Embed Size (px)
Citation preview

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
1
Abstract—Multiple solutions are often needed because of
different kinds of uncertain failures in a plan execution process
and scenarios for which precise mathematical models and
constraints are difficult to obtain. This work proposes an
optimization strategy for multi-robot task allocation (MRTA)
problems and makes efforts on offering multiple solutions with
same or similar quality for switching and selection. Since the
mentioned problem can be regarded as a multimodal optimization
one, this work presents a niching immune-based optimization
algorithm based on Softmax regression (sNIOA) to handle it. A
pre-judgment of population is done before entering an evaluation
process to reduce the evaluation time and to avoid unnecessary
computation. Furthermore, a guiding mutation operator inspired
by the base pair in theory of gene mutation is introduced into
sNIOA to strengthen its search ability. When a certain gene
mutates, the others in the same gene group are more likely to
mutate with a higher probability. Experimental results show the
improvement of sNIOA on the aspect of accelerating computation
speed with comparison to other heuristic algorithms. They also
show the effectiveness of the proposed guiding mutation operator
by comparing sNIOA with and without it. Two MRTA application
cases are tested finally.
Index Terms—Multi-robot task allocation, multimodal
optimization, niching immune-based optimization algorithm,
Softmax regression, guiding mutation operator.
I. INTRODUCTION
ULTI-robot cooperative systems attract much attention
due to their distributed parallel processing abilities in
recent decades. They are considered to be promising and
of wide applications, such as path planning [1], exploration [2],
tracking [3], foraging [4], and transportation [5], and have been
This work was supported in part by the National Key Research and
Development Plan from Ministry of Science and Technology
(2016YFB0302700), National Natural Science Foundation of China (nos.
61473077, 61473078, 61503075, 61603090), International Collaborative
Project of the Shanghai Committee of Science and Technology (no.
16510711100), Shanghai Science and Technology Promotion Project form
Shanghai Municipal Agriculture Commission (no. 2016-1-5-12), the Fundamental Research Funds for the Central Universities (no. 2232015D3-32),
Cooperative research funds of the National Natural Science Funds Overseas
and Hong Kong and Macao scholars (no. 61428302), and Program for Changjiang Scholars from the Ministry of Education (2015-2019).
Li Huang, Yongsheng Ding, Yaochu Jin and Kuangrong Hao are with the
Engineering Research Center of Digitized Textile and Apparel Technology, Ministry of Education, together with the College of Information Science and
Technology, Donghua University, Shanghai 201620, China. Yaochu Jin is also
with the Department of Computer Science, University of Surrey, Guildford, Surrey GU27XH, United Kingdom. (e-mail: [email protected],
[email protected], [email protected], [email protected]). Mengchu
Zhou is with the Department of Electrical and Computer Engineering, New Jersey Institute of Technology, Newark, NJ 07032, USA (e-mail:
applied to many domains like social science [6] and industrial
engineering [7]. With the increasing demand for multi-robot
cooperation in complex applications, the significance of
multi-robot task allocation (MRTA), which is to determine an
efficient and intelligent task assignment to improve the system
performance [8], is recognized by more and more researchers
[9-13].
A single optimal allocation plan may be insufficient. First,
uncertain emergencies occur occasionally during actual
execution processes of multi-robot cooperative systems, such
that the predefined optimal task allocation schemes cannot be
realized as expected. In the light of tackling different types of
failures, outstanding work has been done to handle them. For
the contention of resources, the interference is modeled when
multiple robots use the same resource [14]. For dynamic
settings of uncertain costs, a probabilistic cost representation is
introduced to incorporate uncertainty and interdependency via
distributional models [15]. For the varying coupling
relationships, an ontology-based behavior modeling and
checking system is proposed [16]. However, these methods can
only cope with specific types of events. There is a lack of
methods able to handle all kinds of unexpected failures. Hence
a group of optimal assignments are highly desired, such that the
predetermined scheme can be switched to another one when it
cannot continue anymore. Second, precise mathematical
models and constraints with comprehensive considerations are
difficult to be summarized in some realistic application
environments. Nevertheless, decision-makers are surely
conscious of the feasibility of given solutions. Multiple
solutions are needed as candidates. Finally, for a redundant
circumstance, more robots are available for limited tasks. A
group of assignment schemes can all satisfy the task
requirement. Based on the above analysis, we conclude the
necessity to provide multiple solutions for an MRTA problem.
Multiple optimal solutions are common in industrial
manufacturing processes as well and have highly valued
practical applications. First, apart from uncertain failures of a
system, physical or energy constraints have impact on the
long-term execution of a unique optimum as well. Next,
multiple solutions with same or similar quality are important to
foster the robustness and flexibility of a system and are useful
for the sensitivity analysis of a problem. Lastly, multiple
optimal solutions, as calculated by a centralized controller, can
act as the prior information of a distributed multi-robot system
to guide cooperative work and decrease the chances of resource
conflict and system deadlock.
In general, this kind of problems belongs to the field of
multimodal optimization. Classical heuristic algorithms,
because of their rapid convergence to an optimum, likely a local
one, cannot be applied to multimodal optimization problems
Multiple-solution Optimization Strategy for
Multi-robot Task Allocation
Li Huang, Yongsheng Ding, Senior Member, IEEE, MengChu Zhou, Fellow, IEEE,
Yaochu Jin, Fellow, IEEE, and Kuangrong Hao
M

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
2
directly. Yet as a base, they may properly be combined with
other techniques to deal with such problems well.
Commonly used algorithms include Genetic Algorithm (GA)
[17], Particle Swarm Optimization (PSO) [18], Ant Colony
Optimization (ACO) [19] and Differential Evolution (DE) [20].
The Big Bang-Big Crunch (BB-BC) algorithm is improved for
multimodal optimization because of its low computational cost
[21]. The Estimation of Distribution Algorithms (EDAs) are
improved to deal with multimodal one by considering their
advantages in preserving high diversity [22].
Niching methods are widely taken as ideal techniques to
maintain a balance between the exploration and exploitation of
multiple solutions [23]. Related researches are done from the
perspective of overcoming shortcomings and enhancing
performances of basic methods. A classical niching method
requires setting a niche distance threshold [24]. For this
problem, a Twin-space Crowding (TC) is introduced to build a
parameter-free paradigm to eliminate the effect caused by a
parameter value [25]. A distance-based Locally Informed
Particle Swarm (LIPS) optimizer is proposed in [18] to
eliminate the need for specifying any niching parameter and
enhance the fine search ability of PSO. A PSO algorithm using
a ring neighborhood topology, which does not require any
niching parameters, is described in [26]. In order to avoid the
time complexity caused by pairwise distance calculations, the
work [27] proposes a fast niching technique by introducing the
locality sensitive hashing, which is an efficient algorithm for
approximately retrieving nearest neighbors. An improved
information-sharing mechanism among individuals is
introduced in [28] to induce more stable and efficient niching
behavior, and a newly proposed parent-centric mutation
operator is combined with a synchronous crowding
replacement rule in [29]. Besides niching methods, new paths
to gain the multimodal optimization ability are established. For
example, in Gaussian Classifier-based Evolutionary Strategy
(GCES) [30], multimodal optimization problems are regarded
as classification ones, and the locations and basins of optima
are saved by using Gaussian mixture models. In the
cluster-based differential evolution [31], the clustering partition
is used to divide the whole population into subpopulations for
locating different optima.
An Artificial Immune System (AIS) is a parallel distributed
self-adaptive system including features of evolutionary
learning, pattern recognition and associative memory. Clonal
Selection Algorithm (CSA), which evolves multiple
populations simultaneously, is suitable for solving multimodal
optimization problems. A hyper-mutation operator appears in
CSA often. However, it is semi-blind and inefficient to handle
complex circumstances. To overcome such drawback, the work
[32] embeds Baldwinian learning and orthogonal learning in
CSA. Thus, the hybrid learning CSA can perform effectively
and robustly as expected. An immune-inspired affinity model is
studied for the container multimodal transport emergency relief
to schedule a multimodal transportation flow of the chain
efficiently and reliably [33]. A biological notion in vaccines is
introduced into AIS to lead antibodies to unexplored areas.
