Embed Size (px)
Citation preview

Faculteit Wetenschappen
Vakgroep Vastestofwetenschappen
Voorzitter: Prof. Dr. F. Callens
Micromagnetische modellering van
antiferromagnetische grenslagen
door
Tamir Mazaev
Promotor: Prof. Dr. B. Van Waeyenberge
Scriptiebegeleider: Dr. J. Leliaert
Scriptie ingediend tot het behalen van de academische graad van
Master in de Fysica en Sterrenkunde
Academiejaar 2015–2016

DANKWOORD i
Dankwoord
Met deze masterthesis beeindig ik mijn studies aan de faculteit Wetenschappen aan de
Universiteit Gent. Graag bedank ik enkele mensen die mij gesteund hebben doorheen mijn
studiejaren en bij het schrijven van dit eindwerk.
Ten eerste wens ik mijn promotor Bartel Van Waeyenberge te bedanken voor het delen van
zijn uitgebreide ervaring. Dankzij zijn inspanningen en oordeelkundige opmerkingen kon ik
altijd toegewijd en gericht aan mijn onderzoek werken. Bij het bedrijven van wetenschap is
het opduiken van een occasionele verhindering onvermijdelijk, maar ik was altijd welkom
in zijn bureau voor advies om deze aan te pakken. Ook zou ik mijn thesisbegeleider
Jonathan Leliaert willen bedanken. Hij was altijd bereid om samen naar antwoorden te
zoeken op mijn vragen, onderzoeksinformatie te verschaffen, of mijn thesis na te lezen
op fouten. Doorheen het academiejaar was zijn passie voor wetenschappelijk onderzoek
gedurig voelbaar, wat mij inspireerde om mijn werk tot een goed einde te brengen. Ik
hoop dat deze passie verder blijft groeien in zijn academische carriere.
Eveneens wens ik mijn medestudenten Jasper, Rafael, Lars, Alexandro, Hannah, Arne,
Cys en Andreas bedanken voor het aanbieden van een luisterend oor en voor de gezellige
momenten binnen en buiten het academisch leven. Ik wil ook de personen bedanken die
mij een onvergetelijk 1ste masterjaar bezorgd hebben in Zweden: David, Patrick, Aysuhan,
Lauren, Piro, Esha, Andrii, Rebi, Rodrigo en Elzina.
Ten slotte wens ik ook mijn ouders en broer, en bij uitbreiding de rest van de familie te
bedanken voor hun onvoorwaardelijke steun. In het bijzonder wens ik hen te bedanken
voor de mogelijkheden die ze mij geboden hebben gedurende de afgelopen jaren.
Tamir Mazaev, juni 2016

TOELATING TOT BRUIKLEEN ii
Toelating tot bruikleen
“De auteur geeft de toelating deze scriptie voor consultatie beschikbaar te stellen en delen
van de scriptie te kopieren voor persoonlijk gebruik.
Elk ander gebruik valt onder de beperkingen van het auteursrecht, in het bijzonder met
betrekking tot de verplichting de bron uitdrukkelijk te vermelden bij het aanhalen van
resultaten uit deze scriptie.”
Tamir Mazaev, juni 2016

INHOUDSOPGAVE iii
Inhoudsopgave
Dankwoord i
Toelating tot bruikleen ii
Inhoudsopgave ii
1 Inleiding 1
2 Micromagnetisme 3
2.1 Magnetostatica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Exchange energie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.2 Anisotropie energie . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.3 Energie van het demagnetiserend veld . . . . . . . . . . . . . . . . . 5
2.1.4 Energie van het extern veld . . . . . . . . . . . . . . . . . . . . . . 6
2.1.5 Brown’s vergelijkingen . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Magnetodynamica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 MuMax3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3 Implementatie van een semi-impliciete numerieke integrator 10
3.1 Numerieke integratie van de Landau-Lifshitz vergelijking . . . . . . . . . . 10
3.2 µMag standaard probleem 4 . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.2.1 Illustratie van numerieke onstabiliteit . . . . . . . . . . . . . . . . . 14
3.3 Adams-Bashforth-Moulton methodes . . . . . . . . . . . . . . . . . . . . . 15
3.3.1 Predictor-corrector methodes . . . . . . . . . . . . . . . . . . . . . 17
3.3.2 De nood aan een semi-impliciete methode . . . . . . . . . . . . . . 18
3.4 Testen van AB1M2 en AB2M3 . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.4.1 Een eerste controle . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.4.2 Orde van convergentie . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4.3 Performantie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21

INHOUDSOPGAVE iv
4 Modelleren van exchange bias 24
4.1 Het fysisch fenomeen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Analytische modellering . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2.1 Ongecompenseerde spins . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2.2 Gecompenseerde spins . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.2.3 Consistentie van de kleine-hoekbenadering . . . . . . . . . . . . . . 32
4.3 Toepassingen van het model . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.3.1 Exchange bias in een volledig metallisch systeem . . . . . . . . . . . 33
4.3.2 Exchange bias in complexe oxides . . . . . . . . . . . . . . . . . . . 36
4.3.3 Illustratie van exchange bias met AFM gebieden met verschillende
orientaties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5 Besluit 42
A Broncode in MuMax3 44
A.1 Adams-Bashforth methodes . . . . . . . . . . . . . . . . . . . . . . . . . . 44
A.1.1 AB1M2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
A.1.2 AB2M3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
A.2 FM/AFM grenslaag interacties . . . . . . . . . . . . . . . . . . . . . . . . 48
Bibliografie 53

INLEIDING 1
Hoofdstuk 1
Inleiding
Het natuurverschijnsel magnetisme is al behoorlijk lang gekend bij de mens. De eerste
referentie naar het magnetisch materiaal magnetiet, of zeilsteen, kan rond 800 v.C. ge-
vonden worden in de Griekse literatuur. Later - in de middeleeuwen - werden in Europa
en Azie magneten vervaardigd uit ijzer die dienst deden als kompas. Het belang van dit
navigatieinstrument in dit tijdperk hoeft geen betoog. Vandaag is magnetisme een ui-
terst actueel onderwerp binnen de wetenschap, die al 4 revolutionaire veranderingen heeft
ondergaan in 20ste eeuw - het begrip van de fundamentele fysica, de extensie naar hoog-
frequente toepassingen, het onstaan van talloze consumentenapplicaties en de opkomst van
de spinelektronica. Onderzoeksgebieden zoals de informatietechnologie of de biomedische
wetenschappen zouden er ongetwijfeld zeer anders uitzien zonder kennis van dit fundamen-
teel natuurkundig fenomeen.
In economische termen is magnetische geheugenopslag de belangrijkste toepassing van de
studie van magnetische materialen. Magnetische harde schijven vormen een essentieel
onderdeel van zeer veel desktop computers, datacentra en ingebedde computersystemen.
De ontdekking van een beter magnetisch materiaal of een kleine verbetering in de reeds
gebruikte materialen kan economisch gezien al meteen grote gevolgen hebben. Er zijn
verschillende redenen waarom magneten zo geschikt zijn voor dataopslag. De gebruikte
materialen zijn goedkoop, en kunnen in grote hoeveelheden geproduceerd worden. Het
opslaan van informatie kan reversibel gemaakt worden, en het behoud van de data kan
zeer robust gemaakt worden tegen externe verstoringen.

INLEIDING 2
De manier waarop fysica tegenwoordig bedreven wordt, deelt men vaak op in 3 methodie-
ken: theoretiseren, simuleren en experimenteren. In dit thesiswerk concentreren we ons op
de eerste twee hiervan. In hoofdstuk 2 wordt eerst een inleiding gegeven tot de fysische
grondslagen van het micromagnetisme. In dit domein van de fysica wordt het magnetische
gedrag beschreven op lengteschalen kleiner dan een micrometer. De lengteschalen zijn groot
genoeg om de atomaire structuur van het materiaal te verwaarlozen, maar klein genoeg
om magnetische structuren waar te nemen zoals vortices of domeinmuren. Hierin speelt de
zogenaamde Landau-Lifshitz vergelijking een centrale rol. Dit is een normale differentiaal-
vergelijking die het dynamisch gedrag binnen de micromagnetisme beschrijft. In hoofdstuk
3 onderzoeken we methodes die deze vergelijking op een efficiente manier kunnen oplossen.
De nadruk wordt hier vooral gelegd op de onderliggende numerieke wiskunde. We kijken
naar semi-impliciete methodes, een bepaalde klasse van numerieke integratoren voor de
oplossing van differentiaalvergelijkingen. In hoofdstuk 4 komt fysische modellering meer
aan bod. We doen onderzoek naar het exchange bias effect, een gevolg van de interactie
tussen een ferromagneet in contact met een antiferromagneet. Dit effect heeft als gevolg
dat de complete hysteresislus van de ferromagneet over een bepaalde veldgrootte verscho-
ven wordt. Exchange bias is van enorm belang in de magnetische opslagindustrie, waar het
gebruikt wordt om de leeskoppen van magnetische harde schijven vast te pinnen op een
welbepaalde positie. Hoewel het effect van groot technologisch belang is, ontbreekt nog
een sluitende theoretische beschrijving van het fenomeen. Dit is te wijten aan de enorme
complexiteit van de grenslaag tussen de ferro- en de antiferromagneet, waarin rekening
moet gehouden worden met een groot aantal parameters. In dit hoofdstuk stellen we ons
eigen analytisch model op voor dit probleem - niet met als doel om al deze complexiteit in
rekening te brengen, maar om een nuttige modelleringstool te ontwikkelen.

MICROMAGNETISME 3
Hoofdstuk 2
Micromagnetisme
Micromagnetisme is ontstaan uit het werk van Landau en Lifshitz in 1935 om het gedrag
van ferro- en ferrimagnetische systemen te beschrijven [1]. De basisaanname van micro-
magnetisme is dat een magneet wordt opgevat als een mesoscopisch, continue medium
waarin de atomaire structuur verwaarloosd wordt, maar waarin magnetische structuren als
domeinmuren en vortices nog steeds geresolveerd kunnen worden. Ferro- en ferrimagne-
tische systemen worden gekarakteriseerd door een spontane magnetisatie MS - het netto
magnetisch moment per eenheidsvolume als gevolg van de magnetische ordening, dat zelfs
optreedt zonder het aanleggen van een extern magnetisch veld. De lokale magnetisatie
M (r, t) kan dan uitgedrukt worden alsM (r, t) = MSm(r, t)
|m(r, t)| = 1
met m(r, t) de gereduceerde magnetisatievector. Het is dit genormaliseerd, continue vec-
torveld waarmee micromagnetische systemen worden beschreven.
Er zijn 2 verschillende manieren om vanuit een bepaalde startconfiguratie de uiteindelijke
magnetische toestand te berekenen. Enerzijds kan de magnetische energie geminimaliseerd
worden om de statische equilibria te bekomen. Anderszijds kan het dynamisch gedrag be-
studeerd worden, waarbij de Landau-Lifshitz vergelijking expliciet wordt opgelost, zijnde de
heersende, tijdsafhankelijke dynamische vergelijking binnen het formalisme. Beide worden
in de volgende paragrafen besproken.

2.1 Magnetostatica 4
2.1 Magnetostatica
De totale energie E (eenheid: J) die geminimimaliseerd dient te worden, is de som van de
volgende termen:
E = Eex + Ea + Ed + EZ . (2.1)
Deze representeren respectievelijk de energietermen voor de uitwisselingsinteractie, de mag-
netokristallijne anisotropie, het demagnetiserend veld, en de energie als gevolg van een
extern aangelegd veld. Elke term zal nu behandeld worden.
2.1.1 Exchange energie
De uitwisselingsenergie wordt gegeven door de volgende volume-integraal over het sample:1
Eex =
∫A(∇m)2d3r (2.2)
met A de uitwisselingsconstante (eenheid: J/m). Dit is dus de fenomenologische, continue
beschrijving van de kwantummechanische uitwisselingsinteractie. De invloed van deze term
is dat de magnetisatie m zo weinig mogelijk zal varieren op korte afstand in alle richtingen.
Deze term is dus minimaal voor een uniform veld (zie Fig. 2.1 (a)).
2.1.2 Anisotropie energie
Door de kristalstructuur van een magnetisch materiaal kunnen richtingen optreden in het
sample die de magnetisatie preferentieel zal volgen. Dit wordt de magnetokristallijne ani-
sotropie genoemd. Zo wordt de energieterm voor de uniaxiale anisotropie een reeksontwik-
keling in de hoek θ die de magnetisatie maakt met deze voorkeursrichting:
Ea =
∫K1 sin2(θ) +K2 sin4(θ) + ...d3r. (2.3)
Hier zijn K1 en K2 materiaalspecifieke constanten (eenheid J/m3) die experimenteel be-
paald kunnen worden. Andere mogelijke anisotropieen naast de uniaxiale vorm zijn de
varianten met meerdere voorkeursrichtingen, zoals de kubische, tetragonale of hexagonale
anisotropieen.

2.1 Magnetostatica 5
(a) (b) (c) (d)
Figuur 2.1: Illustratie van verschillende magnetische configuraties. (a) vertoont de optimale
configuratie voor Eex, een uniform veld. (b) en (c) vertonen meerdere domeinen
als gevolg van het demagnetiserend veld. (d) een realistische toestand met afsluit-
domeinen, waardoor bijna geen uitgaande veldlijnen meer optreden
2.1.3 Energie van het demagnetiserend veld
Het demagnetiserend veld Hd is het veld dat inwerkt op de magneet als gevolg van zijn
eigen magnetisatie. De geassocieerde energieterm wordt gegeven door
Ed =−µ0MS
2
∫m ·Hd d
3r. (2.4)
Deze term zorgt ervoor dat een magnetisch moment de andere momenten wil aligneren
volgens zijn eigen veld, en werkt het veel sterkere exchange veld dus tegen. Het verschil
is dat een demagnetiserend veld werkt op lange afstand, waardoor toch een evenwicht kan
ontstaan tussen de 2 krachten. Dit wordt geıllustreerd in Figuur 2.1. Het onstaan van
meerdere domeinen in configuraties (b), (c) en (d) is een gevolg van de langedrachtsinter-
acties. Dit geeft aanleiding tot zogenaamde domeinwanden, de overgangsbieden tussen de
verschillende domeinen. Deze zullen dus extra energie met zich meebrengen door de ex-
change term. Een ruwe manier om in te schatten wat de uiteindelijke configuratie zal zijn
die de totale energie minimaliseert in een systeem met meerdere domeinen, is het charge
avoidance principe [3]. Deze stelt dat m zal trachten om parallel te liggen aan de wanden
van het sample, aangezien de ontstane uitgaande veldlijnen anders aanleiding geven tot een
hoge energiekost. De toestand in (d) vertoont zogenaamde afsluitdomeinen. Deze situatie
sluit aan bij het principe en vormt een typische configuratie voor ferromagneten met deze
1we laten de argumenten van de magnetisatie vallen en schrijven m = m(r, t)

2.1 Magnetostatica 6
geometrie.
Door zijn werking op lange afstand, is de berekening van het demagnetiserend veld het
meest tijdrovende deel van een micromagnetische simulatie [8]. Vanuit een numeriek oog-
punt is een efficiente berekening van deze interacties dus zeer belangrijk.
2.1.4 Energie van het extern veld
Een extern aangelegd veld H geeft aanleiding tot de volgende term
EZ = −µ0MS
∫m ·H d3r. (2.5)
De interpretatie hiervan is eenvoudig: door deze term zal m trachten om zich te aligneren
volgens het externe veld.
2.1.5 Brown’s vergelijkingen
Het minimaliseren van Vgl. (2.1) komt neer op het vinden van een oplossing waarbij de
magnetisatierichting stabiel is in elk punt, onderhevig aan randvoorwaarden. We definieren
een lokaal effectief veldHeff , die proportioneel is met de variationeel afgeleide van de totale
energie:
Heff = − 1
µ0MS
δEtotδm
(2.6)
= − 2A
µ0MS
∆m+K1
µ0MS
(uK ·m)uK +Hd +H, (2.7)
waarbij uitgegaan is van een 1ste orde uniaxiale anisotropie, met uK de bijhorende rich-
tingsvector.
Zodoende mag dit veld geen krachtmoment uitvoeren op m bij evenwicht, wat neerkomt
op de voorwaarde
m×Heff = 0. (2.8)
Vergelijkingen (2.6) en (2.8) worden Brown’s micromagnetische vergelijkingen genoemd, en
dienen opgelost te worden samen met de volgende randvoorwaarde op het oppervlak S van
het magnetisch systeem:
∂m
∂n
∣∣∣∣S
= 0, (2.9)
waarbij n de loodrechte vector op S voorstelt waar m geevalueerd wordt. (De afleiding
van deze formules uit de variatie van de totale energie kan gevonden worden in [2].)

