Embed Size (px)
Citation preview

OPTIMAL RESOURCE ALLOCATION IN WIRELESS COMMUNICATIONS
SUBJECT TO SEVERAL POWER AND ENERGY CONSTRAINTS
A Thesis
Submitted to the Graduate School
of the University of Notre Dame
in Partial Fulfillment of the Requirements
for the Degree of
Master of Science
in
Electrical Engineering
by
Mostafa Khoshnevisan,
J. Nicholas Laneman, Director
Graduate Program in Electrical Engineering
Notre Dame, Indiana
April 2011

c© Copyright by
Mostafa Khoshnevisan
2011
All Rights Reserved

OPTIMAL RESOURCE ALLOCATION IN WIRELESS COMMUNICATIONS
SUBJECT TO SEVERAL POWER AND ENERGY CONSTRAINTS
Abstract
by
Mostafa Khoshnevisan
It is known that adaptive power and rate allocation is a useful technique for
combating channel variations induced by multipath fading in wireless systems.
We consider several fading channel models for which we aim to optimize a perfor-
mance metric subject to various power and energy constraints. First, we find the
general structure of optimal or suboptimal power policies in order to maximize
the ergodic capacity subject to various combination of short-term, long-term, and
per-antenna power constraints in multiple-input multiple-output (MIMO) wire-
less systems. The power policies depend upon the ratio of the power constraints.
Furthermore, we characterize the conditions for which one or more power con-
straints dominates and the others can be ignored. Next, we specialize the results
to Rayleigh fading. An important observations in this case is that the short-term
power constraint is more relevant in the low SNR regime. Therefore, a system
designer can ignore a short-term power constraint that is larger than a long-term
power constraint for large values of average SNR’s. Finally, we consider an energy
harvesting wireless system, and study rate allocation policies to minimize a delay
criterion, e.g., average delay in the data buffer or probability of overflow, subject
to the hard power constraints imposed by the available energy.

To My Lovely Aunt Fereshteh
Whom I Lost This Year
and to Her Nice Husband, Mahmoud
and Her Adorable Children, Amin and Sara
ii

CONTENTS
FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . vi
CHAPTER 1: INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . 11.1 Power Constraints and Their Practical Importance . . . . . . . . 11.2 Outline and Summary of Contributions . . . . . . . . . . . . . . . 6
CHAPTER 2: BACKGROUND . . . . . . . . . . . . . . . . . . . . . . . . 92.1 Throughput-Based Objective Functions . . . . . . . . . . . . . . . 92.2 Delay-Based Objective Functions . . . . . . . . . . . . . . . . . . 17
CHAPTER 3: LONG-TERM, SHORT-TERM, AND PER-ANTENNA POWERCONSTRAINTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.1 Channel Model and Problem Statement . . . . . . . . . . . . . . . 213.2 SISO Channels . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3 MIMO Channels . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3.1 Long-Term and Short-Term Power Constraints . . . . . . . 273.3.2 Long-Term and Per-Antenna Power Constraints . . . . . . 333.3.3 Long-Term, Short-Term, and Per-Antenna Power Constraints 36
3.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
CHAPTER 4: SPECIALIZING TO RAYLEIGH FADING . . . . . . . . . 424.1 Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.1.1 SISO and MISO . . . . . . . . . . . . . . . . . . . . . . . . 424.1.2 MIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2 Numerical Results and Discussion . . . . . . . . . . . . . . . . . . 494.2.1 SISO and MISO . . . . . . . . . . . . . . . . . . . . . . . . 494.2.2 MIMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
iii

CHAPTER 5: HARD POWER CONSTRAINTS IN ENERGY HARVEST-ING SYSTEMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.1 Model and Problem Statement . . . . . . . . . . . . . . . . . . . . 625.2 Main Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 675.3 Multiple Access: Separate and Cooperative Users . . . . . . . . . 72
5.3.1 Separate Users . . . . . . . . . . . . . . . . . . . . . . . . 735.3.2 Cooperative Users . . . . . . . . . . . . . . . . . . . . . . 76
5.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
CHAPTER 6: CONCLUSION . . . . . . . . . . . . . . . . . . . . . . . . . 796.1 Summary of Contributions . . . . . . . . . . . . . . . . . . . . . . 796.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
BIBLIOGRAPHY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
iv

FIGURES
2.1 Illustration of water-filling in time . . . . . . . . . . . . . . . . . . 11
2.2 Illustration of modified water-filling in time . . . . . . . . . . . . . 15
2.3 The system model in [22] . . . . . . . . . . . . . . . . . . . . . . . 16
2.4 The system model in [4] . . . . . . . . . . . . . . . . . . . . . . . 18
2.5 The system model in [30] . . . . . . . . . . . . . . . . . . . . . . . 19
3.1 Illustration of the optimal power allocation for a 2× 2 MIMO system 31
4.1 The value of αmax, the threshold separating Cases 2 and 3, versusaverage SNR γ for SISO and MISO systems with Rayleigh fading 50
4.2 Ergodic capacity versus average SNR for MISO systems with Rayleighfading, Pmax = 20(13dB) and N0 = 1, and n = 2, 10. . . . . . . . . 52
4.3 Ergodic capacity versus average SNR for MISO systems with Rayleighfading, n = 2 and α =∞ and α = 1. . . . . . . . . . . . . . . . . 54
4.4 The value of αmax, the threshold separating Cases 2 and 3, versusAverage SNR per parallel channel ( P
mN0) for MIMO systems with
Rayleigh fading. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.5 Ergodic capacity versus average SNR per parallel channel ( PmN0
) for2× 2 MIMO systems with Rayleigh fading. . . . . . . . . . . . . . 57
5.1 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2 An example of feasible power region . . . . . . . . . . . . . . . . . 74
v

ACKNOWLEDGMENTS
I am indebted to many people for making this thesis possible. Greatest grat-
itude goes to my advisor, Dr. J. Nicholas Laneman, who has been a tremendous
source of inspiration, guidance, and encouragement. I truly appreciate the price-
less freedom he provided in choosing my research’s topic. The productive sug-
gestions he offered in both the group and individual meetings were certainly the
main motivation for me to start and complete this work.
The friendly and nice environment of the university of Notre Dame, especially
the JNL group, made my graduate life enjoyable. I would like to thank Brian
Dunn, Michael Dickens, Glenn Bradford, Ebrahim MolavianJazi, Utsaw Kumar,
Zhanwei Sun, and Peyman Hesami. I have also benefited a lot from the theoretical
discussions that I had with the members of the group.
Finally, I would like to express my especial thanks to my family for their love
and support. My warm feelings and deep thanks are for my father, mother, sister,
and grandparents.
vi

CHAPTER 1
INTRODUCTION
In wireless systems, it is of great importance to adaptively allocate resources
such as power or rate in order to maximize a performance metric and at the same
time make sure to not violate the constraints imposed by rules and regulations
or system design limitations. The goal of this thesis is to precisely formulate a
variety of constraints and limitations in real-world systems and study the optimal
resource allocations for such systems. Optimizing a desired performance metric
subject to simultaneous power constraints with the assumption of channel state
information (CSI) at both the receiver and transmitter forms the core of this thesis.
In this chapter, we first discuss the importance of each of the power constraints
we consider in the thesis, and then summarize our contributions.
1.1 Power Constraints and Their Practical Importance
In real-world wireless communication systems, there are several important lim-
itations on the transmitter and its transmitted signal that might vary according
to the application. A combination of some or all of these constraints might be
necessary for a practical system.
One limitation results from the battery life of the mobile, which is captured by
long-term power constraints. A long-term power constraint can be mathematically
1

stated in the time-domain as
1
T1
∫ T1
0
NT∑k=1
x2k(t) dt ≤ P , (1.1)
where xk(t) is the output signal of the kth antenna at time t, and NT is the
number of antennas at the transmitter. The period of time T1 is assumed to be
large enough such that it contains many coherence times of the fading channel,
allowing the time-averaged long-term power constraint in (1.1) to be expressed in
terms of ensemble average over the Gaussian codewords and also over the fading
coefficients. This power constraint is meaningful if the mobile is equipped with
a battery that can be charged periodically with period T1, since in this case the
energy constraint imposed by the available energy in the battery of the mobile
can be expressed as the long-term power constraint in (1.1).
Another limitation results from regulations and rules that prevent the trans-
mitter from having an arbitrary power level due to environmental safety as well
as interference prevention. According to the Federal Communication Commis-
sion (FCC), the transmit power in any time duration should not exceed a certain
amount depending on the application, frequency, height of the antenna, popula-
tion of that area per square mile, and so on [1].
This regulatory constraint is captured by short-term power constraints, and it
can be mathematically stated in the time-domain as
1
T2
∫ T2
0
NT∑k=1
x2k(t) dt ≤ Pmax, (1.2)
where T2 � T1 is the shorter period of time over which the input power is
measured. With the block-fading channel model considered in this thesis, T2 is
2

assumed to be the block length, and T1 is assumed to be the channel coding length.
Thus, the time average (1.2) is taken over only a single block and the inequality
should hold for each block.
The short-term power constraint described above mathematically is consistent
with FCC rules. The Electronic Code of Federal Regulations (e-CFR) contains
the following rule [1, Title 47, Part15, D]: “the peak power output as measured
over an interval of time equal to the frame rate or transmission burst of the
device under all conditions of modulation. Usually this parameter is measured
as a conducted emission by direct connection of a calibrated test instrument to
the equipment under test”. We can infer from this rule that the power constraint
should be imposed at the transmitter instead of the receiver or any intermediate
node between the transmitter and receiver in the category of this regulation,
which is the scenario we consider. Also, from the general technical requirements
of those regulations “peak transmit power must be measured over any interval
of continuous transmission using instrumentation calibrated in terms of an rms-
equivalent voltage” [1, Title 47, Part 27].
Additionally, the power constraint is based on a measurement of the maxi-
mum conducted output power [1, Title 47, Part15, C], which is defined as the
total transmit power delivered to all antennas and antenna elements averaged
across all symbols in the signaling alphabet when the transmitter is operating at
its maximum power level. The FCC regulations also emphasize that “The average
must not include any time intervals during which the transmitter is off or is trans-
mitting at a reduced power level” [1, Title 47, Part15, C]. Other than the FCC,
Out Of Band (OOB) emission requirements set by the International Telecommu-
nication Union (ITU) [23] can impose a similar short-term power constraint on
3

the input power.
It is important to note that FCC regulations are very broad and have different
categories, such as licensed and unlicensed communication, or intentional and
unintentional radiation, and are usually expressed as a spectrum mask constraint.
The rules that we outlined above arise in different categories of FCC regulations.
What we consider as the short-term power constraint is a simplified constraint,
which puts a limitation on the maximum transmission power level.
Before turning our attention to another limitation, note that more precise
terminologies for these first two constraints would be long-term average and short-
term average power constraints. As it can be seen mathematically in Chapter 3,
for the long-term average power constraint, the average is taken over both the
codewords and channel fading coefficients, while for the short-term average power
constraint, the average is taken only over the codewords and the constraint applies
to each channel fading coefficient. We use terminology for the power constraints
from [7], in which the authors study the delay-limited capacity subject to long-
term power constraint, short-term power constraint, or both.
A third limitation results from the practical considerations for radio design,
which is captured by the per-antenna power constraint and prevents the ampli-
fier at each transmit antenna from distortions or nonlinearity by bounding the
dynamic range of the power at each antenna [21]. This constraint can be stated
mathematically in the time-domain as
1
T2
∫ T2
0
x2k(t) dt ≤ P , k = 1, 2, ..., NT , (1.3)
i.e., without the summation over antennas in (1.2). In principle, per-antenna
power constraints can be specified as either long- or short-term constraints. How-
4

ever, we only consider short-term per-antenna power constraints, since long-term
per-antenna constraints are not important in practical system design.
In many scenarios, all of the above power constraints should be taken into
account. In Chapters 3 and 4, we consider the ergodic capacity of the channel as
the objective function, and aim to maximize it subject to long-term, short-term,
and per-antenna power constraints assuming that CSI is available at both the
transmitter and receiver.
Finally, in some practical situations, instead of long-term power constraints,
we should consider energy constraints. This can happen if the device has not
the ability of getting fully recharged periodically. In energy harvesting wireless
systems, the users communicate with each other in a fading environment and
they harvest energy from a variety of sources and store it in an energy buffer such
as a capacitor or battery. In such systems, the input power is subject to hard
power constraints, i.e., the amount of energy consumed at each instant should not
exceed the amount of energy harvested in the energy buffer, which in the case of
single-input single-output (SISO) systems can be stated as
∫ (m+1)T2
mT2
x2(t) dt ≤ Eremm , m = 0, 1, ..., (1.4)
where T2 is the length of the block as before, and Eremm is the amount of energy
remained in the energy buffer at time mT2. In (1.4), we assume that energy arrives
into the energy buffer only at the start of each fading block. It is clear that in
energy harvesting systems, long-term power constraints are not relevant.
Energy harvesting has attracted considerable attention recently due to its
cheap, green, renewable, and naturally-presented source of energy. Solar, ther-
mal, kinetic, and wind are examples of such sources of energy. Energy harvesting
5

systems have a well-known application in powering low-energy electronics for wire-
less sensor networks. We consider a system model in which data and energy arrives
randomly due to a data and an energy arrival process and are stored in the data
and energy buffer, respectively. In the described system, the question then natu-
rally arises how we should spend the harvested energy to transmit the bits in the
data buffer for a given objective function. In addition to ergodic capacity, delay
is an important performance metric in wireless communications. Therefore, one
might optimize over all power policies in order to minimize delay subject to the
hard power constraints, which is the subject of Chapter 5.
1.2 Outline and Summary of Contributions
Chapter 2 reviews the literature and related works. In Chapter 3, we study
the general structure of optimal and suboptimal power allocation to maximize
the ergodic capacity subject to a combination of long-term, short-term, and per-
antenna power constraints with the assumption of CSI at both the transmitter
and the receiver. We consider SISO, multiple-input single-output (MISO), and
multiple-input multiple-output (MIMO) systems. We also characterize the situa-
tions for which one or more power constraints dominates and the others can be
ignored. The general structure of the power allocation policies depend upon the
ratio of the power constraints, number of antennas, and average signal-to-noise-
ratio (SNR) of the system.
In Chapter 4, we specialize the results of Chapter 3 to Rayleigh fading and
provide numerical results that illustrate the SNR regimes in which one or more
of the power constraints can be ignored. For each channel model we consider, we
quantify these regimes. Furthermore, these numerical results suggest that if the
6

input power is subject to long- and short-term power constraints, a short-term
power constraint that is larger than a long-term power constraint does not signifi-
cantly impact the ergodic capacity of the channel, for large average SNRs in MISO
systems and for all plotted average SNRs in MIMO systems. In other words, if
the short-term power constraint is larger than the long-term power constraint, the
difference between the capacity of a Rayleigh fading channel with optimal power
allocation subject to the long-term power constraint only and the capacity under
both long- and short-term power constraints is relatively small. This observation
suggests that some rules imposed by the FCC do not really constrain the sys-
tem design in the high SNR regimes for Rayleigh fading model, if the required
long-term power constraint stays less than the short-term power constraint.
In Chapter 5, we consider an energy harvesting wireless system in which the
data and energy arrive randomly due to different arrival processes, and the trans-
mitter adapts the transmission rate and power based on CSI and the state of data
and energy buffers such that the hard power constraints are satisfied. Two differ-
ent delay-based objective functions are considered in this part of the thesis. One
is the average delay incurred by the data, where the average is taken over all the
random processes in the system, i.e., data arrivals, energy arrivals, and the fading
process. When we consider this objective function, we assume that the buffer size
is infinite. Another objective function is the probability of overflow of the data
buffer, since the size of such buffers are limited in practice. If the size of the data
buffer is finite, then the probability that the buffer is full is a function of the buffer
size. Each of these objective functions can be expressed as an average cost for the
data buffers. With these assumptions, we prove that if the average rate of the
data arrivals is larger than a certain threshold, then the probability of overflow
7

is lower bounded by a constant, and the average delay is infinite when there is
no limitation on the buffer size. This threshold is basically the maximum average
rate of data subject to the energy constraints while the data buffer is removed.
On the other hand, if the average rate of the data arrivals is smaller than this
threshold and the buffer size is L, then we prove that there exists a sequence of
simple policies such that the probability of overflow goes to zero with a fast rate.
Finally, Chapter 6 concludes the thesis and discusses directions for future
research.
8

