Embed Size (px)
Citation preview

Research ArticleNonlinear Dynamic Behavior of Winding Hoisting Rope underHead Sheave Axial Wobbles
Guoying Wang1 Xingming Xiao 1 Chi Ma12 Gang Cheng1 and Xiao Di1
1School of Mechatronic Engineering China University of Mining and Technology Xuzhou 221116 China2School of Information and Electrical Engineering China University of Mining and Technology Xuzhou 221116 China
Correspondence should be addressed to Xingming Xiao xxm_cumt126com
Received 19 January 2019 Revised 22 April 2019 Accepted 30 April 2019 Published 26 May 2019
Academic Editor Chao Tao
Copyright copy 2019GuoyingWang et alis is an open access article distributed under the Creative CommonsAttribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Axial wobbles of the head sheave due to manufacturing accuracy and installation technology can exert periodic lateral excitationsto the winding hoisting rope A hoisting rope consists of a constant catenary rope from the drum to the head sheave and a variablevertical rope from the head sheave to the conveyance e longitudinal and lateral vibration responses of the hoisting rope arecoupled to each other In this paper the coupled lateral-longitudinal governing equations of the winding hoisting system underthe axial wobble excitations of the head sheave are established by the Hamilton principle e governing equations are nonlinearinfinite-dimensional partial differential equations which are discretized into the finite-dimensional ordinary differentialequations through the Galerkin method e dynamic responses of the hoisting rope under the head sheave axial wobbles aregiven by MATLAB simulation when the winding hoist is lifting or lowering e results show that lateral vibration displacementsof the vertical rope under the head sheave axial wobbles are larger than those of the catenary rope e axial wobble amplituderange of the head sheave is given to limit the lateral vibration displacements of the hoisting rope
1 Introduction
In order to increase production power coal is being minedfrom strata at ever-increasing depths e safety and re-liability of the ultradeep mine hoist are becoming in-creasingly significant [1] A hoisting rope of the windinghoist consists of a constant catenary rope from the drum tothe head sheave and a time-varying vertical rope from thehead sheave to the conveyance e catenary rope andvertical rope are coupled at the head sheave Manufacturingprecision and installation process of the head sheave willsubject it to periodic axial wobbles ey cause the hoistingrope to generate periodic lateral vibrations which may beable to cause the rope to break erefore there is a need toresearch lateral vibration responses of the winding hoist ropeunder axial wobbles of the head sheave
e kinematics and dynamics of cables and strings haveattracted interest of a large number of researchers [2ndash12]e lateral vibration characteristics of axially moving stringsare reviewed [13]e dynamic responses of the string undera single motion force are given through the perturbation and
numerical methods [2] e dynamic behavior of the winchrope during winding or unwinding is given which is verifiedwith a new software toolbox [3] e bending momentexpression of the catenary rope is derived from the bendingmoment equation and its large sag and bending stiffness areobtained [14] rough the Galerkin method the nonlineardynamic characteristics of axially moving viscoelastic stringsare given [4] e steady-state periodic lateral behaviors ofaxially accelerating viscoelastic cables are given through theHamilton principle and the Kelvin viscoelastic method [5]e vibration behaviors of the rope with variable length andthe lower-end additional mass-spring system are obtained bythe multiscale method [6] A spatial discretization method isgiven in order to predict dynamic characteristics of a time-varying rope system [7 8]e integrated model of the high-level building elevator is given e research results showthat nonlinear dynamic behaviors entering the various partsof a building elevator are mutually influential [9] enonlinear lateral vibration behaviors of the flexible elevatorcable with variable length are given by the Hamiltonprinciple [10] e autoresonance characteristics of the
HindawiShock and VibrationVolume 2019 Article ID 7026125 11 pageshttpsdoiorg10115520197026125
lateral vibration of the elevator rope and the initial boundaryvalue problem of lateral displacements due to boundaryexcitation are given [11 12]
For dynamic behaviors of the hoisting rope in the coalmine hoisting system some researchers conducted the fol-lowing research e lateral vibration responses of the inclinecable and the longitudinal vibration responses of the verticalcable are researched through the Hamilton principle and themoving coordinate frame method [15 16] e dynamicbehaviors of the winding hoist under flexible guides arestudied based on the FDM e influences of conveyanceeccentricity and drum radius inconformity on the windinghoisting system are analyzed [17]e vibration characteristicsand control of thewinding cable through crossover areas in thecoal mine hoister are studied through the geometric method[18] e lateral vibration characteristics of the catenary ropein the multirope friction hoisting system are researched andverified by experiment [19]e dynamic characteristics of themine hoisting ropes with variable length and roller guides withthe diameter inconformity of drums are given by the Vd-FEMand Lagrangersquos equations e results show that the diameterinconformity of drums has a great influence on the tensiondeviation of the hoisting ropes [20] e coupled longitudinaland torsional vibration equations of the multicable hoistingsystem in mine construction are derived through the con-strained Lagrange equation e results of numerical calcu-lations are verified by Adams software [21]
From above literatures few literatures have studieddynamic behaviors of the winding hoisting rope under thehead sheave axial wobbles Axial wobbles of the head sheavecause periodic lateral vibrations of the winding hoistingrope e lateral and longitudinal vibrations of the windinghoisting rope are coupled to each other rough theHamilton principle the coupled lateral-longitudinal gov-erning equations of the winding hoisting rope under theaxial wobbles of the head sheave are obtainede governingequations are nonlinear infinite-dimensional partial differ-ential equations and the Galerkin method is applied todiscretize the governing equations into finite-dimensionalordinary differential equations e fourth-order RungendashKutta method has been applied to work out ordinary dif-ferential equations e numerical simulation and analysisare performed for the lateral vibration responses of thehoisting rope under the axial wobbles of the head sheavewhen the coal mine hoister is lifting or lowering
e remainder of the paper is given as follows In Section2 the mathematical model of the winding hoisting system isobtained and discretized In section 3 the numerical sim-ulation and analysis are performed for the dynamic re-sponses of the winding hoist rope under the axial wobbles ofthe head sheave In section 4 the conclusions are given
2 Mathematical Model of the WindingHoisting System
21 Axial Wobbles of the Head Sheave e axial wobblefrequency of the head sheave is mainly the first three ordersof periodic rotation frequencies [19] In this paper thefirst three orders of axial wobbles of the head sheave are
used as the excitations for the lateral vibration of thehoisting rope e excitation function of axial wobbles ofthe head sheave is
em(t) Bm sin mc(t)
Rs
t1113888 1113889 (1)
where Bm is the mth axial wobble amplitude of the headsheave (m 1 2 and 3) c(t) is the working velocity of thewinding hoist t is the hoisting time of the hoist and Rs is theradius of the head sheave
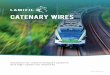
22 Description of the Mathematical Model Multiplehoisting ropes are parallel to each other in the hoistingsystem us multiple hoisting ropes are considered to bea hoisting rope as the research object e model ofa winding hoisting system is shown in Figure 1 It includesa drum a catenary rope a head sheave a vertical ropea conveyance spring dampers and roller guides
In this paper two coordinates of the reference areestablished e contact point between the drum and thecatenary rope is the reference system OcXcYc e contactpoint between the head sheave and the vertical rope is thereference system OvXvYv
In this paper lc0 lc1 lv0 and lv1 denote the contact pointof the catenary rope and the winding drum contact point ofthe catenary rope and the head sheave contact point of thevertical rope and the head sheave and contact point of thevertical rope and the conveyance respectively lc denotes theconstant length of the catenary rope lv(t) denotes the time-varying length of the vertical rope u(x t) andw(x t) denotethe longitudinal and lateral vibration displacements at x(t) ofthe hoisting rope respectively ρ is the linear density of thehoisting cable g is the gravity acceleration a is the workingacceleration E is Youngrsquos modulus of the hoisting rope A isthe effective cross-sectional area of the hoisting rope θ is theslope angle of the catenary rope and mp is the hoisted massper rope e subscripts t x c and v indicate the partialdifferential of t the partial differential of x catenary ropeand vertical rope respectively
e following assumptions are used to restrain the analysis(1) e hoisting rope material is uniform (2) e structureparameters of the hoisting rope remain invariant (3) e slipof the hoisting rope is ignored (4)e torsional and transverseout-of-plane vibration responses of the hoisting cable are ig-nored (5) e elastic displacements due to longitudinal andlateral vibrations are greatly smaller than the length of thehoisting rope (6) e effect of the air resistance is ignored
e mathematical model of the winding hoisting systemis obtained through the Hamilton principle e motion ofthe system between t t1 and t t2 is
1113946t2
t1
δEk minus δEp + δW1113872 1113873dt 0 (2)
where Ek Ep and δW denote the kinetic energy potentialenergy and virtual work of the winding hoisting systemrespectively For the sake of simplicity u(x t) w(x t) lc(t)lv(t) em(t) x(t) a(t) and c(t) indicate u w lc lv em x aand c respectively
2 Shock and Vibration
Equation (2) can be solved through the variationalprinciple and Leibnizrsquos rule erefore the coupled lateral-longitudinal governing equations of the hoisting system areobtained as follows
ρ Ωu + a( )minusTux minusEAΦux ρgb (3)
ρΩw minus TwxWx + TwWxx( )
minusEA ΦwxWx +ΦwWxx( ) 0(4)
where Ωu and Ωw are the dierential operator matrices ofthe longitudinal and lateral governing equations re-spectively Tu and Tw are the static tension matrices of thelongitudinal and lateral governing equations respectivelyΦu and Φw are the strain matrices of the longitudinal andlateral governing equations respectively W is the matrix oflateral vibration displacements a is the acceleration vectorand b is the column vector respectively ese matrices andvectors are expressed as