Consequently, the exploration can be promoted in a search
space for solving multimodal function optimization problems
[34]. A fusion of the immune network and predication performs
well in regulating local and global search and guiding the
determinate direction of local search, thus improving search
ability for dealing with multimodal problems [35].
Most of the research achievements inspired by AIS for
multimodal optimization are able to improve search ability,
convergence speed and solution quality. In spite of some work
like [33] caring about time efficiency as well, the existing
methods are based on the idea of accelerating search processes.
Considering characteristics of AIS and niching techniques, the
computational complexity remains at a much-the-same level. In
regard to the causes of the computational complexity, one of
them is an expensive fitness evaluation process in complex
environments and realistic applications, for example, our
concerned MRTA problem.
In this work, considering that the fitness evaluation process
is one of reasons causing much time consumption, Softmax
regression [36] embedded in a Niching Immune Optimization
Algorithm (sNIOA) is proposed to filter newly produced
antibodies via pre-judgment based on historical information
and reduce the number of individuals who enter an evaluation
process. The computational procedure can be accelerated
through the way of decreasing the time otherwise required for
fitness evaluation. Furthermore, a Guiding Mutation (GM)
operator is proposed to enhance the effective generation of new
antibodies in order to improve the search ability of sNIOA,
thereby resulting in its extension called sNIOA-GM. In
comparison with sNIOA, the proposed sNIOA-GM is able to
search in a larger space while requiring less computational
resource. In simulation experiments, values of parameters are
analyzed for better performance; comparisons with other
multimodal optimization algorithms on benchmarks are
conducted; and two scenarios of MRTA problems containing
multiple solutions are tested.
The rest of this paper is constructed as follows: Section II
presents the proposed sNIOA. Section III introduces the GM
operator and sNIOA-GM. Section IV analyzes the multimodal
optimization ability of sNIOA and influences of its parameters
on its performance and compares it with other heuristic
algorithms. It also presents the performance of the GM operator
and shows task assignment results for MRTA problems. The
conclusion and future work are given in Section V.
II. NICHING IMMUNE-BASED OPTIMIZATION ALGORITHM
BASED ON SOFTMAX REGRESSION
The flowchart of the proposed sNIOA is shown in Fig. 1.
First, initial antibodies are generated according to an antigen
recognized, which represent initial solutions for a problem.
Their fitness values are calculated through an evaluation
process to determine affinity to the antigen. Then, these
antibodies and their fitness compose the training set of Softmax
regression. A pre-judgment model is built by it. New
population, produced by operators of selection, mutation and
crossing, is prejudged by this regression model such that
non-ideal (low-quality) antibodies can be eliminated before
entering an evaluation process. In this way, the time of fitness
evaluation can be reduced. The niche technology based on a
niching distance is used to maintain distribution and
multimodal performance of solutions.

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
3
Initialize antibody
and training set
Whether meeting the
terminal conditions?
Produce
memory cell
Build pre-
judgment model
Y
N
Recognize
antigen
Output
Evaluate
antibody
Niche
techonology
Update
sample library
Generate parent
population
Produce new antibodies
(Selection, mutation
and cross)
Antibody pre-
judgment
Generate new
population
Fig. 1. The flowchart of sNIOA.
A. Immune-based Optimization Algorithm
AIS is described as the one that incorporates many properties
of natural immune systems, including diversity, distributed
computation, error tolerance, dynamic learning and adaptation,
and self-monitoring [37]. Therefore, it offers effective and
efficient inspiration for complex optimization problems. Based
on the mentioned properties, a series of intelligent algorithms
have been proposed. Their typical representative is an
immune-based optimization algorithm (IOA).
IOA is a combination of algorithms based on an immune
self-regulation mechanism and immune response [38]. It shares
similarities with other immune algorithms and possesses
unique and distinctive characteristics of keeping population
diversity and converging to the optimum rapidly. Attributing to
them, IOA is a preferable approach for multimodal
optimization. Its implementation procedure is shown in Section
A of the Supplementary File.
First, aiming at a recognized antigen, which corresponds to
an objective function in an optimization problem, initial
antibodies are generated randomly.
Then, individuals enter an evolution procedure based on
affinity values with the antigen and keep diversity by
considering concentration values among antibodies. This is an
application of the immune system antibody concentration
regulation principle, i.e., the antibody with worse values of
fitness as well as concentration is suppressed during the process.
Thus, the population diversity can be preserved along with the
reservation of matched antibodies. More specifically, the
evaluation phase is based on three indexes of individuals. The
first one is fitness, which corresponds to the value of an
objective function in optimization. The second one is
concentration, which indicates population diversity. The third
one is excellence, which is calculated based on their fitness and
concentration:
1 1
1i i
i e e
i i
f c
e p pn n
f c
i i
I II I I
I I
, (1)
where if
I , icI and
ieI denote values of fitness, concentration
and excellence of individual i , respectively; and epI is the
multiplicity evaluation parameter to balance fitness and
concentration as a weight.
Next, excellent antibodies constitute the parent population
and the best part of these is kept in the memory cell. The
memory unit helps the corresponding antibodies for an antigen,
which has come up, to be generated faster than before.
After that, new population is generated through three phases.
The first one is selection that is based on the roulette selection.
The individual with a greater value of excellence is chosen with
a higher probability. The second one is mutation used to
produce new individuals. It can search more space. The third
one is crossing that contributes to reserving gene segments of
good individuals and passing them on to future generations.
Two terminal conditions are used in this work. One is the
limited number of iterations. The other is that the average
fitness value of individuals reaches a predetermined threshold.
B. Niche Technology
The niche technology is an abstraction from a biological
phenomenon. In an ecological environment, fierce
competitions among intraspecific creatures may occur
sometimes for limited resources. However, such a relationship
does not appear among different species. In this way, in the
process of population evolution, the fittest one can be preserved
in a certain kind of creatures. At the same time, the species
diversity can be maintained. The introduction of a niche
technology to IOA is able to equip IOA with multimodal
optimization ability while maintaining diversity of solutions.
There are a variety of ways to implement niche techniques.
This work uses the one based on niche distance. First, a niche
distance threshold is defined. Then, the distance between each
pair of individuals is calculated. If the calculated distance is less
than the threshold, the individual that has worse fitness is
inflicted with a penalty. Thus it may be eliminated with a larger
probability later on. In other words, there is only one
satisfactory solution within the range of some niche distance.
The pseudo-code of this niche technology based on niche
distance for a maximization problem is shown in Section B of
the Supplementary File.
The niche distance is an important parameter of the niche
technology and has great impact on multimodal optimization
performance. A large niche distance may lead to
non-convergence of an algorithm. On the contrary, a tiny one
can result in non-uniformity of solutions, especially for the
function with continuous solution intervals, even missing the
optima.

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
4
C. Softmax Regression
At the beginning of sNIOA, antibodies are initialized and
their fitness values are computed. These values are contiguous.
Hence, a fitness threshold should be given in order to replace
fitness values by class labels. The fitness threshold t is
called classification threshold and defined as:
ˆ ˆˆ ˆ , maximization
, minimization
f f f for
f f f for
, (2)
where f is the fitness value of an antibody and is the
parameter of a classification threshold. For maximization
problems, an antibody whose fitness is more than , is
expected to be preserved. For minimization problems, an
individual whose fitness is less than , is a better choice. In
our concerned MRTA problems, the individuals with better
fitness values are regarded as ideal ones. Others are called
non-ideal antibodies. After being labeled, the initialized
individuals and corresponding labels are input to a Softmax
training process as a sample database and then a prediction
model is obtained.
During iterations, when new antibodies are produced after
selection, mutation and crossing operations, their qualities are
determined via the mentioned prediction model. The non-ideal
(low-quality) individuals are eliminated directly. The ones with
predicted high qualities enter an evaluation process to obtain
their precise fitness values.
