Embed Size (px)
Citation preview

1
DISCRETE EVENT SYSTEM THEORYAND SIMULATION
USING SIMEVENTSFOR TRANSACTION LEVEL MODELING
C. G. CassandrasCenter for Information and Systems Engineering (CISE)Boston [email protected]://vita.bu.edu/cgc
Christos G. Cassandras CODES Lab. - Boston University
OUTLINE
Christos G. Cassandras CODES Lab. - Boston University
Transaction-based systems as Discrete Event Systems (DES)
Event-driven vs Time-driven behavior
Why not to use time-driven models for DES…
DES examples – Queueing Systems
DES modeling frameworks and simulation
SIMEVENTS basics

2
DISCRETE EVENT SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University
“Transaction-based” systems exhibit event-driven behavior:System state changes only as a result of discrete events– not time
Events: “transaction starts”, “transaction ends”, etc.
Event-driven dynamics define the class ofDISCRETE EVENT SYSTEMS (DES) such as…
Manufacturing Systems Communication Networks (e.g., Internet)ComputersC3I (military) systemsTraffic systems - land, sea, airLogistics, business processesSoftware
TIME-DRIVEN SYSTEM
EVENT-DRIVEN SYSTEM
TIME-DRIVEN vs EVENT-DRIVEN SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University
STATES
TIMEt
STATE SPACE:
X = ℜ
DYNAMICS:
( )& ,x f x t=
x(t)
STATES
s1
s2
s3
s4
TIMEt
STATE SPACE:
{ }X s s s s= 1 2 3 4, , ,
DYNAMICS:
( )exfx ,'=t2
e2
x(t)
t3 t4 t5
e3 e4 e5EVENTS
t1
e1

3
TIME-DRIVEN EVENT-DRIVEN
REAL VALUED:Position, Velocity,Flow, Volume,Voltage, Current
INTEGER VALUED:Number of packets,Number of partsSYMBOLS:Traffic light: green, red,Processor status: on, off
TYPICALSTATES
CLOCK
Continuouslychanging
Discontinuouslychanging with eachEVENT
TIME-DRIVEN vs EVENT-DRIVEN SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED
State variables are both discrete and continuouscannot rely on calculus alone;symbols vs. variables
Lack of event synchronization
Inherent uncertainties (events cannot be fully predictable)need accurate stochastic models
Inherent complexity (e.g., too many operating modes)
need to live without simple analytical expressions; combinatorial explosion;need new ‘paradigms’ and abstraction levels
time cannot drive state transitions;need new mathematical models for state dynamics
MAIN FEATURES OF EVENT-DRIVEN SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University

4
Wasted clock ticks
More wasted clock ticks
Even more wasted clock ticks…
INCREASING TIM
E GRANULARITY
Indistinguishable events
SYNCHRONOUS vs ASYNCHRONOUS BEHAVIOR
Christos G. Cassandras CODES Lab. - Boston University
SYNCHRONOUS:
CLOCK drives all state updates
No event within a “clock tick” ⇒ no state transition
Two or more events within a “clock tick” ⇒ need increased time granularity
ASYNCHRONOUS:
EVENTS drive all state updates
Clock is controlled by events ⇒ clock is fixed until next event
SYNCHRONOUS vs ASYNCHRONOUS BEHAVIOR
Christos G. Cassandras CODES Lab. - Boston University

5
WHY NOT TO USE TIME-DRIVEN MODELS FOR DES
Christos G. Cassandras CODES Lab. - Boston University
A few reasons for NOT using a time-driven engine to model event-driven systems…
1. Asynchronous behavior causinginefficiencies and errors in computation
2. Need to model imperative semantics
3. Need to model concurrency
Simple computation example in a time-driven environment:
x + yxy
xy
TIME
TIME
Time-driven (synchronous) implementation:- Sum repeatedly evaluated unnecessarily- When evaluation is actually needed,
it is done at the wrong times !
t1 t2
Asynchronous
events
TIME-DRIVEN vs EVENT-DRIVEN COMPUTATION
Christos G. Cassandras CODES Lab. - Boston University