CHAPTER 2
BACKGROUND
There is a large body of literature on the subject of resource allocation in wire-
less systems that develops rate or power policies in order to optimize a performance
metric. Two important performance metrics in this literature are throughput-
based and delay-based metrics. In this chapter, we summarize important and
relevant works, and briefly describe their assumptions and state their results.
This chapter is not meant to be exhaustive. For a more complete overview, we
refer the readers to the references of this thesis.
2.1 Throughput-Based Objective Functions
In most resource allocation problems, a throughput-based objective function
such as ergodic capacity is maximized subject to some of the power constraints
described in Chapter 1. Ergodic capacity would be a relevant metric for scenarios
with fast fading. If the delay allowed by the application is much longer that
the coherence time of the channel, then the fading is called fast, which is the case
for non-delay-sensitive applications, such as data transmission as opposed to voice
communication. Assumptions on CSI at the receiver and transmitter vary in these
works, but in most of the cases, it is assumed that CSI is available at both the
receiver and transmitter.
9

The authors in [13] consider communications over fading channels in SISO sys-
tems and shows that the optimal power allocation policy in order to maximize the
ergodic capacity subject to long-term power constraints assuming CSI is available
at both the receiver and transmitter is water-filling in time. They prove a channel
coding theorem and a converse that shows that the time-varying channel capacity
is equal to the Shannon capacity of the channel, and the optimal power policy is
P (γ) =
0, γ < γ0′
Pγ0′ −
Pγ, γ ≥ γ0′
, (2.1)
where P is the long-term power constraint, γ the instantaneous SNR, and γ0′ is a
cutoff value satisfying the long-term power constraint with equality. The optimal
power policy in (2.1) is obtained by KKT conditions [6].
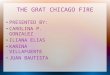
Figure 2.1 illustrates water-filling in time. The Y axis indicates how weak the
channel is, and the arrows indicate the allocated power to corresponding interval.
More power is allocated to stronger channels, and the horizontal line is swept along
the Y axis such that the long-term power constraint is satisfied with equality. As
we can see, we do not allocate power to very weak channels.
In [15], MISO and MIMO systems with Rayleigh flat fading are considered as-
suming that CSI is available at both the receiver and transmitter, and transmitter
is subject to a long-term power constraint. When the transmitter has access to
CSI, it can perform singular value decomposition (SVD) and convert the MIMO
channel to a parallel Gaussian channel. SVD of a MIMO channel is summarized
here.
10
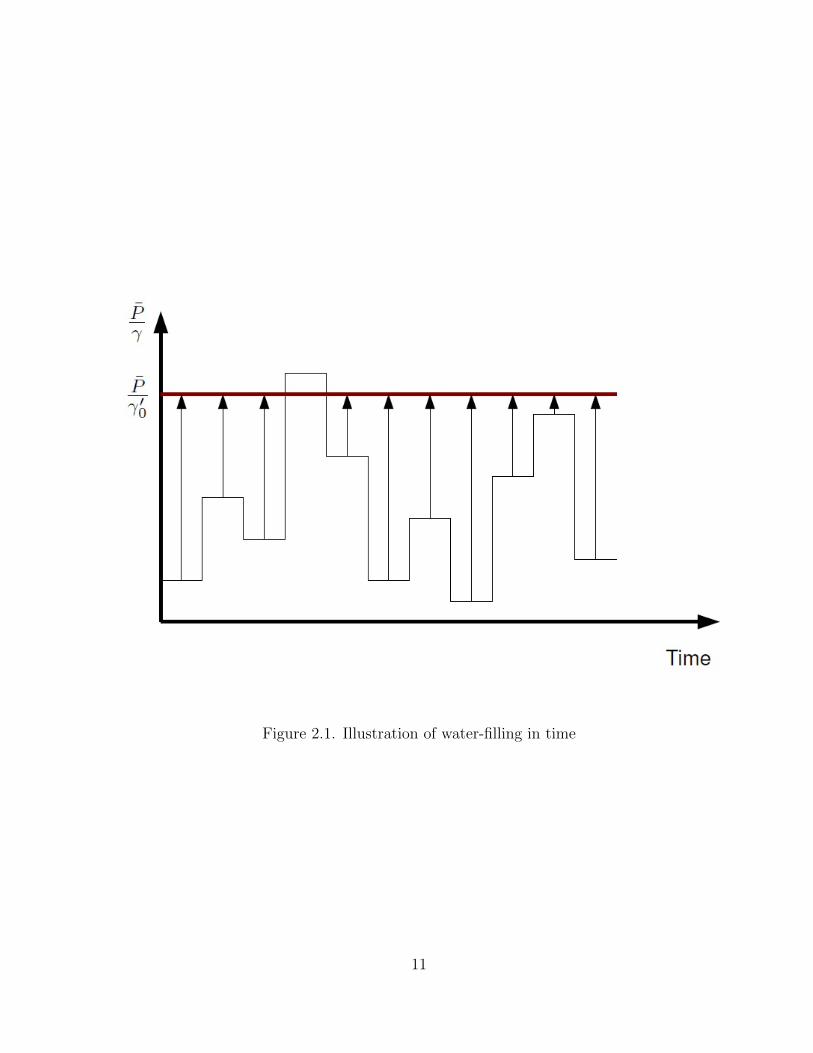
Figure 2.1. Illustration of water-filling in time
11

Consider the baseband-equivalent discrete-time model for a MIMO channel as
y = Hx + n,
where y is a complex vector of NR received signals, and x is a complex vector of NT
transmit signals. H and n are random sequences capturing the effect of multipath
fading and additive noise, respectively, and H at each time is an NR×NT matrix
of complex fading coefficients.
Let n := max (NR, NT ) and m := min (NR, NT ). The fading matrix H can be
represented using SVD as
H = UΛVH , (2.2)
where U and V are unitary matrices and Λ is a diagonal matrix with entries equal
to the square roots of the eigenvalues of the Wishart matrix
W =
HHH , if NR ≤ NT
HHH, if NR > NT
.
Denote the eigenvalues of W by λk, 1 ≤ k ≤ m. The equivalent channel model
is [25]
y = Λx + n, (2.3)
where we use the transformation y = UHy, x = VHx, and n = UHn. The
equivalent channel consists of m parallel channels. Note that the trace of the input
covariance matrix is invariant with respect to this transformation, e.g., tr(Qx) =
tr(Qx).
In the MISO case, the equivalent channel is a SISO system, and optimal power
policy is given by (2.1). In the MIMO case, however, the optimal power policy to
12

maximize the ergodic capacity is shown to be space-time water-filling (also known
as matrix water-filling), which takes the form
Pk =
(1
v′− P
mλ′k
)+
,
where λ′k is the kth normalized singular value of the channel matrix and the con-
stant v′ is determined by substituting the above power policy into
Eλ′[
m∑k=1
Pk(λ′)
]= P ,
which is basically chosen such that the long-term power constraint is satisfied with
equality.
Multiuser scenarios under long-term power constraints are considered in [17]
and [28]. In [17], the optimal power policy to maximize the ergodic sum-of-rates
capacity of a multiple access channel is derived, and it turns out that only one
user can transmit at any particular time instant, and each user allocates power in
time based on the water-filling policy in (2.1). In [28], the whole capacity region
and the corresponding power policies are obtained by extracting the polymatriod
structure of the capacity region.
In some other works, a short-term power constraint is considered. Telatar
in [25] studies the capacity of a MIMO channel subject to a short-term power
constraint for complete CSI, and for CSI at the receiver only. Using singular
value decomposition (SVD), he shows that the optimal power policy is water-
filling across space. Another example of evaluating the capacity subject to only a
short-term power constraint is [12], in which the authors provide an overview of the
results on the Shannon capacity of MIMO channels under different assumptions
on availability of CSI or channel distribution information (CDI).
13

Another power constraint that arises in this thesis is a per-antenna power con-
straint. In [14], per-antenna power constraints are considered in MIMO wireless
systems in the context of beamforming with incomplete CSI. Also, [9] studies op-
timal power allocation subject to `p-norm constrained eigenvalues, which can be
viewed as a suboptimal power allocation policy under short-term and per-antenna
power constraints.
Maximizing the ergodic capacity subject to multiple simultaneous power con-
straints is also considered in some works. The authors in [16] prove a similar
coding theorem to the one in [13] for the Shannon capacity of a SISO fading chan-
nel subject to both long- and short-term power constraints, and state that the
optimal power policy is
P (γ) =
0, γ < γ0
Pγ0− P
γ, γ0 ≤ γ < γ1
Pmax, γ1 ≤ γ
, (2.4)
where P and Pmax are the long- and short-term power constraints, respectively, γ
is the instantaneous SNR, and the thresholds γ0 and γ1 are determined from the
following equations
P
γ0
− P
γ= Pmax, (2.5)
Eγ [P (γ)] = P .
The power policy in (2.4) is obtained by KKT conditions [6]. We call this
power policy modified water-filling across time, where we do not let the power
level exceed the short-term power constraint and the thresholds are obtained such
14

that the long-term power constraint is satisfied with equality.
Figure 2.2 illustrates the modified water-filling in time. The Y axis indicates
how weak the channel is, and the arrows indicate the allocated power to the
corresponding interval. More power is allocated to stronger channels, but we do
not let the power level exceed Pmax, and the horizontal line is swept along the Y
axis such that the long-term power constraint is satisfied with equality. We do
not allocate power to very weak channels under a certain threshold.
Figure 2.2. Illustration of modified water-filling in time
15

As we discuss further in Chapter 3, this policy (2.4) is optimal only in one
regime. The authors in [8] study the same problem for multiple access channels.
We study the optimal power allocation in fast fading MIMO systems subject
to long-term, short-term, and per-antenna power constraints, as continue of the
current literature described above.
Capacity of fast fading Gaussian channel with an energy harvesting sensor
node is studied in [22], with the system model they consider shown in Figure 2.3.
Figure 2.3. The system model in [22]
The ergodic capacity of a fast fading channel subject to energy constraints is
studied. The authors of [22] argue that the ergodic capacity for this model is the
same as the ergodic capacity of a fast fading channel subject to a certain long-term
power constraint, and the optimal power control is water-filling in time.
16

2.2 Delay-Based Objective Functions
Another important performance metric in wireless communications is delay.
It is known that to achieve the ergodic capacity of a fast fading channel one
needs to code across many coherence time of the channel, which requires a large
delay. In fact, fast fading is a relevant metric when the delay requirement of the
application is much larger than the coherence times of the channel. In delay-
sensitive applications, we might focus on a minimal delay communication rather
than on maximal rate communication. With this consideration, we might be
allowed to code across only a single block or across finitely many coherence times
of the channel.
Delay-based objective functions usually arise in network theory if data sources
are considered to be bursty. These aspects have not been fully taken into account
by information theory. The authors in [19] introduce a framework in which some
aspects of both networking and information theory are incorporated. In this work,
delay-optimal scheduling policies for channels with constant latency are obtained
and shown to be threshold strategies, and some properties of optimal policies for
channels with affine latency are derived.
The authors in [4] consider a fading channel between two users and assume
that the data arrives randomly due to a data arrival distribution and stores in a
data buffer until it is transmitted. They study adapting the user’s transmission
rate and power based on CSI and the data buffer occupancy. The system model
in [4] is shown in Figure 2.4.
Two scenarios are considered in [4]. The first scenario, which is based on the
mutual information model, corresponds to fixed-length/variable-rate codewords,
where each codeword is sent in one block of N channel uses, and thus the length
17
Figure 2.4. The system model in [4]
of time to send a codeword is less that the coherence time of the channel, but at
the same time, we need to assume that N is large enough to make the mutual
model acceptable. The second scenario, which is based on Telatar’s model [26],
corresponds to variable-length codewords. In this case, we do not need to assume
that the length of each block, N , is large and indeed we might assume that N = 1
and transmit a codeword over K blocks in such a way that the probability of error
is bounded by η. They develop a model in which the buffer occupancy corresponds
to the reliability required by the data in the buffer plus the remaining reliability
required by the data currently being transmitted [4].
In [4], there are two performance criteria to be traded off: the long-term
average power consumption and the average delay to send the data. Finding the
optimal policy that minimizes a weighted sum of the average power and average
delay becomes an average cost Markov decision problem, and a dynamic program
formulation is developed in [4]. They also quantify the behavior of this tradeoff in
18

the asymptotically large delay regime. Our work in Chapter 5 is based on the first
model (fixed-length variable-rate codewords) introduced in [4], but the energy is
harvested in our model and the objective is to minimize a delay criterion.
The authors in [30] consider an energy harvesting communication system over
a constant link. They assume an ideal situation in which the exact amount of data
and all energy arrivals are known to the transmitter a priori, and they develop an
off-line algorithm to minimize the transmission time of all the data up to a certain
time. The system model in this work is shown in Figure 2.5.
Figure 2.5. The system model in [30]
This model allows for relatively simple and explicit analysis by ignoring the
randomness of data and energy arrivals, and cannot be extended directly to fading
channels.
In Chapter 5, we consider a fading channel in which data and energy arrive
19

randomly, and are stored in data and energy buffers, respectively. We assume
that the the transmitter and receiver have access to causal information about the
channel state, data buffer occupancy, and energy buffer occupancy. Finding the
optimal rate policy to minimize the probability of overflow or average delay of the
data buffer is the aim of this part of our work.
20

