Embed Size (px)
DESCRIPTION
riset operasi
Citation preview

PENELITIAN OPERASI MILITER
Chapter 3 : Simulasi Sistem Militer
3.1 Sistem, Model dan Simulasi
Sebuah sistem didefinisikan sebagai agregasi atau kumpulan atau benda yang berinteraksi untuk mencapai serangkaian tujuan. Komponen terkecil yang terpisahkan dari sistem ini disebut entitas. Variabel yang terkait dengan entitas yang menentukan keadaan ini disebut atribut. Kejadian sesaat yang mengubah negara atau sistem ini disebut sebuah peristiwa, Misalnya, sebuah kapal dilengkapi dengan senjata pertahanan udara dan sensor yang merupakan sistem pertahanan udara angkatan laut: rudal dipasang pada kapal, entitas adalah: probabilitas dari membunuh, jangkauan dan kecepatan, atribut adalah: deteksi, akuisisi, menembak dan membunuh.
Jika hasil dari suatu peristiwa dijelaskan dengan pasti, dalam hal ini himpunan input disebut peristiwa deterministik. Jika hasil suatu peristiwa digambarkan dalam hal probabilitas dalam satu set input maka disebut peristiwa stokastik. Sebuah sistem juga dapat diklasifikasikan sebagai diskrit atau kontinyu. Dalam sistem diskrit, perubahan terjadi pada titik waktu yang berbeda: misalnya, workshop militer adalah sistem diskrit sejak kedatangan dan keberangkatan kendaraan berlangsung pada saat poin diskrit. Di sisi lain, dalam sistem kontinyu perubahan terjadi terus menerus. Sebagai contoh, seorang pejuang pertahanan udara mengejar pesawat musuh tempur merupakan sistem kontinyu pada saat posisi mereka berubah secara terus menerus. Ini mungkin menjelaskan bahwa kedua jenis perubahan, yaitu, diskrit dan kontinyu, umumnya terjadi secara bersamaan dalam suatu sistem. Dalam prakteknya, satu jenis perubahan mendominasi atas yang lain dan atas dasar ini, sistem diklasifikasikan sebagai diskrit atau kontinyu.
Karena kompleksitas dalam sistem pertahanan, hal itu mungkin tidak memungkinkan untuk bereksperimen pada sistem itu sendiri. Dan juga membangun sejumlah prototipe dan menguji mereka sangat mahal dan memakan waktu. Akibatnya, studi sistem dilakukan pada model dari sistem yang merupakan representasi abstrak dari sistem fisik, situasi atau fenomena. Untuk kebanyakan studi, hal itu mungkin tidak diperlukan, bahkan jika memungkinkan tidak perlu dipertimbangkan dalam sistem. Oleh karena itu model ini juga dapat didefinisikan sebagai representasi yang disederhanakan dari sistem dengan informasi terkait saja. Dalam model OR hubungan antara berbagai variabel yang mempengaruhi perilaku sistem dan output biasanya dinyatakan dalam bentuk simbolis. Analis mencoba untuk menjaga model sederhana sehingga solusi analitis dimungkinkan. Dalam sebuah solusi analitis, output yang diinginkan dinyatakan sebagai fungsi eksplisit dari variabel input. Persyaratan untuk mengembangkan model ini dekat dengan sistem kehidupan nyata serta menerima dengan baik solusi analitis sederhana yang mungkin tidak selalu memungkinkan. Dan juga, ada situasi di mana solusi analitik tidak disukai untuk analisis lebih lanjut. Sebagai contoh, solusi analitis dapat menyebabkan seri terbatas atau integral kompleks. Dalam kasus tersebut, itu akan lebih baik untuk menggunakan pendekatan eksperimental, yaitu simulasi, untuk menentukan bentuk solusi.
Kebanyakan sistem simulasi diatur oleh peristiwa probabilistik. Pertama, perlu mekanisme untuk menghasilkan sampel dari populasi dengan distribusi probabilitas yang diberikan. Untuk tujuan ini, seperti yang akan dijelaskan nanti dalam Bagian 3.2, kita memerlukan satu set nomor acak. Kita
dapat menggunakan sejumlah besar nomor yang benar-benar acak, penggunaan awal dengan menggunakan perangkat yang ada (misalnya, roda rolet) dan menyimpannya ke dalam memori komputer. Namun, karena keterbatasan perangkat, kesempatan mekanik dan permintaan yang berlebihan terhadap memory komputer agar dapat diakses secara on-line dimana semua itu terlibat dalam metode ini, kompromi dibuat dengan persyaratan mudah dengan nomor yang benar-benar acak. Kita menerima bukan 'pseudo-acak nomor' yang dihasilkan oleh komputer dari algoritma deterministik. Metode menghasilkan sampel atau nilai-nilai untuk variabel berikut yang distribusinya ditentukan oleh prosedur pengambilan sampel Monte Carlo, yang kita bahas pada bagian berikutnya.
3.2 Monte Carlo Prosedur Sampling
Jika kita ingin menghasilkan sampel nilai untuk X variabel acak kontinyu dengan fungsi distribusi kumulatif F (x) = Prob [X ≤ x]. Kita plot F (x) (atau Fc (x) = 1-F (x)) sebagai sebuah fungsi dari x seperti ditunjukkan pada Gambar. 3.1.
Gambar 3.1 : Hasil Sample dari Variabel Acak
Kita menarik nomor acak yang merata antara 0 dan I. misalnya, dari "tabel Satu Juta Digit Acak" disiapkan oleh RAND Corporation (1965). Biarkan r1 menjadi nomor acak yang ditarik. Hal ini dapat dengan mudah menunjukkan x1 absis. penyesuaian untuk nomor acak r1, merupakan salah satu nilai sampel dari distribusi yang ditentukan. Metode ini diulang untuk mendapatkan sampel dari ukuran yang dibutuhkan.
Kita juga perlu distribusi normal angka acak yang berarti u dan deviasi standar q sering diperlukan. Ini dapat dengan mudah dihasilkan dari nomor acak untuk standart normal (diambil dari distribusi normal yang berarti p = 0 dan standar deviasi a = 1). Dengan demikian, tabel atau nomor acak untuk standar normal telah disusun, misalnya, tabel "Sejuta Digit Acak dengan 100.000 penyimpangan" yang disiapkan oleh RAND Corporation (1955).

Untuk sampel yang diambil dari sebuah distribusi diskrit, metodologi tetap sama. Misalnya, jika kita ingin menarik sampel yang probabilitas fungsi massa yang didefinisikan sebagai berikut:
P (0) = 0,6
p (l) = 0,3
p (2) = 0, l.
kita memperoleh fungsi distribusi kumulatif F (n), n = 0,1,2 sehingga f (0) = p (0) = 6, F (I) = p (0) + p (l) = 9 dan F (2) = l.0. Jika nomor acak r diambil secara seragam (distribusi antara 0 dan 1 adalah seperti 0≤r <0,6, nilai dari variabel acak diambil sebagai 0. Jika 0,6 ≤ r <0,9, nilai dari variabel acak diambil sebagai I. dan jika 0,9 ≤r <1.0, nilai dari variabel acak diambil sebagai 2.
Sistem simulasi yang melibatkan prosedur Monte Carlo, pengambilan sampel disebut Monte Carlo simulasi. Namun, pada umumnya Monte Carlo simulasi dibatasi hanya untuk simulasi di mana prosedur telah digunakan untuk mendapatkan solusi atau masalah deterministik. Bagi mereka yang menggunakan perhitungan angka acak untuk memecahkan problem stokastik, istilah yang digunakan adalah 'simulasi stokastik' .
Kita sekarang menggambarkan penggunaan Monte Carlo sampling untuk menentukan area yang rusak akibat bom atau granat.
Daerah Rusak oleh Bom atau Granat
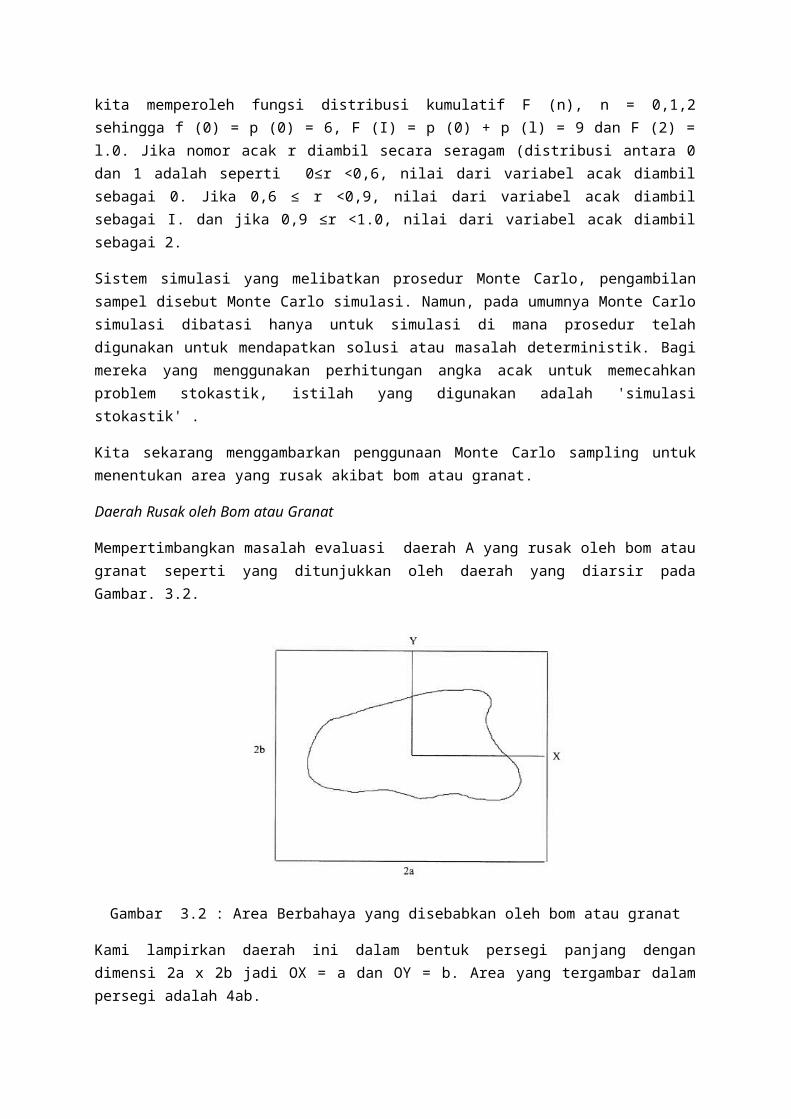
Mempertimbangkan masalah evaluasi daerah A yang rusak oleh bom atau granat seperti yang ditunjukkan oleh daerah yang diarsir pada Gambar. 3.2.
Gambar 3.2 : Area Berbahaya yang disebabkan oleh bom atau granat
Kami lampirkan daerah ini dalam bentuk persegi panjang dengan dimensi 2a x 2b jadi OX = a dan OY = b. Area yang tergambar dalam persegi adalah 4ab.
