindukuje SEM rotacji E0a, E0b, E0cw 3-fazowym uzwojeniu twornika
azE ~0
b)
© Mieczysław RONKOWSKI
MS: PRACA PRĄDNICOWASTAN OBCIĄŻENIA CZYNNO-BIERNEGO
MS: PRACA PRĄDNICOWASTAN OBCIĄŻENIA CZYNNO-BIERNEGO
+
Pole wzbudzenia Θfwyprzedza („ciągnie”)
pole twornika Θa – efektem jestgeneracja momentu
elektromagnetycznego Te -momentu obciążającego silnik/turbinę napędową!
Pola twornika Θa i wzbudzenia Θfwirują synchronicznie!
Warunek generacji użytecznej mocy elektrycznej!
Kąt γ - kąt momentu elektromagnetycznego.
Rys. 1.2 Elementarna maszyna synchroniczna – budowa i ilustracja zasady działania: ruch synchroniczny wirującego pola magnetycznego magneśnicy Θf. i twornika Θa.
Uzwojenie wzbudzenia f ‐ f’, zasilane prądem stałym, wzbudza pole magnetyczne — reprezentowane przez przepływ Θf
2. Pole wzbudnika jest nieruchome względem układu elektromagnetycznego
wirnika, ale ze względu na ruch obrotowy wirnika (wymuszony maszyną napędową) jest polem wirującym względem uzwojenia twornika (stojana).
Wyznaczenie modelu MS ograniczymy do przypadku maszyny w wirnikiem cylindrycznym – wirnikiem symetrycznym magnetycznie: reluktancja magnetyczna dla strumienia pola twornika jest praktyczne taka sama w osi q oraz osi d magneśnicy. Oznacza to, że dalsze rozważania będę dotyczyły turbogeneratora.
Wirujący strumień wzbudnika Φf indukuje SEM rotacji E0 w poszczególnych fazach uzwojenia
twornika. Załączenie obciążenia na zaciski twornika wymusza przepływ prądów 3‐fazowych (Iaa, Iab,
1 Przyjmujemy następującą konwencję: jeżeli wartość prądu twornika danej fazy uzwojenia jest dodatnia, to wtedy prąd dopływa do umownego początku tej fazy (widzimy ogon strzałki – znak „+”) a wypływa z umownego
końca tej faz (widzimy grot strzałki – znak „.”)
2 Przepływ i strumień jest wielkością skalarną, gdyż jest wielkością pola magnetycznego. W naszych rozważaniach przyjmujemy reprezentację wektorową dla tych wielkości fizykalnych pola magnetycznego, ale w aspekcie czysto matematycznym – nie fizykalnym. Zastosowanie aparatu wektorowego ułatwi nam wyznaczanie wielkości wypadkowych pola maszyny synchronicznej, szczególnie w jej szczelinie roboczej.

4
Iac) w uzwojeniach, które wzbudzają pole magnetyczne reprezentowane przez przepływ Θa. Pole
twornika (skutek) oddziaływuje na pole magneśnicy (przyczynę) – zjawisko to nazywamy oddziaływaniem/reakcją twornika. Zjawisko to jest charakterystyczne dla MS i ma istotny wpływ na charakterystyki ruchowe maszyny. Stąd ważne jest zrozumienie aspektów fizycznych – relacji przestrzenno‐czasowych – tego zjawiska dla różnych stanów obciążenia/pracy MS.
Dla stanu obciążenia maszyny wektory obu przepływów zmieniają położenie względem siebie – położenie zależy od charakteru obciążenia (przykładowe położenie ilustruje rys. 1.2b). Powstaje pewien przepływ wypadkowy w maszynie, który jest warunkiem wytwarzania użytecznego momentu obrotowego – elektromechanicznego przetwarzania energii.
Miarą wzajemnego położenia wektorów Θf i Θa jest kąt γ – nazywanym kątem momentu, gdyż
moment elektromagnetyczny jest funkcją tego kąta. Dla pewnych wartości charakterystycznych tego kąta 0=γ lub πγ = : moment elektromagnetyczny jest równy zero: płyną prądy w uzwojeniach
maszyny a maszyna nie generuje momentu obrotowego. Cecha ta jest szczególna dla maszyny synchronicznej3.
Wzbudzanie wirującego przepływu pola twornika w MS związane jest z metodą elektromagnetyczną wzbudzania pola wirującego przez nieruchome uzwojenie wielofazowe. Warunki wytwarzania pola wirującego, w szczególności pola kołowego, i związane z tym zależności analityczne podajemy w załączniku do e‐skryptu.
Uwaga: Zasadą pracy ustalonej maszyny synchronicznej jest ruch synchroniczny pola twornika Θa i
pola wzbudnika/magneśnicy Θf ‐ ruch synchroniczny obu pól oznacza, że oba pola są
nieruchome względem siebie. Wzajemne położenie pól (wektorów pól) zależy od charakteru pracy MS (prądnica lub silnik) oraz od charakteru obciążenia (czynne, czynno‐indukcyjne, czynno‐pojemnościowe). Ruch synchroniczny oba pól jest warunkiem generacji użytecznej mocy elektrycznej – użytecznego momentu elektromagnetycznego.
Prędkość obrotowa wirnika określa częstotliwość napięcia na zaciskach twornika:
π
Ωπ
Ω22
rmre pf == (1.1)
60
se
npf = (1.2)
gdzie:
rmΩ ‐ prędkość kątowa mechaniczna wirnika (nazywana także prędkością synchroniczną –
oznaczoną zwykle symbolem sΩ ) [rad mechaniczne/s];
3 Do wyjaśnienia tego efektu można się posłużyć następującym analogiem: układem dwóch magnesów trwałych umieszczonych koncentrycznie względem siebie. Naturalnym stanem układu jest stan, kiedy osie magnetyczne obu magnesów się pokryją: nastąpi sparowanie biegunów – S (stojan)‐N (wirnik) oraz N (stojan)‐S (wirnik). Efektem przesunięcia osi magnetycznych jest generacja momentu – moment jest przeciwnie skierowany do wzrostu kąta γ−~eT . Analogiem mechanicznym jest wirnik połączony z sprężyną spiralną.

