Embed Size (px)
Citation preview

MAT-51316Partial Differential Equations
Robert PicheTampere University of Technology
2010
Contents1 PDE Generalities, Transport Equation, Method of Characteristics 1
1.1 PDE Generalities . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Transport Equation . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Method of Characteristics . . . . . . . . . . . . . . . . . . . . . . 31.4 Example: ut + 2ux = 0 . . . . . . . . . . . . . . . . . . . . . . . 31.5 Example: ut + xux = 0 . . . . . . . . . . . . . . . . . . . . . . . 41.6 Example: ut + (xu)x = 0 . . . . . . . . . . . . . . . . . . . . . . 5
2 Models of Vibration, Diffusion and Heat Conduction; Ill-Posed Prob-lems 62.1 Vibrating String . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.2 One-dimensional Diffusion . . . . . . . . . . . . . . . . . . . . . 72.3 One-dimensional Heat Conduction . . . . . . . . . . . . . . . . . 82.4 Ill-posed Problems . . . . . . . . . . . . . . . . . . . . . . . . . 9
3 One Dimensional Wave Equation 103.1 General Solution . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2 Solution of initial value problem . . . . . . . . . . . . . . . . . . 11
3.2.1 Example: Three-finger pluck . . . . . . . . . . . . . . . . 113.2.2 Example: Hammer blow . . . . . . . . . . . . . . . . . . 12
3.3 Energy and Uniqueness . . . . . . . . . . . . . . . . . . . . . . . 13
4 One Dimensional Diffusion Equation 144.1 Solution of IVP . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.2 General Properties of the IVP Solution . . . . . . . . . . . . . . . 154.3 Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164.4 Derivation of solution formula using Fourier transforms . . . . . . 17
5 Duhamel’s Principle; Half-Line Models 195.1 Duhamel’s Principle for ODE . . . . . . . . . . . . . . . . . . . . 195.2 Duhamel’s Principle for Diffusion Equation . . . . . . . . . . . . 195.3 Diffusion/Heat on the Half Line: Reflection Method . . . . . . . . 20
i

5.4 Diffusion/Heat on the Half Line with Sources . . . . . . . . . . . 215.5 Waves on the Half Line . . . . . . . . . . . . . . . . . . . . . . . 22
6 Separation of Variables 246.1 Separation of Variables for the Heat Equation . . . . . . . . . . . 246.2 Sturm-Liouville Theory . . . . . . . . . . . . . . . . . . . . . . . 256.3 Heat IBVP with Constant Coefficients . . . . . . . . . . . . . . . 266.4 Wave IBVP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7 Numerical Solution of PDEs with Matlab 287.1 Specifying an IBVP . . . . . . . . . . . . . . . . . . . . . . . . . 287.2 Solving an IBVP . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8 Fourier Series 328.1 Least-Squares Approximation, Completeness . . . . . . . . . . . 328.2 Classical Fourier series . . . . . . . . . . . . . . . . . . . . . . . 348.3 Pointwise Convergence . . . . . . . . . . . . . . . . . . . . . . . 358.4 Solving PDE initial value problems . . . . . . . . . . . . . . . . . 368.5 Heat equation with source term . . . . . . . . . . . . . . . . . . . 38
9 Laplace’s Equation 409.1 Some Facts from Vector Analysis . . . . . . . . . . . . . . . . . . 409.2 Heat Flow in Three Dimensions . . . . . . . . . . . . . . . . . . 409.3 Membrane Vibration . . . . . . . . . . . . . . . . . . . . . . . . 419.4 Laplace’s Equation . . . . . . . . . . . . . . . . . . . . . . . . . 43
10 Solving Two-Dimensional Laplace Equations 4810.1 Dirichlet Problem in a disk . . . . . . . . . . . . . . . . . . . . . 4810.2 Dirichlet Problem in a rectangle . . . . . . . . . . . . . . . . . . 5010.3 Dirichlet-Neumann Problem in a wedge . . . . . . . . . . . . . . 5210.4 Dirichlet Problem in the region outside a circle . . . . . . . . . . 53
11 Green’s Functions 5511.1 Green’s Function for One-Dimensional Equation . . . . . . . . . 5511.2 Green’s Function for Two-Dimensional Poisson Equation . . . . . 5711.3 Green’s functions from eigenfunctions . . . . . . . . . . . . . . . 60
ii

1 PDE Generalities, Transport Equation, Method ofCharacteristics
• how to classify PDEs
• how to model one dimensional transport phenomena by a first-order PDE
• how to solve initial value problems for this equation using the method ofcharacteristics
• how to compute and plot solutions using Maple function PDEplot
1.1 PDE Generalities
Recall that an ordinary differential equation (ODE) relates a one-variable functionu(x) and its derivatives in an equation of the form
F (x, u, u′, u′′, . . . , u(n)) = 0.
The order of the ODE is the highest derivative order that appears in the equation.For example, the Malthus population growth model
u′(t) = ru(t)
is a first-order ODE with independent variable t (time), dependent variable u (pop-ulation), and constant parameter r (net growth rate).
An ODE is said to be linear if it has the form
a0(x)u(x) + a1(x)u′(x) + · · · an(x)u(n)(x)︸ ︷︷ ︸Lu
= g(x)
and a linear ODE is said to be homogeneous if g ≡ 0. Linear homogeneous ODEshave the superposition property: if u1 and u2 are solutions then so is the functionα1u1 + α2u2 for any constants α1, α2. For example, the Malthus model is a linearhomogeneous ODE.
A solution of an ODE is a function that satisfies the equation everywhere insome domain of the dependent variable. General solutions of ODEs generallycontain arbitrary constants. For example, u(t) = Aert for any constant A is asolution of the Malthus model ODE.
A partial differential equation (PDE) relates a multivariable function u(x, y, . . .)and its derivatives ux = ∂u
∂x, uxy = ∂2u
∂x∂y, . . . in an equation of the form
F (x, y, . . . , u, ux, uy, . . . , uxx, uxy, uyy, . . .) = 0
The order of the ODE is the highest derivative order that appears. Linear andhomogenous PDEs are defined analogously to ODEs. Here are some examples of
1

two-variable PDEs that are used to model physical phenomena:
1. ux + uy = 0 (transport; order 1, linear homogeneous)2. ux + yuy = 0 (transport; order 1, linear homogenous)3. ux + uuy = 0 (shock wave; order 1, nonlinear)4. uxx + uyy = 0 (Laplace eqn; order 2, linear homogeneous)5. utt − uxx + u3 = 0 (wave with interaction; order 2, nonlinear)6. ut + uux + uxxx = 0 (dispersive wave; order 3, nonlinear)7. utt + uxxxx = 0 (vibrating beam; order 4, linear homog.)8. ut − iuxx = 0 (quantum mechanics; order 2, linear homog.)
A solution of a PDE is a function that satisfies the equation everywhere in somedomain of the dependent variables. For example, both u1(x, t) = x2 + 2t andu2(x, t) = e−t sinx are solutions of the PDE ut − uxx = 0 for all (x, t). Generalsolutions of PDEs generally involve arbitrary functions. For example, the generalsolution of ux = t sinx is u(x, t) = −t cos(x) + φ(t), and the general solution ofuxy = 0 is u(x, y) = F (y) +G(x).
In this course we will see how PDEs arise as mathematical models of phe-nomena, we will present general properties of solutions, and learn some solutiontechniques.
1.2 Transport EquationConsider a substance (e.g. mass or energy) flowing in a region of space. Letu(x, t) denote its density (units: [quantity] · [volume]−1) as a function of positionx and time t, and let φ(x, t) denote the flux (units: [quantity] · [time]−1· [area]−1).(Density and flux variations in the y and z directions are assumed to be negligible.)The amount of substance in an interval a ≤ x ≤ b of a tube-shaped region ofconstant cross section A is
∫ bau(x, t)A dx.
A
ba x
The net flux into the interval is φ(a, t)A − φ(b, t)A. Let f(x, t, u) denote thesource term, that is, the rate (units: [quantity] · [time] −1 · [volume] −1) at whichsubstance density increases by processes other than flux, for example chemicalreaction. The rate of increase of the total amount of substance in the interval isthen
d
dt
∫ b
a
u(x, t)A dx = φ(a, t)A− φ(b, t)A+
∫ b
a
f(x, t, u)A dx,
which can be rearranged to give∫ b
a
(ut + φx − f) dx = 0.
Because [a, b] is arbitrary, this implies that the conservation equation
ut + φx = f
2

should hold at every point in the region.If we know the velocity c(x, t) (units: [length] · [time]−1) then the flux is
φ = cu. Substituting this constitutive equation into the conservation equationgives the transport equation
ut + (cu)x = f. (1)
In an initial value problem for the transport equation, one seeks the functionu(x, t) that satisfies (1) and that satisfies u(x, 0) = u0(x) for some given initialdensity profile u0.
1.3 Method of CharacteristicsThe transport equation (1) can be written as cux + ut = f − cxu, that is, as
c · ∇u = g where g(x, t, u) = f − cxu, c =
[c1
], and ∇u =
[uxut
]. The
transport equation thus has a geometric interpretation: we seek a surface z =u(x, t) whose directional derivative in the direction of vector c is g(x, t, u). Thisgeometric interpretation is the basis for the following solution method.
t
xk
c
Curves x = X(t) in the (x, t) plane that are tangential
to the vector field[c(x, t)
1
]are called characteristic curves.
From this definition it follows that the characteristic curve thatgoes through the point (x, t) = (k, 0) is the graph of the func-tion X that satisfies the ODE
dX
dt= c(X, t) (2)
with initial condition X(0) = k.Denoting the value of u along a characteristic curve by U(t) = u(X(t), t), we
haved
dtU =
∂u
∂x
dX
dt+∂u
∂t= cux + ut = g,
that is, the value of u along the characteristic curve is determined by the ODE
U ′ = g(X(t), t, U(t)). (3)
The solution of the ODE (2) with initial value U(0) = u0(k) determines the valueof u along the characteristic curve that intersects the x-axis at (k, 0), becauseU(0) = u(X(0), 0) = u(k, 0) = u0(k). The solution surface is the collection (orenvelope) of space curves created as k takes on all real values.
The Maple code PDEplot produces the graph of the solution using numerical
algorithms to solve the ODEs (2–3) with initial condition[X(0)U(0)
]=
[k
u0(k)
].
In simple enough cases, the ODEs can also be solved analytically “by hand”.
1.4 Example: ut + 2ux = 0
This equation models transport with constant velocity c(x, t) = 2 and no sourceterm.
3

t
xk
x – 2t k=The characteristic ODE is X ′ = 2. The solution ofthis ODE satisfying the initial conditionX(0) = k is thestraight line X = 2t + k. The characteristic curve (inthis case: the line) through a given point (x, t) crossesthe x axis at (k, 0) with k = x− 2t.
The ODE describing the value of u along a charac-teristic line is U ′(t) = 0, i.e. the value is constant along the line. The solutionof this ODE satisfying the initial condition U(0) = u0(k) is U(t) = u0(k). Thesolution of the PDE initial value problem is therefore u(x, t) = u0(x − 2t). Inparticular, if u0(x) = e−x
2 then the solution is u(x, t) = e−(x−2t)2 .
2
1.5
1 t
0.5
-2 0 24
0.2
06x
0.4
u(x,t)
0.6
0.8
The solution of the PDE ut+2ux = 0 with ini-tial profile u0(x) = e−x
2 can be plotted in Mapleby the commands
> PDE:=diff(u(x,t),t)+2*diff(u(x,t),x)=0;> with(PDEtools):> PDEplot(PDE,[x,0,exp(-xˆ2)],
x=-3..3,t=0..2);
The plot shows how the initial profile translatesto the right at constant speed without changingshape.
1.5 Example: ut + xux = 0
This equation can also be written as ut + (xu)x = u, which is of the form ofthe transport equation (1) with source term f(x, t, u) = u. This equation modelstransport in a velocity field c(x, t) = x, that is, the velocity is equal to the distancefrom the origin. The source term f(x, t, u) = u models generation of substanceat a rate equal to the amount of substance.
t
xk
x = ket
The characteristic ODE is X ′ = X . The solutionof this ODE satisfying the initial condition X(0) = kis X = ket. The characteristic curve through a givenpoint (x, t) crosses the x axis at (k, 0) with k = xe−t.
The ODE describing the value of u along a charac-teristic curve is U ′ = 0, i.e. the value is constant alongthe curve. The solution of this ODE satisfying the ini-tial condition U(0) = u0(k) is U(t) = u0(k). Thesolution of the PDE initial value problem is thereforeu(x, t) = u0(xe−t). In particular, if the initial profile is u0(x) = e−(x−3)2 then thesolution is u(x, y) = e−(xe−t−3)2 .
2
1.5t1
0.5
040302010 x0
0.2
0.4u(x,t)0.6
0.8
The solution of the PDE ut + xux = 0 withinitial profile u0(x) = e−(x−3)2 can be plotted inMaple by the commands
> PDE:=diff(u(x,t),t)+x*diff(u(x,t),x)=0;
> PDEplot(PDE,[x,0,exp(-(x-3)ˆ2)],x=0..6,t=0..2);
4

The PDE solution spreads out as time advances,and the surface height remains constant along thecharacteristic curves, and so the total amount ofsubstance increases as time advances.
1.6 Example: ut + (xu)x = 0
This equation models transport in the same velocity field as the previous example,but without the source term. The characteristic curves are the same as in theprevious example.
Rewriting the equation in the form ut + xux = −u, we see that the ODEdescribing the value of u along a characteristic curve is U ′ = −U .The solution ofthis ODE satisfying the initial condition U(0) = u0(k) is U(t) = u0(k)e−t. Thesolution of the PDE initial value problem is therefore u(x, t) = u0(xe−t)e−t. Inparticular, if the initial profile is u0(x) = e−(x−3)2 then the solution is u(x, y) =e−(xe−t−3)2−t.
2
1.5
t1
0.5
040
3020 x10
0
0.2
0.4u(x,t)
0.6
0.8
The solution of the PDE ut + xux = 0 withinitial profile u0(x) = e−(x−3)2 can be plotted inMaple by the commands
> PDE:=diff(u(x,t),t)+diff(x*u(x,t),x)=0;
> PDEplot(PDE,[x,0,exp(-(x-3)ˆ2)],x=0..6,t=0..2);
The PDE solution spreads out as time advances,and because there is no source term, the solu-tion also decreases in amplitude, so that the totalamount of substance remains constant (conserva-tion law).
5

