Embed Size (px)
Citation preview

1
NETWORK TOPOLOGIES FOR DISTRIBUTED SPACE SYSTEMS WITH PERTURBED DISTANCE-BOUNDED RELATIVE MOTION
Jing Chu,* Jian Guo,† and Eberhard K.A. Gill‡
Since the network topology of a distributed space system depends on relative
distances among satellites, an analysis of the frequency of relative motion and
distance variations is crucial to the evaluation of the properties of the network
topology. This paper analyses how perturbed distance-bounded relative motion
affects the properties of the network topology. For this purpose, the approximat-
ed separable Hamiltonian that includes secular terms, short-periodic terms and
long-periodic terms caused by the perturbation is exploited to describe the ab-
solute motion of a satellite, and the action-angle variables are used to derive the
nodal period as well as the drift of right ascension of ascending node (RAAN)
per nodal period. The distance-bounded relative motion is established once the
nodal period and the drift of RAAN per nodal period are matched, respectively.
Subsequently, the relative motion model is employed to analyze the characteris-
tics of the distance-bounded relative motion. The properties of the network to-
pology are analyzed by using the graph theory. In such a way, the evolution of
the network topology is obtained which includes the adjacency matrix and the
Laplacian matrix. In addition, the eigenvalues of the Laplacian matrix are de-
termined, which reveals the properties of the network topology.
INTRODUCTION
For more than one decade distributed space systems (DSS) have been envisioned, designed,
developed and exploited as space assets for a variety of novel applications that are not possible
with single satellites. Meanwhile, with the advent of miniaturized satellite systems and as the
underlying miniaturization technology becoming more and more mature and space-proved, DSS
would gain huge momentum by making use of small satellites, for example, to render the entire
mission much more cost-effective. Compared to traditional space systems, DSS consists of multi-
ple smaller satellites flying in formations1, constellations
2, swarms
3 or fractionated clusters
4. By
virtue of DSS, the space assets embrace non-traditional attributes such as flexibility, robustness
and responsiveness.4 To ensure those non-traditional attributes, distributed communication and
distributed computing among multiple satellites are required to enhance cooperation within DSS
and utilize autonomy.5 Note that it is the combination of autonomous operations of each satellite
* Ph.D. candidate, Chair of Space Systems Engineering, Faculty of Aerospace Engineering, Delft University of Tech-
nology, Kluyverweg 1, 2629 HS Delft, The Netherlands. † Assistant professor, Ph.D., Chair of Space Systems Engineering, Faculty of Aerospace Engineering, Delft University
of Technology, Kluyverweg 1, 2629 HS Delft, The Netherlands. ‡‡ Professor, Ph.D., Head of Space Department at Faculty of Aerospace Engineering, Delft University of Technology,
Kluyverweg 1, 2629 HS Delft, The Netherlands..
IAA-AAS-DyCoSS2-01-06

