Embed Size (px)
Citation preview

SEMESTRE MARZO - JULIO 2009
MICROCONTROLADORES Y SU APLICACION
EN ROBOTICA
UTA
2009
PROFESOR:
ING. G. ALMEIDA
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

OBJETIVOS
DISTINGUIR LOS ASPECTOS GENERALES,CARACTERISTICAS Y FUNCIONAMIENTO DEUN MICROCONTROLADOR.
ANALIZAR CARACTERISTICAS DEFUNCIONAMIENTO Y APLICACION DE UNMICROCONTROLADOR PIC DE MICROCHIP
ING GUILLERMO ALMEIDA
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

INTRODUCCION
En los últimos años, los microcontroladoreshan evolucionado en forma impresionante. Enaños atrás los microcontroladores eranimplementados con sistemas mínimos queocupaban un gran espacio físico, esto es,debían de tener una memoria de programaexterna, una memoria RAM externa, el circuitoexterno de reloj y la interfaz periféricaprogramable.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

INTRODUCCION
Un MICROCONTROLADOR es un circuito
integrado programable que acepta un listado
de instrucciones y contiene todos los
componentes de un computador. Se utilizan
para realizar determinadas tareas o para
gobernar dispositivos y debido a su reducido
tamaño, suele ir incorporado en el propio
dispositivo que gobierna.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

DIFERENCIA ENTRE MICROCONTROLADOR
Y MICROPROCESADOR
Un MICROPROCESADOR es un sistema
abierto con el que puede contruirse un
computador con las caracteristicas que se
desee, acoplándole los modulos necesarios.
Un MICROCONTROLADOR es un sistema
cerrado que contiene un computador completo y
de prestaciones limitadas no modificables.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

DEFINICION
Un microcontrolador es un pequeñodispositivo electrónico en forma de circuitointegrado similar a un pequeñomicrocomputador pero sin unidades deentrada y/o salida como monitor, teclado,unidades de disco etc. Su aplicación hoy endía se ha extendido a la mayoría de artefactoselectrónicos como microondas, televisores,celulares, etc.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA
ESTRUCTURA INTERNA
• Procesador o CPU
• Memoria RAM de datos.
• Memoria de programa ROM/PROM/EPROM/EEPROM &
FLASH.
• Líneas E/S para comunicarse con el exterior.
• Módulos para el control de periféricos (temporizadores,
Puertos Serie y Paralelo, A/D y D/A, etc.).
• Generador de impulsos para sincronizar el
funcionamiento del sistema
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA
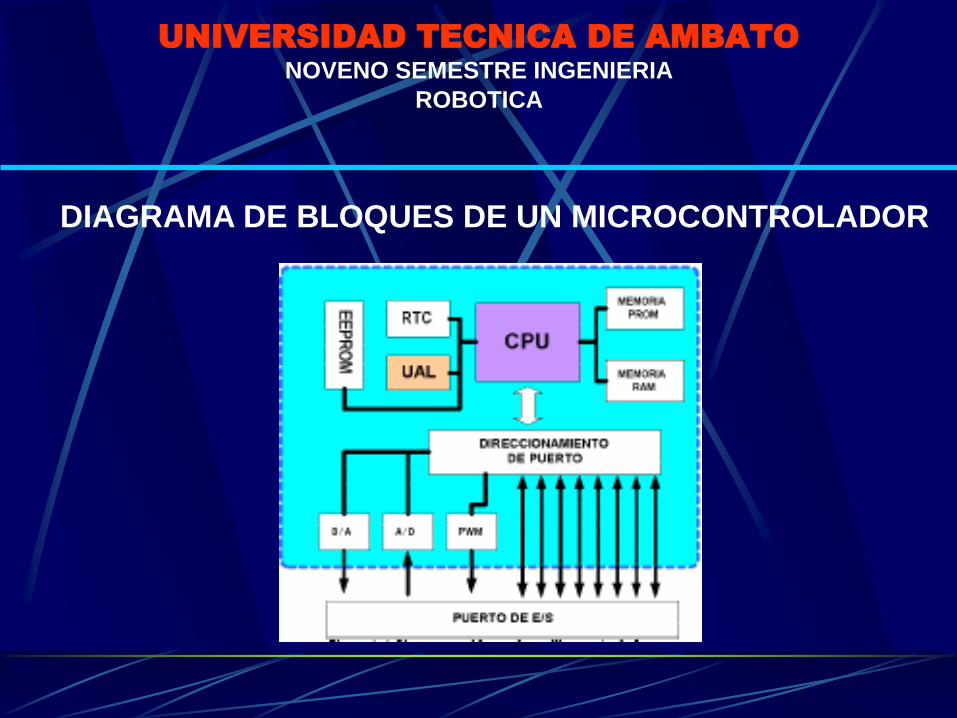
DIAGRAMA DE BLOQUES DE UN MICROCONTROLADOR
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

