Embed Size (px)
Citation preview
La informaci�on y las m�aquinas�
Javier AracilEscuela Superior de Ingenieros
Universidad de Sevilla
1 La era de la informaci�on
Nuestra �epoca, rica y variada como pocas, posee, sin embargo, algunos ras-gos que contribuyen a darle una cierta unidad. Uno de ellos es, sin duda, elde la relevancia que adquiere en ella la informaci�on. Sin embargo, inmediata-mente advertimos lo evasivo de este concepto, la di�cultad de de�nirlo. Nosencontramos en una situaci�on semejante a la de San Agust��n con respecto altiempo: �el sab��a lo que era, mientras nadie se lo preguntara, pero tan prontocomo alguien lo hac��a se quedaba sin contestaci�on posible. Ante estos aparentescallejones sin salida siempre tenemos una soluci�on. Considerar el t�ermino encuesti�on como una primitiva que no admite de�nici�on y que, sin embargo, enprincipio hay un amplio consenso con relaci�on a qu�e signi�ca y, en consecuencia,lo incorporamos, con aparente tranquilidad, a nuestras descripciones del mundo.Porque, en efecto, hoy en d��a resulta casi imposible desenvolverse sin hablar deinformaci�on. Cualquiera que sea el �ambito del que estemos hablando la ideade informaci�on est�a siempre presente. Por ejemplo, es patente que cada vezes menor el porcentaje de poblaci�on activa dedicada a la producci�on de bienestangibles, y mayor el de los dedicados, de una forma u de otra, a procesar infor-maci�on. El sector terciario de la econom��a est�a pr�acticamente dedicado a estaforma de actividad: la investigaci�on y la ense~nanza, el mundo de las �nanzas,los medios de comunicaci�on, el mundo del ocio y tantos otros tienen un modode actividad que consiste fundamentalmente en adquirir, procesar y transmitirinformaci�on.
Algunas de las ramas m�as innovadoras de la ciencia moderna son tambi�enininteligibles sin el concepto de informaci�on. Por ejemplo, el c�odigo gen�etico,posiblemente el mayor descubrimiento biol�ogico de nuestro tiempo, ha puestode mani�esto como la esencia misma de la vida est�a asociada a procesos en
�Conferencia pronunciada en el Ateneo de Sevilla el 20 de febrero de 2001.
1

los que la informaci�on juega un papel esencial. Al �n y al cabo todo ser vivoes un sistema abierto que se sustenta mediante el procesamiento de materia,energ��a e informaci�on. Los recientes trabajos sobre el genoma son otra muestra,que est�a teniendo, en estos d��as, una considerable incidencia en los medios decomunicaci�on, como pone de mani�esto el chiste aparecido en la primera p�aginadel diario Le Monde (13-02-01) y que se reproduce en la �gura 1. No hace faltamucha imaginaci�on para comprender que el hombre asciende por la escalerade la informaci�on. Quiz�as entre las ciencias b�asicas la f��sica haya sido la m�asreticente a aceptarla. Se comprende que as�� sea porque a principios del siglo xx
todav��a la f��sica pretend��a reducirlo todo a materia y energ��a, las dos primitivascon las que pretend��a alcanzar una descripci�on completa del mundo. Estas dosprimitivas del f��sico cl�asico quedaron fusionadas en una sola con la teor��a dela relatividad. Sin embargo, en el propio seno de la f��sica, tras el misteriosoconcepto de entrop��a, hac��a su aparici�on en escena, en forma m�as o menosencubierta, el de informaci�on, y con �el una nueva primitiva.
Figura 1: Ascenso por la escala de la informaci�on.
Dec��a al principio que el concepto de informaci�on a�un no lo tenemos clara-mente establecido {acaso tampoco los de materia y energ��a, y menos a�un alaparecer fundidos en uno solo. Pero si nos proponemos una primera aproxi-maci�on a este concepto, convendremos que es algo cuya posesi�on por un agentehace que modi�que su conducta. Es decir, lo que har��a alguien antes de recibiruna informaci�on es diferente de lo que har�a despu�es de hacerlo. De este modola informaci�on tiene connotaciones con el tiempo y por tanto tambi�en con laentrop��a. Ya se ve que la alusi�on a San Agust��n con la que inici�abamos estaconferencia no es simplemente una analog��a super�cial.
Esta noci�on de informaci�on puede precisarse enriqueci�endola con la noci�onde probabilidad, y formulando c�omo, para un agente, cambia la probabilidad deque se produzca un determinado suceso debido a la recepci�on de informaci�on.Estas ideas, convenientemente reelaboradas, condujeron a Claude Shannon, en
2