2.2 Magnetodynamica 7
2.2 Magnetodynamica
Figuur 2.2: Gedempte precessie van het magnetisch veld m rond het effectief veld Heff [9].
Richtingen a en b wijzen respectievelijk in de richting van de precessie- en dempings-
term in de Landau-Lifshitz vergelijking. De volledige oplossing is in stippellijnen
aangeduid en spiraleert uiteindelijk naar Heff .
Uit de minimalisatie van de energie in Vgl. (2.1) volgt gewoonlijk een reeks lokale minima
die overeenkomen met metastabiele equilibria. Gegeven een bepaalde initiele toestand, kan
men dus niet weten welke van deze metastabiele toestanden zullen bereikt worden. Er is
nood aan een gepaste dynamische vergelijking die de evolutie van het systeem zal beschrij-
ven. Het eerste dynamische model voor de precessionele beweging van de magnetisatie
werd opgesteld door Landau en Lifshitz in 1935. Dit wordt de Landau-Lifshitz vergelijking
genoemd [11]:
∂m
∂t= −γm×Heff −
λ
MS
m× (m×Heff ) (2.10)
met γ (eenheid: rad.T−1.s−1) de gyromagnetische verhouding van het elektron, en λ een
fenomenologische dempingsterm (eenheid: rad.J−1.A2.m). Het effectieve veld Heff is het
veld dat de magnetisatievector lokaal ondervindt. Het effect van de twee termen wordt
geıllustreerd in Figuur 2.2. De eerste term komt overeen met richting a, dit is de rotatio-
nele beweging van de magnetisatievector rond het effectieve veld, en is conservatief in de
energie. Indien enkel deze term zou meegenomen worden, zou m oneindig rond Heff pre-
cesseren. Om een realistisch proces te modelleren, moet er ook energiedissipatie optreden.

2.3 MuMax3 8
De tweede term komt overeen met richting b, een dissipatieve dempingsterm die m in de
richting van Heff duwt. Het resulterend pad is getekend in stippellijnen: m spiraleert
rond Heff tot het er mee samenvalt. Merk op dat de gereduceerde magnetisatie m met
eenheidslengte 1 niet van grootte veranderd.
Hier komt de continuumbeschrijving van het micromagnetisch formalisme duidelijk naar
voor. Aangezien de atomaire vrijheidsgraden verwaarloosd worden, is een artificiele dis-
sipatieterm vereist die de energiedissipatie naar deze vrijheidsgraden in rekening brengt.
Deze irreversible term maakt het systeem niet-Hamiltoniaans.
2.3 MuMax3
MuMax3 is een GPU-versneld, micromagnetisch simulatieprogramma, geschreven in Go
en CUDA. Het werd ontwikkeld in het DyNaMat-labo aan de Vakgroep Vastestofweten-
schappen aan de UGent. Deze software dient om magneten op micro- en nanoschaal te
bestuderen. De spatiale en temporale evolutie van de magnetisatie wordt opgelost door
gebruik te maken van een eindige-differentie discretisatie (Engels: finite difference discre-
tization) [10].
De afgeleide naar de tijd van m wordt gegeven door het moment τ (eenheid 1/s): ∂m∂t
= τ .
Deze bestaat uit meerdere contributies, maar wij zijn slechts geınteresseerd in 1 ervan: het
Landau-Lifshitz moment τLL2. Dit moment komt overeen met de drijvende term in de
Landau-Lifshitz vergelijking (2.10). De expliciete vorm van deze vergelijking gebruikt in
MuMax3 wordt gegeven door:
τLL = γ1
1 + α2(m×Beff + α (m× (m×Beff ))) (2.11)
met opnieuw γ de gyromagnetische verhouding (eenheid: rad/T s), α de dimensieloze
dempingsparameter en Beff = µ0Heff het effectief, magnetisch veld (eenheid: T). Wij
zijn geınteresseerd in de volgende contributies tot Beff :3
• extern aangelegd veld Bext
• magnetostatisch veld Bdemag
2verdere contributies zijn het Zhang-Li spin-transfer moment τZL en het Slonczweski spin-transfer
moment τSL3een mogelijke bijkomende term is het Dzyaloshinkii-Moriya uitwisselingsveld Bdm

2.3 MuMax3 9
• Heisenberg uitwisselingsveld Bexch
• magneto-kristallijn anisotropieveld Banis
• thermisch veld Btherm
Behalve het veld Btherm, komen deze termen overeen met de eerder besproken energieter-
men in Sectie 2.1. De integratie van Vgl. 2.11 komt uitgebreid aan bod in het volgende
hoofdstuk.
IMPLEMENTATIE VAN EEN SEMI-IMPLICIETE NUMERIEKE INTEGRATOR 10
Hoofdstuk 3
Implementatie van een
semi-impliciete numerieke integrator
3.1 Numerieke integratie van de Landau-Lifshitz ver-
gelijking
Door de niet-lineaire aard van de Landau-Lifshitz vergelijking (2.10), kan een analytische
oplossing slechts in een zeer beperkt aantal gevallen gevonden worden. De meest gebruikte
manier om de magnetisatiedynamica te onderzoeken, is door middel van numerieke inte-
gratiemethoden [13]. De ruimte wordt opgedeeld in een 2D of 3D grid van ruimtelijke
cellen. Hierdoor kan de volledige magnetisatietoestand opgeslagen worden in 1 vector m.
De Landau-Lifshitz vergelijking heeft de vorm van een gewone differentiaalvergelijking.
Gegeven een initiele magnetisatietoestand op dit rooster, wordt de evolutie in discrete
tijdstappen uitgerekend. We formuleren dit in de standaardvorm van een beginvoorwaar-
deprobleem zonder expliciete tijdsafhankelijkheid [14]:
dm
dt= τLL(m), m(t0) = m0, t ∈ [t0, tN ], (3.1)
waarbij de drijvende functie van de differentiaalvergelijking dus gegeven wordt door het
moment τLL. De oplossing is een sequentie van punten (t1,m1),(t1,m1),...(tN ,mN) die de
exacte oplossing benaderen, i.e. mn ≈m(tn). Het verschil tussen 2 opeenvolgende tijdop-
names hn = tn+1−tn wordt de stapgrootte genoemd. Als een constante stapgrootte gebruikt
wordt, dan kunnen we dit schrijven als h. Het basisidee van een eindige-differentiemethode
(EDM) is dat de afgeleide in Vgl. (3.1) wordt benaderd door een differentieformule. Twee
mogelijke manieren om dit te bereiken zijn de voorwaartse Euler (3.2) en achterwaartse

3.1 Numerieke integratie van de Landau-Lifshitz vergelijking 11
Euler (3.3) benaderingen
dm
dt(tn) =
m(tn+1)−m(tn)
h+O(h) (3.2)
dm
dt(tn) =
m(tn)−m(tn−1)
h+O(h) (3.3)
Beide methodes zijn accuraat tot op 1ste orde, aangezien de afrondingsfout op de oplossing
evenredig is aan h, op voorwaarde dat h klein genoeg is. Als we (3.2) toepassen op het
het beginvoorwaardeprobleem (3.1), dan krijgen we Euler’s expliciete methode (ook wel
Euler’s voorwaartse methode genoemd)mn = mn−1 + hτLL(mn−1), u0 = u(0)
tn = tn−1 + h, t0 = t(0), n = 1, 2, ..., N(3.4)
Als (3.3) gebruikt wordt, dan krijgen we Euler’s impliciete methode (ook wel Euler’s ach-
terwaartse methode genoemd)mn = mn−1 + hτLL(mn), u0 = u(0)
tn = tn−1 + h, t0 = t(0), n = 1, 2, ..., N(3.5)
We zien dat bij de expliciete Euler methode het paar (tn−1, un−1) aan de rechterzijde ge-
bruikt wordt om het volgende punt paar (tn,mn) te berekenen. In de impliciete Euler
methode moet echter een (in het algemeen) niet-lineaire vergelijking opgelost worden in
mn om dit punt te verkrijgen. Hierdoor wordt (3.4) een expliciete methode genoemd, en
(3.5) een impliciete methode.
Hoewel het gebruik van de impliciete Euler methode computationeel gezien veel meer
inspanningen vraagt (zie Sectie 3.3), kan het toch voordeliger zijn om deze methode te ge-
bruiken. Dit om numerieke stabiliteitsredenen bij het oplossen van stijve problemen [15].
Er bestaat nog geen consensus over een rigoureuze definitie van stijfheid bij het oplossen
van gewone differentiaalvergelijkingen. We beschrijven dit bondig met een intuıtief cri-
terium. Een gewone differentiaalvergelijking is stijf wanneer de oplossing traag varieert,
maar waarbij nabij gelegen trajecten bestaan die snel varieren. Hierdoor wordt de nume-
rieke methode gedwongen om zeer kleine tijdstappen te nemen, hoewel de oplossing zeer
weinig lijkt te veranderen. We zullen dit concept illustreren met een voorbeeld in Sectie
3.2.1.
De bovenstaande Euler methodes zijn zeer eenvoudig om te implementeren, maar worden in
de praktijk zelden gebruikt. De belangrijkste reden hiervoor is hun 1ste orde accuraatheid,

3.2 µMag standaard probleem 4 12
waardoor een onbruikbaar kleine tijdstap vereist is voor de integratie [16]. MuMax3 maakt
gebruik van een aantal expliciete Runge-Kutta methodes om de Landau-Lifshitz vergelij-
king te integreren (zie Sectie 3.4 voor een beschrijving van de methodes). Een belangrijk
voordeel om toch explciete integratoren te gebruiken, is door hun lage vereisten qua ge-
heugenopslag. Dit is een belangrijke voorwaarde om grootschalige simulaties efficient op
grafische kaarten te laten uitvoeren [17].
In Sectie (3.3) beschrijven we een klasse van methodes waarmee we zowel de stabiliteit
van een impliciete methode als een laag geheugenverbuik trachten te combineren: de semi-
impliciete Adams-Bashforth-Moulton methodes (ABM-methodes).
3.2 µMag standaard probleem 4
Als referentiemaat voor onze implementatie van de ABM-methodes gebruiken we het 4de
micromagnetisch standaardprobleem opgesteld door de µMag modelleringsgroep [18]. Dit
probleem is gericht op de dynamische aspecten van micromagnetische berekeningen.
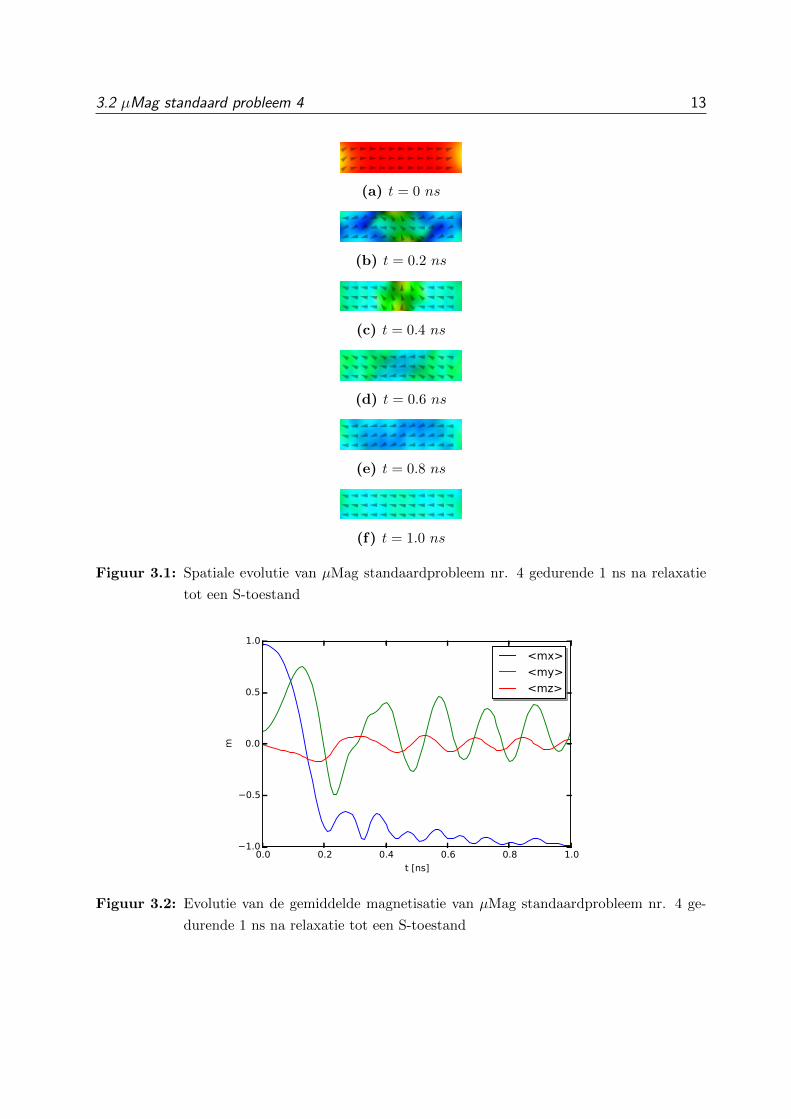
Een permalloy magneet (Aex = 1.3 × 10−11J/m, Msat = 8 × 105A/m) met dimensies
500 nm×125 nm×3 nm wordt in een S-vormige toestand gebracht na saturatie in de (1,1,1)
richting (zie Fig. 3.1 (a)). Daarna wordt de magnetisatie van richting veranderd door een
extern veld van (-24.6,4.3, 0) mT aan te leggen. De spatiale evolutie over een periode van
1 ns wordt visueel voorgesteld in Fig. 3.1. In Fig. 3.2 wordt de gemiddelde magnetisatie in
de 3 Cartesische hoofdrichtingen geplot. Gebruik makende van de implementatie van onze
nieuwe numerieke methode, wordt het resultaat voor dit fysisch testprobleem vergeleken
met de referentieoplossing.
3.2 µMag standaard probleem 4 13
(a) t = 0 ns
(b) t = 0.2 ns
(c) t = 0.4 ns
(d) t = 0.6 ns
(e) t = 0.8 ns
(f) t = 1.0 ns
Figuur 3.1: Spatiale evolutie van µMag standaardprobleem nr. 4 gedurende 1 ns na relaxatie
tot een S-toestand
0.0 0.2 0.4 0.6 0.8 1.0t [ns]
1.0
0.5
0.0
0.5
1.0
m
<mx><my><mz>
Figuur 3.2: Evolutie van de gemiddelde magnetisatie van µMag standaardprobleem nr. 4 ge-
durende 1 ns na relaxatie tot een S-toestand

