Embed Size (px)
Citation preview
PID e Lugar das Raızes
1. Controlador PID
2. Minorsky (1922), “Directional stability of automatically steered bodies”,
Journal of the American Society of Naval Engineers, Vol. 34, pp. 284 –
Pilotagem de navios
3. Exemplo de projeto PID utilizando o LR
c©Reinaldo M. Palharespag.1 Controle de Sistemas Lineares – Aula 10

Controlador PID
B O controlador PID e largamente utilizado na industria. Embora tenha uma
estrutura de tres termos relativamente simples:
u(t) = KP e(t) + KD e(t) + KI
∫
e(t)dt
⇓ L
Gc(s) =U(s)
E(s)= KP + KD s +
KI
s
e muito robusto e pode ser usado tambem onde nao se conhece muito
precisamente o modelo da planta
Metodo de Ziegler-Nichols – Leia na pagina do curso o artigo: Revisitando o
Metodo de Ziegler-Nichols para Sintonia de PID...
Outros metodos ad hoc – simulacao interativa por computador ...
c©Reinaldo M. Palharespag.2 Controle de Sistemas Lineares – Aula 10

Controlador PID
B O processo de selecao do ganho PID e chamado de sintonia
Controlador Proporcional – Considerando KD = KI = 0, o PID e um
controlador proporcional que pode ser visto como um controle de“volume”
• Aumentando-o ajuda a reduzir os efeitos dos disturbios e a sensibilidade a
variacao de parametros na planta
• Porem nao rejeita completamente disturbios, e erros em estado estacionario
geralmente irao persistir
• Tambem aumentando muito o ganho pode levar o sistema em malha fechada
a instabilidade e amplificacao de ruıdos de medidas presentes no sistema
• Um ponto positivo e a sua simplicidade ...
c©Reinaldo M. Palharespag.3 Controle de Sistemas Lineares – Aula 10
Controlador PID
Controlador Integral – Considerando KD = KP = 0, o PID e um
controlador integral
• As vantagens geradas pelo controlador integral incluem reducao ou eliminacao
de erros de seguimento em estado estacionario
• Isto e fruto do fato que usando o controlador integral aumenta-se o tipo do
sistema de um... De modo que uma planta tipo 1 com um controlador integral
pode seguir uma entrada rampa com ess = 0
• Pode-se associar um controlador integral e proporcional e obter um
controlador PI
Gc(s) = Kp +KI
s
c©Reinaldo M. Palharespag.4 Controle de Sistemas Lineares – Aula 10
Controlador PID
Controlador Derivativo – Considerando KP = KI = 0, o PID e um
controlador derivativo que permite aumentar o amortecimento e“melhorar”a
estabilidade do sistema
• Normalmente o controlador derivativo e usado em conjunto com o
proporcional e/ou integral. O controlador PD e
Gc(s) = Kp + KDs
• O termo derivativo e implementado na forma KDs/(τds + 1), com
τd << τ processo, gerando um polo que possa ser desprezado
B Um projeto PID completo envolve um compromisso entre os tres parametros
a serem sintonizados
c©Reinaldo M. Palharespag.5 Controle de Sistemas Lineares – Aula 10
Controlador PID
Veja que o PID pode ser reescrito na forma
Gc(s) = KP + KD s +KI
s
=KD s2 + KP s + KI
s
= KD
s2 + KP
KD
s + KI
KD
s
= KD
(s + z1) (s + z2)
s
B K = KD; z1 + z2 = KP
KD
e z1z2 = KI
KD
...