2 Models of Vibration, Diffusion and Heat Conduc-tion; Ill-Posed Problems• how to derive the PDE for the vibrating string
• how to derive the PDE for one-dimensional diffusion or heat conduction
• how to model boundary conditions for these PDEs
• some examples of ill-posed problems
2.1 Vibrating StringConsider a thin flexible string moving in the xz plane. Assume that points of thestring move in the z direction only, and let z = u(x, t) denote the shape of thestring.
Longitudinal force balance: Let T (x, t) be the ten-sion, assumed to act tangentially along the string. Letθ = tan−1 ux denote the angle between the string tan-gent and the x axis. The only longitudinal forces actingon the part of the string between x = a and x = b are thex components of the tension force, and because there isno longitudinal motion these forces must be equal, thatis,
T (b, t) cos θ(b, t) = T (a, t) cos θ(a, t).
Because the segment is arbitrary, this implies T cos θ is constant with respect tox, say
T (x, t) cos θ(x, t) = τ(t).
Mass conservation: Let ρ(x, t) be the string’s mass per unit length, which mayvary as the string deforms during the motion, and let ρ0(x) be the mass per unitlength when the string is straight. If dx represents an element of length when thestring is straight and dx′ =
√1 + u2
x dx is the length element of the deformedstring, then mass conservation requires that ρ dx′ = ρ0 dx.
Transverse force balance: By Newton’s law, the net transversal force on astring segment [a, b] is equal to the time derivative of the momentum:
d
dt
∫ b
a
utρ dx′ = T (b, t) sin θ(b, t)− T (a, t) sin θ(a, t)
= T (b, t) cos θ(b, t) tan θ(b, t)
− T (a, t) cos θ(a, t) tan θ(a, t)
= τ(t) (ux(b, t)− ux(a, t))
= τ
∫ b
a
uxx dx.
Because of mass conservation, the left hand side can be written as ddt
∫ bautρ0 dx =∫ b
aρ0utt dx, and so the transverse force balance becomes∫ b
a
(ρ0utt − τuxx) dx = 0.
6

Because the interval is arbitrary, this implies
ρ0utt − τuxx = 0
for all (x, t) in the solution domain. Denoting c =√τ/ρ0, this can be written
utt = c2uxx,
which is the one-dimensional wave equation.If the string is modelled to have finite length, say x ∈ [0, l], then it is necessary
to specify the boundary conditions. If the motion at the ends is known, this canbe modelled by the Dirichlet condition
u(0, t) = h0(t), u(l, t) = h1(t)
In particular, fixed ends are modelled by h0 ≡ 0 and h1 ≡ 0.An end support at x = l that is not perfectly rigid can be modelled as a lin-
ear spring where the spring force is ku(l, t), with k being the spring constant.
T
k
The force balance with the transverse component of thetension
T (l, t) sin θ(l, t) = T (l, t) cos θ(l, t)︸ ︷︷ ︸τ(t)
tan θ(l, t)︸ ︷︷ ︸ux(l, t)
.
produces the Robin condition
τ(t)ux(l, t) + ku(l, t) = 0.
Similarly, a flexible support at the other end can be modelled by the Robin condi-tion
−τ(t)ux(0, t) + ku(0, t) = 0.
2.2 One-dimensional DiffusionRecall from §1.2 that the one-dimensional conservation equation relating the den-sity u(x, t) of material moving with flux φ(x, t) and source term f(x, t, u) is
ut + φx = f.
Diffusion processes, whereby substance flows from areas of high concentration toareas of low concentration, can be modelled by the constitutive relation (Fick’slaw)
φ = −kux,
where k(x) is a material parameter (diffusivity, units: [length]2·[time]−1). Com-bining these equations gives the one-dimensional diffusion equation
ut − (kux)x = f.
7

g
If the domain is of finite length, say x ∈ [0, l], thenit is necessary to specify boundary conditions. For ex-ample, consider a tube whose end x = l is covered bya thin permeable membrane, beyond which there is alarge well-stirred reservoir with given density g(t). Sup-posing the flux through the membrane is proportional to the difference in densitieson its two faces, we have
φ(l, t) = κ(u(l, t)− g(t)),
where κ is the membrane permeability. Substituting Fick’s law gives the Robincondition
kux(l, t) + κu(l, t) = κg(t).
In the limiting case κ/k → 0 (impermeable membrane, i.e. the tube end is closed)this becomes the Neumann condition
ux = 0,
while in the limiting case κ/k →∞ (no membrane) we get the Dirichlet condition
u(l, t) = g(t).
2.3 One-dimensional Heat Conduction
The one-dimensional conservation equation is equally valid when u = cρT de-notes density of heat energy. Here c(x) and ρ(x) are material parameters (specificheat and mass per unit length) and T is the temperature. The constitutive relation(Fourier’s law)
φ = −KTx
models conduction, whereby heat flows from hot areas to colder areas. The ma-terial parameter K(x) is called the heat conductivity. Combining the equationsgives the one-dimensional heat equation
cρ(T )t − (KTx)x = f.
This is very similar to the diffusion equation, and is essentially identical to it whencρ is constant.
Similarly to the diffusion equation, one can model a thin insulating layer be-tween the end x = l and a region with given temperature T1 by a Robin condition
KTx(l, t) + κT (l, t) = κT1(t)
with Neumann and Dirichlet conditions obtained as limiting cases correspondingto perfect insulation and perfect conduction.
8

2.4 Ill-posed ProblemsA mathematical model or problem often consists of a set of differential and alge-braic equations. However, not all such sets of equations are useful models: the setshould have a unique solution, and the solution should be continuously dependenton the available data. Such models are said to be “well posed problems”. Here aresome examples of PDE problems that, although they may appear to be all rightat first glance, are in fact ill-posed. Well-posed PDE problems will be presentedlater in the course.
1. The boundary value problem (BVP)
u′′(x) = 0 (0 < x < 1), u′(0) = 0, u′(1) = 1
has no solutions. The problem is overdetermined.
2. The BVP
u′′(x) = 0 (0 < x < 1), u′(0) = 0, u′(1) = 0
has infinitely many solutions, namely, solutions of the form u = constant.The problem is underdetermined.
3. The two-dimensional Laplace equation
uxx + uyy = 0
on the domain y > 0 with boundary conditions u(x, 0) = 0 and uy(x, 0) =0 has the solution u ≡ 0. If the second boundary condition is changed touy(x) = e−
√n sin(nx), the solution becomes u(x, y) = 1
ne−√n sin(nx) sinh(ny).
We can choose n large enough to make maxx |uy(x)| as small as we like,but no matter how small the perturbation, the solution always blows up asy → ∞. Thus, the problem is unstable: the solution does not depend con-tinuously on the boundary data.
9

3 One Dimensional Wave Equation
• general solution of one dimensional wave equation
• d’Alembert’s solution of initial value problem
• uniqueness of IVP solution via energy
3.1 General Solution
The one dimensional wave equation
utt − c2uxx = 0 (x ∈ R, t > 0)
models the transverse vibration of a long string whose ends are so far away thatthey can be neglected. The PDE can be written as the sytem of first-order PDEs(
∂
∂t− c ∂
∂x
)v = 0,
(∂
∂t+ c
∂
∂x
)u = v.
The PDE vt − cvx = 0 has the characteristic equation X ′ = −c, its characteristiccurves are X = −ct+ k, and the general solution is v(x, t) = h(x+ ct) where his an arbitrary function.
The PDE ut + cux = v has the characteristic equation X ′ = c, and its charac-teristic curves are X = ct + l. The value of u along the characteristic is U(t) =u(ct+ l, t); it satisfies the ODE U ′(t) = v(ct+ l, t) = h(ct+ l+ ct) = h(2ct+ l).Making the change of variables s = 2ct+ l and U(2ct+ l) = U(t), we obtain theODE 2cU ′(s) = h(s), which has the solution U(s) = f(s) + g where f = 1
2c
∫h
and g is constant along the characteristic. Then
u(x, t) = U(t) = U(2ct+ l) = f(2ct+ l) + g(l) = f(2ct+ (x− ct)) + g(x− ct)= f(x+ ct) + g(x− ct). (4)
The general solution (4) is the sum of a shape f that moves left at speed c and ashape g that moves right with speed c, as shown here:
t
xl
x – ct l= t
xk
x + ct k=
g
x
f
x
10

x
t
domain of dependence
range of influence
(x0,t0)
The general solution (4) indicates that “information”(about the local shape of the string) propagates at a finitespeed c along the characteristics. The displacement at a givenpoint in time and space (x0, t0) can be deduced from valueslying in a cone-shaped domain of dependence of previous val-ues; values outside this domain have no influence on the valueof u(x0, t0). Similarly, any point (x0, t0) has a cone-shaped range of influence.
3.2 Solution of initial value problemThe initial value problem for the one dimensional wave equation is to find thesolution given the initial displacement and velocity, that is, we are given the initialconditions
u(x, 0) = φ(x), ut(x, 0) = ψ(x).
Substituting t = 0 into u(x, t) = f(x + ct) + g(x − ct) and ut(x, t) = cf ′(x +ct)− cg′(x− ct) gives
φ(x) = f(x) + g(x), ψ(x) = cf ′(x)− cg′(x).
Differentiating the first equation and solving gives
f ′ =φ′
2+ψ
2c, g′ =
φ′
2− ψ
2c,
which can be integrated to give
f(x) = 12φ(x) + 1
2c
∫ x0ψ(ξ) dξ + A
g(x) = 12φ(x)− 1
2c
∫ x0ψ(ξ) dξ +B.
(5)
Adding these together gives f(x)+g(x) = φ(x)+A+B, so we have A+B = 0.Then
u(x, t) = f(x+ ct) + g(x− ct)
=1
2φ(x+ ct) +
1
2c
∫ x+ct
0
ψ(ξ) dξ + A+1
2φ(x− ct)− 1
2c
∫ x−ct
0
ψ(ξ) dξ +B
=1
2[φ(x+ ct) + φ(x− ct)] +
1
2c
∫ x+ct
x−ctψ(ξ) dξ (6)
Formula (6) is known as d’Alembert’s formula.
3.2.1 Example: Three-finger pluck
Consider the infinite-length string with initial displacement given by the “hat”function
φ(x) =
1− |x| |x| ≤ 1
0 otherwise
11

and initial velocity ψ ≡ 0. d’Alembert’s formula (6) gives the solution as
u(x, t) =1
2[φ(x+ ct) + φ(x− ct)].
This could be written more explicitly using a lot of “if” clauses, but such a formulawould be difficult for a human reader to interpret. A more geometric approach isto decompose the initial shape according to (5) with A = B = 0, which gives theleft-moving shape f(x) = 1
2φ(x) and the right-moving shape g(x) = 1
2φ(x). The
solution is thus the sum of two hat functions, one moving to the left and the othermoving to the right, both at speed c (see Figure 1).
x
u
ct = 0
-1 1
x
uct = 0.5
-1.5 1.5
x
uct = 2
-3 1-1 3
x-1 1
Figure 1: “Three-finger pluck” solution snapshots
3.2.2 Example: Hammer blow
Consider the infinite-length string with zero initial displacement and initial veloc-ity given by the step function
ψ(x) =
1 |x| ≤ 10 otherwise. x
-1 1
d’Alembert’s formula (6) gives the solution
u(x, t) =1
2c[Ψ(x+ ct)−Ψ(x− ct)]
where Ψ is the ramp function
Ψ(x) =
∫ x
0
ψ(ξ) dξ =
−1 x < −1x |x| ≤ 11 x > 1.
x-1 1
The solution is the sum of two mirror-image ramp functions, one moving to theleft and the other moving to the right, both at speed c.
12

3.3 Energy and UniquenessDefine the total energy E(t) of an infinitely long string as the sum of kineticenergy and potential energy
E =1
2
∫ ∞−∞
ρ0u2t dx+
1
2
∫ ∞−∞
τu2x dx.
Differentiating, we have
E ′ =1
2
∫ ∞−∞
ρ0(2ututt) dx+1
2
∫ ∞−∞
τ(2uxuxt) dx
= τ
∫ ∞−∞
(utuxx + uxuxt)︸ ︷︷ ︸(utux)x
dx = τ∣∣∣∞−∞
utux.
If we assume that the support of φ and ψ (i.e. the subset of the domain where theyare nonzero) is contained in a finite interval [a, b], it follows that u(x, t) is zero forx outside the range of influence of [a, b]. Then E ′ is identically zero and the totalenergy E remains constant in time.
Similarly, the total energy E(t) of a finite-length string is defined as
E =1
2
∫ L
0
ρ0u2t dx+
1
2
∫ L
0
τu2x dx.
If the string is assumed to be clamped at both ends, that is, u is assumed to besubject to the homogeneous Dirichlet boundary conditions
u(0, t) = 0, u(L, t) = 0,
then ut(0, t) = 0 and ut(L, t) = 0, so that E ′ = τ∣∣∣L0utux = 0, and the total
energy remains constant.The above principle of conservation of energy can be used to prove the unique-
ness of the solution of the initial value problem for the finite-length string withDirichlet boundary conditions. Let u and v be solutions of the initial-boundaryvalue problem, that is,
utt = c2uxxu(x, 0) = φ(x)ut(x, 0) = ψ(x)u(0, t) = h0(t)u(L, t) = h1(t)
and
vtt = c2vxx
v(x, 0) = φ(x)vt(x, 0) = ψ(x)v(0, t) = h0(t)v(L, t) = h1(t)
Then the difference w = u− v satisfies the initial-boundary value problem
wtt = c2wxxw(x, 0) = 0wt(x, 0) = 0w(0, t) = 0w(L, t) = 0
The energy of w at any time is equal to its energy at t = 0, which is zero, andso wx ≡ 0, which implies that w is constant with respect to x. To satisfy theboundary conditions, the constant must be zero. Thus w ≡ 0, that is, u ≡ v.
13

4 One Dimensional Diffusion Equation• Formula for the solution of the initial value problem
• General properties of the solution
• Example IVPs
• Derivation of the formula using Fourier Transforms
4.1 Solution of IVPThe solution of the initial value problem for the diffusion equation ut− kuxx = 0with u(x, 0) = φ(x) is given by formula (8) below.
Theorem 1 Let φ be a bounded and piecewise continuous function on R, and let
S(x, t) =1√
4πkte−
x2
4kt (x ∈ R, t > 0), (7)
where k is a positive constant. Then
u(x, t) =
∫ ∞−∞
S(x− ξ, t)φ(ξ) dξ (8)
is a smooth function that satisfies ut = kuxx for x ∈ R, t > 0, and
limt↓0
u(x, t) =φ(x+) + φ(x−)
2(x ∈ R). (9)
PROOF. First, note that S > 0 and that∫ ∞−∞
S(x, t) dx =︸︷︷︸p = x√
4kt
1√π
∫ ∞−∞
e−p2
dp = 1. (10)
Then
|u(x, t)| ≤(
maxx∈R|φ(x)|
)︸ ︷︷ ︸
M
∫ ∞−∞
S(x− ξ, t) dξ = M, (11)
and so the improper integral (8) converges. Also,
ux(x, t) =
∫ ∞−∞
Sx(x− ξ, t)φ(ξ) dξ
=−1√4πkt
∫ ∞−∞
x− ξ2kt
e−(x−ξ)2
4kt φ(ξ) dξ [ p = (x− ξ)/√
4kt
=1√πkt
∫ ∞−∞
pe−p2
φ(x− p√
4kt) dp,
and this integral converges because
|u(x, t)| ≤ M√πkt
∫ ∞−∞|p|e−p2 dp =
M√πkt
.
14

