Embed Size (px)
Citation preview

School of Systems, Engineering, University of Reading
rkala.99k.orgApril, 2013
Motion Planning for Multiple Autonomous Vehicles
Rahul Kala
Rapidly-exploring Random Trees
Presentation of paper: R. Kala, K. Warwick (2011) Multi-Vehicle Planning using RRT-Connect, Paladyn Journal of Behavioural Robotics, 2(3): 134-144.

Motion Planning for Multiple Autonomous Vehicles
Key Contributions• Inspired by the general motion of vehicles in
traffic, a planning strategy is proposed which is biased towards a vehicle’s current lateral position. This enables better tree expansion and connectivity checks.
• RRT generation is integrated with spline based curve generation for curve smoothing.
• The approach is designed and tested for many and complex obstacles in the presence of multiple vehicles.
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Why RRT• Computational expense (better than GA)• Probabilistically complete
Concerns • Sub-optimal
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RRT• Tree-based representation • Random point is sampled in the solution space• Closest node in the tree is selected and is
extended towards the sampled point by a constant called the step size.
• Extended node is added to the tree with the sampled node as parent
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RRT Expansion• First expansion in the heading direction of the
vehicle
• Samples generated using road coordinate axis system
• Sampling biased towards current lateral position of the vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RRT Expansion
rkala.99k.org
Source and direction
Goal

Motion Planning for Multiple Autonomous Vehicles
Curve Smoothing• Spline curves used for smoothing of every
expansion
• Smoothened tree used for checking:– Feasibility– Smoothness (non-hololomic constraints)– Collisions with the other vehicles
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Curve Smoothing
rkala.99k.org
max,min v
kv
)(2)()( ddtdik

Motion Planning for Multiple Autonomous Vehicles
Coordination• Priority based coordination
• Speed iteratively reduced till RRT finds a feasible path
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Single Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Generated RRT
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Multi Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Multi vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
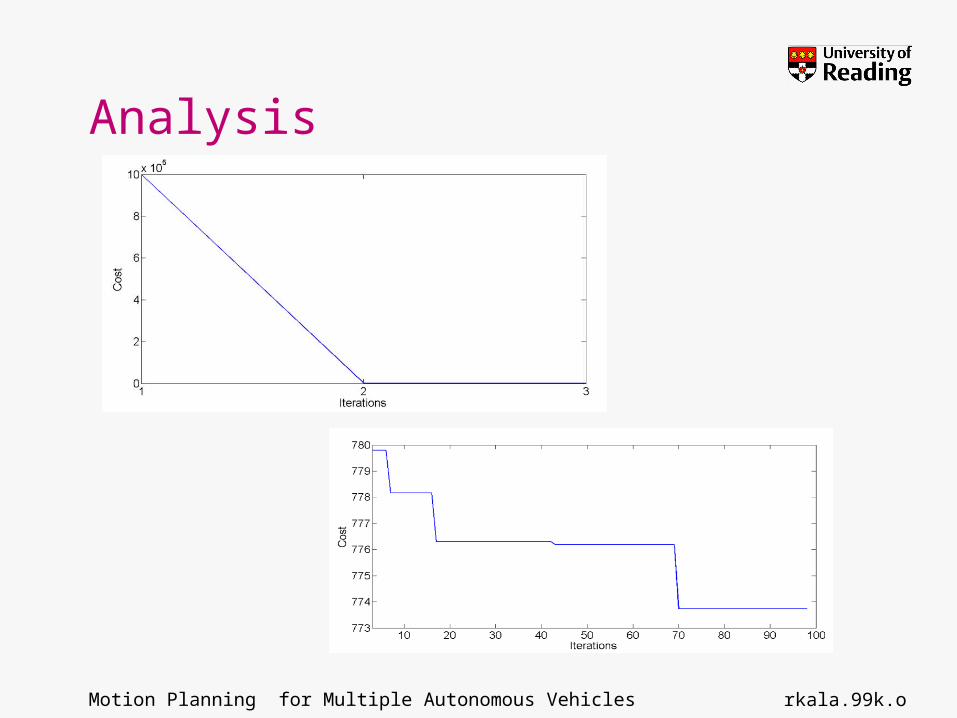
Analysis
rkala.99k.org
10 20 30 40 50 60 70 80 90 100 110 120 1300
100
200
300
400
500
600
700
800
Step Size
Num
ber
of n
odes
in tr
ee

