Embed Size (px)
Citation preview
OffOff--line line RobustificationRobustification of Multivariableof MultivariableModel Predictive ControlModel Predictive Control
Cristina StoicaPedro Rodríguez-Ayerbe
Didier Dumur
Department of Automatic Control, SUPELEC Gif-sur-Yvette, France
GT CPNL, 31GT CPNL, 31--0101--20082008

31/01/2008 2
Introduction
Multivariable MPC
Robustness using the Youla parameter
Robustified MIMO MPCRobust stability (RS)Nominal performance
Application to a stirred tank reactor
Conclusions
ContentContent
Introduction
31/01/2008 3
IntroductionIntroduction
Off-line state-space methodology for enhancing the robustness of multivariable MPC
Initial stabilizing MIMO Model Predictive Controller
Robustification of this initial controller by convex optimization of a multivariable Youla parameter
Off-line methodology to improve robust stability under unstructured uncertainties, while respecting nominal performance specifications LMI tools
Starting point
Means
Goal
31/01/2008 4
ContentContent
IntroductionMultivariable MPC
Model descriptionCost functionPrediction equationControl law synthesis
Robustness using the Youla parameterRobustified MIMO MPCApplication to a stirred tank reactorConclusions

31/01/2008 5
Model description (MIMO system )with
Steady-state errors cancellation
Predicted output vector
Observer
∑ ∑−
=
+
=
−−
⎥⎥⎦
⎤
⎢⎢⎣
⎡+Δ+−+=+
1
0
)(
0
1 )()1()(ˆ)(ˆi
j
jk
j
l
jii lkkkik
4444 34444 21u
uuBACxACy
MultivariableMultivariable MPC MPC
)](ˆ)([)()(ˆ)1(ˆ kkkkk eeeeee xCyKuBxAx −+Δ+=+
)()1()( kkk uuu Δ+−=
⎩⎨⎧
=+=+
)()()()()1(
kkkkk
xCyuBxAx
pm×npmnnn ××× ∈∈∈ RCRBRA ,,
⎩⎨⎧
=Δ+=+
)()()()()1(
kkkkk
ee
eeee
xCyuBxAx
⎥⎦
⎤⎢⎣
⎡−
=)1(
)()(
kk
ke ux
xExtended state-space

31/01/2008 6
MultivariableMultivariable MPCMPC
Quadratic objective function minimization
withObjective function in the matrix formalism
with
∑∑−
==
+Δ++−+=1
0
2)(~
2)(~ )()()(ˆ
2
1
u
JJ
N
ii
N
Niir ikikikJ RQ uyy
2222 )()()()()()(JJJJ
kkkkkkJ r RQRQ UΘUΦUYY Δ+−Δ=Δ+−= Δ
)1()(ˆ)()()()1()(ˆ)(
−−−=Δ+−+= Δ
kkkkkkkk
r uΦxΨYΘUΦuΦxΨY
uNiik ≥∀=+Δ ,0)(u
Output prediction horizons Control horizonWeightings
)(kUΔ
0)(=
Δ∂∂
kJU
Future control actions Extended state-space and future setpoints

31/01/2008 7
MultivariableMultivariable MPCMPC
Future control laws sequence
with
where
The first component of each future control sequence
with
)()()( T1T kk JJJ ΘQΦΦQΦRU Δ−
ΔΔ+=Δ
∑=
−=i
j
jii
0
BACΣ
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
−−−−−
−
Δ
−
−
uNNNNNNN
N
N
N
N
N
212122
1
2
1
2
1
11
01
1
1 00,,
ΣΣΣΣ
ΣΣΦ
Σ
ΣΦ
CA
CAΨ
LL
MOMMLM
LL
MM
)()( kk Θμu =Δ
[ ] JJJNmmm uQΦΦQΦR0Iμ T1T
)1(, )( Δ−
ΔΔ− +=
Receding horizon principle

