Embed Size (px)
DESCRIPTION
Motion Planning for Multiple Autonomous Vehicles. Results. Rahul Kala. Genetic Algorithms. Results. Vehicle position at the time of blockage. Blockage. Results - 2 vehicle. b. Results - Overtaking. Results – Vehicle Following. Rapidly-exploring Random Trees. Results – Single Vehicle. - PowerPoint PPT Presentation
Citation preview

School of Systems, Engineering, University of Reading
rkala.99k.orgApril, 2013
Motion Planning for Multiple Autonomous Vehicles
Rahul Kala
Results

Motion Planning for Multiple Autonomous Vehicles
GENETIC ALGORITHMS
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org
Vehicle position at the time of blockage
Blockage

Motion Planning for Multiple Autonomous Vehicles
Results - 2 vehicle
rkala.99k.org
b

Motion Planning for Multiple Autonomous Vehicles
Results - Overtaking
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Following
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RAPIDLY-EXPLORING RANDOM TREES
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Single Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Multi Vehicle
rkala.99k.org
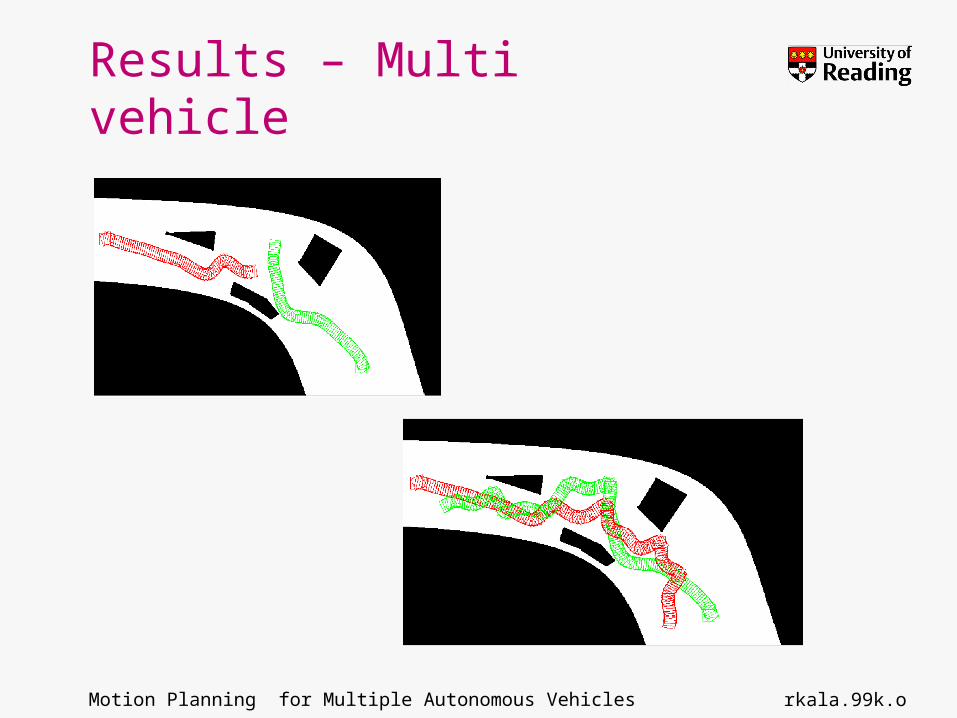
Motion Planning for Multiple Autonomous Vehicles
Results – Multi vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RAPIDLY-EXPLORING RANDOM TREES CONNECT
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Single Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results - Multi Vehicles
rkala.99k.org