The newly computed antibodies and their labels are
embedded into the sample library of Softmax regression. The
classification threshold is recomputed, and the individuals are
relabeled with the new threshold to raise the standard of better
individuals gradually. The description of Softmax regression is
given in Section C in the Supplementary File.
III. GUIDING MUTATION OPERATOR FOR SNIOA
In this section, the GM operator is proposed to strengthen the
optimization ability of sNIOA, which is inspired by the theory
of gene mutation [39], thus yielding sNIOA-GM. In accordance
with the mutational pattern of a base, gene mutations can be
divided into frameshift mutations and base substitutions. The
former is caused by the insertion or deletion of a number of
nucleotides. For example, a segment of genes “A T C T”
changes to “A T A C T” by the insertion of “A” or “A T T” by
the deletion of “C”. The latter therein refers to a kind of
mutations that one base pair is replaced by another different
base pair. The GM operator is inspired by base substitutions.
Many of base substitutions originally derive from the
mutation of a single base. When a single base is changed,
another base in this base pair is also replaced by others in the
next gene replication. For example under the influence of
nitrites, a cytosine (C) mutates into a uracil (U) stimulated by
the oxidative deamination. During the gene replication, the
uracil (U) does not pair up with a guanine (G) but with an
adenine (A). As a result, the C-G base pair mutates into a T-A
base pair as shown in Fig. 2.
C
G
U
G
U
A
C
G
U
A
T
A
Fig. 2. Example of base substitution under the influence of nitrites.
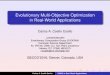
With the inspiration mentioned above, dividing one antibody
into several “gene pairs” is taken into consideration. A
traditional gene pair consists of two bases. Herein, the number
of genes in a “gene pair” may be more than two. In other words,
the wording of “gene group” should be more exact. When a
certain gene mutates, the other genes in a same group have a
higher probability of mutation.
The definition of a gene group also makes sense to our
MRTA problem. For example, a proper group among many
available robots has been chosen but with the inferior
connections with tasks as shown in Fig. 3(a), where triangles
stand for tasks and circles represent robots. In this case, it is less
helpful if there is only one assignment line being changed as
shown in Fig. 3(b). When these tasks are regarded as a gene
group, others have a higher probability of mutation when one of
them is altered. Thus the combination has more chances to be
modified comprehensively as shown in Fig. 3(c).
(a) (b) (c)
Fig. 3. Illustration of the gene group in a MRTA problem.
In the above-mentioned scenario, the formation of a gene
group mainly depends on the locations of tasks. In other words,
tasks which are relatively close to each other tend to be in a
same gene group. So, the Mean-shift algorithm is used to do
this herein. Some examples are shown in Section D of the
Supplementary File. Different kinds of symbol shapes
represent different gene groups. The results of clusters can
adapt to different application demands by tuning the threshold
in the Mean-shift algorithm.
After the creation of gene groups, individuals are determined
to be whether mutated or not depending on mutation probability
mp . In the process of mutation, when one gene of an individual
is chosen to be changed, each of the rest of genes in the same
group continues to be decided with a higher mutation
probability hmp . The GM operator is summarized as shown in
Algorithm I.
Based on above discussions, the procedures of sNIOA-GM
for MRTA problems are proposed as shown in Algorithm II.
Given population size N , sample library size S and gene
group size G , the GM operator costs O N G O N ,
where G ≪ N . The niche technology takes 2O N . The
training and predicting processes of Softmax regression spend

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
5
O S and O N , respectively. In summary, the proposed
sNIOA-GM’s complexity is 2O N O S .
Furthermore, the entire algorithm’s complexity depends on
the objective function being optimized as well. If it is a simple
function, it takes O N to evaluate the population. However,
when it comes to a complex context, especially appearing in
real applications, the evaluation process is complicated. When
its complexity exceeds O S , the proposed algorithm can
exhibit its great advantage than those without using Softmax
regression.
ALGORITHM I. GUIDING MUTATION OPERATOR
1: Base groups creation;
2: For each individual in population, generate a random number r ;
3: If mr p
4: Choose one base randomly and activate corresponding base group;
5: Base mutation;
6: For each of the rest of the base group, generate a random number r ;
7: If hmr p
8: Base mutation;
9: End if 10: End for
11: End if
12: End for
ALGORITHM II. SNIOA-GM
Step 1: Generate initial solutions according to the problem statement. Calculate
fitness values as the initial training set. Step 2: Use the niche technique to obtain multimodal optimization
performance.
Step 3: Evaluate the excellence ie of each ideal individual by the combination
of fitness if and concentration ic through a multiplicity evaluation
parameter ep . Stop if the termination criterions are met.
Step 4: Update the training set and create the prediction model. Step 5: Preserve good solutions in the memory cell.
Step 6: Generate new population through the way of selection, GM operator
and crossing. Step 7: Use Softmax regression to eliminate non-ideal solutions. Others are
preserved and combined with the memory cell as the parent
generation. Step 8: Increase the iteration count by one and go to Step 2.
IV. EXPERIMENTAL RESULTS AND ANALYSIS
In this section, the multimodal optimization ability of the
proposed sNIOA is shown by comparing with other popular
heuristic algorithms. This work provides the simulation results
of sNIOA-GM for two MRTA application cases.
A. Multimodal Optimization Ability of sNIOA
In this phase, the multimodal optimization ability of sNIOA
is tested to ensure the existence of alternative solutions.
Schaffer’s F6 function is a typical multimodal function
described by
2 2 2
22 2
sin 0.5, 0.5
1 0.001
x yf x y
x y
. (3)
In order to make the solution space including multiple
equivalent optimal areas, 2 20.001 x y is set to 0. That is to
say, the oscillations of function do not attenuate and each of the
peaks is a continuous interval. With the purpose of a clear
observation, this optimization problem is considered to search
for its maxima. The range of x and y is [-4, 4].
A group of random initial solutions are shown in Fig. 4(a).
The optimization results of IOA and sNIOA are shown in Fig.
4(b) and Fig. 4(c), respectively.
(a) Solution space of test function and initial solutions
(b) Optimal solutions of IOA
(c) Optimal solutions of sNIOA
Fig. 4. Illustration of multimodal optimization ability.
According to Fig. 4, both IOA and sNIOA can find the
optimization solutions of the revised Schaffer’s F6 function.
The result obtained by IOA, however, converges to one optimal
solution. To the contrast, obtained solutions of sNIOA can
distribute over the entire optimal solution intervals uniformly.
The theoretical reason is that, when an excellent antibody is
once generated, other antibodies are influenced by this
excellent one through the crossing operation during iterations.
Thus, they all converge to the excellent one in the end of IOA.
In sNIOA, a niche distance is defined. Because of this, there is a
fixed distance between each pair of candidate solutions, such
that solutions cannot gather to one point only. The training and
predicting processes, which are introduced to reduce the
evaluation time in sNIOA, do not have an effect on this
performance. To sum up, the uniform multimodal optimization
ability of sNIOA can be guaranteed.
B. Analysis of Parameters in sNIOA
The niche distance is a significant parameter of sNIOA. If it
is too small, it is difficult for sNIOA to find all optimal
solutions and leads to a premature convergence. On the other
hand, large niche distance is unfavorable for functions that have
steep peaks. In addition, the uniformity of optimal solutions in
the same continuous interval is also related to the distance
parameter.
The classification threshold as a parameter also impacts

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
6
optimization results. A loose threshold lets more ordinary
antibodies enter the evaluation process such that the advantage
of a fast computational speed cannot be shown dramatically. In
contrast, a tight threshold may impose restrictions on
population diversity.
These two parameters mentioned above have great influence
on optimization performances of sNIOA. In this part, the
impacts of niche distance and classification threshold are
discussed through tests on the Branin function. Their values
and resulting experimental results are shown in TABLE 1.