31/01/2008 8
MultivariableMultivariable MPCMPC
Block diagram of MIMO MPC)(ˆ)()( 2 kNkk err xLyFu −+=Δ
[ ] [ ]μΦμΨLLL == 21with
)(ky⎥⎦
⎤⎢⎣
⎡0CBA)( 2Nkr +y
)(kuΔ
rF)(ku∫
)(ˆ ky
)(ˆ kexObserver
+−
[ ]⎥⎦
⎤⎢⎣
⎡ −0IKBKCA eee
eC
L
31/01/2008 9
ContentContent
IntroductionMultivariable MPCRobustness using the Youla parameter
Initial stabilizing control lawRobust stability under frequency constraintsNominal performance specifications
Robustified MIMO MPCApplication to a stirred tank reactorConclusions

31/01/2008 10
RobustnessRobustness usingusing the the YoulaYoula parameterparameter
Initial stabilizing controller
Set of stabilizing controllers
Affine dependence in
0K
Youlaparametrization
sK
Q
y′u′
sK
MIMO System
0K
w z
yu
w z
Q
⎟⎟⎠
⎞⎜⎜⎝
⎛0TTT
21
1211
y′u′
211211 QTTTTzw +=
Q
?=Q
∞ℜ∈ HQ
Convex specifications in closed-loop

31/01/2008 11
),,,( clclclcl DCBA∞H γ
0/0TT
T1
T
11
T11 pf
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−
−−
=∃
−
IDC0DI0BC0XA0BAX
XX
γγclcl
clcl
clcl
clcl
Robustification under unstructured uncertainties
TheoremA discrete-time system is stable and admits a norm lower than if and only if
New optimization problem
RobustnessRobustness usingusing the the YoulaYoula parameterparameter
w z
uΔ
zwT
uΔ
∞ℜ∈ ∞zwQT
Hmin Small gain theorem
Transformation
into LMI1γ1
minLMI

31/01/2008 12
Nominal performance specifications as output time-domain templates for disturbances rejection
RobustnessRobustness usingusing the the YoulaYoula parameterparameter
tNkkkkk ≤≤∀≤≤ 0/),()()( maxmin yyy
Time
Time-domain template for disturbance rejection
Tim
e re
spon
se
Transformation
into LMI2
γ21,
minLMILMI
31/01/2008 13
ContentContent
IntroductionMultivariable MPCRobustness using the Youla parameterRobustified MIMO MPC
Initial stabilizing control lawRobust stability under frequency constraintsNominal performance specifications
Application to a stirred tank reactorConclusions