1948, a la formulaci�on de una teor��a matem�atica de la informaci�on. Teor��a que,sin embargo, limita su aplicaci�on a los procesos de transmisi�on de informaci�onpor canales de comunicaci�on, relacionando la entrop��a de la fuente con la ca-pacidad de transmisi�on por el correspondiente canal. El teorema fundamentalde Shannon establece limitaciones a esta capacidad de transmisi�on. Es notablerelacionar ese teorema con los de G�odel o Turing que levantan fronteras entrelo que es posible en principio alcanzar y lo que es imposible. Sin embargo, losresultados de Shannon, con toda su brillantez, no resultan relevantes al temaque aqu�� nos ocupa: la relaci�on entre la informaci�on y las m�aquinas. Con-viene, no obstante, traerlos a colaci�on puesto que forman parte del substratodel que emergen las aplicaciones del concepto de informaci�on a la concepci�on dem�aquinas.
2 Las m�aquinas tambi�en incorporan informaci�on
As�� pues, vamos a ocuparnos de la incidencia de la informaci�on en el fun-cionamiento de las m�aquinas. Si el concepto de informaci�on tenemos que acep-tarlo aunque no sepamos precisarlo, el de m�aquina es much��simo m�as vago ygeneral. En lo que sigue entender�e por m�aquina el arquetipo de objeto t�ecnico,es decir, producto de la actividad t�ecnica del hombre, mediante el cual nues-tra especie, en una compulsiva b�usqueda de la satisfacci�on de sus necesidadessiempre crecientes {cuyo horizonte se nos escapa continuamente{ ha edi�cadoel mundo arti�cial en el que hoy se desenvuelve nuestra vida, llegando inclusoa envolvernos a nosotros mismos con las pr�otesis con las que remediamos nues-tras de�ciencias. A�un a riesgo de pecar de trivialidad es patente que en todolo que nos rodea aparece el rastro de la actuaci�on t�ecnica del hombre, de laingenier��a. Ni siquiera los pretendidos reductos de la naturaleza que son loseufem��sticamente denominados parques naturales son ajenos a la intervenci�onhumana. Tenemos que asumir que, por acci�on de la t�ecnica, nuestra especieha conseguido transformar el mundo natural en otro arti�cial en el que aunquecierta moda tienda a resaltar exclusivamente sus aspectos negativos, es induda-ble que con �el hemos alcanzado cotas de bienestar y de longevidad inimaginablesen un mundo natural. As�� pues voy a referirme a las m�aquinas en un sentidomuy amplio que pretende englobar todos los artefactos, producto de la t�ecnica,de cualquier naturaleza que sean. Pues bien, en las entra~nas de estos artefactos,en nuestro tiempo, la informaci�on ha pasado a jugar un papel primordial. Estaidea es la que pretendo desarrollar en lo que sigue.
Bajo una perspectiva muy general podemos considerar a una m�aquina comoun proceso en cuyo seno se producen interacciones entre las diferentes partes quela componen. Este proceso se controla mediante la actuaci�on sobre determina-
3

dos mandos que se pueden activar desde su exterior (pulsando botones, girandovolantes, moviendo palancas, ...). Con estos actuadores se puede gobernar elcomportamiento de una m�aquina. As��, si un operador dispone de informaci�onsobre ese comportamiento (es decir, conoce los valores alcanzados por las magni-tudes relevantes: por ejemplo, una posici�on, velocidad, temperatura, o cualquierotra magnitud imaginable) actuar�a sobre la m�aquina, mediante los mandos antesindicados, para conseguir que su comportamiento se ajuste a sus prop�ositos.
En la �gura 2a se presenta esquem�aticamente este proceso de actuaci�on. Eloperario, recibe la informaci�on del proceso, la procesa de acuerdo con las normasque le han sido suministradas, y act�ua en consecuencia. La funci�on del operador,en el caso de procesos continuos que se trata de mantener constantes durantelargos per��odos de tiempo, puede ser extremadamente tediosa. A principios desiglo, en determinadas industrias de proceso qu��micas, se dotaba al operario deuna banqueta con una sola pata, para que tuviese una cierta comodidad peroevitando que la rutina no le llevase a la somnolencia.
La cuesti�on que se suscita ahora es: >cabe la posibilidad de que las propiasm�aquinas lleven a cabo su propio proceso de gobierno? >Es posible concebiruna m�aquina adicional que se encargue de esta misi�on? La respuesta a estaspreguntas, como es bien sabido, es a�rmativa y de llevarla a la pr�actica se ocupala ingenier��a de control (�gura 2b).
Esta rama de la ingenier��a, conocida tambi�en como autom�atica, es de laspocas que tiene ra��ces precursoras en nuestro pa��s. De hecho, la propia denomi-naci�on de autom�atica tiene sus or��genes en los trabajos de Torres Quevedo queescribi�o unos seminales \Ensayos sobre Autom�atica.- Su de�nici�on. Extensi�onte�orica de sus aplicaciones"1 y de un precursor Laboratorio de Autom�atica. Tor-res Quevedo postula que, de manera natural, las m�aquinas encargadas de susti-tuir al operador humano en las funciones de control antes mencionadas debenestar dotadas de unos sensores que registren informaci�on con relaci�on al com-portamiento de la m�aquina, un �organo de procesamiento de esta informaci�on,que hoy denominamos �organo de control o controlador, y unos actuadores queconviertan la informaci�on generada en el �organo de control en actuaciones con-cretas sobre la m�aquina cuyo comportamiento se trata de gobernar. En el escritode Torres Quevedo hay una peque~na joya ling�u��stica que lamentablemente losingenieros de control no hemos sido capaces de cuidar y conservar. Dice TorresQuevedo que la funci�on fundamental del �organo de control es el discernimiento
1Publicado originalmente en la Revista de la Real Academia de Ciencias Exactas, F��sicas y
Naturales de Madrid, en el n�umero correspondiente al mes de enero de 1914, p�aginas 391 a 419y que alcanz�o gran difusi�on al ser traducido al franc�es en la R�evue G�en�erale des Sciences Pures
et Appliqu�ees con el t��tulo \Essais sur l'Automatique. Sa d�e�nition. �Etendue th�eorique de sesapplications". Se dispone de una reciente edici�on de estos trabajos realizada por INTEMACen 1996.
4

Figura 2: Control manual y control autom�atico.
5

entre las diferentes opciones de actuaci�on que se presentan. Con la perspectivaactual no puede dejar de maravillar la propiedad del t�ermino.
Organo de Control
Actuadores
Sensores
Proceso a Controlar
Figura 3: Estructura de realimentaci�on.
En la �gura 3 se muestra el esquema general de una m�aquina dotada decontrol autom�atico {en la que se indican mediante bloques los sensores, el �organode control, y los actuadores{, en la que al propio proceso que se trata de controlarse ha a~nadido otra maquina, el �organo de control {que en la actualidad esnormalmente un ordenador{ que lleva a cabo las labores de controlarla. Lamaquina resultante posee una notable estructura en la que conviene detenerse.Si se observa la �gura se ver�a que hay una cadena circular de relaciones dein uencia. El proceso genera un comportamiento que es registrado medianteunos sensores, que a su vez suministran informaci�on al �organo de control, quedecide c�omo actuar sobre el proceso, actuaci�on que se lleva a cabo medianteunos actuadores que determinan modi�caciones en el comportamiento que, denuevo, son registradas por los sensores. Se reinicia as�� el proceso que, como esbien patente, da lugar a una cadena sin �n.
3 La estructura de realimentaci�on
La estructura causal circular impl��cita en la �gura 3 recibe la denominaci�onde estructura de realimentaci�on y constituye una de las m�as notables aporta-ciones de la ingenier��a del siglo xx, cuyas implicaciones trascienden ampliamenteeste campo de actividad. Lo primero que hay que decir con relaci�on a la es-tructura de realimentaci�on es que su aplicaci�on pr�actica es menos trivial de loque parece. La relaci�on causal circular, impl��cita en esa estructura, junto con
6