Tw Tc 0
0 Tv[ ]
Φw εc 0
0 εv[ ]
Ω Ωc Ωv[ ]T
Tu Tc Tv[ ]T
Φu εc εv[ ]T
W wc wv[ ]T
a a a[ ]T
b 1 1[ ]T
(5)
Equation (3) is the longitudinal governing equation ofthe hoisting rope in the winding hoisting system andequation (4) is the lateral governing equation of the hoistingrope in the winding hoisting system
e static tension of the hoisting rope is caused not onlyby the weight of the conveyance but also by its own weighterefore the static tension of the hoisting rope can beexpressed as
Tc(x t) mpg + ρ lv minus lc minusxc( )sin(θ)( )g
Tv(x t) mpg + ρ lv minus xv( )g(6)
where Tc(x t) is the static tension of the catenary rope andTv(x t) is the static tension of the vertical rope
e dierential operatorsΩu andΩw can be expressed as
Ωu utt + 2cuxt + aux + c2uxx
Ωw wtt + 2cwxt + awx + c2wxx(7)
According to Greenrsquos symmetric strain tensor thestrain of the catenary rope and vertical rope can beexpressed as
εc ucx + 05w2cx
εv uvx + 05w2vx
(8)
e initial boundary conditions of the winding hoistingsystem are given by
uc lc0 t( ) 0
wc lc0 t( ) 0(9)
e longitudinal and lateral boundary equations of thehoisting system at the head sheave are as follows
JsR2s
Ωuc1 + a( )minus cs c + uc1t( ) + EA εv0 minus εc1( ) 0 (10)
mpΩwd minusEAΦdWdx minus mpg + csc( )Wdx
minus csWdt em(11)
where Js is the inertia moment and cs is the friction co-ecient between the hoisting rope and the head sheave esubscripts c1 and v0 indicate the lc1 point and lv0 pointesematrices can be expressed as
Φd εc1 0
0 εv0
Ωwd Ωc1 Ωv0[ ]T
Wd wc1 wv0[ ]T
em em em[ ]T
(12)
e longitudinal vibration displacements of the cate-nary rope are transmitted to the vertical rope at the headsheavee longitudinal vibration displacement relationship
em(t)
Springdamper
c2
k2Rollerguide
xv(t)Xc
Xv
x c(t)
Yc
lv1
lc1ls
wv(x t)
wc(x t)uc(x t)
uv(x t)
lv(t)
Drum
Catenary
rope Head
sheave
Oc
Ov
Verticalrope
Yv
lv0
lc0
l c
Conveyance
Figure 1 Model of a winding hoisting system
Shock and Vibration 3
between the catenary rope and the vertical rope can beobtained by
uv0 uc1
ecsls (13)
e boundary equations of the hoisting system at theconveyance can be expressed as
mp Ωuv1 + a( 1113857 + EAεv1 + ρglv1 0 (14)
mpΩwv1 + EAεv1 + Tv1 + cc( 1113857wv1x
+ cwv1t + kwv1 0(15)
where k denotes spring stiffness of the roller guide and cdenotes spring damping of the roller guide e subscript v1indicates the lv1 point
Equations (14) and (15) are the longitudinal and lateralboundary equations of the hoisting system at the convey-ance respectively
23 Discretization of the Mathematical Model Lateralboundary equation of the hoisting system at the head sheaveis in a nonhomogeneous form It is necessary to change thenonhomogeneous equation to the homogeneous equationSuppose the lateral vibration displacements of the hoistingsystem can be expressed as
w(x t) y(x t) + em 1minusx
l1113874 1113875 (16)
where y(x t) is the homogeneous equation Insertingequation (16) into equations (4) (11) and (15) the coupledlateral-longitudinal infinite-dimensional nonlinear partialdifferential homogeneous equations of the hoisting rope areobtained and then the Galerkin method is used to discretizethem into the finite-dimensional ordinary differentialequations
To facilitate the analysis of the model a dependentvariable ψ xl is defined A domain [0 l] with x istransformed into a domain [0 1] with ψ Longitudinal andlateral vibration displacements of the hoisting rope can bedefined by
u(ψ t) 1113944n
i1ϕi(ψ)qui(t)
y(ψ t) 1113944n
i1φi(ψ)qwi(t)
(17)
where n is the order of truncation e fourth-orderGalerkin truncation is available which enables to obtainprecise numerical results [22] and thus n 4 qui(t) andqwi(t) are longitudinal and lateral generalized co-ordinates respectively ϕi(ψ) and φi(ψ) are longitudinaland lateral trail functions respectively and they can beexpressed as
ϕi(ψ) 2
radicsin
2iminus 12
πψ1113874 1113875 i 1 2 middot middot middot 4
φi(ψ) 2
radicsin(iπψ) i 1 2 middot middot middot 4
(18)
e longitudinal vibration equations are multiplied byϕj(ψ) and the lateral vibration equations are multiplied byφj(ψ) and then the longitudinal and lateral vibrationequations are integrated within ψ [0 1] respectively eordinary differential equations of the winding hoistingsystem can be obtained as
MQtt + CQt + KQ + P + F 0 (19)
where M C K P and F are the mass matrix dampingmatrix stiffness matrix coupled matrix of the generalizedcoordinate and generalized force matrix respectively esematrices are expressed as
M
Muc 0 0 0
0 Mwc 0 0
0 0 Muv 0
0 0 0 Mwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
C
Cuc 0 0 0
0 Cwc 0 0
0 0 Cuv 0
0 0 0 Cwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
K
Kuc 0 0 0
0 Kwc 0 0
0 0 Kuv 0
0 0 0 Kwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
P Puc Pwc Puv Pwv1113858 1113859T
F Fuc Fwc Fuv Fwv1113858 1113859T
Q Qtuc Qtwc Qtuv Qtwv1113858 1113859T
(20)
where Qt q1(t) q2(t) middot middot middot q4(t)1113858 1113859T is the generalized
coordinate vectore specific expressions of the mass matrix damping
matrix stiffness matrix coupled matrix of the general-ized coordinate and generalized force matrix are inAppendix
e ordinary differential equations of the windinghoisting system can be solved by the fourth-order RungendashKutta method and then generalized coordinates qwci(t) andqwvi(t) are obtained Combining (1) (16) and (17) thelateral vibration displacements of the catenary rope and thevertical rope can be obtained as
4 Shock and Vibration
wc(x t) 11139444
i1φi
xc
lc1113888 1113889qwci(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxc
lc1113888 1113889
wv(x t) 11139444
i1φi
xv
lv1113888 1113889qwvi(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxv
lv1113888 1113889
(21)
3 Numerical Simulations
e mathematical model can reflect the real dynamic be-havior of the hoisting system under axial wobbles of the headsheave and is likely to analyze and conclude dynamic re-sponses of the winding hoisting rope Model parameters ofthe winding hoister applied for numerical simulations areshown in Table 1
In this paper the dynamic responses of the hoisting ropeare analyzed when the winding hoist is lifting and loweringe motion curves of the winding hoist are shown inFigure 2
e first- second- and third-order axial wobble ampli-tudes of the head sheave are 0003m respectively To ensurethe safe operation of the mine hoist it is assumed that theloads of the mine hoist in lifting and lowering are equalAccording to the motion curves of the winding hoist thelateral vibration displacements at the midpoint of the hoistingrope under the axial wobbles of the head sheave are given
From Figures 3 and 4 it can be seen that the lateralvibration displacements of the catenary rope in lifting aresimilar to those in lowering is is because the length of thecatenary rope is constant e excitation function is posi-tively correlated with the axial wobble order of the headsheavee larger the order of the head sheave axial wobblesthe closer the large amplitudes of the lateral vibration of thecatenary rope to both ends
From Figures 5 and 6 it can be seen that the lateralvibration responses of the vertical rope in lifting are differentfrom those in lowering is is because the length of thevertical rope is variable is verifies that it is required toresearch dynamic behaviors of the hoisting system duringthe lifting and lowering process e larger the order of thehead sheave axial wobbles the closer the large amplitude ofthe lateral vibration of the vertical rope to the upper end ofthe well
is paper is to study the large displacement lateralvibration behaviors of the hoisting rope under the axialwobbles of the head sheave erefore based on the safetyand reliability the total lateral vibration displacements of thehoisting rope can be expressed as
wsum(x t) 11139443
m1wm(x t)
111386811138681113868111386811138681113868111386811138681113868
111386811138681113868111386811138681113868111386811138681113868 (22)
e total lateral vibration displacements of the cate-nary rope under axial wobbles of the head sheave areshown in Figures 7 and 8 e lateral vibration responsesof the catenary rope during the lifting process are sub-stantially the same as those during the lowering processerefore the total lateral vibration displacements of the
catenary rope in lifting are not much different from thosein lowering
e total lateral vibration displacements of the ver-tical rope under axial wobbles of the head sheave areshown in Figures 9 and 10 e lateral vibration responsesof the vertical rope during the lifting process are differentfrom those during the lowering process e total lateralvibration displacements of the vertical rope in loweringare about 17 times those in lifting is is because thelength of the vertical rope is variable with time elength of the vertical rope is greater than that of thecatenary rope us the total lateral vibration displace-ments of the vertical rope are larger than those of thecatenary rope
e total lateral vibration displacements and distanceproportions of the hoisting rope under different axial wobbleamplitudes of the head sheave are shown in Figures 11 and12 e axial wobble amplitudes of the head sheave arepositively correlated with the total lateral vibration dis-placements of the hoisting ropeis is the same as the actualoperation of the coal mine hoist erefore during themanufacture design and assembly of the head sheave it isnecessary to restrain axial wobble amplitudes of the headsheave in order to meet safety requirements of the coal minehoist According to the design requirements of the coal mineenterprise the lateral vibration displacements should beconstrained within the distance proportion 5 of themultirope winding hoist Taking the same type and similarsize of the double-rope winding hoist as an example thedistance between the two hoisting ropes is 5m when theaxial wobble amplitude of the head sheave is less than0006m the distance proportion of the catenary rope is lessthan 5 When the axial wobble amplitude of the headsheave is less than 0003m the distance proportion of thevertical rope is less than 5 erefore when the axialwobble amplitude of the head sheave is less than 0003m itcan meet the design requirements of the coal mineenterprise
Table 1 Winding hoist parameters
Parameters ValueHead sheave radius Rs (m) 25Head sheave moment of inertia Js (kgm2) 152 times 104Rope effective cross-sectional area A (m2) 19 times 10minus3Rope effective Youngrsquos modulus E (Nm2) 11 times 1011Rope linear density ρ (kgm) 853Vertical rope maximum depth L0 (m) 1580Catenary rope constant length lc (m) 80Total hoisting times t (s) 120Friction coefficient between hoisting rope and headsheave cs
05