5
rΩ ‐ prędkość kątowa elektryczna wirnika [rad elektryczne/s]4;
rmr pΩΩ =
sn ‐ prędkość obrotowa mechaniczna wirnika (nazywana jest także prędkością
synchroniczną) [obr/min]; p – liczba par biegunów. Na podstawie prawa Faraday’a wyznaczamy zależności na SEM E0 indukowaną strumieniem wirujący magneśnicy. Zależność na SEM E0 indukowaną (wartość skuteczna) jest następująca:
uaaef kzfE 44,40 Φ= (1.3)
gdzie: za – liczba zwojów na fazę uzwojenia twornika; kua – współczynnik uzwojenia twornika (uwzględnia równomierne rozłożenie uzwojenia w żłobkach stojana – średnia wartość kua = 0,96). Zależność (1.3) jest analogiczna do zależności na SEM dla transformatora (z pominięciem współczynnika kua) – podobieństwo jest czysto formalne. Zauważmy, że w zależności dla transformatora wielkość fe to częstotliwość ruchu elektrycznego, natomiast w przypadku MS ‐ fe to częstotliwość zależna od ruchu mechanicznego (wzór (1.1)).
1.2 Praca generatorowa w systemie elektroenergetycznym Schemat blokowy na rys. 1.3 ilustruje MS pracującą w systemie elektroenergetycznym (SE).
Włączenie MS do SE wymaga przeprowadzenia synchronizacji maszyny z siecią systemu. Interesują nas następujące charakterystyki ruchowe MS pracującej w SE:
• rozpływu mocy czynnej i biernej,
• kątowa
przy fe = fs oraz Ωrm = Ωs.
Do wyznaczenia powyższych charakterystyk posłużymy się odpowiednimi wykresami wektorowymi sporządzonym w oparciu o model obwodowy MS.
1.2.1 Synchronizacja z siecią systemu Warunki synchronizacji:
1. kolejność faz napięć prądnicy i sieci musi być taka sama,
2. wartości skuteczne napięć sieci i prądnicy powinny być jednakowe,
3. częstotliwość napięć prądnicy i sieci musi być jednakowa,
4. odpowiadające sobie napięcia prądnicy i sieci (napięcia na tych samych biegunach wyłącznika) powinny być ze sobą w fazie.
4 Szybkość zmiany kąta w radianach elektrycznych jest p razy większa niż zmiany kąta w radianach
mechanicznych ( rmr pθθ = – w przypadku maszyny z liczbą par biegunów p = 1 oba kąty są równe).

6
a)
© Mieczysław RONKOWSKI 1
MS: PRACA PRĄDNICOWA W SEMS: PRACA PRĄDNICOWA W SEMoc znamionowa prądnicy << moc znamionowa prądnicy zastępczej (systemu energetycznego)
San << Szn
fe = fs Ωrm = Ωs
Ωs = 2π fs/p
b)
Ua
Ia
UsE0
f = f (If )
Xs
E0 = 4,44 f za kua fe
SE
Pm = Tm rm
Źródło EM WIRNIK
TWORNIK
PaPm
Qa
a
a’
Rys. 1.3 Praca generatorowa w systemie energetycznym: a) schemat blokowy, b) model obwodowy
© Mieczysław RONKOWSKI 3
MS: PRACA PRĄDNICOWA NA SIEĆ SZTYWNĄ
WYKRES WSKAZOWYCZASOWY
PRACA MS PO IDEALNEJ SYNCHRONIZACJI
Ia = 000 =− sUE
WYSTĘPUJĄ DWA ŹRÓDŁA NAPIĘCIA:SIEĆ – UsMS – Eo
Rys. 1.4 MS po przeprowadzeniu idealnej synchronizacji ‐ wykres wskazowy (czasowy)

