Embed Size (px)
Citation preview

1
Robotics
Technology

2
Irish Mini Sumo Robot Competition Explained

3
Educational AimsTo develop student interest and expertise in the area of AppliedControl through building autonomous Mini Sumo Robots and subsequently competing them against each other in both school based and national Mini Sumo Robot Tournaments.
Students will develop skills in the following areas:
•Design
•Material Processing
•Mechanisms
•Robotics
•PIC Control
•Mathematics
•GENIE PIC Programming Software

4
1.Competition Overview

5
What is Robot Sumo?Robot-Sumo is a sport in which two robots attempt to push each other out of a circle (in a similar fashion to the sport ofSumo). The robots used in this competition are often called Sumobots.
The engineering challenges are for the robot to find its opponent (usually accomplished with infrared or ultra-sonic sensors) and to push it out of the flat arena. A robot should also avoid leaving the arena, usually by means of a sensor that detects the edge.
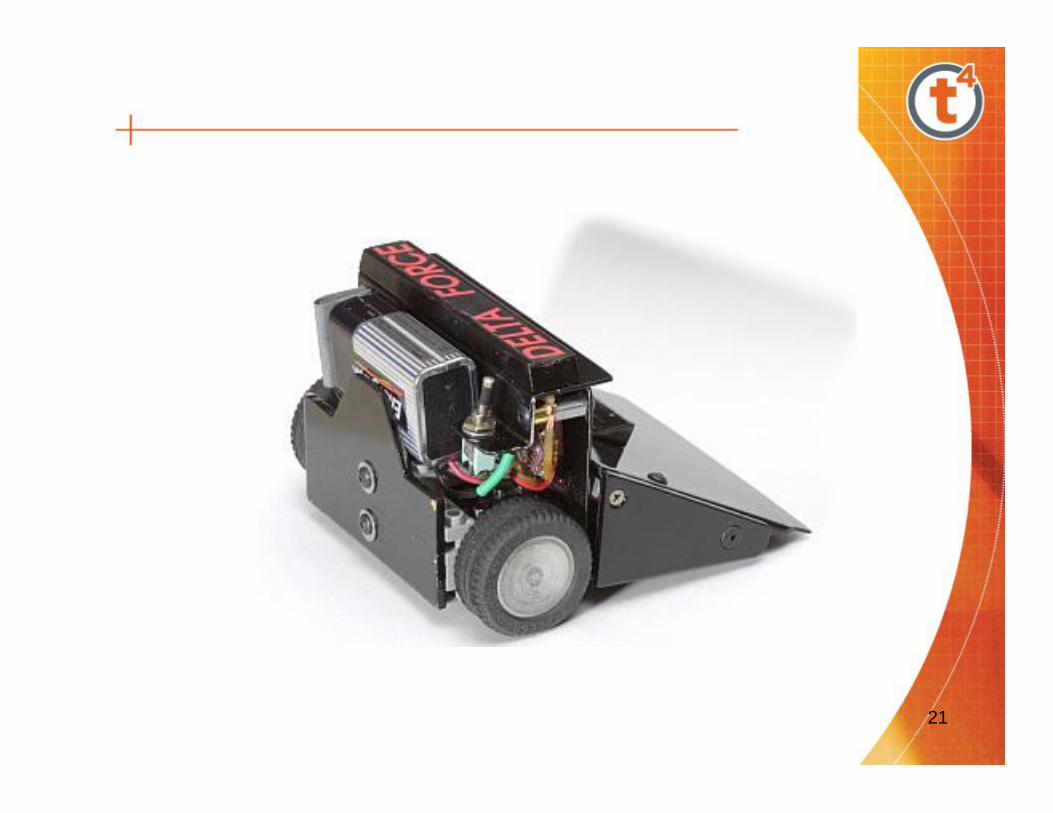
The most common "weapon" used in a Sumobot competition is an angled blade at the front of the robot, usually tilted at about a 45 degree angle towards the back of the robot. This blade may have an adjustable height for different tactics.
6
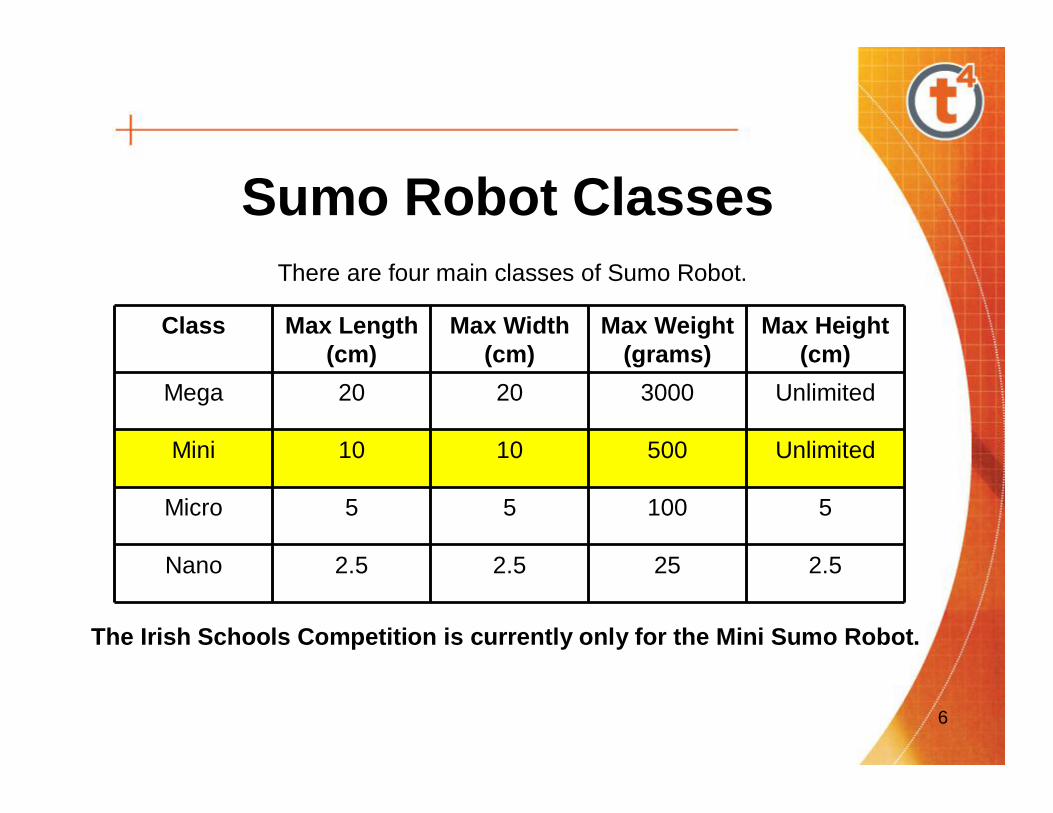
Sumo Robot ClassesThere are four main classes of Sumo Robot.
Class Max Length (cm)
Max Width (cm)
Max Weight (grams)
Max Height (cm)
Mega 20 20 3000 Unlimited
Mini 10 10 500 Unlimited
Micro 5 5 100 5
Nano 2.5 2.5 25 2.5
The Irish Schools Competition is currently only for the Mini Sumo Robot.