2
and cooperation between satellites in DSS that ensures the whole system to accomplish complex
goals effectively and efficiently.
Take the autonomous reconfiguration of DSS as an example. Autonomous reconfiguration op-
erations are prerequisite for non-traditional attributes of DSS, and may be performed in the cases
of achieving new mission objectives, avoiding debris or adding new satellites to the original sys-
tem. There are primarily three aspects of reconfiguration.6 The first one is the generation of the
set of new configuration candidates that satisfy the requirements of the input from the environ-
ment, such as mission objectives from the ground station or a debris-like threat sensed by the
system itself. The second one is the assignment of the allowable position in the generated config-
uration candidates to the individual satellite in DSS. The third one is the design of reconfiguration
trajectory to move a satellite from its current configuration to the assigned location. The former
two aspects require cooperation between satellites, while the third one mainly involves local op-
erations. However, those three aspects are tightly coupled. Note that aforementioned three aspects
are always preferred to be fuel-optimized or time-optimized.5
As seen from the reconfiguration example, autonomous operations and cooperation within
DSS rely on the developed algorithms, for example, to assign allowable positions to satellites in a
fuel-optimized or time-optimized way. Generally speaking, autonomous algorithms for DSS can
be implemented in a centralized7, 8
, distributed9 or mixed way
5, 10. For the centralized implementa-
tion, all the information of satellites and the environment shall be transmitted to a single point for
processing and keep unchanged during processing. On contrast, there isn’t any global exchange
of information for the distributed implementation. Instead, communication is only within neigh-
bors. However, the network topology shall feature certain characteristics such as connectivity to
ensure the performances of distributed algorithms. Lying between the centralized and distributed
implementation is the mixed approach, where both local and global communication coexist. It is
observed that no matter the algorithm is centralized, distributed or mixed, the network topology
plays a key role for the implementation of those algorithms. However, most research in the litera-
ture only assumes certain network topology of DSS to design the autonomous algorithms.5,7,8,9,10
This paper focuses on the relations of network topology to distributed algorithms for DSS.
The objective of this paper is to analyze how perturbed distance-bounded relative motion affects
the properties of the network topology of DSS. For DSS the distance-bounded relative motion is
essential, for example, to establish wireless networks, to avoid collisions among satellites and to
minimize propellant usage. Distance-bounded relative motion can be achieved by matching the
nodal periods and the drifts of the Right Ascension of Ascending Node (RAAN) per nodal period
for different orbits.11
Since the network topology of DSS depends on relative distances among
satellites, an analysis of the frequency of relative motion and distance variations is crucial to the
evaluation of the properties of the network topology. If the network topology is represented by a
graph, then the properties include the algebraic connectivity, resistance, and the eigenvalues of
the graph’s Laplacian matrix, all of which impact the performance of various distributed algo-
rithms.12 ,13
The approach here is to use an approximated separable Hamiltonian to describe the long-term
absolute motion of a satellite, which includes secular terms, short-periodic terms and long-
periodic terms caused by the perturbation. For the separable Hamiltonian, action-angle varia-
bles are defined to derive the nodal period and the drift of RAAN per nodal period, which are
matched, respectively, between two orbits to establish the distance-bounded relative motion. Then
based on the model of relative motion the frequency and distance variations of relative motion are
analysed numerically. After that, the network topology is represented by a graph, which leads to
the application of graph theory to the property analysis of network topology. In such a way, this

3
paper bridges the gap between orbital dynamics in the presence of perturbations and the network
topology of DSS. It provides a performance evaluation of various distributed algorithms, which
quantitatively determines the properties of network topology for distance-bounded relative mo-
tion. By this, it contributes to an improved mission analysis and design for DSS.
This paper is organized as follows. First, the methodology to establish distance-bounded rela-
tive motion is presented. This is followed by the derivation of the model for distance-bounded
relative motion, whose frequency as well as distance variations are analysed. The next section
addresses the properties of network topology of distance-bounded relative motion. In the end,
conclusions are drawn.
ESTABLISHEMNT OF DISTANCE-BOUNDED RELATIVE MOTION
This section presents the methodology to establish the distance-bounded relative motion, i.e.,
by matching , respectively, the nodal periods and the drifts of RAAN per nodal period of two
orbits. In order to derive the nodal period and the drift of RAAN per nodal period, a separable
Hamiltonian is employed which includes secular terms, short-periodic terms and long-periodic
terms caused by the perturbation. After that, by virtue of the separable form of the Hamiltoni-
an, action-angle variables are made use of to derive the frequencies of the perturbed orbital mo-
tion, which leads to the derivation of the nodal period and the drift of RAAN per nodal period. In
the end of this section, the method to match the nodal periods as well as the drifts of RAAN per
nodal period is presented.
Hamiltonian of the -Perturbed Orbital Dynamics
The Hamiltonian for the orbital dynamics of the satellite moving in the -perturbed Earth’s
gravitational field is defined by the spherical coordinates as follows.
22 2
2 22
2 2 2 3
1, , , , , ( ) (3sin 1)
2 cos 2
Er r
pp J RH r p p p p
r r r r
(1)
where is the radius, is the azimuth angle (for example, the longitude), is the latitude,
are the conjugate momenta, is the gravitational constant of the Earth, is the second-
order zonal harmonics, is the Earth’s mean equatorial radius. Due to cubed in the denomina-
tor of the -perturbed gravitational term, Eq. (1) is not fully separable.14
In order to make Eq.(1)
consistent with the full separation form, for long-term orbital motion ⁄ may be approximated
by its time average with respect to the true anomaly .
2
20
1 1 1 1 1 1 1( )
2 (1 ) 2average a p
dfr r a e r r
(2)
where is the semi-major axis, is the eccentricity, and are the radius at the perigee and
apogee, respectively. Then, the full separable Hamiltonian for the -perturbed dynamics is
22
2
2 2 2
2 22 2 22 2
2 2
1, , , , , ( )
2 cos
33 1[1 (1 sin ) (sin sin )]
2 2 2 (1 ) 2
r r
E E
ppH r p p p p
r r
J R J Ri i
r r ra e
(3)
where is the inclination. Note that the Hamiltonian in Eq.(3) includes the secular, short-periodic
and long-periodic terms caused by the perturbation. In the following sections the units of