3.2 µMag standaard probleem 4 14
3.2.1 Illustratie van numerieke onstabiliteit
Figuur 3.3: Evolutie van de gemiddelde magnetisatie van µMag standaardprobleem nr. 4 voor
2 verschillende tijdstapgroottes h, en de overeenkomstige fout vergeleken met de
referentieoplossing. Het gele gebied duidt het tijdsinterval aan waarin met opzet
een tijdstap gekozen werd met een onstabiele oplossing.
In Figuur 3.3 wordt de stijfheid van een micromagnetische probleem geıllustreerd. Zo-
als men kan zien in de stabiele oplossing van µMag standaardprobleem nr. 4, blijft het
systeem in een zeer statische toestand na ongeveer 2 ns. Hieruit zou men verkeerde-
lijk kunnen besluiten dat een grote tijdstap kan gekozen worden om deze statische toe-

3.3 Adams-Bashforth-Moulton methodes 15
stand verder te kunnen integreren op een efficiente manier. Als voorbeeld nemen we een
tijdstap die 5 keer groter is dan de stabiel gekozen tijdstap (h = 3.15 ps). Hiervoor
wordt de oplossing helemaal onstabiel. De totale fout op de magnetisatie (error(m) =
error(√< mx >2 + < my >2 + < mz >2) ) fluctueert rond een waarde van 1, waardoor de
oplossing helemaal niet representatief is.
3.3 Adams-Bashforth-Moulton methodes
In de Euler methode wordt in de benaderde oplossing enkel gekeken naar de waarden van
de oplossing en afgeleiden in de vorige tijdstap. Men kan dit uitbreiden door tijdstippen
te gebruiken die verder teruggaan in de tijd. Dit werd voor het eerst voorgesteld door
Bashforth en Adams in 1883 [19]. Dit idee werd verder uitgewerkt door Moulton in 1926
[20]. Beschouw de algemene vorm van een lineaire multistap methode, in de notatie van
ons beginvoorwaardeprobleem (3.1):
mn = α1mn−1 + α2mn−2 + ...+ αkmn−k
+ h(β0τ (mn) + β1τ (mn−1) + β2τ (mn−2) + ...+ βkτ (mn−k)) (3.6)
met constanten α1, α2, ..., αk en β1, β2, ..., βk. De Adams-Bashforth en Adams-Moulton
methodes vormen hier een subklasse van, en kunnen respectievelijke geschreven worden als
mn = mn−1 + h(β1τ (mn−1) + β2τ (mn−2) + ...+ βkτ (mn−k)) (3.7)
en
mn = mn−1 + h(β0τ (mn) + β1τ (mn−1) + β2τ (mn−2) + ...+ βkτ (mn−k)) (3.8)
waarbij de de constanten (β0), β1, β2, ..., βk zodanig gekozen werden dat de hoogst mogelijke
orde van convergentie bereikt wordt. Kiezen we bijvoorbeeld k = 2 voor de Adams-
Bashforth methode, dan moet dit aanleiding geven tot een methode van 2de orde. Voor
een Adams-Moultons methode met k = 2 willen we echter een methode van 3de orde
door de extra coefficient β0. De manier waarop deze constanten berekend worden kan
geraadpleegd worden in [16]. Een overzicht van de coefficienten voor elke orde k wordt
gegeven in tabellen 3.1 en 3.2.
Merk op dat men dus informatie nodig heeft van meerdere tijdstappen terug in de tijd
om de oplossing te vinden. Om de methode te initialiseren, zal het dus nodig zijn om de
eerste paar tijdstappen met een andere methode uit te rekenen die enkel informatie nodig
heeft over de vorige tijdstap. Hiervoor gebruiken we de klassieke Runge-Kutta methode
van orde 4.

3.3 Adams-Bashforth-Moulton methodes 16
Tabel 3.1: Coefficienten voor Adams-Bashforth
k β1 β2 β3 β4 β5 β6 β7
1 1
2 32
−12
3 2312
−43
512
4 5524
−5924
3724
−38
5 1901720
−1387310
10930
−637380
251720
6 42771440
−2641480
4991720
−3649720
959480
−95288
7 19872160480
−186372520
2351832016
−10754965
13571320160
−506232520
1908760480
Tabel 3.2: Coefficienten voor Adams-Moulton
k β0 β1 β2 β3 β4 β5 β6
0 1
1 12
12
2 512
23
−112
3 38
1924
−524
124
4 251720
323360
−1130
53360
−19720
5 95288
14271440
−133240
241720
−1731440
3160
6 1908760480
27132520
−1548720160
586945
−673720160
2632520
−86360480

3.3 Adams-Bashforth-Moulton methodes 17
3.3.1 Predictor-corrector methodes
Uit de vorm van vergelijking (3.6) kan men zien dat de Adams-Bashforth methodes ex-
pliciet zijn, aangezien er geen informatie over de magnetisatie op een volgende tijdstap
vereist is om de volgende tijdstap vinden. Dit is wel het geval voor de klasse van impliciete
Adams-Moulton methodes in Vgl. (3.7).
De Adams methodes worden meestal geımplementeerd in predictor-corrector vorm. Een
voorlopig resultaat wordt eerst uitgerekend met een Adams-Bashforth methode. Dit resul-
taat wordt dan gebruikt om een benadering te maken van de tijdsafgeleide in het nieuwe
punt. Dit resultaat gebruiken we vervolgens in de Adams-Moulton methode. We illustre-
ren dit met een Adams-Bashforth methode met k = 2, en een Adams-Moulton methode
met k = 2. Dit kunnen we symbolisch noteren als ’AB2M3’ 1. Na invullen van de gepaste
coefficienten uit tabellen 3.1 en 3.2 in vergelijkingen (3.6) en (3.7) verkrijgen we:
mn = mn−1 + h
(3
2τ (mn−1)− 1
2τ (mn−2)
)(3.9)
mn = mn−1 + h
(5
12τ (mn) +
2
3τ (mn−1)− 1
12τ (mn−2)
)(3.10)
Analoog kunnen we de ’AB1M2’ methode definieren, met k = 1 voor de Adams-Bashforth
predictor en k = 1 voor de Adams-Moulton corrector. We zien dat de 1ste orde predictor
gelijk is aan de expliciete Euler-methode.
mn = mn−1 + hτ (mn−1) (3.11)
mn = mn−1 + h
(1
2τ (mn) +
1
2τ (mn−1)
)(3.12)
Merk op dat de correctorstap in feite iteratief kan herhaald worden, om mogelijk een betere
oplossing te bekomen. Stel dat p∗ de orde voorstelt van de predictor, p de orde van de
corrector en m het aantal iteraties van de corrector. Zolang p∗ +m >= p, zal de orde van
convergentie van de totale methode gelijk zijn aan p. In de praktijk wordt meestal slechts
1 iteratie gebruikt, aangezien de volledige drijvende functie van de differentiaalvergelijking
(hier het moment τ ) moet berekend worden per iteratie. De stabiliteit van de methode
verbetert echter niet [21].
Voor AB2M3 hebben we p∗ +m = 2 + 1 = 3 = p, wat dus een 3de orde methode oplevert.
Voor AB1M2 hebben we p∗ +m = 1 + 1 = 2 = p, zijnde een 2de orde methode.
1In deze notatie slaan de cijfers dus op de orde van de Adam-Bashforth methodes, niet op de gebruikte
’k’ waarde

3.4 Testen van AB1M2 en AB2M3 18
Een bijkomend voordeel van de methode is dat een zeer intuıtieve voorspelling op de afron-
dingsfout mogelijk is tijdens elke tijdstap. We bespreken dit hier in het kort. In MuMax3 is
het mogelijk om Runge-Kutta methodes te gebruiken met een adaptieve tijdstap. Hiervoor
wordt per tijdstap een oplossing berekend van orde k, en een van orde k + 1. De afron-
dingsfout op de oplossing wordt vervolgens ingeschat door het verschil te nemen van beide
oplossingen. Indien deze fout kleiner is dan een bepaalde tolerantie, dan verhogen we de
tijdstap. Indien de fout groter is, dan verkleinen we de tijdstap. Een gelijkaardige strategie
om de tijdstap aan te passen is dus mogelijk voor de bovenstaande Adams-Bashforth me-
thodes, aangezien de predictor en corrector qua convergentie 1 orde van elkaar verschillen.
3.3.2 De nood aan een semi-impliciete methode
Omdat we in de bovenstaande methode een expliciete methode combineren met een impli-
ciete, wordt een predictor-corrector soms ook een semi-impliciete methode genoemd. We
gebruiken nog steeds een impliciete differentieformule, maar in de input gebruiken we een
schatting van de exacte oplossing met een expliciete methode.
Aan een volledig impliciete methode is een groot nadeel verbonden die betrekking heeft
tot de dimensionaliteit van ons systeem. Bij elke tijdstap moet typisch een matrix A
geınverteerd worden met als dimensies N ×N , waarbij N de dimensie is van de oplossing
[14]. In MuMax3 kunnen maximaal 16 ∗ 106 ruimtelijke cellen gedefinieerd worden. Dit
geeft dus een (16 ∗ 106)× (16 ∗ 106) matrix! Voor bepaalde soorten matrices (bv. ’sparse’
matrices) bestaan er trucs om dergelijke grote matrices toch op een efficiente manier te
kunnen inverteren, maar dit is helaas niet het geval voor ons systeem. Met de predictor-
corrector methode proberen we de voordelen van beide type integratoren te combineren.
We hebben nog steeds de lage geheugenvereisten van een expliciete methode, maar we
maken gebruik van een stabieler integratieschema. Of dit effectief een snellere integratie
inhoudt, moet blijken uit de analyse van een gepaste referentiesimulatie.
3.4 Testen van AB1M2 en AB2M3
3.4.1 Een eerste controle
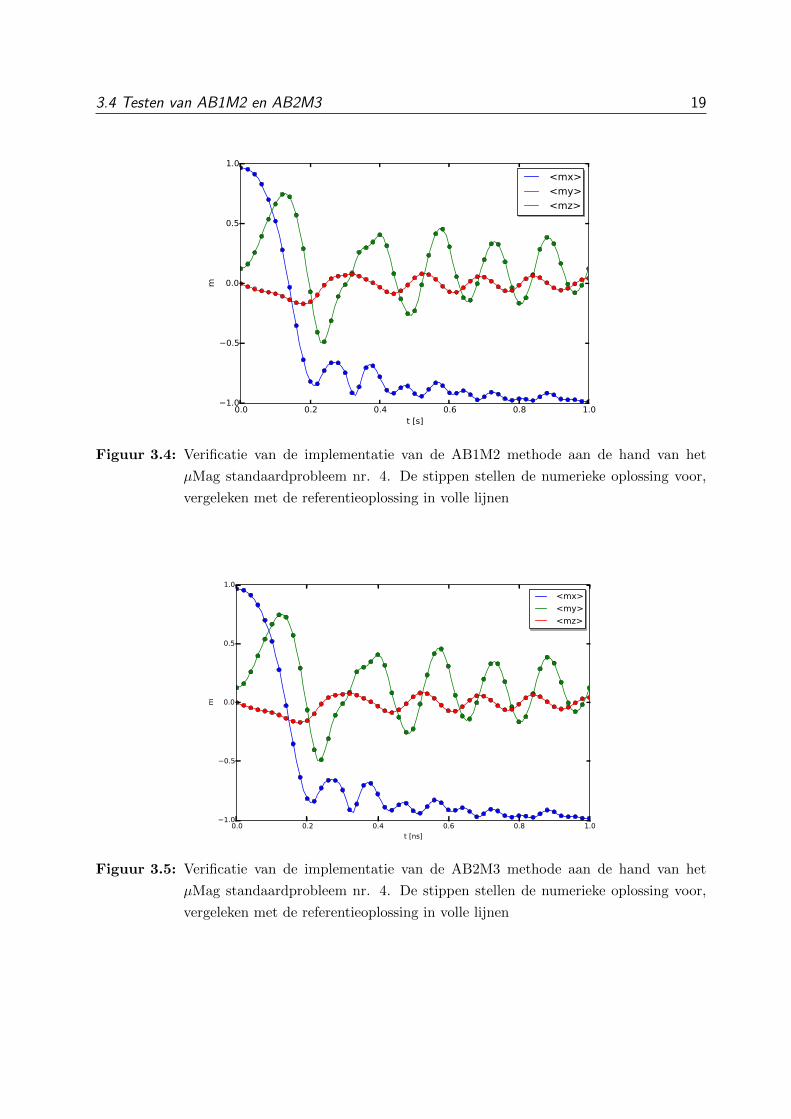
We testen de integratoren AB1M2 en AB2M3 (gedefinieerd in vergelijkingen (3.9) en (3.11))
door de numerieke oplossing te vergelijken met de referentieoplossing van het standaard-
probleem gedefinieerd in Sectie 3.2. Dit levert een goede overeenkomst op.
3.4 Testen van AB1M2 en AB2M3 19
0.0 0.2 0.4 0.6 0.8 1.0t [s]
1.0
0.5
0.0
0.5
1.0
m
<mx><my><mz>
Figuur 3.4: Verificatie van de implementatie van de AB1M2 methode aan de hand van het
µMag standaardprobleem nr. 4. De stippen stellen de numerieke oplossing voor,
vergeleken met de referentieoplossing in volle lijnen
0.0 0.2 0.4 0.6 0.8 1.0t [ns]
1.0
0.5
0.0
0.5
1.0
m
<mx><my><mz>
Figuur 3.5: Verificatie van de implementatie van de AB2M3 methode aan de hand van het
µMag standaardprobleem nr. 4. De stippen stellen de numerieke oplossing voor,
vergeleken met de referentieoplossing in volle lijnen

3.4 Testen van AB1M2 en AB2M3 20
3.4.2 Orde van convergentie
10-14 10-13 10-12 10-11 10-10 10-9
time step (s)
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
abso
lute
err
or a
fter 1
pre
cess
ion
RK1RK12RK23RK45AB1M2
Figuur 3.6: Absolute fout voor een enkele spin die zonder demping precesseert in een extern
veld van 0.1 T, in functie van de gekozen tijdstap voor de beschikbare integratoren
in MuMax3 + de AB1M2 methode
Vervolgens kijken we naar de orde van convergentie van de methode in figuren 3.6 en 3.7.
Dit is een zeer nuttige eigenschap om de implementatie van een integrator te testen, aan-
gezien deze eigenschap zeer gevoelig is aan de kleinste programmeerfouten. We vergelijken
dit ook met de beschikbare methoden in MuMax3 [10]:
• RK45, de Dormand-Prince methode. Deze is 5de orde convergent en heeft een fout-
afschatting van 4de orde. Dit wordt standaard ingesteld voor dynamische simulaties
• RK23, de Bogacki-Shampine methode. heeft een foutafschatting van 2de orde. Deze
wordt gebruikt om de magnetisatie naar zijn grondtoestand te relaxeren.
• RK12, Heun’s methode. Deze is 2de orde convergent en heeft een foutafschatting van
1ste orde. Deze wordt gebruikt voor simulaties met een eindige temperatuur
• RK1, de Euler methode
Er wordt een enkele spin beschouwd, die zonder demping precesseert in een extern veld
van 0.1 T. Aangezien de oplossing hiervan exact gekend is, kan de absolute fout eenvoudig
berekend worden voor een reeks van verschillende tijdstappen. De methodes AB1M2 en
AB2M3 hebben respectievelijk een orde van 2 en 3, zoals verwacht.