Selanjutnya kita memilih sejumlah besar (katakan n) poin (x i, yi), i = l.2, ..., n sehingga x i dan yi
adalah nomor acak yang didistribusikan secara merata antara - a dan a dan - b dan b secara berurutan . Karena jumlahnya merata dalam persegi panjang, jumlah titik per satuan luas akan menjadi n / 4AB. Jika poin n (keluar atau n) berada dalam area A, yang mungkin dihitung dengan memplot pada kertas grafik atau ditentukan melalui sebuah algoritma, kita memiliki
Jadi,
Contoh 3.1: Dua bom atau granat jatuh pada target sulit dan tumpang tindih seperti yang ditunjukkan pada gambar .3.3. O1 dan O2 adalah pusat dari lingkaran yang mewakili daerah mematikan untuk masing-masing granat. Jika radius mematikan setiap bom atau granat adalah 1 m, gunakan simulasi Monte Carlo untuk menentukan total area yang rusak oleh granat.
Dengan O sebagai asal dan yang mengatur atau sumbu OX dan OY seperti yang ditunjukkan pada gambar.3.3, kami lampirkan dua lingkaran pada persegi panjang dari daerah 4x3 = 12 sq.m. Kami kemudian menarik dua nomor acak merata antara -2 dan +2 dalam arah X dan antara -1,5 dan + 1,5 arah Y dari dua urutan bebas pada nomor acak atau dari dua kolom yang berbeda dari tabel nomor acak. Jika angka acak
Gambar 3.3 : Area Berbahaya yang disebabkan oleh dua bom atau granat
secara bersamaan didistribusikan antara 0 dan 1 dan kami ingin mendapatkan nomor acak terdistribusi secara merata antara c dan d (d> c), ini bisa dengan mudah menunjukkan bahwa nomor acak yang diinginkan diberikan oleh c + (d - c) r. Jadi kita membaca angka acak u1 dan u2 dari dua kolom yang berbeda dari tabel nomor acak dan mendapatkan x dan y seperti yang diberikan pada Tabel 3.1.
Dapat dicatat bahwa jika titik (x, y) terletak pada lingkaran 1, jarak antara titik (x y.) dan pusat O 1 (- 0,5, 0) harus kurang dari atau sama dengan radius 1 dan oleh karena itu [(x + 0.5) 2 + y2 ]1/2≤1.

Demikian pula jika titik (x, y) terletak pada lingkaran II, [(x - 0,5)2 + y2]1/2≤1. Dengan demikian kita menentukan apakah titik terletak di lingkaran I atau II dan ini diindikasikan dengan Y (Ya). Jika tidak, hal yang sama diindikasikan oleh N (No). Jadi dari 100 poin, kita menghitung jumlah poin yang terletak baik dalam lingkaran I atau II (atau keduanya). Dalam hal ini ditemukan bahwa 42 poin jatuh di dalam daerah yang rusak. Oleh karena itu area yang rusak (A) kira-kira sama dengan 12 x 42) 100 = 5.04.
Jika kita ulangi percobaan lagi, nilai daerah A tidak perlu sama seperti pada percobaan sebelumnya. kita dapat mengambil rata-rata dari sejumlah besar percobaan tersebut untuk
Tabel 3.1 : Hasil dari Simulasi yang Sedang Berlangsung
mendapatkan daerah yang rusak. Timbul pertanyaan berapa banyak percobaan harus dilakukan untuk memastikan bahwa hasil yang diperoleh terletak antara interval tertentu, yang menyebutkan ± 0,05, berkisar pada nilai rata-rata atau pada contoh, memberi tingkat kepercayaan.
Biarkan A1, A,, .... AN menjadi hasil uji N dan biarkan
menjadi tanda dan varians dari daerah masing-masing yang diperoleh setelah sampel N. Dari Hukum Bilangan Besar, berikut bahwa Z = (AN - A) / σ N (N biasanya lebih dari 30) adalah variasi normal dengan tanda nol dan standar deviasi 1 di mana = SN/√N dan A adalah tanda populasi (Area) yang akan diperkirakan. Misalkan kita ingin mengevaluasi AN sehingga | AN - Al ≤ 0,05 dengan tingkat kepercayaan 95%. Kita memilih Z sedemikian rupa sehingga daerah di bawah kurva normal standar 95%. Seperti nilai Z adalah 1.96 sehingga IAN – AI ≤ 1,96 σ N. Dengan demikian pada tingkat

kepercayaan 95% jika kita ingin bahwa nilai A dan nilai rata-rata AN tidak berbeda lebih dari 0.05. . yaitu IA - AI ≤ 0,05, kita harus memiliki IA - AI ≤ 1,96 SN /√N ≤ 0,05.
Kami terus mengulangi percobaan sampai N pada 1.96 SN√N ≤ 0,05. Ini akan memastikan bahwa nilai A yang diinginkan terletak antara AN - 1,96 SN / √N dan AN + 1 0,96 SN / √N atau antara AN - 0,05 dan AN + 0.05 dan pernyataan ini akan memiliki Tingkat 65 kepercayaan 95%.
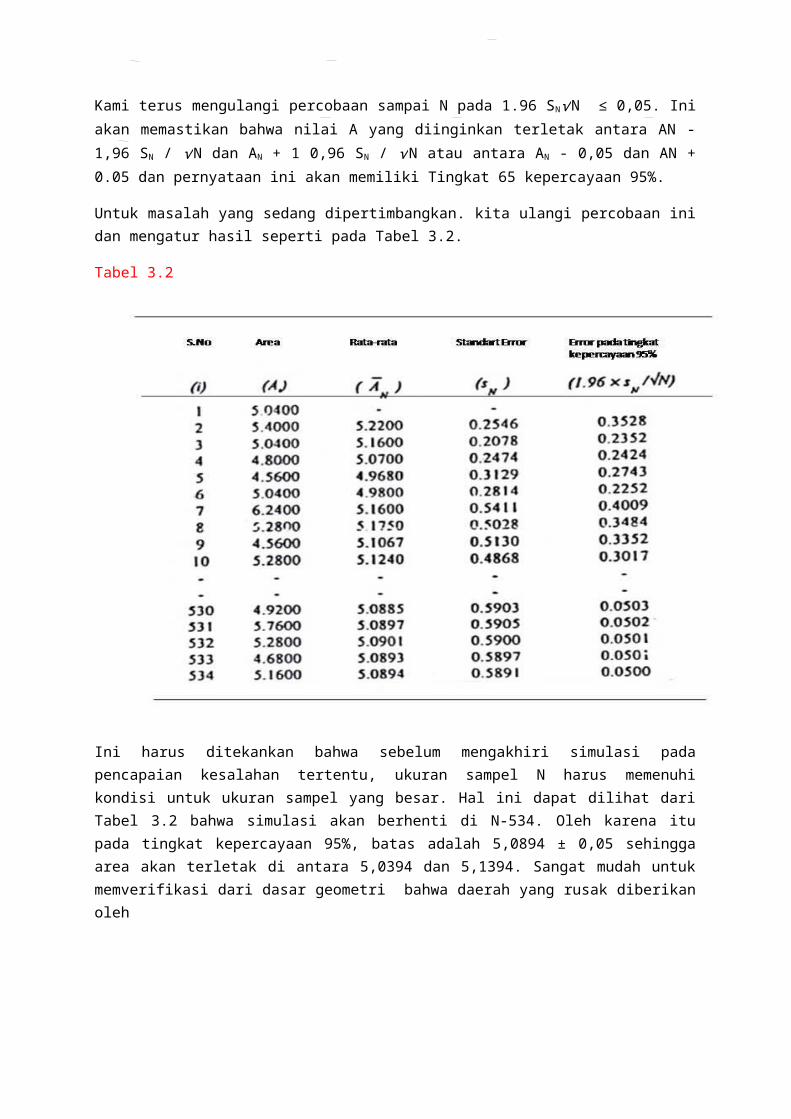
Untuk masalah yang sedang dipertimbangkan. kita ulangi percobaan ini dan mengatur hasil seperti pada Tabel 3.2.
Tabel 3.2
Ini harus ditekankan bahwa sebelum mengakhiri simulasi pada pencapaian kesalahan tertentu, ukuran sampel N harus memenuhi kondisi untuk ukuran sampel yang besar. Hal ini dapat dilihat dari Tabel 3.2 bahwa simulasi akan berhenti di N-534. Oleh karena itu pada tingkat kepercayaan 95%, batas adalah 5,0894 ± 0,05 sehingga area akan terletak di antara 5,0394 dan 5,1394. Sangat mudah untuk memverifikasi dari dasar geometri bahwa daerah yang rusak diberikan oleh

3.3 SISTEM SIMULASI KONTINYU
Berdasar terminologi konvensional, kita sebut simulasi atau Sistem kontinyu sebagai sistem simulasi kontinyu. Sejauh ini istem simulasi kontinyu selalu diperhatikan, serta dapat dicatat bahwa keadaan dari sistem bervariasi terus menerus seiring dengan waktu dan umumnya digambarkan oleh persamaan diferensial biasa atau parsial.
Sebelum pengembangan atas komputer digital, komputer analog yang digunakan untuk pelaksanaan perhitungan angka. Ini menghasilkan output yang kontinyu dan cocok untuk simulasi sistem kontinyu. Integrasi dari perangkat analog di sirkuit elektronik dengan cara yang ditentukan oleh model matematikal atau sistem yang memungkinkan sistem untuk disimulasikan. Komputer analog lebih cepat dari komputer digital karena dapat memberikan banyak persamaan dengan cara yang benar-benar simultan. Kemungkinan kerugian dari computer analog adalah akurasi yang terbatas serta perlu untuk mendedikasikan satu komputer untuk satu masalah.
Pada komputer digital, persamaan diferensial biasa atau parsial numerik dapat diselesaikan pada tahap interval yang sesuai dan penyelesaian dengan versi yang berbeda dari persamaan. Untuk rincian atau methodologi atau sistem simulasi kontinyu, acuan mungkin dibuat pada beberapa buku tentang simulasi (lihat, misalnya, Gordon 1978, Deo 1979, Morgan 1992). Kami akan menunjukkan pada Bagian 9.5 contoh simulasi sistem kontinyu untuk menirukan skenario pertempuran dengan efek spasial yang menghasilkan sebuah pengaturan yang dapat dipasangkan dengan perbedaan equasi parsial.
