Embed Size (px)
Citation preview

JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010 305
Nonlinear Behavior of an Electrostatic EnergyHarvester Under Wide- and Narrowband Excitation
Lars Geir Whist Tvedt, Duy Son Nguyen, and Einar Halvorsen, Member, IEEE
Abstract—This paper investigates an electrostatic vibrationenergy harvester that displays rich nonlinear behavior includingjumps during frequency sweeps and broadening of the spectrumwith increasing levels of broadband vibration. We demonstratethat the measured nonlinear phenomena can be adequately de-scribed by a lumped model with a nonlinear beam displaying bothspring softening and hardening. Our results show that consider-able bandwidth enhancements can be achieved by use of nonlinearsprings without relying on mechanical stopper impacts, resonancetuning, or large electromechanical coupling. [2009-0138]
Index Terms—Electrostatic devices, energy harvester, nonlinearsystems, vibrations.
I. INTRODUCTION
M ICROSCALE energy harvesting from motion presentlyreceives great worldwide attention as a candidate to
power autonomous sensors both in machinery and on the humanbody [1], [2]. From the early start [3], [4], the focus hasbeen mainly on resonant devices that are subject to harmonicvibration at their resonance frequency. A resonant device isessentially a spring-mass system with a transducer that isdriven by the relative motion between the proof mass and thepackage. The transducer is usually based on a piezoelectric,electromagnetic, or electrostatic conversion principle.
Driving the system at a sharp resonance is beneficial froma performance point of view, but may be difficult in practicebecause it requires the environmental frequency to be known atthe time of design and/or fabrication. As the vibration spectramay have a very rich frequency content, some not narrow-banded at all [5]–[7], there is considerable interest in extendingthe bandwidth that the devices can harvest from.
For low-frequency vibrations, the use of loose or extremelyweakly suspended proof masses has been demonstrated as a
Manuscript received May 23, 2009; revised November 12, 2009. Firstpublished February 2, 2010; current version published April 2, 2010. This workwas supported in part by Regional Government funds through Project BTV-Teknologi and in part by the Research Council of Norway under Grants 176485and 191282. Subject Editor H. Seidel.
L. G. W. Tvedt was with the Institute for Microsystem Technology,Faculty of Science and Engineering, Vestfold University College, 3103 Horten,Norway. He is now with the Department of Microsystems and Nano-technology, The Foundation for Scientific and Industrial Research at theNorwegian Institute of Technology, Information and Communication Technol-ogy, 0314 Oslo, Norway (e-mail: [email protected]).
D. S. Nguyen and E. Halvorsen are with the Institute for MicrosystemTechnology, Faculty of Science and Engineering, Vestfold University College,Horten, Norway (e-mail: [email protected]; [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JMEMS.2009.2039017
means to make genuinely nonresonant devices [8], [9]. Forresonant devices, various means to extend harvester bandwidthor input frequency tolerance have been proposed. Some in-clude the use of independent harvester arrays, which tradesoutput power versus bandwidth by having a number of smallergenerators with different frequencies within the same device[10], [11]. Others exploit mechanical nonlinearities. These mayutilize beam prestress [12], [13], stopper impacts [14], or acombination of beam tension and stopper impacts [15].
The experimental characterization of these devices is mainlyperformed by sweeping or stepping frequency. True broadbandexcitations have been used to characterize mechanically lineardevices with nonlinear electrical loads [16], [17], but seems tobe unexplored for resonant devices with mechanical nonlinear-ities. Since nonlinearities mix different frequency components,the spectral content in both harvested and delivered powermight be very different for wideband vibrations than whatmight be inferred from frequency sweeps.
To our knowledge, all the resonant devices with nonlinearbandwidth enhancement reported in the literature so far, havebeen piezoelectric or electromagnetic devices. Even thoughnonlinear responses are evidently present in some reportedelectrostatic devices [18], [19], there seems to be no studiesof the relationship between nonlinear behavior and harvesterbandwidth for this type of devices.
Here, we present characterization, modeling, and analysisof an electrostatic energy harvester with nonlinear behavior.We use frequency sweeps, amplitude sweeps, and widebandnoise in the characterization. The device is of the in-planegap overlap type [20] also made by several other groups [19],[21], [22]. See also [23] and [24] for detail modeling includingelectromechanical coupling-induced nonlinearities and our ownprevious work modeling the effect of mechanical stoppers inthis type of device [25].
This paper builds on the master thesis of the first author [26].The device studied here differs from previous electrostatic de-vices in having strong mechanical nonlinearities. Our previousmodels [25], [26] have been used as a basis for the new modelspresented here, which include the nonlinearities of the springssuspending the proof mass.
The outline of this paper is as follows. In Section II, wepresent our device and the experimental setup used to charac-terize it. Measurements of the device behavior under a widerange of operating conditions are reported in Section III. InSection IV, we analyze the linear and nonlinear behavior of thedevice in detail by comparing lumped model simulations to themeasurements. The implications of our findings are discussedin Section V. Section VI concludes this paper.
1057-7157/$26.00 © 2010 IEEE

306 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010
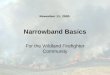
Fig. 1. Schematic drawing of the energy harvester design. Black squares areelectrical contact pads. Dark gray rectangles are mass–spring anchorages.
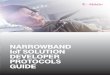
Fig. 2. Details of the energy harvester showing a corner of the proof masswith its electrode fingers and a part of the fixed electrode fingers including oneof the electrode anchors. (Photograph: Tronics Microsystems S.A.).