6
TIME-DRIVEN vs EVENT-DRIVEN COMPUTATION
Christos G. Cassandras CODES Lab. - Boston University
DECLARATIVE vs. IMPERATIVE SEMANTICS
Christos G. Cassandras CODES Lab. - Boston University
TIME-DRIVEN SYSTEM– Model based on diff. equations– Declarative semantics– equation ⇒ variables must satisfy a constraint
EVENT-DRIVEN SYSTEM– Model based on “event calendar”– Imperative semantics– equation ⇒ strict assignment

7
An event-driven model must allow a variable to takemultiple values at each point in time.
Time-driven models are not intended to operate in this manner.
EVENT CONCURRENCY
Christos G. Cassandras CODES Lab. - Boston University
At EVENT TIME t :- e1 disables process…- … and resets state,- e2 re-enables process
EVENT
Time-drivenpoint of view(final effect at tbecause of e2)
e1 e2
t Event-drivenpoint of view(effects of bothe1 and e2processed at t)
EVENT CONCURRENCY
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED

8
QUEUE SERVER
Customer(Transaction)Arrivals
Customer(Transaction)Departures
Typical EVENTS: a = arrival, d = departure
E = {a, d}
Typical STATES: x = number in system (0,1,2, …)
X = {0, 1, 2, …}
DES EXAMPLES: A SIMPLE QUEUEING SYSTEM
Christos G. Cassandras CODES Lab. - Boston University
E = {a, d, r1, r2, d1, d2}
X = {(xCPU, x1, x2): xCPU, x1, x2 ≥ 0}
CPU
Jobs
JobDepartures
1
2
DES EXAMPLES: A COMPUTER SYSTEM
Christos G. Cassandras CODES Lab. - Boston University
9
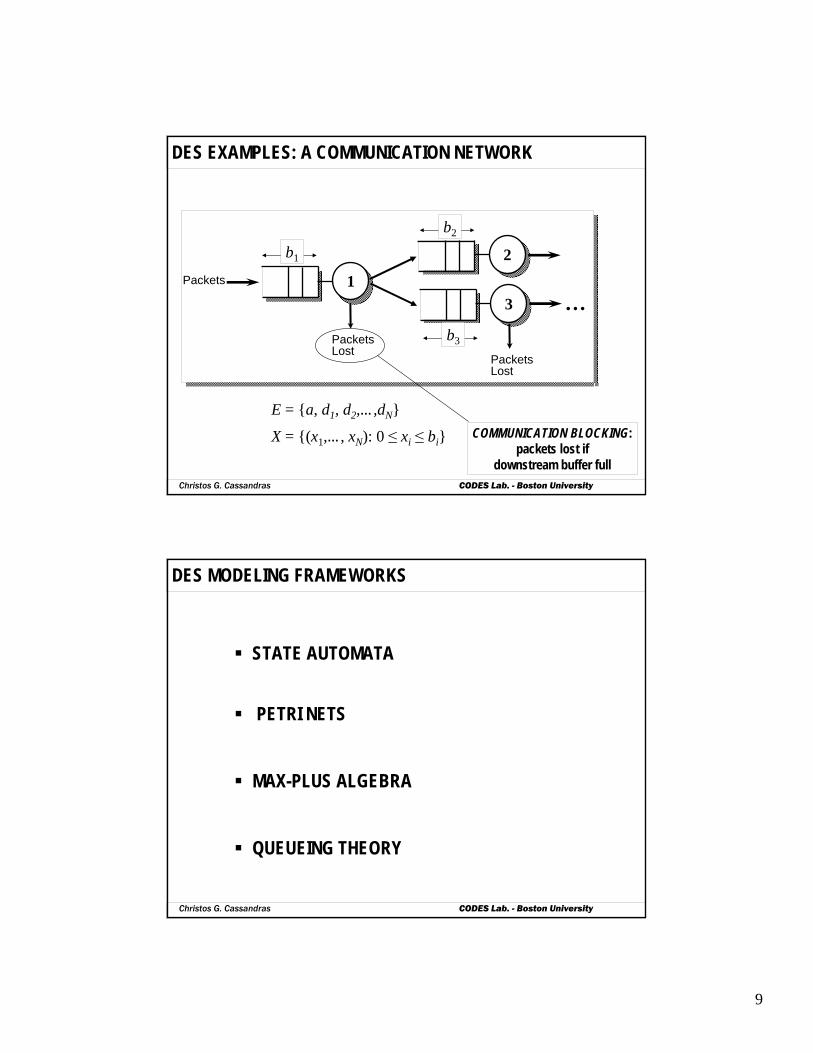
E = {a, d1, d2,…,dN}
X = {(x1,…, xN): 0 ≤ xi ≤ bi}
1Packets
2
3
PacketsLost
PacketsLost
…
b1
b2
b3
COMMUNICATION BLOCKING:packets lost if
downstream buffer full
DES EXAMPLES: A COMMUNICATION NETWORK
Christos G. Cassandras CODES Lab. - Boston University
DES MODELING FRAMEWORKS
Christos G. Cassandras CODES Lab. - Boston University
STATE AUTOMATA
PETRI NETS
MAX-PLUS ALGEBRA
QUEUEING THEORY