los inevitables retrasos que se producen a lo largo de ella, produce fen�omenosde inestabilidad que pueden llevar a situaciones delicadas y cuyo estudio sis-tem�atico requiere el concurso de importantes complementos matem�aticos. Estoes algo que lamentablemente escap�o a la perspicacia de Torres Quevedo y queha lastrado el reconocimiento de su aportaci�on.
Precisamente unos diez a~nos despu�es de que Torres Quevedo publicase susre exiones sobre autom�atica, un ingeniero de telecomunicaciones americano,Harold Black establec��a las bases del ampli�cador realimentado cuyo estudiosistem�atico por parte de �el mismo, y de los tambi�en ingenieros Harry Nyquisty Hendrik W. Bode, dio lugar a m�etodos sistem�aticos para el dise~no y an�alisisde controladores que constituyen la base del cuerpo disciplinario sobre el que seha edi�cado la ingenier��a de control.
La estructura de realimentaci�on pone de mani�esto la relevancia de la in-formaci�on para el gobierno del funcionamiento de una m�aquina. De hecho, elcontrolador, es un procesador de informaci�on que se alimenta con la que sumi-nistran los sensores con relaci�on al comportamiento de la m�aquina, y produce,de ese procesamiento, otra informaci�on relativa a c�omo debe actuarse sobreel proceso en cuesti�on para conseguir que el comportamiento sea el requerido.Es f�acil ver que esta estructura est�a presente en todo proceso de decisi�on conindependencia del dominio en el que se adopte. Pero ahora no nos interesa de-tenernos en este punto, sobre el que volveremos luego, sino resaltar otro aspectonotable de la estructura de realimentaci�on. Mediante su concurso lo que hace-mos es dosi�car la inyecci�on de energ��a exterior para actuar sobre el proceso quetratamos de gobernar, a partir de informaci�on. La sutileza de este matiz se ponede mani�esto en la �gura 4. La energ��a externamente inyectada act�ua sobre elproceso a controlar a trav�es de los actuadores, que se encargan de dosi�carla,atendiendo a las instrucciones que les suministra el �organo de control.
La informaci�on relativa a la actuaci�on sobre el proceso desencadena la in-yecci�on de energ��a para conseguir que la m�aquina alcance el objetivo propuesto.La mera informaci�on de c�omo actuar no es su�ciente si con ella no somos capacesde desencadenar la actuaci�on de la fuerza correspondiente. Este hecho est�a enlos or��genes de una de las aplicaciones m�as antiguas que se conocen de los sis-temas realimentados: los servomecanismos de posicionamiento de los timonesde los barcos. El mecanismo correspondiente, basado en una estructura de re-alimentaci�on, consigue dosi�car la energ��a que posiciona efectivamente el tim�ona partir del conocimiento de la discrepancia entre su posici�on real y la deseada.La estructura de realimentaci�on suministra un mecanismo mediante el cual seconsigue que el comportamiento del sistema anule esta discrepancia, y el tim�onse coloque en la posici�on deseada (algo an�alogo sucede en las servodireccionesde los coches a las que estamos tan familiarizadas).
7

Inyección Externa de
Energía
Organo de Control
Actuadores Proceso a Controlar
Sensores
Figura 4: Inyecci�on de energ��a dosi�cada mediante la informaci�on que suministrala realimentaci�on.
8

La estructura de realimentaci�on permite un uso muy exible. Es posible,por ejemplo, concebir otra estructura de realimentaci�on que act�ue sobre la di-rectamente implicada en el proceso que se trata de controlar. Se tiene entonceslo que se conoce como control adaptativo. En esta forma de control, la nuevaestructura de realimentaci�on trata de ajustar el controlador a eventuales cam-bios en el entorno en el que est�a inmerso el sistema. Se tienen, por tanto, dosestratos de actuaci�on. Uno mediante el cual el controlador corrige la variableque se trata de controlar. Un segundo mediante el cual se act�ua sobre el propiocontrolador ajust�andolo a cambios en el entorno. En la �gura 5 se muestra undiagrama en el que aparecen estos dos modos de realimentaci�on.
Planta
Controlador
u x
Mecanismo de adaptación
Figura 5: Control adaptativo. Estructura de adaptaci�on de un controlador porrealimentaci�on.
4 La realimentaci�on allende la ingenier��a
La ubicuidad de la estructura de realimentaci�on fue puesta de mani�esto porNorbert Wiener en su libro Cibern�etica2. El subt��tulo de este libro \El controly la comunicaci�on en el animal y en la m�aquina" es su�cientemente expresivo
2N. Wiener, Cybernetics, The M.I.T. Press, 1948, segunda edici�on ampliada en 1961. Deeste libro hay dos traducciones al espa~nol que distan mucho de hacerle justicia, una en Gua-diana de Publicaciones, 1960, y la otra en Tusquets Editores, 1985. Es un libro tan sugerentecomo dif��cil pero, en todo caso, no es conveniente que un traductor no entienda lo que traduce.
9