4
length and time are non-dimensionalized by the characteristic length and the characteristic
time √ ⁄ , respectively. Then the gravitational constant of the Earth equals to one. The Hamil-
ton’s characteristic function of the fully separable Hamiltonian in Eq.(3) is15
2 2 2
1 2 2 2
2
2 2 ( )sec ( ) 2 ( )
r
r
r r U rW dr U d
r
(4)
with
221 2
2 222 2
1 3( ) [1 (1 sin )]
2 2
3 1( ) (sin sin )
2 (1 ) 2
JU r i
r r
JU i
a e
(5)
where the constant is the total energy, the constant is the polar component of the angular
momentum, and the constant is the angular momentum.
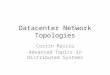
As an example the orbit revolution and the time history of orbital elements of the orbit
under the approximated Hamilto-
nian during approximately a month are shown in Figure 1. As shown in Figure 1, in addition to
the secular drifts, all the orbital elements are subject to long-periodic and short-periodic oscilla-
tions.
Figure 1. Orbit Revolution and Time History of Orbital Elements of the Example Orbit
Action-Angle Variables
Essentially, the nodal period and the drift of RAAN per nodal period play key roles for the es-
tablishment of distance-bounded relative motion. Since the Hamiltonian is fully separable, the
-1-0.5
00.5
1
x 107
-1-0.5
00.5
1
x 107
-1
0
1
x 107
X(m)
Orbit Revolution
Y(m)
Z(m
)
0 0.5 1 1.5 2 2.5 3
x 104
7.178
7.18
7.182
7.184
7.186
7.188
7.19x 10
6
Dimensionalized time
a(m
)
Semimajor Axis
0 0.5 1 1.5 2 2.5 3
x 104
0.775
0.7752
0.7754
0.7756
0.7758
0.776
0.7762
Dimensionalized time
i(ra
d)
Inclination
0 0.5 1 1.5 2 2.5 3
x 104
0
0.2
0.4
0.6
0.8
1x 10
-3
Dimensionalized time
e
Eccentricity
0 0.5 1 1.5 2 2.5 3
x 104
3.5
4
4.5
5
5.5
6
6.5
Dimensionalized time
RA
AN
(rad)
RAAN
0 0.5 1 1.5 2 2.5 3
x 104
0
2
4
6
8
Dimensionalized time
AoP
(rad)
Argument of Perigee

5
action-angle variables can be taken advantage of to obtain the frequencies of the system even
without finding the complete solution of the orbital motion that is disturbed by the approximated
gravitational potential.
The action variables are defined as15
2
22
3 2
2 2 2 2 22
2
1 32 2 (1 sin )
2
3 1sec ( ) (sin sin )
(1 ) 2
r r
JWJ dr i dr
r r r r
WJ d d
JWJ d i d
a e
(6)
And the angle variables are defined as
r r
Ww p
r
Ww p
Ww p
(7)
Once the Hamiltonian is determined as a function of the action variables
( , , )rH H J J J (8)
the frequencies of the system can be derived as the derivatives of with respect to the action
variables.
( , , )
( , , )
( , , )
r
r
r
r
r
H J J J
J
H J J J
J
H J J J
J
(9)
Nodal Period and Drift of RAAN per Nodal Period
Instead of performing the contour integration in Eq.(6) and then deriving the Hamiltonian in
terms of the action variables, the Jacobian matrix and its inverse are taken advantage of to derive
the anomalistic, sidereal and nodal periods. And then the drift of RAAN per nodal period can be
calculated by using those periods.
The second integral in Eq.(6) is simple
2 2J p (10)
Then the Jacobian matrix of the action variables with respect to , and can be written
as