c©Reinaldo M. Palharespag.6 Controle de Sistemas Lineares – Aula 10
Controlador PID e LR – Exemplo
Navegacao Autonoma em Rodovias Inteligentes – Controle de Velocidade
– Este exemplo e adaptado do DP7.12 (Dorf e Bishop)
B Objetivo de controle
Manter a velocidade prescrita entre dois veıculos,
e manobrar o veıculo ativo conforme comandado
B Variavel a ser controlada
Velocidade relativa entre os veıculos, denotado por y(t)
c©Reinaldo M. Palharespag.7 Controle de Sistemas Lineares – Aula 10
Controlador PID e LR – Exemplo
B Especificacoes de projeto
E1. Erro em regime nulo para uma entra degrau
E2. Erro em regime para uma entrada rampa < 25% da magnitude da entrada
E3. Mp < 5% para uma entrada degrau
E4. ta < 1.5s para uma entrada degrau (criterio de 2%)
c©Reinaldo M. Palharespag.8 Controle de Sistemas Lineares – Aula 10

Controlador PID e LR – Exemplo
B Considere realimentacao unitaria. Controlador ?
B Planta: sistema automotivo
G(s) =1
(s + 2)(s + 8)
O que fazer com as especificacoes ?
E1 – Tipo do sistema G(s) ? Tipo 0. Logo o controlador deve“crescer”o tipo
do sistema para ao menos 1, a fim de que ess = 0 para entrada degrau e
ess < ∞ para entrada rampa
c©Reinaldo M. Palharespag.9 Controle de Sistemas Lineares – Aula 10

Controlador PID e LR – Exemplo
E2 – Para satisfaze-la, analise a constante de velocidade
Kv = lims→0
sGc(s)G(s) ≥1
0.25= 4
(
ess =1
Kv
⇒ Kv =1
0.25
)
E3 – A especificacao de sobre-elevacao implica
Mp ≤ 5% ⇒ ζ ≥ 0.69
E4 – Da especificacao de tempo de acomodacao
ta ≈4
ζωn
≤ 1.5 ⇒ ζωn ≥ 2.66
c©Reinaldo M. Palharespag.10 Controle de Sistemas Lineares – Aula 10
Controlador PID e LR – Exemplo
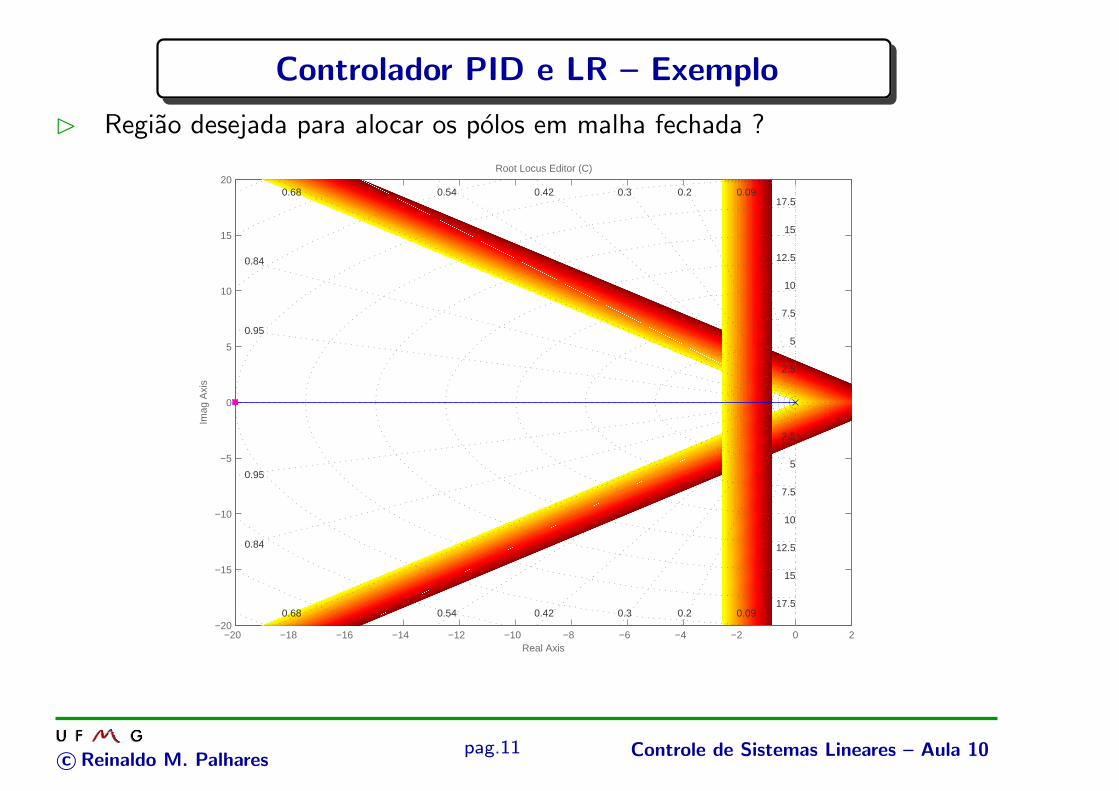
B Regiao desejada para alocar os polos em malha fechada ?