Similarly, it can be shown that ut, uxx, uxt, and derivatives of higher orders allexist, so u is smooth. It satisfies the diffusion equation because
(ut − kuxx)(x, t)) =
∫ ∞−∞
(St − kSxx︸ ︷︷ ︸=0
)(x− ξ, t)φ(ξ) dξ = 0.
The proof of (9) is omitted.
4.2 General Properties of the IVP Solution1. The formula (8) is a convolution1 and can be written u = S ∗ φ (with t
treated as a parameter).
2. The function S is variously called the kernel, source function, or fundamen-tal solution of the diffusion (or heat) equation. We have limt↓0 S(x, t) = 0for x 6= 0 and limt↓0 S(0, t) = ∞. Snapshots of S at various time instantsshow an initial narrow peak that spreads out as time advances.
−8 −4 0 4 80
0.4
0.8
x
S
kt = 0.1
kt = 1
kt = 10
3. Any jump discontinuities in the initial shape φ or in its derivatives are in-stantly smoothed out — not like the wave equation.
4. If φ > 0 on a finite interval [a, b] and is zero elsewhere, we have u(x, t) > 0for all x (no matter how large) and all t > 0 (no matter how small). Thus, inthis model, information has “infinite speed of propagation” — not like thewave equation.
5. A small change in the initial condition produces a small change in the solu-tion. That is, if
ut = kuxx (x ∈ R, t > 0)u(x, 0) = φ(x)
andvt = kvxx (x ∈ R, t > 0)
v(x, 0) = ψ(x),
then the difference w = u − v satisfies wt = kwxx with initial conditionw(x, 0) = φ(x) − ψ(x), and by (11) we have |w(x, t)| ≤ maxx∈R |φ(x) −ψ(x)|.
6. The initial value problem has at most one solution. This can be proved bysetting φ = ψ in the previous argument.
1 The convolution of two functions f and g is denoted f ∗ g and is given by (f ∗ g)(x) =∫∞−∞ f(x− ξ)g(ξ) dξ. Convolution is semilinear (i.e. (αf) ∗ g = α(f ∗ g)), commutative (f ∗ g =g∗f ), associative (f ∗(g∗h) = (f ∗g)∗h), and distributes over addition (f ∗(g+h) = f ∗g+f ∗h).
15

7. The identity (10) can be interpreted in terms of the IVP: u ≡ 1 is indeed asolution of the diffusion equation for φ ≡ 1.
4.3 Examples
Initial profile = step Solve the one-dimensional diffusion equation ut = kuxxwith initial condition
u(x, 0) = Heaviside(x) =
0 (x < 0)1 (x > 0)
. x
1
Write the solution using the standard function erf, which is defined as
erf(u) =2√π
∫ u
0
e−p2
dp.
1
−1
−3 3
x
Solution. The solution formula (8) gives
u(x, t) = (φ ∗ S)(x, t)
=1√
4πkt
∫ ∞−∞
e−z2/(4kt)φ(x− z) dz
=1√
4πkt
∫ x
−∞e−z
2/(4kt) dz [ p = z/√
4kt
=1√π
∫ x/√
4kt
−∞e−p
2
dp
=1√π
∫ 0
−∞e−p
2
dp+1√π
∫ x/√
4kt
0
e−p2
dp
=1
2+
1
2erf(x/
√4kt).
−8 −4 0 4 80
0.5
1
x
u
kt = 0.1kt = 1 kt = 10
Initial profile = exponential Solve the one-dimensional diffusion equation ut =kuxx with initial condition
u(x, 0) = φ(x) = e−x.
16

Solution. The solution formula (8) gives
u(x, t) =1√
4πkt
∫ ∞−∞
e−(x−ξ)2/(4kt)e−ξ dξ
=1√
4πkt
∫ ∞−∞
e−(x−2kt−ξ)2
4kt+kt−x dξ
= e−(x−kt) 1√4πkt
∫ ∞−∞
e−(x−2kt−ξ)2
4kt dξ︸ ︷︷ ︸=1
= φ(x− kt),
that is, the initial shape translates to the right with speed k.
4.4 Derivation of solution formula using Fourier transformsThe Fourier transform F = Ff and the inverse Fourier transform f = F−1F aregiven by the formulas
F (ω) =
∫ ∞−∞
f(x)e−iωx dx, f(x) =1
2π
∫ ∞−∞
F (ω)eiωx dω.
These transforms have many useful properties, including:
Linearity of FT and IFT: If g(x) = α1f1(x)+α2f2(x) thenG(ω) = α1F1(ω)+α2F2(ω). If G(ω) = β1F1(ω) + β2F2(ω) then g(x) = β1f1(x) + β2f2(x).
FT of derivative: (Ff ′)(ω) = iωF (ω).
FT of convolution: (F [f1 ∗ f2])(ω) = F1(ω)F2(ω).
The Fourier transform can be used to solve the diffusion equation IVP asfollows. Transforming ut − kuxx gives the ordinary differential equation Ut +kω2U = 0, which has the solution U(ω, t) = Ce−ω
2kt. The initial condition givesC = U(ω, 0) = Φ(ω), so we have U(ω, t) = Φ(ω)e−ω
2kt. Thus u = f ∗ φ, wheref is the inverse Fourier transform of F (ω) = e−ω
2kt.The inverse Fourier transform can be found from standard tables, or it can be
derived as follows. Differentiating f(x) = 12π
∫∞−∞ e
−ω2kteiωx dω gives
f ′(x) =1
2π
∫ ∞−∞
e−ω2ktiωeiωx dω
= − 1
2π
∣∣∣∞−∞
i
2kte−ω
2kteiωx − 1
2π
∫ ∞−∞
x
2kte−ω
2kteiωx dω
= − x
2ktf(x).
Multiplying by ex2/(4kt) gives the differential equation
ex2/(4kt)f ′(x) +
x
2ktex
2/(4kt)f(x)︸ ︷︷ ︸(ex
2/(4kt)f(x))′ = 0,
17

which has the solution ex2/(4kt)f(x) = constant. The constant is determined bythe initial condition
f(0) =1
2π
∫ ∞−∞
e−ω2kt dω =
1√4πkt
.
Thus f(x) = 1√4πkt
e−x2
4kt , which coincides with the formula of the fundamentalsolution given in (7).
18

5 Duhamel’s Principle; Half-Line Models• how to solve linear problems with source terms (Duhamel’s Principle)
• how to solve diffusion models on the half-line x > 0
• how to solve wave models on the half-line x > 0
5.1 Duhamel’s Principle for ODEConsider the linear homogeneous ODE
u+ Au = 0, (12)
where u(t) is a vector and A is a constant square matrix. The source operatorS(t) is a square matrix such that, for any vector φ, u(t) = S(t)φ is a solutionof (12) with initial condition u(0) = φ. It follows that
S(0) = I and S(t) + AS(t) = 0,
where I is the identity matrix. For example, the scalar IVP u+αu = 0, u(0) = φhas the solution u(t) = e−αtφ, that is, the source operator is S(t) = e−αt.
The following theorem shows how the general solution of the homogeneousODE can be used to solve the ODE with a source term.
Theorem 2 (Duhamel’s Principle) The function
u(t) =
∫ t
0
S(t− τ)f(τ) dτ + S(t)φ (13)
satisfies the differential equation u+ Au = f with initial condition u(0) = φ.
PROOF. We have u(0) = 0 + S(0)φ = φ and
u(t) =
∫ t
0
S(t− τ)f(τ) dτ + S(t− t)f(t) + S(t)φ
= −A
(∫ t
0
S(t− τ)f(τ) dτ + S(t)φ
)+ If(t)
= −Au(t) + f(t),
which completes the proof.Note that the integral in (13) can also be written
∫ t0S(τ)f(t− τ) dτ .
5.2 Duhamel’s Principle for Diffusion EquationConsider now the diffusion equation, which can be written as (12) with the dotrepresenting ∂
∂tand A representing the operator −k ∂2
∂x2 for functions with spatialdomain x ∈ R. The general solution of the one-dimensional diffusion equationIVP on R was shown earlier to be
u(x, t) =
∫ ∞−∞
S(x− ξ, t)φ(ξ) dξ, where S(x, t) =1√
4πkte−
x2
4kt .
19

From this formula we see that the source operator S(t) for this problem transformsthe function φ(x) into the function
∫∞−∞ S(x − ξ, t)φ(ξ) dξ. Duhamel’s principle
thus gives the solution of the IVP with source term
ut − kuxx = f(x, t), u(x, 0) = φ(x)
as
u(x, t) =
∫ t
0
∫ ∞−∞
S(x− ξ, t− τ)f(ξ, τ) dξ dτ +
∫ ∞−∞
S(x− ξ, t)φ(ξ) dξ. (14)
Example Solve the diffusion equation ut − kuxx = e−x on x ∈ R, t > 0 withinitial condition u(x, 0) = 0.SOLUTION. Duhamel’s formula gives
u(x, t) =
∫ t
0
∫ ∞−∞
1√4πk(t− τ)
e−(x−ξ)24k(t−τ) e−ξ dξ dτ
=
∫ t
0
e−x+k(t−τ) dτ =1
k(ekt − 1)e−x,
which can be verified (by substitution) to satisfy the equation and initial condition.
5.3 Diffusion/Heat on the Half Line: Reflection MethodConsider the initial-boundary value problem
vt − kvxx = 0, (x > 0, t > 0)v(x, 0) = φ(x) (x > 0)v(0, t) = 0 (t > 0).
(15)
This models, for example, the ground temperature at depth x (on a flat planet!)given an initial temperature profile φ and a surface temperature that is fixed atzero.
To solve this initial-boundary value problem, we exploit the fact that the solu-tion of the diffusion problem on the whole line is odd whenever the initial profileis odd. We introduce the odd extension of φ, that is, the function on R given by
φodd(x) =
φ(x) (x > 0)−φ(−x) (x < 0)0 (x = 0)
x
The solution of ut − kuxx = 0 on x ∈ R with initial condition u(x, 0) = φodd(x)is
u(x, t) =
∫ ∞−∞
S(x− ξ, t)φodd(ξ) dξ
=
∫ ∞0
S(x− ξ, t)φodd(ξ) dξ +
∫ 0
−∞S(x− ξ, t)φodd(ξ) dξ
=
∫ ∞0
S(x− ξ, t)φ(ξ) dξ −∫ 0
−∞S(x− ξ, t)φ(−ξ) dξ
= ′′ −∫ ∞
0
S(x+ ξ, t)φ(ξ) dξ
20

The solution of the original initial-boundary value problem (15) is then the restric-tion of u(x, t) to the half-line x > 0, that is,
v(x, t) =
∫ ∞0
Shalfline(x, ξ, t)φ(ξ) dξ, (16)
whereShalfline(x, ξ, t) = S(x− ξ, t)− S(x+ ξ, t)
Example Solve the IBVP (15) with initial profile φ(x) = 1. This models asudden drop in the surface temperature.
SOLUTION. The odd extension of the initial profile can be written as
φodd(x) = 2·Heaviside(x)−1 x
1
-1
and so, using the result from section 4.3, we have
v(x, t) = 2(
12
+ 12
erf(x/√
4kt))− 1 = erf(x/
√4kt).
0 2 4 6 80
0.5
1
x
v
kt = 0.1 kt = 1kt = 10
5.4 Diffusion/Heat on the Half Line with SourcesThe solution formula (16) can be written as Shalfline(t)φ, where the source operatorShalfline(t) transforms the function φ(x) into the function
∫∞0Shalfline(x, ξ, t)φ(ξ) dξ.
Then, using Duhamel’s Principle, the solution of the IBVP with source function
wt − kwxx = f, (x > 0, t > 0)w(x, 0) = φ(x) (x > 0)w(0, t) = 0 (t > 0).
(17)
can be written directly as
w(x, t) =
∫ t
0
∫ ∞0
Shalfline(x, ξ, t− τ)f(ξ, τ) dξ dτ +
∫ ∞0
Shalfline(x, ξ, t)φ(ξ) dξ.
Now consider the IBVP with Dirichlet boundary condition
yt − kyxx = 0, (x > 0, t > 0)y(x, 0) = 0 (x > 0)y(0, t) = h(t) (t > 0).
21

Setting w(x, t) = y(x, t)− h(t) yields the IBVP
wt − kwxx = −h, (x > 0, t > 0)w(x, 0) = −h(0) (x > 0)w(0, t) = 0 (t > 0),
which is of the same form as (17) so, using its solution and the results of theexample in section 5.3, we have
y(x, t) = h(t)−∫ t
0
h(τ)
∫ ∞0
Shalfline(x, ξ, t− τ) dξ dτ − h(0)
∫ ∞0
Shalfline(x, ξ, t) dξ
= h(t)−∫ t
0
erf
(x√
4k(t− τ)
)h(τ) dτ − h(0) erf
(x√4kt
).
5.5 Waves on the Half Line
Consider the wave equation initial-boundary value problem
vtt − c2vxx = 0 (x > 0, t > 0)v(x, 0) = φ(x), vt(x, 0) = ψ(x) (x > 0)
v(0, t) = 0 (t > 0).
(18)
This models a semi-infinite string with one end fixed.We can use the reflection method here too, because the solution of the wave
equation on the whole line is odd whenever both φ and ψ are odd. Applyingd’Alembert’s formula, the solution of the odd-extended problem is
u(x, t) =1
2[φodd(x+ ct) + φodd(x− ct)] +
1
2c
∫ x+ct
x−ctψodd(ξ) dξ,
and so the solution of (18) is
v(x, t) =
12[φ(x+ ct) + φ(x− ct)] + 1
2c
∫ x+ct
x−ct ψ(ξ) dξ (x− ct > 0)
12[φ(x+ ct)− φ(ct− x)] + 1
2c
∫ x+ct
ct−x ψ(ξ) dξ (x− ct < 0).
Example The solution of the IBVP (18) with initial profile φ(x) = e−(x−3)2 andzero initial velocity is
v(x, t) =
12[e−(x+ct−3)2 + e−(x−ct−3)2 ] (x− ct > 0)
12[e−(x+ct−3)2 − e−(ct−x−3)2 ] (x− ct < 0).
22

0 2 4 6 8−1
0
1
x
ct = 0
ct = 0.75
ct = 1.5
ct = 2.25
ct = 3
ct = 3.75
ct = 4.5
ct = 5.25
23