para nuestros prop�ositos. Postula Wiener que encontramos estructuras de re-alimentaci�on no s�olo en las m�aquinas autom�aticas que nosotros concebimos,sino en los propios procesos reales que est�an dotados de formas de gobiernoaut�onomo del comportamiento. Es lo que sucede en los seres vivos, a los queconsidera islotes antientr�opicos; es decir, enclaves en los que se contradicen lo-calmente los supuestos del segundo principio de la termodin�amica. Esta trans-gresi�on local parece estar ��ntimamente asociada con el procesamiento de la infor-maci�on impl��cito en la estructura de realimentaci�on. En efecto, los seres vivos,lo mismo que las m�aquinas dotadas de autocontrol, son sistemas abiertos, cuyofuncionamiento requiere el consumo de energ��a exterior al propio sistema. Puesbien, como hemos visto anteriormente, mediante la estructura de realimentaci�onse dosi�ca, de forma aut�onoma, la inyecci�on de energ��a externa de modo queel comportamiento del sistema alcanza a contravenir, durante el tiempo en quepermanece activo {vivo{ los principios de la termodin�amica (sin embargo, estees un extremo que a�un hoy no hemos logrado hacer su�cientemente expl��cito).No en balde Wiener caracteriza la informaci�on como la entrop��a con el signocambiado.
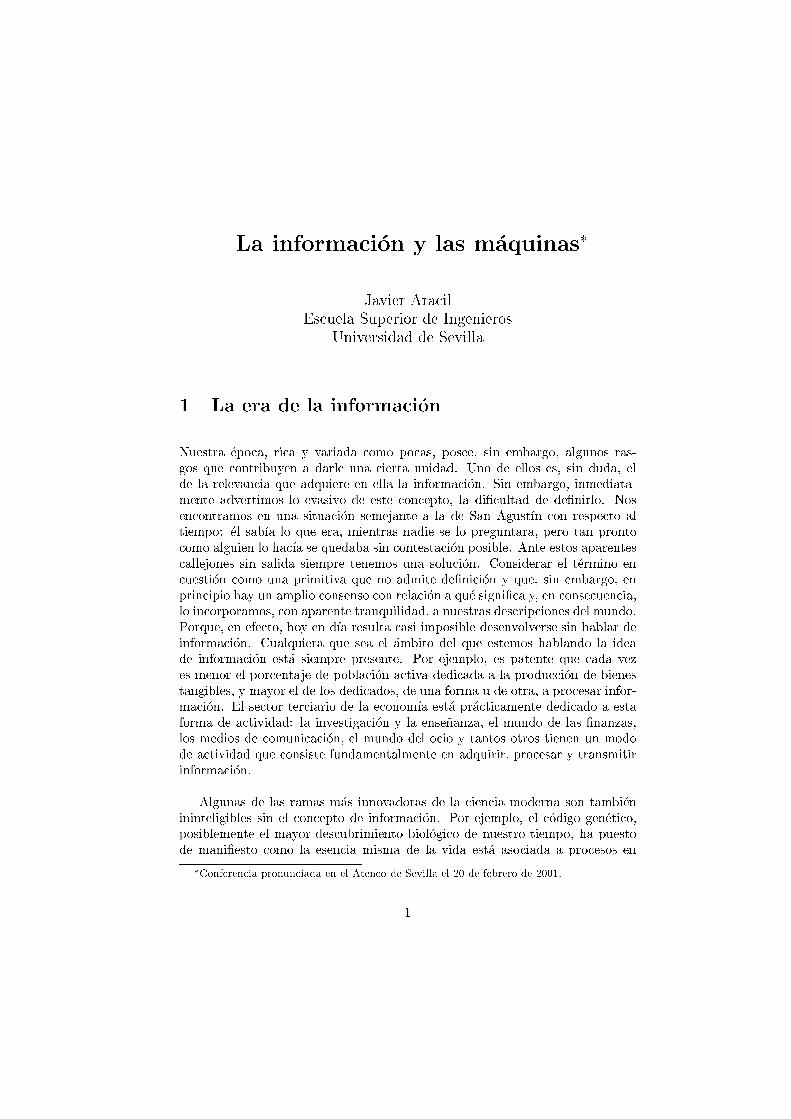
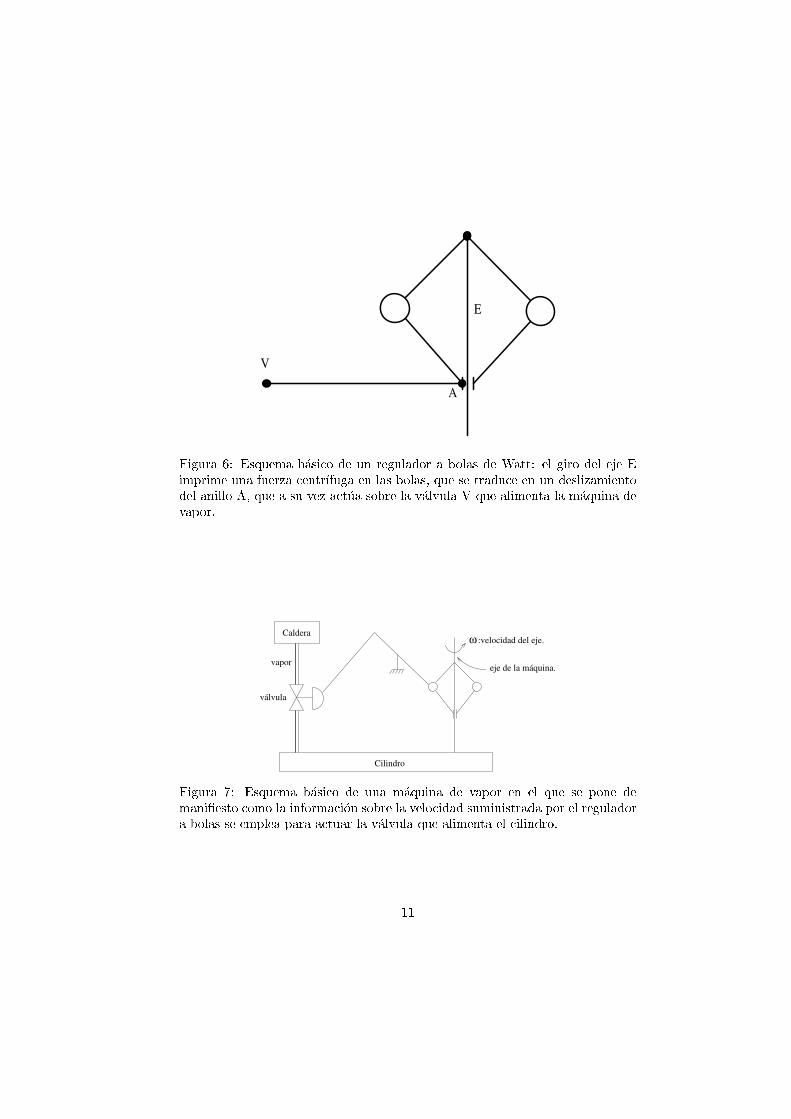
El hecho, a�un no bien comprendido hoy en d��a, de que informaci�on y entrop��aest�en relacionados posee ra��ces m�as profundas de lo que pudiera parecer. Porejemplo, en la conferencia anterior de este ciclo, el Profesor Zamora invocabaa la m�aquina de vapor como precursora de la disciplina que �el cultiva: la ter-modin�amica. Algo an�alogo podr��amos hacer ahora, y decir que en la m�aquinade vapor est�an igualmente las ra��ces de la disciplina que yo practico: el controlautom�atico. La m�aquina de vapor es tambi�en la protom�aquina automatizada,dotada de control autom�atico. En efecto, la m�aquina de vapor, que con todajusticia ha pasado a la historia por sus contribuciones energ�eticas a la revolu-ci�on industrial, incorpora en su concepci�on una estructura de realimentaci�onnegativa mediante el regulador a bolas de Watt. En la �gura 6 se muestra elesquema b�asico de un regulador a bolas de Watt, que act�ua como sensor de lavelocidad de giro del eje de la m�aquina de vapor. Este sensor est�a basado enun ingenioso mecanismo mediante el cual el giro del eje da lugar a una fuerzacentr��fuga en unas bolas que, a su vez, produce el deslizamiento de un anilloque, de este modo, \registra" la velocidad de giro de la m�aquina. Por tanto, esteanillo genera informaci�on sobre la velocidad de la m�aquina. Esta informaci�onse transmite mec�anicamente a la v�alvula que alimenta el cilindro de la m�aquinade vapor (�gura 7). Se tiene as�� una estructura realimentada que se muestramediante bloques en la �gura 8.
El regulador a bolas es esencial para el funcionamiento de la m�aquina, quese convierte as�� en referencia obligada en la historia de la autom�atica. M�as a�un,es precisamente en esta m�aquina en la que se registran por primera vez de formaclara, y con toda su virulencia, los fen�omenos de oscilaci�on par�asitos asociados alos sistemas realimentados. Los problemas inherentes a estas oscilaciones atraen
10
V
E
A
Figura 6: Esquema b�asico de un regulador a bolas de Watt: el giro del eje Eimprime una fuerza centr��fuga en las bolas, que se traduce en un deslizamientodel anillo A, que a su vez act�ua sobre la v�alvula V que alimenta la m�aquina devapor.
vapor
válvula
Cilindro
Caldera:velocidad del eje.
eje de la máquina.
ω
Figura 7: Esquema b�asico de una m�aquina de vapor en el que se pone demani�esto como la informaci�on sobre la velocidad suministrada por el reguladora bolas se emplea para actuar la v�alvula que alimenta el cilindro.
11
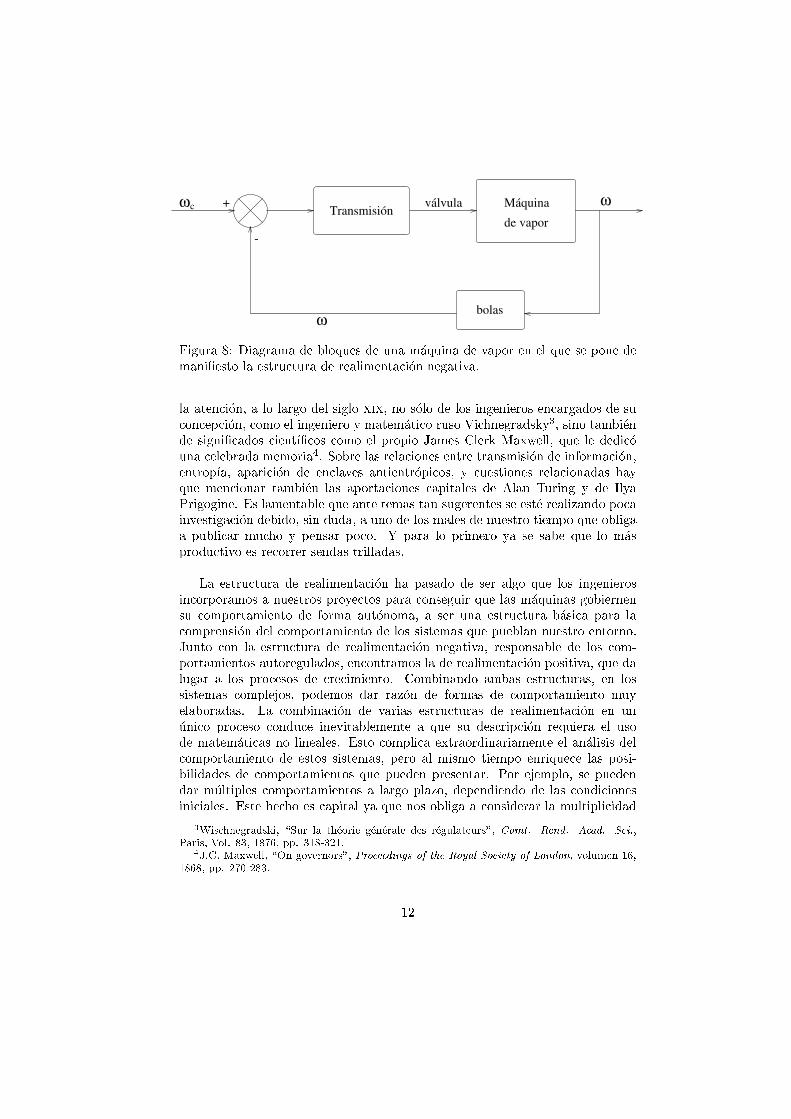
TransmisiónMáquina
de vapor
bolas
ωc ω
ω
válvula
-
+
Figura 8: Diagrama de bloques de una m�aquina de vapor en el que se pone demani�esto la estructura de realimentaci�on negativa.
la atenci�on, a lo largo del siglo xix, no s�olo de los ingenieros encargados de suconcepci�on, como el ingeniero y matem�atico ruso Vichnegradsky3, sino tambi�ende signi�cados cient���cos como el propio James Clerk Maxwell, que le dedic�ouna celebrada memoria4. Sobre las relaciones entre transmisi�on de informaci�on,entrop��a, aparici�on de enclaves antientr�opicos, y cuestiones relacionadas hayque mencionar tambi�en las aportaciones capitales de Alan Turing y de IlyaPrigogine. Es lamentable que ante temas tan sugerentes se est�e realizando pocainvestigaci�on debido, sin duda, a uno de los males de nuestro tiempo que obligaa publicar mucho y pensar poco. Y para lo primero ya se sabe que lo m�asproductivo es recorrer sendas trilladas.
La estructura de realimentaci�on ha pasado de ser algo que los ingenierosincorporamos a nuestros proyectos para conseguir que las m�aquinas gobiernensu comportamiento de forma aut�onoma, a ser una estructura b�asica para lacomprensi�on del comportamiento de los sistemas que pueblan nuestro entorno.Junto con la estructura de realimentaci�on negativa, responsable de los com-portamientos autoregulados, encontramos la de realimentaci�on positiva, que dalugar a los procesos de crecimiento. Combinando ambas estructuras, en lossistemas complejos, podemos dar raz�on de formas de comportamiento muyelaboradas. La combinaci�on de varias estructuras de realimentaci�on en un�unico proceso conduce inevitablemente a que su descripci�on requiera el usode matem�aticas no lineales. Esto complica extraordinariamente el an�alisis delcomportamiento de estos sistemas, pero al mismo tiempo enriquece las posi-bilidades de comportamientos que pueden presentar. Por ejemplo, se puedendar m�ultiples comportamientos a largo plazo, dependiendo de las condicionesiniciales. Este hecho es capital ya que nos obliga a considerar la multiplicidad
3Wischnegradski, \Sur la th�eorie g�en�erale des r�egulateurs", Comt. Rend. Acad. Sci.,Paris, Vol. 83, 1876, pp. 318-321.
4J.C. Maxwell, \On governors", Proceedings of the Royal Society of London, volumen 16,1868, pp. 270-283.
12