−20 −18 −16 −14 −12 −10 −8 −6 −4 −2 0 2−20
−15
−10
−5
0
5
10
15
20
10
7.5
5
2.5
0.54
0.09
15
0.84
20
0.3
10
12.5
0.42
15
0.68
17.5
20
0.54 0.20.68 0.42
0.95
5
0.84
2.5
7.5
0.09
12.5
0.217.5
0.3
0.95
Real Axis
Root Locus Editor (C)
Imag
Axi
s
c©Reinaldo M. Palharespag.11 Controle de Sistemas Lineares – Aula 10

Controlador PID e LR – Exemplo
B Polos da planta ?
−10 −8 −6 −4 −2 0 2−10
−8
−6
−4
−2
0
2
4
6
8
10
2
10
8
6
0.220.72
0.22
0.44
4
0.962
0.44
0.96
0.1
0.86
10
0.58
4
0.86
6
0.10.72 0.32
8
0.58
0.32
Real Axis
Root Locus Editor (C)
Imag
Axi
s
c©Reinaldo M. Palharespag.12 Controle de Sistemas Lineares – Aula 10
Controlador PID e LR – Exemplo
Controlador ? Gc = K ? Infelizmente nao satisfaz as especificacoes E1 e E2,
ja que o sistema em malha fechada deve ser do tipo 1 para obter ess = 0 para
entrada degrau e ess < 0.25 para entrada rampa
Alternativa ? O controlador deve ter ao menos um polo na origem... Considere
um controlador PI
Gc(s) = KP +KI
s=
KP s + KI
s= KP
s + KI
KP
s
B Onde alocar o zero z = − KI
KP
?
B Para quais valores de Kp e KI o sistema e estavel? FT em malha fechada