Contact extent between hoisting rope and headsheave ls (m) 39
Angle between catenary rope and horizontal plane θ(rad) π4
Hoisted mass per rope mp (kg) 5 times 104Gravity acceleration g (ms2) 98Roller guide spring stiffness k (Nmiddotm) 58 times 105Roller guide damping c (Nmiddotsm) 8 times 104
Shock and Vibration 5
4 Conclusions
In this paper the nonlinear vibration behavior of thehoisting rope under the axial wobbles of the head sheave inthe coal mine winding hoist is studied e mathematicalmodel of the hoisting system is established by the Hamiltonprinciple and it can be solved by MATLAB simulation econclusions can be obtained as follows
(1) e lateral vibration displacements of the catenaryrope during lifting are substantially the same as thoseduring lowering e larger the order of the headsheave axial wobble the closer the large amplitudes
of the lateral vibration of the catenary rope to bothends However the lateral vibration displacements ofthe vertical rope during lifting are different fromthose during lowering e larger the order of thehead sheave axial wobble the closer the large am-plitude of the lateral vibration of the vertical rope tothe upper end of the well
(2) e total lateral vibration displacements of thecatenary rope in lifting are slightly different fromthose in lowering However the total lateral vibra-tion displacements of the vertical rope in loweringare larger than those in lifting In addition the total
0400800
12001600
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
LiftingLowering
(a)
LiftingLowering
ndash16ndash8
08
16
Velo
city
(ms
)
20 40 60 80 100 1200Time (s)
(b)
LiftingLowering
ndash1ndash05
005
1
Acce
lera
tion
(ms
2 )
20 40 60 80 100 1200Time (s)
(c)
Figure 2 Motion curves of the winding hoist
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
ndash004ndash002
0002004
(c)
Figure 3 Lateral vibration displacements at lc2 of the catenary rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
6 Shock and Vibration
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

lateral vibration of the elevator rope and the initial boundaryvalue problem of lateral displacements due to boundaryexcitation are given [11 12]
For dynamic behaviors of the hoisting rope in the coalmine hoisting system some researchers conducted the fol-lowing research e lateral vibration responses of the inclinecable and the longitudinal vibration responses of the verticalcable are researched through the Hamilton principle and themoving coordinate frame method [15 16] e dynamicbehaviors of the winding hoist under flexible guides arestudied based on the FDM e influences of conveyanceeccentricity and drum radius inconformity on the windinghoisting system are analyzed [17]e vibration characteristicsand control of thewinding cable through crossover areas in thecoal mine hoister are studied through the geometric method[18] e lateral vibration characteristics of the catenary ropein the multirope friction hoisting system are researched andverified by experiment [19]e dynamic characteristics of themine hoisting ropes with variable length and roller guides withthe diameter inconformity of drums are given by the Vd-FEMand Lagrangersquos equations e results show that the diameterinconformity of drums has a great influence on the tensiondeviation of the hoisting ropes [20] e coupled longitudinaland torsional vibration equations of the multicable hoistingsystem in mine construction are derived through the con-strained Lagrange equation e results of numerical calcu-lations are verified by Adams software [21]
From above literatures few literatures have studieddynamic behaviors of the winding hoisting rope under thehead sheave axial wobbles Axial wobbles of the head sheavecause periodic lateral vibrations of the winding hoistingrope e lateral and longitudinal vibrations of the windinghoisting rope are coupled to each other rough theHamilton principle the coupled lateral-longitudinal gov-erning equations of the winding hoisting rope under theaxial wobbles of the head sheave are obtainede governingequations are nonlinear infinite-dimensional partial differ-ential equations and the Galerkin method is applied todiscretize the governing equations into finite-dimensionalordinary differential equations e fourth-order RungendashKutta method has been applied to work out ordinary dif-ferential equations e numerical simulation and analysisare performed for the lateral vibration responses of thehoisting rope under the axial wobbles of the head sheavewhen the coal mine hoister is lifting or lowering
e remainder of the paper is given as follows In Section2 the mathematical model of the winding hoisting system isobtained and discretized In section 3 the numerical sim-ulation and analysis are performed for the dynamic re-sponses of the winding hoist rope under the axial wobbles ofthe head sheave In section 4 the conclusions are given
2 Mathematical Model of the WindingHoisting System
21 Axial Wobbles of the Head Sheave e axial wobblefrequency of the head sheave is mainly the first three ordersof periodic rotation frequencies [19] In this paper thefirst three orders of axial wobbles of the head sheave are
used as the excitations for the lateral vibration of thehoisting rope e excitation function of axial wobbles ofthe head sheave is
em(t) Bm sin mc(t)
Rs
t1113888 1113889 (1)
where Bm is the mth axial wobble amplitude of the headsheave (m 1 2 and 3) c(t) is the working velocity of thewinding hoist t is the hoisting time of the hoist and Rs is theradius of the head sheave
22 Description of the Mathematical Model Multiplehoisting ropes are parallel to each other in the hoistingsystem us multiple hoisting ropes are considered to bea hoisting rope as the research object e model ofa winding hoisting system is shown in Figure 1 It includesa drum a catenary rope a head sheave a vertical ropea conveyance spring dampers and roller guides
In this paper two coordinates of the reference areestablished e contact point between the drum and thecatenary rope is the reference system OcXcYc e contactpoint between the head sheave and the vertical rope is thereference system OvXvYv
In this paper lc0 lc1 lv0 and lv1 denote the contact pointof the catenary rope and the winding drum contact point ofthe catenary rope and the head sheave contact point of thevertical rope and the head sheave and contact point of thevertical rope and the conveyance respectively lc denotes theconstant length of the catenary rope lv(t) denotes the time-varying length of the vertical rope u(x t) andw(x t) denotethe longitudinal and lateral vibration displacements at x(t) ofthe hoisting rope respectively ρ is the linear density of thehoisting cable g is the gravity acceleration a is the workingacceleration E is Youngrsquos modulus of the hoisting rope A isthe effective cross-sectional area of the hoisting rope θ is theslope angle of the catenary rope and mp is the hoisted massper rope e subscripts t x c and v indicate the partialdifferential of t the partial differential of x catenary ropeand vertical rope respectively
e following assumptions are used to restrain the analysis(1) e hoisting rope material is uniform (2) e structureparameters of the hoisting rope remain invariant (3) e slipof the hoisting rope is ignored (4)e torsional and transverseout-of-plane vibration responses of the hoisting cable are ig-nored (5) e elastic displacements due to longitudinal andlateral vibrations are greatly smaller than the length of thehoisting rope (6) e effect of the air resistance is ignored
e mathematical model of the winding hoisting systemis obtained through the Hamilton principle e motion ofthe system between t t1 and t t2 is
1113946t2
t1
δEk minus δEp + δW1113872 1113873dt 0 (2)
where Ek Ep and δW denote the kinetic energy potentialenergy and virtual work of the winding hoisting systemrespectively For the sake of simplicity u(x t) w(x t) lc(t)lv(t) em(t) x(t) a(t) and c(t) indicate u w lc lv em x aand c respectively
2 Shock and Vibration
Equation (2) can be solved through the variationalprinciple and Leibnizrsquos rule erefore the coupled lateral-longitudinal governing equations of the hoisting system areobtained as follows
ρ Ωu + a( )minusTux minusEAΦux ρgb (3)
ρΩw minus TwxWx + TwWxx( )
minusEA ΦwxWx +ΦwWxx( ) 0(4)
where Ωu and Ωw are the dierential operator matrices ofthe longitudinal and lateral governing equations re-spectively Tu and Tw are the static tension matrices of thelongitudinal and lateral governing equations respectivelyΦu and Φw are the strain matrices of the longitudinal andlateral governing equations respectively W is the matrix oflateral vibration displacements a is the acceleration vectorand b is the column vector respectively ese matrices andvectors are expressed as
Tw Tc 0
0 Tv[ ]
Φw εc 0
0 εv[ ]
Ω Ωc Ωv[ ]T
Tu Tc Tv[ ]T
Φu εc εv[ ]T
W wc wv[ ]T
a a a[ ]T
b 1 1[ ]T
(5)
Equation (3) is the longitudinal governing equation ofthe hoisting rope in the winding hoisting system andequation (4) is the lateral governing equation of the hoistingrope in the winding hoisting system
e static tension of the hoisting rope is caused not onlyby the weight of the conveyance but also by its own weighterefore the static tension of the hoisting rope can beexpressed as
Tc(x t) mpg + ρ lv minus lc minusxc( )sin(θ)( )g
Tv(x t) mpg + ρ lv minus xv( )g(6)
where Tc(x t) is the static tension of the catenary rope andTv(x t) is the static tension of the vertical rope
e dierential operatorsΩu andΩw can be expressed as
Ωu utt + 2cuxt + aux + c2uxx
Ωw wtt + 2cwxt + awx + c2wxx(7)
According to Greenrsquos symmetric strain tensor thestrain of the catenary rope and vertical rope can beexpressed as
εc ucx + 05w2cx
εv uvx + 05w2vx
(8)
e initial boundary conditions of the winding hoistingsystem are given by
uc lc0 t( ) 0
wc lc0 t( ) 0(9)
e longitudinal and lateral boundary equations of thehoisting system at the head sheave are as follows
JsR2s
Ωuc1 + a( )minus cs c + uc1t( ) + EA εv0 minus εc1( ) 0 (10)
mpΩwd minusEAΦdWdx minus mpg + csc( )Wdx
minus csWdt em(11)
where Js is the inertia moment and cs is the friction co-ecient between the hoisting rope and the head sheave esubscripts c1 and v0 indicate the lc1 point and lv0 pointesematrices can be expressed as
Φd εc1 0
0 εv0
Ωwd Ωc1 Ωv0[ ]T
Wd wc1 wv0[ ]T
em em em[ ]T
(12)
e longitudinal vibration displacements of the cate-nary rope are transmitted to the vertical rope at the headsheavee longitudinal vibration displacement relationship
em(t)
Springdamper
c2
k2Rollerguide
xv(t)Xc
Xv
x c(t)
Yc
lv1
lc1ls
wv(x t)
wc(x t)uc(x t)
uv(x t)
lv(t)
Drum
Catenary
rope Head
sheave
Oc
Ov
Verticalrope
Yv
lv0
lc0
l c
Conveyance
Figure 1 Model of a winding hoisting system
Shock and Vibration 3
between the catenary rope and the vertical rope can beobtained by
uv0 uc1
ecsls (13)
e boundary equations of the hoisting system at theconveyance can be expressed as