10
AUTOMATON: (E, X, Γ, f, x0)
Ε : Event Set
X : State Space
{ }e e1 2, ,K { }x x1 2, ,K( )f x e x, '=
Γ(x) : Set of feasible or enabled events at state x
x X0 ∈x0 : Initial State,
f X E X: × →( )e x∉Γ
f : State Transition Function(undefined for events )
STATE AUTOMATA
Christos G. Cassandras CODES Lab. - Boston University
Add a Clock Structure V to the automaton: (E, X, Γ, f, x0 , V)where:
and vi is a Clock or Lifetime sequence: one for each event i
{ }V v= ∈i i E :
{ }K,, 21 iii vv=v
Need an internal mechanism to determineNEXT EVENT e´ and hence
NEXT STATE ( )x f x e' , '=
{ }x x1 2, ,K( )f x e x, ' '=
v1
vN
M
NEXT EVENT
TIMED AUTOMATON
Christos G. Cassandras CODES Lab. - Boston University

11
CURRENT STATE
CURRENT EVENT
CURRENT EVENT TIME
Associate aCLOCK VALUE/RESIDUAL LIFETIME yi
with each feasible event ( )i x∈Γ
x∈X with feasible event set Γ(x)
e that caused transition into x
t associated with e
HOW THE TIMED AUTOMATON WORKS
Christos G. Cassandras CODES Lab. - Boston University
NEXT/TRIGGERING EVENT e' :
( ){ }i
xiye
Γ∈= minarg'
NEXT EVENT TIME t' :
( ){ }i
xiyy
ytt
�∈=
+=min* :where
*'
NEXT STATE x' :
( )x f x e' , '=
HOW THE TIMED AUTOMATON WORKS
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED

12
Determine new CLOCK VALUESfor every event ( )i x∈ Γ
′yi
( ) ( )( ) ( ){ }
iv
otherwise
exxiv
eixixiyy
y
ij
ij
i
i
event for lifetimenew :where
0
, ,*
=
⎪⎩
⎪⎨
⎧′−−′∈
′≠∈′∈−=′ ΓΓ
ΓΓ
{ }x x1 2, ,K( ) }{minarg' ,',')(
ixi
yeexfxΓ∈
==( )Vx,,' ygy =
v1
vNM
EVENT CLOCKS
ARE STATE VARIABLES
HOW THE TIMED AUTOMATON WORKS
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED
QUEUE SERVER
ArrivalEvents
DepartureEvents
{ }{ }K,2,1,0
,
==
X
daE
( )f x ex e a
x e d x,
,′ =
+ ′ =− ′ = >
⎧⎨⎩
1
1 0
{ } { }KK ,, ,,, :input Given 2121 dddaaa vvvv == vv
( ) { }( ) { }a
xdax
=>=
0
0 allfor ,,
ΓΓ
TIMED AUTOMATON - EXAMPLE
Christos G. Cassandras CODES Lab. - Boston University

13
t0
x0 = 0
a
e1 = a
x0 = 1
t1
ad
e2 = a
x0 = 2
t2
ad
e3 = a
x0 = 3
t3
ad
x0 = 2
e4 = d
t4
TIMED AUTOMATON – A TYPICAL STATE TRAJECTORY
Christos G. Cassandras CODES Lab. - Boston University
Same idea with the Clock Structure consisting of Stochastic Processes
Associate with each event i a Lifetime Distribution based onwhich vi is generated
Generalized Semi-Markov Process(GSMP)
In a simulator, vi is generated through a pseudorandom number generator
STOCHASTIC TIMED AUTOMATON
Christos G. Cassandras CODES Lab. - Boston University