7
Występują dwa źródła napięcia: sieć – Us i MS – Eo przy 00 =− sUE oznacza, że Ia = 0 Ilustruje to
wykres wskazowy na rys. 1.4.
1 2
3 4
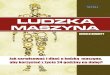
Rys. 1.5 Metoda synchronizacji: 1) i 2) układ żarówek ze światłem pulsującym, 3) i 4) układ żarówek ze światłem
wirującym [9]
Na rys. 1.5 przedstawiono metodę synchronizacji z układem żarówek ze światłem wirującym i pulsującym.
1.2.2 Stan obciążenia – charakterystyki ruchowe (regulacja mocy czynnej i biernej) W zależności od charakteru momentu zewnętrznego Tm (napędzający albo hamujący) oraz od wartości prądu wzbudzenia If MS może pracować jako prądnica/silnik przewzbudzony lub niedowzbudzony (rys. 1.6).

8
© Mieczysław RONKOWSKI 8
MS: PRACA NA SIEĆ SZTYWNĄ
Praca silnikowa (ćwiartka I i II); praca prądnicowa (ćwiartka III i IV).
W zależności od charakteru momentu zewnętrznego Tm(napędzający albo hamujący) oraz od wartości prądu wzbudzenia If
MS może pracować jako prądnica/silnik przewzbudzony lub niedowzbudzony.
Rys. 1.6 Praca silnikowa (ćwiartka I i II); praca prądnicowa (ćwiartka III i IV).
Na rys. 1.7 przedstawiono wykresy fazorowe pracy MS przy Pe = const. Te = const.
a)
© Mieczysław RONKOWSKI 9
MS: PRACA PRĄDNICOWA NA SIEĆ SZTYWNĄ
WYKRES WSKAZOWYCZASOWO-PRZESTRZENNY
PRACA PRZY Pe = const.Te = const.
Te ≅ Tm = const. !
Pe ≅ Pm = const. !
Pa ≅ Pe = const. !

9
b)
© Mieczysław RONKOWSKI 10
MS: PRACA PRĄDNICOWA NA SIEĆ SZTYWNĄ
WYKRES WSKAZOWYCZASOWO-PRZESTRZENNY
PRACA PRZY Pe = const.Te = const.
Te ≅ Tm = const. !
Pe ≅ Pm = const. !
Pa ≅ Pe = const. !
Rys. 1.7 Wykresy fazorowe czasowo‐przestrzenne. Praca przy Pe = const. Te = const.
a) wykreślenie położenia linii stałej mocy czynnej, b) kompletny wykres fazorowy czasowo‐przestrzenny
Interesującymi charakterystykami ruchowymi MS są:
• charakterystyka kątowa – zależność )(δee PP = lub )(δee TT = ,
• charakterystyka „V” (krzywe Mordey’a) – zależność Ia = Ia (If) przy Pe = const.
gdzie, δ – kąt mocy MS.
Równanie momentu elektromagnetycznego – charakterystyki kątowej opisuje następująca zależność:
δΩ
sin
ss
se X
EUmT 0−= (1.4)
Dla małych kątów δ [rad] zachodzi δδ ≅sin , zatem δ−~eT . O takim momencie mówimy, że jest
typu synchronicznego5.
Pomijając straty mechaniczne ‐ moc czynna ≅ moc na wale – mamy
Pa ≅ Pe ≅ Pm (1.5)
δsin
0
s
sm X
EUmP −= (1.6)
Charakterystykę kontową maszyny w zakresie ‐180o < δmax < 180o przedstawiono na rys. 1.8.
5 W przypadku silnika prądu stałego, ze względu na zależność afTe I ΦkT = , zatem ae IT ~ ‐ mówimy, że
jest to momentem typu magnetoelektrycznego.