6
0
0 2 0
0
r r r
r
r r r
r
r
J J J
J A BJ J J
J
J C DJ J J
(11)
where the elliptical integrals , , and can be calculated based on the Carlson’s method.16
Afterwards the Jacobian matrix is inverted to yield the anomalistic, sidereal and nodal frequencies
1
2
rr
r
r
r
J A
BC
J AD
B
J AD
(12)
And the nodal period is
AD
PB
(13)
The drift of RAAN per nodal period can be calculated as follows based on the sidereal fre-
quency and the nodal period.
2 2 2D P C (14)
Finally, as key ingredients to the establishment of the long-term distance-bounded relative mo-
tion, the nodal period and the drift of RAAN per nodal period are listed in Eq.(15) for future ref-
erences.
2
ADP
B
D C
(15)
Establishment of Distance-Bounded Relative Motion
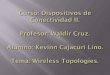
The distance-bounded relative motion is established by matching and , respectively. In
order to find the orbits with identical and , is expressed as a function of in a graph.11
In such a way, the intersection points between two different curves in that graph represent the
matched cases, which is shown in Figure 2 as an example. In Figure 2 the dashed curves present
the nodal periods and the drifts of RAAN per nodal period of pseudo circular orbits, while the
solid curves present those of pseudo elliptical orbits. Note that the intersection points between
dashed curves represent the same orbit. Therefore, in Figure 2 only the intersection points be-
tween the solid and the dashed curves can be exploited to establish the distance-bounded relative
motion, i.e., the distance-bounded relative motion is established between a pseudo circular orbit
and a pseudo elliptical orbit. For example, the intersection point between the dashed curve
and the solid curve shown in Figure 2 is such a point.

7
Figure 2. Nodal Period and Drift of RAAN per Nodal Period
MODEL OF RELATIVE MOTION
In this section the model of relative motion is presented, which is based on the geometric rela-
tionship between two satellites.17
The model is valid for eccentric reference orbits as well as rela-
tive distances of large magnitude (on the order of tens or even hundreds of kilometers). Besides,
the presented model of relative motion is concise and provides certain physical insights.
The geometric relationship between two satellites, i.e., chief and deputy, is shown in Figure 3.
The subscript and stand for the chief and deputy satellite, respectively. As shown in Figure 3,
the orbits of two satellites are projected on a celestial sphere, the origin of which is the center of
the Earth. The ascending nodes of the chief and deputy satellites are denoted by and , re-
spectively. The chief’s RAAN is , while the one of the deputy is , and the difference be-
tween and is defined as , i.e., . The angle between the two orbital planes
is , which must not be confused with the arithmetic inclination difference that is defined as
. The perigee of the chief satellite is marked as the point . One intersection point
of those two projected orbits on the surface of the celestial sphere is .The arc lengths between and the ascending nodes and are and , respectively. The relative angular positions
of the chief and deputy satellite with respect to are denoted as and , respectively. The rela-
tive angular position of the deputy with respect to the chief is represented via the azimuth angle,
, and the elevation angle, . The azimuth angle is measured counterclockwise as seen from the
pole of the chief orbit and covers all the values between 0 and . The elevation angle is restrict-
ed to ⁄ to ⁄ .
The inertial reference frame { }, and the local vertical and local horizontal (LVLH)
reference frame, { }, are defined to describe the absolute orbital motion and the relative
motion, respectively. The inertial reference frame is defined as follows. The origin, , is located
at the center of the Earth. The axis , points towards the vernal equinox. The axis , is along
the Earth’s rotation axis, perpendicular to the Earth’s equatorial plane. The axis , lies in the
Earth’s equatorial plane and completes the right-hand reference frame. The LVLH reference
frame { } is defined as follows. The origin of the frame is centered on the center of mass
-0.26 -0.255 -0.25 -0.245 -0.24 -0.2358.76
8.765
8.77
8.775
8.78
8.785
8.79
8.795
8.8
8.805Nodal Period and Drift of RAAN of Pseudo-Circular and Pseudo-Elliptical Orbits
Drift of RAAN per Nodal Period (deg)
Nodal P
eriod
P
B
A
C
D
E F
i=48.6
i=50.6
i=49.6
i=47.6
i=46.6
r =-0.399
r =-0.3991
r =-0.3992
r =-0.3993
r =-0.3994
r =-0.3995
r =-0.3996
r =-0.3997
r =-0.3998
r =-0.3999
r =-0.4
pseudoelliptical orbits, r =-0.3992, i=48.6, e=[0, 0.138]
pseudoelliptical orbits, r =-0.3995, i=50.6, e=[0, 0.196]
pseudoelliptical orbits, r =-0.3998, i=50.6, e=[0, 0.196]
pseudoelliptical orbits, r =-0.4, i=49.6, e=[0, 0.17]