T (s) =Kps + KI
s3 + 10s2 + (16 + KP )s + KI
c©Reinaldo M. Palharespag.13 Controle de Sistemas Lineares – Aula 10
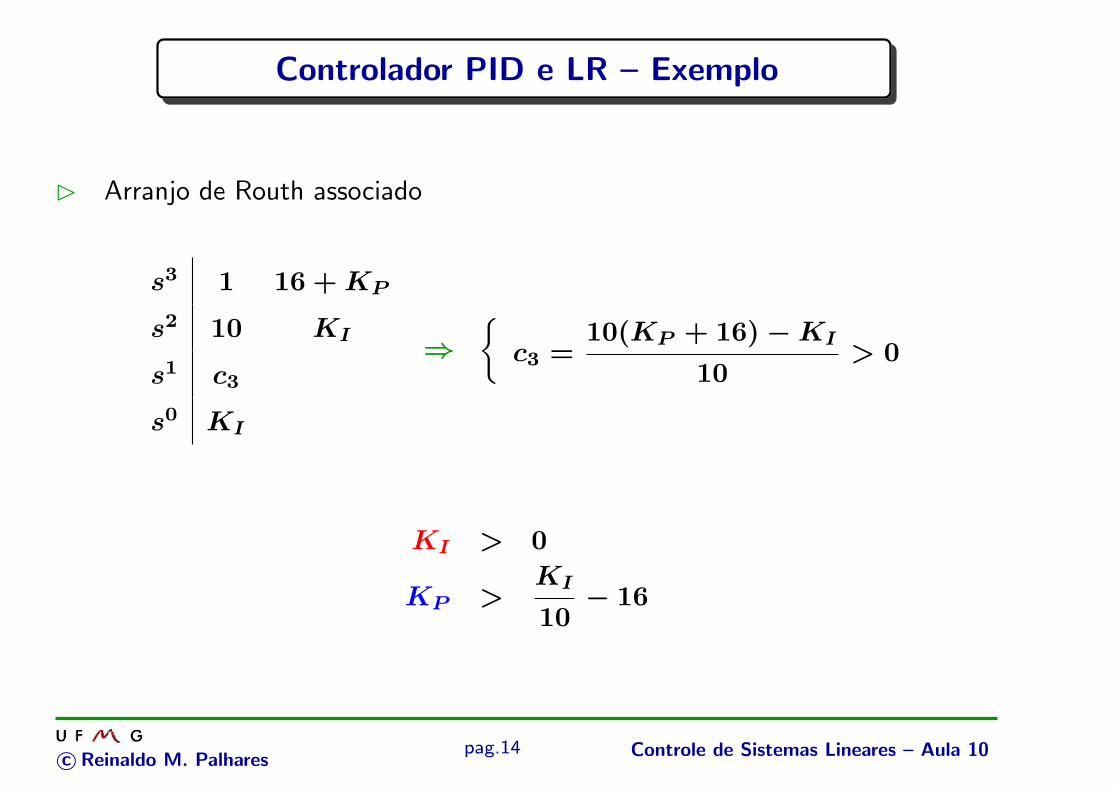
Controlador PID e LR – Exemplo
B Arranjo de Routh associado
s3 1 16 + KP
s2 10 KI
s1 c3
s0 KI
⇒
{
c3 =10(KP + 16) − KI
10> 0
KI > 0
KP >KI
10− 16
c©Reinaldo M. Palharespag.14 Controle de Sistemas Lineares – Aula 10

Controlador PID e LR – Exemplo
B Da especificacao E2 obtem-se
Kv = lims→0
sGc(s)G(s)
= lims→0
sKP
(
s + KI
KP
)
s
1
(s + 2)(s + 8)
=KI
16> 4
Portanto KI > 64
c©Reinaldo M. Palharespag.15 Controle de Sistemas Lineares – Aula 10

Controlador PID e LR – Exemplo
B Naturalmente como no LR havera 3 polos (s = 0, − 2, − 8) e 1 zero
(s = −KI/KP ), dois ramos seguirao para os zeros em infinito ao longo de duas
assıntotas em φ = 900 e −900 e centradas em
α =
∑
pi −∑
zi
np − nz
=−2 − 8 −
(
− KI
KP
)
3 − 1= −5 +
1
2
KI
KP
B Da restricao de tempo de acomodacao, ζωn < −2.66, entao
−5 +1
2
KI
KP
< −2.66
ou
KI
KP
<14
3= 4.66
c©Reinaldo M. Palharespag.16 Controle de Sistemas Lineares – Aula 10
