Embed Size (px)
Citation preview

1
ПРОГРАММА
1. Введение в курс
Роль автоматического управления в современной технике и про-
изводстве. Применение систем автоматического управления (САУ) в
авиационной технике – объективная необходимость, вызванная чрез-
мерным усложнением и интенсификацией процессов управления ле-
тательными и космическими аппаратами.
Изучение курса “Теория автоматического управления” по пред-
ложенной программе в полном объеме позволит будущему инженеру
по специальности 190300 успешно решать задачи автоматического
управления отдельными системами летательного аппарата и лета-
тельным аппаратом в целом [1. С. 5–12].
2. Принцип действия и общие свойства системавтоматического управления.
Основные понятия и определения
Классификация автоматических систем по принципу действия.
Замкнутые и разомкнутые автоматические системы. Общее опреде-
ление системы управления. Системы стабилизации и их особеннос-
ти. Системы программного, экстремального и оптимального управ-
ления. Классификация внешних воздействий. Управление по откло-
нению. Управление по возмущающему воздействию. Комбинирован-
ные системы управления. Системы прерывного и непрерывного дей-
ствия. Импульсные, дискретные системы и их особенности.
Основные понятия, связанные с процессом управления. Направ-
ление воздействий в системах управления и причины, вызывающие
отклонение регулируемой величины. Понятие закона регулирования.
Дифференциальное уравнение в общем виде, описывающее сис-
тему управления. Классификация автоматических систем по свой-
ствам в установившемся режиме. Астатические системы, их особен-
ности, примеры. Статические системы, их особенности и примеры.

2
Переходный процесс. Дифференциальные уравнения переходного
процесса в отклонениях. Понятие об устойчивости и качестве пере-
ходного процесса системы [1. С. 13–37].
Методические указания
Существующие автоматические системы весьма многообразны по
своим признакам. При проектированиии автоматической системы важ-
но знать особенности различных видов автоматических систем, их воз-
можности и ожидаемое качество регулирования. Только при этом мож-
но правильно выбрать рациональную схему системы и, исходя из задан-
ных требований качества, подобрать оптимальные значения парамет-
ров системы. Поэтому при изучении этого раздела нужно усвоить ос-
новные понятия и определения теории автоматического управления и
особое внимание уделить анализу достоинств и недостатков различных
типов систем.
Для наглядности и более глубокого усвоения материала следует каж-
дую систему представлять структурной схемой и анализировать ее осо-
бенности, которые должны удовлетворять поставленным задачам уп-
равления.
Вопросы для самоконтроля
1. Дайте определение САУ и назовите ее основные виды.
2. Поясните различие между замкнутыми и разомкнутыми система-
ми автоматического управления.
3. В чем особенности функционирования систем стабилизации, сле-
дящих систем, систем программного управления и систем экстремаль-
ного управления, их сходство и различие?
4. Из каких элементов состоит регулятор? Поясните на примере общую
стуктурную схему САУ и объясните роль каждого элемента в схеме.
5. В чем смысл управления по отклонению и по возмущающему воз-
действию? В каких случаях целесообразно применять комбинирован-
ное управление ?
6. Поясните на примерах принципы управления, применяемые в САУ.
Приведите определение закона управления.
7. Как можно построить систему прямого действия ?
8. В чем заключается различие статического и астатического управ-
ления?

3
9. Назовите достоинства и недостатки непрерывных, релейных, дис-
кретных и импульсных систем.
10. Что следует понимать под качеством переходного процесса в САУ?
3. Дифференциальные уравнения ипередаточные функции САУ
Общий метод составления и линеаризации дифференциальных урав-
нений САУ. Геометрический смысл линеаризации. Главные факторы,
влияющие на ошибки при линеаризации дифференциальных уравне-
ний.
Операторная форма записи дифференциальных уравнений. Понятие
передаточной функции как основной динамической характеристики
звеньев и всей САУ в целом.
Составление уравнений системы автоматического управления. По-
лучение единого дифференциального уравнения и передаточной функ-
ции разомкнутой системы управления.
Составление единого дифференциального уравнения замкнутой си-
стемы управления. Определение передаточной функции замкнутой си-
стемы по управляющему и возмущающему воздействиям при извест-
ной передаточной функции разомкнутой системы. Вывод характерис-
тического уравнения замкнутой и разомкнутой систем.
Типы соединения динамических звеньев и виды передаточных фун-
кций при этом. Эквивалентные структурные преобразования. Основ-
ные правила преобразования структурных схем [1. С. 33–71].
Методические указания
Анализ работы автоматической системы или подбор ее параметров про-
водится по единому дифференциальному уравнению динамики системы.
Поэтому специалист, проектирующий САУ, должен уметь составлять диф-
ференциальные уравнения ее звеньев, допустимо упростить эти уравне-
ния и получить из них единое дифференциальное уравнение.
Если же исследования динамики САУ проводится частотными мето-
дами, то единого дифференциального уравнения автоматической сис-
темы явно недостаточно. Для проведения исследований в частотной
области необходимо получить передаточные функции отдельных дина-
мических звеньев и системы в целом.