II. DEVICE DESCRIPTION AND EXPERIMENTAL SETUP
Fig. 1 shows a schematic drawing of the electrostatic energyharvester analyzed in this paper. The inertial mass is suspendedin four beams, of which two has anchors also serving aselectrical contact pads. The beams have clamped support at theanchors, i.e., no stress relief, so that they behave as hardeningsprings at sufficiently large displacement amplitudes. The an-chors also function as mechanical stoppers at very large ampli-tude vibrations to avoid the capacitor fingers of the electrodesto collapse into each other. There are two fixed electrodes eachwith one electrical contact pad. When excited, the proof masswith its electrodes moves between the two fixed electrodes,modulating the capacitances between each fixed electrode andthe proof mass electrodes.
The device was fabricated in the Tronics multiproject waferfoundry which is based on deep reactive ion etch of a siliconon insulator wafer with a 60-μm-thick device layer [27]. Fig. 2shows a part of the fixed electrode fingers and the counterelectrode fingers on the proof mass (bottom right part withetch holes). The energy harvester dimensions are given inTable I. Spring and capacitor finger widths are very criticalfor performance, but may differ considerably from the layoutvalue in the fabricated device because we designed these at
TABLE IDIMENSIONS OF THE ENERGY HARVESTER
Fig. 3. SEM picture of an energy harvester prototype sample showing mea-surements of the capacitor finger dimensions.
the minimum tolerances of the process. We therefore measuredthese on a broken sample using a scanning electron microscope(SEM) (see Fig. 3). The measured values are also given in thetable.
Electrostatic energy harvesters need a bias to operate. Thiscan be provided by an electret embedded in the device [22], byappropriate design of the power management circuitry [21], byexploiting the work function difference between two differentmetals [28], or by using precharged floating electrodes [29]. Weconsider this outside the scope of this paper, and have chosen tobias by an external voltage source connected to the proof massthrough the electrical contact pads on the two spring anchors.An alternative would have been to use a charging capacitor [19].The present approach is equivalent to a very large chargingcapacitor.
Fig. 4 shows a schematic representation of the energy har-vester. The mechanical part consists of the inertial mass m,mechanical damping b represented by a dashpot, and the springsuspension with linear stiffness k. The spring may behavenonlinearly as previously mentioned and discussed in detailin Section IV-B below. The electrical part consists of the two

TVEDT et al.: NONLINEAR BEHAVIOR OF AN ELECTROSTATIC ENERGY HARVESTER UNDER WIDE- AND NARROWBAND EXCITATION 307
Fig. 4. Model of the energy harvester including both the mechanical andelectrical subsystems.
Fig. 5. (Top right corner) Electrostatic energy harvester mounted on a PCBtest board.
out-of-phase variable capacitors C1 and C2, load resistors RL1
and RL2, parasitic capacitances Cp and CpL, and an externalbias Ve.
The energy harvester is mounted on a printed circuit board(PCB) test board together with two buffer amplifiers and twoload resistors, as shown in Fig. 5. The two load resistors RL1
and RL2 have the same resistance value of 30 MΩ. The energyharvester is seen on the top right-hand side of the PCB testboard. The PCB test board is mounted on a Bruel & KjærType 4809 shaker together with a Silicon Designs 1210J-25accelerometer. The shaker is driven by an amplifier fed by eithera chirp or a random noise signal. The setup is controlled by a PCusing LabView v8.5.1 and an NI-USB-6211 DAQ which allowsfull control of the excitation signal and simultaneous logging ofboth voltage outputs and acceleration.
III. MEASUREMENTS
In the following, we present measurements on the deviceunder a variety of vibration signals: frequency sweeps at fixedamplitude (chirps), broadband random noise with approxi-mately flat power spectral density (PSD), and fixed frequencyamplitude sweeps. The measurements were made with differentchoices for, respectively, the fixed amplitude, PSD, and vibra-tion frequency. We also varied the bias voltage. All the resultsare given for one electrical port, also for the PSD of poweroutput.
Fig. 6. Measurement of up and down frequency sweeps with excitationamplitude of 0.01 g rms for bias voltages of 5, 10, and 15 V.
Fig. 7. Measurement of up and down frequency sweeps at 10-V bias with0.01, 0.025, 0.055, 0.1, and 0.16 g rms excitation (from lower to upper cuve).The solid curves are the up sweeps while the dashed curves are the downsweeps. Characteristic regions i)–v) for the 0.16 g data are marked.
In the frequency sweeps, we have calculated the rms valueacross 1152 sample points which correspond to a frequencyinterval of 0.87 Hz. In the amplitude sweeps, we have 1536sample points which correspond to about 0.23 × 10−3 g rms.
Fig. 6 shows the rms voltage across one of the two loadresistors as a function of frequency. The frequency sweep wasdone at a low and constant amplitude (0.01 g rms), while thefrequency was swept both from 0 to 1000 Hz and from 1000to 0 Hz. The resonance frequency is about 550 Hz with abandwidth of about 21 Hz for the biases of 5, 10, and 15 V.Since the bandwidth is quite insensitive to the bias voltage, wecan infer that the mechanical damping dominates the electricaldamping. At this low vibration level, the device is linear toa good approximation. We verified this by checking that theresponse function is independent of amplitude in this regime.Moreover, the up and down frequency sweeps are identical.