14
Proceed by example and contrast to Timed Automaton model...
EVENTS: a = arrival, d = departure
E = {a, d}
STATES: x = number in system (0,1,2, ...)
X = {0, 1, 2, ...}
PETRI NETS
Christos G. Cassandras CODES Lab. - Boston University
QUEUE SERVER
ArrivalEvents
DepartureEvents
TRANSITIONS (EVENTS):
- a : Customer arrives- s : Service starts- d : Customer departs
a
s
d
Q I
B
va
vd
PLACES (CONDITIONS):
- Q : Queue not empty- I : Server idle- B : Server busy
TRANSITION TIMING:
- a → va = {va,1, va,2, ...}- s → vs = 0 (no delay)
- d → vd = {vd,1, vd,2, ...}
Transition firesafter
specified delay
PETRI NETS
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED

15
ak : kth arrival timesk : kth service start timedk : kth departure time
πQ,k : kth time Q gets token
πI,k : kth time I gets token
πB,k : kth time B gets token
πππ
Q k k
I k k
B k k
a
d
s
,
,
,
=
==
−1
[ ]d a d v kk k k d k= + =−max , ,.1 1 2, K
a
s
d
Q I
B
va
vd
[ ]a a v
s
d v
k k a k
k Q k I k
k B k d k
= +
=
= +
−1 ,
, ,
, .
max ,π π
π
PETRI NETS
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED
ADDITION:
MULTIPLICATION:[ ]a b a b
a b a b
⊕ =⊗ = +
m a x ,
From Petri net model:
[ ]a a v a
d a v d v d
k k a k
k k a k k d k
= + =
= + + =
−
− −
1 0
1 1 0
0
0
,
, .max ,
Fix: v C v C ka k a d k d, , , ,= , = f o r a l l = 1 2 K
Equations become: ( ) ( )( ) ( )
a a C d L L
d a C d C
k k a k-
k k d k- d
+ = ⊗ ⊕ ⊗ − − = −∞
= ⊗ ⊕ ⊗1 1
1
MAX-PLUS ALGEBRA
Christos G. Cassandras CODES Lab. - Boston University

16
In matrix form:a
d
C L
C C
a
dk
k
a
d d
k
k
+
−
⎡
⎣⎢
⎤
⎦⎥ =
−⎡
⎣⎢
⎤
⎦⎥⎡
⎣⎢
⎤
⎦⎥
1
1
Define:x Ak
k
k
a
d d
a
d
C L
C C=
⎡
⎣⎢
⎤
⎦⎥ =
−⎡
⎣⎢
⎤
⎦⎥
+ 1,
Get a “linear” system - in the max-plus sense:
x A x xk kaC
+ = =⎡
⎣⎢
⎤
⎦⎥1 0 0
,
MAX-PLUS ALGEBRA
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED
Queueing model:
A(t)B(t)
x(t)
Specify A(t) and B(t) as stochastic processes
Obtain the probability distribution of x(t):
πk(t) = P[x(t) = k], k = 0,1,2...
Many performance metrics of interest are expressed interms of πk(t)
QUEUEING THEORY
Christos G. Cassandras CODES Lab. - Boston University
CONTINUED

17
Need “simple” models for A(t) and/or B(t) (e.g., Poisson processes)
Even for the simplest model, assuming the simplestpossible A(t), B(t): πk(t) is solution of a modified Bessel function !⇒ only steady-state solutions generally possible
For queueing networks, only a limited class of models can be solved⇒ limited complexity can be handled
Queueing theory is intended to be descriptive, not prescriptive, i.e., given a model and control policies:
DO ANALYSIS → OBTAIN PERFORMANCE (if possible)
→ CHECK IF OBJECTIVES ARE MET
but not: given objectives, what is the “best” control policy?
QUEUEING THEORY
Christos G. Cassandras CODES Lab. - Boston University
…is simply a computer-based implementation of the DES state trajectory generation mechanism described so far
STATEx TIME
t
RANDOM VARIATEGENERATOR
SCHEDULEDEVENT LIST
e2 t2
...
e1 t1UPDATE TIME
t' = t1UPDATE STATE
x' = f(x,e1)
x'
INITIALIZE
DELETE INFEASIBLE(ek, tk)
x'
ADD NEW FEASIBLE(ek, t' +vk)
AND RE-ORDER
t'
new event lifetimes vk
t'
DISCRETE EVENT SIMULATION
Christos G. Cassandras CODES Lab. - Boston University