4
В процессе изучения данного раздела следует обратить особое вни-
мание на обоснование возможности линеариазации уравнений, посколь-
ку в линеаризации может таиться не только качественная ошибка ана-
лиза динамики системы. Материалы раздела рекомендуется изучать на
конкретном примере. Для закрепления знаний и приобретения необхо-
димых навыков следует потренироваться в составлении уравнений и
передаточных функций нескольких видов систем.
Метод структурных преобразований позволяет существенно упро-
щать задачу исследования системы. Изучение правил эквивалентных
структурных преобразований следует сопровождать решением соответ-
ствующих задач.
Вопросы для самопроверки
1. В чем состоит смысл линеаризации и ее геометрическое толкова
вание?
2. Какие исходные предположения лежат в основе линеаризации
уравнений САУ?
3. Возможно ли по виду характеристик элемента системы или по
виду уравнения определить возможность их линеаризации? Укажите
главные факторы, влияющие на ошибки при линеаризации.
4. Назовите случаи и причины, когда линеаризация недопустима.
5. Как определить коэффициенты линеаризованного уравнения по
характеристикам элемента и по его аналитическим выражениям?
6. Укажите порядок составления и линеаризации уравнений звеньев
системы.
7. Дайте определение структурной схемы САУ и что она характеризует?
8. Поясните основные обозначения, применяемые в структурных
схемах.
9. Какие способы соединений звеньев встречаются в структурных
схемах и как определяется эквивалентная передаточная функция отдель-
ных участков цепи и системы?
4. Элементы систем автоматического управления
Назначение элементов и устройств САУ, требования, предъявляемые
к ним. Принцип действия, статические и динамические характеристи-
ки измерительно-преобразовательных элементов: потенциометрических,
индуктивных, емкостных. фотоэлектрических, пьезоэлектрических, тер-

5
мометров сопротивлений. Принцип действия и статические характери-
стики усилительно-преобразовательных устройств. Приницип действия,
статические и динамические характеристики исполнительных элемен-
тов [9. С. 364–427].
Вопросы для самопроверки
1. Назначение и принцип действия измерительно-преобразователь-
ных, усилительно-преобразовательных, исполнительных элементов.
2. Почему величина срабатывания релейных элементов больше ве-
личины отпускания?
3. Почему к элементам САУ предъявляются требования линейности
статических характеристик и малого времени длительности переходно-
го процесса?
5. Устойчивость линейных систем автоматического управления
Понятие устойчивости. Требования к корням характеристического
уравнения. Необходимое и достаточное условия устойчивости замкну-
той системы. Теоремы Ляпунова, обосновывающие линейную теорию
автоматического управления.
Критерии устойчивости и их применение к расчету систем автома-
тического управления. Критерий устойчивости Вышнеградского. Про-
тиворечие статической точности и устойчивости. Критерий устойчи-
вости Рауса. Пределы практического применения критерия устойчиво-
сти Рауса. Критерий Гурвица. Примеры использования критериев Гур-
вица, Рауса и критерия Вышнеградского при анализе устойчивости и
синтезе САУ.
Графоаналитический критерий устойчивости Михайлова. Кривая
Михайлова и ее связь с корнями характеристического уравнения. Свой-
ства кривой Михайлова. Первая и вторая формулировка критерия ус-
тойчивости Михайлова. Граница устойчивости по критерию Михайло-
ва. Практические достоинства критерия устойчивости Михайлова и его
применение при расчете системы.
Частотные методы в управлении и частотный критерий устойчи-
вости. Суть частотных методов и их главное достоинство. Понятие
об амплитудно-фазовых частотных характеристиках Свойства амп-
литудно-фазовых частотных характеристик. Амплитудно-фазовые
характеристики элементарных звеньев и одноконтурной разомкну-
той системы.

6
Способы построения амплитудно-фазовой характеристики разомк-
нутой системы. Частотный критерий устойчивости Найквиса для замк-
нутых систем в случаях:
- разомкнутая система устойчива;
- разомкнутая система неустойчива.
Общая формулировка частотного критерия устойчивости замкнутых
систем, граница устойчивости по частотному критерию.
Понятие запаса устойчивости.
Анализ устойчивости методом логарифмических частотных характе-
ристик. Понятие о логарифмических частотных характеристиках. Лога-
рифмические частотные характеристики типовых звеньев. Построение
логарифмических частотных характеристик для разомкнутой системы.
Примеры построения.
Формулировка и примеры частотного критерия устойчивости при-
менительно к логарифмическим частотным характеристикам. Запас ус-
тойчивости по амплитуде и фазе [1. С. 114–154].
Методические указания
Данный раздел курса, в котором рассматриваются вопросы анализа
линейных систем управления, вместе с четвертым разделом составляют
основную часть курса “Теория автоматического управления”.
В этой части курса студенты должны усвоить математический ап-
парат в виде критериев устойчивости, который предназначен для
анализа устойчивости и выделения области устойчивости в плоско-
сти искомых параметров проектируемой системы.
Все критерии устойчивости имеют единое математическое содер-
жание, но различаются по форме. Поэтому целесообразность приме-
нения того или иного критерия определяется конкретным видом за-
дачи.
При изучении материала важно обратить внимание на достоин-
ства и недостатки каждого из критериев и запомнить, в каких случа-
ях каким из них удобнее пользоваться.
Особенно тщательной проработки требуют частотные методы ис-
следования в логарифмическом варианте. Метод логарифмических
частотных характеристик позволяет сравнительно просто и быстро
решать задачи анализа и синтеза систем высокого порядка, для кото-
рых все остальные методы практически оказываются мало приемле-
мыми.