31/01/2008 14
RobustifiedRobustified MIMO MPCMIMO MPC
⎥⎦
⎤⎢⎣
⎡
DCBA
)( 2Nkr +y )(ky)(kuΔ
rF )(ku∫
)(kd
)(kuz
uΔ
⎥⎦
⎤⎢⎣
⎡0CBA
)(kb
[ ]⎥⎦
⎤⎢⎣
⎡0CIBA
e
ee )(ˆ ky
K
)(ˆ kxeL
)(ky′)(ku′
uW
Observer
+−
+
−
+++
+−
Initial stabilizing controlMIMO MPC
Robust stabilityAdditive uncertainties
Nominal performanceTime-domain templates for disturbances rejection
∞∞= uubbz WTT
uminmin
uΔ
Block diagram of MIMO MPC with the parameterQ
)()( kk yd →
31/01/2008 15
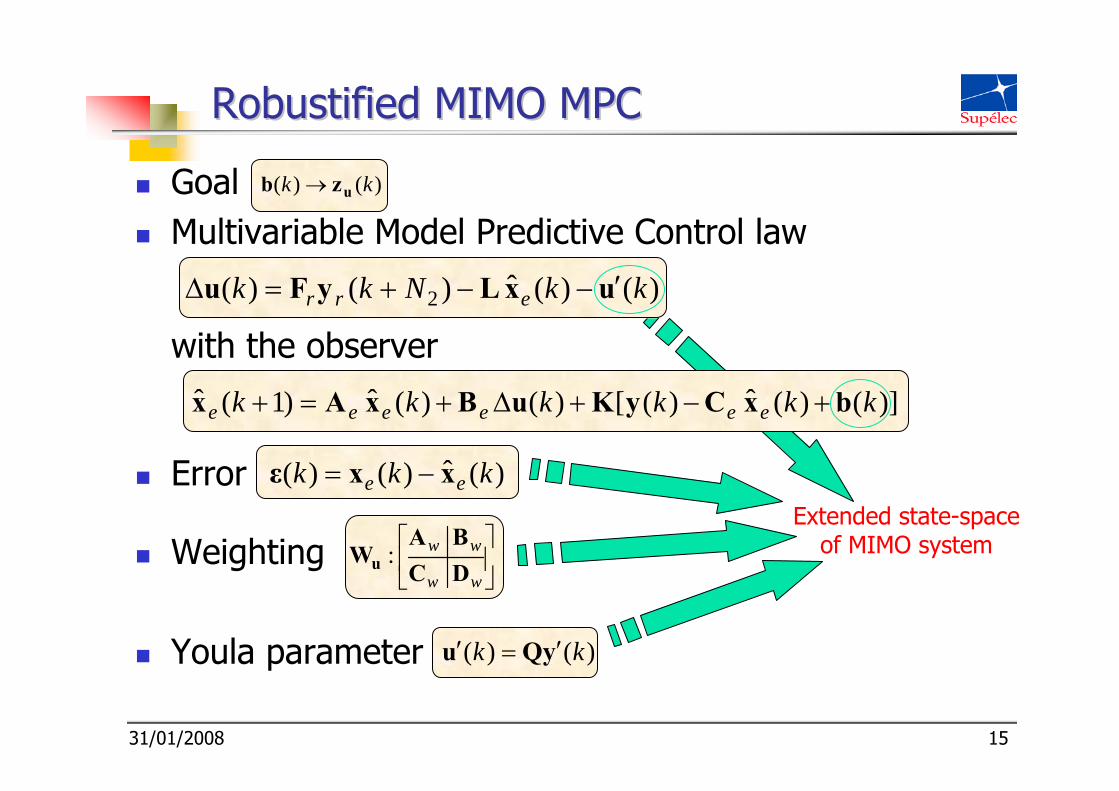
)]()(ˆ)([)()(ˆ)1(ˆ kkkkkk eeeeee bxCyKuBxAx +−+Δ+=+
RobustifiedRobustified MIMO MPCMIMO MPC
GoalMultivariable Model Predictive Control law
with the observer
Error
Weighting
Youla parameter
)(ˆ)()( kkk ee xxε −=
⎥⎦
⎤⎢⎣
⎡
ww
ww
DCBA
Wu :Extended state-space
of MIMO system
)()( kk yQu ′=′
)()( kk uzb →
)()(ˆ)()( 2 kkNkk err uxLyFu ′−−+=Δ

31/01/2008 16
Aim: find the Youla parameter which minimizes the norm convex optimization problemSub-optimal solution
for each pair a polynomial or a FIR filter
State-space representation
RobustifiedRobustified MIMO MPCMIMO MPC
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=⎥⎦
⎤⎢⎣
⎡
mpQ
mQ
mpQ
mQ
pQQ
pQQ
dd
dd
LL
MOMMOM
LL
OO
11
111111
cc
ccb0a0
0b0a
DCBA
[ ] ijijQ
ijn
ijijQ
nQ
nn
nQ qdqq
QQQQ
Q01
1,11,11
1,1 ,,1
,0
==⎥⎥⎦
⎤
⎢⎢⎣
⎡=
⎥⎥⎦
⎤
⎢⎢⎣
⎡=
−−−
−Lc0b0I
0a
pjmiqqQQn
l
lijl
ij ,1,,1,0
===∑=
−
variable
fixed
∞bzuT∞ℜ∈ HQ
),( ji ijQ
order of Youla parameter
unknown parameters