de comportamientos que puede presentar un �unico sistema dependiendo de esascondiciones. Los sistemas no lineales tambi�en pueden aparecer oscilaciones que,en el caso de ser aperi�odicas, conducen al fascinante mundo del caos, en el quela capacidad de previsi�on de ciertos sistemas deterministas resulta signi�cativa-mente mermada, y cuyas consecuencias a�un estamos empezando a entender.
Estas complejas estructuras, con m�ultiples procesos de realimentaci�on in-teractuando entre s��, adem�as de encontrarse en los sistemas biol�ogicos, espe-cialmente en los procesos homoest�aticos mediante los cuales los seres vivosmantienen invariables sus constantes vitales, y tambi�en en los procesos ecol�ogicos,en la din�amica de poblaciones, las encontramos tambi�en en los sistemas sociales.De este modo los estudios sobre estabilidad, y tantos otros, como los relativosa optimizaci�on, desarrollados por los ingenieros para mejor entender el compor-tamiento de sus esquivas m�aquinas aut�onomas, est�an encontrando un orecientecampo de aplicaciones en todos estos campos, que van m�as all�a del reducto dela ingenier��a de control.
5 La realimentaci�on y las formas complejas de
comportamiento
El comportamiento aut�onomo de las m�aquinas, mediante el cual ellas mismastoman las decisiones para conseguir los objetivos propuestos, es tan sorpren-dente que no es extra~no que se haya producido un cierto embaucamiento queha conducido a denominar \inteligente" a este comportamiento. Al movernospor el dominio de la informaci�on parece natural toparnos con el concepto deinteligencia; al �n y al cabo, una de las manifestaciones del quehacer inteligentees procesar informaci�on con vistas a tomar decisiones. Aunque estas decisionessean el resultado de aplicar reglas claramente establecidas no por ello dejamosde asociar a ese modo de actividad un contenido de alguna forma \intelectual".Podr��amos imaginar una prueba semejante a la de Turing mediante la cual nosplante�asemos si un determinado comportamiento ( y no una serie de preguntasy respuestas, como en el caso de Turing) permiten decidir si el comportamientode la m�aquina es \inteligente" o no. Soy de los suspicaces con relaci�on a lapropiedad de esa denominaci�on que m�as parece una degradaci�on del t�erminoque un uso adecuado. Si bien, en algunos casos, resulta adecuado empleart�erminos zoomorfos con relaci�on a las m�aquinas, y as�� hablar del brazo de unrobot o las alas de un avi�on, parece que el t�ermino inteligencia deber��a reservarsepara funciones m�as propias de la especie humana, y m�as cuando, en este �ultimoempleo, a�un no acabamos de entender qu�e es la inteligencia. Sin embargo, porel indudable impacto comercial que tiene esa denominaci�on por un lado y, por
13