18
t0
x0 = 0
e1 = a
x0 = 1
t1
e2 = a
x0 = 2
t2
e3 = a
x0 = 3
t3
x0 = 2
t1a
t4d
t2a
x0 = 2
e4 = d
t4
t4d
t3a
t5a
t4d SCHEDULEDEVENT LIST
(EVENT CALENDAR)
SCHEDULEDEVENT
SCHEDULEDTIME
DISCRETE EVENT SIMULATION - EXAMPLE
Christos G. Cassandras CODES Lab. - Boston University
DISCRETE EVENT SIMULATIONFOR TRANSACTION-BASED SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University
General state-based models do not exploit structure of transaction-based system
Use queueing model paradigm instead with modeling“blocks” such as “queues”, “servers”, “switches”, etc.
Evaluate system PERFORMANCE through standard metrics:
SIMEVENTS
ThroughputMean Response Time
Prob. of meeting real-time constraintsProcessor Utilizations
etc…

19
STATES
TIMEt
x(t)TIME-DRIVEN SYSTEM
Simulink
Can also handle some “events”(e.g., level crossings)
STATES
TIMEt
Level-Crossing Events
SIMULINK FOR TIME-DRIVEN SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University
STATES
s1
s2
s3
s4
TIMEtt2
e2
x(t)
t3 t4 t5
e3 e4 e5EVENTS
t1
e1
EVENT-DRIVEN SYSTEM
STATES
s1
s2
s3
s4
TIMEtt2
e2
x(t)
t3 t4 t5
e3 e4 e5EVENTS
t1
e1
EVENT-DRIVEN SYSTEM
STATES
TIMEt
x(t)TIME-DRIVEN SYSTEM
+
HYBRID SYSTEM
Simulink
SimEvents
SIMEVENTS FOR EVENT-DRIVEN SYSTEMS
Christos G. Cassandras CODES Lab. - Boston University

20
Systems modeled at transaction level
Model semantics are event-based
Time is not treated as independent variable
SIMEVENTS Model
DISCRETE EVENT SIMULATION WITH SIMEVENTS
Christos G. Cassandras CODES Lab. - Boston University
http://www.mathworks.com/products/simevents/
SIMEVENTS info:
Entities and Attributes
Queues and Servers
Routing Entities
Accessing Statistics
Interfaces with Simulinkand Stateflow
Underlying Engine: The EVENT CALENDAR
SIMEVENTS COMPONENTS
Christos G. Cassandras CODES Lab. - Boston University

21
ENTITIES– Abstraction of something that requires service: TRANSACTIONS– Move through queues, servers, gates, and switches
ATTRIBUTES– Data carried by entities (e.g., Type, Destination)
SimulinkSignalLine
SIMEVENTSEntity Path
ENTITIES AND ATTRIBUTES
Christos G. Cassandras CODES Lab. - Boston University
QUEUE-SERVER pair models delays and storage of entities– Service time of server models processing time of entities
– Queue (of possibly finite capacity) models waiting, storage
BLOCKING – Entities advance ONLY when there is a place to go
EVENT PRIORITIES - control execution order of concurrent eventse.g., two entities simultaneously accessing a server
DELAY
QUEUES AND SERVERS
Christos G. Cassandras CODES Lab. - Boston University

22
Various network topologiescan be created
– Merge entity paths
– SCHEDULING: Selectentity from input path
– ROUTING: Select outputpath for entity
– Replicating entities
Logic for the control of entity paths can be complicated, but the use of embedded MATLAB blocks makes it easy and flexible
ROUTING ENTITIES
Christos G. Cassandras CODES Lab. - Boston University
Statistics– Number of entities departed– Average entity delay – Utilization– Average end to end delays
(using Timer blocks)– Number of Events
Statistics and states of blocks can be accessed by means of output signal ports PERFORMANCE ANALYSIS
Block states– Number of entities in block– Entity time in block– Pending Entity (blocking status)– Timer blocks – entity end to end
delay
STATISTICAL DATA COLLECTION
Christos G. Cassandras CODES Lab. - Boston University