31/01/2008 17
Closed-loop system in state-space formulation
Maximization of robust stability under :
RobustifiedRobustified MIMO MPCMIMO MPC
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−−−
−−−−
=⎥⎦
⎤⎢⎣
⎡′′′
QwQweQw
QQeQ
QuQueQu
clcl
clcl
DDCDCDDCCBACB0K0A0DBCBCDBAA
DCBA
21
2
31 111
)()( kk uzb →
∞bzuTminuΔγ
1minLMI
0
*************
*********
*****
*
TT
TTT1
T1222
TT2
T1
T111211
T111
22T1222222
T1222
121112122111211
121112121312211111111 111
p
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−
−−
−+−−−
+−+−
+−+−−−+−−−−+−−− ′′′
IDDIDCCS0TDDCCCS0TT
CR000R0BTKTATCBTAT0T0BTKTATCBTAT0TT0BSKSDBCBASSACDBACBSASSARA00R
γγ wQ
wQ
wTQ
Te
QQeQ
QQeQ
QQuQuQeQueQ
1LMI

31/01/2008 18
RobustifiedRobustified MIMO MPCMIMO MPC
Nominal performance for disturbances rejectionTransfer for
Time domain templates
⎪⎩
⎪⎨
⎧
′=′
⎥⎦
⎤⎢⎣
⎡′⎥
⎥⎦
⎤
⎢⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡′
yQu
ud
0TTT
yy
yd
ydyd
21
1211
)()()( 211211 kkk dQTTdTyydydyd
+=
Affine in Q)()( kk yd → tNk ,0=
)()()( maxmin kkk yyy ≤≤
0)()()( max211211 ≤−+ kkk ydQTTdTydydyd
0)()()( min211211 ≤++ kkk ydQTTdTydydyd
2LMIManipulations
γ21,
minLMILMI

31/01/2008 19
ContentContent
IntroductionMultivariable MPCRobustness using the Youla parameterRobustified MIMO MPCApplication to a stirred tank reactor
System description & MPC parametersRobust stability under frequency constraintsNominal performance specifications
Decoupled system(2 templates)Coupled system(4 templates)
Conclusions

31/01/2008 20
Simplified MIMO model of reactor
Discretized for
MPC parameters
Weightings
Application to a stirred tank reactorApplication to a stirred tank reactor
⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
++
++=⎥⎦
⎤⎢⎣
⎡)()(
4.012
5.011
3.015
7.011
)()(
2
1
2
1
sUsU
ss
sssYsY
Feed flow rate
Coolant flow
Reactor temperature
Effluent concentration1y
1u
2u ∞
2y
min03.0=eT
⎥⎦
⎤⎢⎣
⎡0CBA
2,2,4 === pmn
State-space representation
1
21
12
~,05.0~2,3,1
+−==
===
NNJNJ
u
u
NNN
IQIR
3.0/)7.01( 12
−−= qIWu ⎥⎦
⎤⎢⎣
⎡
ww
ww
DCBA