mp Ωuv1 + a( 1113857 + EAεv1 + ρglv1 0 (14)
mpΩwv1 + EAεv1 + Tv1 + cc( 1113857wv1x
+ cwv1t + kwv1 0(15)
where k denotes spring stiffness of the roller guide and cdenotes spring damping of the roller guide e subscript v1indicates the lv1 point
Equations (14) and (15) are the longitudinal and lateralboundary equations of the hoisting system at the convey-ance respectively
23 Discretization of the Mathematical Model Lateralboundary equation of the hoisting system at the head sheaveis in a nonhomogeneous form It is necessary to change thenonhomogeneous equation to the homogeneous equationSuppose the lateral vibration displacements of the hoistingsystem can be expressed as
w(x t) y(x t) + em 1minusx
l1113874 1113875 (16)
where y(x t) is the homogeneous equation Insertingequation (16) into equations (4) (11) and (15) the coupledlateral-longitudinal infinite-dimensional nonlinear partialdifferential homogeneous equations of the hoisting rope areobtained and then the Galerkin method is used to discretizethem into the finite-dimensional ordinary differentialequations
To facilitate the analysis of the model a dependentvariable ψ xl is defined A domain [0 l] with x istransformed into a domain [0 1] with ψ Longitudinal andlateral vibration displacements of the hoisting rope can bedefined by
u(ψ t) 1113944n
i1ϕi(ψ)qui(t)
y(ψ t) 1113944n
i1φi(ψ)qwi(t)
(17)
where n is the order of truncation e fourth-orderGalerkin truncation is available which enables to obtainprecise numerical results [22] and thus n 4 qui(t) andqwi(t) are longitudinal and lateral generalized co-ordinates respectively ϕi(ψ) and φi(ψ) are longitudinaland lateral trail functions respectively and they can beexpressed as
ϕi(ψ) 2
radicsin
2iminus 12
πψ1113874 1113875 i 1 2 middot middot middot 4
φi(ψ) 2
radicsin(iπψ) i 1 2 middot middot middot 4
(18)
e longitudinal vibration equations are multiplied byϕj(ψ) and the lateral vibration equations are multiplied byφj(ψ) and then the longitudinal and lateral vibrationequations are integrated within ψ [0 1] respectively eordinary differential equations of the winding hoistingsystem can be obtained as
MQtt + CQt + KQ + P + F 0 (19)
where M C K P and F are the mass matrix dampingmatrix stiffness matrix coupled matrix of the generalizedcoordinate and generalized force matrix respectively esematrices are expressed as
M
Muc 0 0 0
0 Mwc 0 0
0 0 Muv 0
0 0 0 Mwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
C
Cuc 0 0 0
0 Cwc 0 0
0 0 Cuv 0
0 0 0 Cwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
K
Kuc 0 0 0
0 Kwc 0 0
0 0 Kuv 0
0 0 0 Kwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
P Puc Pwc Puv Pwv1113858 1113859T
F Fuc Fwc Fuv Fwv1113858 1113859T
Q Qtuc Qtwc Qtuv Qtwv1113858 1113859T
(20)
where Qt q1(t) q2(t) middot middot middot q4(t)1113858 1113859T is the generalized
coordinate vectore specific expressions of the mass matrix damping
matrix stiffness matrix coupled matrix of the general-ized coordinate and generalized force matrix are inAppendix
e ordinary differential equations of the windinghoisting system can be solved by the fourth-order RungendashKutta method and then generalized coordinates qwci(t) andqwvi(t) are obtained Combining (1) (16) and (17) thelateral vibration displacements of the catenary rope and thevertical rope can be obtained as
4 Shock and Vibration
wc(x t) 11139444
i1φi
xc
lc1113888 1113889qwci(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxc
lc1113888 1113889
wv(x t) 11139444
i1φi
xv
lv1113888 1113889qwvi(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxv
lv1113888 1113889
(21)
3 Numerical Simulations
e mathematical model can reflect the real dynamic be-havior of the hoisting system under axial wobbles of the headsheave and is likely to analyze and conclude dynamic re-sponses of the winding hoisting rope Model parameters ofthe winding hoister applied for numerical simulations areshown in Table 1
In this paper the dynamic responses of the hoisting ropeare analyzed when the winding hoist is lifting and loweringe motion curves of the winding hoist are shown inFigure 2
e first- second- and third-order axial wobble ampli-tudes of the head sheave are 0003m respectively To ensurethe safe operation of the mine hoist it is assumed that theloads of the mine hoist in lifting and lowering are equalAccording to the motion curves of the winding hoist thelateral vibration displacements at the midpoint of the hoistingrope under the axial wobbles of the head sheave are given
From Figures 3 and 4 it can be seen that the lateralvibration displacements of the catenary rope in lifting aresimilar to those in lowering is is because the length of thecatenary rope is constant e excitation function is posi-tively correlated with the axial wobble order of the headsheavee larger the order of the head sheave axial wobblesthe closer the large amplitudes of the lateral vibration of thecatenary rope to both ends
From Figures 5 and 6 it can be seen that the lateralvibration responses of the vertical rope in lifting are differentfrom those in lowering is is because the length of thevertical rope is variable is verifies that it is required toresearch dynamic behaviors of the hoisting system duringthe lifting and lowering process e larger the order of thehead sheave axial wobbles the closer the large amplitude ofthe lateral vibration of the vertical rope to the upper end ofthe well
is paper is to study the large displacement lateralvibration behaviors of the hoisting rope under the axialwobbles of the head sheave erefore based on the safetyand reliability the total lateral vibration displacements of thehoisting rope can be expressed as
wsum(x t) 11139443
m1wm(x t)
111386811138681113868111386811138681113868111386811138681113868
111386811138681113868111386811138681113868111386811138681113868 (22)
e total lateral vibration displacements of the cate-nary rope under axial wobbles of the head sheave areshown in Figures 7 and 8 e lateral vibration responsesof the catenary rope during the lifting process are sub-stantially the same as those during the lowering processerefore the total lateral vibration displacements of the
catenary rope in lifting are not much different from thosein lowering
e total lateral vibration displacements of the ver-tical rope under axial wobbles of the head sheave areshown in Figures 9 and 10 e lateral vibration responsesof the vertical rope during the lifting process are differentfrom those during the lowering process e total lateralvibration displacements of the vertical rope in loweringare about 17 times those in lifting is is because thelength of the vertical rope is variable with time elength of the vertical rope is greater than that of thecatenary rope us the total lateral vibration displace-ments of the vertical rope are larger than those of thecatenary rope
e total lateral vibration displacements and distanceproportions of the hoisting rope under different axial wobbleamplitudes of the head sheave are shown in Figures 11 and12 e axial wobble amplitudes of the head sheave arepositively correlated with the total lateral vibration dis-placements of the hoisting ropeis is the same as the actualoperation of the coal mine hoist erefore during themanufacture design and assembly of the head sheave it isnecessary to restrain axial wobble amplitudes of the headsheave in order to meet safety requirements of the coal minehoist According to the design requirements of the coal mineenterprise the lateral vibration displacements should beconstrained within the distance proportion 5 of themultirope winding hoist Taking the same type and similarsize of the double-rope winding hoist as an example thedistance between the two hoisting ropes is 5m when theaxial wobble amplitude of the head sheave is less than0006m the distance proportion of the catenary rope is lessthan 5 When the axial wobble amplitude of the headsheave is less than 0003m the distance proportion of thevertical rope is less than 5 erefore when the axialwobble amplitude of the head sheave is less than 0003m itcan meet the design requirements of the coal mineenterprise
Table 1 Winding hoist parameters
Parameters ValueHead sheave radius Rs (m) 25Head sheave moment of inertia Js (kgm2) 152 times 104Rope effective cross-sectional area A (m2) 19 times 10minus3Rope effective Youngrsquos modulus E (Nm2) 11 times 1011Rope linear density ρ (kgm) 853Vertical rope maximum depth L0 (m) 1580Catenary rope constant length lc (m) 80Total hoisting times t (s) 120Friction coefficient between hoisting rope and headsheave cs
05
Contact extent between hoisting rope and headsheave ls (m) 39
Angle between catenary rope and horizontal plane θ(rad) π4
Hoisted mass per rope mp (kg) 5 times 104Gravity acceleration g (ms2) 98Roller guide spring stiffness k (Nmiddotm) 58 times 105Roller guide damping c (Nmiddotsm) 8 times 104
Shock and Vibration 5
4 Conclusions
In this paper the nonlinear vibration behavior of thehoisting rope under the axial wobbles of the head sheave inthe coal mine winding hoist is studied e mathematicalmodel of the hoisting system is established by the Hamiltonprinciple and it can be solved by MATLAB simulation econclusions can be obtained as follows
(1) e lateral vibration displacements of the catenaryrope during lifting are substantially the same as thoseduring lowering e larger the order of the headsheave axial wobble the closer the large amplitudes
of the lateral vibration of the catenary rope to bothends However the lateral vibration displacements ofthe vertical rope during lifting are different fromthose during lowering e larger the order of thehead sheave axial wobble the closer the large am-plitude of the lateral vibration of the vertical rope tothe upper end of the well
(2) e total lateral vibration displacements of thecatenary rope in lifting are slightly different fromthose in lowering However the total lateral vibra-tion displacements of the vertical rope in loweringare larger than those in lifting In addition the total
0400800
12001600
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
LiftingLowering
(a)
LiftingLowering
ndash16ndash8
08
16
Velo
city
(ms
)
20 40 60 80 100 1200Time (s)
(b)
LiftingLowering
ndash1ndash05
005
1
Acce
lera
tion
(ms
2 )
20 40 60 80 100 1200Time (s)
(c)
Figure 2 Motion curves of the winding hoist
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
ndash004ndash002
0002004
(c)
Figure 3 Lateral vibration displacements at lc2 of the catenary rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
6 Shock and Vibration
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Equation (2) can be solved through the variationalprinciple and Leibnizrsquos rule erefore the coupled lateral-longitudinal governing equations of the hoisting system areobtained as follows
ρ Ωu + a( )minusTux minusEAΦux ρgb (3)
ρΩw minus TwxWx + TwWxx( )
minusEA ΦwxWx +ΦwWxx( ) 0(4)