CHAPTER 3
LONG-TERM, SHORT-TERM, AND PER-ANTENNA POWER
CONSTRAINTS
In this chapter, we first introduce the channel model and the general formula-
tion of our problem. Then, we study the problem for SISO and MIMO channels.
It is conceptually and notationally appealing to treat SISO and MIMO channels
separately, since in the SISO case the short-term power constraint coincides with
the per-antenna power constraint, because there is only one antenna at the trans-
mitter. On the other hand, the optimization problem is more intricate in the
MIMO case.
3.1 Channel Model and Problem Statement
The baseband-equivalent discrete-time input-output relationship in our MIMO
channel model is
y(i) = H(i)x(i) + n(i), (3.1)
where i is the time index, y(i) is a complex vector of NR received signals, x(i)
is a complex vector of NT transmit signals. H(i) and n(i) are random sequences
capturing the effect of multipath fading and additive noise, respectively. The noise
n(i) is a vector of NR zero-mean, circularly symmetric, complex Gaussian random
21

variables with E[n(i)n(i)H ] = N0INR , and n(i), i = 1, 2, ... is a sequence of inde-
pendent random vectors. The multipath fading H(i) at each time is an NR ×NT
matrix of complex fading coefficients. We assume that the matrix fading process
is stationary and ergodic, and that it varies slowly enough that CSI is available
to the receiver and transmitter. For the case of Rayleigh fading in Chapter 4,
we assume that the entries of H(i) are independent and identically distributed
(i.i.d.) complex Gaussian random variables with mean zero and variance 1/2 per
real dimension.
By considering this channel model and transferring the power constraints in
terms of time averages in Chapter 1 to the ensemble averages, the general optimiza-
tion problem for maximizing the ergodic capacity subject to long-term, short-term,
and per-antenna power constraints is
maxQ(H)
EH
[log det
(1 +
1
N0
HQ(H)HH
)], (3.2a)
subject to EH [tr(Q(H))] ≤ P , (3.2b)
∀H : tr(Q(H)) ≤ Pmax, (3.2c)
∀H : qkk(H) ≤ P , k = 1, 2, ..., NT , (3.2d)
where Q is the input covariance matrix, which needs to be maximized as a function
of the instantaneous channel and qkk is the kth diagonal entry of the matrix Q.
The expectations in (3.2a) and (3.2b) are with respect to the distribution of H.
The power constraints are described in (3.2b), (3.2c), and (3.2d); P represents
the long-term power constraint, Pmax represents the short-term power constraint,
and P represents the per-antenna power constraint. For simplicity, we drop the
time index i. This channel model and the optimization problem simplify to a
22

scalar/vector problem for the SISO/MISO cases considered in the sequel.
3.2 SISO Channels
We first obtain the optimal power allocation in a SISO system subject to both
long- and short-term power constraints. The channel model is the scalar form
of (3.1) with NT = NR = 1.
Let γ := P |h|2N0
denote the instantaneous received SNR without power adapta-
tion, where h is the scalar fading coefficient, and let f(γ) denote the probability
density function (pdf) of γ. Let P (γ) denote the power policy capturing the sec-
ond moment of the input signal as a function of γ. Then the received SNR with
power adaptation is P (γ)γ/P , and the ergodic capacity is [13]
C = Eγ[log
(1 +
P (γ)γ
P
)]. (3.3)
Based upon the coding theorem in [16], the ergodic capacity is the solution to the
following optimization problem:
maxP (γ)
∫log
(1 +
P (γ)γ
P
)f(γ) dγ, (3.4)
subject to Eγ [P (γ)] ≤ P ,
∀γ : P (γ) ≤ Pmax,
which corresponds to a scalar version of (3.2). To determine the general power
policy, let α := Pmax/P be the ratio of the short-term power constraint to the
long-term power constraint, and let αmax be a constant to be specified shortly,
and consider the following three cases:
23

Case 1, α ≤ 1: In this case, the short-term power constraint is always satisfied
with equality and the long-term power constraint can be ignored. Therefore, the
optimal power policy in this case is
P (γ) = Pmax,∀γ. (3.5)
Case 2, αmax ≤ α: In this case, it turns out we can ignore the short-term
power constraint, and the power policy is water-filling in time [13]
P (γ) =
0, γ < γ′0
Pγ′0− P
γ, γ ≥ γ′0
, (3.6)
where the threshold γ′0 is determined from substituting above power allocation
into
Eγ [P (γ)] = P . (3.7)
Case 3, 1 < α ≤ αmax: In this case both long- and short-term power con-
straints play a role, and the power allocation in [16] provides the solution to the
optimization problem as discussed in Chapter 2. By substituting γ1 from (2.5)
and put it into (2.4), the power allocation in this case becomes
P (γ) =
0, γ < γ0
Pγ0− P
γ, γ0 ≤ γ < γ0
1−αγ0
Pmax,γ0
1−αγ0≤ γ
, (3.8)
where the threshold γ0 is determined by substituting the above power allocation
into (3.7). This solution comes from the KKT conditions [6]. We call this power
24

policy modified water-filling across time, where we do not let the power level
to exceed the short-term power constraint and the threshold is obtained such
that the long-term power constraint is satisfied with equality. As we mentioned
previously, [16] determines a similar solution, which is valid only in this case
(Case 3), since the threshold γ0 in (3.8) has a valid solution only in this regime.
In Chapter 4, for the Rayleigh fading channel, we show that the threshold γ0 is
uniquely determined from (3.7) if 1 < α ≤ αmax (Case 3).
Note that the thresholds γ0 in (3.8) and γ′0 in (3.6) are, in general, different.
In order to eliminate the short-term power constraint, the power policy in (3.6)
should always satisfy the short-term power constraint P (γ) ≤ Pmax, ∀γ, but the
maximum value of P (γ) in (3.6) occurs as γ →∞ and is equal to P /γ′0. Therefore,
P
γ′0≤ Pmax ⇒ 1
γ′0≤ α ⇒ αmax =
1
γ′0. (3.9)
In general, the values of γ′0 and αmax depend on the distribution of γ and the
average SNR of the system. In Chapter 4, we find these values for a Rayleigh
fading channel analytically and numerically. It is worth mentioning that the value
of αmax is important in practical wireless communication systems, since it might
be the case that the allowed α is larger than αmax. In that case, we can simply
ignore the short-term power constraint, and the optimal power allocation policy
is water-filling in time.
We have discussed the power policies in Cases 2 and 3 in Chapter 2, which are
water-filling in time and modified water-filling in time, and the are illustrated in
Figures 2.1 and 2.2, respectively.
From e-CFR [1, Title 47, Part 27], we find the following rule: “In measuring
transmission in the 1710-1755 MHz and 2110-2155 MHz bands using an average
25

power technique, the peak-to-average ratio (PAR) of the transmission may not
exceed 13 dB.”In fact, as we will see from the numerical results in Section 4.2,
the value of αmax is less than 13 dB for all the channel models we consider at
an average SNR higher than -10 dB. Therefore, a system designer can simply
ignore the short-term power constraint in those regimes and use water-filing in
time as the power policy without violating the above rule. In other words, this
FCC constraint is quite liberal.
If there are multiple antennas at the transmitter and a single antenna at the
receiver, i.e., MISO, the problem of maximizing the ergodic capacity subject to
both long- and short-term power constraints is the same as the one in the SISO
case, since we can convert the MISO channel to an equivalent SISO channel. We
consider two different conversions for MISO systems: singular value decomposi-
tion (SVD),which is optimal, and antenna selection at the transmitter, which is
suboptimal. In Chapter 4, we derive the optimal power allocation policy for each
case and obtain the thresholds for the optimization problems in Rayleigh fading.
3.3 MIMO Channels
In this section we assume that there are multiple antennas at the transmitter
and the receiver. The channel model and problem statement are described in
Section 3.1. Consider the SVD method described in Chapter 2.
Let Λ′ :=√
PmN0
Λ be the normalized channel with diagonal entries equal to
square root of λ′k = PmN0
λk, 1 ≤ k ≤ m. In the SVD equivalent channel model, the
power allocation policy is a function of Λ′. Therefore, the covariance matrix can
be given as Q(Λ′) or Q(λ′), where λ′ := [λ′1, λ′2, ..., λ
′m]. To maximize the capacity,
the covariance matrix should be diagonal [25]. Let Pk(λ′), 1 ≤ k ≤ m denote the
26

kth diagonal entry of the covariance matrix. Note that each Pk is a function of
the vector λ′, or in other words, a function of all λ′l’s, 1 ≤ k, l ≤ m.
In the following three subsections, we obtain the power allocation that max-
imizes the ergodic capacity subject to various combinations of the three power
constraints described earlier. Optimal power allocations are obtained in Sec-
tion 3.3.1, but suboptimal solutions are obtained in Sections 3.3.2 and 3.3.3 due to
more stringent constraints. While not necessary in principle, these more stringent
constraints are more amendable to analysis.
3.3.1 Long-Term and Short-Term Power Constraints
If the input power is subject to long- and short-term power constraints, we
remove the constraint in (3.2d). Then, using the SVD equivalent channel model
and the above definitions, the optimization problem in (3.2) becomes
maxPk(λ′),k=1,2,...,m
C = Eλ′[
m∑k=1
log
(1 +
Pk(λ′)λ′k
P /m
)], (3.10)
subject to Eλ′[
m∑k=1
Pk(λ′)
]≤ P ,
∀λ′ :m∑k=1
Pk(λ′) ≤ Pmax.
The optimal power allocation structure can be found by examining the KKT
conditions. Formally, we state and prove the following theorem.
27

Theorem 1. The solution to the optimization problem (3.10) for P ≤ Pmax is
Pk(λ′) =
(
1v− P
mλ′k
)+
, if∑m
k=1
(1v− P
mλ′k
)+
≤Pmax(1
β+v− P
mλ′k
)+
, otherwise
, (3.11)
where (x)+ := max (0, x). The Lagrange multipliers v and β are obtaining by
solvingm∑k=1
(1
β + v− P
mλ′k
)+
= Pmax, (3.12)
Eλ′[
m∑k=1
Pk(λ′)
]= P . (3.13)
Proof. Since (3.10) is a convex optimization problem, We prove the theorem using
the KKT conditions [6]. For simplicity, we drop λ′ from Pk(λ′) and simply denote
it by Pk in the proof of Theorems 1, 2 and 3. To maximize the capacity, the
long-term power constraint should be satisfied with equality, which is possible
since α ≥ 1. Let θ1, θ2, ..., θm denote the Lagrange multipliers corresponding to
the constraints that force the powers to be positive (P1 ≥ 0, P2 ≥ 0, ..., Pm ≥ 0,
respectively), θ′ be the Lagrange multiplier corresponding to the short-term power
constraint, and v be the Lagrange multiplier corresponding to the long-term power
constraint (we consider the long-term power constraint with equality). Then, the
KKT conditions can be written as
28

θkPk = 0, k = 1, 2, ...,m, (3.14a)
θk ≥ 0, k = 1, 2, ...,m, (3.14b)
Pk ≥ 0, k = 1, 2, ...,m, (3.14c)
θ′(m∑k=1
Pk − Pmax) = 0, (3.14d)
θ′ ≥ 0, (3.14e)
m∑k=1
Pk ≤ Pmax, (3.14f)
− mf(λ′)
mPk + Pλ′k
− θk + θ′ + vf(λ′) = 0, k = 1, 2, ...,m, (3.14g)
Eλ′[
m∑k=1
Pk
]= P . (3.14h)
Now, based on the above conditions, we obtain some restrictions on the solu-
tion:
Restriction 1: if Pk 6= 0, then from (3.14a), θk = 0, so θ′ = ( 1Pk+P /(mλ′k)
−
v)f(λ′) ≥ 0 (from (3.14g) and (3.14e)).
Restriction 2: if Pmλ′k≥ 1
v, then Pk = 0 (from Restriction 1).
Now, consider two different situations:
Situation 1,∑m
k=1
(1v− P
mλ′k
)+
≤ Pmax: In this case, the power allocation
Pk =(
1v− P
mλ′k
)+
, 1 ≤ k ≤ m is a valid solution and satisfies all the KKT
conditions (note that in this case θ′ = 0, and from Restriction 1 and 2, above
power allocation results).
Situation 2,∑m
k=1
(1v− P
mλ′k
)+
> Pmax: In this case, θ′ 6= 0 and from (3.14d),
we have∑m
k=1 Pk − Pmax = 0. Now, consider two cases:
29

2.1: If Pmλ′k≥ 1
θ′/f(λ′)+v, then Pk = 0 (because if Pk > 0, then from (3.14a)
θk = 0, and from (3.14g) Pk = 1θ′/f(λ′)+v
− Pmλ′k
> 0, which is a contradiction).
2.2: If Pmλ′k
< 1θ′/f(λ′)+v
, then θk = 0 (because if θk > 0, then from (3.14a)
Pk = 0, and from (3.14g) θk = θ′+vf(λ′)− f(λ′)P /(mλ′k)
> 0, so Pmλ′k
> 1θ′/f(λ′)+v
, which
is a contradiction).
With the explanation in 2.1 and 2.2 cases, and defining β := θ′/f(λ′), we now
can determine the power allocation in situation 2. That is Pk =(
1β+v− P
mλ′k
)+
, 1 ≤
k ≤ m, where β is the answer to the equation∑m
k=1
(1
β+v− P
mλ′k
)+
= Pmax.
The power allocation described in Situation 1 and Situation 2 completes the
proof.
In the power allocation above, v is a constant that is fixed for all fading coeffi-
cients. We refer to v as “global constant”, since it is fixed for all values of λ′. We
refer to β as the “local constant”, since it depends on the current channel fading
coefficients λ′. From the power allocation (3.11), note that the local constant β is
required only if∑m
k=1
(1v− P
mλ′k
)+
> Pmax.
Despite the intricate structure of power allocation, the complex joint pdf of
the random vector λ′, and the multiple integral for computing the expectation,
finding the threshold v is practical even if computationally involved. In fact, the
threshold v of the system needs to be computed only once, and it can be obtained
off-line through numerical methods. Once v is available, the local threshold β can
be determined from (3.12) for each fading realization.
Note that the optimal power allocation in (3.11) is in fact a two level water-
filling across time and space. In the first level, we perform the usual water-
filling across time and space if the allocated power satisfy the short-term power
30

constraint. Otherwise, we penalize the power by adding the local constant β in
the denominator in (3.11) such that the short-term power constraint is satisfied
with equality. The illustration of the optimal power policy for a 2 × 2 MIMO
system in Figure 3.1 gives some useful insight about the structure of the power
allocation.
Figure 3.1. Illustration of the optimal power allocation for a 2× 2MIMO system
31