8
(CM) of the chief satellite. The vector points radially outward, while the vector is parallel
to the orbit momentum vector of the chief satellite in the orbit normal direction. The vector
completes the right-hand reference frame (positive in the velocity direction of the chief space-
craft).
Earth’s Equatorial Plane
Chief’s Orbit on Celestial Sphere
Deputy’s Orbit on Celestial Sphere
O
Ci Di
i
CN DN
CP
X
IX
IY
IZ
D
C
D
C
DCCD
I
DS
Figure 3. Geometric Relationship between two Satellites
The relative position of the deputy with respect to the chief in the LVLH reference frame can
be written as the functions of and
cos cos
cos sin
sin
D C
D
D
x r r
y r
z r
(16)
where and are the radius of the chief and deputy satellite, respectively. Based on the geo-
metric relationship between two satellites, the angles and are expressed as
arctan(cos tan )
arcsin(sin sin )
D C
D
i
i
(17)
Substituting Eq.(16) into Eq.(17), the relative motion between the chief and the deputy can be
expressed in the LVLH reference frame based on the geometric relationship.
1 cos cos( ) 1 cos cos( )2
1 cos sin( ) 1 cos sin( )2
sin sin
DC D C D C
DC D C D
D D
rx i i r
ry i i
z r i
(18)
The angular position between the satellite and the intersection point can be related to the or-
bital elements via

9
, ,i i i i i if f i C D (19)
where is the argument of the perigee, is the true anomaly, and is the arc length between the
intersection point and the perigee of the satellite, i.e., . and can be calculated as
follows.
sinsin sin
sin
sinsin sin
sin
C D
D C
ii
ii
(20)
The angle between two orbital planes can be written in terms of the inclinations of two or-
bits and
cos cos cos sin sin cosC D C Di i i i i (21)
NETWORK TOPOLOGIES OF DISTANCE-BOUNDED RELATIVE MOTION
In this section the properties of network topologies of distance-bounded relative motion are
analyzed. We consider a DSS of satellites with orbital dynamics described by the Hamiltonian
shown in Eq. (3), and their nodal periods as well as the drifts of RAAN per nodal period are
matched to each other. The relative motion between two satellites is described by Eq.(18). The
network model assumes that the connection between two adjacent satellites is determined by their
Euclidean distance, i.e., if their relative distance is less than a threshold, then there is a connection
between them. In order to analyze the properties of such a network topology, the frequencies of
the relative motion and the distance variations are studied firstly based on simulation results.
Then, by denoting the network as a graph, the adjacency matrix as well as the Laplacian matrix of
the graph shows the properties of the network topology.
Graph Denotation of the Network
The connected network is denoted by a simple, undirected graph , where the vertex
set represents the set of satellites in the DSS and the set of edges can be interpreted as
the set of connections between satellites. The adjacency matrix of graph is deter-
mined by the edges of with entries if { } and otherwise. Furthermore,
the relationship between { } and is determined by the Euclidean distance between two sat-
ellites as follows.
{ , } ,
, , 1,2,...,{ , } ,
i j ij
i j ij
v v E if di j n
v v E if d
(22)
where is the Euclidean distance between two satellites and , and is a fixed range threshold
determined by the communication capability of each satellite. Since the graph is simple, ,
and because it is undirected, is symmetric. The normalized adjacency matrix of is de-
fined as ∑ . Then the normalized Laplacian matrix (for short Laplacian matrix)
of graph is defined as , where is the identity matrix of order . The ei-
genvalues of play an important roles in the development of various distributed algorithms
that are based on the connected network. For undirected graphs the eigenvalues of the normalized
Laplacian matrix are real, and they are located between 0 and 2.18
Thus the eigenvalues of can be denoted by . It is well known that is a
necessary and sufficient condition for the connectivity of a graph .