3.4 Testen van AB1M2 en AB2M3 21
10-14 10-13 10-12 10-11 10-10 10-9
time step (s)
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
abso
lute
err
or a
fter 1
pre
cess
ion
RK1RK12RK23RK45AB2M3
Figuur 3.7: Absolute fout voor een enkele spin die zonder demping precesseert in een extern
veld van 0.1 T, in functie van de gekozen tijdstap voor de beschikbare integratoren
in MuMax3 + de AB2M3 methode
3.4.3 Performantie
Na het testen van de implementatie van de integratoren volgt de laatste controle, namelijk
het testen van de performantie van de AB2M3 en AB1M2 methodes. We beschouwen
het systeem uit Sectie 3.2.1, waar de onstabiliteit van een expliciete solver geıllustreerd
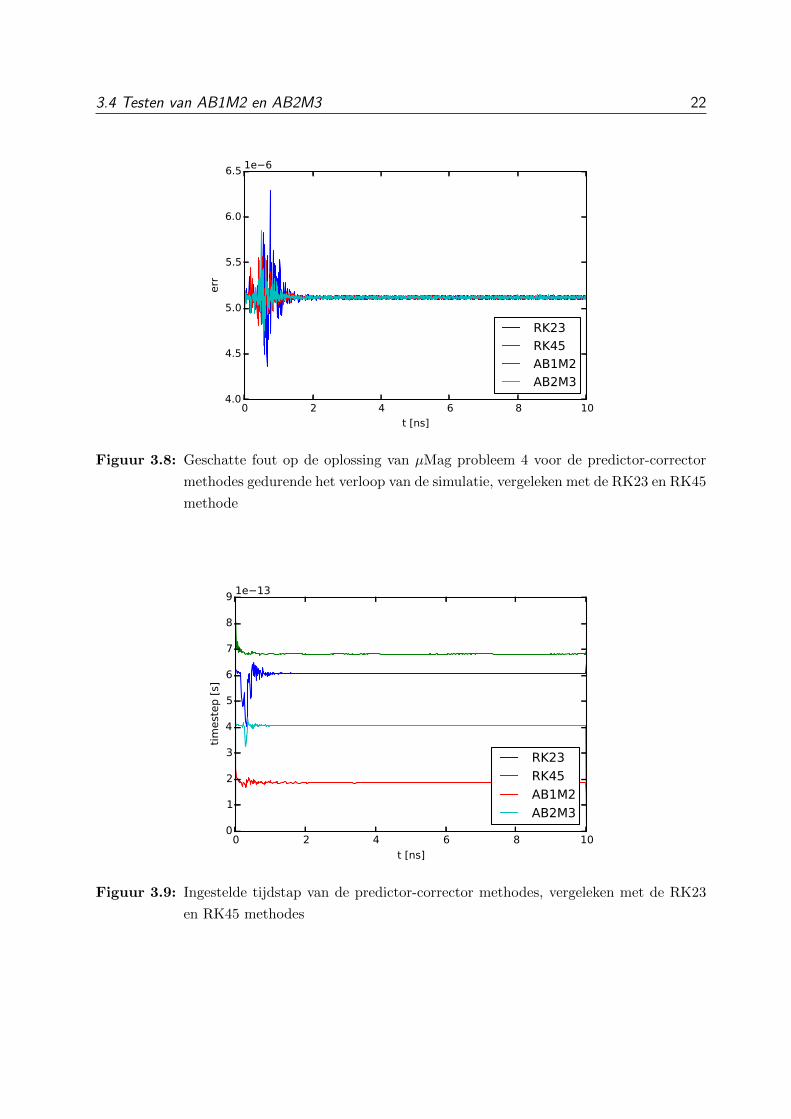
werd. We vergelijken de performantie door dezelfde tolerantie voor de geschatte fout op
de oplossing in te stellen. Deze fout wordt gegeven in Fig. 3.8, waar we als voorbeeld
de vergelijking maken met de RK23 en RK45 methodes. Het verloop van de ingestelde
tijdstappen wordt gegeven in Fig. 3.9. Zo zien we dat onze semi-impliciete methodes toch
een vergelijkbaar kleine tijdstap nodig hebben om dezelfde accuraatheid te bereiken. Dit
uit zich in een vergelijkbare executietijd voor het probleem (zie Fig. 3.10). De AB1M2
methode blijkt hier een zeer trage methode, aangezien het de langste executietijd nodig
heeft. De AB2M3 methode doet het beter, maar blijkt jammer genoeg trager te werken
dan de beschikbare RK45 methode in MuMax3. Dit is vermoedelijk te wijten aan de
ingestelde tijdstapprocedure. Uit Fig. 3.8 blijkt dat de geschatte fout in het statische
regime niet constant blijft, maar nog kleine fluctuaties ondergaat. Dit wil zeggen dat de
predictor term van de ABM methodes regelmatig geıinitialiseerd dient te worden (dus met
de Runge-Kutta methode van orde 4), wat relatief veel rekenkracht vraagt.
3.4 Testen van AB1M2 en AB2M3 22
0 2 4 6 8 10t [ns]
4.0
4.5
5.0
5.5
6.0
6.5
err
1e 6
RK23RK45AB1M2AB2M3
Figuur 3.8: Geschatte fout op de oplossing van µMag probleem 4 voor de predictor-corrector
methodes gedurende het verloop van de simulatie, vergeleken met de RK23 en RK45
methode
0 2 4 6 8 10t [ns]
0
1
2
3
4
5
6
7
8
9
times
tep
[s]
1e 13
RK23RK45AB1M2AB2M3
Figuur 3.9: Ingestelde tijdstap van de predictor-corrector methodes, vergeleken met de RK23
en RK45 methodes

3.4 Testen van AB1M2 en AB2M3 23
AB1M2 Heun RK4 RK23 AB2M3 RK450
5
10
15
20
25
30
35
40
45
exec
utio
n tim
e [s
]
Figuur 3.10: Uitvoeringtijd van de verschillende integratoren voor µMag probleem 4

MODELLEREN VAN EXCHANGE BIAS 24
Hoofdstuk 4
Modelleren van exchange bias
4.1 Het fysisch fenomeen
De uitwisselingsinteracties (Vgl. 2.2) kunnen aanleiding geven tot collectieve magneti-
sche configuraties. In ferromagneten (FM) aligneren naburige, magnetische momenten
zich parallel aan elkaar. In antiferromagneten (AFM) aligneren deze zich in tegengestelde
richting. Beide kunnen pas optreden onder een bepaalde materiaalspecifieke temperatuur,
waarbij de magnetische ordening niet gebroken kan worden door de thermische energie.
Boven deze temperatuur wordt het materiaal paramagnetisch. Bij een FM heet dit de
Curie temperatuur (TC), bij een AFM de Neel temperatuur (TN). Het is ook mogelijk om
deze magnetische configuraties samen te brengen. Men brengt een ferromagnetische dunne
film aan op een antiferromagnetisch substraat (zie Fig. 4.1(a)), waardoor een grenslaag
ontstaat tussen beide. Wanneer materialen met een FM-AFM grenslaag gekoeld worden
doorheen TN van de AFM (met TC groter dan TN), dan wordt een anisotropie (exchange
bias) geınduceerd in de FM [4]. Dit heeft als gevolg een verschuiving van de oorspronkelijke
hysteresislus van de FM, zie Fig. 4.2. Dit wordt een unidirectionele anisotropie genoemd.
Een verhoogde coerciviteit treedt ook vaak op als bijkomend effect.
We geven een intuıtieve verklaring voor dit fenomeen aan de hand van de schematische
weergave in Fig. 4.3. Wanneer bij een temperatuur TN < T < TC een extern veld wordt
aangelegd, aligneren de FM spins zich met dit veld, terwijl de AFM spins willekeurig ge-
orienteerd blijven (i). Bij het koelen tot T < TN , aligneren de AFM spins aan de grenslaag
zich met de FM, waarop de rest van de spins de AFM configuratie vervolledigen (ii). Wan-
neer het extern veld van richting verandert, beginnen de FM spins te draaien. Voor een
voldoende grote anisotropie van de AFM blijven de AFM spins echter op hun plaats (iii).
4.1 Het fysisch fenomeen 25
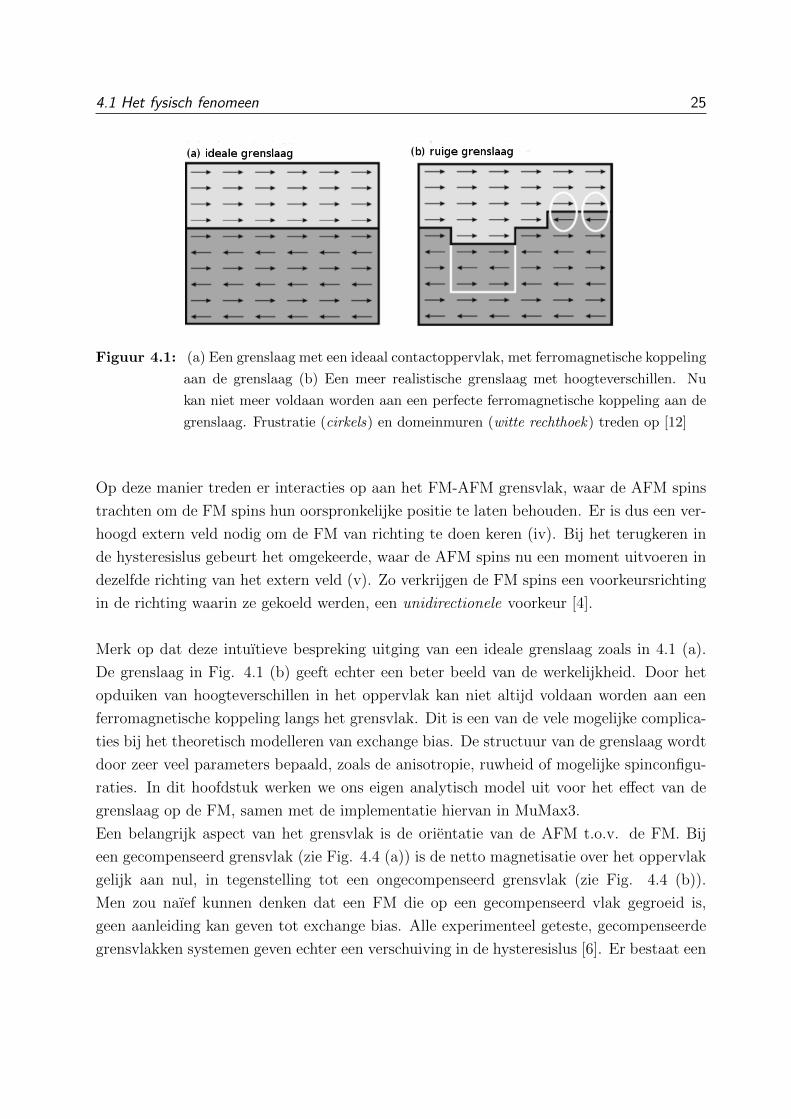
Figuur 4.1: (a) Een grenslaag met een ideaal contactoppervlak, met ferromagnetische koppeling
aan de grenslaag (b) Een meer realistische grenslaag met hoogteverschillen. Nu
kan niet meer voldaan worden aan een perfecte ferromagnetische koppeling aan de
grenslaag. Frustratie (cirkels) en domeinmuren (witte rechthoek) treden op [12]
Op deze manier treden er interacties op aan het FM-AFM grensvlak, waar de AFM spins
trachten om de FM spins hun oorspronkelijke positie te laten behouden. Er is dus een ver-
hoogd extern veld nodig om de FM van richting te doen keren (iv). Bij het terugkeren in
de hysteresislus gebeurt het omgekeerde, waar de AFM spins nu een moment uitvoeren in
dezelfde richting van het extern veld (v). Zo verkrijgen de FM spins een voorkeursrichting
in de richting waarin ze gekoeld werden, een unidirectionele voorkeur [4].
Merk op dat deze intuıtieve bespreking uitging van een ideale grenslaag zoals in 4.1 (a).
De grenslaag in Fig. 4.1 (b) geeft echter een beter beeld van de werkelijkheid. Door het
opduiken van hoogteverschillen in het oppervlak kan niet altijd voldaan worden aan een
ferromagnetische koppeling langs het grensvlak. Dit is een van de vele mogelijke complica-
ties bij het theoretisch modelleren van exchange bias. De structuur van de grenslaag wordt
door zeer veel parameters bepaald, zoals de anisotropie, ruwheid of mogelijke spinconfigu-
raties. In dit hoofdstuk werken we ons eigen analytisch model uit voor het effect van de
grenslaag op de FM, samen met de implementatie hiervan in MuMax3.
Een belangrijk aspect van het grensvlak is de orientatie van de AFM t.o.v. de FM. Bij
een gecompenseerd grensvlak (zie Fig. 4.4 (a)) is de netto magnetisatie over het oppervlak
gelijk aan nul, in tegenstelling tot een ongecompenseerd grensvlak (zie Fig. 4.4 (b)).
Men zou naıef kunnen denken dat een FM die op een gecompenseerd vlak gegroeid is,
geen aanleiding kan geven tot exchange bias. Alle experimenteel geteste, gecompenseerde
grensvlakken systemen geven echter een verschuiving in de hysteresislus [6]. Er bestaat een