otro, por el desmedido af�an de celebridad de algunos constructores de m�aquinas,el caso es que ese t�ermino ha hecho fortuna y ya se ha incorporado al lenguajeordinario. As�� cada vez m�as se oye hablar de la adici�on de inteligencia a un au-tom�ovil o a un electrodom�estico, de un edi�cio inteligente, u otros usos similares,especialmente cuando uno es el comprador de esos productos. En todos estoscasos la denominaci�on debe recibirse con una sonrisa esc�eptica y hay que pensarque se trata, sencillamente, de la incorporaci�on de una (o de varias) estructurade realimentaci�on que, mediante un adecuado tratamiento de la informaci�onprocedente del artefacto en cuesti�on, decide la mejor manera de comportarse lam�aquina para alcanzar determinados objetivos en su comportamiento.
Una m�aquina es el prototipo de un sistema, de una entidad que resultade la adecuada coordinaci�on de las partes constituyentes. En este sentido lasm�aquinas han suministrado una met�afora del mundo como sistema complejopara cuya intelecci�on hab��a que recurrir al conocimiento de los mec�anismosconstituyentes y de c�omo se relacionan entre s��. Ya en la antig�uedad Lucrecioen su De la Naturaleza de las cosas habl�o de la machina mundi. En tiemposm�as cercanos a nosotros, esta met�afora, inspir�o, en gran medida, la �losof��ade Descartes. Sin embargo, en esa visi�on de las cosas parec��a asumirse queconociendo las propiedades de los elementos constituyentes ser��amos capaces decomprender las del sistema resultante de su integraci�on. Esta postura �los�o�case conoce como reduccionismo �sicalista. Frente a este punto de vista, muyquerido por los f��sicos, se ha propuesto otro, m�as apreciado por bi�ologos yespecialistas en ciencias sociales, en virtud del cual las propiedades del sistemano dependen tanto de las de los elementos constituyentes sino de la forma comoestos elementos se integran en la unidad de orden superior que es el sistema. Lospartidarios de este segundo punto de vista son los sistemistas, que pretendenestudiar lo propiamente sist�emico. La estructura de realimentaci�on permiteilustrar de forma muy clara lo que se entiende por una propiedad sist�emica.En el comportamiento de un sistema (objeto formado por una serie de partesen interacci�on) una propiedad sist�emica es aquella que depende de la forma deorganizarse los objetos que forman el sistema, en la estructura del sistema, y node las propiedades de estos objetos. El comportamiento autorregulador asociadoa una estructura de realimentaci�on negativa, lo mismo que el comportamientoexplosivo asociado a una positiva, es un claro ejemplo de qu�e se entiende por unapropiedad sist�emica. De este modo la estructura de realimentaci�on constituyeuno de los pilares metodol�ogicos para el desarrollo de una teor��a de sistemas quese viene reclamando insistentemente desde distintos foros, en unos tiempos enlos que la complejidad es una nota dominante, pero que todav��a no ha llegadoa cuajar en un cuerpo de conocimiento establecido.
Llegados a este punto acaso convenga concretar lo que se acaba de decir yreferirlo a un ejemplo concreto de sistema realimentado que resulte especial-mente llamativo. Para ello voy a recurrir a un sencillo artilugio conocido como
14