7
Ring Name
Ring Diameter
Ring Height
White Border Width
Start Line Width
Start Line Length
Start Line From Center
Mini Sumo
77 cm 2.5 cm 2.5 cm 1 cm 10 cm 5cm
Mini Sumo Robot Competition Ring
Schools should make a similar ring from sprayed MDF etc to test their Mini Sumo Robots.

8
A mini-sumo robot must be able to do the following:
• Stay in the ring: Survive
• Look for the opponent: Hunt
• Aim at the opponent: Target
• Push the opponent: Attack
Irish Mini Sumo Robot Competition

9
State Description ActionsSURVIVE The robot enters this state
when it detects the table edge using its LDR sensor(s)
Its goal is to survive by not going off the table
The robot rotates away from the sensor that sensed the edge to face back toward the centre of the table
Rotate away from the line sensor thatsensed the edge.
Switch back to HUNT state when rotation iscomplete.

10
State Description ActionsHUNT The robot is not at the edge of
the table but hasn’t sensed the opponent
The robot moves around in a set pattern so its infra red range sensor(s) will sweep across the ring in the hope of sensing the opponent
Switch to SURVIVEstate if table edge isdetected
Switch to TARGETstate if range sensors indicate an objectahead
Otherwise, drive in the set pattern
11
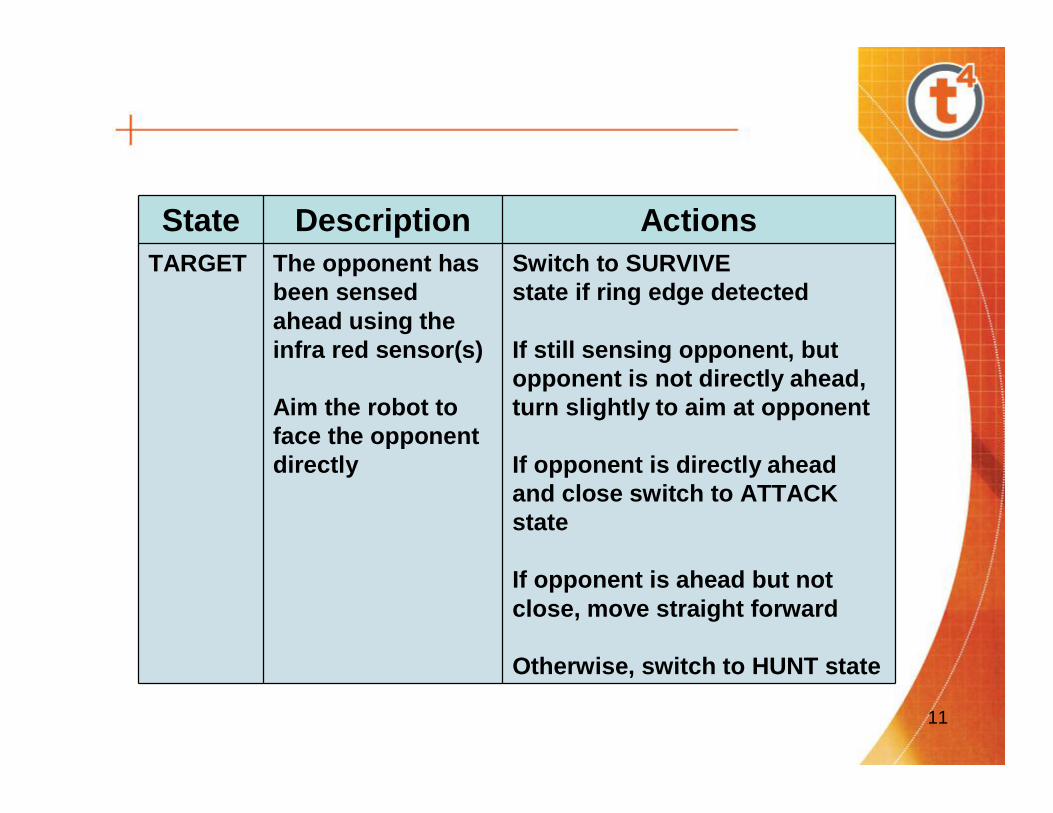
State Description ActionsTARGET The opponent has
been sensed ahead using the infra red sensor(s)
Aim the robot to face the opponent directly
Switch to SURVIVEstate if ring edge detected
If still sensing opponent, butopponent is not directly ahead, turn slightly to aim at opponent
If opponent is directly ahead and close switch to ATTACK state
If opponent is ahead but not close, move straight forward
Otherwise, switch to HUNT state