TABLE 1 PARAMETERS ANALYSIS EXPERIMENTAL RESULTS
Parameters Experimental Results
n
Deviation
of
Optimal Value
Deviation of Mean
Value
Standard
Deviation
Evaluation
Time
Actual Peak
Number
0.02
1/12 1.64E-03 0.0541 0.0309 22739.6 3
1/3 7.38E-03 0.1884 0.1192 14616.2 3
2/3 4.96E-03 0.2953 0.1744 9018 3
11/12 5.80E-03 0.0696 0.0397 10635.4 3
0.05
1/12 1.78E-03 0.1337 0.0963 22432.4 3
1/3 5.30E-03 0.2493 0.1530 16547.2 3
2/3 7.20E-03 0.3719 0.2196 10296.2 3
11/12 6.08E-03 0.2028 0.1179 10308 3
0.1
1/12 1.98E-03 0.2493 0.1739 22287.4 3
1/3 5.20E-03 0.4675 0.4395 15172.2 3
2/3 1.48E-03 0.5104 0.3103 10473.2 3
11/12 1.25E-03 0.3817 0.2861 11317.4 3
0.2
1/12 3.78E-03 0.8018 0.5330 22890 3
1/3 4.50E-03 0.9707 0.6108 15034.6 3
2/3 5.10E-03 1.1528 0.6932 11694.4 3
11/12 7.48E-03 1.0844 0.7796 9778 3
According to TABLE 1, all the experimental combinations
can find all optimal peaks. The deviations of optimal value
approach to 0 almost, i.e. sNIOA can find all optimal solutions
of this test function and achieve the optimization goal.
Furthermore, we use the prior computation time of NIOA as a
reference, which is 24080 evaluation times. From TABLE 1,
the times of fitness evaluation of all experimental combinations
are less than 24080. It proves that sNIOA can reduce the
evaluation time and show a satisfied computational
performance.
Next, the effect of classification threshold is analyzed.
According to above discussions, this parameter mainly has
impact on the time of computation. This conclusion is verified
by Section E in the Supplementary File, that the evaluation time
decreases with the raise of classification threshold parameter.
The reason for this is that, in the process of Softmax training for
minimizing problems, an individual is regarded as a preferable
antibody when its fitness is less than . When increases in
the experiments, goes down, i.e. only antibodies whose
fitness is much smaller than others can be preserved at the end
of Softmax prediction. In consequence, fewer individuals go to
the evaluation process, such that the evaluation time can be cut
down drastically, e.g., 62.55%. The bigger value of this
parameter, however, may not be better. When this value
increases to more than 2/3, the evaluation time has a slight drop
or remains unchanged till the end and even increases in some
cases.
The niche distance mainly has effect on the deviation of
mean value and standard deviation of optimal solutions. Along
with the niche distance’s growth, both deviations are on the rise
as shown in Section F of the Supplementary File. The
explanation of this trend is that, when the niche distance
increases, optimal solutions are more scattered around the
peaks. Therefore, a bigger deviation is caused. Nevertheless, a
smaller niche distance may lead to non-uniformity of solutions,
especially for the problem which has continuous solution
intervals, even missing optima sometimes.
To sum up, for different problems, the specific combination
of parameters should be designed accordingly.
C. Comparison with other heuristic algorithms
In order to prove its efficiency, we compare sNIOA with
other popular heuristic algorithms on test functions next.
These algorithms are all proposed for solving multimodal
optimization problems including NIOA, Niching Genetic
Algorithm (NGA) and Niching Particle Swarm Optimization
(NPSO). They are selected because of their validated
performance [40-42] and use of the niching technique. The
parameters in each algorithm are shown in TABLE 2, where
N is population size; L is the length of binary coding; I is
the number of iterations; M is the capacity of memory; cp
and mp are probabilities of crossing and mutation, respectively;
s is the parameter that balances fitness and concentration of an
antibody; and are parameters of classification threshold
for maximization and minimization problems, respectively; n
is the niche distance; max and min are the ranges of the
inertia weight; and 1c is the learning factor.
TABLE 2
PARAMETERS IN COMPARISON EXPERIMENTS OF EACH ALGORITHM
sNIOA NIOA NGA NPSO
N 100 N 100 N 100 N 100
L 22 L 22 L 22 L 22
I 200 I 200 I 200 I 200
M 20 M 20 cp 0.9 max 1
cp 0.9 cp 0.9 mp 0.05 min 0
mp 0.3 mp 0.3 - - 1c 2
s 0.15-0.95 s 0.15-0.95 - - - -
2
3 n 0.01-0.1 - - - -
1
3 - - - - - -
n 0.01-0.1 - - - - - -
All parameters are selected carefully to ensure that each
algorithm performs well. For example, the mutation probability
mp appears both in sNIOA, NIOA and NGA. However, the
one used for NGA is 0.05 and is much less than 0.3 used in
sNIOA and NIOA. We try several values of the mutation
probability and choose the one that leads to the best
performance of each algorithm by testing them on the revised
Schaffer’s F6 function. The explanation can be offered from the
theoretical perspective. In NGA, since the final goal is to bring
the population to convergence, selection and crossing happen
very often. Mutation, attempting to occasionally break a
number of individuals out of local optima as a way to maintain

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
7
diversity, should occur less frequently. In sNIOA and NIOA,
there is a memory cell preserving well-behaved individuals in
each generation inspired by AIS. Thus the excellent solutions
are not eliminated in the following iterations when increasing
the probability of searching more areas. As a result, a large mp
is preferred.
Test functions are shown in TABLE 3. Within specified
limits, the revised Schaffer’s F6 function includes multiple
continuous global optimization intervals. Himmelblau function
and Branin function have multiple global optimal peaks
without local optima. Rosenbrock function is actually a
unimodal function with a continuous gradual interval beside the
peak. There are two optimal solutions and four local optima in
Six-Hump Camel Back function. Cross-in-Tray function and
Rastrigin function include four and one global optimal peak,
respectively, both with many local optima. Shubert function
includes two global optimal peaks, a small number of local
optima and many slight fluctuation peaks. Note that when the
minima of a function are negative, we move this function to
upward. Thus, the lower boundaries are 0 for all test functions.
These functions cover various kinds of characteristics of
multimodal functions, such as continuous intervals and steep
peaks, global optima with and without local optima and
maximization and minimization problems. They are also
chosen as commonly-used benchmarks by many researchers
[42-44]. Therefore, we use them as our benchmarks.
The experimental results keep a record of the deviation from
the optimal value, deviation from mean value, standard
deviation, evaluation time and number of peaks found as shown
in TABLE 4. Here the deviation from the optimal (mean) value
is the difference between the optimal (mean) values obtained
from optimization algorithms and theoretical optima. The
standard deviation is used to measure stability of solutions. The
evaluation time indicates the time performance. The number of
peaks found is applied to evaluate the multimodal optimization
ability. In addition to the number of iterations, the termination
condition of each algorithm also takes the deviation from the
mean value into consideration. In this way, meaningless
calculation does not proceed when the optimal value cannot be
improved any more during iterations. All of the data are mean
values of ten times repeated trials.
From this table, the excellent time performance of sNIOA
can be seen in comparison with other heuristic algorithms. The
proportion of evaluation time reduces on average by 41.01%,
38.38% and 39.34% compared with NIOA, NGA and NPSO,
respectively. Its maximum time reduction can reach 53.78%,
68.74% and 69.63% in comparison with its three peers. Its other
performance measures fall in normal ranges of optimization
results. Some of its performances are the best. It is easy to
conclude that sNIOA can speed up the computation
dramatically while showing comparable optimization
performance in comparison with its three peers.
From the point of view of multimodal optimization ability,
sNIOA is able to find all optimal peaks. Antibodies do not
converge to local optima in most of the functions due to the
repulsion of the niche distance, except Rastrgin function with a
large number of local extremums. However, the limitation of
sNIOA cannot be denied, i.e., the non-uniformity of individuals
is evident when peaks are steep. The experimental results show
that NGA has strong convergence ability. Because of this,
NGA’s ability to search unknown optimal peaks is reduced as
shown in Himmelblau and Branin functions in TABLE 4. The
search ability of NPSO is uncertain and unstable. It sometimes
results in convergence to local optima as shown in Branin,
Six-Hump Camel Back and Shubert functions.