10
An example of the undirected graph is shown in Figure 4. Its adjacency matrix , normalized
adjacency matrix and Laplacian matrix are shown as follows. The eigenvalues of the Lapla-
cian matrix are √ ⁄ ⁄ √ ⁄ . Therefore, the graph shown in
Figure 4 is connected.
0 0 1 1 0 0 0 1 2 1 2 0 1 0 1 2 1 2 0
0 0 1 0 0 0 0 1 0 0 0 1 1 0 0
, ,1 1 0 1 0 1 3 1 3 0 1 3 0 1 3 1 3 1 1 3 0
1 0 1 0 1 1 3 0 1 3 0 1 3 1 3 0 1 3 1 1 3
0 0 0 1 0 0 0 0 1 0 0 0 0 1 1
A
A L (23)
1
2 3 4 5
Figure 4. An Example of Undirected Graph
Analysis of Distance-Bounded Relative Motion
The frequencies and the distance variations of the distance-bounded relative motion are ana-
lyzed through an example. The distance-bounded relative motion is established between the fol-
lowing two orbits where the deputy is and the chief is
. The matched nodal period and the drift of RAAN per nodal period are
and , respectively. The anomalistic and sidereal period of the
chief satellite are , and , respectively. The anomalistic and side-
real period of the deputy satellite are , and , respectively. For
the analysis of the relative motion, the parameters in Eq.(18) are calculated by transforming the
spherical coordinates in the Hamiltonian to the osculating orbital elements firstly and then to the
relative geometric parameters. The relative distances and the relative motion between those two
satellites over one anomalistic period are shown Figure 5 and Figure 6, respectively. The relative
distances and the relative motion between those two satellites over approximately one month are
shown in Figure 7 and Figure 8, respectively. For the long-term distance-bounded relative mo-
tion, the in-plane motion is shown in Figure 9, while the relative motion in the plane and
plane are shown in Figure 10 and Figure 11, respectively. Note that since the unit of
time is dimensionalized, the step of the simulation plays an important role to ensure the bound-
ness of the relative motion. For example, in our simulation the step is set to be 0.001 while the
simulation step of 0.01 would make the relative motion diverge, which is because that the unit
time is √ ⁄ .
The frequency spectra for the relative motion in the Chief’s LVLH coordinate frame can be im-
plemented by the numerical tool of fast Fourier transform.11
In this paper the frequency analysis
is only performed based on the simulation results. As shown in Figure 5, the period of the relative
distances in the distance-bounded relative motion is half of the anomalistic period. For the exam-
ple Chief and Deputy orbits, the satellites are located in the equatorial plane at the initial time,
and . Therefore, at the beginning the relative distance between those two satellites is the
minimum. Since the nodal period is matched, those two satellites are in the next minimum dis-

11
tance at the descending node. After that, since the nodal period and the drifts of RAAN per nodal
period are matched, those two satellites arrive at the ascending node at the same time to achieve
another minimum distance. The relative motions in the in-plane, plane and
plane are also shown in Figure 6, and their periods are the same as the anomalistic period. For the
long-term distance-bounded relative motion, the relative distances are bounded as shown in Fig-
ure 7. Based on the simulation results shown in Figure 8, 9, 10 and 11, the relative motion in long
terms (e.g. one month) is bounded and thus the period is also the same as the anomalistic period.
In the next subsection, the properties of the network topology of distance-bounded relative mo-
tion are analyzed based on the distance variations shown above.
Figure 5 Relative Distances of Distance-Bounded Relative Motion over One Period
Figure 6 Relative Motion of Distance-Bounded Relative Motion over One Period
0 1000 2000 3000 4000 5000 6000 7000 80004
5
6
7
8
9
10x 10
5
Time(dimensionalized)
Rel
ati
ve
Dis
tan
ce (
m)
-5-4
-3-2
-10
12
34
5
x 105
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
x 106
-8
-6
-4
-2
0
2
4
6
8
x 104
Radial(m)Along-Track(m)
Cro
ss-T
rack
(m)