3.4 Sistem Simulasi Diskrit
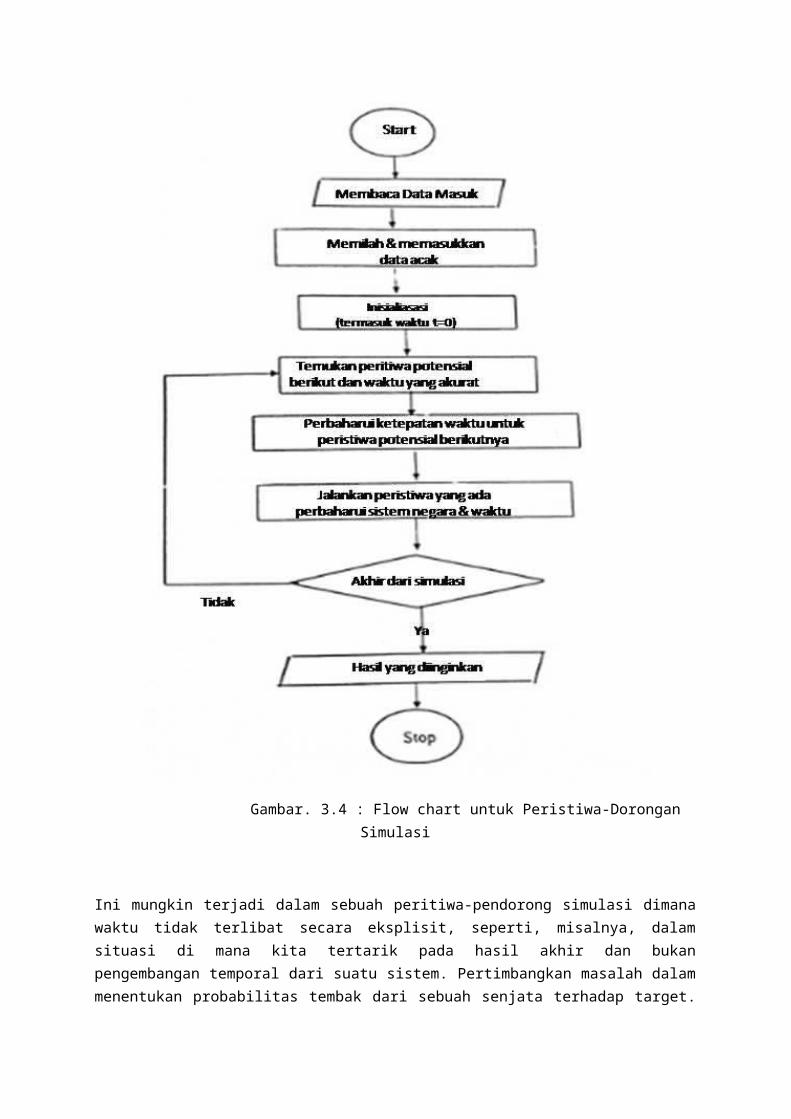
Sebagian besar sistem militer, peristiwa tidak terjadi secara terus menerus tetapi pada suatu waktu tertentu. Ini disebut sistem diskrit. Dari satu peristiwa ke peristiwa simulasi (peristiwa-pencetus simulasi) dan simulasi waktu-langkah-konstan (atau waktu-pencetus simulasi) adalah dua pendekatan untuk sistem simulasi diskrit. Sebuah pendekatan yang tepat untuk simulasi tergantung pada sifat atau interval antar-peristiwa. Simulasi berdasar pencetus peristiwa sesuai untuk interval yang tidak sama atau acak pada peristiwa yang berturut-turut (lihat Gambar. 3.4). Bertentangan dengan ini, jika interval antar-peristiwa yang sama maka pendekatan simulasi pendorong waktu akan sesuai.
Dalam peristiwa sebagai pendorong simulasi, waktu yang melompat dari satu peristiwa ke peristiwa berikutnya adalah suatu keuntungan, atau durasi yang sama dengan interval antar-peristiwa. Jika interval acak, jumlah lompatan-lompatan ditentukan dengan memilih nomor acak secara tepat. Jika negara atau sistem tidak berubah antara peristiwa berturut-turut, tidak perlu untuk
memperhitungkan waktu yang tidak aktif dalam simulasi. Dalam pendekatan ini ada jam tunggal dan peristiwa yang dijadwalkan atau terdaftar di pengaturan yang disebut daftar peristiwa bersama. Kontrol simulasi subrutin memilih dari daftar peristiwa, ini akan lebih awal karena setelah waktu yang tepat dan transfer eksekusi ke subrutin yang akan sesuai dengan peristiwa itu. Dalam subrutin ini, peristiwa lain dari jenis lain dapat dijadwalkan yang kemudian ditambahkan ke daftar peristiwa.
Gambar. 3.4 : Flow chart untuk Peristiwa-Dorongan Simulasi

Ini mungkin terjadi dalam sebuah peritiwa-pendorong simulasi dimana waktu tidak terlibat secara eksplisit, seperti, misalnya, dalam situasi di mana kita tertarik pada hasil akhir dan bukan pengembangan temporal dari suatu sistem. Pertimbangkan masalah dalam menentukan probabilitas tembak dari sebuah senjata terhadap target. 'Peristiwa' dalam model ini yaitu tembak (atau meleset) dari tembakan yang diasumsikan secara berdiri sendiri yaitu tembak atau meleset. Untuk masalah seperti itu, pengembangan waktu sedikit relevan. Kita membahas simulasi model ini secara lebih rinci pada bagian berikutnya. Kami juga mengevaluasi di sub bagian berikutnya mengenai probabilitas tank yang akan bertahan melawan serangan musuh yang diberikan dan probabilitas tembak dapat dicapai dari senjata tank dalam desain dan pengembangan yang menggunakan metodologi simulasi.
Probabilitas Tembak dari Senjata terhadap Target Circular
Mari kita berasumsi bahwa dampak atau tembakan dari senjata mengikuti distribusi normal yang melingkar (persamaan (2.21) dengan µ = V = 0) sehingga deviasi standar dua sumbu yang saling
tegak lurus adalah sama, yaitu. σ x = σ y = σ .
Dalam melakukan percobaan untuk mengevaluasi probabilitas tembak atas sebuah senjata, kita memperbaiki target dan tembakan melingkar dari dari jarak tertentu yang ditujukan pada pusat target tersebut. Kami kemudian menghitung rasio jumlah tembakan kearah target atau tembakan untuk menentukan probabilitas tembak. Bisakah kita mengganti percobaan ini dengan simulasi? Kita bisa melakukannya jika kita mampu menghasilkan angka (x1, y1), i = l, 2 ...., yang mewakili koordinat titik-titik dampak dengan cara yang sama seperti dalam percobaan. Kami kemudian dapat mengevaluasi probabilitas tembak dengan mengulangi percobaan ini dan menghitung kasus di mana x2 + y2 ≤ R, dimana R adalah radiusi atau target melingkar. Jumlah tembakan yang menembak target dibagi dengan jumlah total tembakan akan memberikan probabilitas tembak dari sampel tunggal.
Contoh 3.2: Evaluasi probabilitas tembak atau senjata terhadap target melingkar dengan radius 2 m jika tembakan dari senjata mengikuti distribusi normal melingkar dengan standar deviasi 1,7 m.
Kita mengikuti langkah-langkah di atas dan mendapatkan satu pengaturan atau nomor acak yang normal untuk mewakili koordinat x dan y. Nomor acak yang normal diambil dari tabel nomor acak normal standar dengan penyimpangan normal dengan rata-rata 0 dan standar deviasi 1. Untuk mendapatkan variasi normal dengan rata-rata 0 dan deviasi standar 1,7, kami mencatat jika Z = N (µ, σ ) (Z adalah variabel acak dari populasi normal dengan rata-rata u dan deviasi standar a). Kemudian (Z - µ) / σ = N (0,1). Oleh karena itu, jika r adalah nomor acak yang dibaca dari tabel nomor acak normal, maka (Z - µ) / σ = r. Z dapat diperoleh sebagai pengalian nomor acak r dengan menambahkan µ yaitu, Z = r σ + µ
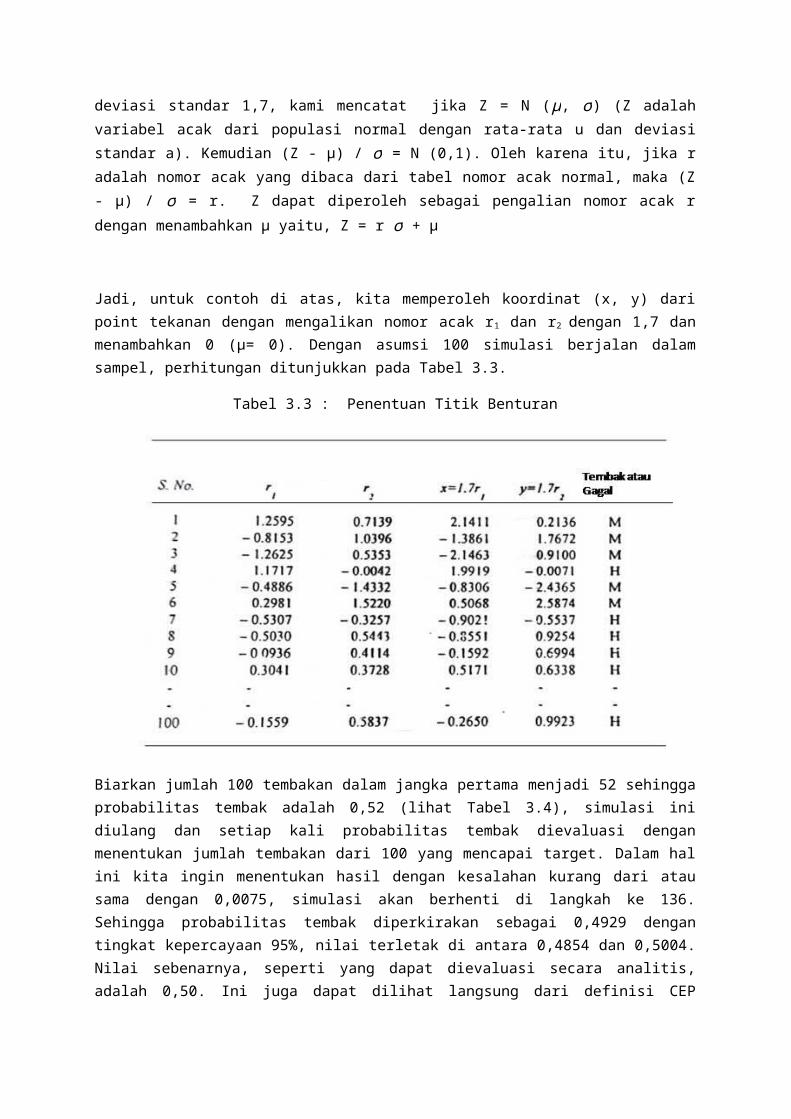
Jadi, untuk contoh di atas, kita memperoleh koordinat (x, y) dari point tekanan dengan mengalikan nomor acak r1 dan r2 dengan 1,7 dan menambahkan 0 (µ= 0). Dengan asumsi 100 simulasi berjalan dalam sampel, perhitungan ditunjukkan pada Tabel 3.3.
Tabel 3.3 : Penentuan Titik Benturan
Biarkan jumlah 100 tembakan dalam jangka pertama menjadi 52 sehingga probabilitas tembak adalah 0,52 (lihat Tabel 3.4), simulasi ini diulang dan setiap kali probabilitas tembak dievaluasi dengan menentukan jumlah tembakan dari 100 yang mencapai target. Dalam hal ini kita ingin menentukan hasil dengan kesalahan kurang dari atau sama dengan 0,0075, simulasi akan berhenti di langkah ke 136. Sehingga probabilitas tembak diperkirakan sebagai 0,4929 dengan tingkat kepercayaan 95%, nilai terletak di antara 0,4854 dan 0,5004. Nilai sebenarnya, seperti yang dapat dievaluasi secara analitis, adalah 0,50. Ini juga dapat dilihat langsung dari definisi CEP seperti yang dibahas dalam Bagian 2.11. Jika σ = 1,7, maka dari persamaan (2.26) CEP = 1,7 x 1,1774 = 2,0. Jadi dengan definisi CEP, 50 persen dari semua tembakan ditujukan pada pusat target dan akan terletak di lingkaran dengan radius 2. Oleh karena itu, probabilitas tembak adalah 50 persen atau 0,5.