As the excitation level increases, the peak frequency driftsdownwards and develops a hysteresis between the up anddown sweeps, as shown in Fig. 7, indicating a softening springeffect. For further increase in amplitude, the peak frequencydrifts to the right and develops yet another region of hysteresisor multivaluedness in the upper frequency range. Hence, the

308 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010
Fig. 8. Measurement of up and down frequency sweeps at 0.16 g rmsexcitation with several bias voltages. The solid curves are the up sweeps whilethe dashed curves are the down sweeps.
device displays typical properties of both softening and stiffen-ing springs. In the following, we will refer to the regions of theresponse that have different values of amplitude on up and downsweep as two-valued responses. For a vibration of 0.16 g rms,we can identify five characteristic regions of the response: i) aunique low-amplitude response at low frequencies; ii) a uniquelow-amplitude response at high frequencies; iii) a unique high-amplitude response at intermediate frequencies around 500 Hzand two-valued responses iv) and v) just below and abovethe intermediate high-amplitude region. Region iii) shrinks tozero at lower amplitudes as shown for the trace for 0.1 g rmsacceleration. Just below 0.1 g rms acceleration, there is onlyone region of two-valued response. This region shrinks to zeroto yield a single trace as the acceleration is further reduced.
In Fig. 8, frequency sweeps of the rms output voltageare shown for different bias voltages at an acceleration of0.16 g rms. The output voltage is roughly proportional tothe bias voltage away from the jumps. The frequency of thedown-jump on the upper side of the response is much moresensitive to the bias voltage than the other jumps. In particular,the extension of the region of unique high-amplitude output,is largely unaffected by the bias voltage. When lowering theacceleration down to 0.1 g rms, this region shrinks, but itsextension is still not sensitive to the bias voltage while the upperdown-jump is (see Fig. 9).
Next, we consider output voltage dependence on vibrationamplitude. In Fig. 10, we see the results of sweeping theamplitude either from a low-to-high value (up sweep) or froma high-to-low value (down sweep). The fixed frequency (of498 Hz) is chosen in the region iii) with single-valued highamplitude for the 0.16 g trace in Fig. 7. On up sweep, weobserve a single jump to a high-amplitude value when reaching0.1 g, and high-amplitude motion becomes possible (see Fig. 7).
On down sweep, the system typically starts on the part ofthe curve with high-amplitude motion after the initial transient.When sweeping down, the amplitude stays high beyond 0.1 gwhere there is also the possibility of low-amplitude motion. It
Fig. 9. Measurement of up and down frequency sweeps at 0.1 g rms excitationwith several bias voltages. The solid curves are the up sweeps while the dashedcurves are the down sweeps.
Fig. 10. Measurement of up and down amplitude sweeps at 498 Hz withvarious bias voltages.
stays on the high-amplitude branch (see the 0.1 g and 0.16 gtraces in Fig. 7), until a further jump down to the low-amplitudebranch takes place. Comparing to Fig. 7, we see that when theacceleration amplitude is reduced from 0.1 g to 0.055 g, thetwo-valued region on the upper side of the response changesinto a single-valued one, while the two-valued region on thelower side of the response move upwards in frequency to coverthe frequency (498 Hz) of the amplitude sweep. The plateauin Fig. 10 corresponds to the high-amplitude branch of thelatter two-valued region. Upon further reduction in vibrationamplitude, a second jump to the now lowest branch takes place.Eventually, the low-amplitude branch becomes unique, and theoutput goes continuously to zero. This complicated behavioris made possible by the drastic changes in the shape of theresponse with the amplitude of the excitation shown in Fig. 7.
For other choices of excitation frequencies, the behavior maybe simpler. As an example, results from an amplitude sweepat a frequency of 480 Hz for 5, 10, and 15 V is shown inFig. 11. This frequency is inside the bandwidth of unique high-amplitude motion at the higher excitation amplitudes in Fig. 8,but below the frequency used in Fig. 10. Here, we see only onejump on each trace.

TVEDT et al.: NONLINEAR BEHAVIOR OF AN ELECTROSTATIC ENERGY HARVESTER UNDER WIDE- AND NARROWBAND EXCITATION 309
Fig. 11. Measurement of up and down amplitude sweeps at 480 Hz withvarious bias voltages.
Fig. 12. Acceleration PSD for several excitation levels (1.6 × 10−6, 5.68 ×10−6, 19 × 10−6, 77.6 × 10−6, and 128 × 10−6 g2/Hz). The average PSDlevels were estimated at 48-kHz sample rate in 40 s, 32 768 points fast Fouriertransform and within 200–1600 Hz.
Fig. 13. PSD of power output with several excitation levels (1.6 ×10−6, 5.68 × 10−6, 19 × 10−6, 77.6 × 10−6, and 128 × 10−6 g2/Hz) at10-V bias.
We also characterized the device under broadband excita-tions. We used excitation signals with a relatively flat PSDfrom 200 to 1600 Hz. Fig. 12 shows the one-sided PSD versus
Fig. 14. PSD of power output at 5.68 × 10−6 g2/Hz average accelerationPSD at different bias voltages.
Fig. 15. (Circles) Measured output power compared to (solid line) lineartheory for maximum possible power and (dashed line) expected output powerwith loss accounted for. Thin horizontal lines mark uncertainty in accelera-tion PSD.
frequency for several excitation levels. The resulting outputPSD is shown in Fig. 13 for these excitation signals. A shiftof the resonance frequency of the harvester toward the lowerfrequencies as the excitation level increases is observed. Inaddition, we notice a widening of the output bandwidth as theexcitation increases.
At a low excitation level, the shape of the spectrum shown inFig. 14 is similar to the response obtained for frequency sweepsin Fig. 6 above. The resonance frequency is stable while theoutput PSD increases with the bias voltage. The peak atthe lower end of the range is the 50 Hz mains interference.The bumps around 1100 Hz are second harmonics. The shape ispreserved when the bias voltage is increased, indicating also inthis case that the mechanical damping dominates the electricaldamping.