7
Вопросы для самопроверки
1. Дайте формулировку понятия устойчивости и критерия устойчи-
вости.
2. Какие требования предъявляются к корням характеристического
уравнения для устойчивости САУ ?
3. Дайте формулировку теоремы Ляпунова, обосновывающей исполь-
зование линейной теории управления.
4. В чем состоит требование необходимого условия устойчивости? В
каких случаях оно является и достаточным?
5. Сформулируйте критерии устойчивости Вышнеградского, Гурви-
ца, Рауса. Оцените их практические возможности.
6. Методика построения кривой Михайлова, ее основные свойства.
7. Дайте формулировку критерия устойчивости Михайлова и оцени-
те его практические возможности.
8. Поясните, как из передаточной функции получить амплитудно-
фазовую характеристику (АФХ) и какой физический смысл имеет АФХ.
9. Как экспериментальным путем построить АФХ ? Сформулируйте
основные свойства АФХ.
10. Сформулируйте частотный критерий устойчивости для различ-
ных случаев устойчивости (неустойчивости разомкнутой системы).
11. Каково физическое содержание частотного критерия устойчивости ?
12. Назовите условия границы устойчивости по известным Вам кри-
териям устойчивости и поясните, как ими пользоваться при синтезе
системы.
13. Как определяется запас устойчивости по различным критериям
устойчивости ?
14. Сформулируйте частотный критерий устойчивости применитель-
но к логарифмическим частотным характеристикам.
6. Качество процесса управления и синтез линейных систем,исходя из заданного качества управления
Переходный процесс и основные показатели качества регулирования.
Анализ характера переходного процесса по корням характеристичес-
кого уравнения.
Диаграмма Вышнеградского и ее связь с видом характеристического
уравнения. Анализ и синтез систем третьего порядка с использованием
диаграммы Вышнеградского.

8
Степень устойчивости и определение параметров системы по заданной
степени устойчивости. Понятие степени устойчивости как приближенной
оценки быстроты затухания переходного процесса. Недостатки этой оцен-
ки качества. Смещенное уравнение. Определение параметров системы из
наибольшей степени устойчивости в общем виде. Диаграмма нормирован-
ных степеней устойчивости для систем 3-го порядка. Определение пара-
метров, исходя из максимальной степени устойчивости.
Методы повышения динамической точности автоматических систем.
Понятие законов регулирования и их влияние на процесс регулирова-
ния. Повышение порядка астатизма путем введения интеграла в закон
управления. Введение производных в закон управления.
Способы введения производных. Оценка их влияния на динамичес-
кие свойства системы.
Дополнительные обратные связи. Виды дополнительных обратных
связей. Жесткая отрицательная обратная связь и ее влияние на процесс
управления. Гибкая и изодромная обратные связи и их влияние на про-
цесс регулирования. Примеры использования дополнительных обрат-
ных связей.
Повышение точности системы управления на основе увеличения
коэффициента усиления в системе.
Повышение точности систем на основе применения комбинирован-
ного принципа управления.
Основные положения теории инвариантности. Абсолютная инвари-
антность и условия ее физической реализации. Инвариантность в сис-
темах регулирования по отклонению.
Синтез корректирующих устройств на основе логарифмических час-
тотных характеристик. Синтез последовательного и параллельного кор-
ректирующего устройства. Использование логарифмических частотных
характеристики для синтеза корректирующих устройств в системах,
порядок которых выше третьего. Отыскание запаса устойчивости сис-
темы любого порядка графическим способом.
Интегральные оценки качества переходного процесса и их использо-
вание для синтеза систем. Квадратичная интегральная оценка. Форму-
ла Красовского для вычисления квадратичной интегральной оценки.
Определение параметров системы, исходя из минимума интегральной
оценки. Улучшенная интегральная оценка и ее использование для оценки
качества переходного процесса и синтеза системы. Недостатки интег-
ральных оценок качества.