12
Figure 7 Relative Distances of Distance-Bounded Relative Motion over One Month
Figure 8 Relative Motion of Distance-Bounded Relative Motion over One Month
Figure 9 Long-Term in-Plane Relative Motion over One Month
-5 -4 -3 -2 -1 0 1 2 3 4 5
x 105
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1x 10
6
Radial(m)
Alo
ng-T
rack(m
)
3.1 3.12 3.14
x 105
6.94
6.96
6.98
7
7.02
7.04
x 105
Magnified view of the boundnessof the in-plane relative motion

13
Figure 10 Long-Term Relative Motion in Plane over One Month
Figure 11 Long-Term Relative Motion in Plane over One Month
Network Topologies of the Distance-Bounded Relative Motion
In order to study the properties of network topologies for the distance-bounded relative mo-
tion, four satellites are defined. The range threshold is defined as the average of the relative dis-
tance between satellites. The locations of a satellite in the pseudo-circular orbits can be specified
by the latitude , which uniquely defines the conjugate momentum . For pseudo-elliptical or-
bits, the orbital locations can also be specified by the latitude as well, based on which the radius
and the conjugate momenta and can be calculated. The four satellites are Chief with
-5 -4 -3 -2 -1 0 1 2 3 4 5
x 105
-8
-6
-4
-2
0
2
4
6
8x 10
4
Radial(m)
Cro
ss-T
rack(m
)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
x 106
-8
-6
-4
-2
0
2
4
6
8x 10
4
Along-Track(m)
Cro
ss-T
rack(m
)

14
( ), Deputy 1 with
( ),
Deputy 2 with and
Deputy 3 with . Note that the relative motion between Chief and Deputy 2 are
analyzed previously. Deputy 1 is in the same orbit as the Chief and is 0.001rad after in terms of
the latitude with relative distances shown in Figure 12, while Deputy 3 is in the same orbit as
Deputy 2 and is 0.0013rad after in terms of the latitude with relative distances shown in Figure
13.
Figure 12 Relative Distances between Chief and Deputy 1
Figure 13 Relative Distances between Deputy 2 and 3
0 1000 2000 3000 4000 5000 6000 7000 80001.0246
1.0247
1.0248
1.0249
1.025
1.0251
1.0252
1.0253x 10
4
Time(dimensionalized)
Rela
tive D
ista
nce(m
) betw
een C
hie
f and D
eputy
1
0 1000 2000 3000 4000 5000 6000 7000 80001.12
1.14
1.16
1.18
1.2
1.22
1.24
1.26
1.28
1.3x 10
4
Time(dimensionalize)
Rela
tive D
ista
nces b
etw
een D
eputy
2 a
nd 3
(m)

15
Based on the analysis of the distance-bounded relative motion, the properties of the network
topology need only to be evaluated in one anomalistic period. Under the condition of the network
connection shown in Eq.(22), the network topology is formed and the time history of the second
eigenvalues are shown in Figure 14. Since is the necessary and sufficient condition for
the connectivity of a graph , it can be concluded based on Figure 14 that the network consisting
of aforementioned four satellites is connected for only half of the anomalistic period, and most of
the time is fully connected. Therefore, for the -perturbed relative motion, as long as the nodal
period and the drift of RAAN per nodal period are matched, respectively, a connected network
topology can be established in long time.
Figure 14 Time History of the Second Eigenvalues of the Laplacian Matrix
CONCLUSION
This paper bridges the gap between orbital dynamics in the presence of perturbations and the
network topology of distributed space systems numerically. With the approximated Hamiltonian
that includes secular terms, short-periodic terms and long-periodic terms caused by the pertur-
bation, distance-bounded relative motion can be established by matching, respectively, the nodal
period and the drift of RAAN per nodal period. Based on the analysis of the period and distance
variations of the distance-bounded relative motion, the properties of the network topology are
investigated in only one anomalistic period. When the range threshold of the network is defined
as the average of relative distances, an example is presented to show that the network is connect-
ed for half an anomalistic period. By knowing the connectivity of the network topology, distribut-
ed algorithms can be designed and tailored for autonomous operations of the distributed space
system. The methodology presented in this paper provides a performance evaluation of various
distributed algorithms, which quantitatively determines the properties of network topology for
distance-bounded relative motion. By this, it contributes to an improved mission analysis and
design for distributed space systems.
REFERENCES
1 S. Persson, S. Veldman, and P. Bodin, “PRISMA: A formation flying project in implementation phase.” Acta Astro-
nautica, Vol. 65, 2009, pp. 1360-1374.
0 1000 2000 3000 4000 5000 6000 7000 80000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Time(dimensionalized)
Sec
on
d E
igen
valu
e