The measured output power as a function of the accelerationPSD is shown in Fig. 15 (circles). It shows roughly a linearbehavior over the entire range. The deviations from linearbehavior at low levels are due to noise (∼ 8 × 10−8 g2/Hz)

310 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010
in the acceleration measurements, as shown in the figure. Themeasurement is compared to linear theory [30]. The solid lineshows the maximum output power for a mass of the presentsize. The dashed line shows the theoretical output power whenlosses are accounted for using parameters from the next section.The deviations from linear behavior at acceleration levels farabove the measurement noise level must be due to the nonlin-earities of the device already evident from the output spectra inFig. 13 above.
IV. MODELING AND ANALYSIS
To analyze the energy harvester behavior, we have madeequivalent circuit lumped models: one linear and one nonlinear.Both are based on a single mechanical degree of freedom, thedisplacement x of the proof mass, and two electrical degreesof freedom, the charges on the variable capacitor electrodes.In the present section, we discuss these models and comparesimulation results to experimental results.
In modeling the variable capacitances (see Fig. 4), we usethe parallel plate capacitor formula for the interelectrode ca-pacitances C1 and C2
C1/2(x) =C0
(1 ∓ x
x0
)(1)
C0 =2Ngε0tfx0
g0(2)
where Ng is the number of fingers of the comb structure, ε0 isthe permittivity of vacuum, tf is the thickness the fingers (equalto the device layer of the SOI wafer), x0 and g0 are the nominaloverlap of and gap between the finger structures of the capacitorelectrodes, respectively.
To take into account stray capacitances from electrodes topackage and to some extent also the fringing capacitances ne-glected in (1), we have added a parasitic capacitance Cp parallelto the variable capacitance. The total internal capacitances CT
1
and CT2 are then
CT1/2(x) = Cp + C1/2(x) (3)
and the voltages VL1 and VL2 at the ports are given by
VL1/L2 =q1/2
CT1/2(x)
+ Ve (4)
where q1 or q2 are the charges on port 1 or 2, respectively.Newton’s second law for the proof mass motion reads
mx + bx + Fr + Fe = ma (5)
where m is the mass, ma is the fictitious force experienceddue to the acceleration of the device, and Fe and Fr are theelectrostatic force and the force on the spring, respectively. Thespring force will be discussed in detail for the nonlinear model.The electrostatic force is given by
Fe =q21
2d
dx
(1
CT1 (x)
)+
q22
2d
dx
(1
CT2 (x)
). (6)
A. Linear Regime
When the device works in the small signal regime, i.e., atsmall oscillations and small charge variations, we can linearizearound the equilibrium state. At the equilibrium, x = 0 and
q1 = q2 = q0 ≡ −VeCT0 (7)
CT1 =CT
2 = CT0 ≡ Cp + C0. (8)
We then introduce the small charge variations δq1 and δq2
defined by
δq1/2 = q1/2 − q0. (9)
Linearization of (4) and (6) yields
VL1/L2 ≈δq1/2
CT0
∓ α · x (10)
Fe ≈ − α(δq1 − δq2) + 2CT0 α2x (11)
where
α =1x0
C0
CT0
Ve. (12)
In the linear regime, the spring force is simply given byHooke’s law
Fr = kx. (13)
In the linear regime and equally loaded ports, the chargedifference q1 − q2 and total charge q1 + q2, as well as thevoltage difference and average voltage, become decoupled andthe total charge become independent of the proof mass motion[23]. It is therefore convenient to introduce the quantities
q =δq1 − δq2
2(14)
VL =VL1 − VL2
2. (15)
The limiting charge and voltage will then be q and VL on port1 and −q and −VL on port 2. Equation (10) gives
VL =q
CT0
− αx. (16)
Substituting (11) and (13) into (5), we obtain
mx + bx + kocx − 2αq = ma (17)
where
koc = k + 2CT0 α2. (18)
Each port is connected to the load resistor RL in parallel withthe parasitic (capacitor) CL giving the final equation
−q =VL
RL+ CL
dVL
dt. (19)
Based on (17) and (19), the equivalent circuit for the linearregime is, as shown in Fig. 16. Behavioral voltage sourcesare used to represent the coupling between the mechanical

TVEDT et al.: NONLINEAR BEHAVIOR OF AN ELECTROSTATIC ENERGY HARVESTER UNDER WIDE- AND NARROWBAND EXCITATION 311
Fig. 16. Equivalent circuit used for simulations in the linear regime. The topmost circuit represents the mechanical part while the bottom circuit representsthe electrical part. The coupling between the two is contained in the controlledvoltage sources.
TABLE IIMODEL PARAMETERS OF THE ENERGY HARVESTER
IN THE SMALL-SIGNAL REGIME
and electrical part. Note that the electrical part corresponds toone port. This is accounted for in the mechanical part by thefactor two in the source representing the electrostatic force.The parameters used in the linear model are given in Table II.All parameters were obtained by fitting simulated response tothe measured frequency response, except for the mass whichwas calculated and the initial finger overlap which is takenfrom the design. The fitted load resistance of 28 MΩ turnedout slightly lower than the component value which is 30 MΩas mentioned in Section II. The fitted capacitance C0 is 10%less than the values dictated by (2) and the values from Table I,i.e., 1.96–2.06 pF, when we use the measured finger widthsto calculate the gap. The linear stiffness is in the lower endof the range 67.9–78.7 N/m calculated from Table I using themeasured beam widths.