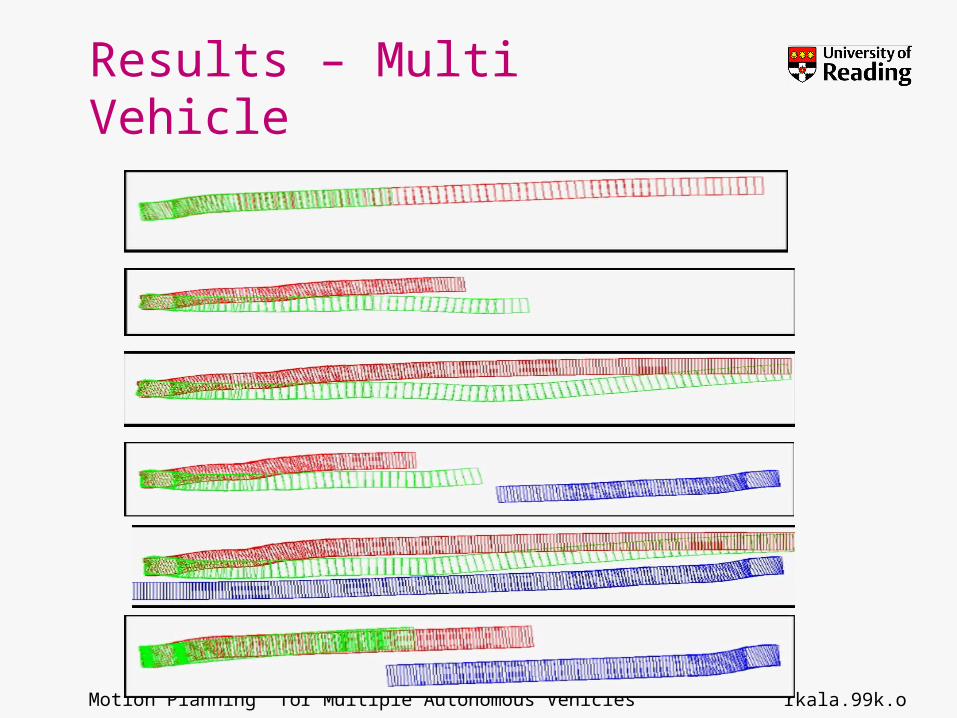
Motion Planning for Multiple Autonomous Vehicles
Results – Multi Vehicle
rkala.99k.org

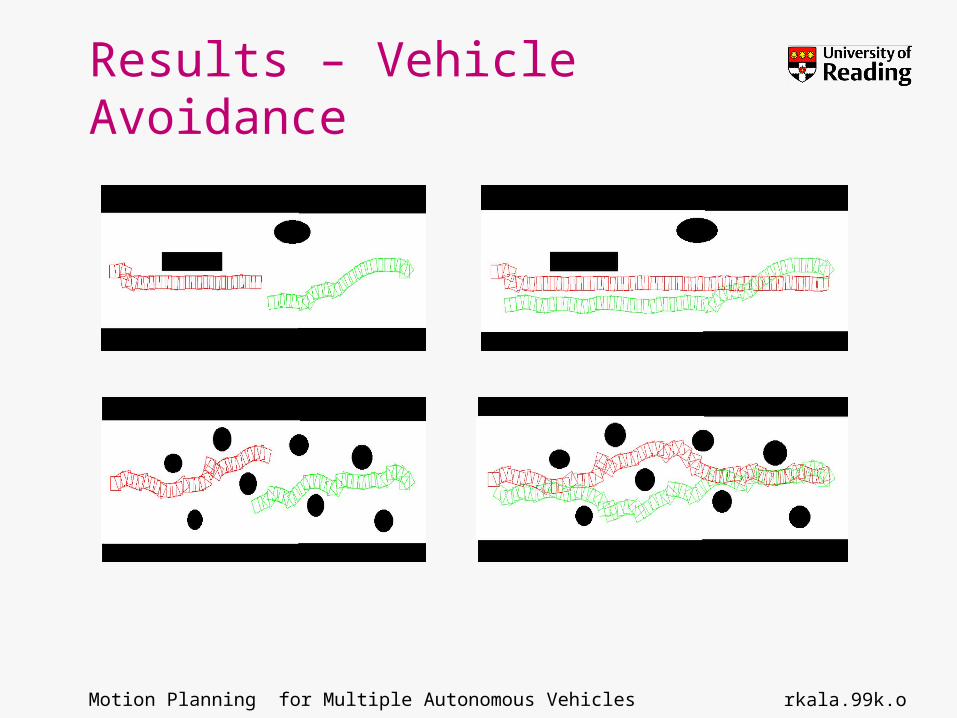
Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Avoidance
rkala.99k.org
Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Avoidance
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
MULTI LEVEL PLANNING
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Single Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Two Vehicles
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Two Vehicles
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results - Multi Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results - Overtaking
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Following
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
DYNAMIC DISTRIBUTED LANES
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
FUZZY LOGIC
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Single Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Avoidance
rkala.99k.org
Motion Planning for Multiple Autonomous Vehicles
Results – Multi Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Multi Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results - Crossing
rkala.99k.org
Motion Planning for Multiple Autonomous Vehicles
LATERAL POTENTIALS
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
ELASTIC STRIP
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
LOGIC BASED PLANNING
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results
rkala.99k.org
Equal aggression
factors
Unequal aggression
factors

Motion Planning for Multiple Autonomous Vehicles
Results – Aggression
Higher aggressive vehicle makes it to the end
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Single Lane Overtake
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles rkala.99k.org
Thank You
• Acknowledgements:
• Commonwealth Scholarship Commission in the United Kingdom
• British Council





