In Figure 3.1, the X axis indicates the time. For every time slot the value
of Pmλ′k
for k = 1, 2 for the two singular values of the channel is sketched. In
fact, the Y axis indicates how weak is the channel, and the arrows indicate the
allocated power to the corresponding channels. More power is allocated to stronger
channels, but we do not allow the sum of the allocated power corresponding to the
two singular values of the channel exceed the short-term power constraint Pmax at
each time slot. As it can be seen, at time slots 1, 2, 4, 5, and 7, the power policy
is water-filling across time and space. However, for time slots 3 and 6, we change
the threshold such that the sum of the power corresponding to the two singular
values of the channel is equal to the short-term power constraint. Note that the
constant β depends on the channel fading coefficients, and the global threshold v
is chosen such that the long-term power constraint is satisfied with equality.
In Section 3.2, finding the optimal power allocation was separated into three
cases depending on the value of α and a constant αmax. An analogous situation
arises for MIMO systems, as we now briefly discuss.
Case 1, α ≤ 1: In this case, the short-term power constraint is satisfied with
equality, and the long-term power constraint can be removed. The optimal power
allocation is the well-known water-filling across antennas, but not across time, as
obtained in [25].
Case 2, αmax ≤ α: In this case, the power allocation in Theorem 1 is valid,
but it simplifies to water-filling in time and space
Pk =
(1
v′− P
mλ′k
)+
, (3.15)
where the constant v′ is determined by substituting the above power policy into (3.13).
In fact, we can eliminate the short-term power constraint, and the problem re-
32

duces to finding the optimal power allocation for MIMO channels subject to only
a long-term power constraint, which has been examined in [15].
Case 3, 1 < α ≤ αmax: Both power constraints paly a role, and the optimal
power allocation is given by Theorem 1, which was discussed earlier.
The only remaining task is to obtain the value of αmax. Note that for this case,
we must ensure that the power allocation in (3.15) does not violate the short-term
power constraint. Therefore, we have
m∑k=1
(1
v′− P
mλ′k
)+
≤ Pmax,∀λ′ ⇒m∑k=1
1
v′≤ Pmax
⇒ m
v′P≤ Pmax
P.
Therefore, we have
αmax =m
v′P. (3.16)
3.3.2 Long-Term and Per-Antenna Power Constraints
If the input power is subject to long-term and per-antenna power constraints,
we remove the constraint in (3.2c). First, note that for a Hermitian matrix Q we
have [18]
max1≤k≤NT
qkk ≤ max1≤k≤NT
eigenvaluek(Q), (3.17)
where qkk is the kth diagonal entry of the matrix Q, and eigenvaluek(Q) is the
kth eigenvalue of the matrix Q. If we consider the SVD method discussed earlier,
then under the transformation x = VHx, the eigenvalues of the input covariance
matrix do not change. On the other hand, the eigenvalues of the matrix Qx are
33

equal to the diagonal entries Pk(λ′), 1 ≤ k ≤ m. Therefore, the constraint
Pk(λ′) ≤ P , k = 1, ...,m, (3.18)
is sufficient to satisfy (3.2d). Because of inequality (3.17), this condition is only
sufficient and not necessary. Therefore, we can find a suboptimal solution by
assuming a more stringent constraint. Specifically, we consider the optimization
problem
maxPk(λ′),k=1,2,...,m
C = Eλ′[
m∑k=1
log
(1 +
Pk(λ′)λ′k
P /m
)], (3.19)
subject to Eλ′[
m∑k=1
Pk(λ′)
]≤ P ,
∀λ′ : Pk(λ′) ≤ P , k = 1, ...,m.
Theorem 2. The solution to the optimization problem (3.19) for P ≤ mP is
Pk(λ′) =
0, if P
mλ′k≥ 1
v
1v− P
mλ′k, if 1
v> P
mλ′k≥ 1
v− P
P , otherwise
. (3.20)
Proof. Let θ1, θ2, ..., θm denote the Lagrange multipliers corresponding to the con-
straints that force the powers to be positive (P1 ≥ 0, P2 ≥ 0, ..., Pm ≥ 0, respec-
tively), θ′1, θ′2, ..., θ
′m be the Lagrange multipliers corresponding to the per-antenna
power constraints (P1 ≤ P , P2 ≤ P , ..., Pm ≤ P , respectively), and v be the La-
grange multiplier corresponding to the long-term power constraint (we consider
34

the long-term power constraint with equality). Then, the KKT conditions can be
written as [6]:
θkPk = 0, k = 1, 2, ...,m,
θk ≥ 0, k = 1, 2, ...,m,
Pk ≥ 0, k = 1, 2, ...,m,
θ′k(Pk − P ) = 0,
θ′k ≥ 0,
Pk ≤ P ,
− f(λ′)
Pk + Pmλ′k
− θk + θ′k + vf(λ′) = 0, k = 1, 2, ...,m,
Eλ′[
m∑k=1
Pk
]= P .
Then, with the same procedure as in the proof of Theorem 1, we can see that
the power policy in (3.20) results from above conditions.
Note that in the power allocation above, v is a constant that is fixed for all
fading coefficients, and is determined by substituting the power allocation (3.20)
into (3.13). Let α := mP/P . Note that the definition of α is slightly different
from Sections 3.2 and 3.3.1, since there are m per-antenna power constraints here.
Again, the general power allocation can be determined by considering three cases.
Case 1, α ≤ 1: In this case, the long-term power constraint can be removed
and the power policy is given by Pk(λ′) = P .
Case 2, αmax ≤ α: In this case, the per-antenna power constraint can be
removed. The power allocation in Theorem 2 is valid and simplifies to (3.15),
35

where v′ is determined from (3.13). By the same procedure as before, we can find
that αmax = m/(v′P ).
Case 3, 1 < α ≤ αmax: In this case, both power constraints play a role and
the power policy is given by (3.20).
3.3.3 Long-Term, Short-Term, and Per-Antenna Power Constraints
If the input power is subject to long-term, short-term, and per-antenna power
constraints, we obtain a suboptimal power allocation. The corresponding opti-
mization problem is given in (3.2). In order to make this optimization prob-
lem mathematically tractable, we will combine the two power constraints (3.2c)
and (3.2d) into a more stringer power constraint. Using [9, Lemma 1] and in-
equality (3.17), the following lemma applies.
Lemma 1. If Pmaxm≤ P ≤ Pmax, and the following p-norm power constraint is
satisfied
∀λ′ :
(m∑k=1
(Pk(λ′))
p
) 1p
≤ P , (3.21)
where p = ln (m)/ ln (mP/Pmax), then the two power constraints (3.2c) and (3.2d)
would be satisfied.
Proof. The proof follows from inequality (3.17), the described SVD method and
its properties, and [9, Lemma 1].
Note that the p-norm power constraint (3.21) is sufficient, not necessary.
Therefore, the power allocation in the sequel is suboptimal. Considering Lemma
1, the optimization problem in (3.2) can be stated as following.
36

maxPk(λ′),k=1,2,...,m
C = Eλ′[
m∑k=1
log
(1 +
Pk(λ′)λ′k
P /m
)], (3.22)
subject to Eλ′[
m∑k=1
Pk(λ′)
]≤ P ,
∀λ′ :
(m∑k=1
(Pk(λ′))
p
) 1p
≤ P .
Theorem 3. The solution to the optimization problem (3.22) for P ≤ mp−1p P , is
the optimal power allocation policy as
Pk(λ′) =
0, if Pmλ′k≥ 1
v
1v− P
mλ′k, if 1
v< P
mλ′kand
(∑mk=1
((1v′− P
mλ′k
)+)p) 1
p
≤ P
sol, otherwise
(3.23)
where sol in above equation is the solution of −v+(Pk(λ′)+ P
mλ′k)−1 = (Pk(λ
′))p−1
β,
and β is a constant depending on the fading coefficients and is chosen such that
the inequality (3.21) is satisfied with equality for the corresponding fading coeffi-
cient. The constant v like before, is a global constant, which is chosen such that
the long-term power constraint is satisfied with equality, i.e., is determined from
substituting the power allocation (3.23) into (3.13).
Proof. The proof is based on the KKT conditions, and is very similar to the proof
of Theorem 1. In fact, the KKT conditions are the same as in proof of Theorem 1,
but instead of the condition in (3.14d), (3.14f), and (3.14g), we have the following
37

conditions
θ′
((m∑k=1
P pk )
1p − P )
)= 0,
(m∑k=1
P pk )
1p ≤ P ,
− f(λ′)
Pk + Pmλ′k
− θk + θ′(pP p−1k P 1−p)+
vf(λ′) = 0, ∀1 ≤ k ≤ m.
Then, applying the same procedure as in proof of Theorem 1, the power policy
in (3.23) results.
As before, we are interested in finding the conditions for which one (or more)
of the power constrains can be eliminated without being violated. We have more
options than before, because there are three power constraints. First, consider the
short-term and per-antenna power constraints. Clearly, if P ≥ Pmax, then the per-
antenna power constraint can be removed and the optimal power policy is given
by (3.11), because we need to consider long- and short-term power constraints
only. On the other hand, if Pmaxm≥ P , then the short-term power constraint can
be removed and the suboptimal power policy is given by (3.20), because we can
consider long-term and per-antenna power constraints only.
However, if Pmaxm≤ P ≤ Pmax, according to Lemma 1, we can combine the
short-term and per-antenna power constraints to one p-norm power constraint as
in (3.21). Before considering the conditions for which we can eliminate one of the
long-term and p-norm power constraints, we state and prove the following lemma,
and then we will divide the problem into three cases.
38

Lemma 2. Let p ≥ 1 and x = [x1, ..., xm]T ∈ Rm. Then
m∑k=1
xk ≤ mp−1p
(m∑k=1
xpk
) 1p
= mp−1p ‖x‖p. (3.24)
Proof. According to Holder’s inequality, if x, y ∈ Rm and p, q ≥ 1 such that
1p
+ 1q
= 1, then
< x, y >=m∑k=1
xkyk ≤ ‖x‖p‖y‖q.
If we let y = [1, 1, ..., 1]T , then the inequality (3.24) follows.
Now, let α := mp−1p P /P and consider the following three cases.
Case 1, α ≤ 1: In this case, the p-norm power constraint is satisfied with
equality, and the long-term power constraint can be eliminated, because
m∑k=1
Pk(λ′) ≤ m
p−1p
(m∑k=1
(Pk(λ′))
p
) 1p
(3.25)
≤ mp−1p P (3.26)
≤ P , (3.27)
where (3.25) holds according to Lemma 2, (3.26) holds because of the p-norm
power constraint, and (3.27) holds because α ≤ 1. Therefore, the average of the
left term of (3.25) is always less than P . Thus, the long-term power constraint is
satisfied and can be removed in this case and the problem reduces to maximizing
the ergodic capacity subject to the p-norm power constraint only. This problem
has been considered in [9] and the optimal power policy for the p-norm power
39

constraint is given by
Pk(λ′) =
0, if λ′k = 0
solution of (Pk(λ′))
p+ 1
λ′k(Pk(λ
′))p−1
= β′, otherwise
, (3.28)
where the constant β′ is chosen such that the p-norm power constraint is satisfied
with equality.
Case 2, αmax ≤ α: In this case, we can eliminate the p-norm power constraint
(and therefore, short-term and per-antenna power constraints) and maximizing
the ergodic capacity is subject to the long-term power constraint only. The power
allocation in Theorem 3 is valid and simplifies to (3.15), where v′ is determined
from (3.13).
Case 3, 1 < α ≤ αmax: In this case, both power constraints play a role and
the power policy is given by (3.23).
For obtaining the value of αmax, we find the conditions for which the power
policy (3.15) does not violate the p-norm power constraint. The worst case occurs
as λ′k →∞, k = 1, ...,m. Then we should have
(m∑k=1
(1
v′
)p) 1p
≤ P ⇒ m
v′P≤ m
p−1p P
P= α,
which means that αmax = m/(v′P ) like before.
3.4 Summary
In this chapter, we derived the optimal power allocation in a fading environ-
ment to maximize the ergodic capacity if the input power is subject to long- and
40

short-term power constraints for SISO and MIMO systems. Furthermore, we de-
termined a suboptimal power allocation if the input power is subject to long-term
and per-antenna power constraints and if the input power is subject to long-term,
short-term, and per-antenna power constraints in MIMO systems. We studied
the conditions for which one or more of the power constraints can essentially be
eliminated. In addition, we figured out that the ratio of power constraints plays
an important role in determining the optimal/suboptimal power allocation.
In particular, when the input power is subject to long- and short-term power
constraints, the structure of the optimal power policy depends on the ratio of the
short-term power constraint to the long-term power constraint. If this ratio is
smaller than 1, then the long-term power constraint can be ignored. If it is larger
than a threshold (αmax), then the short-term power constraint can be ignored.
However, if this ratio is between 1 and αmax, then both power constraints play a
role and the optimal power policy is given by a more complicated structure which
results from the KKT conditions.
Similar results was shown if the input power is subject to long-term and per-
antenna power constraints and if the input power is subject to long-term, short-
term, and per-antenna power constraints. For the latter case, we first combined
the short-term and per-antenna power constraints to a `p-norm power constraint,
and found the optimal power allocation subject to the long-term and `p-norm
power constraints.
41

CHAPTER 4
SPECIALIZING TO RAYLEIGH FADING
In Chapter 3, we obtained the optimal power allocation policies for general
channel models subject to various combinations of power constraints. In this sec-
tion, we consider the iid Rayleigh fading channel model, and simplify the described
power policies to the extent possible, and provide some numerical results.
4.1 Analysis
We are interested in studying the optimal power policy for Rayleigh fading
channel model more precisely, because this model is usually assumed in practical
systems. In particular, we obtain some of the constants and thresholds introduced
in the power policies before. In fact, most of these constants are a function of the
distribution of the fading coefficients. We will simplify the calculations needed to
obtain the constants for the Rayleigh fading case. However, it is not always easy
to find a closed form for the thresholds. We will simplify the equations for all
the thresholds in the SISO and MISO Rayleigh fading case and for some of the
thresholds in the MIMO Rayleigh fading case.
4.1.1 SISO and MISO
Consider the parameter γ defined in Section 3.2. For Rayleigh fading γ is an
exponential random variable with expected value P /N0. Let γ be the average SNR
42

of the system, which in the case of SISO and MISO systems is γ = P /N0. We
denote the probability density function of γ by f(γ), which for the SISO Rayleigh
fading channel model is
f(γ) =
e− γγ
γ, γ ≥ 0
0, otherwise
. (4.1)
Beginning with the SISO with distribution (4.1), we derive the thresholds γ′0,
αmax, and γ0 in the optimal power allocation from Section 3.2. In [2], the value
of γ′0 is derived for Rayleigh fading channel as the solution to the equation
e−γ′0γ
γ′0γ
− E1
(γ′0γ
)= γ, (4.2)
where En(x) is the exponential integral defined by
En(x) :=
∫ +∞
1
t−ne−xt, dt, x ≥ 0. (4.3)
From [2], we know that (4.2) has a unique solution and γ′0 always lies in the interval
[0, 1]. From (3.9), αmax = 1/γ′0 is unique and is always larger than one. According
to (4.2), note that the value of αmax is only a function of γ. For the threshold γ0,
we have the following theorem.
Theorem 4. If 1 < α ≤ αmax (Case 3), then the threshold γ0 in (3.8) for the
Rayleigh fading SISO channel can be determined from
e−x
x− e−
x1−αxγ
x− E1(x) + E1
(x
1− αxγ
)+ αγe−
x1−αxγ = γ, (4.4)
43

where x := γ0/γ, and E1(.) is the exponential integral defined in (4.3). Further-
more, γ0 is unique and γ0 ∈ [0, 1α
].
Proof. If we put the power allocation (3.8) into (3.7), we have
∫ γ01−αγ0
γ0
(P
γ0
− P
γ
)f(γ) dγ +
∫ ∞γ0
1−αγ0
Pmaxf(γ) dγ = P .
Putting the distribution f(γ) from (4.1) into the above equation, (4.4) results.
Note that in the power allocation (3.8), the inequality γ0 ≤ γ0
1−αγ0should always
be satisfied for the power allocation to be valid. Therefore, the threshold γ0 should
lie in the region [0, 1/α] (0 ≤ γ0 ≤ 1/α, therefore, 0 ≤ x ≤ 1/γα). Now, define
the function g(x) as
g(x) :=e−x
x− e−
x1−αxγ
x− E1(x) + E1
(x
1− αxγ
)+ αγe−
x1−αxγ − γ.
Then, we have:
∂g(x)
∂x=e−
x1−αxγ − e−x
x2≤ 0,∀x ∈ [0,
1
γα], (4.5)
limx→0+
g(x) = (α− 1)γ > 0 (since 1 < α), (4.6)
limx→( 1
γα)−g(x) =
e−x1
x1
− E1(x1)− γ, x1 =1
γα. (4.7)
Note that 1 < α ≤ αmax for the power allocation (3.8), and from (3.9) αmax =
1γ′0
, where γ′0 is given by (4.2). Therefore, x1 = 1γα≥ γ′0
γ, and from [2], we have
44