Kemampuan Bertahan sebuah Tank
Kemampuan bertahan sebuah tank sepenuhnya bergantung kemampuan tank itu sendiri yang bisa dideteksi serta probabilitas serangan dari proyektile musuh. Hal ini juga bergantung pada upaya perlindungan dan fitur desain internal seperti ukuran tank itu sendiri serta kompartemennya. Untuk menghindari deteksi, ukuran dan ketajaman sudut tank harus dikurangi sejauh mungkin; sinyal audio, termal, magnetik dan radio dikendalikan, pengembangan kelincahan tank; kerahasiaan dan sistem peringatan harus digunakan. Untuk meningkatkan kemampuan bertahan sebuah tank, ukuran plat baja memainkan peran penting. Probabilitas membunuh dapat dikurangi dengan menggunakan kualitas yang lebih baik dari baja, penebalan dan kemiringan besi. Jika P adalah probabilitas dari kemampuan bertahan, kita memiliki
Psur = 1 - Pk
Tabel 3.4 : Penentuan Probolitas Tembak dengan Tingkat Kepercayaan 95%
dan P • k = Ps . Ph/s . Pk/h (3.2)
di mana P1 adalah probabilitas tank yang terdeteksi oleh tembakan musuh dan tembakan yang ditembakkan, P h / s adalah probabilitas tank yang diberi tembakan (proyektil) yang telah ditembakkan pada tank dan P adalah probabilitas tank yang telah dimatikan dengan memberi tembakan pada tank.
Probabilitas dari tank dapat dideteksi bergantung pada postur (yaitu, kepala atas atau lambung bawah), kemampuan jarak pandang (LOS), perangkat deteksi dan faktor lingkungan. Model tembak dapat dikembangkan mengingat faktor di atas. Model membunuh memerlukan rincian yang berkaitan dengan baju besi dengan karakteristik tank dan penempatannya, serta karakteristik proyektil. Bergantung pada jenis proyektil, model penetrasi dapat dikembangkan untuk menentukan probabilitas membunuh.
Disini kami akan membahas mengenai model yang sederhana untuk mengevaluasi kemampuan bertahan dari tank yang mana telah terdeteksi oleh proyektil KE (P s = 1). Kita asumsikan bahwa probabilitas membunuh dikenal untuk setiap plat atau tank pada sudut yang berbeda dari serangan untuk proyektil yang telah ditentukan. Mari kita asumsikan berikut 8 plat baja tangki:
(a) Plat baja polos lebih rendah dari lambung
(b) Plat baja polos lebih tinggi dari lambung
(c) Plat baja di hidung lambung

(d) Plat baja di samping lambung
(e) Plat polos pada menara
(f) Plat baja polos di samping menara
(g) Plat baja polos dibelakang menara
(h) Pelapisan pada menara.
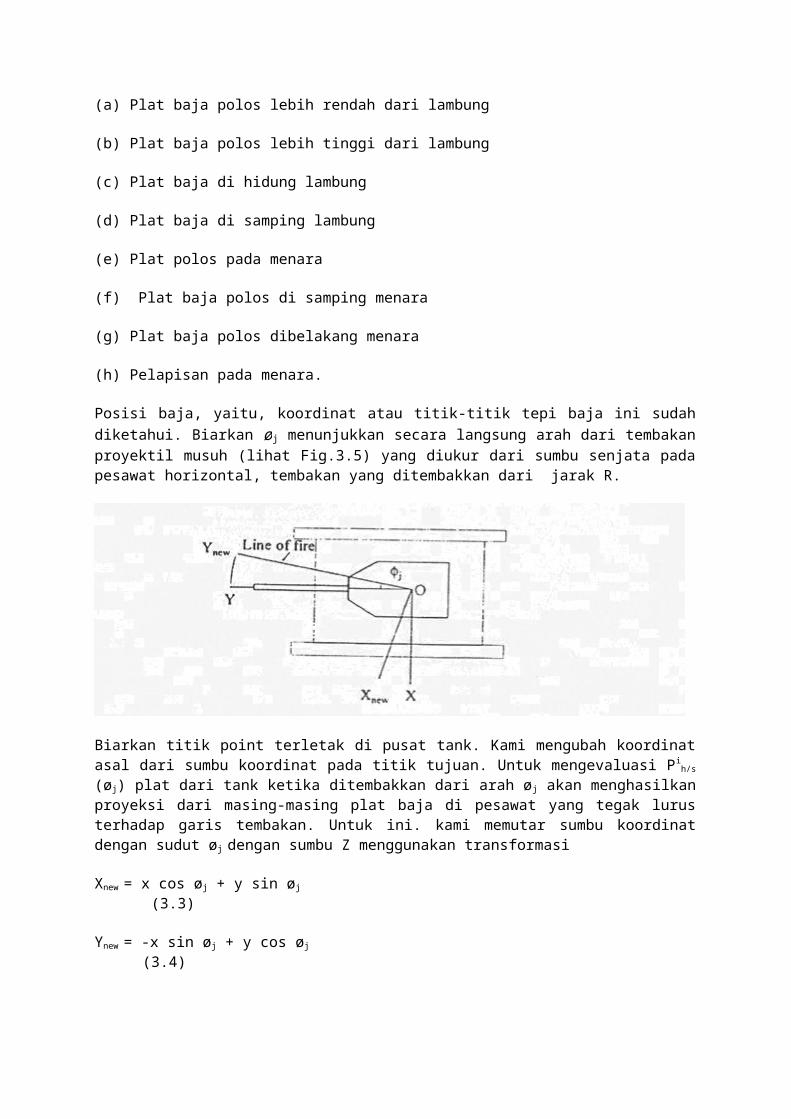
Posisi baja, yaitu, koordinat atau titik-titik tepi baja ini sudah diketahui. Biarkan ø j menunjukkan secara langsung arah dari tembakan proyektil musuh (lihat Fig.3.5) yang diukur dari sumbu senjata pada pesawat horizontal, tembakan yang ditembakkan dari jarak R.
Biarkan titik point terletak di pusat tank. Kami mengubah koordinat asal dari sumbu koordinat pada titik tujuan. Untuk mengevaluasi Pi
h/s (øj) plat dari tank ketika ditembakkan dari arah ø j akan menghasilkan proyeksi dari masing-masing plat baja di pesawat yang tegak lurus terhadap garis tembakan. Untuk ini. kami memutar sumbu koordinat dengan sudut ø j dengan sumbu Z menggunakan transformasi
Xnew = x cos øj + y sin øj (3.3)
Ynew = -x sin øj + y cos øj (3.4)
Ynew = z (3.5)
dimana (x, y, z) dan (xnew , ynew , znew.) adalah titik koordinat terhadap poros lama maupun yang berubah secara berurutan.
Sekarang arah menembakkan menjadi Ynew , - poros dan bidang tegak lurus terhadap garis tembak menjadi pesawat Xnew Znew . Untuk menghasilkan proyeksi dari plat baja pada pesawat Xnew Znew, kami tempatkan koordinat Ynew sama dengan nol setelah transformasi. Biarkan a dan a menjadi standar deviasi dari proyektil pada kisaran R sepanjang poros Xnew dan Znew - sudut. Kita menghasilkan sepasang nomor acak normal yang terdistribusi dengan øx dan øy sebagai standar deviasi untuk mensimulasikan tembakan dari arah yang diberikan. Jika nomor acak jatuh dalam area proyeksi pesawat, itu dianggap berhasil; selain itu adalah gagal. Jumlah rasio tembakan pada percobaan yang dilakukan memberikan probabilitas tembak Pi
h/s (øj) Dengan mengulangi logika yang sama,
probabilitas tembak secara keseluruhan, 8 plat, dievaluasi. Dengan asumsi P ik/h (øj) yang telah
diketahui yaitu plat dan sudut serangan øj , Pk (øj) kemudian dievaluasi dengan rumus berikut:
Untuk plat-plat yang tidak benar-benar terkena tembakan, P ... diambil sebagai nol. Probabilitas membunuh dalam busur frontal -, untuk +, dievaluasi dengan menggambar busur radius R (range) dan mempertimbangkan N dengan jarak point yang sama pada busur ini. Simulasi diulang dengan menempatkan senjata di masing-masing titik N. Probabilitas membunuh rata-rata Ph (±) kemudian dievaluasi dengan rumus
di mana øj sudut antara senjata musuh pada titik dan sudut pada senjata.
Hal ini juga diketahui bahwa tank bergerak dalam formasi tertentu dan menutup ke tank lainnya. Menjadi sulit bagi musuh untuk menyerang dari samping dan belakang. Dalam skenario pertempuran yang khas, telah diperkirakan berdasar data empiris dari perang dunia I bahwa 46% dari serangan adalah dihadapkan pada busur frontal ± 300, 52% dari sisi, yaitu, 300 sampai 1500 dan -300 untuk -1.500 dan 2% dari belakang, yaitu. -1500 sampai 1500. Jadi probabilitas membunuh Pk mempertimbangkan tembakan dari arah manapun, dapat dievaluasi
mengikuti:
Pk = 0.46 Pk (Serangan frontal) + 0.52 Pk (serangan sisi) + 0.02 Pk ( serangan jarak dekat) (3.8)
dan kemampuan bertahan ini kemudian dievaluasi dengan menggunakan persamaan (3.1).
Contoh 3.3: Biarkan titik koordinat pada point sudut dari plat polos (dalam meter) dari tank diberikan sebagai (0.6,1.0.0.5), r1.1,0.1,0.8), (-1.10.1,0.8), (-0.6,1.0.0.5) dan
Biarkan garis tembakan membuat sudut 1500 dengan poros senjata. Asumsikan deviasi standar proyektil menjadi 0,5 m di kisaran 1500 m dengan jarak øx = øz = 0,5. (Gambaran depan dan samping dari plat baja polos ditampilkan pada Gambar. 3.6 dan 3.7 secara berurutan).Mengevaluasi probabilitas tembak dari plat polos.
(3.6)
(3.7)
Gambar 3.6 : Gambaran Plat Polos dari Samping
Gambar 3.7 : Menara Plat Polos Dilihat dari Depan
Untuk menemukan proyeksi dari plat polos di pesawat yang tegak lurus terhadap garis tembak, kami menerapkan transformasi yang diberikan oleh persamaan (3.3) ke (3,5). Koordinat baru dari titik sudut menjadi (o.84,0.81,0.5), (1,09, -0.19,0.8), (-1.04,0.38,0.8), (- 0.32,1.12,0.5). Proyeksi titik-titik ini pada pesawat X new Znew (yaitu, bidang tegak lurus terhadap garis tembak) akan memiliki koordinat (0.84,0.5), (1.09,0.8), (-1.04,0.8) dan (-o.32,0.5 ). Kita sekarang menghasilkan dua angka acak r1 dan r2, dari distribusi standar normal dan menghitung x1 = r1 cx , zr = r2 cz, dan membentuk pasangan (xr. zr) untuk mewakili titik acak di pesawat Xnew Znew. Jika titik acak (xr , zr) Terletak pada plat yang di proyeksikan, kita menyebutnya berhasil. Perhitungan ditunjukkan pada Tabel 3.5.