9
Приближенные оценки качества по частотным характеристикам. Их
место среди оценок качества. Понятие о частотных характеристиках зам-
кнутой системы и их получение.
Оценка качества по логарифмическим частотным характеристикам.
Показатель колебательности. Показатель быстродействия. Применение
логарифмических частотных характеристик при синтезе САУ.
Исследование системы управления построением областей устойчи-
вости в плоскости двух параметров.
Связь вещественной частотной характеристики замкнутой системы
с переходным процессом.
Некоторые свойства вещественных частотных характеристик как
приближенные оценки качества переходного процесса.
Диаграмма для построения вещественной частотной характеристики
замкнутой системы по АФХ той же системы в разомкнутом состоянии.
Способы построения процессов регулирования линейных систем.
Аналитический метод построения переходного процесса:
- путем пересчета начальных условий при решении неоднородного
дифференциального уравнения замкнутой системы ;
- на основе использования операционного метода.
Основные теоремы операционного исчисления, используемые при
расчете переходного процесса.
Построение переходного процесса на основе использования веще-
ственных трапецеидальных частотных характеристик.
Переходная и весовая функции замкнутой системы управления. По-
лучение процесса регулирования при известной реакции системы на
единичный импульс [1. С. 179–194; 204–230; 236–282].
Методические указания
Изложенный раздел курса заключает предыдущие разделы. В нем при-
водятся основные теоретические положения о качестве регулирования и
методы построения автоматических систем по заданному качеству.
Знание способов и методики определения параметров системы не-
обходимо специалисту в его практической деятельности. В связи с
этим материалы этого раздела необходимо усвоить в первую очередь.
При изучении оценок качества особое внимание следует обратить
на достоинства, недостатки и практические возможности каждой из них.
Рекомендуется запомнить порядок решения задач по определению па-
раметров системы каждым из известных методов.

10
Вопросы для самопроверки
1. Назовите основные показатели качества процесса регулирования.
2. Как пользоваться диаграммой Вышнеградского при анализе и син-
тезе системы ?
3. Объясните понятие степени устойчивости.
4. Назовите недостатки оценки качества по степени устойчивости.
5. Какие интегральные оценки качества процесса регулирования Вы
знаете ? Поясните их геометрический смысл.
6. Как определяются параметры системы исходя из минимальной ин-
тегральной оценки качества ?
7. Укажите недостатки интегральных оценок качества.
8. Напишите формулу связывающую процесс регулирования и веще-
ственную частотную характеристику.
9. Перечислите свойства вещественных частотных характеристик как
приближенные оценки качества переходного процесса.
10 Как построить процесс регулирования аналитическим (класси-
ческим) способом ?
11. Как приближенно построить переходный процесс, пользуясь тра-
пецеидальными характеристиками ?
12. Каким образом можно повысить точность автоматических сис-
тем?
13. Как построить желаемую ЛАХ?
7. Случайные процессыв автоматических системах управления
Случайные процессы и их основные вероятностные характеристики.
Корреляционные функции и спектральная плотность случайных про-
цессов.
Прохождение случайных сигналов через линейные динамические зве-
нья. Вычисление значения квадрата ошибки. Синтез систем с мини-
мальной среднеквадратической ошибкой при случайных воздействиях
[2. С. 142–205].
Методические указания
В тех случаях, когда внешние возмущающие или задающие воздей-
ствия на систему регулирования действуют непрерывно или следуют
через промежутки времени меньше продолжительности переходного

11
процесса в системе и при этом носят случайный характер, анализ и
синтез системы регулирования – выбор структуры и определение опти-
мальных значений параметров системы, удовлетворяющих заданным
тактико-техническим требованиям к заданному качеству процесса регу-
лирования – следует проводить методами статистической динамики.
При изучении этого раздела следует обратить внимание на существо
вероятностного подхода к анализу внешних воздействий на систему и
уяснить методику выбора структуры системы и определения оптималь-
ных значений параметров системы исходя из критерия минимума сред-
ней квадратической ошибки.
Вопросы для самопроверки
1. Какие статистические характеристики используются для анализа
работы автоматических систем при случайных воздействиях?
2. Приведите основные формулы определения среднего значения
квадрата ошибки стационарных систем.
3. Напишите формулу для определения спектральной плотности вы-
ходного сигнала системы по заданной спектральной плотности входно-
го сигнала.
1. Поясните сущность методов синтеза системы при случайных воз-
действиях на входе по минимуму средней квадратической ошибки на
основе:
- определения оптимальной структуры системы ;
- выбора оптимальных значений параметров системы при заданной
структуре.
8. Особые линейные системы автоматического управления
Системы с переменными параметрами. Определение переходной функ-
ции и функции веса. Построение переходных процессов для систем перво-
го и второго порядка. Системы с запаздыванием и с распределенными па-
раметрами. Уравнение линейных систем с запаздыванием. Исследование
устойчивости и качества регулирования систем с запаздыванием. Опреде-
ление критического времени запаздывания [3. С. 206–226].
Методические указания
Этот раздел курса объединяет достаточно часто встречающиеся в
авиационной технике и САУ системы с переменными параметрами, с
запаздыванием и распределенными параметрами.