4.2 Analytische modellering 26
Figuur 4.2: Belangrijkste gevolgen voor de FM door exchange bias (a) Verschuiving van de
hysteresislus over een veldafstand HE (b) verhoogde coerciviteit HC [5]
hele reeks aan modellen met verschillende verklaringen hiervoor: de vorming van domeinen
in de AFM laag, niet-collineaire koppeling aan het grensvlak, spingolftransfer tussen de
FM en AFM laag, of residuele ongecompenseerde spins aan het grensvlak [4].
4.2 Analytische modellering
Om de FM-AFM koppeling te beschrijven, delen we het grensvlak op in een gecompen-
seerd en een ongecompenseerd deel. Voor beide gevallen werken we het effect op de FM
magnetisatie op dezelfde manier uit:
• stel een energieterm op voor een welbepaalde orientatie van de FM
• vereenvoudig deze term uitgaande van de gepaste fysische aannames
• minimaliseer de bekomen uitdrukking in functie van de AFM orientaties

4.2 Analytische modellering 27
Figuur 4.3: Schematische weergave van spinconfiguratie van een FM-AFM systeem (a) tijdens
verschillende stages (i)-(v) van een exchange bias hysteresislus (b). [4]
Zo bekomen we 2 effectieve anisotropie uitdrukkingen voor de FM, waaraan we elk een
gewichtsfactor kunnen toekennen (bv. 95% gecompenseerde spins, 5% ongecompenseerde
spins). De anisotropie van de AFM (107-108 J/m3) is typisch veel groter dan de FM
anisotropie (bv. ∼ 102 J/m3 voor permalloy) [4]. Uit de intuıtieve beschrijving van het
exchange bias effect uit de vorige sectie is duidelijk dat dit noodzakelijk is om de FM spins
door te AFM spins te laten ’vastpinnen’. We zullen zien dat deze limiet zeer natuurlijk
opduikt als vereenvoudiging voor het exchange bias model.
4.2 Analytische modellering 28
(a) (b)
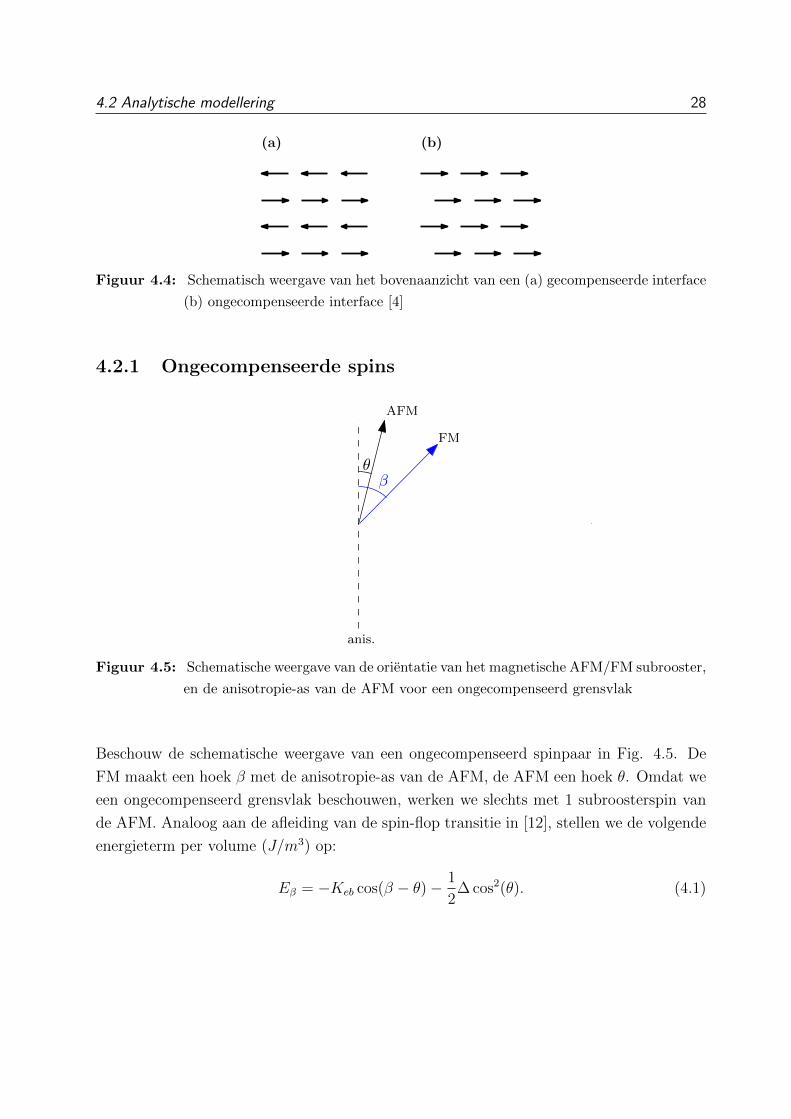
Figuur 4.4: Schematisch weergave van het bovenaanzicht van een (a) gecompenseerde interface
(b) ongecompenseerde interface [4]
4.2.1 Ongecompenseerde spins
θβ
anis.
AFM
FM
Figuur 4.5: Schematische weergave van de orientatie van het magnetische AFM/FM subrooster,
en de anisotropie-as van de AFM voor een ongecompenseerd grensvlak
Beschouw de schematische weergave van een ongecompenseerd spinpaar in Fig. 4.5. De
FM maakt een hoek β met de anisotropie-as van de AFM, de AFM een hoek θ. Omdat we
een ongecompenseerd grensvlak beschouwen, werken we slechts met 1 subroosterspin van
de AFM. Analoog aan de afleiding van de spin-flop transitie in [12], stellen we de volgende
energieterm per volume (J/m3) op:
Eβ = −Keb cos(β − θ)− 1
2∆ cos2(θ). (4.1)

4.2 Analytische modellering 29
Hier representeert de exchange interactieconstante Keb (J/m3) de grootte van de koppeling
tussen de FM en AFM spins 1. De eerste term zorgt er dus voor dat beide spins gealigneerd
willen blijven. ∆ (J/m3) representeert de anisotropiesterkte van de AFM. De tweede term
zorgt er dus voor dat de AFM zich orienteert volgens zijn uniaxiale anisotropie-as. Door
de sterke AFM anisotropie kunnen we uitgaan van een zeer kleine hoek θ en de volgende
benaderingen invoeren:
cos(β − θ) ≈ cos β + θ sin β (4.2)
cos2 θ ≈ 1− θ2 (4.3)
Dit geeft
Eβ = −Keb cos β −Kebθ sin β − 1
2∆(1− θ2). (4.4)
Minimaliseer naar θ:
∂Eβ∂θ
= −Keb sin β + ∆θ = 0 (4.5)
⇒ θ =Keb sin β
∆(4.6)
Uit de 2de afgeleide van de energie naar de hoek θ zien we dat we te maken hebben met
een energieminimum. We krijgen:
Eβ,min = −Keb cos β − K2eb
2∆sin2 β − ∆
2+K2eb
2∆2sin2 β (4.7)
Omdat we te maken hebben met een energieterm, laten we de constante ∆2
vallen. Omdat
∆ zeer groot is t.o.v. Keb, kiezen we er voor om de laatste term te verwaarlozen. We
herschrijven de sin2 β term ook naar een cos2 β term. De uiteindelijke uitdrukking wordt
dan
Eβ,min = −Keb cos β +K2eb
2∆cos2 β (4.8)
Dit is niks anders dan een Zeemanterm met de exchange bias constante als prefactor, en
een perpendiculaire koppeling als een corrigerende factor (de ∆ in de noemer maakt hier
een kleine term van).
1In MuMax3 wordt de interface constante Jeb (J/m2) opgevraagd i.p.v. Keb (J/m3). Dit is gewoon
dezelfde waarde × de dikte van de FM, waardoor we een energie hebben per oppervlakte

4.2 Analytische modellering 30
4.2.2 Gecompenseerde spins
θβ
anis.
AFM
FM
φ
AFM
Figuur 4.6: Schematische weergave van de orientatie van het magnetische AFM/FM subrooster,
en de anisotropie-as van de AFM voor een gecompenseerd grensvlak
De afleiding voor gecompenseerde spins (Fig. 4.6) verloopt zeer gelijkaardig. In dit geval
beschouwen we beide subroosterspins van de AFM. De FM maakt een hoek β met de
anisotropie-as van de AFM, de AFM maakt de hoeken θ en φ. De energieterm wordt
Eβ = −Keb cos(β − θ) +Keb cos(β + φ) (4.9)
+1
2∆(cos2(θ) + cos2(φ))− AM2 cos(θ + φ). (4.10)
De betekenis van de eerste 3 termen is weer hetzelfde als in Vgl. (4.1), maar nu voor 2
AFM spins in plaats van 1. Deze willen zich richten volgens de spin van de FM, maar
willen ook in de richting van de anisotropie-as liggen. We hebben ook een nieuwe term
met als parameters A (J/A2m) en M (A/m), zijnde de uitwisselingsconstante van de AFM
en de subroostermagnetisatie van de AFM. Deze representeert de neiging van 2 naburige
AFM spins om zich in tegengestelde richting te orienteren. We voeren opnieuw een kleine-
hoekbenadering in op de AFM door de sterke AFM anisotropie. Voor θ en φ hebben we

4.2 Analytische modellering 31
de approximaties
cos(β − θ) ≈ cos β + θ sin β (4.11)
cos(β + φ) ≈ cos β − φ sin β (4.12)
cos(θ + φ) ≈ 1− (θ + φ)2
2(4.13)
cos2(θ) ≈ 1− θ2, cos2(φ) ≈ 1− φ2 (4.14)
Dit geeft
Eβ = −Keb(θ + φ) sin β − AM2(1− θ2 + 2θφ+ φ2
2)− 1
2∆(2− φ2 − θ2) (4.15)
Minimaliseer naar θ en φ:∂Eβ
∂θ= −Keb sin β + AM2(θ + φ) + ∆θ
∂Eβ
∂φ= −Keb sin β + AM2(φ+ θ) + ∆φ
(4.16)
⇒
θ =
−AM2φ+Keb sin βAM2 + ∆
φ =−AM2θ +Keb sin β
AM2 + ∆
(4.17)
Uit de 2de afgeleide naar de hoeken θ en φ zien we opnieuw dat we te maken hebben met
een energieminimum. We zien dus dat θ = φ, en we krijgen
θ, φ =Keb
∆ + 2AM2sin β (4.18)
Invullen in Vgl. (4.15) geeft
Eβ,min =−2K2
eb
∆ + 2AM2sin2 β − AM2(1− 2(
Keb
∆ + 2AM2)2 sin2 β) (4.19)
−∆(1− (Keb
∆ + 2AM2)2 sin2 β) (4.20)
=
[K2eb
∆ + 2AM2
(∆ + 2AM2
∆ + 2AM2− 2
)]sin2 β − AM2 −∆ (4.21)
We herschrijven de sin2 β term naar een cos2 β term, en laten de constante termen opnieuw
vallen. Zo bekomen we
Eβ,min =K2eb
∆ + 2AM2cos2 β (4.22)
De gecompenseerde spins induceren dus een perpendiculaire koppeling op de FM.

4.2 Analytische modellering 32
We merken ook een interessant verband op tussen dit resultaat en de perpendiculaire term
uit Vgl. (4.8). Indien de uitwisselingsconstante A → 0, dan wordt dit dezelfde term ×een factor 2. Dit komt omdat we in deze limiet in feite gewoon 2 ongecompenseerde spins
beschouwen waarvan de Zeemantermen elkaar exact opheffen, maar die elk een bijdrage
leveren tot dezelfde uniaxiale anisotropie.
4.2.3 Consistentie van de kleine-hoekbenadering
De opmerkzame lezer zal bij de hoekapproximaties (4.11) tot (4.14) wellicht een kleine
inconsistentie hebben vastgesteld. Hierin gebruiken we een 1ste orde benadering voor de
uitdrukkingen (4.11) en (4.12), maar gaan we tot 2de orde in (4.13) en (4.14).2 We laten
hier in het kort zien wat het gevolg is van de volledige set 2de orde approximaties
cos(β − θ) ≈ (1− θ2
2) cos β + θ sin β (4.23)
cos(β + φ) ≈ (1− φ2
2) cos β − φ sin β (4.24)
cos(θ + φ) ≈ 1− (θ + φ)2
2(4.25)
cos2(θ) ≈ 1− θ2, cos2(φ) ≈ 1− φ2. (4.26)
De energie (4.9) wordt nu
Eβ = −Keb(θ + φ) sin β +Keb(θ2 − φ2
2) cos β (4.27)
− AM2(1− θ2 + 2θφ+ φ2
2)− 1
2∆(2− φ2 − θ2) (4.28)
Minimaliseren naar θ en φ geeft de hoekenθ =
Keb sin β + 2AM2φKeb cos β + AM2 + ∆
φ =Keb sin β + 2AM2θ−Keb cos β + AM2 + ∆
(4.29)
Vergeleken met (4.17), zien we dus dat een extra term Keb cos β is opgedoken in de noemer.
Deze breekt de symmetrie van de AFM spins, want de hoeken θ en φ zijn niet meer hetzelfde.
Dit zouden we intuıtief verwachten uit (4.6), waar de FM spin de symmetrie breekt. Het
effect van de term Keb cos β is echter verwaarloosbaar, omdat de anisotropieterm ∆ ook
2Deze inconsistentie treedt ook op voor de ongecompenseerde spin in (4.2), maar een volledige 2de
orde benadering geeft gewoon aanleiding tot een extra term van hogere orde in (4.7) die kan verwaarloosd
worden

4.3 Toepassingen van het model 33
opduikt in dezelfde noemer en relatief zeer groot is zoals eerder aangenomen. Om een
nodeloos complexe uitdrukking voor de energie te vermijden, werken we dus toch verder
met Vgl. (4.22).
4.3 Toepassingen van het model
4.3.1 Exchange bias in een volledig metallisch systeem
(a) beginconfi-
guratie
(b) na saturatie
in positieve
richting
(c) na saturatie
in negatieve
richting
(d) opnieuw sa-
turatie in po-
sitieve rich-
ting
Figuur 4.7: Spatiale evolutie van de permalloy laag onder invloed van een extern veld
De anisotropieen (4.8) en (4.22) werden geımplementeerd in MuMax3 (zie Bijlage A). Om
dit te testen, modelleren we het experimenteel opgemeten exchange bias systeem uit [22],
een Ni80Fe20 (permalloy) FM laag gegroeid op een Fe50Mn50 AFM met Molecular Beam
Epitaxy (MBE). We kiezen voor een epitaxiaal gegroeid systeem zodat we geen rekening
moeten houden met een polykristallijne grenslaag. Permalloy heeft een saturatiemagneti-
satie Ms = 8.276 × 105 A/m, en een uitwisselingconstante Aex = 1.3 × 10−11 J/m 3 [24].
De permalloy laag is 7 nm dik, en we stellen de laterale dimensies in als 64 nm op 64 nm,
met als celgrootte 3.125 nm × 3.125 nm × 7 nm. De FM raakt de AFM langs het (111)-
oppervlak van de AFM, wat een ongecompenseerd raakvlak geeft. Er wordt een extern
veld van ∼ 200 kA/m aangelegd. De magnetisatie van de laag doorheen een hysteresislus
wordt gegeven in fig. 4.7.
3Merk op dat Aex niet gelijk is aan A in (4.22). Micromagnetisch zit de afhankelijkheid magnetisatie
voor de exchange energie ook vervat in Aex. In ons analytisch model trekken we deze uit elkaar. Het
verband wordt gegeven door A = 6/(Md)2Aex, waarbij d gelijk is aan de roosterconstante van het materiaal