e−x1
x1− E1(x1)− γ ≤ 0 for x1 = 1
γα. Therefore,
limx→( 1
γα)−g(x) ≤ 0. (4.8)
From (4.5), (4.6), and (4.8), we observe that γ0 is uniquely determined and
γ0 ∈ [0, 1α
] and the proof is complete.
Now, consider a MISO system with NT = n antennas at the transmitter and
NR = 1 antenna at the receiver. The discrete-time input-output relationship is
a special case of (3.1), where the output and noise are scalars. We consider two
different transmission schemes, one based upon optimal beamforming and referred
to as the SVD method, and another based upon antenna selection.
Since the rank of channel matrix H is one, after singular value decomposition,
we can see that the channel in (3.1) is equivalent to the following scalar channel
y =√λ1x+ n, (4.9)
where λ1 =∑n
i=1 |hi|2. The instantaneous received SNR without power adaptation
in this context is
γ =λ1P
N0
. (4.10)
Therefore, we observe that the MISO problem reduces to the SISO problem with
a different distribution. For Rayleigh fading, γ in (4.10) is a n-Erlang random
variable with the distribution function
f(γ) =
1
(n−1)!γ
(γγ
)n−1
exp(−γγ
), γ ≥ 0
0, otherwise
, (4.11)
45

where γ = P /N0 as before. The optimal power policy is as in Section 3.2 with
three regions as before (Case 1, Case 2, and Case 3) corresponding to the power
allocation policy in (3.5), (3.6), and (3.8), respectively. However, the value
of αmax, γ′0, and γ0 are different, since they depend on the distribution of γ.
According to [2] and [15], with the distribution in (4.11), the value of γ′0 is given
by
Γ(n,
γ′0γ
)γ′0γ
− Γ
(n− 1,
γ′0γ
)= (n− 1)!γ, (4.12)
where Γ(., .) is the complementary incomplete gamma function
Γ(a, x) :=
∫ ∞x
exp (−t)ta−1 dt.
As proved in [2], the above equation has a unique solution and γ′0 ∈ [0, 1]. There-
fore, αmax is uniquely determined by (3.9), i.e., αmax = 1/γ′0. As we can see
in (4.12), the value of αmax for a fixed n is only a function of γ.
The value of γ0 in Case 3, i.e., 1 < α ≤ αmax, is a constant that determines the
power allocation in (3.8), and is given by (3.7). Similarly, we have the following
theorem.
Theorem 5. If 1 < α ≤ αmax (Case 3), then the threshold γ0 in (3.8) for the
MISO Rayleigh fading channel using the SVD method can be determined from
Γ(n− 1,x
1− αxγ)− Γ(n− 1, x) +
1
xΓ(n, x)+
(γα− 1
x)Γ(n,
x
1− αxγ) = γ(n− 1)!, (4.13)
where x := γ0/γ. Furthermore, γ0 is unique and γ0 ∈ [0, 1α
].
Proof. The steps of the proof are exactly like those in the proof of Theorem 4
46

with the pdf (4.11) for γ.
For MISO with antenna selection, by choosing the transmitter antenna corre-
sponding to the largest channel gain, we have another scalar channel with
γ =P |h|2
N0
, (4.14)
where |h|2 = max (|h1|2, |h2|2, ..., |hn|2). Therefore, the pdf of γ is given by
f(γ) =
nγ
exp(−γγ
)(1− exp
(−γγ
))n−1
, γ ≥ 0,
0, otherwise
, (4.15)
where γ = P /N0 as before. Again, the optimal power policy is as in Section 3.2.
According to [2] and [15], with the distribution in (4.15), the value of γ′0 is given
by the following equation
n−1∑k=0
(−1)k(n− 1
k
)(e−(k+1)γ′0/γ
(k + 1)γ′0/γ− E1((k + 1)γ′0/γ)
)=γ
n. (4.16)
As proved in [2], the above equation has a unique solution and γ′0 ∈ [0, 1]. There-
fore, αmax is uniquely determined by (3.9). As for the constant γ0, which specifies
the power allocation in Case 3 (3.8), we have the following theorem.
Theorem 6. If 1 < α ≤ αmax (Case 3), then the threshold γ0 in (3.8) for the
MISO Rayleigh fading using the antenna selection method can be determined from
n−1∑k=0
(−1)K(n− 1
k
)(e−(k+1)x
(k + 1)x− E1((k + 1)x) (4.17)
+ E1
((k + 1)x
1− αxγ
)+
1
k + 1(αγ − 1
x)e−
(k+1)x1−αxγ
)=γ
n,
47

where x := γ0/γ. Furthermore, γ0 is unique and γ0 ∈ [0, 1α
].
Proof. The steps of the proof are exactly like those in the proof of Theorem 4
with the pdf (4.15) for γ.
4.1.2 MIMO
In the MIMO case, because of more intricate structure of the power policies,
finding a simplified equation for expressing some of the thresholds is not easy. In
particular, when the power allocation contains a local constant, which depends
on the instantaneous fading coefficients (like β in Sections 3.3.1 and 3.3.3), there
is not a closed form for this constant, and therefore, other thresholds in that
power policy that depend on this local constant cannot be expressed through
more simplified equations. Furthermore, the complex joint pdf of the random
vector λ′ and the multiple integral for computing the expectations in the MIMO
channel model, make it less convenient to find the thresholds analytically, and
numerical computation is more appropriate in this case.
First, we find αmax (the threshold that determines Case 2) in the Rayleigh
fading channel model. In all the Sections 3.3.1, 3.3.2, and 3.3.3, we have αmax =
m/(v′P ), where v′ is the constant in the optimal power policy (3.15). Therefore,
for a fixed m and P , αmax is the same in Sections 3.3.1, 3.3.2, and 3.3.3. If we
define γ0 := v′P /m, then αmax = 1/γ0. From (3.13), γ0 becomes the threshold as
in [15, Eq. (36)] ∫ ∞γ0
(1
γ0
− 1
x
)fλ′(x) dx = 1, (4.18)
where fλ′(x) is the probability distribution function of a normalized unordered
eigenvalue of the Wishart matrix [25]. More simplified equations for determining
γ0 and the proof of its uniqueness can be found in [15]. Once γ0 is found, αmax =
48
1/γ0 can be determined.
Finally, consider the threshold v in (3.20) in Section 3.3.2. Because this power
policy does not contain any local constant, it is possible to obtain equations for v
and prove its uniqueness. However, we do not go through the lengthy calculations,
because the procedure is very similar to the one in [15], in which the authors
have analyzed the case in which the input power is subject to a long-term power
constraint only.
4.2 Numerical Results and Discussion
As with the analysis in Section 4.1, all the numerical results in this section are
for Rayleigh fading channels. For the ease of presentation, we split this section
into two subsections.
4.2.1 SISO and MISO
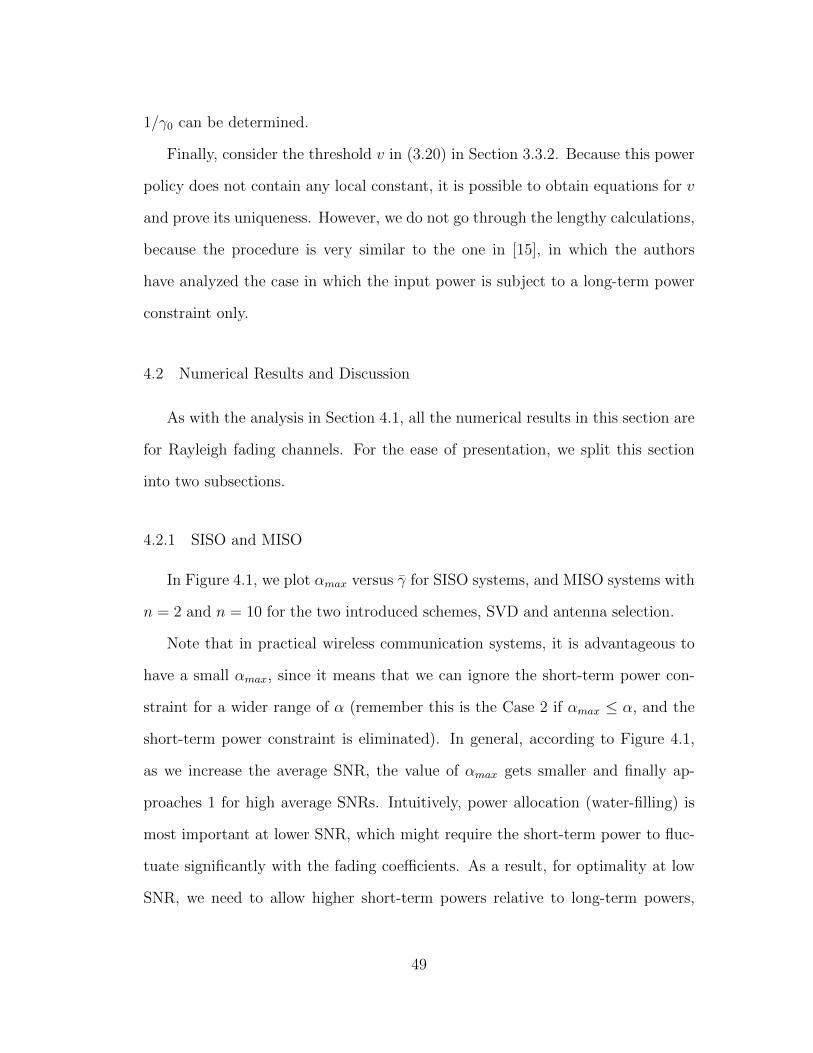
In Figure 4.1, we plot αmax versus γ for SISO systems, and MISO systems with
n = 2 and n = 10 for the two introduced schemes, SVD and antenna selection.
Note that in practical wireless communication systems, it is advantageous to
have a small αmax, since it means that we can ignore the short-term power con-
straint for a wider range of α (remember this is the Case 2 if αmax ≤ α, and the
short-term power constraint is eliminated). In general, according to Figure 4.1,
as we increase the average SNR, the value of αmax gets smaller and finally ap-
proaches 1 for high average SNRs. Intuitively, power allocation (water-filling) is
most important at lower SNR, which might require the short-term power to fluc-
tuate significantly with the fading coefficients. As a result, for optimality at low
SNR, we need to allow higher short-term powers relative to long-term powers,
49

Figure 4.1. The value of αmax, the threshold separating Cases 2 and 3,versus average SNR γ for SISO and MISO systems with Rayleigh fading
50

and correspondingly αmax is larger at low SNR. That is, the short-term power
constraint is somehow more relevant at low SNR compared to high SNR. Also,
note that in the MISO systems, the value of αmax is always smaller than in the
SISO system. As we can see in Figure 4.1, the more antennas at the transmitter,
the smaller αmax. In addition to the above observations, we can see that the value
of αmax in the optimal SVD scheme is less than that of the suboptimal antenna
selection scheme for a fixed number of antennas at the transmitter.
In Figure 4.2, we plot the capacity for the two schemes in the MISO systems
with different values of n, but with a fixed Pmax and N0. For comparison, we
have also plotted the capacity for the case, in which there is channel state infor-
mation at the receiver only (labeled “Without CSIT”) [25]. The capacity is given
by (3.3) and the power allocation policies described earlier, and depends on the
value of average SNR, and indirectly on α and αmax that determine which one of
the three cases in Section 3.2 occurs. As an example, for the optimal SVD scheme
with n = 2, the three regions γ ∈ [−10 dB, 12.79 dB], γ ∈ [12.79 dB, 13.01 dB],
and γ ∈ [13.01 dB, 20 dB] correspond to Case 2, Case 3, and Case 1, respec-
tively. As another example, for the suboptimal antenna selection scheme with
n = 2, the three regions γ ∈ [−10 dB, 12.71 dB], γ ∈ [12.71 dB, 13.01 dB], and
γ ∈ [13.01 dB, 20 dB] correspond to Case 2, Case 3, and Case 1, respectively. In
the third region (Case 1), we observe saturation of the ergodic capacity because
of the short-term power constraint. In that region, the horizontal axes shows the
value of available average SNR, not the actual one. As we can see, there is al-
ways a small range in which Case 3 occurs, and this range becomes smaller if we
increase the number of transmit antennas n.
Note that as the number of antennas at the transmitter increases, the capacity
51

Figure 4.2. Ergodic capacity versus average SNR for MISO systems withRayleigh fading, Pmax = 20(13dB) and N0 = 1, and n = 2, 10.
52

per channel use also increases for the case of complete CSI. However, there is not
that much of improvement in the capacity by increasing the number of antennas
if there is no CSIT. It is known that the capacity in MIMO systems increases
linearly by m := min (NT , NR) [12], which for MISO channels, it is equal to 1
because NR = 1. However, when CSI is also available at the transmitter, the
capacity increases logarithmically as the number of antennas at the transmitter
increases [29].
Next, we examine the effect of α on the capacity. Figure 4.3 shows the capacity
versus average SNR for each of the two schemes in the MISO channel with the
two extreme possibilities for α: α =∞ so that αmax ≤ α, ∀γ, and α = 1,∀γ. For
other values of 1 < α <∞ between the two extremes, the capacity versus average
SNR curve lies between the two curves for α = 1 and α =∞. Note that because
α is fixed and P is varying, Pmax is varying unlike previous plot.
As we can see from Figure 4.3, the difference between the capacities for the
two extreme values of α is small, and becomes smaller for large γ for both SVD
and antenna selection. In fact, if α =∞, the problem reduces to the case in which
there is no short-term power constraint (it is also the case when αmax ≤ α, ∀γ),
and if α = 1, the problem reduces to constant power allocation since the power
policy is P (γ) = P . Note that even in this case of constant power allocation,
we use the CSIT because we perform singular value decomposition or antenna
selection. If we do not use the CSIT, there would be a large gape between the
capacities as we observed in Figure 4.2.
We observe that the value of the short-term power constraint (Pmax) does not
significantly impact the ergodic capacity of the channel for large average SNRs,
as long as it is larger than the long-term power constraint, i.e., α ≥ 1. In other
53
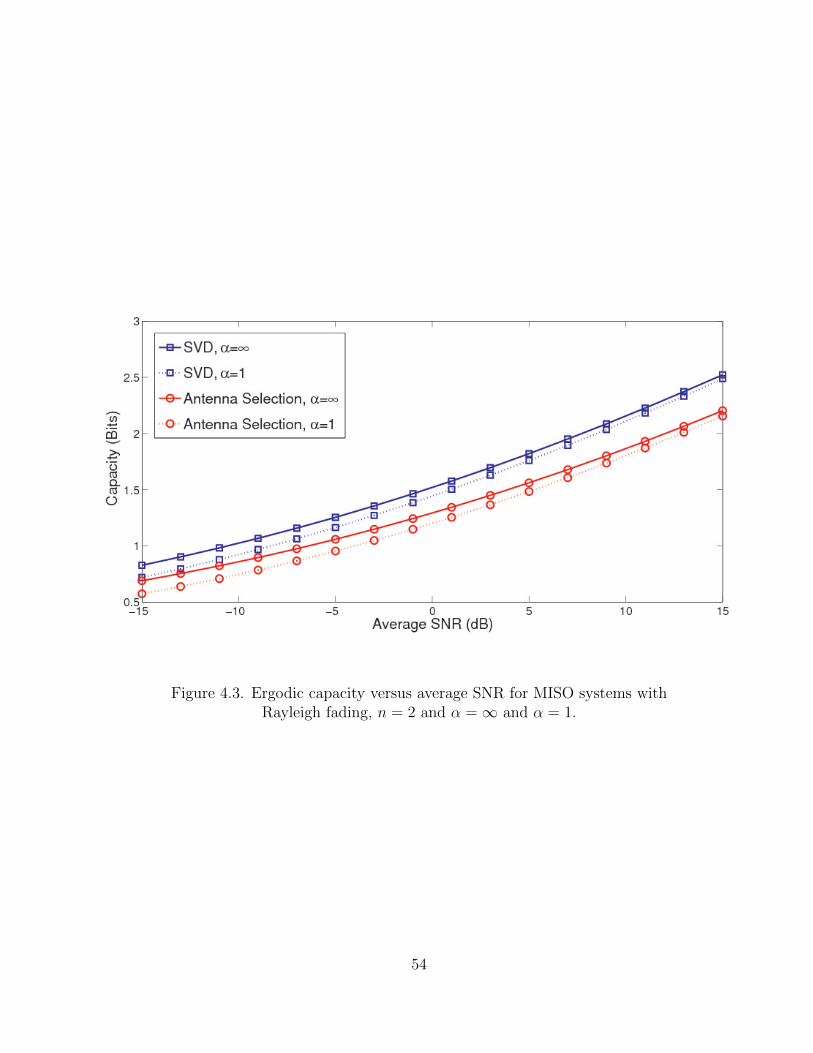
Figure 4.3. Ergodic capacity versus average SNR for MISO systems withRayleigh fading, n = 2 and α =∞ and α = 1.
54

