-
7/27/2019 Partial Differential Equation.ppt
1/18
1
Definition of a PDE and Notation
A PDE is an equation with derivatives of at least twovariables
in it.
Let u be a function of x and y. There are several ways towrite a
PDE, e.g.,
The equations above are linear and first order. The order
isdetermined by the maximum number of derivatives of any
term. A nonlinear PDE has the solution times a partial
derivative
or a partial derivative raised to some power in it.
Mostinteresting problems are nonlinear and time dependent.
yuxuuu yx
//
-
7/27/2019 Partial Differential Equation.ppt
2/18
2
Characterization of Simple Second Order PDEs
Let
Then the type of PDE is determined by the discriminant
< 0 elliptic
= 0parabolic
> 0 hyperbolic
gfueuducubuau yxyyxyxx 2
acb 2
-
7/27/2019 Partial Differential Equation.ppt
3/18
3
Characterization of n Variable Second Order PDEs
A general linear PDE of order 2:
Assume symmetry in coefficients so that A = [ aij ] issymmetric.
Eig(A) are real. Let P and Z denote the
number of positive and zero eigenvalues of A.
Elliptic: Z = 0 and P = n or Z = 0 and P = 0..
Parabolic: Z > 0 (det(A) = 0). Hyperbolic: Z=0 and P = 1 or Z
= 0 and P = n-1.
Ultra hyperbolic: Z = 0 and 1 < P < n-1.
.11, dcuubua iji xin
ixxij
n
ji
-
7/27/2019 Partial Differential Equation.ppt
4/18
4
PDE Model Problems
Laplaces Equation (elliptic):
Heat Equation (parabolic):
Wave Equations (hyperbolic):
All problems can be mapped to one of these! in theory
0
0
0
0
yyxxtt
yxt
yyxxt
yyxx
uuu
uuu
uuu
uu
-
7/27/2019 Partial Differential Equation.ppt
5/18
5
Boundary and Initial Conditions,
Well and Ill Posedness
Boundary conditions on G GD U GN U GR.
Dirichlet: u = g on GD.
Neumann: un = g on GN.
Robin: au + b un = g on GR. Initial conditions at t=0.
U(t=0,x,y) = u0(x,y).
Well posed PDE if and only if
A solution to the problem exists. The solution is unique.
The solution depends continuously on the problem data.
Ill posed if not well posed.
-
7/27/2019 Partial Differential Equation.ppt
6/18
6
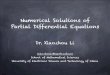
Example: Poisson Equation in 2D
uxxuyy = 1 in (0,1)2 ; u = 0 on (0,1)2 .
-
7/27/2019 Partial Differential Equation.ppt
7/18
7
Finite Whosiwhatsit Methods
There are three common methods of producing a finite
dimensional problem whose solution can be computed,
which approximates the solution of the original, infinite
dimensional problem:
Finite elements
Finite differences
Finite volumes
Each has its place, supporters, and detractors.
There are also other methods, e.g., collocation, spectral
methods, pseudo-blah-blah-blah methods, etc.
-
7/27/2019 Partial Differential Equation.ppt
8/18
8
Finite Differences
Assume we have a uniform mesh with a point x in
theinterior..
Forward difference: D+h u(x) = u(x+h)u(x).
Backward difference: D-h u(x) = u(x)u(x-h).
Central difference: x u(x) = u(x+h/2)u(x-h/2) or
x2 u(x) = u(x+h)2u(x) + u(x-h).
Taylor Series and Truncation Error
Look at the difference between the approximation and
the Taylor series. When they do not match, there is a
remainder, which is known as the truncation error. It is
usually specified as O(hp).
-
7/27/2019 Partial Differential Equation.ppt
9/18
9
Poisson Equation Example, Again
The Poisson equation example used central differences to
solve a block matrix problem of the form
A = [-I, T, -I ],
where I is the nxn identity matrix and T is a nxn
tridiagonal matrix [ -1, 4, -1 ]. There are n rows of blocks
in A (i.e., A is n2xn2). This is known as a 5 point
operator.
Choosing the right finite element method on a square (right
triangles with piecewise linear elements) leads to the
samematrix problem. Choosing the elements differently can
lead to a 9 point operatorinstead.
-
7/27/2019 Partial Differential Equation.ppt
10/18
10
Finite Elements (Variational Formulations)
Find u in test space H such that a(u,v) = f(v) for all v in
H,where a is a bilinear form and f is a linear functional.
The coefficients Vj are computed and the function V(x,y)
is evaluated anyplace that a value is needed. The basis
functions should have local support (i.e., have a
limited area where they are nonzero).
)(
).(
5.)(
),(),( 1
ii
jiij
iiijiijji
jj
n
j
fIntb
deldelaIntA
VbVVAVI
yxVyxV
-
7/27/2019 Partial Differential Equation.ppt
11/18
11
Matrix Free Methods
Many problems have simple matrices associated with the
linear algebra (e.g., the Poisson equation example).
By using methods (e.g., Krylov space or relaxation
methods) that only multiply the matrix A times a vector x,
code to calculate y=Ax can be written instead of storing
the matrix A.
This reduces the cost of the computer (which is mostly
memory chips) and allows for vastly larger simulations.
-
7/27/2019 Partial Differential Equation.ppt
12/18
12
Time Stepping Methods
Standard methods are common:
Forward Euler(explicit)
Backward Euler(implicit) Crank-Nicolson (implicit)
Variable length time stepping
Most common in Method of Lines (MOL) codes or
Differential Algebraic Equation (DAE) solvers
-
7/27/2019 Partial Differential Equation.ppt
13/18
13
Parallel Computation
Serious calculations today are mostly done on a parallel
computer.
The domain is partitioned into subdomains that may or
may not overlap slightly.
Goal is to calculate as many things in parallel as possible
even if some things have to be calculated on several
processors in order to avoid communication.
Communication is the Darth Vader of parallel computing.
-
7/27/2019 Partial Differential Equation.ppt
14/18
14
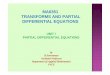
Example: Original Mesh
Consider solving a problem on the
given grid. Assume that only half
of the nodes fit on a processor.
-
7/27/2019 Partial Differential Equation.ppt
15/18
15
Dividing into two connected
subsets and renumber within the
subdomains.
Communication occurs betweenneighbors that cross the
processor boundary.
Ghost points (or overlap) can
reduce communication
sometimes at the expense ofextra computation.
Computation is o(1/1000)
communication per word.
Example: Mesh on Two Processors
-
7/27/2019 Partial Differential Equation.ppt
16/18
16
Mesh Decomposition
Goals are to maximize interior while minimizing
connections between subdomains. Critical parameter:
minimize communication.
Such decomposition problems have been studied in loadbalancing
for parallel computation.
Lots of choices:
METIS package from the University of Minnesota.
PARTI package from the University of Maryland
-
7/27/2019 Partial Differential Equation.ppt
17/18
17
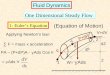
Benchmarking: Speedup
Speedup for 5 layer SEOM. Dashed lines for large Pacific
simulation
(3552 elements) and the solid lines are for the small Atlantic
Basin
simulation (792 elements). Both simulations use 7th order
spectralexpansion.
-
7/27/2019 Partial Differential Equation.ppt
18/18
18
Benchmarking: Timing
Timings versus processors for 5 layer SEOM. Dashed lines for
large
Pacific simulation (3552 elements) and the solid lines are for
the small
Atlantic Basin simulation (792 elements). Both simulations use
7th
order spectral expansion.