31/01/2008 21
Application to a stirred tank reactorApplication to a stirred tank reactor
MPC0 : initial MPC controller (before robustification)
MPC1 : robustnessunder frequencyconstraints only
MIMO System
1Q
y′u′0MPC
yu
uΔ
buz
MPC2 : robustness underfrequency and time-domainconstraints – 2 templates
Système MIMO
MIMO
System
2Q
y′u′0MPC
1d 1y
yu
uΔ
2d 2y
MPC3 : robustness underfrequency and time-domainconstraints – 4 templates
3Q
y′u′
MIMO
System
0MPC
yu
uΔ
1d 1y2d 2y
31/01/2008 22
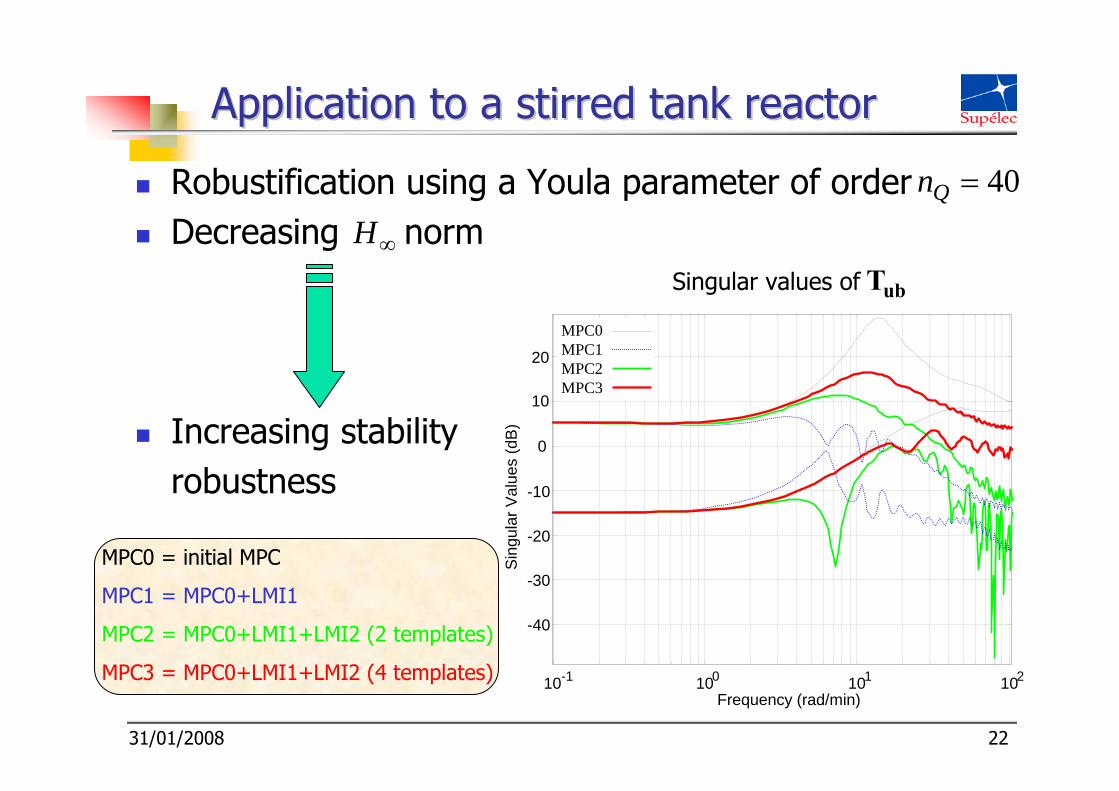
Application to a stirred tank reactorApplication to a stirred tank reactor
Robustification using a Youla parameter of orderDecreasing norm
Increasing stability robustness
40=Qn
110-1 100 10 102
-40
-30
-20
-10
0
10
20
Sing
ular
Valu
es(d
B)
MPC0MPC1MPC2MPC3
Frequency (rad/min)
∞H
MPC0 = initial MPC
MPC1 = MPC0+LMI1
MPC2 = MPC0+LMI1+LMI2 (2 templates)
MPC3 = MPC0+LMI1+LMI2 (4 templates)
Singular values of ubT
31/01/2008 23
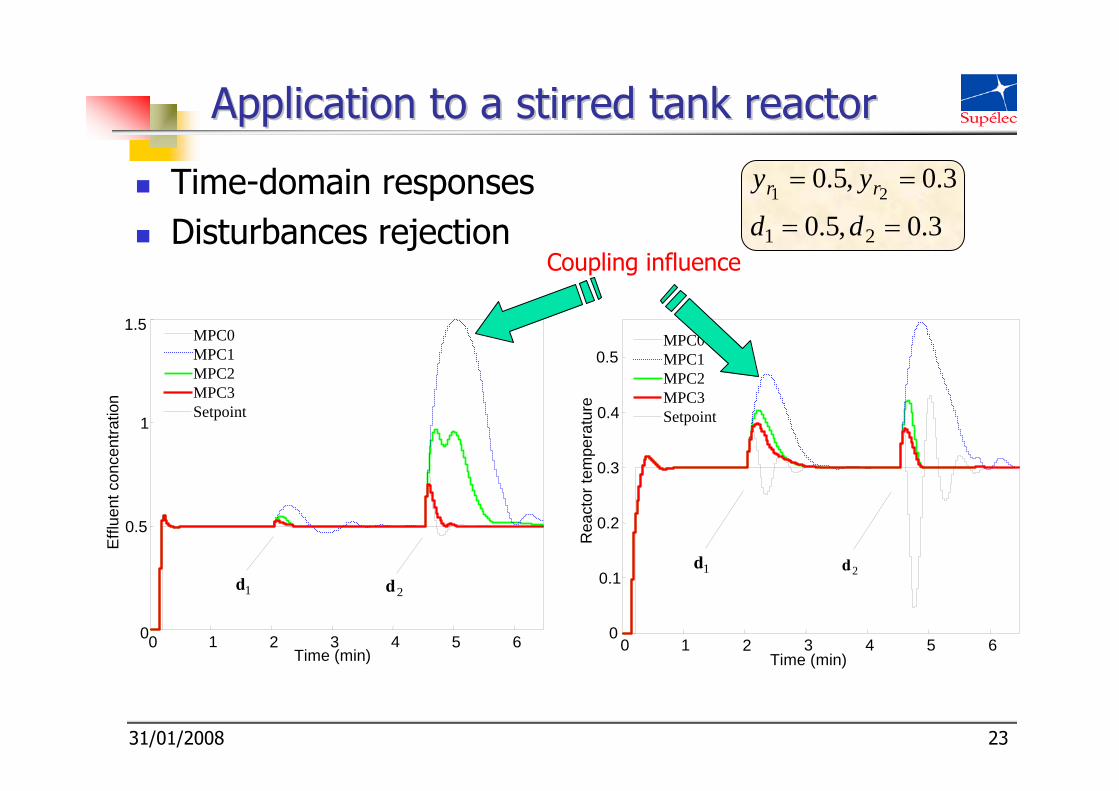
Application to a stirred tank reactorApplication to a stirred tank reactor
Time-domain responsesDisturbances rejection 3.0,5.0
3.0,5.0
21
21
==
==
dd
yy rr
0 1 2 3 4 5 60
0.5
1
1.5
Effl
uent
con
cent
ratio
n
MPC0MPC1MPC2MPC3Setpoint
Time (min)
1d 2d1d 2d
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
Rea
ctor
tem
pera
ture
MPC0MPC1MPC2MPC3Setpoint
Time (min)
Coupling influence