4.3 Toepassingen van het model 34
In fig. 4.8 wordt de verschoven hysteresislus van de permalloylaag geplot. Experimenteel
werd een exchange bias veld Heb opgemeten van 15 kA/m. Om deze waarde te repro-
duceren, werd een bijdrage van 10.5% aan ongecompenseerde spins ingesteld (dus 89.5%
gecompenseerde spins). Deze grootteorde voor de relatieve bijdrage aan ongecompenseerde
spins verwachten we volgens [24]. Het effect van de uniaxiale anisotropie geınduceerd door
de AFM 4.22 is zeer minimaal. We verifieren dit in fig. 4.9, waar het effect van enkel deze
term wordt weergegegeven. Dit heeft amper een effect, omdat de anisotropie-as in dezelfde
richting ligt als het externe veld. Om het effect van de anistropieterm te bekijken, moe-
ten we het extern veld aanleggen loodrecht op de ingestelde veldkoelrichting voor exchange
bias. Het resultaat wordt gegeven in 4.10. Hier is de term wel verhoogd met een factor 100,
omdat het effect van deze anistropie zeer klein blijkt te zijn voor deze materiaalparameters.
Op deze manier wordt een verhoogde coerciviteit opgemeten in de FM.
200 100 0 100 200Hext [kA/m]
1.0
0.5
0.0
0.5
1.0
mx Heb=15 [kA/m]
zonder EBmet EB
Figuur 4.8: Verschuiving van hystersislus van een bilaag uit Ni80Fe20/Fe50Mn50 onder invloed
van exchange bias, met het extern veld aangelegd langs de anisotropierichting van
de AFM

4.3 Toepassingen van het model 35
200 100 0 100 200Hext [kA/m]
1.0
0.5
0.0
0.5
1.0
mx
zonder EBzonder EB, met anis.
Figuur 4.9: Hysteresislus van een bilaag uit Ni80Fe20/Fe50Mn50, met het extern veld aangelegd
langs de anisotropierichting van de AFM. Enkel de uniaxiale anisotropie van de
exchange bias anisotropie heeft een invloed, corresponderend met een laag perfect
gecompenseerde spins
200 100 0 100 200Hext [kA/m]
1.0
0.5
0.0
0.5
1.0
mx
zonder EBzonder EB, met anis. x100
Figuur 4.10: Hysteresislus van een bilaag uit Ni80Fe20/Fe50Mn50, met het extern veld loodrecht
aangelegd op de anisotropierichting van de AFM. Enkel de uniaxiale anisotropie-
term van de exchange bias anisotropie wordt ingeschakeld × een factor 100

4.3 Toepassingen van het model 36
4.3.2 Exchange bias in complexe oxides
Figuur 4.11: Schematische weergave van de collineaire spinstructuur in een LFO/LSMO nano-
magneet, en een doorsnede van de structuur [25]
Magnetisme kan ook optreden in oxides met een perovskiet kristalstructuur. We beschou-
wen nanomagneten vervaardigd uit La0.7Sr0.3MnO3 (LSMO) en LaFeO3 (LFO), experimen-
teel gerealiseerd door E. Folven et al. in [25]. Er worden 2 systemen beschouwd, allebei
met een rechthoekige geometrie van 500 nm op 2 µm. Het eerste is 100 eenheidscellen dik,
en bestaat enkel uit de FM LSMO. Het tweede is een AFM/FM bilagensysteem bestaande
uit 10 eenheidscellen LFO en 90 eenheidscellen LSMO. De films werden epitaxiaal gegroeid
door pulsed laser deposition op een Nb-gedopeerd, (001)-georienteerd SrTiO3 substraat
(zie Fig. 4.11). De magnetisaties werden opgemeten met X-ray linear/circular dichroısm
(XMLD/XMCD) in combinatie met photoemission electron microscopy (PEEM).
Het ideaal (001)-oppervlak van een G-type antiferromagneet zoals LFO is magnetisch vol-
ledig gecompenseerd. De ruwheid van dit epitaxiaal gegroeid systeem werd ook opgemeten,
en is kleiner dan een monolaag LFO/LSMO. Hierdoor verwachten we enkel het effect van
de loodrechte koppeling uit Vgl. (4.22) voor het bilagensysteem. Uit metingen blijkt echter
dat de AFM Neel vector georienteerd ligt volgens de lange as van de rechthoek (zie Fig.
4.11). Dit wordt door Folven et al. verklaard door het feit dat de vormanisotropie van de
rechthoek sterk genoeg is om de loodrechte koppeling van de FM/AFM grenslaag te over-
bruggen. Deze 2 preferentiele richtingen voor de magnetisatie worden getekend in Fig. 4.12.
Het schakelgedrag van de LSMO en LFO/LSMO nanostructuren werd systematisch on-
derzocht door een magnetisch veld aan te leggen van 0 tot 190 Oe op een ensemble van
dergelijke magneten. Dit veld werd aangelegd in 2 verschillende richtingen: volgens de
lange as van de rechthoek, en volgens een richting 45 graden t.o.v. van deze as in het vlak
4.3 Toepassingen van het model 37
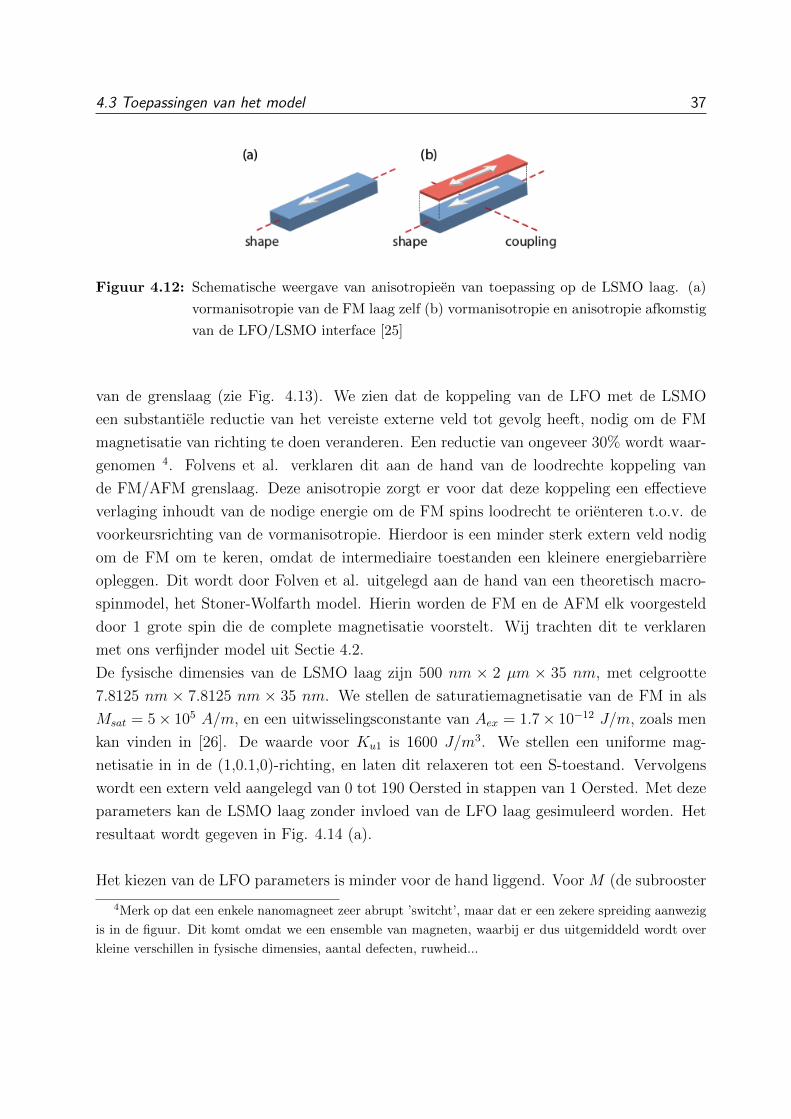
Figuur 4.12: Schematische weergave van anisotropieen van toepassing op de LSMO laag. (a)
vormanisotropie van de FM laag zelf (b) vormanisotropie en anisotropie afkomstig
van de LFO/LSMO interface [25]
van de grenslaag (zie Fig. 4.13). We zien dat de koppeling van de LFO met de LSMO
een substantiele reductie van het vereiste externe veld tot gevolg heeft, nodig om de FM
magnetisatie van richting te doen veranderen. Een reductie van ongeveer 30% wordt waar-
genomen 4. Folvens et al. verklaren dit aan de hand van de loodrechte koppeling van
de FM/AFM grenslaag. Deze anisotropie zorgt er voor dat deze koppeling een effectieve
verlaging inhoudt van de nodige energie om de FM spins loodrecht te orienteren t.o.v. de
voorkeursrichting van de vormanisotropie. Hierdoor is een minder sterk extern veld nodig
om de FM om te keren, omdat de intermediaire toestanden een kleinere energiebarriere
opleggen. Dit wordt door Folven et al. uitgelegd aan de hand van een theoretisch macro-
spinmodel, het Stoner-Wolfarth model. Hierin worden de FM en de AFM elk voorgesteld
door 1 grote spin die de complete magnetisatie voorstelt. Wij trachten dit te verklaren
met ons verfijnder model uit Sectie 4.2.
De fysische dimensies van de LSMO laag zijn 500 nm × 2 µm × 35 nm, met celgrootte
7.8125 nm × 7.8125 nm × 35 nm. We stellen de saturatiemagnetisatie van de FM in als
Msat = 5× 105 A/m, en een uitwisselingsconstante van Aex = 1.7× 10−12 J/m, zoals men
kan vinden in [26]. De waarde voor Ku1 is 1600 J/m3. We stellen een uniforme mag-
netisatie in in de (1,0.1,0)-richting, en laten dit relaxeren tot een S-toestand. Vervolgens
wordt een extern veld aangelegd van 0 tot 190 Oersted in stappen van 1 Oersted. Met deze
parameters kan de LSMO laag zonder invloed van de LFO laag gesimuleerd worden. Het
resultaat wordt gegeven in Fig. 4.14 (a).
Het kiezen van de LFO parameters is minder voor de hand liggend. Voor M (de subrooster
4Merk op dat een enkele nanomagneet zeer abrupt ’switcht’, maar dat er een zekere spreiding aanwezig
is in de figuur. Dit komt omdat we een ensemble van magneten, waarbij er dus uitgemiddeld wordt over
kleine verschillen in fysische dimensies, aantal defecten, ruwheid...

4.3 Toepassingen van het model 38
Figuur 4.13: Percentage van de omgeschakelde nanomagneten in het opgemeten ensemble in
functie van het extern magnetisch veld voor de LSMO laag, en de LFO/LSMO
lagen. In volle lijnen worden numerieke fits gegeven voor het theoretisch model
aangenomen door Folven et al. [25]
magnetisatie van de AFM), Aex en Ku1 zijn geen deugdelijke experimentele waarden voor-
handen. Hiervoor gebruiken we intuıtieve argumenten zoals vooropgesteld door E. Folven
na een korte briefwisseling:
• M : uit de elektronische structuur van Fe in LFO (d5-orbitaal), en Mn in LSMO
(mix van d3- en d4-orbitalen) vinden we een moment van ongeveer 3.3 µB (Bohr-
magneton) voor Mn in LSMO en 4 µB in LFO. Hieruit kan beargumenteerd worden
dat M ongeveer 20% groter dient te zijn voor LFO dan voor de Msat van LSMO
• Aex: met behulp van densiteit functionaal theorie kan de vrije energie van LSMO
in een FM configuratie vergeleken worden met LSMO geforceerd in een AFM confi-
guratie. Hetzelfde kan gedaan worden voor LFO. Hieruit blijkt dat het verschil iets
groter is dan in het geval van LFO. Als 1ste orde approximatie kunnen we hieruit
besluiten dan A groter moet zijn voor LFO dan voor LFMO, en uit de verschillen in
vrije energie zou dit minder moeten zijn dan een factor 2.
• Ku1: aangezien de atomaire structuren van LFO en LSMO erg op elkaar lijken, wordt
voor LFO dezelfde anisotropieconstante gebruikt

4.3 Toepassingen van het model 39
(a) LFO (b) LFO/LSMO (c) LFO/LSMO
+ biax. anis.
Figuur 4.14: Spatiale evolutie van de LFO laag onder invloed van een toenemend extern mag-
netisch veld (wijst naar rechts) tot 90 Oe voor een interface constante Jeb =
3.5× 10−5 J/m2
Concreet stellen we dus in: Msat = 5× 105 A/m, Aex = 3× 105 J/m en Ku1 = 1600 J/m3.
De parameter die nog ontbreekt in Vgl. (4.22), is dus de interface constante Jeb. Met
behulp van onze simulatie proberen we deze waarde te benaderen. Omdat we een reductie
van 30% op het ’switching’ veld verwachten, kijken we bij welke Jeb deze reductie optreedt.
Het resultaat wordt gegeven in Fig. 4.14. De LFO laag (a) switcht bij 70 Oe. De nodige
waarde voor de interface constante is Jeb = 3.5 × 10−5 J/m2. Zoals besproken in [25],
keert de magnetisatie inderdaad minder abrupt om, omdat er intermediaire toestanden
beschikbaar zijn met een lagere energie. Als extra controle kijken we ook naar de invloed
van de biaxiale anisotropie van de FM in de (1,1,0)- en (1,-1,0)-richtingen in (c) van Fig.
4.14. Zoals verwacht in [25], heeft dit geen wezenlijke invloed op het switching gedrag. In-
teressant is dat de intermediaire toestanden nu wel gespiegeld zijn in de verticale richting.
Belangrijk om op te merken is dat de FM laag volgens de simulaties in het algemeen onge-
veer een factor 2 vroeger switcht dan opgemeten volgens Fig. [25]. De FM nanomagneten