words, if P ≤ Pmax, the difference between the capacity obtained from the optimal
power allocation policy subject to the long-term power constraint only and the one
obtained from the optimal power allocation subject to both long- and short-term
power constraints is relatively small (about 3 dB at low SNR and 1 dB at higher
SNR for the MISO systems with n = 2).
4.2.2 MIMO
we present some numerical results for MIMO systems with Rayleigh fading.
Figure 4.4 shows the value of αmax versus the average SNR per parallel channel
(λ = PmN0
) for 2 × 2 and 4 × 4 MIMO systems. This plot suggests similar ob-
servations as for MISO systems: for large average SNRs, αmax approaches unity,
and as the number of antennas increases, the value of αmax decreases, which is
desirable in practice. Intuitively, water-filling has more short-term fluctuations at
low SNR, which makes αmax larger. In fact, the short-term power constraint is
more relevant at low SNR compared to high SNR.
Figure 4.5 examines the effect of Pmax on the capacity of MIMO systems with
Rayleigh fading. We compare the capacity of two extreme cases: Pmax = P and
Pmax → ∞ (or α = 1 and α → ∞ with α defined in Section 3.3.1). The figure
shows the capacity versus average SNR for these two cases in a 2×2 MIMO system
along with the case of having CSI only at the receiver but not at the transmitter.
Note that this figure also examines the effect of P on the capacity if we consider
two extreme cases: P = P /m and P →∞ (or α = 1 and α→∞ with α defined
in Section 3.3.2). For other values of 1 < α < ∞ between the two extremes, the
capacity versus average SNR curve lies between the first two curves in Figure 4.5.
As we can see, the difference between the first two curves appears negligible.
55

Figure 4.4. The value of αmax, the threshold separating Cases 2 and 3,versus Average SNR per parallel channel ( P
mN0) for MIMO systems with
Rayleigh fading.
56

Figure 4.5. Ergodic capacity versus average SNR per parallel channel( PmN0
) for 2× 2 MIMO systems with Rayleigh fading.
57
The same result is reported in [24], in which the curves for the two cases of space-
time water-filling and spatial water-filling are equivalent to the case with α =∞
and α = 1 in the figure, respectively. To interpret this, note that at each fixed
average SNR, the small difference between the first two curves in Figure 4.5 is
the difference between the ergodic capacities with a same average SNR, but with
two extreme possibilities when Pmax is equal to P and when the short-term power
constraint is removed (Pmax =∞). The ergodic capacity of the channel with the
same average SNR but with a short-term power constraint P < Pmax < ∞ has
a value between the two extreme cases. Therefore, for a fixed average SNR, the
value of the short-term power constraint has a very small effect on the ergodic
capacity as long as it is equal to or larger than the long-term power constraint.
Note that in the case of MISO systems in Figure 4.3, the Pmax has a considerable
effect on the ergodic capacity for low SNR regimes. However, for MIMO systems,
this effect is negligible for all plotted range of SNRs, since the performance of
the spatial water-filling (it happens when Pmax = P ) is very close to the one of
the space-time water-filling (it happens when we remove the short-term power
constraint or α =∞).
According to the above discussion, one might argue that if we use a constant
power allocation across the time, i.e., replacing the two long- and short-term
power constraints in (3.10) with a more stringent power constraint∑m
k=1 Pk ≤
P when P ≤ Pmax (or 1 ≤ α), then we would have almost the same ergodic
capacity as in the optimal power allocation in (3.11). This reasoning is in fact
true, but surprisingly, the complexity of computing the constant power allocation
across time is often more than that of the optimal one. In the optimal power
allocation (3.11), except for the threshold v, which needs to be pre-computed
58
offline, we need to compute the threshold β online only for some of the channel
realizations (when∑m
k=1
(1v− P
mλ′k
)+
> Pmax). However, in the constant power
allocation across the time, we need to compute a threshold online (the threshold
for the spatial water-filling) for each channel realization.
When there is no CSI at the transmitter, the capacity for a 2 × 2 Rayleigh
fading MIMO system is plotted in Figure 4.5 and is labeled as “Without CSIT”.
As we can see, we have approximately 3 dB gain if we have full CSI comparing
to the case of having CSI only at the receiver in the low SNR regime. However,
for high SNRs, the ergodic capacity is the same for the two cases. This always
happens for a m × m i.i.d. Rayleigh fading MIMO system as discussed in [29],
since at high SNR, the water-filling strategy allocates an equal amount of power
to all the spatial modes, as well as an equal amount of power over time, and that is
what the transmitter does when it does not have CSI [29]. This reasoning remains
true for a general m× n i.i.d. Rayleigh fading MIMO system with m ≤ n, which
is not the case in a MISO system.
We stress that the results and observations in this section are only applicable
to iid Rayleigh fading. By contrast, the effect of Pmax on the ergodic capacity
is considerable if the model is Rayleigh fading with log-normal shadowing. We
anticipate such a result based upon our observations in conjunction with results
in [24], in which the authors demonstrate that with log-normal shadowing, space-
time water-filling achieves significantly higher ergodic capacity than spatial water-
filling at low to moderate SNR regimes.
59

4.3 Summary
In this chapter, we specialized the problem of Chapter 3 to Rayleigh fading
model. We focused on the first scenario, which the input power is subject to long-
and short-term power constraints. we obtained some of the constants and thresh-
olds introduced in the power policies before. In fact, most of these constants are
a function of the distribution of the fading coefficients. We simplified the calcu-
lations needed to obtain the constants for SISO, MISO, and MIMO systems with
Rayleigh fading. In addition, numerical results suggested that for the Rayleigh
fading case, a short-term power constraint that is larger than a long-term power
constraint does not significantly impact the ergodic capacity of the channel.
We obtained simplified equations for the thresholds introduced in the power
allocation in the SISO and MISO systems with Rayleigh fading in Case 2 (αmax ≤
α) and Case 3 (1 < α ≤ αmax), which their general structures were discussed
in Chapter 3. In addition, we found the value of αmax, the threshold separating
Cases 2 and 3 in the power allocation structure for SISO, MISO with optimal
beamforming, MISO with antenna selection, and MIMO systems with Rayleigh
fading. Furthermore, we sketched this value versus average SNR for SISO, MISO,
and MIMO systems. From the numerical results, we concluded that water-filling
has more short-term fluctuations at low SNR, which makes αmax larger. In fact,
the short-term power constraint is more relevant at low SNR compared to high
SNR.
Finally, we sketched the ergodic capacity versus average SNR for MISO and
MIMO systems with Rayleigh fading for two extreme cases α = ∞ and α = 1,
and figured out that the difference for these two cases is very small, especially in
the high SNR regime, which suggests that a short-term power constraint that is
60
larger than a long-term power constraint has a small effect on the ergodic capacity
of the channel.
61

CHAPTER 5
HARD POWER CONSTRAINTS IN ENERGY HARVESTING SYSTEMS
In this chapter, after introducing the model and mathematically stating the
problem, we analyze the asymptotic behavior of the optimal rate policy and ob-
jective function and state and prove our main results. Then, we extend the work
to multiple access channels.
5.1 Model and Problem Statement
The system model is shown in Figure 5.1. The data arrives from a higher layer
application and waits in the data buffer until transmission. Harvested energy
becomes available in the energy buffer.
We assume a block-fading channel model in which the fading coefficient stays
fixed over each block ofN consecutive channel uses. The complex fading coefficient
during the mth block is denoted by Hm. The baseband equivalent discrete-time
input-output relationship in this channel model is
Ym = XmHm + Zm, (5.1)
where Xm, Ym, and Zm are complex vectors in CN denoting the channel inputs,
the channel outputs, and the additive noise which is complex circularly symmetric
62

Figure 5.1. System Model
Gaussian random vector independent of the fading coefficients with zero mean and
covariance matrix σ2I, respectively.
The number of bits arriving in the data buffer at time m is a random variable
denoted by Am with average A. The state of the data buffer, i.e., the number of
bits in the data buffer, at time m is indicated by Sm. Let the random variable Em
denote the amount of energy arriving into the energy buffer at time m, and the
random variable Eremm denote the state of the energy buffer at time m, i.e., the
amount of energy remaining in the energy buffer. We assume that each of the ran-
dom sequences {Hm}∞m=1, {Am}∞m=1, and {Em}∞m=1 are independent and identically
distributed (iid) and independent of each other, i.e., memoryless assumption.
Let µm denote the number of bits the transmitter decides to send at time m
based on all the available information at the transmitter. Let P (Hm, µm) be the
63

required transmission power during a block when the fading coefficient is Hm and
the transmitter chooses to reliably transmit µm bits. We assume that CSI and
the current state of the data and energy buffers are known to the transmitter and
receiver (since the receiver should find the rate policy based on this information).
Assuming that N is large and based on the mutual information model in [4],
µm/N = log
(1 +|Hm|2P (Hm, µm)
σ2
), (5.2)
and therefore,
P (Hm, µm) =σ2
|Hm|2(2µm/N − 1
). (5.3)
The state of the data buffer would update as
Sm+1 = Sm + Am+1 − µm, (5.4)
and the state of the energy buffer would update as
Eremm+1 = Eremm + Em+1 −σ2
|Hm|2(2µm/N − 1
). (5.5)
Note that each unit of time equals to a block of data of N consecutive channel
uses, and energy arrives at the beginning of each time interval. Therefore, energy
and power are equivalent in this formulation. Furthermore, note that (5.4) is valid
only if the the length of the data buffer is infinite. When it is finite and equal to
L, the state of the data buffer would update as
Sm+1 = min {Sm + Am+1 − µm, L}. (5.6)
64

We impose two constraints on the rate policy µm. The number of bits that the
transmitter decides to send cannot be more than the number of bits in the data
buffer at each time, i.e.,
µm ≤ Sm. (5.7)
Additionally, the amount of energy used to send data at each time cannot be
more than the amount of the energy in the energy buffer (energy constraints).
This enforces the constraint
µm ≤ N log
(1 +|Hm|2Eremm
σ2
). (5.8)
We state our objective function as an average data buffer cost as in [3]. Let
b(Sm) be the cost of the data buffer when there are Sm bits in the buffer. The
function we aim to minimize over all rate policies is
lim supk→∞
1
k
k∑m=1
E [b(Sm)] . (5.9)
We deal with two possible cost functions in this chapter. If we consider the
cost function
b(Sm) =
1 if Sm = L,
0 otherwise,
(5.10)
then with the data buffer update as in (5.6), the objective function defined in (5.9)
would be the probability that the length of the buffer is equal to L, i.e., the
probability of overflow. If we use the following cost function instead
b(Sm) =Sm
A, (5.11)
65

then by Little’s law, the objective function in (5.9) would be the expected time
average delay in the data buffer. Note that the average total delay experienced
by the data is the sum of the delay in the data buffer plus the time from when
each block of data leaves the data buffer until it is decoded. Since the later delay
is constant in our coding model, we only focus on the average delay in the buffer.
In general, minimizing (5.9) subject to (5.7) and (5.8) is a dynamic program-
ming problem. Using the techniques in [5], some properties of the optimal policies
can be shown. Under the memoryless assumption mentioned before, it can be
shown ([3], [5], and [10]) that under some additional constraints on the state
spaces, there exists an optimal stationary policy that is independent of time and
depends only on the current fading coefficient and the states of the data and
energy buffers. We denote this rate policy by µ(S,Erem,H) which indicates the
number of bits transmitted in the state (S,Erem,H). Additionally, under this rate
policy the sequence {(Sm,Am,Eremm ,Em,Hm)} forms a Markov chain.
We will assume that under every given stationary policy µ this Markov chain is
ergodic with a steady state distribution πµ(S,A,Erem,E,H) which represents the asymp-
totic distribution of (Sm,Am,Eremm ,Em,Hm) under policy µ [3]. Now by rewriting
the objective function (5.9) and the constraints (5.7) and (5.8), we can write the
optimization problem as
minµ(S,Erem,H)
E [b(S)] , (5.12)
subject to µ(S,Erem,H) ≤ S,
µ(S,Erem,H) ≤ N log
(1 +|H|2Erem
σ2
),
where the data buffer state is updated as (5.4) or (5.6), and the energy buffer
66
state is updated as (5.5). Denote the value of the objective function under policy
µ by pµof (L) if the length of the data buffer is finite and is equal to L and the
cost function (5.10) is used, and by Dµ if the length of the data buffer is infinite
and the cost function (5.11) is used. In other words, pµof (L) is the probability of
overflow under policy µ when the length of data buffer is L, and Dµ is the average
delay in the buffer under policy µ when the length of data buffer is infinite.
5.2 Main Results
Finding the optimal policies or their properties for problem (5.12) is a dynamic
programming problem, which can be handled with the techniques in [5]. In this
section, we focus on finding the regions in which the minimized objective function
is well-behaved asymptotically. In fact, we find a threshold for the average rate of
data arrivals and establish converse and achievability theorems when A is larger or
smaller than this threshold, respectively. To introduce this threshold, we consider
a new problem with ignoring the data buffer and assuming that the data is always
available at the transmitter. We aim to maximize the average rate of transmitted
data subject to the energy constraints. The threshold is µmax which is the solution
to the following optimization problem
minµ(Erem,H)
E [µ(Erem,H)] = µmax, (5.13)
subject to µ(Erem,H) ≤ N log
(1 +|H|2Erem
σ2
),
where the energy buffer state is updated as (5.5). Note that since we have ignored
the data buffer in (5.13), the rate policy is only a function of energy buffer state
and the current fading coefficient under the stationarity property discussed before.
67