Tabel 3.5 : Keberhasilan pada Plat Baja Polos
δ
Hal terakhir untuk melihat berhasil atau gagalnya hal ini, akan dilengkapi setelah memplot titik (xr, zr,) pada grafik yang berisi angka proyeksi plat polos. Namun, lebih baik menggunakan komputer algoritma untuk memastikan apakah titik (xr, zr) terletak di dalam atau di luar plat yang diproyeksikan. Misalnya, untuk menguji apakah titik (xr , zr.) Terletak di dalam plat yang diproyeksikan (poligon cembung), kita gabungkan titik dengan empat simpul yang diatur dalam urutan siklik sesuai permintaan. Jika jumlah sudut garis yang bergabung dengan simpul adalah 3600, ini berarti ada dalam plat: jika tidak, berarti berada luar. Ini adalah salah satu angka atau metode memungkinkan dalam memeriksa apakah titik jatuh di dalam plat atau di luar. kami mengulangi percobaan ini berkali-kali (misalnya 100). Jumlah keberhasilan dibagi dengan jumlah percobaan yang dilakukan akan memberikan probabilitas tembak. Analisis untuk menentukan batas-batas untuk tingkat kepercayaan tertentu kemudian dapat dibuat seperti pada Contoh 3.1.
Probabilitas Pencapaian dari Senjata Tank
Probabilitas pencapaian tembak dari senjata tank dapat dievaluasi dengan menentukan atau memperkirakan kesalahan dalam berbagai subsistem yang bertanggung jawab untuk membidik dan menembak target. Pertama, sejumlah sensor yang digunakan untuk menentukan parameter seperti kecepatan angin, suhu, bentuk tabung, jangkauan. Data yang diterima oleh sensor mungkin memiliki beberapa kesalahan. Informasi dari sensor bersama dengan parameter lain seperti tabung pakai, variasi kecepatan moncong, diumpankan ke komputer balistik untuk menghitung ketinggian dan sudut azimut untuk menyelaraskan senjata. Kesalahan sensor dalam memperhitungkan ketinggian dan sudut azimut disebut sensor error. Sebagai perhitungan atau ketinggian dan sudut azimut juga didasarkan pada prosedur perkiraan di komputer balistik, mungkin ada kesalahan pada komputer balistik (δ b)
Kedua, kesalahan senjata dapat diklasifikasikan bergantung pada status tembak tank dari target. Dalam kasus penembakan statis tank pada target statis, kesalahan adalah kesalahan posisi senjata (δpos) dan kesalahan penyebaran amunisi (δ a). Untuk tank penembak statis pada target yang bergerak, kesalahan senjata yang harus di followup (δ f) kesalahan peletakan senjata (δ l)dan kesalahan penyebaran amunisi (δ a). Untuk tank bergerak yang menembak target bergerak kesalahan adalah error pada follow up senjata (δ f) kesalahan peletakan senjata (δ l), kesalahan pada tanda garis (δ los)
Kesalahan stabilisasi senjata (δ stab) dan kesalahan penyebaran amunisi (δ a) Untuk meringkas, total kesalahan dalam situasi yang berbeda, dengan asumsi model linier, adalah sebagai berikut:
Kesalahan-kesalahan ini diasumsikan untuk mengikuti baik distribusi normal maupun beraturan dan dapat ditambahkan dengan tepat untuk mendapatkan efek jelas dari ketinggian serta di azimut. Penyebaran amunisi kemudian disimulasikan dengan menggambar sepasang nomor acak yang terdistribusi normal. jika titik simulasi dari tekanan jatuh dalam dimensi sasaran, itu berarti sukses. Rasio tembakan dari keseluruhan jumlah tembakan disimulasikan yang menentukan probabilitas tembak atau sistem senjata.
Hal ini dapat dilihat bahwa probabilitas tembak dicapai oleh tank dalam berbagai situasi tembak dan dapat diperkirakan dengan menggunakan keakuratan atau subsistem dalam desain. Jika akurasi yang diinginkan yang disebutkan dalam spesifikasi tidak terpenuhi, perlu untuk meningkatkan subsistem. Dengan demikian merujuk metodologi di atas dapat membantu untuk menentukan apakah spesifikasi yang ditentukan oleh pengguna dapat dicapai.
Contoh 3.4r: Mari kita mempertimbangkan untuk menentukan pencapaian probabilitas tembak untuk statis tank yang menembak pada sasaran lambung bawah (statis). Untuk situasi ini, kesalahan dan distribusinya adalah sebagai sebagai berikut:
Error Distribusi
(i) Kesalahan sensor 0.1 mil Merata
(ii) Kesalahan komputer balistic 0.15 mil Merata
(iii) Kesalahan posisi senjata (1 a) 0.1 mil Normal
(iv) Kesalahan penyebaran amunisi 0.2 mil Normal
Dapat dicatat bahwa kesalahan dalam mils. Kesalahan diberikan sebagai k mil sama dengan
kesalahan linear kx R / 1000 (dalam meter) a pada jarak R (dalam meter). Lebih lanjut kita
mengasumsikan bahwa kesalahan yang sama di azimut dan ketinggian pesawat. Biarkan kisaran
penembakan menjadi 1500 m dan biarkan target lambung bawah mewakili 1 m x I m target persegi.
Kita menggambar nomor acak merata r1 dalam interval [0,1]. Untuk mensimulasikan
kesalahan sensor, kami mencatat bahwa batas kesalahan pada 1500 m dengan jarak ± 0,1 x
1500/1000 = ± 0,15 m. Dengan demikian δ s kesalahan sensor dengan asumsi distribusi unifomm
dalam interval (-0,15. 0,15) dapat dihitung sebagai δ 1 = -0,15 + 0,3 r1. Seperti kesalahan komputer
balistik juga mengikuti distribusi uniform, dihitung sama. Biarkanδ 1 menjadi jumlah errorδ s dan .δ b
Kesalahan posisi senjata (δ pos) dan kesalahan penyebaran amunisi (δ a) mengikuti distribusi normal
dengan standar deviasi 0,1 x 1500/1000 0,15 dan 0,2 x 1500/1000 = 0,3 pada jarak 1500 m. Jumlah
kesalahan ini juga mengikuti distribusi normal dengan standar deviasi [(0,15)2 + (0,3)2 1/2] 0,335.
Angka acak r3, dari standar distribusi normal yang dihasilkan dan nilai 0,335 x r3, dapat dihitung.
Nomor acak ini mensimulasikan efek dari kesalahan (iii) dan (iv). Mari kita sebut jumlah δ 2.
Biarkan δ = δ 1 + δ 2 merupakan total kesalahan dalam pesawat azimut. Karena kesalahan ini, titik
tekanan akan menyimpang di arah X untuk nilai x (=δ ). Beberapa perhitungan sampel untuk x
diberikan dalam Tabel 3.6.
Kami ulangi prosedur untuk mendapatkan jumlah kesalahan dalam ketinggian pesawat dan
menyebutnya z. Jika titik (x, z) jatuh dalam I mx I m sasaran, yaitu, koordinat kwadrat (- 0,5, - 0,5),
(0,5, - 0,5), (0.5,0.5) dan (- 0.5,0.5), kita menyebutnya berhasil/tembak: atau itu adalah
gagal/meleset
kami mengulangi percobaan beberapa kali (misalnya 100). Jumlah tembakan-tembakan dibagi
dengan jumlah atau percobaan yang dilakukan, ini akan memberikan probabilitas tembak dari satu
contoh. Analisis untuk menentukan batas-batas untuk tingkat tertentu atau kepercayaan dapat
dilakukan seperti pada Contoh 3.1.
Tabel 3.6 : Koordinat –X dari Titik Tekanan
Dalam contoh di atas, kami mengkhawatirkan beberapa masalah yang sangat sederhana yang melibatkan beberapa peristiwa. Namun, simulasi sistem kehidupan nyata mungkin melibatkan
sejumlah peristiwa berbeda dan kita harus melacak semua peristiwa yang ada pada setiap titik atau waktu. Kami menggambarkan metodologi dengan mempertimbangkan masalah yang sedikit rumit berkaitan dengan keterlibatan pertahanan udara di mana kapal yang dilengkapi dengan sistem pertahanan udara "Qracking radar dan SAM) diserang oleh sejumlah pesawat
Sebuah Perjanjian Pertahanan Udara Angkatan Laut
Sebuah kapal dilengkapi dengan sistem pengawasan radar yang menyediakan informasi target awal mengenai penyerangan pesawat yang terbang rendah. Waktu penundaan antara pesawat yang masuk melintasi radar cakrawala kapal dan terdeteksi oleh radar pengawas diasumsikan terdistribusi secara normal (dalam arti µ dan deviasi standar σ ). Setiap sistem pertahanan udara pada papan kapal pengawal memiliki radar pelacakan terkait dan beberapa rudal udara. Waktu penundaan untuk membangun pelacakan diasumsikan mengikuti distribusi eksponensial yang fungsi distribusi kumulatif yang diberikan oleh 1- exp (- λt) di mana 1/λ adalah waktu penundaan untuk membangun pelacakan.
Mari kita berasumsi bahwa sistem pertahanan udara yang dipasang pada kapal secara otomatis terlibat pada setiap pesawat yang memasuki zona perjanjiannya. Jika tersedia lebih dari satu pesawat, ini akan menyeleksi pesawat yang datang terlebih dulu. Hal ini diasumsikan bahwa pesawat datang baik secara simultan (yaitu, selang waktu antara pesawat menyerang sama dengan nol) atau berurutan (yaitu, dengan selang waktu lebih besar dari nol).
Urutan keterlibatan terdiri dari deteksi, akuisisi, tembak. Intersepsi dan menembak diulang. Untuk keterlambatan deteksi, angka acak normal digunakan. Untuk akuisisi keterlambatan, nomor acak seragam u antara 0 dan 1 dihasilkan dan keterlambatan pelacakan yang dievaluasi dengan mengasumsikan distribusi eksponensial sehingga
u = 1 - exp (-λt)
atau t = (1/λ).) Iog (l / (1-u)). (3.12)
Setelah pelacakan selesai, diasumsikan bahwa ada beberapa waktu reaksi sebelum memulai tembakan. Keputusan menembak diambil dengan menghitung jarak pesawat dari kapal (dengan mempertimbangkan kecepatan rudal dan pesawat) ketika rudal akan menghadang. Jika pesawat berada di antara jarak minimum dan maksimum rudal, rudal ditembakkan. Probabilitas rudal menembak (pembunuhan) pesawat dan keandalan rudal dipertimbangkan. Jika pesawat yang masuk tidak tertembak atau terbunuh oleh rudal, maka diambil keputusan untuk menembak ulang dengan menghitung jarak pesawat dari kapal ketika rudal akan menghadang. Terdapat pengulangan waktu tunda sebelum rudal ditembakkan lagi melawan target. Jika sistem pertahanan udara di kapal tersebut tidak dapat membunuh pesawat yang masuk, diasumsikan bahwa senjata yang dilepaskan dari pesawat menembak kapal dengan probabilitas yang diberikan. Masalahnya adalah untuk menentukan jumlah rata-rata pesawat dibunuh dan jumlah rata-rata tembakan pada kapal. Kami menggambarkan solusi dari masalah ini dengan sebuah contoh.