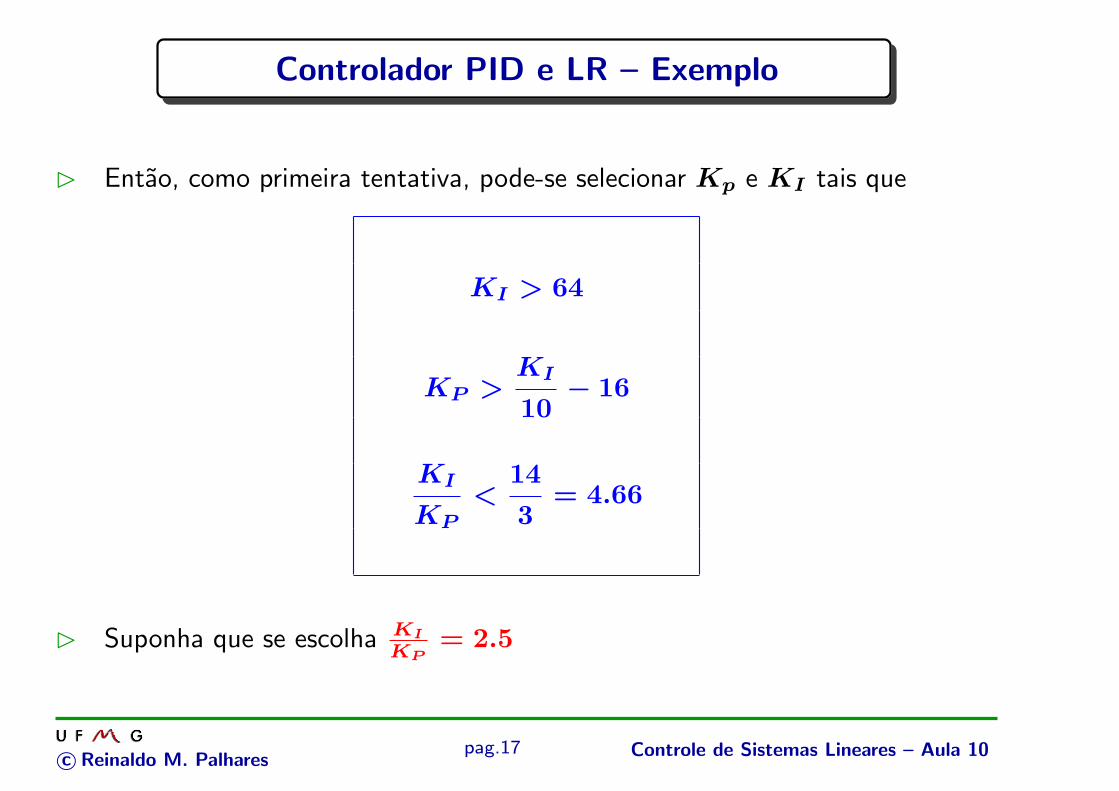
Controlador PID e LR – Exemplo
B Entao, como primeira tentativa, pode-se selecionar Kp e KI tais que
KI > 64
KP >KI
10− 16
KI
KP
<14
3= 4.66
B Suponha que se escolha KI
KP
= 2.5
c©Reinaldo M. Palharespag.17 Controle de Sistemas Lineares – Aula 10
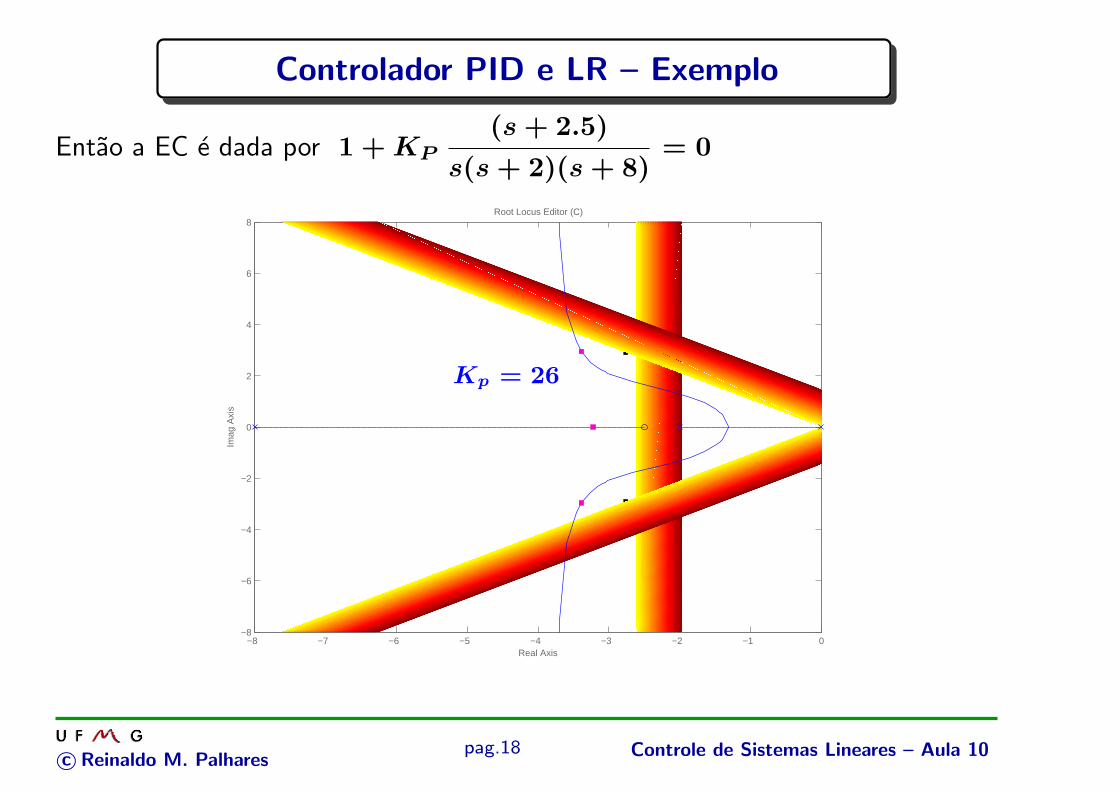
Controlador PID e LR – Exemplo
Entao a EC e dada por 1 + KP
(s + 2.5)
s(s + 2)(s + 8)= 0
−8 −7 −6 −5 −4 −3 −2 −1 0−8
−6
−4
−2
0
2
4
6
8
Real Axis
Root Locus Editor (C)
Imag
Axi
s
Kp = 26
c©Reinaldo M. Palharespag.18 Controle de Sistemas Lineares – Aula 10
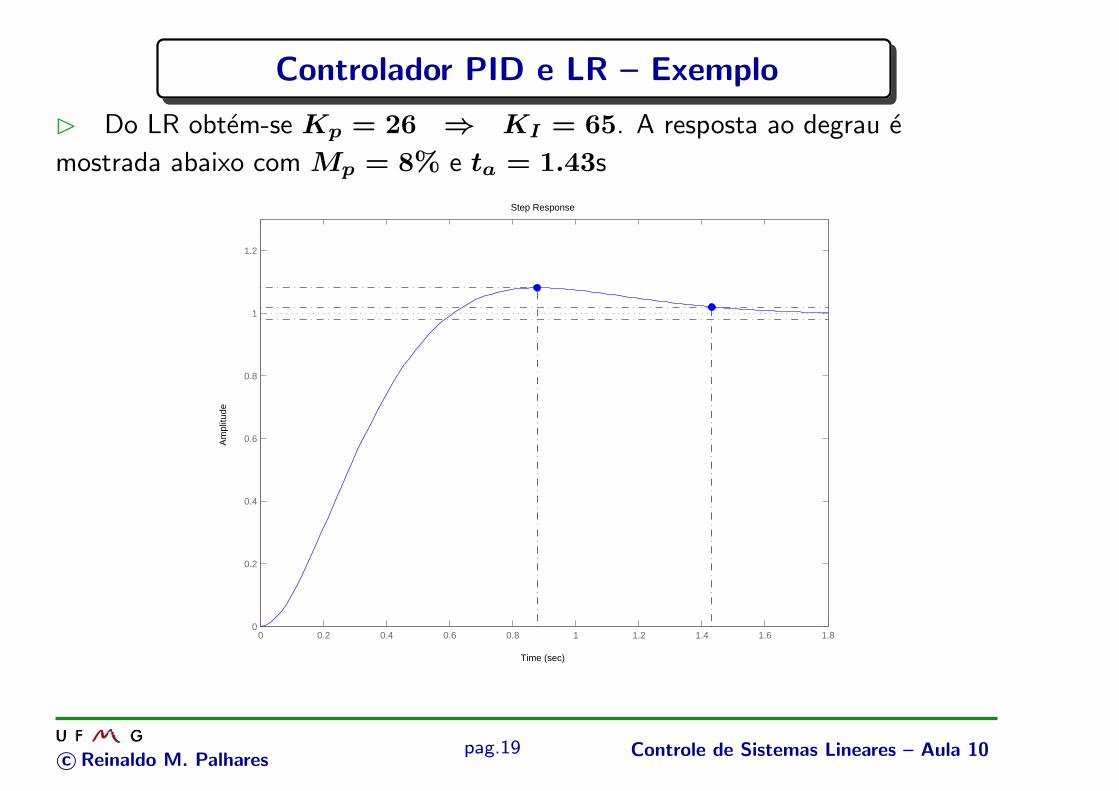
Controlador PID e LR – Exemplo
B Do LR obtem-se Kp = 26 ⇒ KI = 65. A resposta ao degrau e
mostrada abaixo com Mp = 8% e ta = 1.43s
Step Response
Time (sec)
Am
plitu
de
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
1.2
c©Reinaldo M. Palharespag.19 Controle de Sistemas Lineares – Aula 10

Controlador PID e LR – Exemplo
B Pode-se interativamente refinar o projeto, no entanto, mesmo com os polos
em malha fechada localizados sobre a regiao desejada, a resposta temporal nao