where Ωu and Ωw are the dierential operator matrices ofthe longitudinal and lateral governing equations re-spectively Tu and Tw are the static tension matrices of thelongitudinal and lateral governing equations respectivelyΦu and Φw are the strain matrices of the longitudinal andlateral governing equations respectively W is the matrix oflateral vibration displacements a is the acceleration vectorand b is the column vector respectively ese matrices andvectors are expressed as
Tw Tc 0
0 Tv[ ]
Φw εc 0
0 εv[ ]
Ω Ωc Ωv[ ]T
Tu Tc Tv[ ]T
Φu εc εv[ ]T
W wc wv[ ]T
a a a[ ]T
b 1 1[ ]T
(5)
Equation (3) is the longitudinal governing equation ofthe hoisting rope in the winding hoisting system andequation (4) is the lateral governing equation of the hoistingrope in the winding hoisting system
e static tension of the hoisting rope is caused not onlyby the weight of the conveyance but also by its own weighterefore the static tension of the hoisting rope can beexpressed as
Tc(x t) mpg + ρ lv minus lc minusxc( )sin(θ)( )g
Tv(x t) mpg + ρ lv minus xv( )g(6)
where Tc(x t) is the static tension of the catenary rope andTv(x t) is the static tension of the vertical rope
e dierential operatorsΩu andΩw can be expressed as
Ωu utt + 2cuxt + aux + c2uxx
Ωw wtt + 2cwxt + awx + c2wxx(7)
According to Greenrsquos symmetric strain tensor thestrain of the catenary rope and vertical rope can beexpressed as
εc ucx + 05w2cx
εv uvx + 05w2vx
(8)
e initial boundary conditions of the winding hoistingsystem are given by
uc lc0 t( ) 0
wc lc0 t( ) 0(9)
e longitudinal and lateral boundary equations of thehoisting system at the head sheave are as follows
JsR2s
Ωuc1 + a( )minus cs c + uc1t( ) + EA εv0 minus εc1( ) 0 (10)
mpΩwd minusEAΦdWdx minus mpg + csc( )Wdx
minus csWdt em(11)
where Js is the inertia moment and cs is the friction co-ecient between the hoisting rope and the head sheave esubscripts c1 and v0 indicate the lc1 point and lv0 pointesematrices can be expressed as
Φd εc1 0
0 εv0
Ωwd Ωc1 Ωv0[ ]T
Wd wc1 wv0[ ]T
em em em[ ]T
(12)
e longitudinal vibration displacements of the cate-nary rope are transmitted to the vertical rope at the headsheavee longitudinal vibration displacement relationship
em(t)
Springdamper
c2
k2Rollerguide
xv(t)Xc
Xv
x c(t)
Yc
lv1
lc1ls
wv(x t)
wc(x t)uc(x t)
uv(x t)
lv(t)
Drum
Catenary
rope Head
sheave
Oc
Ov
Verticalrope
Yv
lv0
lc0
l c
Conveyance
Figure 1 Model of a winding hoisting system
Shock and Vibration 3
between the catenary rope and the vertical rope can beobtained by
uv0 uc1
ecsls (13)
e boundary equations of the hoisting system at theconveyance can be expressed as
mp Ωuv1 + a( 1113857 + EAεv1 + ρglv1 0 (14)
mpΩwv1 + EAεv1 + Tv1 + cc( 1113857wv1x
+ cwv1t + kwv1 0(15)
where k denotes spring stiffness of the roller guide and cdenotes spring damping of the roller guide e subscript v1indicates the lv1 point
Equations (14) and (15) are the longitudinal and lateralboundary equations of the hoisting system at the convey-ance respectively
23 Discretization of the Mathematical Model Lateralboundary equation of the hoisting system at the head sheaveis in a nonhomogeneous form It is necessary to change thenonhomogeneous equation to the homogeneous equationSuppose the lateral vibration displacements of the hoistingsystem can be expressed as
w(x t) y(x t) + em 1minusx
l1113874 1113875 (16)
where y(x t) is the homogeneous equation Insertingequation (16) into equations (4) (11) and (15) the coupledlateral-longitudinal infinite-dimensional nonlinear partialdifferential homogeneous equations of the hoisting rope areobtained and then the Galerkin method is used to discretizethem into the finite-dimensional ordinary differentialequations
To facilitate the analysis of the model a dependentvariable ψ xl is defined A domain [0 l] with x istransformed into a domain [0 1] with ψ Longitudinal andlateral vibration displacements of the hoisting rope can bedefined by
u(ψ t) 1113944n
i1ϕi(ψ)qui(t)
y(ψ t) 1113944n
i1φi(ψ)qwi(t)
(17)
where n is the order of truncation e fourth-orderGalerkin truncation is available which enables to obtainprecise numerical results [22] and thus n 4 qui(t) andqwi(t) are longitudinal and lateral generalized co-ordinates respectively ϕi(ψ) and φi(ψ) are longitudinaland lateral trail functions respectively and they can beexpressed as
ϕi(ψ) 2
radicsin
2iminus 12
πψ1113874 1113875 i 1 2 middot middot middot 4
φi(ψ) 2
radicsin(iπψ) i 1 2 middot middot middot 4
(18)
e longitudinal vibration equations are multiplied byϕj(ψ) and the lateral vibration equations are multiplied byφj(ψ) and then the longitudinal and lateral vibrationequations are integrated within ψ [0 1] respectively eordinary differential equations of the winding hoistingsystem can be obtained as
MQtt + CQt + KQ + P + F 0 (19)
where M C K P and F are the mass matrix dampingmatrix stiffness matrix coupled matrix of the generalizedcoordinate and generalized force matrix respectively esematrices are expressed as
M
Muc 0 0 0
0 Mwc 0 0
0 0 Muv 0
0 0 0 Mwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
C
Cuc 0 0 0
0 Cwc 0 0
0 0 Cuv 0
0 0 0 Cwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
K
Kuc 0 0 0
0 Kwc 0 0
0 0 Kuv 0
0 0 0 Kwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
P Puc Pwc Puv Pwv1113858 1113859T
F Fuc Fwc Fuv Fwv1113858 1113859T
Q Qtuc Qtwc Qtuv Qtwv1113858 1113859T
(20)
where Qt q1(t) q2(t) middot middot middot q4(t)1113858 1113859T is the generalized
coordinate vectore specific expressions of the mass matrix damping
matrix stiffness matrix coupled matrix of the general-ized coordinate and generalized force matrix are inAppendix
e ordinary differential equations of the windinghoisting system can be solved by the fourth-order RungendashKutta method and then generalized coordinates qwci(t) andqwvi(t) are obtained Combining (1) (16) and (17) thelateral vibration displacements of the catenary rope and thevertical rope can be obtained as
4 Shock and Vibration
wc(x t) 11139444
i1φi
xc
lc1113888 1113889qwci(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxc
lc1113888 1113889
wv(x t) 11139444
i1φi
xv
lv1113888 1113889qwvi(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxv
lv1113888 1113889
(21)
3 Numerical Simulations
e mathematical model can reflect the real dynamic be-havior of the hoisting system under axial wobbles of the headsheave and is likely to analyze and conclude dynamic re-sponses of the winding hoisting rope Model parameters ofthe winding hoister applied for numerical simulations areshown in Table 1
In this paper the dynamic responses of the hoisting ropeare analyzed when the winding hoist is lifting and loweringe motion curves of the winding hoist are shown inFigure 2
e first- second- and third-order axial wobble ampli-tudes of the head sheave are 0003m respectively To ensurethe safe operation of the mine hoist it is assumed that theloads of the mine hoist in lifting and lowering are equalAccording to the motion curves of the winding hoist thelateral vibration displacements at the midpoint of the hoistingrope under the axial wobbles of the head sheave are given
From Figures 3 and 4 it can be seen that the lateralvibration displacements of the catenary rope in lifting aresimilar to those in lowering is is because the length of thecatenary rope is constant e excitation function is posi-tively correlated with the axial wobble order of the headsheavee larger the order of the head sheave axial wobblesthe closer the large amplitudes of the lateral vibration of thecatenary rope to both ends
From Figures 5 and 6 it can be seen that the lateralvibration responses of the vertical rope in lifting are differentfrom those in lowering is is because the length of thevertical rope is variable is verifies that it is required toresearch dynamic behaviors of the hoisting system duringthe lifting and lowering process e larger the order of thehead sheave axial wobbles the closer the large amplitude ofthe lateral vibration of the vertical rope to the upper end ofthe well
is paper is to study the large displacement lateralvibration behaviors of the hoisting rope under the axialwobbles of the head sheave erefore based on the safetyand reliability the total lateral vibration displacements of thehoisting rope can be expressed as
wsum(x t) 11139443
m1wm(x t)
111386811138681113868111386811138681113868111386811138681113868
111386811138681113868111386811138681113868111386811138681113868 (22)
e total lateral vibration displacements of the cate-nary rope under axial wobbles of the head sheave areshown in Figures 7 and 8 e lateral vibration responsesof the catenary rope during the lifting process are sub-stantially the same as those during the lowering processerefore the total lateral vibration displacements of the
catenary rope in lifting are not much different from thosein lowering
e total lateral vibration displacements of the ver-tical rope under axial wobbles of the head sheave areshown in Figures 9 and 10 e lateral vibration responsesof the vertical rope during the lifting process are differentfrom those during the lowering process e total lateralvibration displacements of the vertical rope in loweringare about 17 times those in lifting is is because thelength of the vertical rope is variable with time elength of the vertical rope is greater than that of thecatenary rope us the total lateral vibration displace-ments of the vertical rope are larger than those of thecatenary rope
e total lateral vibration displacements and distanceproportions of the hoisting rope under different axial wobbleamplitudes of the head sheave are shown in Figures 11 and12 e axial wobble amplitudes of the head sheave arepositively correlated with the total lateral vibration dis-placements of the hoisting ropeis is the same as the actualoperation of the coal mine hoist erefore during themanufacture design and assembly of the head sheave it isnecessary to restrain axial wobble amplitudes of the headsheave in order to meet safety requirements of the coal minehoist According to the design requirements of the coal mineenterprise the lateral vibration displacements should beconstrained within the distance proportion 5 of themultirope winding hoist Taking the same type and similarsize of the double-rope winding hoist as an example thedistance between the two hoisting ropes is 5m when theaxial wobble amplitude of the head sheave is less than0006m the distance proportion of the catenary rope is lessthan 5 When the axial wobble amplitude of the headsheave is less than 0003m the distance proportion of thevertical rope is less than 5 erefore when the axialwobble amplitude of the head sheave is less than 0003m itcan meet the design requirements of the coal mineenterprise
Table 1 Winding hoist parameters