In Fig. 17, we show a comparison between the simulatedresponse and the measured response from frequency sweeps atlow acceleration. The only difference between the simulationsis the bias voltages. All other parameters are held fixed. Theclose agreement between the simulated and measured result in-dicates that the simple capacitance model with fringing effectsrepresented by a phenomenological parallel capacitance quiteclosely reproduces the electromechanical transduction of thedevice.
The output PSD when driven by a broadband vibration signalis shown in Fig. 18. The measured acceleration is used as inputfor the simulations. In addition, in this case, we find closeagreement between the simulated and measured results as we
Fig. 17. Up frequency sweep at 0.01 g rms acceleration with several biasvoltages. Diamonds: experimental data. Solid lines: SPICE simulations.
Fig. 18. PSD of power output at the 0.41 × 10−6 g2/Hz average accelerationPSD for several bias voltages. Diamonds: experimental data. Solid lines: SPICEsimulations.
would expect in the linear regime. The results are quite noisydue to the finite duration of the random input signal.
In the linear regime, we can calculate a transfer function asthe output PSD divided by the spectral density of the inputacceleration. This is proportional to the magnitude square ofthe voltage to acceleration transfer function. The comparisonbetween simulation and experiment is shown in Fig. 19. Theoverall shape is the same as that in Fig. 18, but the resultis considerably less noisy because the variations in spectralcontent in driving signal and output are equal and thereforecancel each other.
B. Nonlinear Regime
Having established a linear model that reproduces the smallsignal behavior and gives confidence in the electrostatic trans-ducer model, we now consider the nonlinear effects observedfor stronger vibrations. We keep the variable capacitor modelas defined by (1)–(3) without linearization. By itself, this givesnonlinearities in the electromechanical coupling that could beimportant [23], [24]. From the frequency sweeps in Section III,

312 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010
Fig. 19. Transfer function of energy harvester system at 0.41 × 10−6 g2/Hzaverage acceleration PSD for several bias voltages. Diamonds: experimentaldata. Solid lines: SPICE simulations.
Fig. 20. Variable capacitor model. (Left side) The equivalent variable capaci-tor. (Right side) The lumped element model of the equivalent variable capacitor.
we observed that the characteristic frequencies of some of thejumps between different stable orbits are bias-voltage indepen-dent. The observation suggests that these nonlinear phenomenado not originate from the electromechanical coupling. There-fore, we should also consider mechanical nonlinearities.
For simulation, we need to implement the variable capacitorsCT
i (x) (where i = 1, 2). Each can be described by an arbitraryfixed capacitor Cfi connected in series with a behavioral volt-age source VSi. Fig. 20 shows the equivalent variable capacitorand the lumped element model representing it. The behavioralvoltage source is given by
VSi = Vi
(Cfi
CTi (x)
− 1)
i = 1, 2. (20)
The electrostatic force Fe is found by carrying out thedifferentiation in (6) with the capacitance given by (1)–(3). Itis implemented in the equivalent model as a behavioral voltagesource.
We model the spring force Fr as a polynomial in the dis-placement x. Due to the symmetry of the suspension, the elasticenergy is an even function of x and results in a spring forcethat is an odd function. We therefore include only odd termsin the polynomial. To capture the effect of both hardeningand softening of the spring, we need at least a fifth-orderpolynomial. For accuracy, we include an extra term
Fr = k1x + k3x3 + k5x
5 + k7x7. (21)
The nonlinear lumped-element model is based directly on(4) and (5). The aforementioned details are all implemented in
Fig. 21. Equivalent circuit used for simulations in the nonlinear regime.
TABLE IIISTIFFNESS PARAMETERS FOR THE NONLINEAR MODEL
the complete equivalent circuit for the nonlinear device shownin Fig. 21. In the mechanical subcircuit, we chose to split thespring force into the linear term implemented as a capacitor andthe remaining nonlinear terms implemented as the behavioralsource Frn. The proof mass displacement is then representedby the charge on the capacitor. We have also implemented astopper force Fs which is not important at the accelerationlevels considered here, and it is therefore not further discussed.In the nonlinear model, both electrical ports are modeled.
We have fit the behavior of the equivalent circuit modelsimulated in SPICE to that of the measured device by adjustingthe phenomenological spring constants of the model until theresponses agree. The other parameters from the linear modelare kept as in Table II. We used the measurements at 0.16 g rmssinusoidal acceleration and 10-V bias to do the fit. The resultsare given in Table III.
We note that the linear stiffness of the spring suspensionagrees well with that found for the linear model in the previoussection.
The third-order stiffness is negative and explains the soft-ening spring behavior observed at intermediate displacementamplitudes. The positive fifth-order term represent the springstiffening at high amplitudes. The seventh-order term servesas a correction to increase the accuracy within the simulateddisplacement range. At very high amplitudes outside the rangethat we consider, its negative value means that the systemwill become unstable if not higher order terms that we haveneglected become dominant. At 4-μm displacement, the contri-bution from the seventh-order term in (21) is 34% of the fifth-order term. They become equal at a displacement of 6.87 μm.
The electromechanical coupling in this device increases thelinear stiffness as seen from the positive electrostatic correctionin (18). We have also calculated the electrostatic contributionto the open circuit third-order stiffness by expanding (6) to thethird order in the displacement. It is equal to 4α2C2
0/x20C
T0 .
Based on the parameters in Table III, we find that this coeffi-cient is more than four orders of magnitude smaller than that of

TVEDT et al.: NONLINEAR BEHAVIOR OF AN ELECTROSTATIC ENERGY HARVESTER UNDER WIDE- AND NARROWBAND EXCITATION 313
Fig. 22. Spring force obtained from fit of simulated nonlinear response toexperimental response compared to force on linear beam with the same linearstiffness.