atingira as especificacoes ja que o zero do controlador influenciara a resposta.
Veja que o sistema em malha fechada e de 3a. ordem e nao tem o desempenho de
um de 2a. ordem
B Pode-se considerar mover o zero para z = −2 (escolhendo KI/KP = 2)
tal que o polo em −2 seja cancelado, resultando assim em um sistema realmente
de 2a. ordem – onde todas as especificacoes devem ser atendidas
B A estrategia anterior e relativamente facil, no entanto, deve-se ter em mente
que e valida apenas para o modelo matematico, ie, se o modelo nao representar
de forma fidedigna a planta, naturalmente nao havera o efeito desejado
c©Reinaldo M. Palharespag.20 Controle de Sistemas Lineares – Aula 10

Exercıcios
1. Considere o exemplo anterior. Projete um controlador que garanta as
especificacoes E1, E3 e E4 quando o sistema apresenta retardo no tempo, na
atuacao do controlador no processo, como descrito na figura abaixo. Suponha que
o retardo no tempo seja T = 0.25s. Alem disso considere que o retardo no
tempo possa ser aproximado por uma FT de 2a. ordem utilizando a funcao pade
(Note que a proximacao de Pade introduzira dois zeros instaveis)
1(s+2)(s+4)
Gc e−sT
R(s) Y (s)+
−
c©Reinaldo M. Palharespag.21 Controle de Sistemas Lineares – Aula 10
Exercıcios
2. O que acontece com o desempenho do sistema de controle de velocidade
projetado no exemplo se os parametros da planta mudam? A FT e dada por
G(s) =1
(s + a)(s + b)
Os valores nominais dos parametros sao a = 2 e b = 8. Considere o PI
Gc(s) = KP +KI
s= 33 +
66
s
Verifique que o controlador PI acima satisfaz todas as 4 especificacoes, E1-E4,
apresentadas no exemplo com a = 2 e b = 8. Com o controlador PI dado acima,
de quanto podem ser variados os parametros a e b tal que o sistema em malha
fechada continue estavel e garanta as especificacoes de projeto E3-E4? Ha outros
valores de KP e KI no PI tais que o sistema em malha fechada e mais robusto a
mudancas de parametros na planta? (Por robustez entende-se que o sistema
continua estavel e garante todas as especificacoes de desempenho para uma faixa
maior de a e b)
c©Reinaldo M. Palharespag.22 Controle de Sistemas Lineares – Aula 10





