Note that problem (5.13) is again a dynamic programming problem. This problem
is partially studied in [20], where some suboptimal power policies are derived. Now
we relate the solutions of problems (5.12) and (5.13) in Theorem 7 and Theorem 8
for minimum probability of overflow and minimum average delay, respectively. Let
Amax be the maximum value that the data arrival rate can take. In Theorem 7
and 8, let µmax be the optimal solution to (5.13).
Theorem 7. Assume that the length of the data buffer is finite and is equal to L
and the cost function (5.10) is used. If A > µmax, then pµof (L) ≥ A−µmaxAmax
under any
stationary policy µ that satisfies the constraints. On the other hand, if A < µmax,
then there exists a sequence of simple policies µL such that pµLof (L) = o( 1LK
) for
any K ≥ 2.
We call the first part of the theorem the converse part, and the second part
the achievability part.
Proof. Proof of the converse part: We define Fm := Am−µm and Gn :=∑n−1
m=1[Sm+
Am+1 − µm − L]+, where [x]+ := max (x, 0). Then, we have
Sn =n∑
m=1
Fm −Gn. (5.14)
By taking the expectation of the two sides of (5.14), dividing by n, and letting n
go to infinity, we have
limn→∞
1
nE [Sn] = lim
n→∞
1
n
n∑m=1
E [Fm]− limn→∞
1
nE [Gn] . (5.15)
Since the length of the data buffer is bounded, the left hand side of (5.15) equals to
zero. Because we have assumed that the Markov chain {(Sm,Am,Eremm ,Em,Hm)}
68

is ergodic under any stationary policy µ, and from (5.15) and definitions of Fm
and Gn, we have
E [A− µ] = E[[Sm + Am+1 − µm − L]+
]. (5.16)
Finally, we have
A− µmax ≤ (5.17a)
E [A− µ] = E[[Sm + Am+1 − µm − L]+
]≤ (5.17b)
AmaxE [b(S)] = Amaxpµof (L),
where (5.17a) comes from the fact that µmax ≥ E [µ] for any policy µ that satisfies
the energy constraints according to (5.13), and (5.17b) comes from the fact that
when the buffer overflows, Gn increases by at most Amax bits. Therefore, we can
conclude that pµof (L) ≥ A−µmaxAmax
.
Proof of the achievability part: We use the same simple policy as in [3]. That
is, we partition the data buffer state space into two disjoint sets [L/2, L] and
[0, L/2). Then we define the simple policy with drift vL as
µ(S,Erem,H) =
ψ1(Erem,H) if S ∈ [L/2, L],
ψ2(Erem,H) if S ∈ [0, L/2),
(5.18)
where E [ψ1(Erem,H)] = A+vL and E [ψ2(Erem,H)] = A−vL. The only difference
between this argument and the one in [3] is that we should make sure that these
policies are feasible with respect to the energy constraints. Note that we have
assumed that A < µmax. If we let vL =KVar[ψA(Erem,H)] lnL
L, where ψA(Erem,H) is
69
a policy with mean A, then limL→∞ vL = 0, and A + vL ≤ µmax as L→∞.
Therefore, both policies ψ1(Erem,H) and ψ2(Erem,H) are feasible, since a policy
with an average rate less than or equal to µmax is feasible according to (5.13), and
the asymptotic result proved in [3, Perposition 6.2.7] is also true here. That is
limL→∞ LKpµLof (L) = 0, i.e., pµLof (L) = o( 1
LK) for any K ≥ 2. Note that in our
problem we should use the results of Markov modulated random walks instead of
the properties of random walks discussed in [11].
The intuition behind the structure of the simple policy introduced for the
achievability part is that we do not want the data buffer to get too full or too
empty. On the one hand, the probability of overflow increases if the data buffer
is too full. On the other hand, we cannot take advantage of a good channel
coefficient or large amount of harvested energy to transmit enough data, if the
data buffer is too empty. Therefore, we increase the average rate of transmitted
data if the state of the data buffer is in the upper part, and decrease it if the state
of the data buffer is in the lower part.
Note that by choosing a large K, we can achieve the very fast convergence of
the probability of overflow to zero. However, as is discussed in [3], the problem
would be that the larger K is, the larger L will needed to be before the asymptotic
convergence rate is meaningful.
Theorem 8. Assume that the length of the data buffer is infinite and the cost
function (5.11) is used. If A > µmax, then the average delay Dµ is infinite under
any stationary policy µ that satisfies the constraints. On the other hand, if A <
µmax, then for every 0 ≤ v ≤ µmax− A there exists a simple policies µv defined as
70

µv(S,Erem,H) =
ψ1(Erem,H) if S ∈ [1/v,∞],
ψ2(Erem,H) if S ∈ [0, 1/v),
(5.19)
where E [ψ1(Erem,H)] = A+ v and E [ψ2(Erem,H)] = A− v, such that the average
delay can be upper bounded as
Dµv ≤ 1
vA+
exp (2vr∗(v))
r∗(v)A, (5.20)
where r∗(v) is the positive root of semi-invariant moment generating function [11]
of A− ψ1(Erem,H), i.e., the positive root of equation
E[exp
(r∗(v)(A− ψ1(Erem,H))
)]= 1. (5.21)
Proof. The proof of the first part (converse part): Let Fm := Am − µm, then we
have
Sn =n∑
m=1
Fm,
since overflow does not occur in this case. Therefore,
limn→∞
1
nE[Sn
A
]=
1
Alimn→∞
1
n
n∑m=1
E [Am − µm] .
Note that from the ergodicity property, we have
Dµ =
limn→∞
n(A− E [µ]) ≥ (5.22)
limn→∞
n(A− µmax) =∞, (5.23)
71

where (5.22) is because µmax is by definition the maximum value of the average
transmitted data under the hard power constraints, and (5.23) is because A >
µmax by assumption.
The proof of the second part (achievability part): Note that in the simple
policy (5.19), both policies ψ1(Erem,H) and ψ2(Erem,H) are feasible, since accord-
ing to (5.13) any policy with average rate less than µmax is feasible. Then, the
upper bound in (5.20) results from [3, Lemma 6.3.3] which uses some techniques
from [11] and [27].
Note that the achievability part of Theorem 8 introduces a set of upper bounds
for the average delay over which we can optimize.
5.3 Multiple Access: Separate and Cooperative Users
Similar to [3], we extend the results to multiple access channels with two users.
All the assumptions about the channel is the same as in the single user case. The
channel fading coefficients are indicated by Hm = (H1m,H
2m) at time m. Now,
we make some similar definitions as before. µm
:= (µ1m, µ
2m) is the rate policy,
Am := (A1m,A
2m) is a random vector indicates the number of bits arrive in the
data buffers with mean (A1, A2), and Sm := (S1m,S
2m) is the state of the data
buffers. When each of these come with an index m, it means at time m.
In this section, we assume that the data buffers have finite length L1 and L2
and let L := (L1, L2). The same assumptions and reasonings as in Section 5.1
about the stationarity of the rate policy and ergodicity of the Markov chain are
also valid here. We are interested in minimizing the average of a weighted function
of the probability of overflows, i.e., E [β1b(S1) + β1b(S1)], where b(Si), i = 1, 2 is
72

defined in a similar way as (5.10) with substituting L with Li, i = 1, 2 for the
first and second users, respectively. We have the same data buffer constraints as
in (5.7) for each user. Similar to (5.6), the update of the data buffers’ states can
be written in vector form as
Sm+1 = min {Sm + Am+1 − µm, L}. (5.24)
For convenience, we use the notation C(x) := log (1 + x/σ2). Let P 1 and
P 2 be the power (energy) that the first and the second users require to reliably
transmit µ1 and µ2 bits with fading coefficients H. We say that P := (P 1, P 2) is
in the feasible power region and show it by P ∈ P F (µ,H) when they satisfy the
constraints
|H1|2P 1 ≥ C−1
(µ1
N
), (5.25a)
|H2|2P 2 ≥ C−1
(µ2
N
), (5.25b)
|H1|2P 1 + |H2|2P 2 ≥ C−1
(µ1 + µ2
N
). (5.25c)
Figure 5.2 shows an example of this feasible region. We consider two situations,
when the energy buffers of the two users are separate, and when the energy is
harvested in a single battery (energy buffer). We call the former separate users
and the latter cooperative users.
5.3.1 Separate Users
We assume that there is a separate energy buffer for each user. E := (E1,E2) is
the amount of energy arrives in the energy buffers, and Erem := (Erem,1,Erem,2) is
73
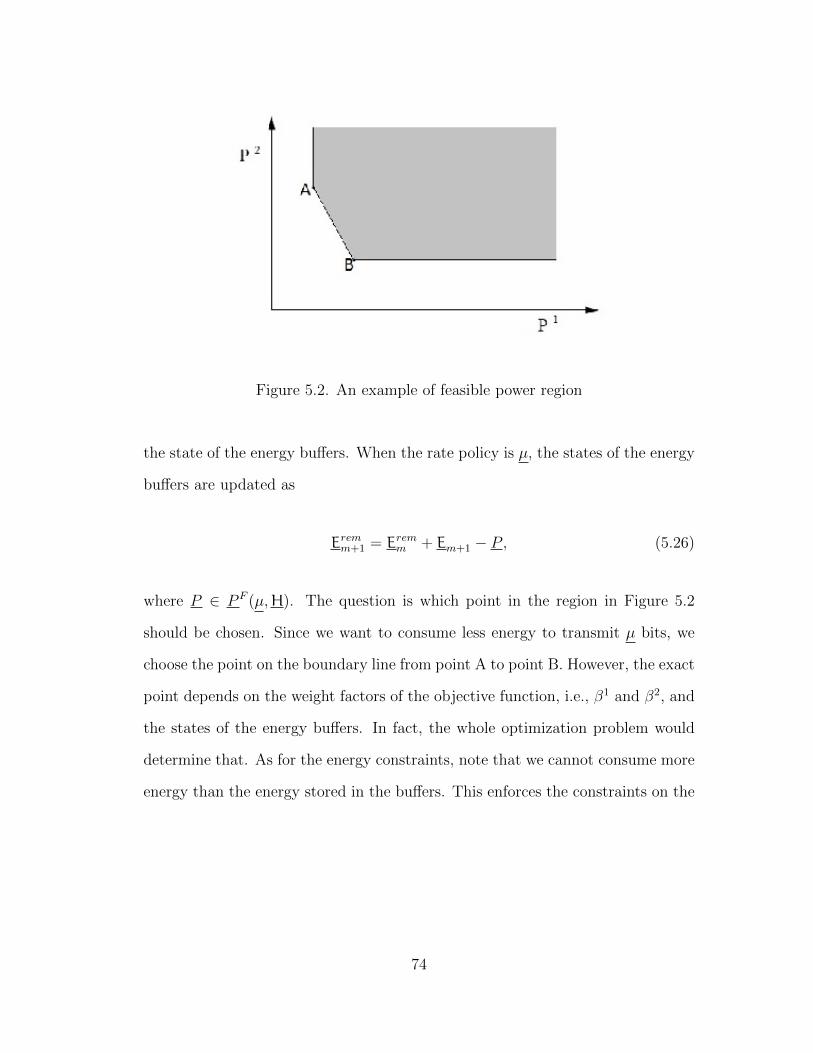
Figure 5.2. An example of feasible power region
the state of the energy buffers. When the rate policy is µ, the states of the energy
buffers are updated as
Eremm+1 = Eremm + Em+1 − P , (5.26)
where P ∈ P F (µ,H). The question is which point in the region in Figure 5.2
should be chosen. Since we want to consume less energy to transmit µ bits, we
choose the point on the boundary line from point A to point B. However, the exact
point depends on the weight factors of the objective function, i.e., β1 and β2, and
the states of the energy buffers. In fact, the whole optimization problem would
determine that. As for the energy constraints, note that we cannot consume more
energy than the energy stored in the buffers. This enforces the constraints on the
74

rate policy as
µ1 ≤ NC(|H1|2Erem,1), (5.27a)
µ2 ≤ NC(|H2|2Erem,2), (5.27b)
µ1 + µ2 ≤ NC(|H1|2Erem,1 + |H2|2Erem,2). (5.27c)
The problem is to minimize the objective function E [β1b(S1) + β1b(S1)] over all
policies µ under the described constraint.
As in Section 5.2, we are interested in finding the region for (A1, A2) such that
the minimized objective function is well-behaved asymptotically. To that end,
we consider the problem of transmitting as much data as possible subject to the
energy constraints when there are no data buffers and the data is always available
at each user. We say that the policy µ is allowable and show it by µ ∈ µA(Erem,H)
if it satisfies the energy constraints (5.27). Then, we define the average allowable
rate region as
µA :={E[µ(Erem,H)
]: µ(Erem,H) ∈ µA(Erem,H)
}, (5.28)
where the state of the energy buffers is updated as (5.26). In the following theorem
we assume that L1 = L and L2 = αL, where α is a finite constant. Let Aimax, i =
1, 2 be the maximum amount of data arrivals.
Theorem 9. If (A1, A2) /∈ µA, then for any stationary policy µ that satisfies
all the constraints, the probability of overflow is lower bounded by pµi
of ≥ (Ai −
E [µi])/Aimax, i = 1, 2, and at least for one of i = 1, 2 the right-hand side of this
inequality is greater than zero if the ranges of data arrivals are finite. On the
other hand, if (A1, A2) ∈ µA and it is not on the boundary region, then there
75

exists a sequence of simple policies µL
such that the probability of overflow has the
asymptotic behavior pµiLof = o( 1
LK), i = 1, 2 for any K ≥ 2.
The proof of this theorem uses the same techniques as in [3] and is similar to
the proof of previous two theorems.
5.3.2 Cooperative Users
In this section, we assume that the energy of both users is harvested in the
same energy buffer. This assumption is practical when the energy buffers of the
two users are allowed to cooperate. Let E := E1 + E2 be the amount of energy
arrives in the energy buffer, and Erem be the state of the energy buffer.
Since we consume the energy from the same energy buffer, only P 2 + P 2 is
important in the feasible power region. In other words, we want to minimize
P 1 + P 2 over all (P 1, P 2) ∈ P F (µ,H). Let P (µ,H) denote the solution to this
minimization problem. It can be easily shown that to minimize the sum power
P 1 +P 2, (P 1, P 2) should be the point A or B in figure 5.2 depending on which of
H1 or H2 is larger. The energy buffer state is updated as
Eremm+1 = Eremm + Em+1 − P (µ,H). (5.29)
The energy constraints are
µ1 ≤ NC(|H1|2Erem), (5.30a)
µ2 ≤ NC(|H2|2Erem), (5.30b)
µ1 + µ2 ≤ NC((|H1|2 + |H2|2)Erem), (5.30c)
and the objective function is the same as in Section 5.3.1. Again by ignoring
76
the data buffers and focusing on the energy constraints in the same way as in
Section 5.3.1, the allowable policies and average allowable rate region is defined
for cooperative users. Obviously, average allowable rate region for cooperative
users contains the one for separate users. How much they are different is out of
the scope of this Thesis. To best of our knowledge, this problem has not been
studied before and can be interesting. What is important here is that the same
theorem as Theorem 9 with the average allowable rate region for cooperative users
(µAcooperative
) is also valid here. We do not repeat stating the theorem.
Finally, note that for the multiple access channel, there is not a certain thresh-
old. Instead, we obtained an average allowable rate region and stated the theorem
with assumptions about the average arrival rates (A1, A2) belonging or not be-
longing to this region.
5.4 Summary
We mathematically formulated a wireless system in which data and energy
arrive randomly due to a data and energy random process and are stored in
the data and energy buffers. The objective is to spend the harvested energy
to transmit the stored data in such a way that a delay criterion, e.g., average
delay in the data buffer or probability of overflow, is minimized subject to the
hard power constraints imposed by the available energy. We characterized the
asymptotically optimal rate policies for such a system model, and proved some
converse and achievability theorems for both point-to-point channels and multiple
access channels with two users.
In particular, we showed that if the average rate of data arrival is larger than a
certain threshold, then the probability of overflow is lower bounded by a constant,
77

and the average delay is infinite if there is no constraint on the data buffer length.
On the other hand, if it is smaller than this threshold, then there exists a sequence
of simple policies such that the probability of overflow goes to zero faster than
1/LK for any K ≥ 2, where L is the length of the data buffer, and average delay
is upper bounded by some constants if there is no constraint on the data buffer
length. This threshold is the solution to a dynamic programming problem. Similar
results were obtained for the case of multiple access channels. We considered two
situations for the multiple access channels, when tho users have separate energy
buffers, and when they share a single energy buffer.
78