12
Движение линейной системы с переменными коэффициентами опи-
сывается линейными дифференциальными уравнениями с переменны-
ми во времени коэффициентами. Переменными во времени параметра-
ми обладают подвижные объекты, такие как самолеты.
Особое внимание следует обратить на существенную разницу меж-
ду переходной и весовой функциями обыкновенной системы и системы
с распределенными параметрами, на особенности построения переход-
ных процессов, а также особенности синтеза таких систем.
При изучении систем с запаздыванием особое внимание следует об-
ратить на то, как влияет временное запаздывание на устойчивость и
качество регулирования.
Вопросы для самопроверки
1. Чем отличаются системы с переменными коэффициентами и сис-
темы с запаздыванием от обыкновенных линейных систем?
2. В каких случаях необходимо учитывать временное запаздывание в
системе и как оно влияет на качество процесса регулирования?
3. Какие из обычных критериев устойчивости можно применять к
исследованию систем с запаздыванием и в чем особенность их приме-
нения?
9. Нелинейные системы автоматического управления
Общие понятия, основные свойства и особенности нелинейных сис-
тем. Типовые нелинейности в системах регулирования и их характери-
стики. Уравнения звеньев с различными видами нелинейности. Каче-
ственное различие движений в линейной и нелинейной системах.
Методические указания по применению методов
исследования нелинейных систем
Понятие фазового пространства и фазовых траекторий. Изображе-
ние процессов регулирования с помощью фазовых траекторий. Поня-
тие устойчивости по Ляпунову. Фазовые портреты нелинейных систем
регулирования. Особые точки и линии фазовых портретов. Пример по-
строения фазовых траекторий для нелинейной системы регулирования
с объектом, не обладающим самовыравниванием, идеальным регулято-
ром и идеальным исполнительным устройством с зоной насыщения.
Анализ нелинейных систем регулирования с использованием метода
фазовых траекторий. Условие получения скользящего режима работы.

13
Метод гармонического баланса. Теоретические основы метода. Гар-
моническая линеаризация нелинейностей. Коэффициенты гармоничес-
кой линеаризации типовых нелинейных звеньев. Аналитический метод
определения параметров автоколебаний. Метод расчета автоколебаний
с использованием кривой Михайлова (вариант Гольдфарба). Метод при-
пасовывания. Особенности метода, его значение для решения кусочно-
линейных задач и определения автоколебаний в релейных системах.
Пример практического использования.
Исследования движений нелинейных систем при наличии внешних
возмущений.
10. Оптимальные и адаптивные системы
Понятие оптимальных систем и критериев оптимальности. Системы
экстремального управления и их особенности. Принципиальные осно-
вы создания самонастраивающихся систем [2. С. 4–50; 402–440].
Методические указания
Последний раздел курса является наиболее трудным в усвоении ма-
териала. Сложность вызывается большим количеством новых понятий
и необычными для линейной теории представлениями о процессах в
нелинейных системах управления. Особенно сложным в изучении пред-
ставляются вопросы анализа устойчивости движения.
Как известно, движение в нелинейных системах значительно разно-
образнее, чем в линейных системах. Эти движения не могут быть опи-
саны линейными дифференциальными уравнениями, и для их анализа
требуются более сложные методы.
Нелинейные системы все чаще используются в САУ летательных ап-
паратов в силу ряда важнейших свойств (быстродействия, простоты
устройства и т. д.).
Для закрепления знаний и приобретения необходимых навыков ре-
шения нелинейных задач рекомендуется решить различными методами
простейшую нелинейную задачу. Лучше всего решать одну и ту же за-
дачу, что дает возможность сравнить эти методы и выяснить их особен-
ности. В качестве примера удобно взять простейшую релейную следя-
щую систему.
В разделе адаптивных систем следует усвоить особенности экстре-
мальных и самонастраивающихся систем, виды их и подход к анализу
их работы.

14
Вопросы для самопроверки
1. Укажите достоинства и недостатки систем управления.
2. Какие из типов движений, характерных для нелинейных систем,
не могут существовать в линейной системе? Поясните причину их воз-
никновения.
3. Что такое автоколебания? С какими видами движений линейной
системы они схожи по форме и чем качественно отличаются от них?
4. Запишите уравнения известных Вам нелинейностей.
5. Дайте определение особой точке и предельному циклу. Поясните
их физический смысл.
6. Назовите типы фазовых портретов линейной системы и укажите
особенности фазовых портретов нелинейных систем.
7. Сформулируйте понятие устойчивости по Ляпунову. Поясните его
на примерах линейной и нелинейной систем.
8. В чем содержание метода фазовых траекторий? Укажите его осо-
бенности и порядок решения задач этим методом.
9. Что положено в основу метода припасовывания и каков порядок
решения задач этим методом?
10. В чем состоит идея метода гармонического баланса (гармоничес-
кой линеаризации), каковы его возможности и от чего зависит точность
решения задач этим методом?
11. Назовите варианты метода гармонического баланса и укажите в
чем сходство и различие?
12. Чем отличаются экстремальная и самонастраивающаяся системы
от обычных автоматических систем?
13. Назовите достоинства и недостатки релейных экстремальных си-
стем управления.