10
© Mieczysław RONKOWSKI 11
MS: CHARAKTERYSTYKA KĄTOWA
-90o < δmax < 90o
Rys. 1.8 Charakterystyka kątowa maszyny synchronicznej: wyznaczona przy różnych wartościach prądu wzbudzenia
Charakterystyki „V” Ia = Ia (If) przy Pa = const. przedstawiamy na rys.1.9.
© Mieczysław RONKOWSKI 12
MS: PRACA PRĄDNICOWA NA SIEĆ SZTYWNĄ
Charakterystyki „V”Ia = Ia (If) przy Pa = const.
Rys.1.9 Charakterystyki „V” wyznaczone przy różnych wartościach mocy Pa

11
2. BADANIA
2.1. Oględziny zewnętrzne Należy dokonać oględzin badanej maszyny synchronicznej oraz urządzeń wchodzących w skład
układu napędowego. Przede wszystkim należy dokładnie przeczytać i wynotować dane zawarte na tabliczce znamionowej maszyn.
Tablica 1 Dane znamionowe maszyny synchronicznej
Lp. Dane znamionowe maszyny synchronicznej Jednostka Wartość
1 nazwę lub znak producenta
2 nazwę i typ
3 numer fabryczny
4 rok wykonania
5 moc znamionową kVA
6 znamionowe napięcia V
7 znamionowy prąd stojana A
8 znamionowy współczynnik mocy 1) ‐
9 układ połączeń uzwojeń stojana 2) ‐
10 znamionowe napięcie wzbudzenia V
11 znamionowy prąd wzbudzenia A
12 prędkość (lub częstotliwość) obr/min
13 klasa izolacji
14 warunki pracy niesymetrycznej (I2/IN)
15 stopień ochrony

12
2.2. Synchronizacja Układ do synchronizacji przedstawiono na rys. 2.1.
220V~
Kolumna synchronizacyjna
A
FS2
V
Hz
1
4
2
3
U1
U2
V1
V2
W1
W2
F1 F2
V
V Hz
K4
Q1
Q2
A
G3~
V PW
3x380V ~SIEĆ
SPS
Pm
Synchronizacja-schemat_Kaminski_MR.vsd
Pe
Rys.2.1 Układ do synchronizacji maszyny synchronicznej z siecią sztywną
Przykładowe wyniki pomiarów stanu przejściowego procesu synchronizacji maszyny synchronicznej z siecią sztywną przedstawia rys. 2.2.

13
Rys.2.2 Wyniki pomiarów stanu przejściowego procesu synchronizacji maszyny synchronicznej z siecią sztywną

14
2.3. Wyznaczenie krzywych Mordey’a Po dokonaniu synchronizacji generatora z siecią pomierzyć charakterystyki :
Ia = Ia (If) przy Pe = const. Us = const. Ωs =const
Wykonać kilka pomiarów zapisując wyniki w tablicy 2.1. Należy zmniejszyć do zera prąd wzbudzenia generatora będącego w stanie jałowym, a następnie wykonać pomiary przy zwiększanym prądzie wzbudzenia do wartości If = IfN. Po wykonaniu pomiarów zwiększyć oddawaną przez generator moc czynną do wartości Pe = 0,5 PN. Pomiary powtórzyć przy mocy czynnej Pe = PN.
Tablica 2.1
Lp. Pomiary Obliczenia
Ia [A] If [A] Pα [W] Pβ [W] Pe [A] cos ϕ
2.4. Zadania Opracować wyniki pomiarów i przeprowadzić ich dyskusję.
2.5. Literatura 1. Latek W.: Zarys maszyn elektrycznych. WNT, W‐wa 1974. 2. Latek W.: Badania maszyn elektrycznych w przemyśle. WNT, W‐wa 1979. 3. Manitius Z.: Maszyny synchroniczne. Skrypt. Wyd . Pol. Gdańskiej, Gdańsk 1977. 4. Manitius Z.: Maszyny Elektryczne. Cz.I. Skrypt. Wyd. Pol. Gdańskiej, Gdańsk 1977. 5. Plamitzer A.: Maszyny elektryczne. Wyd. 7. WNT, W‐wa 1992. 6. Praca zbiorowa (red. Manitius Z.): Laboratorium maszyn elektrycznych. Skrypt. Wyd.2. Wyd.
Pol. Gdańskiej, Gdańsk 1990. 7. Roszczyk S.: Teoria maszyn elektrycznych. WNT, W‐wa 1979. 8. Staszewski P., Urbański W.: Zagadnienia obliczeniowe w eksploatacji maszyn elektrycznych,
Warszawa, Oficyna Wydawnicza Politechniki Warszawskiej 2009. 9. Interactive and Unified E‐Based Education and Training for Electrical Engineering. INETELE.
Project Leonardo da Vinci No: CZ/02/B/F/PP/134009, 2002 ‐ 2005. Boboń A., Kudła J., Miksiewicz R.: Maszyny elektryczne prądu przemiennego (asynchroniczne i synchroniczne). Multimedialny podręcznik elektroniczny wchodzący w skład projektu INETELE (www.tuke.sk/inetele/)
10. PN‐IEC 34‐1:1997 Maszyny elektryczne wirujące. Ogólne wymagania i badania: http://www.pkn.pl/

15