Fig. 23. Up and down frequency sweep at 0.16 g rms excitation and10-V bias.
the fitted mechanical parameter k3, even at 15-V bias. Hence,we can be confident that the spring softening effect is not ofelectrostatic origin.
Fig. 22 shows the spring force versus the displacement as cal-culated from the coefficients listed in Table III. It is comparedto a linear spring with stiffness k1 from the table. Clearly, wehave with increasing magnitude the sequence 1) linear spring;2) softening spring; and 3) hardening spring.
Fig. 23 shows the simulation results for a frequency sweepat 0.16 g rms excitation with 10-V bias. Results from themeasurements are plotted for comparison. We observed thatthere is an overshoot phenomenon on down sweep which getssmeared if we calculate the rms value over a small interval.We therefore used the peak value instead. There is a goodcorrelation between the measured and simulated values, eventhe overshot phenomenon is reproduced.
The simulation result for the output voltage of the energyharvester is shown in Fig. 24, sweeping frequency at 0.21 g rmswith 10-V bias. The simulation reproduces more accurately the
Fig. 24. Up and down frequency sweep at 0.21 g rms excitation and 10 V bias.
Fig. 25. Up and down amplitude sweeps at 489-Hz excitation and 10-V bias.
jump down on up sweep, even though it changed as much as200 Hz from the previous case in Fig. 23.
Fig. 25 shows a simulation of an amplitude sweep comparedto experimental results. The qualitative features from the ex-periment are reproduced, such as the plateau on down sweep,but the amplitude, its slope, and the first jump frequency differsomewhat.
We also checked the model against measurements with wide-band acceleration. Fig. 26 shows the output PSD from simula-tions compared with the output PSD from the measurementsfor a high enough vibration strength that nonlinear effectsare apparent. Even though, the model fit was made for thesinusoidal vibrations, the simulations agree well except for thesmallest frequencies. This is true both for 10- and 5-V bias.
Fig. 27 shows the comparison of the output PSDs for twodifferent input acceleration PSD levels. The bandwidth of theoutput spectrum shows a quite dramatic increase from the low-est to the higher of the two excitations although the maximumPSD decreases. Change in spectral content is well representedby the simulation model.
The previous results show that the nonlinear device has aconsiderable output bandwidth for sufficiently strong random

314 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010
Fig. 26. PSD of the power output at 128 × 10−6 g2/Hz with 5- and10-V bias.
Fig. 27. PSD of the power output at 10-V bias with 128 × 10−6 g2/Hz and392 × 10−6 g2/Hz average acceleration PSD.
vibration. Since all the measurements are on the output, it isnot entirely obvious that the device actually harvest energy oversuch a wideband. As far as we know, one could hypothesize thatinternal (transduction) nonlinearities smear the output spectrumso that the output bandwidth is higher than that of the bandwidththat is harvested from. Because we have a model that we haveverified to represent the device well, we can check this bysimulation. We then estimate the real value of the cross spectraldensity between the fictitious force ma and the relative velocityv of the proof mass. We may interpret this entity as an inputPSD. Both the input and output PSDs of the energy harvesterare shown in Fig. 28. The input PSD is at least as broadbandedas the output PSD, hence the device actually harvest over a wideband of vibration frequencies.
V. DISCUSSION
The energy harvester investigated in this paper has severalproperties that are promising for frequency tolerant harvesting
Fig. 28. Simulated input PSD and measured output PSD at 10-V bias and392 × 10−6 g2/Hz average acceleration PSD.
from narrowband vibrations or for harvesting from widebandrandom vibrations.
The frequency sweeps have demonstrated that for sufficientlylarge vibrations, the device has a frequency range of ratherflat single valued response (Figs. 7 and 8). The single valuedresponse guarantees the output level within this range. In addi-tion, the multivalued response causes the up- and down-sweepbandwidths to be even larger than that of the unique response.This is advantageous when the vibration frequency change overtime [14].
Under broadband excitations, we have seen that the deviceresponds at first linearly, and then, with increasing vibrationlevel, the spectrum broadens considerably (Fig. 13). Hence,the device does not rely on high electromechanical coupling toachieve the high bandwidth. Although high coupling is a goal initself, it must be considered an advantage at the design stage thatbandwidth requirements to some extent can be decoupled fromthe achievable electromechanical coupling in the transducer.
The mechanical nonlinearities are due to suspension non-linearities. The harvester does not require impacts with me-chanical stoppers to generate the nonlinear response. Eventhough most harvester designs need some mechanical stoppersto ensure controlled behavior under overload conditions, wewould expect that devices that do not rely on frequent stopperimpacts as a working principle have a reliability advantage overthose that do.
The nonlinearities observed in our energy harvesting deviceare due to the quad beam support of the proof mass which giveseach beam a clamped-guided support. Large displacementsmust give tensile stress in the beams and consequently hard-ening springs. Based on our estimate of the electrostatic contri-bution to the third-order open circuit stiffness in Section IV-B,and on the insensitivity of the lower jump frequencies in Figs. 8and 9 to voltage variations, we can rule out electrostatic effectsas a reason for the softening spring behavior at intermediateamplitudes. It has to be mechanical in origin. Since there isno stress relief in this type of suspension, it is susceptible topackaging stress. We therefore believe that the nonlinear springbehavior is due to packaging stress.