6 Separation of Variables
• first steps in solving the heat and wave equation on an interval
• eigenvalues and eigenfunctions (Sturm-Liouville theory)
6.1 Separation of Variables for the Heat Equation
Consider the IBVP
µut − (κux)x = 0 (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)u(x, 0) = φ(x) (x ∈ (0, l))
(19)
where µ(x) = c(x)ρ(x) > 0 and κ(x) > 0. This models heat flow in a pipe oflength l with fixed temperatures at the ends (Dirichlet boundary conditions).
Substituting a trial solution of the form u(x, t) = X(x)T (t) into the PDEin (19) and rearranging gives
T ′
−T=
(κX ′)′
−µX.
The function on the left side of this equation is constant with respect to x and thefunction on the right side is constant with respect to t, so they are both equal to aconstant, call it λ. We then have two ODEs, namely
T ′ + λT = 0,
which has general solution T (t) = T (0)e−λt, and
(κX ′)′ + λµX = 0, (20)
which, because of the boundary conditions in (19), has the boundary conditions
X(0) = 0, X(l) = 0. (21)
The solution method is as follows:
1. find numbers λn and nonzero functions Xn that satisfy the BVP (20–21);
2. express the initial condition as a linear combination of the Xn, that is,φ(x) =
∑nCnXn(x);
3. then u(x, t) =∑
nCnXn(x)e−λnt.
In the remainder of this lecture we focus on stage 1 of the method.
24

6.2 Sturm-Liouville TheoryTheorem 3 There are infinitely many pairs of numbers λn (eigenvalues) and nonzerofunctions Xn (eigenfunctions) that are solutions of problem (20–21). The eigen-values are real and positive, the eigenfunctions corresponding to distinct eigen-values are µ-orthogonal, that is,
λm 6= λn ⇒∫ l
0
µ(x)Xm(x)Xn(x) dx = 0,
and every eigenvalue has multiplicity 1, that is, the corresponding eigenfunctionis unique up to a multiplicative factor.
PROOF. First, note that for any two eigenfunctions we have
(κX ′mXn − κX ′nXm)′ = (λn − λm)µXmXn;
this can be verified by expanding the left hand side then substituting the ODE.Now, if (λn, Xn) satisfies (20–21) then so does the complex conjugate pair (λn, Xn),and so
(λn − λn)
∫ l
0
µXnXn dx =∣∣∣l0
(κX ′nXn − κX ′nXn) = 0,
and dividing this through by∫ l
0µ|Xn|2 dx (which is > 0) leads us to the result
λn − λn = 0, that is, the eigenvalues are real.Next, if λm 6= λn,∫ l
0
µXmXn dx =1
λn − λm
∣∣∣l0
(κX ′mXn − κX ′nXm) = 0,
and so Xm and Xn are µ-orthogonal.Next, multiplying the ODE (20) by X and integrating, we obtain∫ l
0
X(κX ′)′ dx+ λ
∫ l
0
µX2 dx = 0,
from which we can solve for λ and get
λ =−∫ l
0X(κX ′)′ dx∫ l
0µX2 dx
=
∫ l0κ(X ′)2 dx−
∣∣∣l0κXX ′∫ l
0µX2 dx
≥ 0.
The case λ = 0 can be ruled out, because
λ = 0⇒∫ l
0
κ(X ′)2 dx = 0⇒ X ′ ≡ 0⇒ X is constant
and the only constant that is consistent with the boundary conditions (21) is zero.Finally, if (λ,X1) and (λ,X2) satisfy (20–21), we have
(κX ′1X2 − κX ′2X1)′ = (λ− λ)µX1X2 = 0,
and so κ(X ′1X2 − X ′2X1) = constant. The boundary condition (21) implies thatthe constant is zero, so X ′1X2 − X ′2X1 = 0. Then (X2/X1)′ = 0, so X2/X1
is a constant, that is, the eigenfunctions corresponding to λ are identical up to amultiplicative factor.
The proof of existence and infiniteness of number of eigenvalues is omitted.
25

6.3 Heat IBVP with Constant CoefficientsFor the heat equation (19) with constant µ and κ, equation (20) has the generalsolution
X(x) = A cos(x√λ/k) +B sin(x
√λ/k),
where k = κ/µ. The boundary conditions (21) imply that A = 0 and that
sin(l√λ/k) = 0.
This is satisfied when l√λ/k = nπ for n ∈ Z, so we have the eigenvalues
λn = k(nπ/l)2 for n ∈ 1, 2, . . .. (The solution λ = 0 is rejected because thegeneral solution ofX ′′ = 0 isX(x) = E+Fx, and the boundary conditions implyE = 0 and F = 0.) The corresponding eigenfunctions are Xn(x) = sin(nπx
l).
0 1−1
0
1X1
x/l
0 1−1
0
1X2
0 1−1
0
1X3
0 1−1
0
1X4
0 1−1
0
1X5
0 1−1
0
1X6
For initial conditions of the form
φ(x) = C1 sin(πxl
) + C2 sin(2πxl
) + · · ·+ Cn sin(nπxl
),
the solution of (19) is a linear combination of spatial sinusoids with amplitudesthat are exponentially decaying in time:
u(x, t) = C1 sin(πxl
)e−kπ2t/l2+C2 sin(2πx
l)e−4kπ2t/l2+· · ·+Cn sin(nπx
l)e−kn
2π2t/l2 .
The solution tends to zero as time advances: all the heat eventually leaks out ofthe ends of the tube. Note that the terms corresponding to larger n have waviershape and decay in time faster.
6.4 Wave IBVPConsider the IBVP
ρ0utt − τuxx = 0 (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)
u(x, 0) = φ(x), ut(x, 0) = ψ(x) (x ∈ (0, l))
(22)
where ρ0(x) > 0 and τ > 0. This models the small-amplitude transverse motionof a taught flexible string with fixed ends.
26

Proceeding as for the heat equation, we assume a trial solution of the formu(x, t) = X(x)T (t) and obtain two ODEs,
T ′′ + λT = 0,
which has the general solution T (t) = T (0) cos(t√λ) + 1√
λT ′(0) sin(t
√λ), and
the eigenvalue problem
τX ′′ + λρ0X = 0, X(0) = 0, X(l) = 0.
This is a special case of (20–21), so the results of Theorem 1 apply here also:there are real positive eigenvalues 0 < λ1 < λ2 < · · · with unique eigenfunctionsX1(x), X2(x), . . .. If the initial conditions are linear combinations of eigenfunc-tions, that is, if
φ(x) =∑n
AnXn(x) and ψ(x) =∑n
BnXn(x),
then the solution of (22) is a superposition of shapes whose amplitudes vary sinu-soidally in time:
u(x, t) =∑n
(An cos(t
√λn) +
1√λnBn sin(t
√λn)
)Xn(x).
The factors√λn are called natural frequencies and have units [radians per time
unit].In the case where ρ0 is constant, the eigenvalues are λn = (nπc/l)2 and the
eigenfunctions are Xn(x) = sin(nπx/l) for n ∈ 1, 2, . . ., where c =√τ/ρ0.
In this case, all the natural frequencies are integer multiples of the fundamentalfrequency
√λ1 = πc/l = π
l
√τρ0
. From this formula we can explain various
musical phenomena associated with guitar or violin strings:
• the note rises by one octave (i.e. the frequency is doubled) when the stringis clamped at its midpoint, because the clamping produces two vibratingstrings, each half the length;
• the note rises when the string is tightened, because the tightening increasesthe value of τ .
27

7 Numerical Solution of PDEs with Matlab• How to solve IBVPs in one spatial dimension using pdepe
7.1 Specifying an IBVP
The Matlab solver pdepe solves PDEs of the form
µ(x, t, u, ux)ut = x−m (xmf(x, t, u, ux))x+s(x, t, u, ux) (x ∈ (a, b), t ∈ (t0, tfinal])
The constant m may be 0, 1 or 2; if m > 0 then a must be non-negative. The fluxterm f must depend on ux. The term µ must be non-negative, and may only bezero at mesh points. Spatial discontinuities in µ or the source term s are allowedbut only at mesh points.
The problem has an initial condition of the form
u(x, t0) = φ(x) (a ≤ x ≤ b).
The boundary conditions are
pleft(a, t, u(a, t)) + qleft(a, t)f(a, t, u(a, t), ux(a, t)) = 0,pright(b, t, u(b, t)) + qright(b, t)f(b, t, u(b, t), ux(b, t)) = 0
for t ≥ t0, where qleft and qright are either identically zero or never zero.Thus, the mathematical problem is completely defined by the specifying the
values m, a, b, t0, tfinal and by the functions µ, f, s, pleft, qleft, pright, qright, φ.
Example 1 Consider the PDE π2ut = uxx on 0 < x < 1 and 0 < t ≤ 2 withboundary conditions
u(0, t) = 0, ux(1, t) = −πe−t
and initial condition u(x, 0) = sin(πx). This models for example the tempera-ture in a rod with cρ = π2 and K = 1 that is insulated along its length, its leftend maintained at constant zero temperature, and flux at the right end given byKux(1) = −πe−t (the negative sign implies that heat flows out of the rod at thisend).
The specification of the problem for solution by pdepe is
m = 0, a = 0, b = 1, t0 = 0, tfinal = 2,µ(x, t, u, ux) = π2, f(x, t, u, ux) = ux, s(x, t, u, ux) = 0,pleft(a, t, u(a, t)) = u(a, t), qleft(a, t) = 0,pright(b, t, u(b, t)) = πe−t, qright(b, t) = 1,φ(x) = sin(πx).
The exact solution for this problem can be obtained by the method of separationof variables:
u(x, t) = e−t sin(πx).
28

Example 2 Consider the PDE
ut = x−2(x2f(x, t, u, ux))x + s(x, t, u, ux) (0 < x < 1, 0 < t ≤ 1),
where
f(x, t, u, ux) =
5ux x ∈ (0, 0.5]ux x ∈ (0.5, 1)
, s(x, t, u, ux) =
−1000eu x ∈ (0, 0.5]−eu x ∈ (0.5, 1)
The boundary conditions are ux(0, t) = 0 and u(1, t) = 1, and the initial conditionis
φ(x) =
0 x ∈ (0, 1)1 x = 1.
The specification of the problem for solution by pdepe is
m = 2, a = 0, b = 1, t0 = 0, tfinal = 1,µ(x, t, u, ux) = 1,pleft(a, t, u(a, t)) = 0, qleft(a, t) = 1pright(b, t, u(b, t)) = u(b, t)− 1, qright(b, t) = 0.
and with f, s, φ specified as above.
7.2 Solving an IBVPThe syntax of the Matlab PDE solver for a single PDE is
sol = pdepe(m,pdefun,icfun,bcfun,xmesh,tspan)
where
m is 0, 1 or 2,
pdefun is a handle to a function that computes µ, f and s, with calling syntax
[mu,f,s] = pdefun(x,t,u,ux)
icfun is a handle to a function that computes the initial condition φ, with callingsyntax
phi = icfun(x)
bcfun is a handle to a function that computes the boundary condition. Its callingsyntax is
[pleft,qleft,pright,qright] = bcfun(a,ua,b,ub,t)
where ua and ub are the values of u(a, t) and u(b, t). For m > 0 anda = 0 the solver automatically uses the boundary condition ux(0, t) = 0and ignores the values returned in pleft and qleft.
29

xmesh is a vector of points in [a, b] where the solution is approximated. Thesolution interval end points a and b are xmesh(1) and xmesh(end),the values of xmesh must be monotonically increasing, and the length ofxmesh must be at least 3.
tspan is a vector of time values where the solution is approximated. The startand end times t0 and tfinal are tspan(1) and tspan(end), the values oftspan must be monotonically increasing, and the length of tspan mustbe at least 3.
sol is a three-dimensional array where sol(i,j,1) is the solution value attime tspan(i) and mesh point xmesh(j). (The third dimension is forsystems of PDEs.)
Example 1 can be coded by the functions
function [mu,f,s] = pdex1pde(x,t,u,ux)mu = piˆ2;f = ux;s = 0;
function phi = pdex1ic(x)phi = sin(pi*x);
function [pleft,qleft,pright,qright] = pdex1bc(a,ua,b,ub,t)pleft = ua;qleft = 0;pright = pi * exp(-t);qright = 1;
and solved using
x = linspace(0,1,20);t = linspace(0,2,5);sol = pdepe(0,@pdex1pde,@pdex1ic,@pdex1bc,x,t);u = sol(:,:,1);surf(x,t,u)
30

00.2
0.40.6
0.81
00.5
11.5
20
0.2
0.4
0.6
0.8
1
Distance xTime t
The code to solve this example is pdex1 which you can run from the Matlabcommand line. You can look at it using the command
edit pdex1
See pdex2 for the code that solves Example 2.
31

8 Fourier Series• How to approximate a function by a linear combination of orthogonal func-
tions
• Fourier series and its convergence in mean square and pointwise
• Solving PDEs using Fourier series
8.1 Least-Squares Approximation, Completeness
Consider the approximation of a function f(x) by a linear combination∑N
n=1 cnXn(x)of functions X1, X2, . . . that are µ-orthogonal on (a, b).
Theorem 4 The coefficients c1, c2, . . . , cN that minimize the mean-square errorof the approximation,
EN =
∫ b
a
µ(x)
(f(x)−
N∑n=1
cnXn(x)
)2
dx,
are the Fourier coefficients
cn =
∫ baµ(x)f(x)Xn(x) dx∫ baµ(x)(Xn(x))2 dx
.
PROOF. We use the notation (f, g) =∫ baµ(x)f(x)Xn(x) dx (“inner product”)
and ‖f‖ =√
(f, f) (“2-norm”). Then
EN = ‖f −∑n
cnXn‖2
= (f −∑m
cmXm, f −∑n
cnXn)
= ‖f‖2 − 2∑n
cn(f,Xn) +∑m
∑n
cmcn(Xm, Xn)︸ ︷︷ ︸∑n
c2n‖Xn‖2
= ‖f‖2 +∑n
‖Xn‖2
(cn −
(f,Xn)
‖Xn‖2
)2
−∑n
(f,Xn)2
‖Xn‖2,
which is minimized when cn = (f,Xn)/‖Xn‖2. 2
Theorem 5 (Bessel’s inequality) The Fourier coefficients of f satisfy
∞∑n=1
c2n‖Xn‖2 ≤ ‖f‖2. (23)
32