Contoh 3.5: Kita asumsikan bahwa meskipun senjata yang dilepaskan dari pesawat menembak kapal, tidak ada kerusakan yang disebabkan oleh senjata dan radar di kapal tersebut. (Ini bisa lebih mudah

dengan asumsi yang lebih realistis di mana tembakan dari sebuah pesawat menyebabkan kerusakan pada senjata dan radar pada kapal dengan probabilitas tertentu atau / dan kapal menjadi non-operasional jika menerima beberapa tembakan). Data kinerja untuk masalah hipotetis diberikan di bawah ini:
Penyerangan pesawat:Kecepatan : 300 mIsProbabilitas tembak dari senjata yang dilepaskanPesawat melawan kapal : 0.6
Roket pada kapalMinimum jarak efektif : 1500mMaximum jarak efektif : 8000mKecepatan rata-rata roket : 6o0 mn/sKeandalan (dalam menangkap) : 0.8Probabilitas tembak : 0.9Waktu bereaksi : 2 sWaktu pengulangan : 2 s
Jarak pengawasan radar : 102o0mWaktu penundaan untuk mendeteksi : 1S sStandart waktu penyimpangan untuk deteksi : 3 sWaktu tunda untuk mengakuisisi target (I/A) : 5 s.
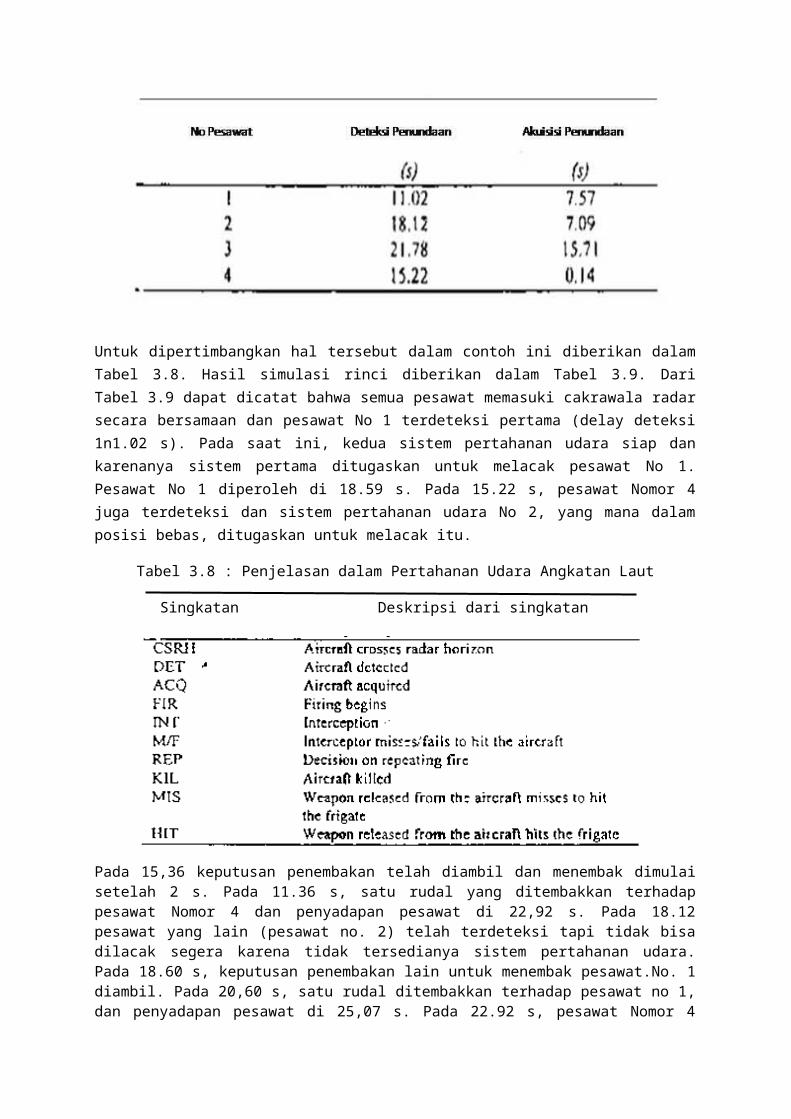
Asumsikan bahwa empat pesawat melintasi cakrawala radar secara bersamaan. Hal ini lebih lanjut diasumsikan bahwa ada dua sistem pertahanan udara dipasang pada kapal (yaitu, dua radar pelacakan dan peluncur rudal terkait). Menentukan rata-rata jumlah pesawat terbunuh dan rata-rata jumlah tembakan di kapal tersebut. Deteksi dan pelacakan penundaan sistem radar untuk pesawat ini untuk menjalankan simulasi telah diperoleh dan diberikan dalam Tabel 3.7.
Tabel 3.7 : Deteksi dan Akuisisi Penundaan
Untuk dipertimbangkan hal tersebut dalam contoh ini diberikan dalam Tabel 3.8. Hasil simulasi rinci diberikan dalam Tabel 3.9. Dari Tabel 3.9 dapat dicatat bahwa semua pesawat memasuki cakrawala radar secara bersamaan dan pesawat No 1 terdeteksi pertama (delay deteksi 1n1.02 s). Pada saat ini, kedua sistem pertahanan udara siap dan karenanya sistem pertama ditugaskan untuk melacak pesawat No 1. Pesawat No 1 diperoleh di 18.59 s. Pada 15.22 s, pesawat Nomor 4 juga terdeteksi dan sistem pertahanan udara No 2, yang mana dalam posisi bebas, ditugaskan untuk melacak itu.
Tabel 3.8 : Penjelasan dalam Pertahanan Udara Angkatan Laut
Singkatan Deskripsi dari singkatan
Pada 15,36 keputusan penembakan telah diambil dan menembak dimulai setelah 2 s. Pada 11.36 s, satu rudal yang ditembakkan terhadap pesawat Nomor 4 dan penyadapan pesawat di 22,92 s. Pada 18.12 pesawat yang lain (pesawat no. 2) telah terdeteksi tapi tidak bisa dilacak segera karena tidak tersedianya sistem pertahanan udara. Pada 18.60 s, keputusan penembakan lain untuk menembak pesawat.No. 1 diambil. Pada 20,60 s, satu rudal ditembakkan terhadap pesawat no 1, dan penyadapan pesawat di 25,07 s. Pada 22.92 s, pesawat Nomor 4 telah terbunuh dan pertahanan sistem senjata udara ditugaskan untuk pesawat ketiga. Pada 25,07, maka roket ditembakkan dari sistem senjata pertama meleset target dan keputusan untuk menembakkan rudal lain di pesawat yang sama diambil. Pada 29.39 s, pesawat No.1 telah terbunuh. Dua pesawat yang tersisa tidak dihadang oleh rudal dan menembak senjata mereka di kapal.Sangat mudah untuk dicatat bahwa peningkatan jumlah atau pesawat dan sistem pertahanan udara akan menjadi masalah, solusi kompleksitas meningkat. Misalkan jumlah
Tabel 3.9 : Hasil Simulasi
sistem pertahanan senjata udara yang terpasang pada kapal tersebut meningkat dari 2 sampai 8. Berarti, ancaman juga dari 8 serangan pesawat. Jumlah pesawat yang terbunuh dan jumlah rata-rata pesawat menembak kapal dapat dihitung. Hasil yang ditunjukkan pada Gambar. 3,8 dan 3,9 adalah untuk satu sampel atau 100 ulangan. Seperti yang diharapkan, jumlah rata-rata serangan di kapal menurun dengan meningkatnya jumlah sistem pertahanan udara. sedangkan rata-rata jumlah pesawat terbunuh meningkat. Dengan meningkatkan jumlah sistem senjata di luar 8, tidak ada perbaikan dalam membunuh atau probabilitas tembak karena jumlah pesawat menyerang telah diasumsikan delapan saja. Jika jumlah menyerang pesawat dan sistem pertahanan udara sangat besar, peristiwa ini terkelompok dan akan disarankan untuk melakukan simulasi konstant bukan sebuah simulasi-event.
Situasi mungkin timbul dalam simulasi sistem diskrit di mana dua jenis peristiwa dapat divisualisasikan. Salah satu jenis sangat penting dan membutuhkan update langsung dari negara pada saat kejadian dan yang lain relatif kurang penting dan tidak memerlukan update segera. Dalam kasus tersebut, tipe hybrid atau simulasi menggunakan simulasi-event untuk jenis peristiwa pertama dan simulasi konstan-waktu-langkah untuk jenis peristiwa kedua jelas akan lebih disukai.
Gambar 3.8 : Efek dari Angka Sistem Pertahanan Udara pada AngkaRata-Rata dari Tembakan pada Kapal
Gambar 3.9 : Efek dari Jumlah Sistem Pertahanan Udara Terhadap Rata-Rata dari Pesawat yang Terbunuh
SimuIasi militer dapat diklasifikasikan ke dalam Senjata atau sistem sensor, platform tunggal, kelompok tugas, analisis misi dan simulasi di medan perang. Simulasi senjata atau sistem sensor membantu dalam mengevaluasi efektivitas sistem tunggal, misalnya, bertahan hidup dari tank atau probabilitas tembak dicapai dari senjata tank. Berbagai jenis sistem senjata dapat dimuat pada platform tunggal dan karenanya simulasi untuk satu platform harus dapat menganalisis kemampuan platform dilengkapi dengan berbagai jenis atau sistem senjata. Sebagai contoh, Model SEAROADS (simulasi, Evaluasi, Analisis dan Penelitian Pada Sistem Pertahanan Udara) (lihat van Dongen dan Kos 1995) yang telah digunakan untuk menganalisis secara rinci kemampuan pertahanan udara dari kapal yang dilengkapi dengan radar, sistem senjata jarak menengah, sistem senjata jarak dekat, sistem senjata jarak sangat dekat, dan sistem tembak rendah. kelompok tugas dapat terdiri dari beberapa platform dengan tugas yang diberikan; analisis misi dapat terdiri dari beberapa kelompok tugas dan simulasi pada tingkat medan perang yang mungkin terdiri dari beberapa misi. Pada setiap tingkat simulasi, hasil simulasi pada tingkat sebelumnya digunakan sebagai penghalang gedung. Kami mengklasifikasikan hirarki di atas menjadi dua kategori besar, yaitu sistem senjata simulasi yang mencakup senjata dan simulasi sensor, dan simulasi tempur yang mencakup platform tunggal, kelompok tugas, analisis misi dan simulasi medan perang. Dapat dicatat bahwa diskusi simulasi pada bagian 3.4 adalah sistem simulasi senjata.
Simulasi tempur juga dapat dipertimbangkan sebagai satu-versus-satu (juga disebut satu-satu), satu-versus-banyak, beberapa-versus-sedikit, banyak-versus-banyak atau tingkat medan perang. Contoh satu-versus-satu adalah Simulasi dari duel tank dan senapan pertahanan udara terhadap pesawat terbang. Simulasi ini mengandung dinamika rinci senjata bersaing dan karena mempertimbangkan berbagai parameter yang mempengaruhi perilaku sistem. Dalam kasus tersebut, simulasi sistem kontinu umumnya lebih disukai. Satu-versus-salah satu simulasi yang berguna untuk menentukan teknik dan untuk mengevaluasi taktik baru. Namun, hasil yang diperoleh melalui simulasi ini dalam isolasi efek lainnya. Satu-versus-banyak adalah generalisasi dari satu-versus-satu. Sebuah simulasi pertempuran antara satu skuadron helikopter serang dan satu skuadron tank di mana helikopter dan tank dianggap sebagai individual ini adalah contoh dari beberapa-versus-sedikit. Hasil yang diperoleh melalui simulasi ini juga dalam isolasi dari efek lain seperti dukungan dari skuadron lain atau resimen. Simulasi tingkat medan perang lebih komprehensif tetapi gambaran yang dikumpulkan menekan sejumlah faktor yang diperlukan untuk satu-lawan satu, satu-versus-banyak dan beberapa-versus-beberapa simulasi (lihat Mann i991).