The characteristic features of the combined force-displacement relation in Fig. 22, such as the regions of

TVEDT et al.: NONLINEAR BEHAVIOR OF AN ELECTROSTATIC ENERGY HARVESTER UNDER WIDE- AND NARROWBAND EXCITATION 315
softening or hardening behavior, can be designed for withoutrelying on beam prestress. There are design methods thatallow quite arbitrary force-deflection relations to be realized[31]. Our results therefore suggest careful nonlinear beamdesign as a means to enhance bandwidth of energy harvesters.In particular, softening spring effects are interesting becausethey potentially allow larger displacements and suppress thedominance of mechanical over electrostatic forces. Nonlineardesign is particularly interesting for devices that exploitin-plane motion because of the great freedom in shaping thebeam structure by layout.
VI. CONCLUSION
We have experimentally characterized and numerically ana-lyzed an energy harvester displaying rich nonlinear behavior.For narrowband excitations, we found several regions of multi-valued response when sweeping either amplitude or frequency.For broadband excitations, we found a considerable band-width enhancement upon increasing the vibration strength. Byequivalent circuit simulations, we fit model parameters to themeasured device behavior and verified that the model repro-duced the experiment also in cases which were not used inthe fit.
Both the detail analysis and the qualitative features of thedevice response show that the nonlinear behavior of the deviceis due to nonlinear behavior of the beam suspension. The resultssuggest that nonlinear spring behavior can be designed for asa means to increase device bandwidth and is a topic we willpursue in future work.
ACKNOWLEDGMENT
The authors would like to thank E. Westby and L.-C. Blystadfor useful and stimulating discussions.
REFERENCES
[1] S. P. Beeby, M. J. Tudor, and N. M. White, “Energy harvesting vibra-tion sources for microsystems applications,” Meas. Sci. Technol., vol. 17,no. 12, pp. R175–R195, Dec. 2006.
[2] P. D. Mitcheson, E. M. Yeatman, G. K. Rao, A. S. Holmes, andT. C. Green, “Energy harvesting from human and machine motion forwireless electronic devices,” Proc. IEEE, vol. 96, no. 9, pp. 1457–1486,Sep. 2008.
[3] C. B. Williams and R. B. Yates, “Analysis of a micro-electric generatorfor microsystems,” in Proc. 8th Int. Conf. Solid-State Sens. Actuators,Eurosensors IX, Transducers, 1995, vol. 1, pp. 369–372.
[4] R. Amirtharajah and A. P. Chandrakasan, “Self-powered signal processingusing vibration-based power generation,” IEEE J. Solid-State Circuits,vol. 33, no. 5, pp. 687–695, May 1998.
[5] S. Roundy, P. K. Wright, and J. Rabaey, “A study of low level vibrationsas a power source for wireless sensor nodes,” Comput. Commun., vol. 26,no. 11, pp. 1131–1144, Jul. 2003.
[6] T. von Büren, P. D. Mitcheson, T. C. Green, E. M. Yeatman,A. S. Holmes, and G. Tröster, “Optimization of inertial micropowergenerators for human walking motion,” IEEE Sensors J., vol. 6, no. 1,pp. 28–38, Feb. 2006.
[7] M. Löhndorf, T. Kvisterøy, E. Westby, and E. Halvorsen, “Evaluationof energy harvesting concepts for tire pressure monitoring systems,”in Tech. Dig. PowerMEMS, Freiburg, Germany, Nov. 28–29, 2007,pp. 331–334.
[8] P. D. Mitcheson, P. Miao, B. H. Stark, E. M. Yeatman, A. S. Holmes,and T. C. Green, “MEMS electrostatic micropower generator for low
frequency operation,” Sens. Actuators A, Phys., vol. 115, no. 2/3, pp. 523–529, Sep. 2004.
[9] Y. Naruse, N. Matsubara, K. Mabuchi, M. Izumi, and K. Honma, “Elec-trostatic micro power generator from low frequency vibration such ashuman motion,” in Tech. Dig. PowerMEMS +μEMS, Sendai, Japan,Nov. 9–12, 2008, pp. 19–22.
[10] M. Ferrari, V. Ferrari, M. Guizzetti, D. Marioli, and A. Taroni, “Piezoelec-tric multifrequency energy converter for power harvesting in autonomousmicrosystems,” Sens. Actuators A, Phys., vol. 142, no. 1, pp. 329–335,Mar. 2008.
[11] J.-Q. Liu, H.-B. Fang, Z.-Y. Xu, X.-H. Mao, X.-C. Shen, D. Chen, H. Liao,and B.-C. Cai, “A MEMS-based piezoelectric power generator array forvibration energy harvesting,” Microelectron. J., vol. 39, no. 5, pp. 802–806, May 2008.
[12] E. S. Leland and P. K. Wright, “Resonance tuning of piezoelectric vi-bration energy scavenging generators using compressive axial preload,”Smart Mater. Struct., vol. 15, no. 5, pp. 1413–1420, Oct. 2006.
[13] G. A. Lesieutre and C. L. Davis, “Can a coupling coefficient of a piezo-electric device be higher than those of its active material?,” J. Intell. Mater.Syst. Struct., vol. 8, no. 10, pp. 859–867, Oct. 1997.
[14] M. S. M. Soliman, E. M. Abdel-Rahman, E. F. El-Saadany, andR. R. Mansour, “A wideband vibration-based energy harvester,” J. Mi-cromech. Microeng., vol. 18, no. 11, p. 115 021, Nov. 2008.
[15] B. Marinkovic and H. Koser, “Smart Sand—A wide bandwidth vibrationenergy harvesting platform,” Appl. Phys. Lett., vol. 94, no. 10, p. 103 505,Mar. 2009.