PROOF. Substituting cn = (f,Xn)/‖Xn‖2 into the last line of the previous proofgives
∑Nn=1 c
2n‖Xn‖2 ≤ ‖f‖2. Because the sequence of partial sums is monotone
and bounded, the series converges and the limit satisfies (23). 2
We saw earlier that the eigenfunctions of a Sturm-Liouville problem corre-sponding to distinct eigenvalues are µ-orthogonal. The eigenfunctions corre-sponding to a single eigenvalue span a space of dimension at most 2, so one canfind an orthogonal basis of the space spanned by all the eigenfunctions. The fol-lowing result, whose proof is omitted, tells about the convergence of the best leastsquares approximation that uses this basis.
Theorem 6 The set of orthogonal eigenfunctions of a Sturm-Liouville problem iscomplete in the sense that for every function with finite 2-norm ‖f‖, the best leastsquares approximation sN(x) =
∑Nn=1(f,Xn)Xn(x)/‖Xn‖2 converges to f in
the mean square sense: limN→∞ ‖f − sN‖ = 0. Also,∑∞
n=1 c2n‖Xn‖2 = ‖f‖2
(Parseval’s identity).
Example 1 The functions sin(nπx/l) are the eigenfunctions ofX ′′+λX = 0 on(0, l) with boundary conditions X(0) = 0, X(l) = 0. The corresponding Fouriercoefficients of the function f(x) = 1 (0 < x < l) are
cn =
∫ l0
sin(nπx/l) dx∫ l0
sin2(nπx/l) dx=
2(1− (−1)n)
nπ,
and the eigenfunction expansion is
f(x) =4
π
(sin(πx/l) + 1
3sin(3πx/l) + 1
5sin(5πx/l) + · · ·
).
Some partial sums sN(x) =∑N
n=1 cn sin(nπx/l) are:
0 10
1
s1
x / l
s3 s5 s21
Parseval’s identity for this example gives the interesting series
∑n=1,3,...
1
n2=π2
8.
33

8.2 Classical Fourier seriesThe trigonometric basis functions 1, cos(πx/l), sin(πx/l), cos(2πx/l), sin(2πx/l),. . .are 2l-periodic and orthogonal on(−l, l), that is,∫ l
−lcos(mπx/l) cos(nπx/l) dx = 0 (m 6= n)∫ l
−lsin(mπx/l) sin(nπx/l) dx = 0 (m 6= n)∫ l
−lcos(mπx/l) sin(nπx/l) dx = 0
This can be verified using trigonometric identities; the first two orthogonalityresults can also be derived using the orthogonality of eigenfunctions of distincteigenvalues for the Sturm-Liouville problem X ′′ + λX = 0 with periodic bound-ary conditions, as in problem 5 of exercise set 6. Then, using the results∫ l
−ldx = 2l,
∫ l
−lcos2(nπx/l) dx =
∫ l
−lsin2(nπx/l) dx = l (n ≥ 1),
we find that the coefficients that minimize the mean square error of
sN(x) = 12a0 +
N∑n=1
an cos(nπx/l) + bn sin(nπx/l)
as an approximation of f are
an =1
l
∫ l
−lf(x) cos(nπx/l) dx (n ≥ 0),
bn =1
l
∫ l
−lf(x) sin(nπx/l) dx (n ≥ 1).
These are the coefficients of the classical Fourier series, which by Theorem 3converges in the mean square sense to f provided that ‖f‖ is finite. Parseval’sidentity can be written
12a2
0 +∞∑n=1
(a2n + b2
n
)=
1
l
∫ l
−l(f(x))2 dx.
Example 2 The Fourier series coefficients of the function f(x) = x/l (−l <x < l) are
an =1
l
∫ l
−l
x
lcos(nπx/l) dx = 0 (n ≥ 0),
bn =1
l
∫ l
−l
x
lsin(nπx/l) dx =
2
nπ(−1)n+1 (n ≥ 1).
and so the Fourier series for f is
2
π
(sin(πx/l)− 1
2sin(2πx/l) + 1
3sin(3πx/l)− . . .
).
34

Some partial sums sN(x) are:
−1 0 1−1
0
1s1
x / l
s2 s4 s10
Parseval’s identity for this example gives the interesting series
∞∑n=1
1
n2=π2
6.
The above example illustrates the fact that the Fourier series of an odd-symmetricfunction has only sine terms. Similarly, the Fourier series of an even function hasonly cosine terms. These facts can be used to relate Fourier series with sine or co-sine series. For example, the series in Example 1 extended to the interval (−l, l)is the Fourier series of the step function
f(x) =
−1 −l < x < 00 x = 01 0 < x < l.
x
-1
1
-l l
8.3 Pointwise ConvergenceA function f is said to be piecewise continuous on the finite interval [a, b] if f(a+)and f(b−) exist and f is continuous on (a, b) except for a finite number of simplejumps (i.e. points of discontinuity where the left and right limits exist). A functionis piecewise continuous on R if it is piecewise continuous on every finite interval.
A function f is said to be piecewise C1 on [a, b] if it is piecewise continuous on[a, b], f ′(a+) and f ′(b−) exist, and f ′ exists and is continuous in (a, b) except for afinite number of simple jumps. A function is piecewise C1 on R if it is piecewiseC1 on every finite interval.
Theorem 7 (Dirichlet’s Theorem) The Fourier series of a 2l-periodic functionf that is piecewise C1 on R converges to f(x+)+f(x−)
2for all x. In particular, it
converges to f(x) at every point x where f is continuous.
The function in Example 2 can be extended to a 2l-periodic function withf(nl) = 0 for n ∈ Z:
−5 −3 −1 1 3 5−1
0
1
x / l
This extended function is piecewiseC1, with a jump of−2 at every odd multiple of
35

l. According to Theorem 4, the Fourier series converges to the extended functionat every x. The oscillation near the jump that is seen in the partial sums (Gibbs’phenomenon) does not spoil the convergence because it becomes infinitesimallynarrow as the number of terms is increased.
Similarly, the function in Example 1 can be extended to a 2l-periodic oddfunction:
−5 −4 −3 −2 −1 0 1 2 3 4 5−1
0
1
x / l
This extended function is piecewise C1, so the Fourier series converges to it atevery x.
0 1 20
1
2
3
s1
s2
s3
x
Pointwise convergence does not imply mean square conver-gence. For example, the function sequence
sN(x) =N
1 +N2x2(x > 0)
converges pointwise to the zero function, but does not convergein the mean-square sense because
‖sN‖2 >
∫ l
0
N2
(1 +N2x2)2dx = N
∫ Nl
0
1
(1 + y2)2dy,
and∫∞
0(1 + y2)−2 dy = π/4, so ‖sN‖ → ∞.
Also, mean square convergence does not imply pointwise convergence. Forexample, the function sequence
fN(x) =
N |x| < 1/N3
0 otherwise (x ∈ R) xN-3-N-3
N
converges in mean square to the zero function, because∫ ∞−∞
(fN(x))2 dx =
∫ 1/N3
−1/N3
N2 dx =2
N→ 0,
but does not converge pointwise at x = 0.
8.4 Solving PDE initial value problemsHeat equation with Dirichlet boundary conditions As we saw in lecture 6,the solution of the IBVP
ut − kuxx = 0 (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)u(x, 0) = φ(x) (x ∈ (0, l))
36

is
u(x, t) =∞∑n=1
cn sin(nπx
l
)e−k(nπ/l)2t,
where the cn are the Fourier coefficients of the initial profile,
cn =2
l
∫ l
0
φ(x) sin(nπx/l) dx.
0
0.1
0.2 0
10
0.5
1
x/lkt/l2
In particular, if φ(x) = 1 for 0 < x < l,we can use the coefficients from Example 1and obtain the solution
u(x, t) =∞∑n=1
2(1−(−1)n)nπ
sin(nπxl
)e−k(nπ/l)2t.
A plot of the partial sum with 21 termsshows the rapid decay of the higher fre-quency terms and the disappearance of theGibbs oscillation.
Wave equation with Dirichlet boundary conditions As we also saw in lec-ture 6, the solution of the IBVP
utt − c2uxx = 0 (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)
u(x, 0) = φ(x), ut(x, 0) = ψ(x) (x ∈ (0, l))
is
u(x, t) =∞∑n=1
(An cos(nπct/l) +
l
nπcBn sin(nπct/l)
)sin(nπx/l),
where the An and Bn are the Fourier coefficients of the initial profiles,
An =2
l
∫ l
0
φ(x) sin(nπx/l) dx, Bn =2
l
∫ l
0
ψ(x) sin(nπx/l) dx.
In particular, if φ(x) = 0 and ψ(x) = 1 for 0 < x < l, we can use the coefficientsfrom Example 1 and obtain the solution
u(x, t) =∞∑n=1
2(1− (−1)n)l
n2π2csin(
nπct
l) sin(
nπx
l)
=∞∑n=1
2(1− (−1)n)l
n2π2c
(12
cos(nπ(ct− x)
l)− 1
2cos(
nπ(ct+ x)
l)
).
The second formula has the same form as the general solution of the wave equationf(x+ ct) + g(x− ct). A plot of a partial sum with a large number of terms showsthe time-periodic response:
37

0
1
2 0
1−0.1
0
0.1
x/lct/l
8.5 Heat equation with source term
Consider the heat equation with Dirichlet boundary conditions
µut − (κux)x = 0 (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)u(x, 0) = φ(x) (x ∈ (0, l))
By the method of separation of variables, we have found that the source operatorS(t) for this problem transforms the initial profile φ(x) into the function
∑n
(φ,Xn)
‖Xn‖2Xn(x)e−λnt,
where Xn are µ-orthogonal eigenfunctions corresponding to the eigenvalues λn.Then, by Duhamel’s principle, the solution of the problem with source term, thatis, of
µut − (κux)x = µ(x)f(x, t) (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)
u(x, 0) = 0 (x ∈ (0, l))
(24)
is
u(x, t) =
∫ t
0
∑n
(f(τ), Xn)
‖Xn‖2Xn(x)e−λn(t−τ)dτ.
Assuming that integration and summation commute, the solution can be writtenas
u(x, t) =∑n
un(t)Xn(x),
where
un(t) =
∫ t
0
fn(τ)e−λn(t−τ) dτ (25)
with
fn(τ) =(f(τ), Xn)
‖Xn‖2=
∫ l0µ(ξ)f(ξ, τ)Xn(ξ) dξ∫ l0µ(ξ)(Xn(ξ))2 dξ
.
38

Here is an alternative derivation of the solution of (24). Substituting an as-sumed solution of the form u(x, t) =
∑m um(t)Xm(x) into the PDE gives
µ(x)f(x, t) =∑m
(µu′mXm − um(κX ′m)′) =∑m
µ(u′m + λmum)Xm.
Multiplying through by Xn/‖Xn‖2 and integrating gives the decoupled ODEs
1
‖Xn‖2(f(t), Xn)︸ ︷︷ ︸fn(t)
=∑m
(u′m + λmum)(Xm, Xn)/‖Xn‖2 = u′n(t) + λnun(t),
each of which (with initial condition un(0) = 0) has the solution (25).For example, for the constant-coefficient heat equation problem
ut − kuxx = 1 (x ∈ (0, l), t > 0)u(0, t) = 0, u(l, t) = 0 (t ≥ 0)
u(x, 0) = 0 (x ∈ (0, l))
0
1 0
0.2
0.4
0
0.05
0.1
kt/l2x/l
we have
fn(t) =2
l
∫ l
0
sin(nπξ/l) dξ =2(1− (−1)n)
nπ
and so u(x, t) =∑∞
n=1 un(t) sin(nπx/l)with
un(t) =2(1− (−1)n)
nπ
∫ t
0
e−k(nπ/l)2(t−τ) dτ
=2(1− (−1)n)
kn3π3/l2(1− e−k(nπ/l)2t).
39

9 Laplace’s Equation• Vector Analysis facts
• Diffusion and Heat flow in three dimensions
• Membrane vibration
• Laplace’s equation
9.1 Some Facts from Vector AnalysisLet D be an open simply connected spatial domain with surface ∂D, let n be theoutward unit normal, and let f be a vector field. Gauss’s divergence theorem is∫
D
∇ · f dV =
∫∂D
f · n dA,
where the divergence of the vector field having cartesian coordinates f = f1i +f2j + f3k is
∇ · f =∂f1
∂x+∂f2
∂y+∂f3
∂z.
The gradient of a scalar field u(x) in cartesian coordinates is the vector
∇u =∂u
∂xi +
∂u
∂yj +
∂u
∂zk.
Applying the divergence theorem to f = v∇u, where u and v are scalar fields,yields Green’s first identity∫
∂D
(v∇u) · n dA =
∫D
(∇v ·∇u+ v∆u) dV
where ∆u = ∇ ·∇u = uxx + uyy + uzz is the laplacian of u.In two dimensional problems, D denotes a two-dimensional domain and ∂D
denotes the closed curve that is its boundary. The divergence theorem is written∫D
∇ · f dA =
∫∂D
f · n dl,
and Green’s first identity is written∫∂D
(v∇u) · n dl =
∫D
(∇v ·∇u+ v∆u) dA.
9.2 Heat Flow in Three DimensionsConsider a substance (e.g. mass or energy) flowing in a region Ω of space. Letu(x, t) denote its density (units: [quantity] · [volume]−1) as a function of positionx = [x, y, z] and time t, and let ~φ(x, t) denote the flux vector. (units: [quantity] ·[time]−1· [area]−1). The amount of substance in a domain D ⊆ Ω is given by thevolume integral
∫Du(x, t) dV .
40

Letting n denote the unit normal vector on the surface ∂D of the domain D, thenet flux out of the domain is given by
∫∂D~φ · n dA. Let f(x, t, u) denote the
source term, that is, the rate (units: [quantity] · [time] −1 · [volume] −1) at whichsubstance density increases by processes other than flux, for example chemicalreaction. The rate of increase of the total amount of substance in the interval isthen
d
dt
∫D
u(x, t) dV = −∫∂D
~φ · n dA+
∫D
f(x, t, u)dV.
Using the divergence theorem, the surface integral can be replaced by a volumeintegral, yielding ∫
D
(ut +∇ · ~φ− f
)dV = 0.
Because D is arbitrary, this implies that the conservation equation
ut +∇ · ~φ = f
should hold at every point in the region Ω.Diffusion processes, whereby substance flows from areas of high concentra-
tion to areas of low concentration, can be modelled by the constitutive relation(Fick’s law)
~φ = −k∇u,
where k(x) is a material parameter (diffusivity, units: [length]2·[time]−1). Sub-stituting this into the conservation equation gives the three-dimensional diffusionequation
ut −∇ · (k∇u) = f.
When k is constant, the equation reduces to ut − k∆u = f .Alternatively, we can let u = cρT denote density of heat energy, where c(x)
and ρ(x) are material parameters (specific heat and mass per unit length) and T isthe temperature. The constitutive relation (Fourier’s law)
~φ = −K∇T
models conduction, whereby heat flows from hot areas to colder areas. The ma-terial parameter K(x) is called the heat conductivity. Substituting Fourier’s lawinto the conservation equation gives the three-dimensional heat equation
cρTt −∇ · (K∇T ) = f.
This equation is very similar to the diffusion equation, and is essentially identicalto it (except for notation) when cρ is constant.
9.3 Membrane Vibration
Let u(x, y, t) denote the displacement of a thin membrane that moves in the z di-rection (“vertical”) only.
41