4.3 Toepassingen van het model 40
switchen in een veld van 100 Oe tot 200 Oe, terwijl onze gesimuleerde nanomagneet al om-
keert bij 70 Oe. Een voor de hand liggende verklaring hiervoor is er niet. Hoewel we dus
een relatieve reductie van 30% kunnen reproduceren voor het switching veld met behulp
van een verfijnder mechanisme dan voorgesteld door Folven et al., kan dit er op wijzen dat
we een belangrijk element missen in de simulatie.
De gevonden waarde voor Jeb dient ook kritisch beschouwd te worden. We steunen op Vgl.
(4.22), die gevoelig is aan de anisotropie van de AFM LSMO (parameter ∆, is gelijk aan
Ku1). Hiervoor hebben we echter geen experimenteel opgemeten waarde gebruikt, maar
op intuıtieve gronden gepostuleerd dat deze gelijk is aan de waarde van de FM LFO. Een
grote verbetering in deze analyse zou dus zijn om een betere waarde te vinden voor Ku1,
gebaseerd op experimenten of ab initio simulaties.
4.3.3 Illustratie van exchange bias met AFM gebieden met ver-
schillende orientaties
(a) FM LSMO (b) FM LSMO
met invloed
van AFM LFO
(c) Anisotropie-
richtingen van
de AFM LFO
korrels
(d) Variaties in
Ku1 van de
AFM LFO
korrels
Figuur 4.15: Illustratie van de invloed van een polykristallijne laag AFM LSMO op de LFO
laag
Tot nu toe werden enkel simulaties uigevoerd met AFM lagen die slechts 1 anisotropie-
richting hebben, maar er kunnen ook meerdere voorkeursrichtingen aanwezig zijn. Een
voorbeeld hiervan kan gevonden worden in [26]. De AFM gebieden kunnen ook variaties
vertonen in de sterkte van de koppeling met de FM. Met deze zaken werd rekening ge-
houden in onze implementatie, geıllustreerd in Fig. 4.15. We baseren ons op de reeds
aangeboden functionaliteit in MuMax3 om via Voronoitesselatie meerdere gebieden in de

4.3 Toepassingen van het model 41
laag te definieren met verschillende materiaalparameters, beschreven in [27]. We simule-
ren opnieuw de materialen FM LSMO en AFM LFO, met dezelfde materiaalparameters
als in Sectie 4.3.2, uitgezonderd de interface constante Jeb. Hier hebben we een waarde
van Jeb = 10.5 × 10−5 J/m2 gebruikt, 3 maal groter dan de eerder bekomen waarde. We
hebben dit eenvoudig gekozen om het effect van de AFM beter te kunnen waarnemen.
Gebaseerd op de geometrie van de micromagneten in [26], stellen we de dimensies in als
2 µm×2 µm×35 nm. De celgrootte is 7.815 nm×7.815 nm×35 nm. We laten de anisotro-
pierichting van de AFM laag willekeurig varieren tussen de (1,0,0) en de (0,0,1)-richting.
We simuleren dus een AFM met viertallige anisotropie. In (a) van Fig. 4.15 wordt de
magnetisatie gegeven van de FM LSMO laag zonder invloed van de AFM, een gesloten do-
meinstructuur. In (c) en (d) worden de anisotropierichtingen gegeven van de AFM korrels,
en de variaties in de anisotropieconstane Ku1. De richtingen werden compleet willekeurig
gekozen, en de Ku1 wijken willekeurig tot 10% af van de gemiddelde waarde 1600 J/m3.
De veldkoelrichting werd ingesteld in de (1,0,0)-richting, en er wordt uitgegaan van 90%
gecompenseerde spins. Voor de FM LSMO heeft dit de magnetisatie in (b) tot gevolg. We
bemerken ’stroomachtige’ storingen op die zich naar het centrum van de structuur lijken te
richten, waarbij de globale vortexstructuur nog steeds aanwezig is. Ook zijn de domeinen
in de y-richtingen gegroeid ten koste van de domeinen in de x-richtingen.

BESLUIT 42
Hoofdstuk 5
Besluit
In hoofdstuk 3 hebben we gezocht naar een alternatief voor de expliciete numerieke me-
thodes gebruikt in MuMax3 om de Landau-Lifshitz vergelijking te integreren. Door de
’stijfheid’ van deze differentiaalvergelijking, worden expliciete methodes gedwongen om
zeer kleine tijdstappen te gebruiken, zelfs als er dynamisch gezien weinig lijkt veranderen.
Deze methodes vormen echter een lage belasting op het geheugen van de computer, wat
een zeer gewenste eigenschap is voor GPU-simulaties. Dit in sterk contrast met impliciete
methodes, die ook voor stijve systemen een grote tijdstap kunnen aannemen, maar die het
geheugen (in het algemeen) zwaar belasten. We hebben geprobeerd om de voordelen van
beide methodes te combineren door Adams-Bashforth methodes (AB1M2 en AB2M3) te
gebruiken, een subklasse van de semi-impliciete predictor-corrector methodes. Om de per-
formantie te testen gebruikten we µMag standaardprobleem nr. 4 als benchmark. Helaas
bleek de snelste methode (AB2M3) nog steeds trager te werken dan de meest snelle be-
schikbare integrator (RK45). Dit is vermoedelijk te wijten aan het feit dat de integrator te
vaak een nieuwe tijdstap moet instellen, waardoor de methode telkens moet geınitialiseerd
worden, wat een relatief grote kost met zich meebrengt.
In hoofdstuk 4 hebben we gekeken naar het exchange bias effect, een gevolg van de inter-
actie van een laag ferromagnetisch materiaal met een antiferromagneet. Dit effect heeft
een verschuiving van de hysteresislus van de feromagneet tot gevolg, waarbij een verhoogde
coerciviteit ook courant optreedt. We hebben een analytisch model opgesteld om interacties
in de FM/AFM grenslaag te modelleren, waarbij een duidelijk onderscheid werd gemaakt
tussen gecompenseerde en ongecompenseerde spins. De effecten voor ongecompenseerde
AFM spins zijn een unidirectionele en een uniaxiale anisotropie. Voor gecompenseerde
spins krijgen we enkel een uniaxiale anisotropie. Dit model hebben we toegepast op ver-

BESLUIT 43
schillende systemen. Voor een volledig metallisch systeem (Ni80Fe20/Fe50Mn50) hebben
we het experimenteel veld Heb kunnen reproduceren door een verhouding van 89.5% ge-
compenseerde spins, en 10.5% ongecompenseerde spins in te stellen. Voor een interface
bestaande uit perovskietoxides (LFO/LSMO), werd experimenteel waargenomen dat de
geınduceerde uniaxiale anisotropie van de grenslaag aanleiding gaf tot een verlaging van
het vereist, magnetisch veld om een rechthoekige, nanomagnetische LFO-ferromagneet van
globale, magnetische orientatie te doen omkeren. Deze relatieve verlaging van 30% kon
gereproduceerd worden voor een Jeb = 3.5 × 10−5 J/m2. De absolute grootte van de vel-
den was echter ongeveer 2 maal te klein, wat kan wijzen op een ontbrekend element in de
simulatie. We hebben ook geıllustreerd dat een AFM met meerdere anisotropieorientaties
gesimuleerd kan worden voor een gelijkaardig LFO/LSMO bilagensysteem.
BRONCODE IN MUMAX3 44
Bijlage A
Broncode in MuMax3
In deze thesis werd altijd gewerkt met MuMax versie 3.9c. De besproken aanpassingen in
deze bijlage zijn dus van toepassing op deze specifieke release van de broncode.
A.1 Adams-Bashforth methodes
Deze methodes werden geımplementeerd naast de bestaande methodes in /mumax/3/engine/run.go.
A.1.1 AB1M2
package engine
import ("fmt""math""github.com/mumax/3/cuda""github.com/mumax/3/data""github.com/mumax/3/util"
)
type Ab1m2 struct {dy_old *data.Slice
}
func (s *Ab1m2) Step() {t0 := Timey := M.Buffer()
//copy for iteration loopy_copy := cuda.Buffer(VECTOR, y.Size())defer cuda.Recycle(y_copy)data.Copy(y_copy, y)
//torque used in ’iteration’dy_iter := cuda.Buffer(VECTOR, y.Size())defer cuda.Recycle(dy_iter)

A.1 Adams-Bashforth methodes 45
//dy1 is previous torqueif s.dy_old == nil {
s.dy_old = cuda.Buffer(VECTOR, y.Size())}dy_old := s.dy_old
dy_copy:= cuda.Buffer(VECTOR, y.Size())defer cuda.Recycle(dy_copy)data.Copy(dy_copy, dy_old)
dt := float32(Dt_si * GammaLL)//util.AssertMsg(dt > 0, "Backward Euler solver requires fixed time
step > 0")
//predictor: euler step// with temperature, previous torque cannot be used as predictorcuda.Madd2(y, y_copy, dy_old, 1, dt) // predictor euler step with
previous torqueM.normalize()
//corrector: trapezoidal rule//iterate (now 1 iteration, can be changed, but use const in that
case)for i := 0; i < 1; i++ {
//data.Copy(dy_iter_copy,dy_iter)torqueFn(dy_iter)cuda.Madd3(y, y_copy, dy_old, dy_iter, 1, (1./2.)*dt,
(1./2.)*dt) //corrector trapezoidal stepM.normalize()}
//evaluate steptorqueFn(dy_old)
err := cuda.MaxVecDiff(dy_old,dy_iter) * float64(dt)
// adjust next time stepif err < MaxErr || Dt_si <= MinDt || FixDt != 0{ // mindt check to
avoid infinite loopNSteps++Time = t0 + Dt_siadaptDt(math.Pow((1./2.)*MaxErr/err, 1./2.))setLastErr(err)setMaxTorque(dy_old)
} else {// undo bad stepfmt.Println("Bad step at t=", t0, ", err=", err)util.Assert(FixDt == 0)Time = t0data.Copy(y, y_copy)data.Copy(dy_old, dy_copy)NUndone++adaptDt(math.Pow((1./2.)*MaxErr/err, 1./3.))
}}
func (s *Ab1m2) Free() {s.dy_old.Free()s.dy_old = nil
}
A.1.2 AB2M3

A.1 Adams-Bashforth methodes 46
package engine
import ("fmt""math""github.com/mumax/3/cuda""github.com/mumax/3/data""github.com/mumax/3/util"
)
type Ab2m2 struct {}
func (s *Ab2m2) Step() {t0 := Timey := M.Buffer()size := y.Size()
//copy for transition to rk4y0 := cuda.Buffer(VECTOR, y.Size())defer cuda.Recycle(y0)data.Copy(y0, y)
if FixDt != 0 {Dt_si = FixDt
}
h := float32(Dt_si * GammaLL) // internal time step = Dt * gammaLL
//If the solver gets called for the first time://compute the first 2 magnetizations and torques with RK4//1 ’step’ is in fact 2 timestepsif RK4_run {
//old magnetizations needed for multistep method, stored asglobals in run.go
if !AB2M3_init {y_0, y_1 = cuda.Buffer(3, size), cuda.Buffer(3, size)
//old torque evaluations needed for multistep method, storedas globals in run.go
dy_0, dy_1, dy_2 = cuda.Buffer(3, size), cuda.Buffer(3, size), cuda.Buffer(3, size)
}
//slices needed for RK4y0 := cuda.Buffer(3, size)defer cuda.Recycle(y0)data.Copy(y0, y)k1, k2, k3, k4 := cuda.Buffer(3, size), cuda.Buffer(3, size)
, cuda.Buffer(3, size), cuda.Buffer(3, size)defer cuda.Recycle(k1)defer cuda.Recycle(k2)defer cuda.Recycle(k3)defer cuda.Recycle(k4)
//POINT y_0// stage 1torqueFn(k1)data.Copy(y_0,y) //store the magnetizationdata.Copy(dy_0,k1) //store the torque// stage 2Time = t0 + (1./2.)*Dt_sicuda.Madd2(y, y, k1, 1, (1./2.)*h) // m = m*1 + k1*h
/2M.normalize()

A.1 Adams-Bashforth methodes 47
torqueFn(k2)// stage 3cuda.Madd2(y, y0, k2, 1, (1./2.)*h) // m = m0*1 + k2
*1/2M.normalize()torqueFn(k3)// stage 4Time = t0 + Dt_sicuda.Madd2(y, y0, k3, 1, 1.*h) // m = m0*1 + k3*1M.normalize()torqueFn(k4)// 4th order solutionmadd5(y, y0, k1, k2, k3, k4, 1, (1./6.)*h, (1./3.)*h
, (1./3.)*h, (1./6.)*h)M.normalize()
//POINT y_1// stage 1torqueFn(k1)data.Copy(y_1,y) //store the magnetizationdata.Copy(dy_1,k1) //store the torque// stage 2Time = t0 + (1./2.)*Dt_sicuda.Madd2(y, y, k1, 1, (1./2.)*h) // m = m*1 + k1*h
/2M.normalize()torqueFn(k2)// stage 3cuda.Madd2(y, y0, k2, 1, (1./2.)*h) // m = m0*1 + k2
*1/2M.normalize()torqueFn(k3)// stage 4Time = t0 + Dt_sicuda.Madd2(y, y0, k3, 1, 1.*h) // m = m0*1 + k3*1M.normalize()torqueFn(k4)// 4th order solutionmadd5(y, y0, k1, k2, k3, k4, 1, (1./6.)*h, (1./3.)*h
, (1./3.)*h, (1./6.)*h)M.normalize()data.Copy(y_1,y)//NSteps++//setLastErr(err)//setMaxTorque(k4)
NSteps++NSteps++err := cuda.MaxVecDiff(k1, k4) * float64(h)setLastErr(err)setMaxTorque(k4)
AB2M3_init = trueRK4_run = false
} else {
dy_2_P := cuda.Buffer(3, size)defer cuda.Recycle(dy_2_P)
Time = t0 + Dt_si//Adams-Bashforth 2nd order predictorcuda.Madd3(y,y_1,dy_1,dy_0,1,(3./2.)*h,(-1./2.)*h)M.normalize()torqueFn(dy_2)

A.2 FM/AFM grenslaag interacties 48
data.Copy(dy_2_P,dy_2)//Adams-Moulton 3rd order correctormadd4(y,y_1,dy_2,dy_1,dy_0,1,(5./12.)*h,(2./3.)*h,(-1./12.)*
h)M.normalize()
//evaluate step (E)torqueFn(dy_2)
err := cuda.MaxVecDiff(dy_2,dy_2_P)*float64(h)
// adjust next time stepif err < MaxErr || Dt_si <= MinDt || FixDt != 0{ // mindt
check to avoid infinite loopdata.Copy(y_0,y_1)data.Copy(y_1,y)data.Copy(dy_0,dy_1)data.Copy(dy_1,dy_2)setLastErr(err)setMaxTorque(dy_2)NSteps++Time = t0 + Dt_siadaptDt(math.Pow(MaxErr/err, 1./3.))
} else {// undo bad stepfmt.Println("Bad step at t=", t0, ", err=", err)util.Assert(FixDt == 0)Time = t0data.Copy(y, y0)NUndone++adaptDt(math.Pow(MaxErr/err, 1./4.))RK4_run = true
}}
}
func (s *Ab2m2) Free() {}
A.2 FM/AFM grenslaag interacties
Deze code bevindt zich in /mumax/3/engine/EB.go. Omdat de velden van de AFM/FM
interacties bestaan uit een unidirectionele en een uniaxiale bijdrage, werd gebruik gemaakt
van de reeds bestaande functionaliteit van externe opgelegde ’Zeeman-achtige’ velden, en de
magnetokristallijne, uniaxiale anistropie. Door de nieuwe velden zijn er aanpassingen in de
volgende stukken broncode: /mumax/3/engine/mesh.go, /mumax/3/engine/effectivefield.go,
/mumax/3/engine/ext rmsurfacecharge.go.
package engine
// exchange bias modelled with spin flop coupling
import ("github.com/mumax/3/cuda""github.com/mumax/3/data""math"