16
2 T. Schetter, M. Campbell, and D. Surka, “Multiple Agent-Based Autonomy for Satellite Constellations.” Artificial
Intelligence, Vol.145, Issues 1-2, 2003, Pages 147-180.
3 M. G. Hinchey, J. L. Rash, W. F. Truszkowski, C. A. Rouff, and R. Sterrit, “Autonomous and autonomic swarms.”
The 2005 International Conference on Software Engineering Research and Practice (SERP’05), 2005, pages 36–42,
Las Vegas, USA.
4 Brown, “Fractionated Space Architectures: A Vision for Responsive Space.” 4th Responsive Space Conference, April
24-27, 2006, Los Angels, USA.
5 M. E. Campbell, “Planning Algorithms for Multiple Satellite Clusters.” Journal of Guidance, Control, and Dynamics,
Vol. 26, No. 5, 2003, pp. 770-780.
6 D. P. Scharf, F. Y. Hadaegh, and S. R. Ploen, “A survey of space formation flying guidance and control (part I),” in
Proceedings of the American Control Conference, June 2004, Boston, USA.
7 O. L. Weck, U. Scialom, and A. Siddiqi, “Optimal Reconfiguration of Satellite Constellations with the Auction Algo-
rithm.” Acta Astronautica, Vol. 62, No. 2-3, 2008, pp.112-130.
8 A. Richards, T. Schouwenaars, J. P. How, and E. Feron, “Spacecraft Trajectory Planning with Avoidance Constraints
Using Mixed-Integer Linear Programming.” Journal of Guidance, Control, and Dynamics, Vol. 25, No. 4, 2002, pp.
755-764.
9 G. Yang, Q. Yang, V. Kapila, D. Palmer, and R. Vaidyanathan, “Fuel Optimal Maneuvers for Multiple Spacecraft
Formation Reconfiguration Using Multi-Agent Optimization.” International Journal of Robust and Nonlinear Control,
Vol. 12, No. 2-3, 2002, pp. 243-283.
10 M. Tillersion, G. Inalhan, and J. P. How, “Coordination and Control of Distributed Spacecraft Systems Using Con-
vex Optimization Techniques.” International Journal of Robust and Nonlinear Control, Vol. 12, No. 2-3, 2002, pp.
207-242.
11 M. Xu, Y. Wang, and S. Xu, “On the existence of invariant relative orbits from the dynamical system point of
view.” Celestial Mechanics and Dynamical Astronomy, Vol. 112, No. 4, 2012, pp. 427-444.
12 R. Dai, J. Maximoff, and M. Mesbahi, “Optimal Trajectory Generation for Establishing Connectivity in Proximity
Networks.” Aerospace and Electronic Systems, IEEE Transactions on, vol.49, no.3, 2013, pp.1968-1981.
13 R. O. Asber, J. A. Fax, and R. M. Murray, “Consensus and Cooperation in Networked Multi-Agent System”, Pro-
ceedings of The IEEE, Vol. 95, No. 1, 2007, pp. 215-233.
14 A. E. Roy, “Orbital Motion 3rd ed.” Institute of Physics Publishing, 1988, London.
15 H. Goldstein, “Classical Mechanics 2nd ed”, Addison-Wesley Publishing Company, 1981, Canada.
16 B. C. Carlson, “A Table of Elliptic Integrals: Cubic Cases.” Mathematics of Computation, Vol. 53, No. 187, 1989,
pp. 327-333.
17 S. S. Lee, “Dynamics and Control of Satellite Relative Motion: Designs and Applications.” Ph.D. thesis, Virginia
Polytechnic Institute and State University, 2009.
18 P. Massioni, “Decomposition Methods for Distributed Control and Identification.” Ph.D. thesis, Delft University of
Technology, 2010.