15
МЕТОДИЧЕСКИЕ УКАЗАНИЯК ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ
В качестве курсовой работы студенту предлагается произвести рас-
чет одного из вариантов системы автоматического управления.
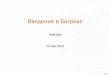
На рис. 1 и 2 приведены функциональные схемы (в упрощенном
виде) двух типов САУ, кратко описана их работа и приведены уравне-
ния динамических звеньев, входящих в данные системы.
В каждом варианте курсовой работы предусмотрено 10 вариантов
исходных данных.
Для выполнения курсовой работы необходимо использовать учеб-
ные пособия [6, 7], в которых приводятся теоретические положения,
необходимые для выполнения работы, и указания по выполнению са-
мой работы.
Вариант 1
Система управления курса летательного аппарата
Упрощенная функциональная схема системы стабилизации курса ЛА
– самолета изображена на рис. 1, а и б.
Отклонение самолета от заданного курса, т. е. углы рысканья само-
лета, принимаются малыми. Зависимость движения самолета по курсу
от движения по тангажу и от движения по крену пренебрегаем.
Система автоматического управления, представленная на рис. 1, со-
стоит из:
- самолета – объекта управления;
- автопилота – регулятора.
Основной задачей автопилота является автоматическое поддержание
заданного курса летательного аппарата с определенной точностью.
Возмущающие воздействия (несимметричность тяги двигателей, по-
рывы ветра и т. д.) отклоняют самолет от заданного курса.
Датчик угла (ДУ) – гироскоп направления – измеряет это откло-
нение – угол ψ, датчик угловой скорости (ДУС) измеряет угловую

16
скорость ψ� этого отклонения, а датчик углового ускорения (ДУУ) –
угловое ускорение ψ�� . Результаты измерений в виде электрических
сигналов U1 , U
2 , U
3 поступают на вход усилителя мощности (УМ),
который одновременно является и суммирующим устройством. С
выхода усилителя мощности сигнал в виде переменного тока посту-
пает на обмотку управления реверсивного двигателя D переменного
тока, который через редуктор Р поворачивает рулевую поверхность
РП на угол ψ.
Уравнения звеньев
1. Уравнение, описывающее поведение объекта регулирования – са-
молета, может быть записано в следующем виде:
(Т1р + 1) р∆ψ = –K
1∆δ+ f
1(t). (2.1)
Самолет
Исполнительное
устройствоУсилитель
Датчик углового
ускорения
Датчик угловой
скорости
Датчик угла
ψf1(t)
Рис. 1
а)
б)
ψ
ψст
ψ3 ДУ ДУС
ДУУ УС Р

17
2. Уравнения измерителей:
– уравнения датчика угла –
U1 = K
2∆ψ, (2.2)
– уравнение датчика угловой скорости –
U2 = K
3 р∆ψ, (2.3)
– уравнение датчика углового ускорения –
U3 = K
4 р2∆ψ . (2.4)
Уравнения (2.2)–(2.4) получены из допущения, что ДУ, ДУС и ДУУ
считаются идеальными безынерционными позиционными звеньями.
3. Уравнение усилителя мощности. Усилитель представляет собой
три каскада усиления и суммирующий каскад. Его уравнение связыва-
ет выходной сигнал ∆I c входными напряжениями ∆U1, ∆U
2, ∆U
3
(T2p + 1) ∆I = K
5 ∆U
1+ K
6 ∆U
2+ K
7 ∆U
3. (2.5)
4. Уравнение исполнительного устройства. Исполнительное устрой-
ство состоит из электродвигателя D, редуктора Р и рулевой поверхнос-
ти РП. Выходная координата связана с входной I соотношением
(T3p + 1) p∆δ = K
8∆I. (2.6)
Все приведенные ранее уравнения записаны в отклонениях. Форма
записи – операторная.
Уравнения (2.2)–(2.6) в совокупности характеризуют поведение регуля-
тора. В данном случае регулятором является автопилот. Разрешив указан-
ные уравнения относительно ∆δ и ∆ψ, получим уравнение автопилота
T2T
3p + (T
2+ T
3) p∆δ = ( Kψ�� p2 + Kψ� p + Kψ) ∆ψ, (2.7)
где
Kψ�� = K4K
7K
8, Kψ� = K
3K
6K
8, Kψ = K
2K
5K
8.
Совокупность уравнений (2.1) и (2.7) характеризует поведение всей
системы управления курса самолета. Исключая из них промежуточную
переменную ∆δ, получим единое дифференциальное уравнение рассмат-
риваемой системы. Оно связывает выходную регулируемую величину
∆ψ и возмущающее воздействие f1(t).
Исходные данные
В процессе выполнения курсовой работы следует принять T2 = T
3 = 0.
Возмущаюшее воздействие f1(t) – в виде скачка заданной величины.

18
Начальные условия, характеризующие состояние системы до скачка
возмущения:
0 0 00, 0, 0.− − −∆ψ = ∆ψ = ∆ψ =� ��
Значения известных параметров и возмущающего воздействия с уче-
том варианта указаны в табл. 1.
Таблица 1
Номер
варианта
Исходные данные
T1, c K
1, 1/c Kψ, 1/c f
1(t), рад/с
1 1 2,5 3 0,5
2 2 4,5 4 0,6
3 3 6 2,5 0,7
4 4 4 1,5 0,8
5 5 2 3,5 0,9
6 6 1,5 6 1
7 7 3,5 5 1,1
8 8 5,5 3 1,2
9 7,5 5 5,5 1,3
10 3,5 3 6,5 1,4
Неизвестными величинами являются коэффициенты:
4 7 8 3 6 8 и .K K K K K K K Kψ ψ= =�� �
Вариант 2
Следящая система
Функциональна схема следящей системы приведена на рис. 2, а и б.
Система предназначена для слежения в реальном времени и постоян-
ном масштабе вала управляемого объекта (УО) за положением задаю-
щего вала (ЗВ).
Вращением рукоятки задается произвольный закон для угла поворо-
та задающего вала ЗВ во времени α(t). Тот же самый закон угла поворо-
та во времени должен быть автоматически воспроизведен в заданном
масштабе и в реальном времени на выходе следящей системы β(t) , т. е.
на управляемом объекте УО.