Figura 9: P�endulo invertido rotatorio.
Planta
Controlador
u x
Figura 10: Estructura de realimentaci�on de un p�endulo invertido rotatorio.
15

Figura 11: Balanceo y estabilizaci�on del p�endulo invertido rotatorio.
p�endulo invertido, que consiste en un motor, de eje vertical del que es solidarioun brazo que, por tanto, gira con el motor (en la �gura 9 el giro del brazose mide por el �angulo �). Del extremo del brazo cuelga libremente un p�endulo(cuya posici�on, en la �gura 9, se mide por el �angulo �) que oscilar�a tras cualquiermovimiento del motor. La posici�on natural del p�endulo, cuando el motor est�aparado, es la de pender hacia abajo (� = �). El objetivo que se pretende al-canzar es que este p�endulo se mantenga erecto en el extremo del brazo (� = 0).Se trata de un comportamiento arti�cial que puede interpretarse diciendo quese trata de invertir la acci�on de la gravedad que en lugar de tirar del p�endulohacia abajo, lo succione hacia arriba.
Para conseguir este objetivo se requiere medir, mediante un sensor adecuado,el �angulo que forma el p�endulo con la vertical y, a partir de esta informaci�on,decidir qu�e actuaci�on debe tener el motor para lograr el objetivo propuesto.Se trata, una vez m�as, de una sencilla estructura de realimentaci�on mediantela cual a partir de una medida, el �angulo del p�endulo con la posici�on vertical,se procesa esa informaci�on en un ordenador, mediante un algoritmo adecuado(cuya concepci�on constituye una de las aportaciones b�asicas del ingeniero decontrol) se decide la actuaci�on conveniente, que se lleva a cabo mediante elmotor que, en este caso, es el actuador sobre el sistema a controlar; esto es, elp�endulo.
El inter�es de este proceso radica en que se trata de un sistema subactuado
16