From the perspective of three deviation values, sNIOA
performs noticeably well in the experiments of revised
Schaffer’s F6, Branin and Shubert functions. Other results are
of the same order of magnitude and approach to the optimal
values.
TABLE 3
TEST FUNCTIONS AND PARAMETERS
Test Function Equation Range Max Min
Revised Schaffer’s F6
2 2 2, sinf x y x y -4 , 4x y 1 0
Himmelblau 2 2
2 2, 11 7f x y x y x y -6 , 6x y 2200 0
Branin
22
2
5.1 5 5 5 1, 10 6 10 1 cos 5 10
4 8
x xf x y y x
-10 , 10x y 250 0
Rosenbrock 2 22, 100 1f x y y x x -2 , 3x y 2200 0
Six-Hump
Camel Back
42 2 2 2, 4 2.1 4 4
3
xf x y x x xy y y
-3 , 3x y 5 0
Cross-in-Tray
2 20.1
100
, 0.0001 sin sin 1
x y
f x y x ye
-4 , 4x y 1 0
Shubert
, 1 cos 2 1 2cos 3 2 3cos 4 3 4cos 5 4 5cos 6 5
1 cos 2 1 2cos 3 2 3cos 4 3 4cos 5 4 5cos 6 5
f x y x x x x x
y y y y y
-2 , 2x y 350 0
Rastrgin 2 2, 20 10cos 2 10cos 2f x y x x y y -5 , 5x y 80 0

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
8
TABLE 4
EXPERIMENTAL RESULTS ON TEST FUNCTIONS OF DIFFERENT HEURISTIC OPTIMIZATION ALGORITHMS
Test Function Optimal
Value
Optimization
Algorithm
Deviation of
Optimal Value
Deviation of
Mean Value
Standard
Deviation
Evaluation
Time
Actual (Ideal)
Peak Number
Schaffer’s F6 1
(max)
sNIOA 1.69E-08 9.59E-05 1.08E-04 6195 5(5)
NIOA 1.76E-08 9.51E-05 1.19E-04 7163 5(5)
NGA 1.90E-13 4.81E-04 1.76E-03 19820 5(5)
NPSO 0 1.27E-02 7.76E-02 20400 5(5)
Himmelblau 0
(min)
sNIOA 1.70E-03 1.3200 0.9378 11553.9 4(4)
NIOA 4.54E-04 0.9820 0.6493 24080 4(4)
NGA 3.20E-04 1.0500 0.7300 20100 3.5(4)
NPSO 3.07E-03 4.0534 3.9987 20400 4(4)
Branin 0.397887
(min)
sNIOA 3.27E-03 0.2525 0.1581 14346.1 3(3)
NIOA 1.77E-04 0.3044 0.2049 24080 3(3)
NGA 5.44E-05 0.2553 0.1686 20100 2.8(3)
NPSO 2.58E-03 1.3908 0.9989 20400 4(3)
Rosenbrock 0
(min)
sNIOA 7.72E-03 0.2574 0.1508 14036.2 1(1)
NIOA 6.14E-02 0.3093 0.0894 24080 1(1)
NGA 1.06E-02 0.2066 0.1431 20100 1(1)
NPSO 5.50E-04 0.4576 0.4708 20400 1(1)
Six-Hump
Camel Back
-1.0316
(min)
sNIOA 1.21E-03 0.0953 0.0655 12280.5 2(2)
NIOA 8.61E-05 0.0739 0.0509 24080 2(2)
NGA 1.97E-05 0.0275 0.0185 20100 2(2)
NPSO 5.69E-04 0.4158 0.3252 20400 3.8(2)
Cross-in-Tray -2.0626
(min)
sNIOA 4.29E-05 2.93E-03 2.03E-03 11130.1 4(4)
NIOA 1.19E-06 2.05E-03 1.33E-03 24080 4(4)
NGA 1.86E-06 1.08E-03 8.33E-04 20100 4(4)
NPSO 1.71E-05 1.23E-02 1.54E-02 20400 4(4)
Shubert -186.73
(min)
sNIOA 6.81E-02 7.8764 5.0709 14071.5 2(2)
NIOA 1.18E-03 8.4319 5.2265 24080 2(2)
NGA 3.32E-04 12.6556 8.5062 20100 2(2)
NPSO 1.65E-01 106.8010 52.1314 20400 15.5(2)
Rastrgin 0
(min)
sNIOA 7.53E-02 3.2800 1.2984 15389.1 14.6(1)
NIOA 1.94E-03 2.9933 1.2430 24080 13.5(1)
NGA 5.53E-09 2.2137 0.8807 20100 9(1)
NPSO 4.52E-01 6.8802 3.8715 20400 27.4(1)
Next, we illustrate if there are significant differences
between sNIOA and other heuristic algorithms. The significant
difference p value at a two-tail t-test is given with the
significance level of 5%. The null hypothesis is that there are no
significant differences between sNIOA and other algorithms.
As the results of four indexes shown in TABLE 5 for the
revised Schaffer’s F6 function as an illustrative example, if the
p value is smaller than 0.05, the null hypothesis is rejected, i.e.
there is a significant difference between two algorithms on the
corresponding index. The four indexes are divided into two
parts. The first part describes the optimization ability, which
consists of the deviation of optimal value, the deviation of mean
value and the standard deviation.
TABLE 5
T-TEST RESULTS ON SCHAFFER’S F6 FUNCTION
Compared
Optimization
Algorithms
p value
Deviation
of Optimal Value
Deviation of
Mean Value
Standard
Deviation
Evaluation
Time
sNIOA vs NIOA 0.95554 0.66327 0.10946 0.040021
sNIOA vs NGA 0.15213 0.0043328 0.037891 3.4412e-19
sNIOA vs NPSO 0.15214 5.1572e-05 1.3226e-07 6.4315e-13
As shown in TABLE 5, some results obtained from sNIOA,
for example the deviations from the mean value of sNIOA and
NGA, show significant differences. However, accompanying
with results shown in TABLE 4, the corresponding index of
sNIOA is better than NGA’s. Therefore, a conclusion can be
obtained that sNIOA has at least the same optimization ability
as other heuristic algorithms do. The second part describes the
time performance represented by the evaluation time.
Regarding this index, sNIOA performs the best on computation
speed as shown in TABLE 4. By means of the hypothesis
testing, significant differences are verified between sNIOA and
other algorithms as shown in TABLE 5. To sum up,
considering all experimental results synthetically, sNIOA
achieves the original intention of this work with competitive
multimodal optimization performances, and clear advantage on
computation speed over its three peers.
Next, two application cases are provided to illustrate the
merits of sNIOA-GM in solving MRTA problems.
D. Application Case 1
Assume that there are q robots 1 2, , , qR r r r and s tasks
1 2, , , sT t t t . At a certain moment each task needs to be
executed by one robot and each robot can only perform one task.
ij is a binary variable and presents the allocation relationship
between robot ir and task jt . ijc is the execution cost of task
jt by robot ir . Denote the priority level of task jt as jp . A
smaller jp implies a higher priority of task jt . The MRTA
problem can be stated as follows.
1
mins
ij ij j
j
f c p
(4)
s.t. 1
1, 1,2, ,s
ij
j
i q
(5)

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
9
1 1
, 1,2, , ; 1,2, ,q s
ij
i j
s i q j s
(6)
s q (7)
0,1 ,ij i j (8)
In this scenario, ten groups of simulations are done with the
number of tasks increasing from 10 to 100 and the number of
robots increasing from 20 to 200. The tasks have different
priority levels from 1 to 5. Tasks and robots are dispersed over
a 100×100 square area randomly. All the experimental
combinations are repeated for 10 times. Then average values
are taken as the final results.
The performances of sNIOA-GM are discussed from two
perspectives: run time and obtained cost, respectively. For the
former, due to the pre-judgment of Softmax regression, sNIOA
and sNIOA-GM both show better time performance than the
original IOA as shown in Fig. 5(a). Regarding the cost, the GM
operator can account for the elimination of second half
iterations of sNIOA-GM as shown in Fig. 5(b). When the
number of tasks is small, optimal solutions can be found under
the same conditions by all of these three methods. However
when it comes to large-scale task allocation problems, in the
case of same limited number of iterations which is 200, the GM
operator can make antibodies mutate toward a better direction
and help find the preferable solutions, while solutions given by
IOA and sNIOA cannot converge to optimal values.