Parameters ValueHead sheave radius Rs (m) 25Head sheave moment of inertia Js (kgm2) 152 times 104Rope effective cross-sectional area A (m2) 19 times 10minus3Rope effective Youngrsquos modulus E (Nm2) 11 times 1011Rope linear density ρ (kgm) 853Vertical rope maximum depth L0 (m) 1580Catenary rope constant length lc (m) 80Total hoisting times t (s) 120Friction coefficient between hoisting rope and headsheave cs
05
Contact extent between hoisting rope and headsheave ls (m) 39
Angle between catenary rope and horizontal plane θ(rad) π4
Hoisted mass per rope mp (kg) 5 times 104Gravity acceleration g (ms2) 98Roller guide spring stiffness k (Nmiddotm) 58 times 105Roller guide damping c (Nmiddotsm) 8 times 104
Shock and Vibration 5
4 Conclusions
In this paper the nonlinear vibration behavior of thehoisting rope under the axial wobbles of the head sheave inthe coal mine winding hoist is studied e mathematicalmodel of the hoisting system is established by the Hamiltonprinciple and it can be solved by MATLAB simulation econclusions can be obtained as follows
(1) e lateral vibration displacements of the catenaryrope during lifting are substantially the same as thoseduring lowering e larger the order of the headsheave axial wobble the closer the large amplitudes
of the lateral vibration of the catenary rope to bothends However the lateral vibration displacements ofthe vertical rope during lifting are different fromthose during lowering e larger the order of thehead sheave axial wobble the closer the large am-plitude of the lateral vibration of the vertical rope tothe upper end of the well
(2) e total lateral vibration displacements of thecatenary rope in lifting are slightly different fromthose in lowering However the total lateral vibra-tion displacements of the vertical rope in loweringare larger than those in lifting In addition the total
0400800
12001600
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
LiftingLowering
(a)
LiftingLowering
ndash16ndash8
08
16
Velo
city
(ms
)
20 40 60 80 100 1200Time (s)
(b)
LiftingLowering
ndash1ndash05
005
1
Acce
lera
tion
(ms
2 )
20 40 60 80 100 1200Time (s)
(c)
Figure 2 Motion curves of the winding hoist
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
ndash004ndash002
0002004
(c)
Figure 3 Lateral vibration displacements at lc2 of the catenary rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
6 Shock and Vibration
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

between the catenary rope and the vertical rope can beobtained by
uv0 uc1
ecsls (13)
e boundary equations of the hoisting system at theconveyance can be expressed as
mp Ωuv1 + a( 1113857 + EAεv1 + ρglv1 0 (14)
mpΩwv1 + EAεv1 + Tv1 + cc( 1113857wv1x
+ cwv1t + kwv1 0(15)
where k denotes spring stiffness of the roller guide and cdenotes spring damping of the roller guide e subscript v1indicates the lv1 point
Equations (14) and (15) are the longitudinal and lateralboundary equations of the hoisting system at the convey-ance respectively
23 Discretization of the Mathematical Model Lateralboundary equation of the hoisting system at the head sheaveis in a nonhomogeneous form It is necessary to change thenonhomogeneous equation to the homogeneous equationSuppose the lateral vibration displacements of the hoistingsystem can be expressed as
w(x t) y(x t) + em 1minusx
l1113874 1113875 (16)
where y(x t) is the homogeneous equation Insertingequation (16) into equations (4) (11) and (15) the coupledlateral-longitudinal infinite-dimensional nonlinear partialdifferential homogeneous equations of the hoisting rope areobtained and then the Galerkin method is used to discretizethem into the finite-dimensional ordinary differentialequations
To facilitate the analysis of the model a dependentvariable ψ xl is defined A domain [0 l] with x istransformed into a domain [0 1] with ψ Longitudinal andlateral vibration displacements of the hoisting rope can bedefined by
u(ψ t) 1113944n
i1ϕi(ψ)qui(t)
y(ψ t) 1113944n
i1φi(ψ)qwi(t)
(17)
where n is the order of truncation e fourth-orderGalerkin truncation is available which enables to obtainprecise numerical results [22] and thus n 4 qui(t) andqwi(t) are longitudinal and lateral generalized co-ordinates respectively ϕi(ψ) and φi(ψ) are longitudinaland lateral trail functions respectively and they can beexpressed as
ϕi(ψ) 2
radicsin
2iminus 12
πψ1113874 1113875 i 1 2 middot middot middot 4
φi(ψ) 2
radicsin(iπψ) i 1 2 middot middot middot 4
(18)
e longitudinal vibration equations are multiplied byϕj(ψ) and the lateral vibration equations are multiplied byφj(ψ) and then the longitudinal and lateral vibrationequations are integrated within ψ [0 1] respectively eordinary differential equations of the winding hoistingsystem can be obtained as
MQtt + CQt + KQ + P + F 0 (19)
where M C K P and F are the mass matrix dampingmatrix stiffness matrix coupled matrix of the generalizedcoordinate and generalized force matrix respectively esematrices are expressed as
M
Muc 0 0 0
0 Mwc 0 0
0 0 Muv 0
0 0 0 Mwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
C
Cuc 0 0 0
0 Cwc 0 0
0 0 Cuv 0
0 0 0 Cwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
K
Kuc 0 0 0
0 Kwc 0 0
0 0 Kuv 0
0 0 0 Kwv
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦
P Puc Pwc Puv Pwv1113858 1113859T
F Fuc Fwc Fuv Fwv1113858 1113859T
Q Qtuc Qtwc Qtuv Qtwv1113858 1113859T
(20)
where Qt q1(t) q2(t) middot middot middot q4(t)1113858 1113859T is the generalized
coordinate vectore specific expressions of the mass matrix damping
matrix stiffness matrix coupled matrix of the general-ized coordinate and generalized force matrix are inAppendix
e ordinary differential equations of the windinghoisting system can be solved by the fourth-order RungendashKutta method and then generalized coordinates qwci(t) andqwvi(t) are obtained Combining (1) (16) and (17) thelateral vibration displacements of the catenary rope and thevertical rope can be obtained as
4 Shock and Vibration
wc(x t) 11139444
i1φi
xc
lc1113888 1113889qwci(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxc
lc1113888 1113889
wv(x t) 11139444
i1φi
xv
lv1113888 1113889qwvi(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxv
lv1113888 1113889
(21)
3 Numerical Simulations
e mathematical model can reflect the real dynamic be-havior of the hoisting system under axial wobbles of the headsheave and is likely to analyze and conclude dynamic re-sponses of the winding hoisting rope Model parameters ofthe winding hoister applied for numerical simulations areshown in Table 1
In this paper the dynamic responses of the hoisting ropeare analyzed when the winding hoist is lifting and loweringe motion curves of the winding hoist are shown inFigure 2
e first- second- and third-order axial wobble ampli-tudes of the head sheave are 0003m respectively To ensurethe safe operation of the mine hoist it is assumed that theloads of the mine hoist in lifting and lowering are equalAccording to the motion curves of the winding hoist thelateral vibration displacements at the midpoint of the hoistingrope under the axial wobbles of the head sheave are given
From Figures 3 and 4 it can be seen that the lateralvibration displacements of the catenary rope in lifting aresimilar to those in lowering is is because the length of thecatenary rope is constant e excitation function is posi-tively correlated with the axial wobble order of the headsheavee larger the order of the head sheave axial wobblesthe closer the large amplitudes of the lateral vibration of thecatenary rope to both ends
From Figures 5 and 6 it can be seen that the lateralvibration responses of the vertical rope in lifting are differentfrom those in lowering is is because the length of thevertical rope is variable is verifies that it is required toresearch dynamic behaviors of the hoisting system duringthe lifting and lowering process e larger the order of thehead sheave axial wobbles the closer the large amplitude ofthe lateral vibration of the vertical rope to the upper end ofthe well
is paper is to study the large displacement lateralvibration behaviors of the hoisting rope under the axialwobbles of the head sheave erefore based on the safetyand reliability the total lateral vibration displacements of thehoisting rope can be expressed as
wsum(x t) 11139443
m1wm(x t)
111386811138681113868111386811138681113868111386811138681113868
111386811138681113868111386811138681113868111386811138681113868 (22)
e total lateral vibration displacements of the cate-nary rope under axial wobbles of the head sheave areshown in Figures 7 and 8 e lateral vibration responsesof the catenary rope during the lifting process are sub-stantially the same as those during the lowering processerefore the total lateral vibration displacements of the
catenary rope in lifting are not much different from thosein lowering
e total lateral vibration displacements of the ver-tical rope under axial wobbles of the head sheave areshown in Figures 9 and 10 e lateral vibration responsesof the vertical rope during the lifting process are differentfrom those during the lowering process e total lateralvibration displacements of the vertical rope in loweringare about 17 times those in lifting is is because thelength of the vertical rope is variable with time elength of the vertical rope is greater than that of thecatenary rope us the total lateral vibration displace-ments of the vertical rope are larger than those of thecatenary rope
e total lateral vibration displacements and distanceproportions of the hoisting rope under different axial wobbleamplitudes of the head sheave are shown in Figures 11 and12 e axial wobble amplitudes of the head sheave arepositively correlated with the total lateral vibration dis-placements of the hoisting ropeis is the same as the actualoperation of the coal mine hoist erefore during themanufacture design and assembly of the head sheave it isnecessary to restrain axial wobble amplitudes of the headsheave in order to meet safety requirements of the coal minehoist According to the design requirements of the coal mineenterprise the lateral vibration displacements should beconstrained within the distance proportion 5 of themultirope winding hoist Taking the same type and similarsize of the double-rope winding hoist as an example thedistance between the two hoisting ropes is 5m when theaxial wobble amplitude of the head sheave is less than0006m the distance proportion of the catenary rope is lessthan 5 When the axial wobble amplitude of the headsheave is less than 0003m the distance proportion of thevertical rope is less than 5 erefore when the axialwobble amplitude of the head sheave is less than 0003m itcan meet the design requirements of the coal mineenterprise
Table 1 Winding hoist parameters
Parameters ValueHead sheave radius Rs (m) 25Head sheave moment of inertia Js (kgm2) 152 times 104Rope effective cross-sectional area A (m2) 19 times 10minus3Rope effective Youngrsquos modulus E (Nm2) 11 times 1011Rope linear density ρ (kgm) 853Vertical rope maximum depth L0 (m) 1580Catenary rope constant length lc (m) 80Total hoisting times t (s) 120Friction coefficient between hoisting rope and headsheave cs