Horizontal force balance: Let T (x, y, t) bethe tension (units [force] · [length]−1), as-sumed to act tangentially along the mem-brane. Let D be a domain in the xy(“horizontal”) plane, let ∂D be its bound-ary curve, and let n denote the unit out-ward normal vector (in the xy plane) on∂D. Let un = n · ∇u denote the direc-tional derivative of u in the direction n; thenθ = tan−1(n · ∇u) is the angle between nand the tension vector. Because there is no horizontal motion, the vector sum ofthe horizontal forces acting on the boundary must be zero, that is,∫
∂D
T cos θ n dl = 0.
Then, for any constant vector a, we have
a · 0 = a ·∫∂D
T cos θ n dl =
∫∂D
(aT cos θ) · n dl
=
∫D
∇ · (aT cos θ) dA = a ·∫D
∇(T cos θ) dA,
and since a is arbitrary, this implies∫D∇(T cos θ) dA = 0. Because the domain
is arbitrary, this in turn implies ∇(T cos θ) = 0, so that T cos θ is constant withrespect to x and y, say
T (x, y, t) cos θ(x, y, t) = τ(t).
Mass conservation: Let ρ(x, y, t) be the membrane’s mass per unit area (ρmay vary as the membrane deforms during the motion), and let ρ0(x, y) be themass per unit area when the membrane is plane. If dA′ represents an area elementof deformed membrane and dA represents the same element when the membraneis plane, then mass conservation requires that ρ dA′ = ρ0 dA.
Vertical force balance: Consider a membrane piece whose projection onto thexy plane is D. By Newton’s law, the net vertical force on this piece is equal to thetime derivative of the momentum:
d
dt
∫D
utρ dA′ =
∫∂D
T sin θ dl =
∫∂D
T cos θ tan θ dl
=
∫∂D
τ∇u · n dl =
∫D
τ∇ · (∇u) dA.
Using mass conservation gives∫D
(ρ0utt − τ∆u) dA = 0,
which impliesρ0utt − τ∆u = 0.
Denoting c =√τ/ρ0, this can be written
utt = c2∆u,
which is the two-dimensional wave equation.
42

9.4 Laplace’s EquationIf the source term in the diffusion equation is constant, then the steady state equi-librium concentration is described by the diffusion equation with the time deriva-tive terms removed:
−∇ · (k∇u) = f.
When k is constant this reduces to the Poisson equation
−∆u = F
where F = f/k. The Poisson equation with no source term is Laplace’s equation
∆u = 0.
Similar equations arise as models of steady state heat flow. A membrane sub-jected to a transversal static load f(x) is modelled by a two-dimensional Poissonequation
−τ∆u = f.
Laplace’s and Poisson’s equations also arise as models of gravitational fields, elec-trostatic fields, stationary fluid flow, brownian motion, and many other phenom-ena.
Any function that satisfies Laplace’s equation is called a harmonic function.In one dimension, Laplace’s equation is uxx = 0, so one-dimensional harmonicfunctions are all of the form u(x) = A+Bx. Things get more interesting in higherdimensions, however! The following results holds in the one, two, and three (andhigher!) dimensional versions of Laplace’s equation.
Theorem 8 (Maximum Principle) If u is harmonic in a connected bounded openset Ω, and continuous in Ω = Ω∪∂Ω, then the maximum value of u is attained onthe boundary ∂Ω.
Proof. Let ε > 0 and v(x) = u(x) + ε∑N
i=1 x2i . If v has a maximum at a point
x ∈ Ω, the hessian matrix vxx = [ ∂2v∂xixj
] is negative semidefinite, which implies∂2v∂x2i≤ 0 for every i. But
∆v =∑i
∂2v
∂x2i
= ∆u︸︷︷︸=0
+2Nε > 0,
so v cannot have a maximum inside Ω. Because v is continuous, it has a maximumsomewhere in the compact set Ω, say at x∗ ∈ ∂Ω. Then, for all x ∈ Ω,
u(x) ≤ v(x) ≤ v(x∗) = u(x∗) + ε∑i
(x∗i )2 ≤ u(x0) + εmax
x∈∂Ω|x|2
where x0 ∈ ∂Ω is a point where u(x0) = maxx∈∂Ω u(x). Then taking ε → 0, wehave
u(x) ≤ u(x0) for all x ∈ Ω,
which completes the proof.
Corollary 1 (Minimum Principle) For u as in Theorem 1, the minimum value isattained on the boundary ∂Ω.
Proof. Apply the maximum principle to the harmonic function −u. 2
43

Example 1 Find the maximum value of f(x, y) = x2 − y2 in the unit diskx2 + y2 ≤ 1.Solution. Because ∆f = 0, the maximum occurs on the disk boundary. Using po-lar coordinates, f = cos2 θ− sin2 θ = cos(2θ) on the boundary, and the maximumvalue is 1, attained at the points (x, y) = (1, 0) and at (x, y) = (−1, 0). 2
Example 2 Prove that the Dirichlet problem
−∆u = f in connected bounded Ω, u = h on ∂Ω.
has at most one solution.Solution. If u1 and u2 are two solutions, their difference w = u1− u2 is harmonicin Ω and w = 0 on ∂Ω. By the maximum/minimum principle,
0 = minx∈∂Ω
w(x) ≤ w(x) ≤ maxx∈∂Ω
w(x) = 0,
for all x ∈ Ω, and so w ≡ 0, that is, u1 ≡ u2.An alternative solution is based on Green’s first identity:∫
∂Ω
w︸︷︷︸=0
∇w · n dA =
∫Ω
|∇w|2 + w ∆w︸︷︷︸=0
dV
Thus ∇w ≡ 0, so w is constant, and the constant is zero because w is continuousand is zero on the boundary. 2
The following result indicates that the laplacian is suitable for modelling isotropicphysical phenomena, in which there is no preferred direction. A rotation of thecoordinate axes corresponds to a linear transformation x′ = Bx with orthogonalB (that is, BTB = I) and det(B) = 1. (An orthogonal B with det(B) = −1models a rotation with reflection.)
Theorem 9 (Rotational invariance of laplacian) If u′(x′) = u(BTx′) with or-thogonal B then ∆′u′ = ∆u.
Proof. By the chain rule we have
∂u′
∂x′i=∑l
∂u
∂xl
∂xl∂x′i︸︷︷︸bil
and∂2u′
∂x′i∂x′j
=∑l
∑p
∂2u
∂xl∂xpbilbjp = (BuxxB
T )ij.
Then
∆′u′ = tr(u′x′x′) = tr(BuxxBT ) = tr(BTBuxx) = tr(uxx) = ∆u.
Theorem 10 (Mean value property) If u is harmonic in the ball D = x : |x−x′| = a then the value at the centre u(x′) is equal to the mean value on the ballboundary.
44

Proof. Moving the origin to x′, the mean value of u on the boundary of the threedimensional ball is given by
m(a) =
∫∂Du dA
A=
1
4πa2
∫ 2π
0
∫ π
0
u(a, θ, φ)a2 sin θ dθ dφ.
From Green’s first identity with v ≡ 14πa2 and ∆u = 0 we have
0 =
∫|x|=a
v∇u · n dA =1
4π
∫ 2π
0
∫ π
0
ur(a, θ, φ) sin θ dθ dφ = m′(a),
so that the mean value on the ball surface is independent of the ball’s radius.Taking a→ 0 givesm = u(0). The proof for one and two dimensions is similar. 2
According to the maximum principle (Theorem 1), harmonic functions attaintheir maximum on the boundary. Using the mean value property we can show thatthe maximum is not attained inside the region, unless the function is constant.
Corollary 2 If u is harmonic in an open connected region Ω, is continuous inΩ = Ω ∪ ∂Ω, and attains its maximum in Ω, then u is constant in Ω.
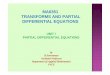
Section 2.4, Laplace’s Equation 47
x0
x1x2
xm
!
"x3
Figure 2.1: Diagram for Proof of Maximum Principle.
Proof. Suppose u attains its maximum M := max! u at a point x0 ! !.
We wish to show that at any other point xm ! ! we must have u(xm) = M.
Let the curve " " ! connect x0 and xm , and choose the finite set of points
x1, x2, . . . xm#1 on " to be centers of balls contained !, and arranged so that
the point xi+1 lies on the surface #Bi of the ball Bi centred at the previous
point xi . The values on #B0 are all less than or equal to M . But, by the
mean value property (Theorem 2.17) u(x0) must be equal to the average ofthe values on the ball’s surface, and so the surface values must all be equal to
M . In particular, u(x1) = M . With similar arguments we obtain u(xi) = M
for i = 2, 3, . . .m (Figure 2.1). The proof for the minimum is similar.
From Theorem 2.18 we can obtain the results of section 2.2.1 on con-
tinuous dependence on boundary data and monotonicity of solutions of the
Dirichlet problem.
2.4.4 Existence of Solution
This chapter has given several uniqueness results but has not yet said anything
about the existence of the solution. We close the chapter with a few words
about this.
The Dirichlet problem can in fact fail to have a solution if there are sharp
enough “spikes” that penetrate into the domain !. In the absence of such
spikes, however, a solution will exist; see [9, p.198] for details. Domains
encountered in applications are unlikely to cause trouble in this regard.
An alternative is to replace the PDE by an integral formulation of the
boundary value problem that doesn’t require so much smoothness in the
solution. Such variational or weak formulations are the starting point for the
theory of numerical methods such as the Finite Element Method.
Proof. Suppose u attains its maximumM := maxΩ u at a point x0 ∈ Ω. We wishto show that at any other point xm ∈ Ωwe must have u(xm) = M . Let the curveΓ ⊂ Ω connect x0 and xm, and choosethe finite set of points x1,x2, . . .xm−1 on Γto be centers of balls contained Ω, and ar-ranged so that the point xi+1 lies on the sur-face ∂Bi of the ball Bi centred at the previ-ous point xi. The values on ∂B0 are all less than or equal to M . But, by the meanvalue property u(x0) must be equal to the average of the values on the ball’s sur-face, and so the surface values must all be equal to M . In particular, u(x1) = M .With similar arguments we obtain u(xi) = M for i = 2, 3, . . .m.
x
y
z
r
φ
θ
In spherical coordinates the laplacian is
∆u =1
r2
(r2ur
)r
+1
r2 sin θ(uθ sin θ)θ +
1
r2 sin2 θuφφ
Harmonic functions in three dimensions that depend only on r satisfythe ODE (r2ur)r = 0, which has the general solution u(r) = c1r
−1 +c2.
In cylindrical polar coordinates the laplacian is
∆u =1
R
((RuR)R +
1
R(uθ)θ + (Ruz)z
).
Harmonic functions that depend only on distance R from the z-axis satisfy theODE (RuR)R = 0, which has the general solution u(R) = c1 ln(R) + c2.
45

Example 3 A circular membrane with a uniform transverse load and fixed bound-ary is modelled by ∆u = 1 in the domain x2+y2 < a2 with u = 0 on the boundary.Find the shape of the membrane.Solution. Assuming a solution of the form u(R), we have the ODER−1(RuR)R =1, which has the solution u(R) = c1 ln(R) + c2 + 1
4R2. Taking c1 = 0 (to ensure
the solution remains bounded on the z axis) and c2 = −a2/4 to ensure u(a) = 0,we have u(R) = (R2 − a2)/4.
Theorem 11 (Dirichlet’s Principle) Among all the functions w that satisfy w =h on ∂Ω, the one that minimizes the “energy” E(w) = 1
2
∫Ω|∇w|2 dV is har-
monic.
Proof. Let u = w = h on ∂Ω and ∆u = 0 in Ω. Then, with v = u− w, we have
E(w) = 12
∫Ω
|∇(u− v)|2 dV
= 12
∫Ω
(∇u−∇v) · (∇u−∇v) dV
= E(u) + E(v)−∫
Ω
∇u ·∇v dV
Green’s first identity gives∫Ω
∇u ·∇v dV =
∫∂Ω
v︸︷︷︸=0
∇u · n dA−∫
Ω
v ∆u︸︷︷︸=0
dV = 0,
so E(w) ≥ E(u). 2
The Dirichlet principle motivates the Rayleigh-Ritz method for computing anapproximate solution of the Dirichlet problem of Example 2. Choose functionsw0, w1, . . . , wn such that w0 = h and w1 = · · · = wn = 0 on ∂Ω, and considerthe linear combination w = w0 + c1w1 + · · ·+ cnwn. Then
E(w) = 12
∫Ω
(∇w0 +
n∑i=1
ci∇wi
)·(∇w0 +
n∑j=1
cj∇wj
)dV
= 12a− bTc + 1
2cTAc,
where a =∫
Ω|∇w0|2 dV , bi = −
∫Ω∇w0 ·∇wi dV , and Aij =
∫Ω∇wi ·∇wj dV .
This energy is minimized when c = A−1b, because
E(w) = 12a− bT (c− A−1b + A−1b) + 1
2(c− A−1b + A−1b)TA(c− A−1b + A−1b)
= 12(a− bTA−1b) + 1
2(c− A−1b)TA(c− A−1b),
and A is symmetric positive definite.
Example 4 Find an approximate solution to ∆u = 0 on the triangle (x, y) :x > 0, y > 0, 3x+ y < 3 with the boundary conditions
u(x, 0) = 0, u(0, y) = 3y − y2, u(x, 3− 3x) = 0.
46

0
1
01
230
1
2
xy
u
Solution. Withw0 = (3−3x−y)y andw1 = (3−3x−y)xywe have
b1 = −∫ 1
0
∫ 3−3x
0
∂w0
∂x
∂w1
∂x+∂w0
∂y
∂w1
∂ydy dx =
−9
20
A11 =
∫ 1
0
∫ 3−3x
0
(∂w1
∂x
)2
+
(∂w1
∂y
)2
dy dx =3
2
c1 = b1/A11 = − 3
10
so the approximate solution is w0 − 310w1 = y(3− 3x− y)(1− 0.3x).
47