In closing, sNIOA-GM can realize effective optimization in
the concerned MRTA scenarios by achieving rapid
computation speed and better solutions, especially for
large-scale problems.
(a) Run time
(b) Value of cost function
Fig. 5. Comparison between IOA, sNIOA and sNIOA-GM.
E. Application Case 2
Assume that there are w robot stations. For each station, g
heterogeneous robots are expected to be available. The total
number of robots is q wg . All of the robots are labeled with
number 1 to q . There are s tasks scattered on an area waiting
for execution labeled with number 1 to s . Each task needs to be
executed by one robot. One robot can perform multiple tasks in
turn. The goal is to assign robots to perform tasks and design
the execution sequence of each robot for the sake of minimizing
total energy consumption, which is mainly related to the
travelling distances of robots. The concerned context can be
proved to be an NP-hard problem [45]. The mathematical
model is built as follows.
Let A denote the th robot station. Given a set T , T is
the number of members in T . A robot ir is one of the robots
departing from station A to accomplish a sequence of
assigned tasks 1 2, , , iT
i i i iT t t t to ir and return to the same
place after finishing its jobs. Its destination set
, ,i iD A T A is labeled with number 1 to iD . uv is
taken as the distance between destinations u and v . uv is
defined as the binary variable representing the relationship that
the path goes from u to v . Then the concerned MRTA
problems can be formulated as follows:
1 1 , 1
mini iD Dq
uv uv
i u v u v
f
(9)
s.t. 1
q
ii
T T
, (10)
0,1 , , vuv u , (11)
1i iA v uA . (12)
For solving the above-mentioned problem by an
immune-inspired method, an antibody is initialized as a vector
whose length is s as shown in Fig. 6. Each position of the
antibody represents the label of a robot being assigned to
accomplish the task. One robot can be allocated to multiple
tasks.
Task ID
Antibody 5 1 q� � 3
Robot ID
1 2 3 4 � s
Fig. 6. An antibody of sNIOA-GM for MRTA.
For this MRTA problem, the procedure to compute the total
cost is given as Algorithm III. The population size is N . In
order to obtain the sequence that a robot performs a set of tasks,
the Simulated Annealing Algorithm [46] is used to design a
shortest path and its number of iterations is L . Therefore, the
evaluation process needs O N q L , which is
approximately equal to 2O N . Comparing with O N ,
which a simple objective function takes, it is reasonable to
expect that the computational cost can be decreased when the
time of fitness evaluation is shortened in this problem.

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
10
ALGORITHM III. FITNESS COMPUTATION FOR APPLICATION CASE 2
1: Population size is N ;
2: For 1:i N
3: 0Total distance ;
4: Collect assigned tasks for each robot;
5: For 1:j q
6: Compute the shortest path with use of Simulated Annealing algorithm
(Number of iterations is L );
7: Total distance Total distance Shortest Path ;
8: End for
9: Return Total distance as the fitness value for thi antibody;
10: End for
There are three robot stations 1A , 2A and 3A in an
environment located on [0, 70], [50, 0] and [100, 30],
respectively. Three robots at each station are used to deal with
20 tasks scattered on a 100 100 area. 1
AC , 2
AC and 3
AC
denote the number of required robots from each station,
respectively. Multiple solutions and related data are given in
TABLE 6 and Section G of the Supplementary File. There are
different kinds of allocation ways with different numbers of
robots dispatched from different robot stations. According to
these results, decision makers can choose one from them
depending on their situations.
For example, in this application case, the number of robots is
three at each station. However, when a set of tasks arrives,
some robots may be charged or have been already dispatched to
execute other jobs. It results in the reduction of available robots.
In traditional approaches, managers collect data, build models
and compute solutions at that time. This process consumes
much time before starting execution and thus delays the
completion of tasks. Besides, it needs to be done every time as
long as tasks arrive. With the use of our method, a group of
strategies covering different cooperative ways between robot
stations and execution paths can be obtained previously
according to the original information that each station has three
robots. In such circumstances, decision makers can easily
choose one from them regardless of the number of real-time
available robots.
Furthermore, it is also helpful to avoid complex modeling of
robot energy. For example, considering TABLE 6 and Section
G of the Supplementary File, if a robot in station 2A has
insufficient power to finish a large-scale set of tasks, strategies
(c), (e) and (f) are more appropriate than (a) even though the
latter one has the shortest path length.
TABLE 6
EXPERIMENTAL RESULTS OF APPLICATION CASE 2
No. Path Length 1
AC 2
AC 3
AC
(a) 476.36 1 1 1
(b) 520.44 1 2 1
(c) 535.55 1 1 2
(d) 555.00 1 2 2
(e) 555.34 2 1 1
(f) 567.40 2 1 2
(g) 570.55 0 2 2
(h) 573.72 1 0 3
(i) 604.00 2 2 2
(j) 610.67 2 2 1
V. CONCLUSION
In this work, an optimization strategy to provide multiple
solutions with same or similar quality is proposed for MRTA
problems. First, in order to decrease time of fitness evaluation
and accelerate computation, sNIOA is designed. The new
population is prejudged by the regression model such that
non-ideal antibodies can be eliminated before entering their
evaluation process and unnecessary computations are thus
avoided. Then, the GM operator inspired by the base pair is
proposed. Genes of an antibody are divided into several gene
groups. When a gene mutates, others in the same gene group
may mutate with a higher probability. The GM operator is
helpful to find preferable solutions when the number of
iteration is limited and the scale of a MRTA problem is
large-sized. To verify the effectiveness and efficiency of the
proposed algorithms, this work conducts a series of
experiments on test functions and compares them with several
heuristic algorithms. The results demonstrate the high speed of
sNIOA and search ability of GM. Furthermore, application
cases show that the proposed sNIOA-GM can well handle
MRTA problems by providing multiple solutions.
Different from other task allocation methods, the major
advantages of sNIOA-GM are: 1) it can provide multiple
solutions with same or similar quality for decision makers to
select and switch plans whenever such needs arise; 2) because
of the pre-judgment by a regression model, sNIOA is able to
reduce the evaluation time and computational cost; 3) the GM
operator reveals a potential connection between genes and
strengthens the optimization ability of sNIOA.
The further studies may include a selection mechanism and
switching strategy given multiple candidate solutions. Besides,
considering the balance between multimodal optimization
ability and uniformity of solutions, the proposed sNIOA-GM
still has some room for further improvement. Furthermore,
preserved individuals should be judged more accurately to
obtain different mutation probabilities according to their fitness
values.
ACKNOWLEDGEMENT
We dedicate this paper to Prof. Yongsheng Ding, who
proposed the original idea, provided technical assistance and
had helpful discussions with us. We feel very sad for Prof.
Yongsheng Ding’s unexpected passing away and miss him so
much.
REFERENCES
[1] P. Rakshit et al., "Realization of an Adaptive Memetic Algorithm Using Differential Evolution and Q-Learning: A Case Study in Multirobot Path
Planning," in IEEE Transactions on Systems, Man, and Cybernetics:
Systems, vol. 43, no. 4, pp. 814-831, July 2013. [2] J. C. Elizondo Leal, J. G. Ramirez Torres, E. Rodriguez Tello and J. R.
Martinez Angulo, "Multi-robot Exploration Using Self-Biddings under
Constraints on Communication Range," in IEEE Latin America Transactions, vol. 14, no. 2, pp. 971-982, Feb. 2016.
[3] C. H. Chang, S. C. Wang and C. C. Wang, "Exploiting Moving Objects:
Multi-Robot Simultaneous Localization and Tracking," in IEEE Transactions on Automation Science and Engineering, vol. 13, no. 2, pp.
810-827, April 2016.