en el cual el actuador, el motor, act�ua sobre el brazo del que pende el p�endulo,y no sobre el p�endulo cuya posici�on se trata precisamente de controlar. Estoda lugar a interesantes problemas de estabilidad que han hecho de este sistemauno de los problemas de control que ha recibido una considerable atenci�on enla literatura en los �ultimos a~nos. Aqu��, sin embargo, como es natural, no nosocuparemos de esas sutilezas. S�� conviene, sin embargo, considerar dos aspectosde este problema de control.
Por una parte, el sistema resulta aparentemente sencillo desde un punto devista mec�anico, y no es dif��cil obtener las ecuaciones matem�aticas que gobier-nan su comportamiento. Sin embargo, tras esta aparente simplicidad formalse esconde una considerable di�cultad. Para llevar el p�endulo de la posici�oncolgante a la superior se requiere inyectarle la energ��a que corresponde a la dife-rencia entre las energ��as potenciales correspondientes a esas dos posiciones. Esteproblema es aparentemente sencillo y se conoce su soluci�on. Por otra parte, unavez el p�endulo se encuentra cercano a la posici�on deseada, el problema que seplantea es an�alogo al de el malabarista que trata de mantener un palo en lapunta del dedo. Este problema tambi�en se sabe resolver razonablemente bien.Lo que se hace en los p�endulos invertidos actualmente en funcionamiento esresolver estos dos problemas separadamente. En primer lugar, se aplica la es-trategia de inyecci�on de energ��a para llevar el p�endulo a una posici�on cercana ala deseada y, en segundo lugar, se conmuta a otra estrategia de control (la delmalabarista) que permite estabilizar el sistema en esta posici�on. Es notable, sinembargo, que no se haya encontrado una ley de control �unica que realice estasdos funciones.
En este sentido el p�endulo invertido es un ejemplo paradigm�atico de unproblema de ingenier��a. Un problema ante el cual el ingeniero, para alcanzarel objetivo propuesto, recurre a una s��ntesis entre las soluciones a los diferentessubproblemas en los que se descompone un proceso complejo. Estas distintassoluciones comprenden desde aspectos de concepci�on (como son, en este caso,las dos estrategias que hay que combinar) hasta cuestiones de implantaci�on (queen nuestro caso se traducen en la elecci�on de sensores adecuados y en un sistemainform�atico {un DSP{ adecuado para procesar la informaci�on correspondiente,ver �gura 12). La labor del ingeniero consiste en integrar creativamente (esdecir, con una libertad s�olo sometida al logro del objetivo deseado) todos estoselementos y plasmarlos en una soluci�on concreta y e�ciente al problema pro-puesto. Es notable observar que, en ese sentido, el p�endulo invertido, siendoun sistema relativamente simple, aporta un ejemplo de m�aquinas mucho m�ascomplejas, como pueden ser un robot o un autom�ovil.
Por otra parte, el otro aspecto del comportamiento del p�endulo invertidosobre el que conviene prestar atenci�on es el que se deriva de la observaci�on de sucomportamiento. El p�endulo invertido, en funcionamiento, parece empe~narse
17

Figura 12: Realizaci�on inform�atica del sistema de control del p�endulo invertido.
obstinadamente en mantenerse en la posici�on arti�cial que ha motivado su con-cepci�on. Si mediante una perturbaci�on adecuada (el golpe con una varilla, osencillamente la aplicaci�on de un par con la mano) se saca al p�endulo de laposici�on deseada, este reacciona restituy�endola de forma aut�onoma. El p�endulose comporta de modo que la \causa �nal" (por usar la clasi�caci�on de causas deArist�oteles) es la que parece presidir su comportamiento. La constataci�on de estehecho obliga a replantear algunos supuestos com�unmente aceptados con relaci�onal comportamiento de las m�aquinas. A la conducta del p�endulo cabe darle unainterpretaci�on teleol�ogica. Las m�aquinas parec��an constituir la realizaci�on ejem-plar de la causalidad e�ciente aristot�elica. No obstante, vemos como el p�enduloinvertido (y en general las m�aquinas dotadas de realimentaci�on) presentan uncomportamiento que parece estar regido por la causa �nal (el objetivo pro-puesto). Sin embargo, y esto es lo notable, de estas m�aquinas tambi�en poseemosuna descripci�on en t�erminos de causalidad e�ciente. As�� pues lo teleol�ogico, quenormalmente es desde~nado como poco cient���co, es susceptible, sin embargo,de una interpretaci�on al gusto precisamente de aquellos que, por otra parte, lodesde~nan. Comp�arese esto con lo dicho anteriormente con relaci�on a la emer-gente teor��a de sistemas y se comprender�a la riqueza del campo de re exi�onque aporta esta rama de la ingenier��a en la que m�aquinas e informaci�on seentremezclan de forma tan sugerente.
Cap��tulo aparte merece el apartado de las responsabilidades �eticas de lasdecisiones que toman las m�aquinas. El proyectista de una m�aquina autom�atica,como hemos visto, no s�olo �ja los objetivos sino que establece los mecanismoscon los que los alcanzar�a. >De qui�en es la responsabilidad de las decisiones quetoma la m�aquina? Porque, como es sabido, la �etica se ocupa de sentar las bases apartir de las cuales establecer las responsabilidades que derivan de las decisiones
18

tomadas. Este es un �ambito de re exi�on para el campo poco explorado de la�etica de los ingenieros.
As�� pues, y con estas palabras voy a terminar, hemos visto como la infor-maci�on se ha situado en el n�ucleo de las m�aquinas con las que convivimos. Quepara la concepci�on de las m�aquinas en las que la informaci�on juega un papelesencial se ha tenido que desarrollar una nueva rama de la ingenier��a que es elcontrol autom�atico. Este nueva rama tiene un car�acter transversal, y afecta atodas las tradicionales, es decir a la ingenier��a el�ectrica, mec�anica, qu��mica, entreotras. En todas ellas se emplea la informaci�on y la estructura de realimentaci�onpara gobernar autonomamente el comportamiento de las m�aquinas. Hemos vistotambi�en que el concepto de relimentaci�on no se limita a la ingenier��a de control,sino que ha trascendido al estricto mundo de la t�ecnica y hoy lo empleamos paracomprender y explicar procesos complejos que tienen lugar tanto en los seresvivos como en los sistemas sociales. Con el control autom�atico nos encontramoscon una disciplina emergente que, como sucedi�o con la termodin�amica hace dossiglos, antecede en sus conceptos y en sus m�etodos a la ciencia establecida. Con-stituye una muestra palpable de la autonom��a del mundo de la t�ecnica y, portanto, de la ingenier��a, as�� como de sus m�as conspicuas posibilidades innovado-ras y creativas, tanto en lo que respecta a conseguir artefactos que enriquezcannuestra vida, como a elaborar conceptos que nos ayuden a entender mejor elmundo en el que vivimos.
No me queda m�as que agradecerles vivamente su atenci�on.
19




























![[Sayyid Mahmud Syukri Al-Alusi] Al-Quran & Ilmu Astronomi.pdf](https://img.dokumen.tips/doc/110x75/577c7e061a28abe054a066e6/sayyid-mahmud-syukri-al-alusi-al-quran-ilmu-astronomipdf.jpg)