31/01/2008 24
Application to a stirred tank reactorApplication to a stirred tank reactor
Control signals
0 1 2 3 4 5 6
-1.5
-1
-0.5
0
0.5
1
Feed
flow
rate
MPC0MPC1MPC2MPC3
Time (min)
1d 2d
1d 2d
0 1 2 3 4 5 6-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Time (min)
Coo
lant
flow
MPC0MPC1MPC2MPC3
Coupling influence

31/01/2008 25
Application to a stirred tank reactorApplication to a stirred tank reactor
Time-domain templates for disturbances rejection
11 yd →
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.02
0
0.02
0.04
0.06
0.08
0.1
Effl
uent
con
cent
ratio
n
Time (min)
MPC0MPC1MPC2MPC3
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2-0.25-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Rea
ctor
tem
pera
ture
Time (min)
MPC0MPC1MPC2MPC3
22 yd →

31/01/2008 26
Application to a stirred tank reactorApplication to a stirred tank reactor
Time-domain templates for disturbances rejection
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.91
Effl
uent
con
cent
ratio
n
Time (min)
MPC0MPC1MPC2MPC3
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Rea
ctor
tem
pera
ture
Time (min)
MPC0MPC1MPC2MPC3
-0.04
12 yd → 21 yd →

31/01/2008 27
Validation of robust stability under a neglected dynamics of
corresponding to the transfer
Without robustification – unstable After robustification – stable
Application to a stirred tank reactorApplication to a stirred tank reactor
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
Time (min)
Tim
e re
spon
ses
MPC0MPC3Setpoint
)07.01)(7.01(1
ss ++
Coupling influence
1u
11 yu →
31/01/2008 28
ContentContent
IntroductionMultivariable MPCRobustness using the Youla parameterRobustified MIMO MPCApplication to a stirred tank reactorConclusions