10 Solving Two-Dimensional Laplace Equations
• Laplace equation boundary value problems in a disk, a rectangle, a wedge,and in a region outside a circle
10.1 Dirichlet Problem in a disk
Consider the two dimensional Laplace equation in the disk x2 + y2 < a2 withu = h on the boundary. The Laplace equation in polar coordinates (r, θ) is
(rur)r +1
r(uθ)θ = 0
A “separation of variables” trial solution u(r, θ) = R(r)Θ(θ) gives
R′′Θ +1
rR′Θ +
1
r2RΘ′′ = 0
which can be rearranged to
r2R′′
R+rR′
R= −Θ′′
Θ.
Equating both sides to the separation constant λ, we are left with two ODEs,
Θ′′ + λΘ = 0 (26)
andr2R′′ + rR′ − λR = 0. (27)
For λ 6= 0, the general solution of (26) is Θ(θ) = A cos√λθ + B sin
√λθ.
Substituting this into the periodic boundary conditions Θ(0) = Θ(2π) and Θ′(0) =Θ′(2π) gives the homogeneous equations
A(−1 + cos(2π√λ)) +B sin(2π
√λ) = 0
−A√λ sin(2π
√λ) +B
√λ(−1 + cos(2π
√λ)) = 0
This system of equations has a nontrivial solution (that is, a solution other thanA = B = 0) if the determinant of the coefficient matrix is zero. The determinantis 2√λ(1−cos(2π
√λ)), and the nonzero values of λ that give a nontrivial solution
are λn = n2 with n = 1, 2, . . .
For λ = 0, the general solution of (26) is Θ(θ) = A + Bθ, and the onlynontrivial periodic solution is Θ(θ) = A (nonzero constant).
Consider now the equation (27). For λ 6= 0, a trial solution of the formR(r) =rα gives
(α2 − λ)rα = 0,
which implies the solutions α = ±√λ = ±n. For λ = 0, (27) reduces to
r(rR′)′ = 0, which has the general solution R(r) = c1 ln r + c2.
48

Writing the solution as a linear combination of the solutions found above, wehave
u(r, θ) = c1 ln r + c2 +∑n≥1
(An cosnθ +Bn sinnθ)rn
+∑n≥1
(An cosnθ + Bn sinnθ)r−n (28)
To ensure continuity and boundedness at the origin, we set c1 = An = Bn = 0,leaving us with
u(r, θ) = 12A0 +
∑n≥1
(An cosnθ +Bn sinnθ)rn
where the constant term c2 has been renamed 12A0. At the boundary r = a we
haveu(a, θ) = 1
2A0 +
∑n≥1
(An cosnθ +Bn sinnθ)an = h(θ)
and the coefficents are determined by equating Anan and Bnan with the Fourier
series coefficients of h:
u(r, θ) =1
2π
∫ π
−πh(θ′) dθ′ +
∑n≥1
([1
π
∫ π
−πh(θ′) cosnθ′ dθ′
]cosnθ
+
[1
π
∫ π
−πh(θ′) sinnθ′ dθ′
]sinnθ
)(ra
)n(29)
Example 1 Find the steady-state temperature in a long cylinder of radius a ifthe upper half is kept at u = 100 and the lower half is kept at u = 0.
Solution. The boundary function is h(θ) = 50 + 50f(θ) where
f(θ) =
−1 −π < θ < 00 θ = 01 0 < θ < π.
θ
-1
1
-π π
In section 8 we derived the Fourier series
f(θ) =∑n≥1
2(1− (−1)n)
nπsin(nθ),
so the PDE solution can be written directly as
u(r, θ) = 50+50∑n≥1
2(1− (−1)n)
nπ
(ra
)nsin(nθ)
Plotting the sum of a large number of terms gives the above figure. 2
49

The series solution (29) for the Dirichlet problem in the disk can be written as
u(r, θ) =1
2π
∫ π
−πh(θ′)
[1 + 2
∑n≥1
(ra
)ncosn(θ − θ′)
]dθ′ (30)
Letting z = raei(θ−θ
′), the term in brackets can be written
1 +∑n≥1
zn + zn = 1 +z
1− z+
z
1− z=
1− zz(1− z)(1− z)
=1− |z|2
1 + |z|2 − (z + z)
=1− (r/a)2
1 + (r/a)2 − 2(r/a) cos(θ − θ′)
Substituting this into (30) gives the Poisson integral formula
u(r, θ) =1
2π
∫ π
−πh(θ′)
[a2 − r2
a2 + r2 − 2ar cos(θ − θ′)
]dθ′.
One application of this formula is to provide an alternative derivation of the meanvalue property: the value at r = 0 is 1
2π
∫ π−π h(θ′) dθ′, which is the average of u on
the circumference r = a.
10.2 Dirichlet Problem in a rectangle
a
b
y
x
u = g
u = 0
u = 0 u = 0uxx + uyy = 0
Consider the two dimensional Laplace equation ∆u = 0 inthe rectangle (0, a)× (0, b) with u(x, b) = g(x) and u = 0 onthe rest of the boundary. Substituting a solution of the formu(x, y) = X(x)Y (y) into uxx + uyy = 0 gives
X ′′Y +XY ′′ = 0,
which can be rearranged toX ′′
−X=Y ′′
Y.
Equating both sides to the separation constant λ, we are left with two ODEs,
X ′′ + λX = 0 (31)
andY ′′ − λY = 0. (32)
For λ 6= 0, the general solution of (31) is X = A cos√λx + B sin
√λx. Substi-
tuting this into the boundary conditions X(0) = 0 and X(a) = 0 gives A = 0and B sin(
√λa) = 0, and the nonzero values of λ that give a nontrivial solution
are λn = (nπ/a)2 with n = 1, 2, . . .. For λ = 0, the general solution of (31)is X(x) = A + Bx, and there is no nontrivial solution satisfying the boundaryconditions.
The general solution of (32) with λ = (nπ/a)2 is Y (y) = A cosh(nπy/a) +B sinh(nπy/a). The boundary condition Y (0) = 0 is satisfied by setting A = 0.
50

Writing the solution as a linear combination of the solutions found above, wehave
u(x, y) =∑n≥1
Bn sin(nπx/a) sinh(nπy/a)
At the boundary y = b, this is
u(x, b) =∑n≥1
Bn sin(nπx/a) sinh(nπb/a) = g(x).
The coefficients are obtained by equating Bn sinh(nπb/a) with the Fourier sineseries coefficients of g(x):
u(x, y) =∑n≥1
[2
a
∫ a
0
g(x′) sin(nπx′/a) dx′]
sin(nπx/a) sinh(nπy/a)
sinh(nπb/a)(33)
Example 2 Find the steady-state temperature in a long prismatic tube with squarea × a cross-section if the top face is kept at u = 1 and other three faces are keptat u = 0.Solution. The boundary function is g(x) = 1, whose Fourier sine series was foundin section 8 to be
g(x) =∑n≥1
2(1− (−1)n)
nπsin(nπx/a).
The Dirichlet problem solution is then
u(x, y) =∑n≥1
2(1− (−1)n)
nπ
sin(nπx/a) sinh(nπy/a)
sinh(nπ)
Plotting the sum of a large number of terms gives the above figure. 2
The solution for the general Dirichlet problem in the rectangle is found bysuperposition of (33) and solutions of similar problems:
• For u(x, 0) = h(x), and u = 0 elsewhere 00
0
h, the solution is
u(x, y) =∑n≥1
[2
a
∫ a
0
h(x′) sin(nπx′/a) dx′]
sin(nπx/a) sinh(nπ(b− y)/a)
sinh(nπb/a)
This is found by replacing y by b−y [the laplacian is invariant to reflection]and g by h in (33).
• For u(a, y) = k(y), and u = 0 elsewhere0
0
0
k , the solution is
u(x, y) =∑n≥1
[2
b
∫ b
0
k(y′) sin(nπy′/b) dy′]
sin(nπy/b) sinh(nπx/b)
sinh(nπa/b)
which is found by swapping x↔ y and a↔ b and replacing g by k in (33).
51

• for u(0, y) = j(y), and u = 0 elsewhere0
0
0
j , the solution is
u(x, y) =∑n≥1
[2
b
∫ b
0
j(y′) sin(nπy′/b) dy′]
sin(nπy/b) sinh(nπ(a− x)/b)
sinh(nπa/b).
10.3 Dirichlet-Neumann Problem in a wedge
ur = hu = 0
u = 0γ
Consider the two dimensional Laplace equation in the sector(r, θ) : 0 < θ < γ, r < a, with boundary conditionsu = 0 on the rays θ = 0 and θ = γ and a Neumann conditionur = h on the perimeter r = a. Assuming a solution of theform u(r, θ) = R(r)Θ(θ) and proceeding as for the disk, weobtain the ODEs (26) and (27). From the boundary conditions Θ(0) = Θ(γ) = 0we obtain Θ(θ) = sin(nπθ/γ) with n = 1, 2, . . . and R(r) = r±nπ/γ . Writing thesolution as a linear combination, we have
u(r, θ) =∑n≥1
Bn sin(nπθ/γ)rnπ/γ + Bn sin(nπθ/γ)r−nπ/γ
To ensure boundedness at the origin, we set Bn = 0, leaving
u(r, θ) =∑n≥1
Bn sin(nπθ/γ)rnπ/γ
Substituting this into the Neumann boundary condition gives
h(θ) = ur(a, θ) =∑n≥1
nπ
γBn sin(nπθ/γ)a
nπγ−1
and the coefficients are determined by equating nπγBna
nπγ−1 with the Fourier sine
coefficients of h(θ), leading finally to
u(r, θ) =∑n≥1
γa
nπ
(2
γ
∫ γ
0
h(θ′) sin(nπθ′/γ) dθ′)
sin(nπθ/γ)(ra
)nπ/γIn a nonconvex sector having γ > π, the term r
πγ−1 in the first term of
the series for ur is unbounded as r → 0, and so this solution does not, strictlyspeaking, satisfy the PDE — in fact, the problem does not have a solution (havingsecond derivatives continuous up to the boundary) in this case.
Example 3 Solve ∆u = 0 in a γ = π/2 sector with u = 0 on the rays andur = 1 on the perimeter r = a.Solution. We have
2
γ
∫ γ
0
h(θ′) sin(nπθ′/γ) dθ′ =2(1− (−1)n)
nπ
and so
u(r, θ) =∑n≥1
(1− (−1)n)a
n2πsin(2nθ)
(ra
)2n
.
Notice that Gibbs oscillation is not visible in theplot of the solution surface. 2
52

10.4 Dirichlet Problem in the region outside a circleConsider the two dimensional Laplace equation in the region x2 + y2 > a2 withu = h on the boundary and u bounded at infinity.
We can proceed as in section 10.1 up to formula (28). To ensure the solutionis bounded at infinity, we set c1, An and Bn to zero, leaving
u(r, θ) = 12A0 +
∑n≥1
(An cosnθ + Bn sinnθ)r−n
Imposing the boundary condition on the circle perimeter gives
h(θ) = u(a, θ) = 12A0 +
∑n≥1
(An cosnθ + Bn sinnθ)a−n
The coefficients are determined by equating a−nAn and and a−nBn to the Fouriercoefficients of h, leading to
u(r, θ) =1
2π
∫ π
−πh(θ′) dθ′ +
∑n≥1
([1
π
∫ π
−πh(θ′) cosnθ′ dθ′
]cosnθ
+
[1
π
∫ π
−πh(θ′) sinnθ′ dθ′
]sinnθ
)(ar
)n. (34)
An alternative derivation is to use the change of variables r′ = a2/r and u′(r′, θ) =u(a2/r′, θ). By the chain rule,
u′r′ =∂u′
∂r′=∂u
∂r
∂r
∂r′= − a2
(r′)2ur
and1
r′(r′u′r′)r′ =
1
r′(−a
2
r′ur)r′ =
r
a2(−rur)r
∂r
∂r′=(ra
)4 1
r(rur)r
and so∆′u′ =
1
r′(r′u′r′)r′ +
1
(r′)2(u′θ)θ =
(ra
)4
∆u.
Thus, if ∆′u′ = 0 inside the circle then ∆u = 0 outside it. The solution inside thecircle is (29) written with u′ and r′, and applying the change of variables to thissolution gives (34). Similarly, the Poisson integral formula for the disk interior istransformed to
u(r, θ) =1
2π
∫ π
−πh(θ′)
[r2 − a2
a2 + r2 − 2ar cos(θ − θ′)
]dθ′.
for the exterior.
Example 4: Stationary flow past a circular cylinder The steady-state two-dimensional velocity field for the irrotational flow of an incompressible inviscidconstant-density fluid is given by ψyi−ψxj, where ψ is a harmonic function calledthe stream function. Because the velocity is orthogonal to ∇ψ, the lines of con-stant ψ (called streamlines) are tangential to the velocity field.
53

Find the streamlines for flow past a long circular cylinder of radius a whoseaxis is the z axis, assuming the flow far from the cylinder to be constant in the xdirection, that is, ψ = Uy.Solution. The stream function satisfies the two dimensional Laplace equation onthe exterior of the circle r = a. The radial component of the velocity is zero onthe cylinder boundary, that is, the cylinder boundary is a streamline, which givesthe boundary condition ψ =constant (say, zero) for r = a. Substituting this intothe general solution (28) we find
c1 ln a+ c2 = 0
Anan + Ana
−n = 0
Bnan + Bna
−n = 0
so that
ψ(r, θ) = c1 lnr
a+∑n≥1
(rn − a2n
rn
)(An cosnθ +Bn sinnθ)
In order to satisfy the condition ψ = Uy = Ur sin θ at r → ∞ we set B1 = Uand the remaining An and Bn coefficients to zero, leaving
ψ(r, θ) = c1 lnr
a+ U
(1− a2
r2
)r sin θ.
Here are streamlines for various c1 values, which correspond to different cylinderclockwise rotation speeds:
c1 = 0 c1 = Ua
c1 = 2Ua c1 = 2.1Ua
The closely spaced streamlines correspond to regions of low pressure and indicatethe presence of a net “lift” force in the y direction (Magnus effect).
54

11 Green’s Functions
11.1 Green’s Function for One-Dimensional EquationThe Green’s function provides a complete solution to a boundary value problem inmuch the same way that an inverse matrix provides a general solution for systemsof linear equations. In this section the Green’s function is introduced in the contextof a simple one-dimensional problem.
Some of the proofs use the identity∫ b
a
(uv′′ − vu′′) dx =∣∣∣bauv′ − vu′.
This can be obtained by integrating (uv′ − vu′)′ = uv′′ − vu′′.A singularity functionK(x, ξ) of the operatorL defined byLu(x) = −u′′(x)−
c(x)u(x) is characterised by three properties:
1. K is continuous;
2. Kx is continuous in x < ξ and in x > ξ, and Kx(x+, x)−Kx(x
−, x) = −1;
3. Kxx is continuous and LK = 0 for x 6= ξ.
Note that the three properties do not define a singularity function uniquely: ifK is a singularity function then so is K +H , where H(x, ξ) is any function withcontinuous H and Hx and with LH = 0.
The Green’s function G(x, ξ) for the operator L and the domain (a, b) withDirichlet boundary conditions is the singularity function that satisfies the homo-geneous Dirichlet conditions G(a, ξ) = 0 and G(b, ξ) = 0. The Green’s functionprovides the solution to the boundary value problem with Dirichlet boundary con-ditions:
Theorem 12 If u satisfies the differential equation u′′ + cu = −f on (a, b) andthe boundary conditions u(a) = 0, u(b) = 0, then
u(ξ) =
∫ b
a
G(x, ξ)f(x) dx (35)
for all ξ ∈ (a, b).
Proof. Letting v(x) = G(x, ξ), we have∫ b
a
vf dx =
∫ ξ−
a
uv′′ − vu′′ dx+
∫ b
ξ+uv′′ − vu′′ dx
=∣∣∣ξ−auv′ − vu′ +
∣∣∣bξ+uv′ − vu′
=∣∣∣bauv′ − vu′︸ ︷︷ ︸
0
−u(ξ)∣∣∣ξ+ξ−v′︸ ︷︷ ︸
−1
+∣∣∣ξ+ξ−vu′︸ ︷︷ ︸0
,
which completes the proof. 2
55