23
Entities can be combined to create data structures treated as one entity– Resulting entity can maintain individual component structures for future extraction…– … or collapses so as to only maintain the data
Combining entities can be used to model synchronization
ENTITY COMBINING
Christos G. Cassandras CODES Lab. - Boston University
Attribute values can be vectors and N-dimensional arrays
Enables processing payloads of data which can represent audio, video, image, or any large aggregate data structure
VECTOR AND MATRIX ATTRIBUTES
Christos G. Cassandras CODES Lab. - Boston University

24
Discrete Event Subsystemblocks execute only at event times (whenever event is detected at an input port)
Multiple Event types:– Value Change– Trigger– Sample Hit– None
Example: adding two queue lengths
SimulinkTiming
SIMEVENTSTiming
DISCRETE EVENT SUBSYSTEM
Christos G. Cassandras CODES Lab. - Boston University
Function-calls, triggers, and value changes allow interfacing between SIMEVENTS and Simulink or Stateflow– SIMEVENTS can control Stateflow chart– Stateflow can control a SIMEVENTS block
INTERFACING WITH SIMULINK AND STATEFLOW
Christos G. Cassandras CODES Lab. - Boston University

25
Translate SIMEVENTS block events: – Entity movement– State change– 1 or 2 function calls– Enabled option
… into Function Calls:– Simulink Function-Call Subsystems– Embedded MATLAB Function block– Stateflow charts
… and back again:– Simulink function calls can trigger
SIMEVENTS blocks
EVENT TRANSLATORS
Christos G. Cassandras CODES Lab. - Boston University
Specify timing constraintson selected events or activities(e.g., amount of time a transactioncan wait to be executed beforeconsidered useless)
Timeout violation can triggerdesirable action in the model
TIMEOUT MODELING
Christos G. Cassandras CODES Lab. - Boston University

26
SIMEVENTS MODEL EXAMPLE
Christos G. Cassandras CODES Lab. - Boston University
• Cassandras and Lafortune, Introduction to Discrete Event Systems (2nd Edition), Springer, 2007
• David and Alla, Petri Nets and Grafcet: Tools for Modelling Discrete Event Systems, Prentice-Hall, 1992.
• Peterson, Petri Net Theory and the Modeling of Systems, Prentice Hall, 1981
• Glasserman and Yao, Monotone Structure in Discrete-Event Systems, Wiley, 1994
• Baccelli, Cohen, Olsder, and Quadrat, Synchronization and Linearity: An Algebra for Discrete Event Systems, Wiley, 1992
• Banks, J., and J.S. Carson, Discrete Event System Simulation, Prentice-Hall, Englewood Cliffs, NJ, 1984.
• Law, A.M., and W.D. Kelton, Simulation Modeling and Analysis, McGraw-Hill, New York, 1991.
• Zeigler, B.P., Theory of Modeling and Simulation, Wiley, New York, 1976.
REFERENCES ON DISCRETE EVENT SYSTEMSAND SIMULATION
Christos G. Cassandras CODES Lab. - Boston University

![[Introduction] - WordPress.com · · 2012-06-25Chapter - Introduction Discrete Structures Samujjwal Bhandari 2 Introduction Discrete Mathematics deals with discrete objects. Discrete](https://img.dokumen.tips/doc/110x75/5b18f6f47f8b9a32258c36c3/introduction-2012-06-25chapter-introduction-discrete-structures-samujjwal.jpg)










![CS317 File and Database Systemsmercury.pr.erau.edu/~siewerts/cs317/documents/... · Discrete Event Simulation - MATLAB SimEvents, SimPy, SystemC [Hardware/System Oriented] Sam Siewert](https://img.dokumen.tips/doc/110x75/5e81ba1430e18515736cdac2/cs317-file-and-database-siewertscs317documents-discrete-event-simulation.jpg)
