Motion Planning for Multiple Autonomous Vehicles
Analysis
rkala.99k.org
10 20 30 40 50 60 70 80 90 100 110 120 1300
500
1000
1500
2000
2500
Step Size
Tot
al n
umbe
r of
iter
atio
ns

Motion Planning for Multiple Autonomous Vehicles
RRT-Connect• In addition to RRT, extension is carried out in
the extended direction to check a direct connectivity to the goal
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Key Contributions• The planning algorithm can be used with very low
computational requirements for very simple behaviours, while higher computation may enable near-optimal performance.
• A decision making module is proposed for choosing between vehicle following and overtaking behaviours. The module relies on a fast planning lookup.
• The algorithm uses the notion of first building an approximate path and then optimizing it which induces an iterative nature to the algorithm, unlike the standard RRT approaches which invest computation to build a precise path.
• The algorithm uses multiple RRT instances to be assured of being near global optima, which is largely possible due to the fast approximate path construction. rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Key Concepts• No curve smoothing used in RRT generation to
save computations, smoothness approximately checked
• Vehicle following behaviour takes unit computation, only 1 node expanded which has a direct connectivity to the goal
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Local Optimization• RRT-Connect called multiple times for global
optimality – best solution worked further
• Local optimization used on the best solution induce local optimality
• Spline curves are used in local optimization
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Coordination• Priority based coordination• Speed
rkala.99k.org
For vehicles in the same direction: If you cannot overtake, follow – Speed equal to the heading vehicle
For vehicles in the opposite direction: Decrease speed iteratively till a feasible plan is reached

Motion Planning for Multiple Autonomous Vehicles
Results – Single Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results - Multi Vehicles
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Multi Vehicle
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Avoidance
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
Results – Vehicle Avoidance
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RRT Generation
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles
RRT Generation – 2 Vehicles
rkala.99k.org
Motion Planning for Multiple Autonomous Vehicles
Analysis
rkala.99k.org

Motion Planning for Multiple Autonomous Vehicles rkala.99k.org
Thank You
• Acknowledgements:• Commonwealth Scholarship Commission in the United Kingdom • British Council
![Covering space with simple robots: from chains to random treesrobotics.cs.tamu.edu/dshell/papers/icra13rrt.pdfdata-structure, the Rapidly-exploring random tree (RRT) [4]. In fact,](https://img.dokumen.tips/doc/110x75/60947cc320669c1b641e5986/covering-space-with-simple-robots-from-chains-to-random-data-structure-the-rapidly-exploring.jpg)






![Intelligent bidirectional rapidly-exploring random trees ... · (PRM) [14] [15] and Rapidly exploring Random Trees (RRT) [23]. However, PRMs tend to be ine cient when obstacle geometry](https://img.dokumen.tips/doc/110x75/5fed728ed484d45f7e7546fc/intelligent-bidirectional-rapidly-exploring-random-trees-prm-14-15-and.jpg)





















![Robotic Motion Planning: RRT’smotionplanning/lecture/lec20.pdf · 2007. 11. 5. · Rapidly-Exploring Random Trees (RRTs) [Kuffner, Lavalle] The Basic RRT single tree bidirectional](https://img.dokumen.tips/doc/110x75/60f00c9195ca203cda2c94d8/robotic-motion-planning-rrtas-motionplanninglecturelec20pdf-2007-11-5.jpg)