CHAPTER 6
CONCLUSION
6.1 Summary of Contributions
Resource allocation in wireless systems plays an important role in increasing
the efficiency of the systems by adaptively changing the rate or power of the
transmitter according to the channel fluctuations. In practice, complete or partial
channel state information at the transmitter makes this possible. In this work,
we assume that complete CSI is available at both the receiver and transmitter to
study the fundamental limits of the wireless systems, even though complete CSI
is an idealistic assumption in practical systems.
Generally, we are interested in optimizing a performance metric, e.g., maxi-
mizing the throughput or minimizing the delay of the system. However, practical
constrains are always imposed on real systems. In this thesis, we focused on power
and energy constraints imposed by applications, system design considerations, and
regulatory limitations. In particular, we considered long-term power constraints
to capture the life time of a rechargeable wireless device, short-term power con-
straints to model the regulations imposed by FCC, per-antenna power constraints
to avoid nonlinearity and distortion in the RF chains, and energy constraints (or
hard power constraints) to model the limitations in an energy harvesting systems.
In this thesis, we formulated optimization problems to derive the optimal power
and rate policies subject to the constraints discussed above. Once the system
79

was modeled and the objective functions and constraints were mathematically
formulated, we used different techniques from convex optimization theory and
stochastic processes to find the optimal power and rate policies. In the following
paragraphs, we summarize our results.
In Chapter 3, we derived the optimal power allocation in a fading environment
to maximize the ergodic capacity if the input power is subject to long- and short-
term power constraints for SISO and MIMO systems. Furthermore, we determined
a suboptimal power allocation if the input power is subject to long-term and
per-antenna power constraints and if the input power is subject to long-term,
short-term, and per-antenna power constraints in MIMO systems. We studied
the conditions for which one or more of the power constraints can essentially be
eliminated. In addition, we observed that the ratio of the power constraints plays
an important role in determining the optimal/suboptimal power allocation.
In Chapter 4, we specialized the problem of Chapter 3 to Rayleigh fading
models. We focused on the first scenario in which the input power is subject
to long- and short-term power constraints and obtained some of the constants
and thresholds introduced in the power policies in Chapter 3. In fact, most of
these constants are simply a function of the distribution of the fading coefficients.
We simplified the calculations needed to obtain the constants for SISO, MISO,
and MIMO systems with Rayleigh fading. In addition, numerical results suggested
that for the Rayleigh fading case, a short-term power constraint that is larger than
a long-term power constraint does not significantly impact the ergodic capacity of
the channel.
In Chapter 5, we mathematically formulated a model in which data and en-
ergy arrive randomly according to different arrival processes and are stored in data
80

and energy buffers. The objective is to spend the harvested energy to transmit
the stored data in such a way that a delay criterion, e.g., average delay in the
data buffer or probability of overflow, is minimized subject to the hard power
constraints imposed by the available energy. We characterized the asymptotically
optimal rate policies for such a system model, and proved some converse and
achievability theorems for both point-to-point channels and multiple access chan-
nels with two users. We considered two situations for the multiple access channels,
when tho users have separate energy buffers, and when they share a single energy
buffer.
6.2 Future Work
Many extensions can be pursued from the foundation of this thesis. In the
following, we motivate some important problems as extensions to different aspects
of our work. For each main chapter in this thesis, we introduce some extensions
in the context of that chapter.
For Chapter 3, we believe that following extensions are examples of possible
future work.
• Since we only considered point-to-point channels, this work can be natu-
rally extended to multiple access channels. However, the optimal power
policies for this situation are much more complex, since the ergodic sum
capacity formula, i.e., the objective function, is more involved and for each
user we should consider short-term, long-term and per-antenna power con-
straint, which increases the number of Lagrange multipliers and makes the
optimization problem much more intricate. We might also consider fairness
criteria for each user in multiple access channels. Another possible extension
81
is studying the broadcast channels. In this case, the objective function would
be even more complicated than the one for the multiple access channels.
• We have only focused on allocating power in time and space dimensions.
However, in frequency-selective fading channels with orthogonal frequency-
division multiplexing (OFDM) modulation, allocating power across frequency
also becomes important. In fact, this problem could be even more interest-
ing from a practical point of view, since it also allows capturing the FCC
constraints in a more general context, i.e., we can consider a spectral mask,
which is enforced by FCC, in our problem formulation.
• Complete CSI at both the receiver and transmitter was assumed in this
work. However, in practical systems, we may only have limited feedback and
therefore imperfect CSIT. Furthermore, CSI at the receiver could be noisy
due to the estimation error at the decoder. This motivates studying the
problem if only partial CSI is available at the receiver and/or transmitter.
In fact, in the LTE Advanced standard, only up to 8-bits of feedback is
allowed to report the Channel Quality Indicator (CQI) [23], which suggests
studying power allocations with these practical constraints.
For Chapter 4, we motivate the following extension.
• As we discussed, for the Rayleigh fading case, a short-term power constraint
that is larger than a long-term power constraint does not significantly impact
the ergodic capacity of the channel. It would be interesting to study other
fading models determine the properties of the fading distribution that lead
to this conclusion. For example, the effect of short-term power constraints
on the ergodic capacity is considerable if the model is Rayleigh fading with
82

log-normal shadowing as discussed in [24]. By studying other fading models,
such as Nakagami fading, Weibull fading, and Rician fading, we might infer
different conclusions about the role of each of the power constraints in the
optimal power allocation structure and in the resulting ergodic capacity.
Finally, in the context of Chapter 5, we suggest the following extensions.
• Our main result, which introduced a threshold and established converse and
achievability theorems if the average data arrival is larger or smaller than
this threshold, suggests studying the problem of determining this threshold.
It is in fact the maximum average rate that can be transmitted subject to
hard power constraints if we assume that there is always data waiting for
transmission at the encoder (or if there is no data buffer in the problem).
As we mentioned earlier, this is a dynamic programming problem and is
partially studied in [20] in which some suboptimal power policies are derived.
However, finding the properties of the optimal policy as well as determining
upper and lower bounds for the optimal solution to this problem in terms of
the average energy arrival rate would enable us to analyze the probability
of overflow or average delay in our main problem only based on the average
arrival data rate and average energy arrivals.
• Optimal policies: It is known that there is not a closed form solution to
dynamic programming problems. However, it is possible to characterize
some properties of the optimal policies. It is intuitive that the optimal
policy is non-decreasing in the state of energy buffers, in the state of the
data buffer, and in the current fading coefficient, i.e., the more energy in the
energy buffer, or the more bits in the data buffer, or the larger the channel
83

gain, the more bits that should be transmitted in the optimal policy. Proving
these intuitive observations can be considered as an important future work,
which will require some tools and techniques from dynamic programming
and optimal control.
Furthermore, it would be helpful to characterize the exact optimal policy in
a more simplified problem. As an example, consider the situation in which
energy arrivals, rate arrivals, and fading coefficients are binary, i.e., they can
be either zero or equal to a fixed amount, and the length of data buffer and
the capacity of energy buffer is finite. The exact solution to this simplified
problem could be helpful to figuring out the properties of the optimal power
policies for the general problem.
• We have considered two possibilities for the data buffer, with finite length
equal to L and without any constraint on the data buffer, but we did not
assume any constraint on the capacity of the energy buffer. In a realistic
situation, we are not able to harvest an infinite amount of energy. Studying
the same problem assuming that the capacity of the energy buffer is finite
can be another extension to this work.
• In the multiple access section, we observed that the average allowable rate
region for cooperative users contains the one for separate users. Obtain-
ing these two rate regions is again another dynamic programming problem.
Finding some outer and inner bounds for the difference of these two rate
regions can be done by using dynamic programming techniques. To the
best of our knowledge, this problem has not been studied before and can be
interesting as a possible future work.
84

BIBLIOGRAPHY
1. Federal Communictions Commission: Rules and Regulations, 2010. URLhttp://www.fcc.gov/oet/info/rules/.
2. M. S. Alouini and A. J. Goldsmith. Capacity of Rayleigh Fading Channelsunder Different Adaptive Transmission and Diversity-Combining Techniques.IEEE Transactions on Vehicular Technol, 48(4):1165–1181, 1999.
3. R. Berry. Power and Delay Trade-Offs in Fading Channels. PhD thesis, MIT,Cambridge, MA, 2000.
4. R. Berry and R. Gallager. Communication over Fading Channels with DelayConstraints. IEEE Transactions on Information Theory, 48(5):1135–1149,2002.
5. D. Bertsekas. Dynamic Programing and Optimal Control, vol. I and II. Bel-mont, MA: Athena Scientific, 1995.
6. S. Boyd and L. Vandenberghe. Convex Optimization. Cambridge, U.K.: Cam-bridge Univ. Press, 2004.
7. G. Caire, G. Taricco, and E. Biglieri. Optimum Power Control over FadingChannels. IEEE Transactions on Information Theory, 45(5):1468–1489, 1999.
8. R. R. Chen and Y. Lin. Optimal Power Control for Multiple Access Chan-nel with Peak and Average Power Constraints. In Proceedings of IEEE In-ternational Conference on Wireless Networks, Communications and MobileComputing, pages 1407–1411, 2005.
9. A. Feiten, R. Mathar, and S. Hanly. Eigenvalue-Based Optimum-Power Al-location for Gaussian Vector Channels. IEEE Transactions on InformationTheory, 53(6):2304–2309, 2007.
10. W. Feller. An Introduction To Probability Theory and Its Applications, vol.2. Wiley, New York, 1957.
11. R. Gallager. Discrete Stochastic Processes. Kluwer Academic Publishers,Boston, 1996.
85

12. A. Goldsmith, S. A. Jafar, N. Jindal, and S. Vishwanath. Capacity Limits ofMIMO Channels. IEEE Journal on Selected Area in Communications, 21(5):684–702, 2003.
13. A. J. Goldsmith and P. P. Varaiya. Capacity of Fading Channels with ChannelSide Information. IEEE Transactions on Information Theory, 43(6):1986–1992, 1997.
14. B. M. Hochwald and L. M. A. Jalloul. Statistical Distributions That Arise inConstrained Beamforming with Incomplete Channel Information. In Proceed-ings of IEEE Information Theory and Applications Workshop (ITA), pages1–10. San Diego, CA, USA, 2010.
15. S. K. Jayaweera and H. V. Poor. Capacity of Multiple-Antenna Systems withBoth Receiver and Transmitter Channel State Information. IEEE Transac-tions on Information Theory, 49(10):2697–2709, 2003.
16. M. A. Khojastepour and B. Aazhang. The Capacity of Average and PeakPower Constrainted Fading Channels with Channel Side Information. InProceedings of IEEE Wireless Cotnitnnications and Networking Conference(WCNC), pages 77–82, 2004.
17. R. Knopp and P. Humblet. Information Capacity and Power Control in Single-Cell Multiuser Communications. In Proceedings of IEEE International Con-ference on Communications (ICC), pages 331–335. Seattle, WA , USA, 1995.
18. A. W. Marshall and I. Olkin. Theory of Majorization and Its Applications.New York: Academic, 1979.
19. S. Musy and E. Telatar. On the Transmission of Bursty Sources. In Proceedingsof IEEE International Symposium On Information Theory (ISIT’06), pages2899–2903. Seattle, WA, USA, 2006.
20. O. Ozel, K. Tutuncuoglu, J. Yang, S. Ulukus, and A. Yener. Adaptive Trans-mission Policies for Energy Harvesting Nodes in Fading Channels. In Con-ference on Information Sciences and Systems (CISS). Baltimore, MD, USA,2011.
21. D. P. Palomar. Unified Framework for Linear MIMO Transceivers with Shap-ing Constraints. IEEE Communication Letters, 8(12):697–699, 2004.
22. R. Rajesh and V. Sharma. Capacity of fading gaussian chan-nel with an energy harvesting sensor node. Available online athttp://arxiv.org/PS cache/arxiv/pdf/1010/1010.5416v1.pdf.
86

23. S. Sesia, I. Toufik, and M. Baker. LTE: The UMTS Long Term Evolution.John Wiley and Sons, 2009.
24. Z. Shen, R. W. Heath, J. G. Andrews, and B. L. Evans. Comparison of Space-Time Water-filling and Spatial Water-filling for MIMO Fading Channels.In Proceedings of IEEE Global Telecommunications Conference (GLOBE-COM’04), pages 431–435, 2004.
25. E. Telatar. Capacity of Multi-Antenna Gaussian Channels. Eur. Trans.Telecomm. ETT, 10(6):585–596, 1999.
26. E. Telatar and R. Gallager. Combining queueing theory with informationtheory for multiaccess. IEEE Journal on Selected Areas in Communications,13(6):963–969, 1995.
27. D. Tse. Variable-rate Lossy Compression and its Effects on CommunicationNetworks. PhD thesis, MIT, Cambridge, MA, 1994.
28. D. Tse and S. Hanly. Multiaccess Fading Channels-Part I: Polymatroid Struc-ture, Optimal Resource Allocation and Throughput Capacities. IEEE Trans-actions on Information Theory, 44(7):2796–2815, 1998.
29. D. N. C. Tse and P. Viswanath. Fundamentals of Wireless Communications.Cambridge, U.K.: Cambridge Univ. Press, 2005.
30. J. Yang and S. Ulukus. Optimal packet scheduling in an en-ergy harvesting communication system. submitted to IEEETransactions on Communications, June 2010, available athttp://www.ece.umd.edu/ ulukus/papers/journal/opt-sch-ener-harv.pdf.
This document was prepared & typeset with pdfLATEX, and formatted withnddiss2ε classfile (v3.0[2005/07/27]) provided by Sameer Vijay.
87