A.2 FM/AFM grenslaag interacties 49
)
var (//interfacial parameters:Jeb ScalarParam //exchange bias interface
constant per areaKeb derivedParam //exchange bias interface
constant per volumeDeg_of_comp ScalarParam //fraction of compensated
spins at the interfacek_red,k2_red derivedParam //prefactor from anisotropy
term in EB model, k2_red is just a placeholder
//AFM parameters:Ku1_afm ScalarParam //first order uniaxial
constant of antiferromagnetAex_afm ScalarParam //exchange constant
antiferromagnetMsat_afm ScalarParam //sublattice magnetization
antiferromagnetAnisU_afm VectorParam //uniaxial axis
Hfc_dir VectorParam //exchange bias field cooldirection
//fields and energies:B_anis_EB vAdder //field due to anisotropytermE_anis_EB *GetScalar //energy of anisotropy termEdens_anis_EB sAdder //energy density of
anisotropytermBeb excitation //exchange bias zeeman termE_Zeeman_EB *GetScalar //energy of zeemantermEdens_zeeman_EB sAdder //energy density of
zeemanterm)
func init() {Jeb.init("Jeb", "J/m2", "Exchange bias interface constant", []
derived{&k_red})Ku1_afm.init("Ku1_afm", "J/m3", "1st order uniaxial constant
antiferromagnet", []derived{&k_red})Aex_afm.init("Aex_afm", "J/m", "Exchange constant antiferromagnet",
[]derived{&k_red})Msat_afm.init("Msat_afm", "A/m", "Sublattice magnetization
antiferromagnet", []derived{&k_red})Deg_of_comp.init("Deg_of_comp", "", "Fraction of compensated spins
at AFM/FM interface", []derived{&k_red})AnisU_afm.init("AnisU_afm", "", "Uniaxial anisotropy direction of
antiferromagnet")Hfc_dir.init("Hfc_dir", "", "Exchange bias field cool direction")zero.init(1, "_zero", "", nil)Beb.init("Beb", "T", "Exchange bias field direction")
//IMPORTANT://initialise_k_red()//we initialise k_red in SetMesh in mesh.go instead, since it
depends on the cellSizeZ!//B_anis_EB, E_anis_EB and Edens_anis_EB depend on k_red, so we
initialise them too after k_red//with the function initialise_k_red_dependent()
//k2_red is just a placeholder://cuda.AddUniaxialAnisotropy needs k2_Red as argument, so just
initialise as nil

A.2 FM/AFM grenslaag interacties 50
k2_red.init(SCALAR, []updater{}, func(p *derivedParam) {})}
func initialise_k_red() {//temporary variables for the calculation of k_redvar temp_a, temp_b, temp_c, temp_d derivedParam
temp_a.init(SCALAR, []updater{}, func(p *derivedParam) {})temp_b.init(SCALAR, []updater{}, func(p *derivedParam) {})temp_c.init(SCALAR, []updater{}, func(p *derivedParam) {})temp_d.init(SCALAR, []updater{}, func(p *derivedParam) {})Keb.init(SCALAR, []updater{}, func(p *derivedParam) {})
//k_red = Kebˆ2 / (Ku1_afm - Aex_afm*Msat_afmˆ2) * ((2*Aex_afm*Msat_afmˆ2 + Ku1_afm)/(Ku1_afm - Aex_afm*Msat_afm*Msat_afm) - 2)
k_red.init(SCALAR, []updater{&Aex_afm, &Msat_afm,&Ku1_afm,&Jeb,&Deg_of_comp, &Msat}, func(p *derivedParam) {
//TODO: just do this explicitly, and remove these new utilfunctions in util.go
paramDivScalar(Keb.cpu_buf, Jeb.cpuLUT(), cellSizeZ_for_EB)//convert EB per area to EB per volume
paramMult(temp_a.cpu_buf, Aex_afm.cpuLUT(), Msat_afm.cpuLUT())
paramMult(temp_a.cpu_buf, temp_a.cpu_buf, Msat_afm.cpuLUT())paramAddScalar(temp_b.cpu_buf,temp_a.cpu_buf, 0.0) //temp_b.
cpu_buf = temp_a.cpu_buf not allowed: use this lineinstead
paramMultScalar(temp_a.cpu_buf, temp_a.cpu_buf, 2.0)paramAdd(temp_a.cpu_buf, temp_a.cpu_buf, Ku1_afm.cpuLUT())paramSub(temp_d.cpu_buf, Ku1_afm.cpuLUT(), temp_b.cpu_buf)paramDiv(temp_c.cpu_buf, temp_a.cpu_buf, temp_d.cpu_buf)paramSubScalar(temp_c.cpu_buf,temp_c.cpu_buf, 2.0)paramMult(temp_c.cpu_buf,Keb.cpu_buf,temp_c.cpu_buf)paramMult(temp_c.cpu_buf,Keb.cpu_buf,temp_c.cpu_buf)paramDiv(temp_c.cpu_buf,temp_c.cpu_buf,temp_d.cpu_buf)paramMult(temp_c.cpu_buf,Deg_of_comp.cpuLUT(),temp_c.cpu_buf
)//divide by saturation magnetizationparamDiv(p.cpu_buf, temp_c.cpu_buf, Msat.cpuLUT())
})}
func initialise_k_red_dependent() {B_anis_EB.init("B_anis_EB", "T", "Anisotropy field EB",
AddExchangeBiasField)E_anis_EB = NewGetScalar("E_anis_EB", "J", "Anisotropy energy EB",
GetAnisotropyEnergy_EB)Edens_anis_EB.init("Edens_anis_EB", "J/m3", "Anisotropy energy
density EB", AddAnisotropyEnergyDensity_EB)registerEnergy(GetAnisotropyEnergy_EB, Edens_anis_EB.AddTo)E_Zeeman_EB = NewGetScalar("E_Zeeman_EB", "J", "Zeeman energy EB",
GetZeemanEnergy)Edens_zeeman_EB.init("Edens_Zeeman_EB", "J/m3", "Zeeman energy
density EB", makeEdensAdder(&Beb, -1))registerEnergy(GetZeemanEnergy_EB, Edens_zeeman_EB.AddTo)
}
func addUniaxialAnisotropyField_EB(dst *data.Slice) {if k_red.nonZero() {
cuda.AddUniaxialAnisotropy(dst, M.Buffer(), k_red.gpuLUT1(),k2_red.gpuLUT1(), AnisU_afm.gpuLUT(), regions.Gpu())
}}

A.2 FM/AFM grenslaag interacties 51
// Add the exchange bias field to dstfunc AddExchangeBiasField(dst *data.Slice) {
//uniaxial anisotropy termaddUniaxialAnisotropyField_EB(dst)
//set exchange bias zeemantermfor r := 0; r < NREGION; r++ {
var v data.Vector = unslice(AnisU_afm.getRegion(r))var Hfc_vec data.Vector = unslice(Hfc_dir.getRegion(r))var eb_sign float64var Deg_of_uncomp = 1.0 - Deg_of_comp.getRegion(r)[0]; //
uncompensated spins make up zeemanterm
//determine in which direction of the anisotropy axis theexchange bias sets in
//This symmetry is simply broken by the field cool directionif(v.Dot(Hfc_vec) >= 0) {
eb_sign = 1.0} else {
eb_sign = -1.0}//normalise vif(v.Len() != 0){
v = v.Div(v.Len())}
v = v.Mul(eb_sign*Deg_of_uncomp*4*math.Pi*math.Pow(10,-7)*Keb.GetRegion(r)[0])
Beb.perRegion.upd_reg[r] = nilBeb.perRegion.bufset_(r, slice(v))
}Beb.perRegion.invalidate()
}
func AddAnisotropyEnergyDensity_EB(dst *data.Slice) {haveUnixial := k_red.nonZero() || k2_red.nonZero()
if !haveUnixial {return
}
buf := cuda.Buffer(B_anis_EB.NComp(), B_anis_EB.Mesh().Size())defer cuda.Recycle(buf)
// unnormalized magnetization:Mf, r := M_full.Slice()if r {
defer cuda.Recycle(Mf)}
if haveUnixial {// 1stcuda.Zero(buf)cuda.AddUniaxialAnisotropy(buf, M.Buffer(), k_red.gpuLUT1(),
zero.gpuLUT1(), AnisU_afm.gpuLUT(), regions.Gpu())cuda.AddDotProduct(dst, -1./2., buf, Mf)
// 2ndcuda.Zero(buf)cuda.AddUniaxialAnisotropy(buf, M.Buffer(), zero.gpuLUT1(),
k2_red.gpuLUT1(), AnisU_afm.gpuLUT(), regions.Gpu())cuda.AddDotProduct(dst, -1./4., buf, Mf)
}}

A.2 FM/AFM grenslaag interacties 52
// Returns anisotropy energy in joules.func GetAnisotropyEnergy_EB () float64 {
buf := cuda.Buffer(1, Edens_anis_EB.Mesh().Size())defer cuda.Recycle(buf)
cuda.Zero(buf)AddAnisotropyEnergyDensity_EB(buf)return cellVolume() * float64(cuda.Sum(buf))
}
func GetZeemanEnergy_EB() float64 {return -1 * cellVolume() * dot(&M_full, &Beb)
}

BIBLIOGRAFIE 53
Bibliografie
[1] L. Landau and E. Lifshitz. On the theory of the dispersion of magnetic permeability
in ferromagnetic bodies. Physikalische Zeitschrift der Sowjetunion, 8:153, 1935.
[2] William F. Brown. Micromagnetics. Wiley, 1963.
[3] J. Coey. Magnetism and Magnetic Materials. Cambridge, 2009.
[4] J. Nogues and I.K. Schuller. Exchange bias. Journal of Magnetism and Magnetic
Materials, 192(2):203–232, 1999.
[5] J. Nogues, J. Sort, V. Langlais, V. Skumryev, S. Surinach, J.S. Munoz, and M.D.
Baro. Exchange bias in nanostructures. Physics Reports, 422(3):65–117, 2005.
[6] M. Kiwi. Exchange bias theory. Journal of Magnetism and Magnetic Materials,
234(3):584–595, 2001.
[7] H. Szambolics. New numerical approaches for micromagnetism and Current-induced
domain wall motion. Phd thesis, Institut National Polytechnique de Grenoble - INPG,
2008.
[8] K.H.J. Buschow. Handbook of Magnetic Materials. Elsevier Science, 2006.
[9] I. Cimrak. A survey on the numerics and computations for the landau-lifshitz equation
of micromagnetism. Archives of Computational Methods in Engineering, 15(3):1–37,
2007.
[10] A. Vansteenkiste, J. Leliaert, M. Dvornik, M. Helsen, F. Garcia-Sanchez, and
B. Van Waeyenberge. The design and verification of mumax3. AIP Advances, 4(10),
2014.
[11] M. Lakshmanan. The fascinating world of the Landau-Lifshitz-Gilbert equation:
an overview. Philosophical Transactions of the Royal Society of London Series A,
369:1280–1300, 2011.

BIBLIOGRAFIE 54
[12] M. Getzlaff. Fundamentals of magnetism. Springer Science & Business Media, 2007.
[13] M. D’Aquino. Nonlinear magnetization dynamics in thin-films and nanoparticles. PhD
thesis, Universita degli Studi di Napoli Federico II, 2005.
[14] Lennart Edsberg. Introduction to computation and modeling for differential equations.
John Wiley & Sons, Hoboken NJ, 2008.
[15] S. Mitropoulos, V. Tsiantos, K. Ovaliadis, D. Kechrakos, and M. Donahue. Stiff
modes in spinvalve simulations with oommf. Physica B: Condensed Matter, 486:169 –
172, 2016. 10th International Symposium on Hysteresis Modeling and Micromagnetics
(HMM 2015).
[16] J.C. Butcher. Numerical Methods for Ordinary Differential Equations. Wiley, 2003.
[17] J. Beisheim. Speed up simulations with a gpu. Ansys Advantage, 4:I2, 2010.
[18] muMAG micromagnetic Modeling Activity Group. mumag standard problem nr.4,
2000.
[19] F. Bashforth and J. Adams. An Attempt to Test the Theories of Capillary Action.
University Press, 1883.
[20] F. Moulton. New methods in exterior ballistics. University of Chicago Press, 1926.
[21] E. Suli. Numerical solution of ordinary differential equations, 2014.
[22] R. Jungblut, R. Coehoorn, M.T. Johnson, Ch. Sauer, P.J. Van der Zaag, A.R. Ball,
Th. G.S.M. Rijks, J. aan de Stegge, and A. Reinders. Exchange biasing in mbe-
grown ni80fe20/fe50mn50 bilayers. Journal of Magnetism and Magnetic Materials,
148(1):300–306, 1995.
[23] H. Ohldag, A. Scholl, F. Nolting, E. Arenholz, S. Maat, A. T. Young, M. Carey, and
J. Stohr. Correlation between exchange bias and pinned interfacial spins. Physical
Review Letters, 91:017203, 2003.
[24] D.C. Jiles. Introduction to Magnetism and Magnetic Materials, Second Edition. Taylor
& Francis, 1998.
[25] E. Folven, J. Linder, O. V. Gomonay, A. Scholl, A. Doran, A. T. Young, S. T. Retterer,
V. K. Malik, T. Tybell, Y. Takamura, and J. K. Grepstad. Controlling the switching

BIBLIOGRAFIE 55
field in nanomagnets by means of domain-engineered antiferromagnets. Physical Re-
view B, 92:094421, 2015.
[26] Y. Takamura, E. Folven, J.B.R. Shu, K.R. Lukes, B. Li, A. Scholl, A.T. Young, S.T.
Retterer, T. Tybell, and J.K. Grepstad. Spin-flop coupling and exchange bias in
embedded complex oxide micromagnets. Physical Review Letters, 111:107201, 2013.
[27] J. Leliaert, B. Van de Wiele, A. Vansteenkiste, L. Laurson, G. Durin, L. Dupre,
and B. Van Waeyenberge. Current-driven domain wall mobility in polycrystalline
permalloy nanowires: A numerical study. Journal of Applied Physics, 115(23):233903,
2014.





