Hal lain yang penting adalah tentang tingkat resolusi dalam studi simulasi. misalkan kita mempertimbangkan situasi tank duel satu-lawan satu-. simulasi situasi seperti ini mungkin membutuhkan informasi tentang posisi dari dua tank, probabilitas tembak, probabilitas membunuh dan gerak proyektil. seperti model tingkat mikro atau simulasi disebut sebagai model resolusi tinggi atau simulasi. Ini rincian micro level tidak diperlukan jika kita mengkhawatirkan dengan hasil pertempuran baja di batalion atau tingkat yang lebih tinggi. model atau simulasi seperti ini disebut sebagai resolusi rendah atau simulasi.
Mengingat berbagai macam kegunaan dari para pengguna pengguna, ada peningkatan dalam penekanan pada simulasi tempur yang memuaskan kebutuhan pengguna saat ini sebagimana yang mereka inginkan untuk efektifitas biaya dalam jangka panjang.Hal ini menimbulkan tantangan baru bagi para pembuat simulasi. Untuk mencapai fleksibilitas lebih dan efektivitas biaya dalam pengembangan, pengoperasian dan pemeliharaan simulasi tempur ini, bidang-bidang berikut harus diatasi oleh komunitas simulasi (lihat Might 1993):
(a) Sebuah arsitektur simulasi tempur umum (b) kebutuhan Pengguna (c) Integrasi dengan model analisis lainnya.
Might (1993) menunjukkan bahwa kebutuhan pengguna dan integrasi tidak dapat ditangani dalam jangka panjang tanpa perbaikan dalam arsitektur dalam semua simulasi tempur. Perkembangan penting dalam merancang arsitektur tingkat tinggi ini adalah penggunaan Program Orientasi Struktur Objek (OOPS). Marshall dan Garrett (1996) mendiskusikan pendekatan ini untuk mensimulasikan Perintah, Control, Komunikasi, Komputer, Intelijen, Pengawasan dan Pengintaian (C4ISR).
3.6 Paket Simulasi Cakupan luas dari simulasi dan paket tujuan perang muncul di ABCA Program Standardisasi Tentara. Katalog War Games (1992). Oswalt (1993) merangkum simulasi dan game aplikasi militer terbaru di Amerika Serikat. Sebuah penjelasan singkat dari beberapa hal umum namun penting dalam paket simulasi, secara luas disebut dalam literatur, diberikan dalam bagian ini.
(i) Simulasi. Evaluasi, Analisis dan Penelitian Pada Sistem Pertahanan Udara (SEAROADS): Model ini telah dikembangkan untuk menganalisis secara rinci kemampuan pertahanan udara angkatan laut anti-pesawat kapal Royal Netherlands. Model ini dapat digunakan untuk
(a) Penilaian kinerja, persyaratan dan kontribusi sistem saat ini dan masa depan untuk kemampuan keseluruhan kapal untuk bertahan terhadap serangan
(b) Evaluasi kinerja dari aturan penyebaran (c) Investigasi dari integrasi dan koordinasi dari kerja keras yang berkelanjutan pada senjata
pembunuh lunak dan keras (d) Analisis kontribusi oleh sistem pertahanan baru
SEAROADS terdiri dari empat sub-model yaitu, KARPET, WASP, MISVAC dan EW. KARPET membutuhkan radar gelombang, ketidakstabilan pemancar, waktu, jitter, pengolahan Doppler, pola antena, kondisi lingkungan (laut negara, tinggi saluran dan angin) sebagai masukan. Ini menghasilkan kinerja deteksi radar pencarian di bawah kondisi lingkungan yang berbeda. WASP adalah 6 derajat digital bebas pada simulasi fasilitas analisis satu-satu yang membutuhkan data mengenai sasaran, rudal dan lingkungan untuk menghasilkan lintasan rudal dan probabilitas membunuh sebagai fungsi jarak intercept. MISVAC menghitung probabilitas membunuh sebagai fungsi jarak yang meleset,

geometri dan hulu ledak. Model EW menentukan kinerja soft-kill terhadap rudal musuh. Ini perlu target rinci, data lingkungan dan sistem, dan hasil dalam probabilitas target untuk memilih kapal atau keadaan awan yang bergantung pada lintasan dan radar perlintasan bagian.
(ii) Sistem Pertahanan Udara Modeling komputer (COMO III): Ini adalah paket simulasi canggih yang dikembangkan oleh SHAPE Teknis pusat (The Hague, Belanda) untuk simulasi pertahanan udara (Dockery et al 1976.). Ini adalah sebuah sistem dua sisi dengan satu sisi memiliki logika keputusan tetap untuk skenario tertentu. Hal ini digunakan untuk mengevaluasi efektivitas campuran dari sistem pertahanan udara darat terhadap serangan dan ancaman udara, dan rudal taktis dalam skenario taktis realistis. Perincian hal ini sampai dengan operasi tunggal pesawat, rudal atau Pertahanan Satuan Udara (ADU). Skenario taktis, senjata dan karakteristik ECM, efek cuaca, ADU penyebaran, doktrin menembak, aturan keterlibatan dan pertahanan darat yang diambil sebagai masukan. Skenario yang disimulasikan sebagai simulasi-event untuk menghasilkan catatan peristiwa per peristiwa, statistik beberapa replikasi dan ringkasan membunuh. Sistem ini tersedia di berbagai platform perangkat keras komputer dan telah ditulis dalam FORTRAN-77
(iii) Simulasi Sistem pertahanan udara (ADS): Ini telah komputerisasi, simulasi pertempuran dua sisi berkaitan dengan efektivitas, taktik, doktrin dan penyebaran sistem senjata AD. Jarak ukuran skenario berkisar dari satu pada satu ke divisi atau korps. Ini adalah stokastik, model fungsi kejadian diskrit area tempur pada pertahanan udara. Ini diprogramkan dalam SIMSCRIPT 11,5 dan FORTRAN. Model dasar juga memiliki pre processor grafis warna untuk mengembangkan profil penerbangan. (iv) Contoh Generator Tempur (COSAGE V): Ini adalah dua sisi yang simetris, resolusi tinggi, model simulasi stokastik pertempuran antara dua kekuatan. Ini memberikan skor pembunuh-korban (lihat Anti Potensi-Metode Potensi pada bagian I 1.2) untuk digunakan dalam model tingkat medan perang seperti CEM, TACWAR, TAC THUNDER dan CADEM.
Ini adalah simulasi berdasar suatu kejadian dengan fenomena stochastic yang dimodelkan melalui kegiatan dan proses. Model waktu mengontrol berbagai proses. COSAGE menghitung efek tembakan langsung pada senjata kecil, tank, kendaraan tempur, ATGMs dan ranjau. Efek tembakan tidak langsung seperti dari tabung artiliery, mortir dan MRL juga disertakan. Ini adalah model dari efek medan tempur, cuaca pada operasi tempur. Sistem target akuisisi utama seperti radar tanah pengawasan, pengamat di depan, suara dan cahaya sensor, penghitung mortir dan radar baterai, tujuan pengamat dan RPVs juga dimodelkan. Ini mensimulasikan 48 jam pertempuran antara dua kekuatan yang berlawanan. Resolusi turun ke peleton untuk unit manuver dan turun pada senjata individu untuk pertempuran jarak dekat.(v) konsep Evaluasi Model (CEM): Ini adalah model deterministik dua sisi yang melibatkan pasukan darat dan udara. Ini adalah model pengendalian piston yang membutuhkan kekuatan yang berlawanan selaras dan berhadapan pada sepanjang garis (disebut Pertempuran Area Tepi Depan (FEBA)) dari kontak dan membagi baris ini ke dalam berbagai sub-kelompok yang lebih kecil atau disebut piston. Pertempuran kemudian dilancarkan di antara masing-masing kekuatan di setiap piston dan FEBA disesuaikan bergantung pada hasil pertempuran di setiap piston.
CEM mengambil data korban-pembunuh sebagai masukan atau interaksi antara dua divisi yang berlawanan yang diperoleh dari model divisi stochastic level yang disebut COSAGE. Proses kalibrasi (ATCAL) menerjemahkan beberapa COSAGE yang sedang berlangsung dari pertarungan tingkat divisi yang sama untuk data yang dapat digunakan yang memungkinkan ekstrapolasi dari nilai-nilai pembunuh-korban untuk menilai gesekan pada setiap ukuran pada pertempuran yang terjadi pada piston CEM. ATCAL memberikan skor korban-pembunuh, alokasi tembakan, pengeluaran amunisi dan kepentingan relatif dari semua senjata. Tahap I dari proses ATCAL dijalankan sebelum operasi CEM dan dijalankan secara terpisah untuk setiap kombinasi medan pertempuran. Tahap II dari

proses ATCAL beroperasi dalam CEM dan dijalankan secara terpisah untuk setiap keterlibatan, menggambar data dari hasil yang disimpan pada Tahap I untuk kombinasi medan perang yang sesuai.CEM awalnya dirancang untuk mensimulasikan pertempuran Soviet-NATO dengan karakter Eropa. CEM telah banyak digunakan oleh Badan Analisa Konsep US Army (CAA) untuk menganalisis skenario yang berkaitan dengan Eropa pusat, Korea, Iran dan operasi medan perang Iraq. Selama operasi Badai Gurun, hal itu digunakan untuk menganalisis pertempuran Sekutu -Iraq (lihat Applegate 1995).
(vi) Versi Stochastic dari CEM (STOCEM): Konsep Evaluasi Model (CEM) yang dibahas di atas adalah simulasi komputer deterministik tingkat medan tempur. Jelas, versi stokastik, CEM akan diperlukan untuk memperhitungkan ketidakpastian umum dalam pertempuran nyata. Akan tetapi, itu awalnya tidak mungkin untuk mengembangkan versi stochastic karena eksekusi besar akan membutuhkan waktu untuk mendapatkannya. Dengan munculnya komputer yang lebih cepat, ini menjadi mungkin dan versi stokastik CEM, disebut STOCEM, sekarang telah tersedia (lihat Johnson e al. 1995). Rinciannya dapat diperoleh dari laporan Konsep US Army Badan Analisis (1991).(vii) C3ISIM: Ini adalah model simulasi banyak - pada - banyak yang dirancang untuk menunjukkan interaksi komando dan kontrol penghubung, sistem senjata, komunikasi penghubung dan sensor intelijen dalam skenario pertahanan udara. Ini membantu pengembang dan pengguna potensial dari sistem C31 yang baru dengan cepat, akurat dan murah, menentukan seberapa baik desain atau pekerjaan tertentu dari suatu sistem akan memenuhi kebutuhan operasional. Hal ini dilakukan melalui pemodelan:
(a) Perintah dan proses kontrol menggunakan aturan yang berdasar pada pengambilan keputusan
(b) Gesekan tempur dan gesekan banyak-pada-banyak yang dinamis, pengguna dikendalikan oleh lingkungan yang sepenuhnya melatih arsitektur C31
(C) Proses seperti deteksi target, EW dan komunikasi berupa pesan-pesan yang mengalir.