19
Для этой цели угол поворота на выходе β(t) передается с помощью вала
обратной связи ОС на вход системы, где он вычитается из задаваемого угла
α(t). Вычитание осуществляется с помощью механического дифференциа-
ла МД. Механический дифференциал, выполняющий функцию датчика
рассогласования, сравнивает углы поворота задающего вала ЗВ и вала об-
ратной связи ОС. Поскольку датчик рассогласования должен сравнивать
величины одного масштаба, в цепь обратной связи включен редуктор Р, зада-
чей которого является изменение масштаба угла β. Если угол поворота α(t)
задающего вала ЗВ не равен углу поворота α1(t) вала обратной связи ОС , то
третий валик дифференциала МД повернется на разность этих углов
γ(t) = α(t) – α1(t).
Полученное рассогласование γ(t) с помощью потенциометра П пре-
образуется в напряжение U1, которое через дифференцирующий кон-
тур, состоящий из емкости С и сопротивлений R1 и R
2, подается на вход
усилителя У. Усиленный усилителем ток поступает на обмотку возбуж-
дения генератора Г, цепь якоря которого последовательно соединена с
цепью якоря двигателя Д, который через редуктор Р поворачивает вы-
ходной вал управляемого объекта УО на угол
β = K0α.
Датчик согласования
Исполнительноеустройство
УсилительДифферен-цирующая
цепь
Датчикугла
γα
Рис. 2
а)
б)
α
α1
γ ω β
β
α1
I2
U1
U2R
2
R1
Г ДУМД
ОС
Р2
Р1
УО

20
Если α1 = α, то сигнала рассогласования нет, двигатель обесточен и
вращения вала двигателя не будет.
Уравнения звеньев
1. Уравнение управляемого объекта с двигателем в операторной форме
записи имеет вид
(T1p + 1) p β = K
1I2 – f(t). (2.8)
2. Уравнение датчика рассогласования
γ = α – α1. (2. 9)
3. Уравнение потенциометра
U1 = K
2γ . (2.10)
4. Уравнение дифференцирующего контура
(T2p + 1) U
2 = K
3(T
5p + 1) U
1, (2.11)
где
1 2 22 5 1 3
1 2 1 2
, , .CR R R
T T R C KR R R R
= = =+ +
Постоянная времени T2 определяет методическую ошибку при диф-
ференцировании. Для уменьшения этой ошибки рекомендуется придер-
живаться соотношения
T2 = 0,1 T
5.
5. Уравнение усилителя
(T3p + 1) I
1 = K
4 U
2. (2.12)
6. Уравнение цепи якорей
(T4p + 1) I
2 = K
5I1 – K
6pβ. (2.13)
7. Уравнение обратной связи
α1
= 1/K0β. (2.14)
Для получения единого уравнения замкнутой системы следует ре-
шить систему уравнений (2.8)–(2.14) относительно рассогласования и
задающего воздействия .
Исходные данные
При выполнении курсовой работы следует принять T3 = T
4 = K
6 = 0.
Внешнее возмущающее воздействие считать равным нулю (f(t) = 0).

21
Задающее воздействие – (угол поворота входного вала следящей си-
стемы) – в виде скачка указанной величины.
Начальные условия, характеризующие состояние системы до скачка
0 0 00, 0, 0.− − −γ = γ = γ =� ��
Должно быть удовлетворено требование статической точности системы
при работе в режиме слежения с постоянной угловой скоростью α.
Неизвестными величинами являются общий коэффициент усиления
системы в разомкнутом состоянии и параметр дифференцирующего кон-
тура T.
Значения известных параметров, задающего воздействия и допусти-
мой статической ошибки γст
по вариантам указаны в табл. 2.
Таблица 2
Номер
варианта
Исходные данные
T, С K0
α γст
, угл,мин α, рад/с
1 0,1 0,75 1,0 1 0,5
2 0,15 0,50 0,9 2 0,8
3 0,20 1,75 0,8 3 1,0
4 0,25 1,00 0,7 4 1,5
5 0,30 1,25 0,6 5 1,7
6 0,35 1,50 0,5 6 2,0
7 0,40 0,75 1,2 7 2,2
8 0,45 2,00 1,5 8 2,5
9 0,50 1,25 2,0 9 2,8
10 0,60 1,75 1,0 10 3,0
Порядок выполнения курсовой работы
1. Выполнение курсовой работы проводится по установленному на
заочном отделении факультета порядку. При выполнении курсовой ра-
боты рекомендуется пользоваться методическими пособиями [4–7].
2. Вид автоматической системы и номер варианта выполняемой кур-
совой работы определяется по номеру шифра студента.
Студенты, у которых предпоследняя цифра номера шифра нечетная,
рассматривают систему управления курса самолета, а студенты, у кото-