[4] D. H. Lee, S. A. Zaheer and J. H. Kim, "Ad Hoc Network-Based Task Allocation With Resource-Aware Cost Generation for Multirobot

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
11
Systems," in IEEE Transactions on Industrial Electronics, vol. 61, no. 12,
pp. 6871-6881, Dec. 2014.
[5] A. Garcia Barrientos, J. Lara Lopez, E. S. Espinoza, J. Hoyo and G.
Valencia Palomo, "Object Transportation Using a Cooperative Mobile
Multi-Robot System," in IEEE Latin America Transactions, vol. 14, no. 3,
pp. 1184-1191, March 2016. [6] M. Turduev, G. Cabrita, M. Kırtay, et al, " Experimental studies on
chemical concentration map building by a multi-robot system using
bio-inspired algorithms," in Autonomous Agents and Multi-Agent Systems, vol. 28, no. 1, pp. 72-100, 2014.
[7] H. Li, F. Karray, O. Basir and I. Song, "A Framework for Coordinated
Control of Multiagent Systems and Its Applications," in IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and
Humans, vol. 38, no. 3, pp. 534-548, May 2008.
[8] D. H. Lee, S. A. Zaheer and J. H. Kim, "A Resource-Oriented, Decentralized Auction Algorithm for Multirobot Task Allocation," in
IEEE Transactions on Automation Science and Engineering, vol. 12, no.
4, pp. 1469-1481, Oct. 2015. [9] D. Zhu, H. Huang and S. X. Yang, "Dynamic Task Assignment and Path
Planning of Multi-AUV System Based on an Improved Self-Organizing
Map and Velocity Synthesis Method in Three-Dimensional Underwater Workspace," in IEEE Transactions on Cybernetics, vol. 43, no. 2, pp.
504-514, April 2013.
[10] L. Liu L and D. A. Shell, "Large-scale multi-robot task allocation via dynamic partitioning and distribution," in Autonomous Robots, vol. 33,
no. 3, pp. 291-307, 2012.
[11] L. Luo, N. Chakraborty and K. Sycara, "Provably-Good Distributed Algorithm for Constrained Multi-Robot Task Assignment for Grouped
Tasks," in IEEE Transactions on Robotics, vol. 31, no. 1, pp. 19-30, Feb.
2015. [12] Y. Cai, Z. Tang, Y. Ding, and B. Qian, "Theory and Application of
Multi-robot Service-oriented Architecture," in IEEE/CAA Journal of
Automatica Sinica, 3(1), 15-25, 2016. [13] D. F. Wu, G. P. Zeng, L. G. Meng, W. J. Zhou, and L. M. Li, "Gini
coefficient-based task allocation for multi-robot systems with limited
energy resources," in IEEE/CAA Journal of Automatica Sinica, vol. 5, no. 1, pp. 155-168, Jan.2018.
[14] C. Nam and D. A. Shell, "Assignment Algorithms for Modeling Resource
Contention in Multirobot Task Allocation," in IEEE Transactions on Automation Science and Engineering, vol. 12, no. 3, pp. 889-900, July
2015. [15] C. Nam and D. A. Shell, "Analyzing the Sensitivity of the Optimal
Assignment in Probabilistic Multi-Robot Task Allocation," in IEEE
Robotics and Automation Letters, vol. 2, no. 1, pp. 193-200, Jan. 2017. [16] C. Wang, L. Cao and C. H. Chi, "Formalization and Verification of Group
Behavior Interactions," in IEEE Transactions on Systems, Man, and
Cybernetics: Systems, vol. 45, no. 8, pp. 1109-1124, Aug. 2015. [17] J. Yao, N. Kharma and P. Grogono, "Bi-Objective Multipopulation
Genetic Algorithm for Multimodal Function Optimization," in IEEE
Transactions on Evolutionary Computation, vol. 14, no. 1, pp. 80-102, Feb. 2010.
[18] B. Y. Qu, P. N. Suganthan and S. Das, "A Distance-Based Locally
Informed Particle Swarm Model for Multimodal Optimization," in IEEE Transactions on Evolutionary Computation, vol. 17, no. 3, pp. 387-402,
June 2013.
[19] Q. Yang et al., "Adaptive Multimodal Continuous Ant Colony Optimization," in IEEE Transactions on Evolutionary Computation, vol.
21, no. 2, pp. 191-205, April 2017.
[20] A. Basak, S. Das and K. C. Tan, "Multimodal Optimization Using a Biobjective Differential Evolution Algorithm Enhanced With Mean
Distance-Based Selection," in IEEE Transactions on Evolutionary
Computation, vol. 17, no. 5, pp. 666-685, Oct. 2013. [21] C. H. Yoo, D. K. Lim and H. K. Jung, "A Novel Multimodal Optimization
Algorithm for the Design of Electromagnetic Machines," in IEEE
Transactions on Magnetics, vol. 52, no. 3, pp. 1-4, March 2016. [22] Q. Yang, W. N. Chen, Y. Li, C. L. P. Chen, X. M. Xu and J. Zhang,
"Multimodal Estimation of Distribution Algorithms," in IEEE
Transactions on Cybernetics, vol. 47, no. 3, pp. 636-650, March 2017. [23] X. Li, M. G. Epitropakis, K. Deb and A. Engelbrecht, "Seeking Multiple
Solutions: An Updated Survey on Niching Methods and Their
Applications," in IEEE Transactions on Evolutionary Computation, vol. 21, no. 4, pp. 518-538, Aug. 2017.
[24] J. E. Vitela and O. Castanos, "A real-coded niching memetic algorithm
for continuous multimodal function optimization," 2008 IEEE Congress
on Evolutionary Computation (IEEE World Congress on Computational
Intelligence), Hong Kong, pp. 2170-2177, 2008.
[25] C. H. Chen, T. K. Liu and J. H. Chou, "A Novel Crowding Genetic
Algorithm and Its Applications to Manufacturing Robots," in IEEE
Transactions on Industrial Informatics, vol. 10, no. 3, pp. 1705-1716, Aug.
2014. [26] X. Li, "Niching Without Niching Parameters: Particle Swarm
Optimization Using a Ring Topology," in IEEE Transactions on
Evolutionary Computation, vol. 14, no. 1, pp. 150-169, Feb. 2010. [27] Y. H. Zhang, Y. J. Gong, H. X. Zhang, T. L. Gu and J. Zhang, "Toward
Fast Niching Evolutionary Algorithms: A Locality Sensitive
Hashing-Based Approach," in IEEE Transactions on Evolutionary Computation, vol. 21, no. 3, pp. 347-362, June 2017.
[28] S. Biswas, S. Kundu and S. Das, "Inducing Niching Behavior in
Differential Evolution Through Local Information Sharing," in IEEE Transactions on Evolutionary Computation, vol. 19, no. 2, pp. 246-263,
April 2015.
[29] S. Biswas, S. Kundu and S. Das, "An Improved Parent-Centric Mutation With Normalized Neighborhoods for Inducing Niching Behavior in
Differential Evolution," in IEEE Transactions on Cybernetics, vol. 44, no.
10, pp. 1726-1737, Oct. 2014. [30] W. Dong and M. Zhou, "Gaussian Classifier-Based Evolutionary Strategy
for Multimodal Optimization," in IEEE Transactions on Neural Networks
and Learning Systems, vol. 25, no. 6, pp. 1200-1216, June 2014. [31] W. Gao, G. G. Yen and S. Liu, "A Cluster-Based Differential Evolution
With Self-Adaptive Strategy for Multimodal Optimization," in IEEE
Transactions on Cybernetics, vol. 44, no. 8, pp. 1314-1327, Aug. 2014. [32] Y. Peng Y and B. L. Lu, "Hybrid learning clonal selection algorithm," in
Information Sciences, vol. 296, no. 19, pp. 128-146, 2015.
[33] Z. Hu, "A container multimodal transportation scheduling approach based on immune affinity model for emergency relief," in Expert Systems with
Applications, vol. 38, no.3, pp. 2632-2639, 2011.