APLICACIONES
La aplicación de los microcontroladores es tan
amplia que hoy en día están incursionando en
proyectos tecnológicos de investigación
científica y tecnológica, como el control de
naves aeroespaciales y robótica.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

APLICACIONES
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA
TIPOS DE ARQUITECTURA
Arquitectura Von-Newman
Utilizan un único bus de datos parainstrucciones y datos.
Las instrucciones del programa y los datos seguardan conjuntamente en una memoriacomún.
Cuando la CPU se dirige a la memoriaprincipal, primero accede a la instrucción ydespués a los datos necesarios paraejecutarla, esto retarda el funcionamiento.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA
TIPOS DE ARQUITECTURA
Arquitectura Harvard
El bus de datos y el bus de instrucción estánseparados
Acceso en paralelo:
Cuando se está leyendo una instrucción, lainstrucción actual está utilizando el bus de datos
Una vez finalizada la instrucción actual, lasiguiente ya está disponible en la CPU.
Permite una ejecución más rápida
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

Arquitectura Harvard
Arquitectura Von Newman
TIPOS DE ARQUITECTURA
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

TIPOS
El microcontrolador más extendido es elmicrocontrolador PIC de la marcaMICROCHIP, también existen los AVR de lamarca ATMEL y los antiguos Z80 de lamarca INTEL, entre los más conocidos.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

MICROCONTROLADOR PIC
El microcontrolador PIC es uno de los más
aceptados por la mayoría de los ingenieros
en sistemas digitales y control por su
potencia en cuanto a control y precio.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

CARACTERISTICAS
EL PIC es un microcontrolador de arquitecturaHARVARD, de clase RISC(Reduced Instruction SetComputer) y tecnología CMOS(ComplementaryMetal Oxide Semiconductor) de alta velocidadconsta de memorias de programas FLASH ymemorias de datos RAM y EEPROM y utiliza unjuego de treinta y cinco instrucciones en lenguajeAssembler, para su programación.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

ARQUITECTURA
EL PIC es un microcontrolador de gran
desempeño, esto se debe a la arquitectura
HARVARD, que hace que el programa y los datos
sean accesados en memorias separadas, teniendo
así un bus de memoria de programa y un bus de
memoria de datos, a diferencia de la VON
NEWMAN que hace uso de una sola memoria.
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

CISC
Complex Instruction Set Computer
• Casi todos los microcontroladores actuales
tienen un juego de instrucciones complejo y
amplio
• El conjunto de instrucciones típico de un
microcontrolador es de más de 80
• El conjunto de instrucciones es bastante
heterogéneo
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA
RISC
Reduced Instruction Set Computers
Al tener un conjunto de instrucciones reducido:
• El controlador es más sencillo y el chip es más
pequeño
• Es más rápido
• Tiene un consumo menor
Principales características:
• Juego de instrucciones ortogonal
• Usan cualquier modo de direccionamiento
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

SISC
Specific Instruction Set Computer
• Incluyen instrucciones específicas para control
• Instrucciones de entrada/salida eficaces y
sencillas
• Instrucciones específicas para operar a nivel de
bit
• Instrucciones para operaciones con tablas de
datos
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA
Los microcontroladores vienen ahora con una
serie de características que son de una gran
ayuda al ingeniero de control:
– Temporizadores
– Watchdog
– Circuitos ”sleep/wakeup" microcontrolador
– Modos potentes de direccionamiento E/S
– Circuitos conversores analógico/digital etc.
– Digital Signal Processors
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

MICROCONTROLADOR PIC (MicroChip)
• Los microcontroladores PIC son populares
desde hace más de 20 años
• Fueron los primeros microcontroladores RISC
• El diseño RISC es más sencillo, lo que permite
añadir más características a bajo precio
• Tiene pocas instrucciones (33 instrucciones el
16C5X mientras que el Intel 8048 tiene más de
90)
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA

TRABAJO INDIVIDUAL
Utilizando Minmanager elabore un mapa
mental individual sobre los microcontroladores
en general y específicamente sobre el
microcontrolador PIC, amplíe su resumen
usando información adicional del Internet
UNIVERSIDAD TECNICA DE AMBATO
NOVENO SEMESTRE INGENIERIA
ROBOTICA





