The load (or source) function f in the differential equation −u′′ − cu = fcan be thought of as a superposition of “point” loads f(x) =
∑δ(x − ξ)f(ξ)dξ,
where δ(x − ξ) is concentrated at ξ and has unit magnitude (i.e.∫δ dx = 1).
Then formula (35) represents the solution as a weighted sum of Green’s functions,where each G(ξ, x) is the solution to −u′′(x) = δ(x − ξ). The Green’s functioncan thus be thought of as the “response” to a unit point load.
The Green’s function also provides the solution of the boundary value problemwith nonhomogeneous boundary conditions:
Theorem 13 The solution of u′′ + cu = 0 with boundary conditions u(a) = h0
and u(b) = h1 satisfies
u(ξ) = Gx(a, ξ)h0 −Gx(b, ξ)h1 (36)
for all ξ ∈ (a, b).
Proof. Denoting v(x) = G(x, ξ), we have
0 =
∫ ξ−
a
(uv′′ − vu′′) dx+
∫ b
ξ+(uv′′ − vu′′) dx
=∣∣∣ξ−a
(uv′ − vu′) +∣∣∣bξ+
(uv′ − vu′)
=∣∣∣ba(uv′ − vu′)−
∣∣∣ξ+ξ−
(uv′ − vu′)
=∣∣∣bauv′ + u(ξ),
which completes the proof. 2
The following result tells us that the response at x to a point load applied at ξis equal to the response at ξ to a point load applied at x.
Theorem 14 (Reciprocity Principle) G(x, ξ) = G(ξ, x) for all x, ξ ∈ (a, b).
Proof. Let y and η be distinct points in (a, b) with y < η, let u(x) = G(x, η) andv(x) = G(x, y). Then
0 =
∫ y−
a
uv′′ − vu′′ dx+
∫ η−
y+uv′′ − vu′′ dx+
∫ b
η+
uv′′ − vu′′ dx
=∣∣∣y−auv′ − vu′ +
∣∣∣η−y+uv′ − vu′ +
∣∣∣bη+uv′ − vu′
=∣∣∣bauv′ − vu′︸ ︷︷ ︸
0
−∣∣∣y+y−uv′ − vu′︸ ︷︷ ︸−u(y)
−∣∣∣η+
η−uv′ − vu′︸ ︷︷ ︸v(η)
,
leaving u(y) − v(η) = 0, that is, G(y, η) − G(η, y) = 0. The proof for y > η issimilar. 2
As a consequence of Theorem 2, we can rewrite formula (35) as
u(x) =
∫ b
a
G(x, ξ)f(ξ) dξ.
56

and formula (36) as
u(x) = Gξ(x, a)h0 −Gξ(x, b)h1.
A singularity function of − d2
dx2 is given by
K(x, ξ) = −12|x− ξ|,
as can readily be verified. The Green’s function for the interval (0, 1) can be
0
10
10
0.25
x
ξ
G
found by solving Hxx = 0 with boundary conditionsH(0, ξ) = −K(0, ξ) and H(1, ξ) = −K(1, ξ), thensetting G = K +H . This yields
G(x, ξ) = −12|x− ξ|+ 1
2(x+ ξ)− xξ
=
(1− x)ξ for ξ < x(1− ξ)x for x < ξ.
The solution of −u′′ = f satisfying u(0) = h0 and u(1) = h1 is given by
u(x) =
∫ 1
0
G(x, ξ)f(ξ) dξ +Gξ(x, 0)h0 −Gξ(x, 1)h1
= (1− x)
∫ x
0
ξf(ξ) dξ + x
∫ 1
x
(1− ξ)f(ξ) dξ + (1− x)h0 + xh1.
11.2 Green’s Function for Two-Dimensional Poisson EquationNow we go through the same discussion in two dimensions. Some of the proofsuse Green’s second identity∫
Ω
u∆v − v∆u dA =
∫∂Ω
(u∇v − v∇u) · n dl,
This can be derived by writing Green’s first identity twice, with u and v inter-changed the second time, and subtracting.
A singularity function K(x,x′) of the operator −∆ is characterised by thethree properties
1. For any fixed x′, limε→0
∫∂B′ε
K(x,x′) dl = 0, where B′ε denotes the radius-ε
disk centred at x′;
2. For any fixed x′, limε→0
∫∂B′ε
∇K(x,x′) · n dl = −1, where n denotes the
outward unit normal to B′ε;
3. K is harmonic as a function of x for x 6= x′.
Note that these three properties do not define a singularity function uniquely:if K is a singularity function then so is K + H , where H(x,x′) is any functionthat is harmonic as a function of x.
57

A singularity function of −∆ is given by
K(x,x′) =−1
2πln |x− x′|. (37)
This assertion can be verified as follows. Without loss of generality we can takex′ = 0. In polar coordinates, we have K = −1
2πln r with r = |x|, which is
harmonic in R2 \ 0 (see section 9.4). Also,∫∂B′ε
K dl =−1
2π
∫ 2π
0
ln ε · ε dθ = −ε ln ε→ 0
and (because∇K · n = ∂K/∂r)∫∂B′ε
∇K · n dl =−1
2π
∫ 2π
0
1
ε· ε dθ = −1.
The Green’s function for −∆ and a domain Ω with Dirichlet boundary con-ditions is a singularity function that satisfies G(x,x′) = 0 for x ∈ ∂Ω. TheGreen’s function provides the solution to the Poisson equation with homogeneousDirichlet boundary conditions:
Theorem 15 If −∆u = f in Ω and u = 0 on ∂Ω then
u(x′) =
∫Ω
G(x,x′)f(x) dA (x′ ∈ Ω). (38)
Proof. Letting v(x) = G(x,x′), we have∫Ω\B′ε
vf dA =
∫Ω\B′ε
u∆v − v∆u dA
=
∫∂Ω
(u∇v − v∇u) · n dl︸ ︷︷ ︸0
−∫∂B′ε
(u∇v − v∇u) · n dl
≈ −u(x′)
∫∂B′ε
vn dl︸ ︷︷ ︸→−1
+
∫∂B′ε
vun dl,
and the second term goes to zero because
min∂B′ε
un ·∫∂B′ε
v dl︸ ︷︷ ︸→0
≤∫∂B′ε
vun dl ≤ max∂B′ε
un ·∫∂B′ε
v dl︸ ︷︷ ︸→0
,
which completes the proof. 2
The formula (38) represents the solution as the superposition of Green’s func-tions, which can be thought of as “point source responses”. The following resulttells us that the response at x to a point source located at x′ is equal to the responseat x′ to a point source located at x.
Theorem 16 (Reciprocity Principle) G(x,x′) = G(x′,x) for x 6= x′.
58

Proof. Let y and y′ be distinct points in Ω, let Bε and B′ε denote ε-radius diskscentred at y and y′, and let u(x) = G(x,y′) and v(x) = G(x,y). Then
0 =
∫Ω\B′ε\Bε
u∆v − v∆u dA
=
∫∂Ω
(u∇v − v∇u) · n dl︸ ︷︷ ︸0
−∫∂Bε
” −∫∂B′ε
”
≈ −u(y)
∫∂Bε
∇v · n dl︸ ︷︷ ︸→−1
+
∫∂Bε
vun dl︸ ︷︷ ︸→0
−∫∂B′ε
uvn dl︸ ︷︷ ︸→0
+ v(y′)
∫∂B′ε
un dl︸ ︷︷ ︸→−1
,
leaving us with u(y)− v(y′) = 0, that is, G(y,y′)−G(y′,y) = 0. 2
As a consequence of Theorem 4, formula (38) can be written as
u(x) =
∫Ω
G(x,x′)f(x′) dA′.
The singularity function (37) is called the free-space Green’s function for Pois-son’s equation. It is a Green’s function for Poisson’s equation with the boundarycondition u(x) ∼ 1
|x| as |x| → ∞. The free-space Green’s function doesn’t satisfythis boundary condition, but the boundary condition does ensure that the term∫
∂Ω
(u∇v − v∇u) · n dl
in the proof of Theorem 3 goes to zero when Ω is taken to be a disk of radius Rcentred at x′ and R→∞.
The method of images can be used to find Green’s functions for other domains.For example, using the idea that a unit point source located at x′ = (x′, y′) withy′ > 0 and a point source of strength−1 located at (x′,−y′) will cancel each otheron the x-axis, we find the Green’s function
G(x,x′) =−1
2πln((x− x′)2 + (y − y′)2
)12 +
1
2πln((x− x′)2 + (y + y′)2
)12
for the Poisson equation in the half-plane y > 0.Using similar ideas, one can derive the formula for Green’s function for the
origin-centred disk of radius a as
G(x,x′) =−1
2πln |x− x′|+ 1
2πln
∣∣∣x′|x|2 − xa2∣∣∣
a|x|.
Representing x and x′ in polar coordinates as (r, θ) and (ρ, θ′), and using thecosine law |x − x′|2 = |x|2 + |x′|2 − 2|x||x′| cos γ with γ = θ − θ′, the diskGreen’s function can be written
G(x,x′) =1
2πln
√a4 + r2ρ2 − 2a2rρ cos γ
a2(r2 + ρ2 − 2rρ cos γ). (39)
59

The Green’s function G((x, y), (0, 0.5)) for the half-plane and the unit-radiusdisk are shown below.
−1
0
1
00.5
1
20
0.1
0.2
0.3
xy
G
−1
0
1
−1
0
10
0.1
0.2
0.3
0.4
xy
G
The Green’s function also provides the solution of Laplace’s equation withnonhomogeneous Dirichlet boundary conditions:
Theorem 17 If ∆u = 0 in Ω and u = h on ∂Ω then
u(x′) = −∫∂Ω
h(x)∇G(x,x′) · n dl.
Proof. Similar to the proof of Theorem 4. 2
For the half-plane y > 0 the unit normal points in the negative y direction andwe have
∂G
∂n
∣∣∣∣∂Ω
= −∂G∂y
∣∣∣∣y=0
=−y′/π
(x− x′)2 + (y′)2.
The solution of Laplace’s equation ∆u = 0 in the half-plane with u(x, 0) = h(x)is therefore
u(x′, y′) =1
π
∫ ∞−∞
y′h(x)
(x− x′)2 + (y′)2dx.
For the origin-centred disk, the unit outward normal points in the radial direc-tion and we have
∂G
∂n
∣∣∣∣∂Ω
=∂G
∂r
∣∣∣∣r=a
=−1
2πa× a2 − ρ2
a2 + ρ2 − 2aρ cos γ.
The solution of Laplace’s equation on the disk with u = h on the boundary r = ais therefore
u(ρ, θ′) =1
2π
∫ 2π
0
(a2 − ρ2)h(θ)
a2 + ρ2 − 2aρ cos(θ − θ′)dθ,
which is Poisson’s integral formula (section 10.1).
11.3 Green’s functions from eigenfunctionsThe Poisson problem can also be solved by the method of eigenfunctions. Tointroduce the technique, we start with a one-dimensional problem.
60

Consider the differential equation −u′′ = f with boundary conditions u(0) =0, u(a) = 0. The associated eigenvalue problem is φ′′ + λφ = 0 with the sameboundary conditions. The eigenvalues and eigenfunctions are
λm =m2π2
a2, φm(x) = sin
mπx
a.
Substituting a trial solution of the form∑
m′≥1Am′φm′(x) into the differentialequation, multiplying through by φm(x), and integrating gives
Amλm
∫ a
0
sin2 mπx
adx︸ ︷︷ ︸
a/2
=
∫ a
0
f(x) sinmπx
adx,
Thus the Am are 1λm× the Fourier sine coefficients of f , and the solution at a point
ξ ∈ (0, 1) is
u(ξ) =
∫ a
0
f(x)
[∑m≥1
2a
m2π2sin
mπx
asin
mπξ
a
]dx.
Comparing this with formula (35), we deduce the Green’s function to be the termin brackets, that is,
G(x, ξ) =∑m≥1
2a
m2π2sin
mπx
asin
mπξ
a.
When a = 1, this is the Fourier sine expansion of the Green’s function presentedin section 1.
Next, consider the two-dimensional Poisson equation −∆u = f on the do-main (0, a) × (0, b), with u = 0 on the boundary. The associated eigenvalueproblem is ∆u + λu = 0, with the same boundary conditions. Assuming a solu-tion of the form u(x, y) = X(x)Y (y) yields, with α2 as separation constant, thetwo eigenvalue problems
X ′′ + α2X = 0, Y ′′ + (λ− α2)Y = 0
with homogeneous boundary conditions X(0) = X(a) = Y (0) = Y (b) = 0. Theeigenfunctions of the one-dimensional problems are
Xm(x) = sinmπx
a, Yn(y) = sin
nπy
b.
and the eigenvalues are
λmn = π2
(m2
a2+n2
b2
).
Substituting a trial solution of the form∑
m′≥1
∑n′≥1Am′,n′Xm′(x)Yn′(y) into
the Poisson equation, multiplying through by XmYn, and integrating gives
Amnλmn
∫ a
0
sin2 mπx
adx︸ ︷︷ ︸
a/2
∫ b
0
sin2 nπy
bdy︸ ︷︷ ︸
b/2
=
∫ b
0
∫ a
0
f(x, y) sinmπx
asin
nπy
bdx dy
61

Thus the Amn are 1λmn× the two-dimensional Fourier sine coefficients of f , and
the solution at a point x′ is
u(x′, y′) =
∫ a
0
∫ b
0
f(x, y)G(x, y, x′, y′) dx dy
with
G(x, y, x′, y′) =4ab
π2
∑m≥1
∑n≥1
1
m2b2 + n2a2sin
mπx
asin
nπy
bsin
mπx′
bsin
nπy′
b.
The Green’s function G(x, y, a/2, a/4) for a square domain is plotted below.
0
0.5
1
00.25
10
0.1
0.2
0.3
x/ay/a
G
62