12
State Description ActionsATTACK The opponent has been
found and aiming is complete.
Drive straight ahead at full power to push the opponent off the table.
1. Switch to SURVIVEstate if table edgedetected.
2. Otherwise, drivestraight forward at fullpower.

13
Mini Sumo Robot Examples

14

15

16

17

18

19

20
21

22

23
This is a SolidWorks render of a Example 2 Mini Sumo Robot.
Instructions for the manufacture of the sample PDST mini sumo and this robot are available in folder 3.Mini Sumo Robot Manufacture

24Rear view of the SolidWorks render.
25
Required Components for Irish Mini Sumo Robot
Competition

26
In order to minimise costs for and ensure fairness and equality during competition, specifications for the following main components have been created:
•Motors
•PIC Control Board
•Edge Sensing LDR
•Infra Red Distance Sensor

27
Specified Motors
http://www.rapidonline.com/Electrical-Power/Fans-Motors/Gearboxes/120:1-Inline-motor-and-gearbox/81728/kw/motor
This economy motorised gearbox is fitted with a 3 to 12V DC motor.
The output shaft is 5.5mm diameter and 9mm long with 2 flats.
It is available from Rapid Electronics.
Click on the link below for details.

28
Specified Motors
http://www.rapidonline.com/Electrical-Power/Fans-Motors/Gearboxes/Worm-drive-gearbox-with-motor/64483/kw/Motor+and+gearbox+1%3a220
A robust worm-drive gearbox powered by an MM28 motor (included).
Most suitable for applications where an easy to fit, high torque output is required.
Ideal for student based projects including robots and buggies
Click on the link below for details.

29
PIC Control BoardThe GENIE E18 Motor Board must be used to control the Mini Sumo Robot.
A kit containing all necessary components to build this board can be purchased at:http://www.rapidonline.com/sku/Electronic-Components/Integrated-Circuits/Genie/GENIE-18-pin-microcontroller-system-kits/124896/13-6016
The required GENIE Design studio software can be downloaded freefrom the GENIE website at:http://www.genieonline.com/
The folder labelled 4. Using GENIE Design Studio to Program a Mini Sumo Robot contains information on using the software along with example videos of student Mini Sumo Robots in action.

30
GENIE E18 Motor Board
31
Edge Sensing LDRs
A compact low cost cadmium sulphide light dependent resistor (LDR) housed in a small package.
Click on the link below for details of this or similar LDRs:
http://www.rapidonline.com/Electronic-Components/Optoelectronics/Photodetectors/Miniature-light-dependent-resistor/34796/kw/ldr

32
Infra Red Distance SensorThe GP2Y0A21 Sharp distance sensor is a great way to add obstacle avoidance or motion sensing to your robot or any other project.
With built in emitter and receivers, a detection range of 10 to 80cm and an analogue voltage indicating the distance, this sensor is very easy to use.
Click on the link below for details of the sensor and 3 pin connecting cable.
http://www.pololu.com/catalog/product/136/pictures
http://www.pololu.com/catalog/product/117

33
If any school is interested in entering the 2013 Inaugural Irish Mini Sumo Robot Tournament which will be held in Galway at a date to be decided please contact:
Declan Askin
St. Gerald’s College
Castlebar
Co. Mayo
087 4181690
www.geralds.ie