Model ini digunakan oleh USAF untuk menganalisis operasi udara selama operasi Penyelamatan Gurun atau Badai Gurun untuk mengetahui terjadinya sekutu udara (Kasus et al. 1995).
(viii) Simulasi Peperangan Taktis Tingkat Medan Perang (TAC THUNDER): Ini adalah kampanye simulasi taktis udara yang konvensional. Ini membantu dalam menganalisis posisi kekuatan. Pilihan peralatan alternatif dan taktik di medan perang (lihat Oswalt 1993).(ix) TAC WARRIOR: Ini adalah model perang udara taktis yang dikembangkan oleh Angkatan Udara Amerika Serikat dengan tujuan untuk menentukan pilihan senjata dan keputusan struktur kekuatan seperti penyebaran kekuatan terhadap struktur kekuatan yang diberikan. Ini adalah simulasi komputer yang besar dan rumit, gambaran matematis yang menjadi pertemuan antara dua kekuatan udara taktis dalam operasi medan perang. Proses deteksi oleh radar Kontrol Darat Intercept(GCI), radar penghalang, pencarian visual dan AWACS juga dijadikan model. Ini adalah model hirarkis, dimana banyak input yang tergantung pada satu set model resolusi tinggi. Terdapat model masukan dan proses yang termasuk efektifitas udara-ke-udara, efektifitas udara-ke-darat, ORBAT dan skenario, data pemeliharaan dan geseskan SAM. Output termasuk ringkasan kumulatif serangan mendadak dari CAS yang diterbangkan, AFVs hancur, divisi lapis baja di serang dan sejumlah keterlibatan peledakan pesawat di udara-ke-udara, darat ke-udara dan udara-ke-darat. Rincian dapat dilihat pada Hoeber (1981).
(x) Model Peperangan Taktis(TACWAR): Dikembangkan oleh lembaga Analisis Pertahanan, itu adalah model pada level medan perang konvensional, perang nuklir dan kimia. Model ini dikembangkan pada tahun 1978 diikuti sejumlah model perang tingkat dunia seperti ATLAS. IDAGAM, VEKTOR. LULEJIAN dan CEM. Ini adalah simulasi komputer yang benar-benar otomatis. Seperti dalam semua
model pada tingkat dunia. TACWAR termasuk database dari pasukan dan senjata, organisasi dunia dan daerah. Ini beroperasi pada lokasi tetap dalam suatu siklus penilaian, mengalokasikan pasukan sebagaimana ditentukan oleh pengguna dan menganggap keseluruhan pengaruh misi pesawat, pertempuran darat hingga ke tingkat divisi, supplai ulang, penguatan kembali dan penggantian. Hal ini berbeda dari model tingkat dunia lainnya mengenai penggunaan senjata konvensional atau kimia atau nuklir, target akuisisi sub-model, penilaian kerusakan dan jumlah korban tewas maupun luka dari serangan nuklir dan kimia. Itu tidak secara eksplisit termasuk C3I dan kemampuan EW. Rincian menegani ini bisa di lihat dalam Hoeber (1981).(xi) Model Simulasi Satuan Pertempuran Kecil (SUBSIM): Dikembangkan oleh Lembaga Penelitian Pertahanan Denmark, itu adalah peristiwa penting, keputusan otomatis Monte Carlo game yang diimplementasikan pada VAX 8650 dengan menggunakan FORTRAN-77. Ini telah merinci deskripsi berdasarkan pada 50 m dengan rintangan yang ditumpangkan. Menggunakan pemodelan medan untuk garis atau alat perhitungan dan untuk perhitungan daerah sasaran yang disajikan. Daerah pertempuran terbatas pada 3 x 6 km yang cukup untuk satu kekuatan batalion dimana kekuatan ini telah cukup untuk menyerang satu kekuatan pertahanan.
Game ini menggabungkan visual, inframerah dekat dan model deteksi inframerah FNR. pengaruh asap juga diperhitungkan. Setiap unit menyerang mengikuti rute tetap yang diijinkan oleh medan yang didefinisikan oleh poli-line hingga 16 kaki, masing-masing kaki dengan kecepatan tertentu. Penyerang dapat berhenti di setiap titik balik atau mungkin hanya berhenti pada titik-titik yang memberikan dia beberapa penutup. Penyerang ketika menghadapi tembakan musuh dapat mencari penutup di titik luar rute tetapnya. Jika penutup diizinkan, penyerang dapat mencari penutup di titik luar rute tetap dimana rute secara otomatis dihasilkan.Posisi Unit diperbarui dengan interval waktu yang tetap. Semua unit bertahan bisa menggeser posisi mereka, dipilih secara acak atau dipilih secara berurutan. Keputusan keterlibatan dapat dibuat pada interval waktu yang tetap, baik oleh otonom atau dengan pengendalian penembakan yang terintegrasi. Model ini dapat mensimulasikan senjata api langsung. Untuk setiap putaran ditembak. Hasilnya disimpulkan dalam hal membunuh, menembak tanpa membunuh atau meleset. Tembak langsung juga termasuk dalam permainan. Game ini diteruskan sampai satu sisi atau yang lain memenuhi Kriteria penghentian atau sampai waktu pertandingan maksimum telah berlalu.
(xii) KOSMOS: Ini adalah model simulasi pertempuran yang dikembangkan oleh Institut untuk Sistem Terapan dan Riset Operasi (IASFOR) dari Federal Angkatan Bersenjata University, Munich. Model ini telah dirancang sebagai alat untuk penelitian eksperimental pada kebutuhan pemodelan untuk analisis tempur, implikasi dari akuisisi beberapa senjata dan dukungan sistem pada stabilitas di kawasan itu (lihat bab 12). doktrin taktis, komando dan kontrol kondisi dan metode agregat untuk menghasilkan input data untuk model resolusi rendah.Model ini menggunakan simulasi-event dilapiskan pada langkah berdasar pada waktu. Gesekan, gerakan dan CsI dimodelkan melalui pendekatan deterministik dan / atau stokastik. Proses C2l dimodelkan secara detail dan pilihan dari manusia / mesin interaktif juga telah dipertahankan. Ini terdiri dari input, simulator dan evaluasi modul. Modul masukan membantu dalam input data dan perubahan aturan yang mendasari proses C2, memberikan dukungan grafis untuk pengembangan rencana operasional, input data uji untuk kebenaran dan menafsirkan data masukan untuk meninjau eksperimen. Modul simulator melakukan eksperimen dan menghasilkan dokumen rinci mengenai semua peristiwa yang terjadi selama setiap simulasi dijalankan. Modul simulator terdiri dari empat model dasar berikut:
(a) Model Engagement: Ini merupakan deskripsi fungsional dari gesekan dan gerakan objek simulasi
(b) Model Reconnaissance: Ini mensimulasikan kegiatan dari sistem sensor (c) Model Komunikasi: Ini menggambarkan keterlambatan dan / atau gangguan dalam
pengiriman order, pesan pengintaian dan indikator situasi antara objek simulasi (d) Model C21: Ini mengontrol keterlibatan, pengintaian dan model komunikasi melalui
aturan.
Modul evaluasi pasca-prosesor yang memungkinkan untuk agregat , hasil dalam tabel dan bentuk grafik.
(xiii) Trend Indikasi dan Analisis Model untuk Sistem Terbuka (TRIAMOS): Ini adalah Jerman, model berbasis PC yang dapat diperpanjang pada setiap IBM yang kompatibel 3.861.486 PC dengan kartu VGA. Ini adalah model simulasi deterministik berdasarkan waktu yang dikembangkan untuk menyelidiki saling ketergantungan dari berbagai sistem senjata dan unit-unit tempur pada perilaku sistem yang lengkap. Hal ini juga dapat digunakan untuk mengembangkan skenario. Hal ini umumnya digunakan sebagai model dua pihak tetapi memungkinkan lebih dari dua pihak. Skenario yang diwakili oleh unsur-unsur penyebaran atau pertempuran. Menggabungkan unsur-unsur topografi dan infrastruktur seperti sungai, jalan, danau, hutan, daerah penduduk, perbatasan, ladang ranjau dan kawasan lindung oleh sistem pertahanan udara berdasarkan udara atau darat.
Tempur dimulai antara pihak ketika kondisi tertentu terpenuhi. Persamaan Lanchester yang telah dimodifikasi digunakan untuk menghitung jumlah kerugian. Eksekusi dapat terganggu setelah waktu simulasi yang ditentukan dan fitur representasi dapat diubah. Informasi mengenai berbagai elemen tempur juga dapat diperoleh dengan cara menu pop-up. Simulasi yang sedang berjalan dievaluasi menggunakan ilustrasi grafis. Hasil mencakup sejarah singkat dari peristiwa-peristiwa penting dalam simulasi, kerugian dan sukses dari setiap jenis atau elemen pertempuran, skor pembunuh-korban dan nilai-nilai pertukaran rasio.
Untuk rincian dari paket simulasi SUBSIM, KOSMOS dan TRIAMOS, referensi dibuat dalam Christensen (1995).
Seiring dengan simulasi paket perangkat lunak yang dibahas di atas, simulasi telah diterapkan untuk memecahkan berbagai masalah khusus. Beberapa penelitian yang berkaitan dengan logistik dari pengisian kelompok kapal perang angkatan laut di laut (williams eta !. 1989), perhitungan probabilitas target akuisisi (Holliday 1990), kerentanan pangkalan udara terhadap bom anti-runway khusus (Hagenson dan Ljogodt 1987) , desain struktur dukungan logistik untuk presisi lokasi sistem pemogokan (clark ea !. 1 986), evaluasi sistem pertahanan udara dari patroli cepat skuadron kapal (Amundsen 1986), sistem pertahanan udara terhadap helikopter (Chalklen dan Smith 1989), perang terhadap kebutuhan gudang senjata (Holder dan Gittins 1989), perlombaan senjata USA-Uni Soviet (Ward 1984), evaluasi kinerja sistem senjata tank dan subsistem sebelum pengembangan perangkat keras (Cushman 1973). memprediksi pengapian bahan bakar pada kantong pesawat yang kering, bahan bakar pesawat tempur yang disebabkan oleh ledakan sebuah proyektil pembakar eksplosif tingkat tinggi yang menggunakan simulasi sistem kontinyu (Crawrord dan Bauer 1994), perencanaan misi (Lee dan Fishwick 1994) dan beberapa situasi taktis dianggap sebagai kemerosotan (i988 ), Dockery el a !. (i97s), Park (i98o) dan Knapp ego !. (1987).Penggunaan terbesar dari simulasi tampaknya terdapat dalam pengembangan komputer pelatihan simulasi-dukungan atau pelatihan permainan perang (Hartley 1993). sementara setiap layanan memiliki pelatihan permainan perang untuk memenuhi kebutuhannya (lihat bab 4), pengembangan pelatihan permainan perang untuk memenuhi operasi bersama menimbulkan tantangan bagi komunitas simulasi. Perkembangan Realitas virtual (Moshell et a !. 1993 dan US Department Commerce 1994) dan Jaringan distribusi membawa realisme lebih untuk mendukung latihan besar bersama. kita akan membahas topik penting dari permainan perang di bab berikutnya.





