[34] K. M. Woldemariam and G. G. Yen, "Vaccine-Enhanced Artificial Immune System for Multimodal Function Optimization," in IEEE
Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics),
vol. 40, no. 1, pp. 218-228, Feb. 2010. [35] Q. Xu, L. Wang and J. Si, "Predication based immune network for
multimodal function optimization," in Engineering Applications of
Artificial Intelligence, vol. 23, no.4, pp. 495-504, 2010. [36] Y. Lei, F. Jia, J. Lin, S. Xing and S. X. Ding, "An Intelligent Fault
Diagnosis Method Using Unsupervised Feature Learning Towards Mechanical Big Data," in IEEE Transactions on Industrial Electronics,
vol. 63, no. 5, pp. 3137-3147, May 2016.
[37] S. A. Hofmeyr and S. Forrest, "Architecture for an artificial immune system," in Evolutionary Computation, vol. 8, no. 4, pp. 443-473, 2000.
[38] J. S. Chun, H. K. Jung and S. Y. Hahn, "A study on comparison of
optimization performances between immune algorithm and other heuristic algorithms," in IEEE Transactions on Magnetics, vol. 34, no. 5,
pp. 2972-2975, Sep 1998.
[39] D. N. Cooper, E. V. and M. Krawczak M, "The human gene mutation database," in Nucleic Acids Research, vol. 26, no. 1, pp. 285-287, 1998.
[40] R. Brits, A. Engelbrecht, and F. van den Bergh, "A niching particle swarm
optimizer," In Proceedings of the 4th Asia-Pacific Conference on Simulated Evolution and Learning 2002, pp. 692–696, 2002.
[41] B. Sareni, L. Krahenbuhl and A. Nicolas, "Niching genetic algorithms for
optimization in electromagnetics. I. Fundamentals," in IEEE Transactions on Magnetics, vol. 34, no. 5, pp. 2984-2987, Sep 1998.
[42] N. Xu, Y. Ding, L. Ren and K. Hao, "Degeneration Recognizing Clonal
Selection Algorithm for Multimodal Optimization," in IEEE Transactions on Cybernetics, vol. 48, no. 3, pp. 848-861, March 2018.
[43] Ran Cheng, Miqing Li and X. Yao, "Parallel peaks: A visualization
method for benchmark studies of multimodal optimization," 2017 IEEE Congress on Evolutionary Computation (CEC), San Sebastian, 2017, pp.
263-270.
[44] G. P. Singh and A. Singh, "Comparative Study of Krill Herd, Firefly and Cuckoo Search Algorithms for Unimodal and Multimodal Optimization,"
in International Journal of Intelligent Systems and Applications, vol. 6, no.
3, pp. 35-49, Feb. 2014. [45] G. Ayorkor Korsah, , Anthony Stentz and M. Bernardine Dias, "A
comprehensive taxonomy for multi-robot task allocation," in The
International Journal of Robotics Research, vol. 32, no. 12, pp. 1495-1512, Oct. 2013.
[46] H. Yuan, J. Bi, W. Tan, M. Zhou, B. H. Li and J. Li, "TTSA: An Effective
Scheduling Approach for Delay Bounded Tasks in Hybrid Clouds," in

> REPLACE THIS LINE WITH YOUR PAPER IDENTIFICATION NUMBER (DOUBLE-CLICK HERE TO EDIT) <
12
IEEE Transactions on Cybernetics, vol. 47, no. 11, pp. 3658-3668, Nov.
2017.
Li Huang (S’17) received the B.S. degree from
Donghua University, Shanghai, China, in 2013, where
she is currently pursuing the Ph. D. degree in control science and engineering. She is now a visiting student
with the Helen and John C. Hartmann Department of
Electrical and Computer Engineering, New Jersey Institute of Technology, Newark, NJ, USA, supported by
the China Scholarship Council. Her research interests
include cooperative control and dynamic optimization of multi-robot systems and intelligent automation.
Dr. Yongsheng Ding (M’00-SM’05) is currently a Professor at College of Information Sciences and
Technology, Donghua University, Shanghai, China. He
obtained the B.S. and Ph.D. degrees in Electrical Engineering from Donghua University, Shanghai, China
in 1989 and 1998, respectively. He is a Changjiang
Distinguished Professor appointed by the Ministry of Education, China. From 1996 to 1998, he was a Visiting
Scientist at Biomedical Engineering Center, The
University of Texas Medical Branch, TX, USA. From February 2005 to April 2005, he was a Visiting Professor
at Department of Electrical and Computer Engineering, Wayne State
University, MI, USA. From September 2007 to February 2008, he was a Visiting Professor at Harvard Medical School, Harvard University, MA, USA.
He serves as Senior Member of Institute of Electrical and Electronics Engineers
(IEEE). He has published more than 300 technical papers, and ten research monograph/advanced textbooks. His scientific interests include computational
intelligence, network intelligence, intelligent Internet of things, big data
intelligence, and intelligent robots.
MengChu Zhou (S’88-M’90-SM’93-F’03) received his B.S. degree in Control Engineering from Nanjing
University of Science and Technology, Nanjing, China
in 1983, M.S. degree in Automatic Control from Beijing Institute of Technology, Beijing, China in 1986, and Ph.
D. degree in Computer and Systems Engineering from
Rensselaer Polytechnic Institute, Troy, NY in 1990. He
joined New Jersey Institute of Technology (NJIT),
Newark, NJ in 1990, and is now a Distinguished Professor of Electrical and Computer Engineering. His
research interests are in Petri nets, intelligent automation, Internet of Things, big data, web services, and intelligent
transportation. He has over 700 publications including 12 books, 400+ journal
papers (300+ in IEEE transactions), 11 patents and 28 book-chapters. He is the
founding Editor of IEEE Press Book Series on Systems Science and
Engineering and Editor-in-Chief of IEEE/CAA Journal of Automatica Sinica.
He is a recipient of Humboldt Research Award for US Senior Scientists from Alexander von Humboldt Foundation, Franklin V. Taylor Memorial Award and
the Norbert Wiener Award from IEEE Systems, Man and Cybernetics Society
for which he serves as VP for Conferences and Meetings. He is a life member of Chinese Association for Science and Technology-USA and served as its
President in 1999. He is a Fellow of International Federation of Automatic Control (IFAC), American Association for the Advancement of Science
(AAAS) and Chinese Association of Automation (CAA).
Dr. Kuangrong Hao is currently a Professor at the
College of Information Sciences and Technology, Donghua University, Shanghai, China. She obtained her
B.S. degree in Mechanical Engineering from Hebei
University of Technology, Tianjin, China in 1984, her M.S. degree from Ecole Normale Supérieur de Cachan,
Paris, France in 1991, and her Ph.D. degree in Mathematics and Computer Science from Ecole
Nationale des Ponts et Chaussées, Paris, France in 1995.
She has published more than 100 technical papers, and three research monographs. Her scientific interests include machine vision,
image processing, robot control, intelligent control, and digitized textile technology.
Yaochu Jin (M’98-SM’02-F’16) received the B.Sc., M.Sc., and Ph.D. degrees from Zhejiang University,
Hangzhou, China, in 1988, 1991, and 1996 respectively, and the Dr.-Ing. degree from Ruhr
University Bochum, Germany, in 2001. He is a
Professor in Computational Intelligence, Department of Computer Science, University of
Surrey, Guildford, U.K. He was also a Finland Distinguished Professor funded by the Finnish
Agency for Innovation and a Changjiang
Distinguished Visiting Professor appointed by the Ministry of Education, China. His main research interests include data-driven surrogate-assisted evolutionary
optimization, evolutionary multi-objective optimization, evolutionary learning,
interpretable and secure machine learning, and evolutionary developmental
systems. Dr. Jin is the Editor-in-Chief of the IEEE TRANSACTIONS ON
COGNITIVE AND DEVELOPMENTAL SYSTEMS and Co-Editor-in-Chief of Complex & Intelligent Systems. He is the recipient of the 2018 IEEE
Transactions on Evolutionary Computation Outstanding Paper Award, the 2015 and 2017 IEEE Computational Intelligence Magazine Outstanding Paper
Award. He is a Fellow of IEEE.