[16] E. Lefeuvre, A. Badel, C. Richard, D. Guyomar, and L. Petit, “Optimiza-tion of piezoelectric electrical generators powered by random vibrations,”in Proc. Symp. Des., Test, Integr. Packag. MEMS/MOEMS-DTIP, LagoMaggiore, Italy, Apr. 26–28, 2006.
[17] H. A. Sodano, D. J. Inman, and G. Park, “Generation and storage ofelectricity from power harvesting devices,” J. Intell. Mater. Syst. Struct.,vol. 16, no. 1, pp. 67–75, Jan. 2005.
[18] S. Husa, L.-C. J. Blystad, T. Dong, and E. Halvorsen, “Measurement ofgas damping in an energy harvester with nonlinear transduction,” in Tech.Dig. PowerMEMS +μEMS, Sendai, Japan, Nov. 9–12, 2008, pp. 233–236.
[19] D. Hoffmann, B. Folkmer, and Y. Manolis, “Fabrication and charac-terization of electrostatic micro-generators,” in Tech. Dig. PowerMEMS+μEMS, Sendai, Japan, Nov. 9–12, 2008, pp. 15–18.
[20] S. Roundy, P. K. Wright, and J. M. Rabaey, Energy Scavenging for Wire-less Sensor Networks. Norwell, MA: Kluwer, 2004.
[21] S. Meninger, J. O. Mur-Miranda, R. Amirtharajah, A. P. Chandrakasan,and J. H. Lang, “Vibration-to-electric energy conversion,” IEEE Trans.Very Large Scale Integr. (VLSI) Syst., vol. 9, no. 1, pp. 64–76,Feb. 2001.
[22] T. Sterken, K. Baert, R. Puers, G. Borghs, and R. Mertens, “A newpower MEMS component with variable capacitance,” in Proc. Pan PacificMicroelectron. Symp., 2003, pp. 27–34.
[23] F. Peano and T. Tambosso, “Design and optimization of a MEMS electret-based capacitive energy scavenger,” J. Microelectromech. Syst., vol. 14,no. 3, pp. 429–435, Jun. 2005.
[24] F. Peano, G. Coppa, C. Serazio, F. Peinetti, and A. D’angola, “Non-linear oscillations in a MEMS energy scavenger,” Math. Comput. Model.,vol. 43, no. 11/12, pp. 1412–1423, Jun. 2006.
[25] L. G. W. Tvedt, L.-C. J. Blystad, and E. Halvorsen, “Simulation of an elec-trostatic energy harvester at large amplitude narrow and wide band vibra-tions,” in Proc. Symp. Des., Test., Integr. Packag. MEMS/MOEMS—DTIP,Nice, France, Apr. 9–11, 2008, pp. 296–301.
[26] L. G. W. Tvedt, “Design, modeling and characterization of a MEMS elec-trostatic energy harvester,” M.S. thesis, Vestfold Univ. College, Horten,Norway, 2008.
[27] MEMSOI: MPW on 60 μm thick SOI HARM, Crolles, France: Tron-ics Microsystems, 2006. [Online]. Available: http://www.tronics.fr/mems-technology/soi-mems-drie-bulk-micromachining.html
[28] I. Kuehne, A. Frey, D. Marinkovic, G. Eckstein, and H. Seidel, “PowerMEMS—A capacitive vibration- to-electrical energy converter with built-in voltage,” Sens. Actuators A, Phys., vol. 142, no. 1, pp. 263–269,Mar. 2008.
[29] W. Ma, R. Zhu, L. Rufer, Y. Zohar, and M. Wong, “An integrated floating-electrode electric microgenerator,” J. Microelectromech. Syst., vol. 16,no. 1, pp. 29–37, Feb. 2007.
[30] E. Halvorsen, “Energy harvesters driven by broadband random vi-brations,” J. Microelectromech. Syst., vol. 17, no. 5, pp. 1061–1071,Oct. 2008.
[31] C. V. Jutte and S. Kota, “Design of nonlinear springs for prescribed load-displacement functions,” ASME J. Mech. Des., vol. 130, no. 8, p. 081 403,Aug. 2008.

316 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 19, NO. 2, APRIL 2010
Lars Geir Whist Tvedt received the M.S. degreein microsystem technology from the Institute forMicrosystem Technology, Faculty of Science andEngineering, Vestfold University College, Horten,Norway, in 2008.
Since August 2008, he has been a ResearchScientist in the Department of Microsystems andNanotechnology, The Foundation for Scientific andIndustrial Research at the Norwegian Institute ofTechnology, Information and Communication Tech-nology, Oslo, Norway. His current main research
interest is in microsystems design and characterization as well as energyharvesting.
Duy Son Nguyen received the B.E. and M.E.degrees in electronics from Ho Chi Minh City Uni-versity of Technology, Ho Chi Minh City, Vietnam,in 2004 and 2006, respectively. Since 2008, he hasbeen working toward the Ph.D. degree in the Fac-ulty of Science and Engineering, Vestfold UniversityCollege, Horten, Norway, focusing on electrostaticMEMS energy harvesting.
Einar Halvorsen (M’03) received the Siv. Ing. de-gree in physical electronics from the NorwegianInstitute of Technology, Trondheim, Norway, in1991, and the Dr. Ing. degree in physics from theNorwegian University of Science and Technology(NTNU), Trondheim, in 1996.
He has worked both in academia and the mi-croelectronics industry. Since 2004, he has been anAssociate Professor in the Institute for MicrosystemTechnology, Faculty of Science and Engineering,Vestfold University College, Horten, Norway. His
current main research interest is in theory, design, and modeling of micro-electromechanical devices.