22
рых предпоследняя цифра номера шифра четная, рассматривают следя-
щую систему.
Номер варианта определяется последней цифрой шифра.
Последовательность выполнения курсовой работы
1. Ознакомиться с заданием, принципом действия и условиями рабо-
ты проектируемой САУ. Ознакомиться с литературой, рекомендованной
для выполнения курсовой работы.
2. Составить функциональную схему анализируемой системы.
3. Составить передаточные функции звеньев системы и структур-
ную схему САУ.
4. Привести систему уравнений по звеньям к единому линейному
дифференциальному уравнению. Преобразуя структурную схему, полу-
чить выражения для передаточных функций разомкнутой и замкнутой
системы.
5. Вывести уравнение статики системы и использовать его для пред-
варительного расчета коэффициента усиления системы (только для сле-
дящей системы).
В дальнейшем при выполнении п. 6 значение коэффициента считать
неизвестным, а при выполнении пп. 7–11 использовать результат рас-
чета, полученный в п. 5.
6. Используя критерий устойчивости Вышнеградского, построить
границу устойчивости в плоскости неизвестных параметров и выде-
лить область устойчивости проектируемой САУ.
7. Определить неизвестные параметры системы исходя из максималь-
ной или наибольшей степени устойчивости.
8. Определить неизвестные параметры системы исходя из минималь-
ной или наименьшей интегральной оценки ее качества.
9. Построить логарифмические характеристики разомкнутой и замк-
нутой цепи. Оценить устойчивость по амплитуде и по фазе.
При выполнении данного и последующих пунктов следует исполь-
зовать параметры, найденные исходя из минимальной или наименьшей
интегральной оценки качества САУ.
10. Построить процесс регулирования аналитическим (классическим
способом).
11. Построить процесс регулирования системы частотным способом.
12. Построить кривую Михайлова.
13. Построить АФХ разомкнутой системы.

23
Правила оформления курсовой работы
1. Оформление курсовой работы определяется соответствующими
ГОСТами РФ, они изложены в [4–7].
2. К установленному сроку законченная курсовая работа отсылается
или сдается в деканат факультета на рецензию.
3. Исправление отмеченных рецензентом ошибок или переделку от-
дельных частей курсовой работы надо делать в той же тетради, в кото-
рой была оформлена незачтенная работа, добавляя в нее, если это по-
требуется, дополнительные листы.
При защите к исправленной работе необходимо приложить отзыв
рецензента. Отдельно от работы исправления не рассматриваются.
4. Зачтенные курсовые работы студентам не возвращаются. Ознако-
миться с зачтенной работой можно при сдаче экзамена.
Библиографический список
1. Теория автоматического управления /Под ред. А. А. Воронова. М.:
Высшая школа,1986. Ч. 1. 303 с.
2. Теория автоматического управления /Под ред. А. А. Воронова. М.:
Высшая школа,1986. Ч. 2. 228 с.
3. Попов Е. П. Теория линейных систем автоматического регулиро-
вания и управления. М.: Наука, 1978. 256 с.
4. Попов Е. П. Теория нелинейных систем автоматического регули-
рования и управления. М.: Наука», 1979. 255 с.
5. Бесекерский В. А., Попов Е. П. Теория систем автоматического
регулирования. М.: Наука, 1975. 767 с.
6. Ерофеев В. М., Глушенко В. И. Учебное пособие к курсовой рабо-
те по теории автоматического регулирования / Под ред. В. М. Кушуля;
ЛИАП. Л., 1977. Ч. 1. 105 с.
7. Ерофеев В. М., Глушенко В. И., Кушуль В. М. Учебное пособие к
курсовой работе по теории автоматического регулирования / Под ред.
В. М. Кушуля; ЛИАП. Л., 1980. Ч. 2. 87 с.

24
Оглавление
Программа .............................................................................................. 1
1. Введение в курс ............................................................................ 1
2. Принцип действия и общие свойства систем автоматического
управления. Основные понятия и определения ...................... 1
3. Дифференциальные уравнения и передаточные функции
САУ ................................................................................................ 3
4. Элементы систем автоматического управления ....................... 4
5. Устойчивость линейных систем автоматического управления 5
6. Качество процесса управления и синтез линейных систем,
исходя из заданного качества управления ................................ 7
7. Случайные процессы в автоматических системах
управления.................................................................................... 10
8. Особые линейные системы автоматического управления ....... 11
9. Нелинейные системы автоматического управления ................ 12
10. Оптимальные и адаптивные системы ....................................... 13
Методические указания к выполнению курсовой работы ........... 15
Вариант 1. Система управления курса летательного аппарата .... 15
Вариант 2. Следящая система........................................................... 18
Порядок выполнения курсовой работы........................................... 21
Библиографический список ................................................................... 23