05
Contact extent between hoisting rope and headsheave ls (m) 39
Angle between catenary rope and horizontal plane θ(rad) π4
Hoisted mass per rope mp (kg) 5 times 104Gravity acceleration g (ms2) 98Roller guide spring stiffness k (Nmiddotm) 58 times 105Roller guide damping c (Nmiddotsm) 8 times 104
Shock and Vibration 5
4 Conclusions
In this paper the nonlinear vibration behavior of thehoisting rope under the axial wobbles of the head sheave inthe coal mine winding hoist is studied e mathematicalmodel of the hoisting system is established by the Hamiltonprinciple and it can be solved by MATLAB simulation econclusions can be obtained as follows
(1) e lateral vibration displacements of the catenaryrope during lifting are substantially the same as thoseduring lowering e larger the order of the headsheave axial wobble the closer the large amplitudes
of the lateral vibration of the catenary rope to bothends However the lateral vibration displacements ofthe vertical rope during lifting are different fromthose during lowering e larger the order of thehead sheave axial wobble the closer the large am-plitude of the lateral vibration of the vertical rope tothe upper end of the well
(2) e total lateral vibration displacements of thecatenary rope in lifting are slightly different fromthose in lowering However the total lateral vibra-tion displacements of the vertical rope in loweringare larger than those in lifting In addition the total
0400800
12001600
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
LiftingLowering
(a)
LiftingLowering
ndash16ndash8
08
16
Velo
city
(ms
)
20 40 60 80 100 1200Time (s)
(b)
LiftingLowering
ndash1ndash05
005
1
Acce
lera
tion
(ms
2 )
20 40 60 80 100 1200Time (s)
(c)
Figure 2 Motion curves of the winding hoist
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
ndash004ndash002
0002004
(c)
Figure 3 Lateral vibration displacements at lc2 of the catenary rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
6 Shock and Vibration
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

wc(x t) 11139444
i1φi
xc
lc1113888 1113889qwci(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxc
lc1113888 1113889
wv(x t) 11139444
i1φi
xv
lv1113888 1113889qwvi(t) + Bm sin m
c
Rs
t1113888 1113889 1minusxv
lv1113888 1113889
(21)
3 Numerical Simulations
e mathematical model can reflect the real dynamic be-havior of the hoisting system under axial wobbles of the headsheave and is likely to analyze and conclude dynamic re-sponses of the winding hoisting rope Model parameters ofthe winding hoister applied for numerical simulations areshown in Table 1
In this paper the dynamic responses of the hoisting ropeare analyzed when the winding hoist is lifting and loweringe motion curves of the winding hoist are shown inFigure 2
e first- second- and third-order axial wobble ampli-tudes of the head sheave are 0003m respectively To ensurethe safe operation of the mine hoist it is assumed that theloads of the mine hoist in lifting and lowering are equalAccording to the motion curves of the winding hoist thelateral vibration displacements at the midpoint of the hoistingrope under the axial wobbles of the head sheave are given
From Figures 3 and 4 it can be seen that the lateralvibration displacements of the catenary rope in lifting aresimilar to those in lowering is is because the length of thecatenary rope is constant e excitation function is posi-tively correlated with the axial wobble order of the headsheavee larger the order of the head sheave axial wobblesthe closer the large amplitudes of the lateral vibration of thecatenary rope to both ends
From Figures 5 and 6 it can be seen that the lateralvibration responses of the vertical rope in lifting are differentfrom those in lowering is is because the length of thevertical rope is variable is verifies that it is required toresearch dynamic behaviors of the hoisting system duringthe lifting and lowering process e larger the order of thehead sheave axial wobbles the closer the large amplitude ofthe lateral vibration of the vertical rope to the upper end ofthe well
is paper is to study the large displacement lateralvibration behaviors of the hoisting rope under the axialwobbles of the head sheave erefore based on the safetyand reliability the total lateral vibration displacements of thehoisting rope can be expressed as
wsum(x t) 11139443
m1wm(x t)
111386811138681113868111386811138681113868111386811138681113868
111386811138681113868111386811138681113868111386811138681113868 (22)
e total lateral vibration displacements of the cate-nary rope under axial wobbles of the head sheave areshown in Figures 7 and 8 e lateral vibration responsesof the catenary rope during the lifting process are sub-stantially the same as those during the lowering processerefore the total lateral vibration displacements of the
catenary rope in lifting are not much different from thosein lowering
e total lateral vibration displacements of the ver-tical rope under axial wobbles of the head sheave areshown in Figures 9 and 10 e lateral vibration responsesof the vertical rope during the lifting process are differentfrom those during the lowering process e total lateralvibration displacements of the vertical rope in loweringare about 17 times those in lifting is is because thelength of the vertical rope is variable with time elength of the vertical rope is greater than that of thecatenary rope us the total lateral vibration displace-ments of the vertical rope are larger than those of thecatenary rope
e total lateral vibration displacements and distanceproportions of the hoisting rope under different axial wobbleamplitudes of the head sheave are shown in Figures 11 and12 e axial wobble amplitudes of the head sheave arepositively correlated with the total lateral vibration dis-placements of the hoisting ropeis is the same as the actualoperation of the coal mine hoist erefore during themanufacture design and assembly of the head sheave it isnecessary to restrain axial wobble amplitudes of the headsheave in order to meet safety requirements of the coal minehoist According to the design requirements of the coal mineenterprise the lateral vibration displacements should beconstrained within the distance proportion 5 of themultirope winding hoist Taking the same type and similarsize of the double-rope winding hoist as an example thedistance between the two hoisting ropes is 5m when theaxial wobble amplitude of the head sheave is less than0006m the distance proportion of the catenary rope is lessthan 5 When the axial wobble amplitude of the headsheave is less than 0003m the distance proportion of thevertical rope is less than 5 erefore when the axialwobble amplitude of the head sheave is less than 0003m itcan meet the design requirements of the coal mineenterprise
Table 1 Winding hoist parameters
Parameters ValueHead sheave radius Rs (m) 25Head sheave moment of inertia Js (kgm2) 152 times 104Rope effective cross-sectional area A (m2) 19 times 10minus3Rope effective Youngrsquos modulus E (Nm2) 11 times 1011Rope linear density ρ (kgm) 853Vertical rope maximum depth L0 (m) 1580Catenary rope constant length lc (m) 80Total hoisting times t (s) 120Friction coefficient between hoisting rope and headsheave cs
05
Contact extent between hoisting rope and headsheave ls (m) 39
Angle between catenary rope and horizontal plane θ(rad) π4
Hoisted mass per rope mp (kg) 5 times 104Gravity acceleration g (ms2) 98Roller guide spring stiffness k (Nmiddotm) 58 times 105Roller guide damping c (Nmiddotsm) 8 times 104
Shock and Vibration 5
4 Conclusions
In this paper the nonlinear vibration behavior of thehoisting rope under the axial wobbles of the head sheave inthe coal mine winding hoist is studied e mathematicalmodel of the hoisting system is established by the Hamiltonprinciple and it can be solved by MATLAB simulation econclusions can be obtained as follows
(1) e lateral vibration displacements of the catenaryrope during lifting are substantially the same as thoseduring lowering e larger the order of the headsheave axial wobble the closer the large amplitudes
of the lateral vibration of the catenary rope to bothends However the lateral vibration displacements ofthe vertical rope during lifting are different fromthose during lowering e larger the order of thehead sheave axial wobble the closer the large am-plitude of the lateral vibration of the vertical rope tothe upper end of the well
(2) e total lateral vibration displacements of thecatenary rope in lifting are slightly different fromthose in lowering However the total lateral vibra-tion displacements of the vertical rope in loweringare larger than those in lifting In addition the total
0400800
12001600
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
LiftingLowering
(a)
LiftingLowering
ndash16ndash8
08
16
Velo
city
(ms
)
20 40 60 80 100 1200Time (s)
(b)
LiftingLowering
ndash1ndash05
005
1
Acce
lera
tion
(ms
2 )
20 40 60 80 100 1200Time (s)
(c)
Figure 2 Motion curves of the winding hoist
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
ndash004ndash002
0002004
(c)
Figure 3 Lateral vibration displacements at lc2 of the catenary rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
6 Shock and Vibration
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Conclusions
In this paper the nonlinear vibration behavior of thehoisting rope under the axial wobbles of the head sheave inthe coal mine winding hoist is studied e mathematicalmodel of the hoisting system is established by the Hamiltonprinciple and it can be solved by MATLAB simulation econclusions can be obtained as follows
(1) e lateral vibration displacements of the catenaryrope during lifting are substantially the same as thoseduring lowering e larger the order of the headsheave axial wobble the closer the large amplitudes
of the lateral vibration of the catenary rope to bothends However the lateral vibration displacements ofthe vertical rope during lifting are different fromthose during lowering e larger the order of thehead sheave axial wobble the closer the large am-plitude of the lateral vibration of the vertical rope tothe upper end of the well
(2) e total lateral vibration displacements of thecatenary rope in lifting are slightly different fromthose in lowering However the total lateral vibra-tion displacements of the vertical rope in loweringare larger than those in lifting In addition the total
0400800
12001600
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
LiftingLowering
(a)
LiftingLowering
ndash16ndash8
08
16
Velo
city
(ms
)
20 40 60 80 100 1200Time (s)
(b)
LiftingLowering
ndash1ndash05
005
1
Acce
lera
tion
(ms
2 )
20 40 60 80 100 1200Time (s)
(c)
Figure 2 Motion curves of the winding hoist
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
ndash004ndash002
0002004
(c)