31/01/2008 29
Conclusions & Conclusions & currentcurrent workwork
Complete off-line methodology which enables robustification of an initial MIMO MPCInput/output behaviour remains unchangedImproved robustness towards unstructured uncertainties through a convex optimization problem (LMI techniques)Use of four time-domain templates to manage the coupling effect in an efficient wayCompromise between robust stability and nominal performance specificationsReduced computational effort due to state-space representation
31/01/2008 30
Conclusions & Conclusions & currentcurrent workwork
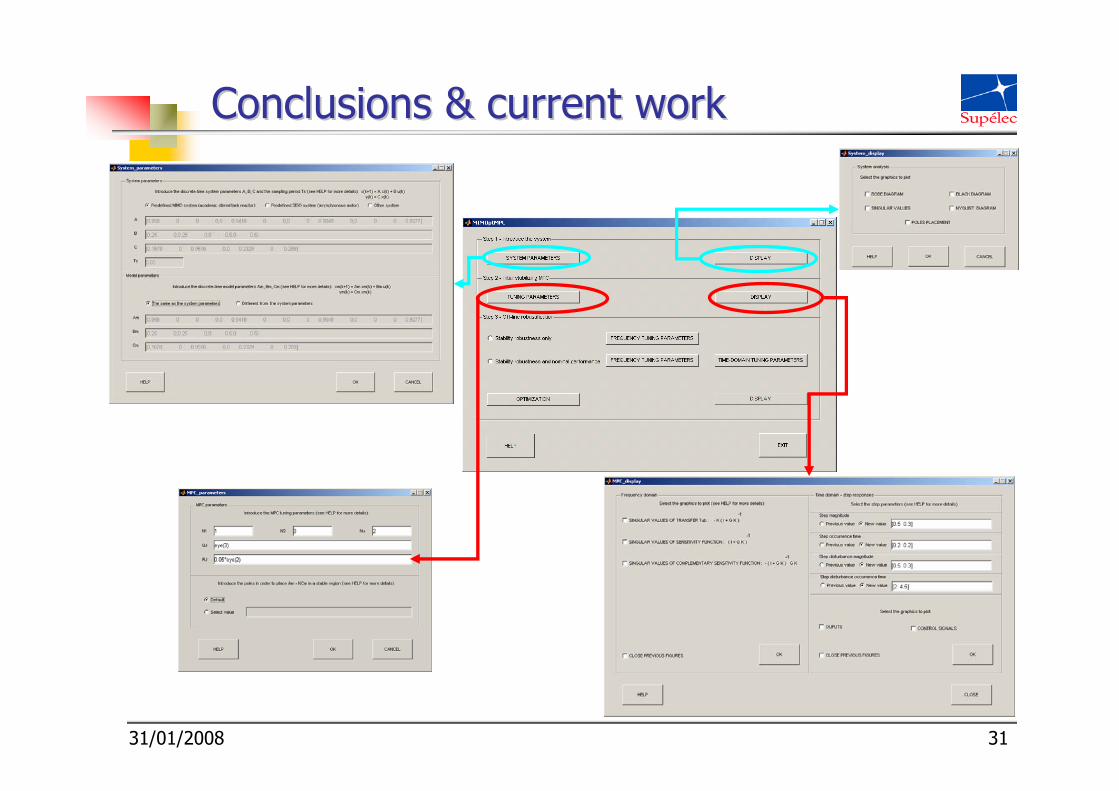
Developing a new MATLAB toolbox (MIMOptMPC) based on the theoretical feature of this off-line robustification procedure
An user friendly and easily extensible toolbox Choice of tuning parameters and robustification options
Visualization tools enabling performances evaluation
A helpful solution for non-specialist users as well as researchers working in the field of robust MPC
31/01/2008 31
Conclusions & Conclusions & currentcurrent workwork

31/01/2008 32
Conclusions & current workConclusions & current work
Time
y
maxupL
minupL
mindownL
maxdownL
stTN
stTn





