Figure 3 Lateral vibration displacements at lc2 of the catenary rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
6 Shock and Vibration
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 5 Lateral vibration displacements at lv(t)2 of the vertical rope in lifting (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash008ndash004
0004008
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash008ndash004
0004008
0 20 40 60 80 100 120Time (s)
(c)
Figure 6 Lateral vibration displacements at lv(t)2 of the vertical rope in lowering (a) e first-order excitation of head sheave axialwobbles (b) e second-order excitation of head sheave axial wobbles (c) e third-order excitation of head sheave axial wobbles
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(a)
ndash004ndash002
0002004
Late
ral
disp
lace
men
t (m
)
0 20 40 60 80 100 120Time (s)
(b)
Late
ral
disp
lace
men
t (m
)
ndash004ndash002
0002004
0 20 40 60 80 100 120Time (s)
(c)
Figure 4 Lateral vibration displacements at lc2 of the catenary rope in lowering (a) e first-order excitation (b) the second-orderexcitation and (c) the third-order excitation of head sheave axial wobbles
Shock and Vibration 7
lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

lateral vibration displacements under head sheaveaxial wobbles of the vertical rope are larger thanthose of the catenary rope
(3) e axial wobble amplitude of the head sheave ispositively correlated with the total lateral vibrationdisplacement of the hoisting rope As the same typeand similar size of the double-rope coal mine
ndash008
ndash004
0
004
008D
ispla
cem
ent (
m)
00404
0 20 40 60 80 100 120Time (s)
Figure 7 Total lateral vibration displacements at lc2 of the cat-enary rope in lifting
ndash008
ndash004
0
004
008
Disp
lace
men
t (m
)
00564
0 20 40 60 80 100 120Time (s)
Figure 8 Total lateral vibration displacements at lc2 of the cat-enary rope in lowering
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash00667
0 20 40 60 80 100 120Time (s)
Figure 9 Total lateral vibration displacements at lv(t)2 of thevertical rope in lifting
ndash012
ndash008
ndash004
0
004
008
012
Disp
lace
men
t (m
)
ndash011480 20 40 60 80 100 120
Time (s)
Figure 10 Total lateral vibration displacements at lv(t)2 of thevertical rope in lowering
0003m0004m
0006m0007m
0
005
01
015
02
Disp
lace
men
t (m
)
20 40 60 80 100 1200Time (s)
(a)
0003m0004m
0006m0007m
0
2
4
6
Dist
ance
pro
port
ion
()
20 40 60 80 100 1200Time (s)
(b)
Figure 11 Lateral vibration of the catenary rope under dierentaxial wobble amplitudes of the head sheave (a) Total lateral vi-bration displacements (b) Distance proportions
8 Shock and Vibration
winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

winding hoist are used when the axial wobbleamplitude of the head sheave is less than 0003m itmeets the design requirement of the coal mineenterprise
Appendix
ematrices of mass damping stiness coupled term of thegeneralized coordinate and generalized force are as follows
Mucij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Mwcij ρδij +JslcR
2s
ϕci(1)ϕcj(1)
Muvij ρδij +mp
lvϕvi(1)ϕvj(1)
Mwvij ρδij +mp
lvφvi(1)φvj(1)
Cucij 2ρclcint1
0ϕcψiϕcjdψc minus
cslcϕci(1)ϕcj(1)
Cwcij 2ρclcint1
0φcψiφcjdψc
Cuvij 2ρclvint1
01minusψv( )ϕvψiϕvjdψv
Cwvij 2ρclvint1
01minusψv( )φvψiφvjdψv +
c
lvφvi(1)φvj(1)
Kucij ρalcint1
0ϕcψiϕcjdψc +
ρc2 minusEAl2c
int1
0ϕcψψiϕcjdψc
Kwcij ρaminus ρg sin(θ)
lcint1
0φcψiφcjdψc +
ρg sin(θ)lc
int1
0ψcφcψψiφcjdψc
+ρc2 minus mp + ρlv( )g
l2c int
1
0φcψψiφcjdψc minus
3e2mEA2l4c
int1
0φcψψiφcjdψc
0003m0004m
0006m0007m
0
01
02
03
04D
ispla
cem
ent (
m)
40 806020 100 1200Time (s)
(a)
0003m0004m
0006m0007m
20 40 60 80 100 1200Time (s)
0
5
10
15
Dist
ance
pro
port
ion
()
(b)
Figure 12 Lateral vibration of the vertical rope under dierent axial wobble amplitudes of the head sheave (a) Total lateral vibrationdisplacements (b) Distance proportions
Shock and Vibration 9
Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Kuvij ρa
lv11139461
01minusψv( 1113857ϕvψiϕvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2ϕvψψiϕvjdψv minusEA
l2v11139461
0ϕvψψiϕvjdψv +
EA
l2v1minus e
csls1113872 1113873ϕcψi(1)ϕcj(1)
Kwvij ρa
lv11139461
01minusψv( 1113857φvψiφvjdψv +
ρc2
l2v11139461
01minusψv( 1113857
2φvψψiφvjdψv minusρg
lv11139461
01minusψv( 1113857φvψψiφvjdψv
minusmpg
l2v+3e2mEA
2l4v1113888 1113889 1113946
1
0φvψψiφvjdψv +
k
lvφvi(1)φvj(1)
Pucij emEA
l3c11139461
01113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠ϕcjdψc minusEA
2l3c11139461
01113944
4
i1qwciφcψi
⎛⎝ ⎞⎠ 1113944
4
i1qwciφcψψi
⎛⎝ ⎞⎠⎛⎝ ⎞⎠ϕcjdψc
Pwcij minusEA
l3c11139461
01113944
4
i1ϕuψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc +emEA
l3c11139461
01113944
4
i1ϕcψψiquci
⎛⎝ ⎞⎠φcjdψc
+3emEA
l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠ 1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc minusEA
l3c11139461
01113944
4
i1ϕuψψiquci
⎛⎝ ⎞⎠ 1113944
4
i1φcψiqwci
⎛⎝ ⎞⎠φcjdψc
minus3EA
2l4c11139461
01113944
4
i1φcψiqwci
⎛⎝ ⎞⎠
2
1113944
4
i1φcψψiqwci
⎛⎝ ⎞⎠φcjdψc
Puvij emEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ϕvjdψv minusEA
2l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠
2
ϕvjdψv +1
ecsls1113944
4
i0qci(t)ϕcψψi(1)ϕcj(1)
Pwvij minusEA
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv minusEA
l3v11139461
01113944
4
i1ϕvψψiquvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
minus3EA
2l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠
2
1113944
4
i1φvψψiqwvi
⎛⎝ ⎞⎠φvjdψv +EAem
l3v11139461
01113944
4
i1ϕvψiquvi
⎛⎝ ⎞⎠φvjdψv
+3EAem
l4v11139461
01113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠ 1113944
4
i1φvψiqwvi
⎛⎝ ⎞⎠φvjdψv
Fucij ρ(aminusg(1 + sin(θ))) 11139461
0ϕcjdψc +
Jsa
R2s lc
ϕcj(1)
Fwcij ρemtt +(ρg sin(θ)minus ρa)em minus 2ρcemt
lc1113888 1113889 1113946
1
0φcjdψc minus ρemtt 1113946
1
0ψcφcjdψc
Fuvij ρa 11139461
0ϕvjdψv +
mpa
2lv+
EAe2m
2l3v1113888 1113889ϕvj(1)
Fwvij ρemtt minus2ρcemt + ρaem
lv+2ρc2em
l2v1113888 1113889 1113946
1
01minusψv( 1113857φvjdψv +
ρgem
lv11139461
01minusψv( 1113857φvψψjdψv
+mpgem
l2v+
EAe3m
2l4v1113888 1113889 1113946
1
0φvψψjdψv (A1)
10 Shock and Vibration
where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

where δij is the Kronecker delta and is defined asδij 1 i j
δij 0 ine ji 1 2 middot middot middot 4 j 1 2 middot middot middot 4
⎧⎨
⎩ (A2)
Data Availability
e data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
e authors declare that there are no conflicts of interestregarding the publication of this paper
Acknowledgments
is work was partially supported by the National NaturalScience Foundation of China (51675520) and the projectfunded by the Priority Academic Program Development ofJiangsu Higher Education Institutions (PAPD)
References
[1] A Carbogno ldquoMine hoisting in deep shafts in the 1st half of21st Centuryrdquo Acta Montanistica Slovaca vol 7 no 3pp 188ndash192 2002
[2] M Ferretti G Piccardo and A Luongo ldquoWeakly nonlineardynamics of taut strings traveled by a single moving forcerdquoMeccanica vol 52 no 13 pp 3087ndash3099 2017
[3] L Kevac M Filipovic and A Rakic ldquoDynamics of the processof the rope winding (unwinding) on the winchrdquo AppliedMathematical Modelling vol 48 pp 821ndash843 2017
[4] N-H Zhang and L-Q Chen ldquoNonlinear dynamical analysisof axially moving viscoelastic stringsrdquo Chaos Solitons ampFractals vol 24 no 4 pp 1065ndash1074 2005
[5] L-Q Chen Y-Q Tang and J W Zu ldquoNonlinear transversevibration of axially accelerating strings with exact internalresonances and longitudinally varying tensionsrdquo NonlinearDynamics vol 76 no 2 pp 1443ndash1468 2014
[6] Y Terumichi M Ohtsuka M Yoshizawa Y Fukawa andY Tsujioka ldquoNonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lowerendrdquo Nonlinear Dynamics vol 12 no 1 pp 39ndash55 1997
[7] W D Zhu and H Ren ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart I Methodologyrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051036 2013
[8] H Ren andW D Zhu ldquoAn accurate spatial discretization andsubstructure method with application to moving elevatorcable-car systemsndashPart II Applicationrdquo Journal of Vibrationand Acoustics vol 135 no 5 article 051037 2013
[9] R S Crespo S Kaczmarczyk P Picton and H Su ldquoMod-elling and simulation of a stationary high-rise elevator systemto predict the dynamic interactions between its componentsrdquoInternational Journal of Mechanical Sciences vol 137pp 24ndash45 2018
[10] J-h Bao P Zhang C-M Zhu and W Sun ldquoTransversevibration of flexible hoisting rope with time-varying lengthrdquoJournal of Mechanical Science and Technology vol 28 no 2pp 457ndash466 2014
[11] S H Sandilo and W T van Horssen ldquoOn a cascade ofautoresonances in an elevator cable systemrdquo Nonlinear Dy-namics vol 80 no 3 pp 1613ndash1630 2015
[12] N V Gaiko and W T van Horssen ldquoResonances and vi-brations in an elevator cable system due to boundary swayrdquoJournal of Sound and Vibration vol 424 pp 272ndash292 2018
[13] L-Q Chen ldquoAnalysis and control of transverse vibrations ofaxially moving stringsrdquo Applied Mechanics Reviews vol 58no 2 pp 91ndash116 2005
[14] Y H Hsu and C P Pan ldquoe staticWKB solution to catenaryproblems with large sag and bending stiffnessrdquoMathematicalProblems in Engineering vol 2014 Article ID 23172611 pages 2016
[15] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 1 mathe-matical modelrdquo Journal of Sound and Vibration vol 262no 2 pp 219ndash244 2003
[16] S Kaczmarczyk and W Ostachowicz ldquoTransient vibrationphenomena in deep mine hoisting cables Part 2 numericalsimulation of the dynamic responserdquo Journal of Sound andVibration vol 262 no 2 pp 245ndash289 2003
[17] J Wang Y Pi Y Hu and X Gong ldquoModeling and dynamicbehavior analysis of a coupled multi-cable double drumwinding hoister with flexible guidesrdquo Mechanism and Ma-chine eory vol 108 pp 191ndash208 2017
[18] X Peng X S Gong and J J Liu ldquoVibration control onmultilayer cable moving through the crossover zones on minehoistrdquo Shock and Vibration vol 2016 Article ID 68780217 pages 2016
[19] J Yao X Xiao A Peng Y Jiang and C Ma ldquoAssessment ofsafety for axial fluctuations of head sheaves in mine hoistbased on coupled dynamic modelrdquo Engineering FailureAnalysis vol 51 pp 98ndash107 2015
[20] G H Cao X Cai N G Wang W H Peng and J S LildquoDynamic response of parallel hoisting system under drivedeviation between ropes with time-varying lengthrdquo Shock andVibration vol 2017 Article ID 6837697 10 pages 2017
[21] Y Wang G Cao and W T van Horssen ldquoDynamic simu-lation of a multi-cable driven parallel suspension platformwith slack cablesrdquo Mechanism and Machine eory vol 126pp 329ndash343 2018
[22] L-Q Chen N-H Zhang and J W Zu ldquoe regular andchaotic vibrations of an axially moving viscoelastic stringbased on fourth order Galerkin truncatonrdquo Journal of Soundand Vibration vol 261 no 4 pp 764ndash773 2003
Shock and Vibration 11
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom