Embed Size (px)
Citation preview

Vib
ration
Mea
sure
men
t Sys
tems
H.Ahmad
ian
Intr
oduc
tion
Syllabus
Mea
sure
men
t C
hara
cter
isti
cs
Tra
nsd
uce
rs
-F
un
da
men
tals
of
Vib
rati
on
-V
ibra
tion
Tra
nsd
uce
rs
Fu
nd
am
enta
ls o
f S
ign
al
An
aly
sis
Fau
lt D
etec
tion
an
d D
iagn
osi
s in
Rota
tin
g M
ach
iner
y
Case
His
tori
es

Mea
sure
men
t Char
acte
rist
ics
Ch
aracte
ris
tics o
f In
str
um
en
tati
on
Op
erati
on
al
Mo
des o
f In
str
um
en
tati
on
s
Sta
tic a
nd
Dyn
am
ic C
haracte
ris
tics o
f In
str
um
en
tati
on
Measu
rem
en
t A
ccu
racy
Measu
rem
en
t S
tan
dard
s
Sim
ple
instr
um
ent
model
Sensitiv
ity
Accura
cy a
nd E
rror
Tra
nsduc
ers
Fun
dam
enta
ls o
f Vib
ration
s
SD
OF S
yste
ms
Undam
ped
Fre
e V
ibra
tion
Dam
ped F
ree V
ibra
tion
Harm
onic
Forc
ing
Arb
itra
ry F
orc
ing
MD
OF S
yste
ms
…

Tra
nsduc
ers
Vib
ration
Tra
nsduc
ers
Accele
rati
on
Vib
rati
on
an
d S
ho
ck
Measu
rem
en
t
Accele
rom
ete
r D
ynam
ics
Ele
ctr
om
echanic
al Forc
e-B
ala
nce (
Serv
o)
Accele
rom
ete
rs
Tra
nsduc
ers
Vib
ration
Tra
nsduc
ers
Pie
zoele
ctr
ic A
ccele
rom
ete
rs
Pie
zore
sis
tive
Accele
rom
ete
rs
Diffe
rential-
Capacitance
Accele
rom
ete
rs

Tra
nsduc
ers
Vib
ration
Tra
nsduc
ers
Str
ain
-Gage A
ccele
rom
ete
rs
Seis
mic
Accele
rom
ete
rs
Inert
ial Types,
Cantile
ver,
and S
uspended-
Mass C
onfigura
tion
Ele
ctr
osta
tic F
orc
e F
eedback A
ccele
rom
ete
rs
Mic
roaccele
rom
ete
rs
Cro
ss-A
xis
Sensitiv
ity
Sele
ction,
Full-S
cale
Range,
and O
verload
Capability
Sig
nal Conditio
nin
g
Fun
dam
enta
ls o
f Signa
l Ana
lysis
Tim
e,
Freq
uen
cy a
nd
Mo
dal
Do
main
s
•The T
ime D
om
ain
•The F
requency D
om
ain
•In
str
um
enta
tion for
the F
requency D
om
ain

Fun
dam
enta
ls o
f Signa
l Ana
lysis
•The M
odal D
om
ain
•In
str
um
enta
tion for
the M
odal D
om
ain
Fun
dam
enta
ls o
f Signa
l Ana
lysis
Un
dersta
nd
ing
Dyn
am
ic S
ign
al
An
aly
sis
FFT P
ropert
ies
Sam
pling a
nd D
igitiz
ing
Aliasin
g
Band S
ele
cta
ble
Analy
sis
Win
dow
ing
Avera
gin
g
Real Tim
e B
andw
idth
Overlap P
rocessin
g
Usin
g D
yn
am
ic S
ign
al
An
aly
sers
Fau
lt D
etec
tion
and
Diagn
osis in
Rot
ating
Mac
hiner
y
Fau
lt D
etec
tion
and
Diagn
osis in
Rot
ating
Mac
hiner
y
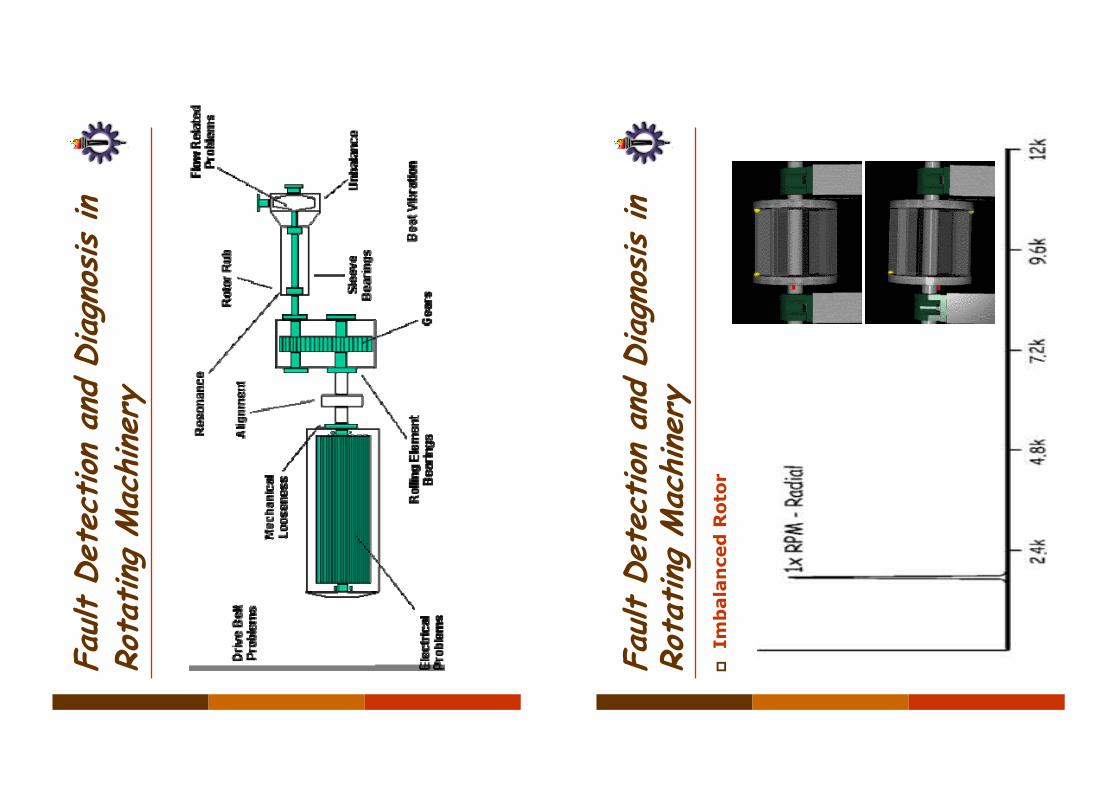
Im
bala
nced
Ro
tor
Fau
lt D
etec
tion
and
Diagn
osis in
Rot
ating
Mac
hiner
y
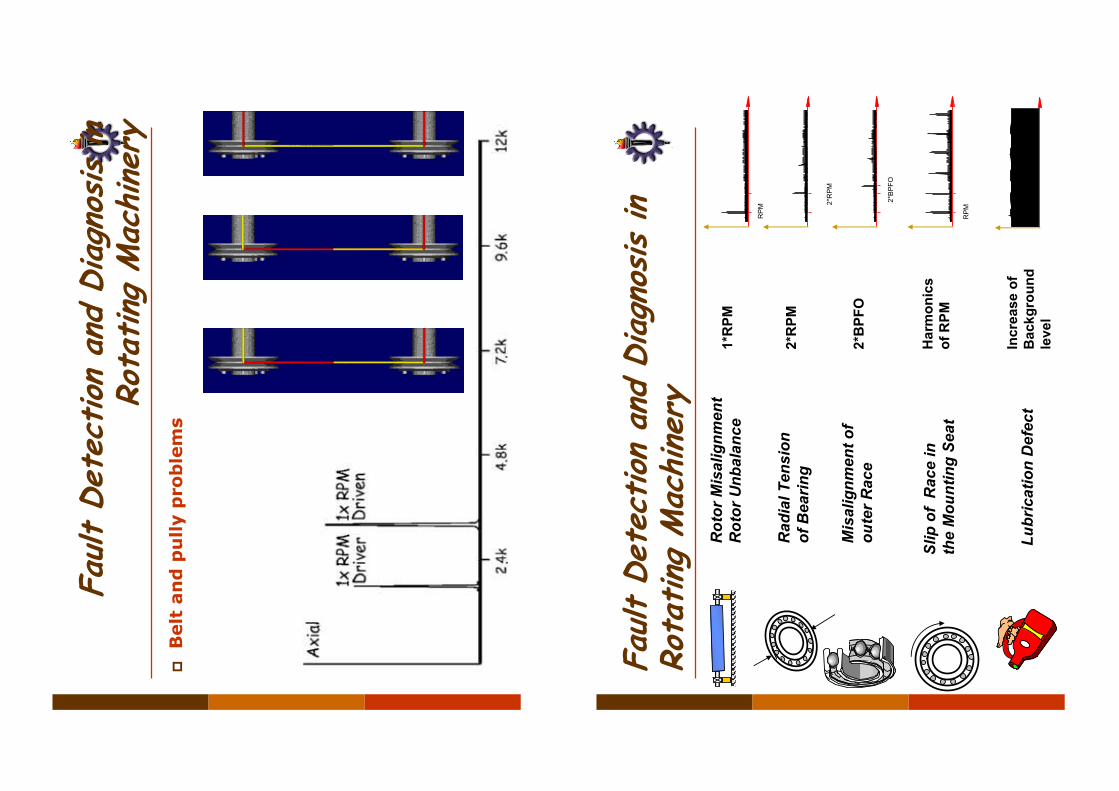
Belt
an
d p
ull
yp
ro
ble
ms
Fau
lt D
etec
tion
and
Diagn
osis in
Rot
ating
Mac
hiner
y
RP
M
2*R
PM
2*B
PF
O
Lu
bri
cati
on
De
fect
Ro
tor
Mis
alig
nm
en
t
Ro
tor
Un
ba
lan
ce
Rad
ial T
en
sio
n
of
Beari
ng
Mis
alig
nm
en
t o
f
ou
ter
Ra
ce
Slip
of
Race i
n
the
Mo
un
tin
g S
ea
t
2*R
PM
1*R
PM
2*B
PF
O
Harm
on
ics
of
RP
M
Incre
ase o
f
Backg
rou
nd
level
RP
M
Ref
eren
ces
& C
ours
e Eva
luat
ion
Ref
eren
ces:
Measure
ment,
Instr
um
enta
tion,
and S
ensors
H
andbook C
RCnetB
ase
1999.
Fundam
enta
ls o
f Rota
ting M
achin
ery
Dia
gnostics,
Donald
E.
Bently,
2002.
Cou
rse
Eva
luat
ion
Sch
eme
Mid
-Term
30
%
Co
urse P
ro
ject
20
%
Fin
al
Exam
5
0%
Vib
ration
Mea
sure
men
t Sys
tems
H.A
hm
adia
n
Mea
sure
men
tChar
acte
rist
ics
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
2
Pres
enting
Top
ics
Char
acte
rist
ics
of
Inst
rum
enta
tion
Sim
ple
Inst
rum
ent
Model
Pass
ive
and A
ctiv
e Sen
sors
Cal
ibra
tion
Modifyi
ng a
nd I
nte
rfer
ing I
nputs
Acc
ura
cy a
nd E
rror
Oper
atio
nal
Modes
of
Inst
rum
enta
tion
Def
lect
ion I
nst
rum
ent
Null
Inst
rum
ent
Anal
og a
nd D
igital
Sen
sors
Anal
og a
nd D
igital
Rea
dout
Inst
rum
ents
Input
Imped
ance
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
3
Mea
sure
men
t Char
acte
rist
ics
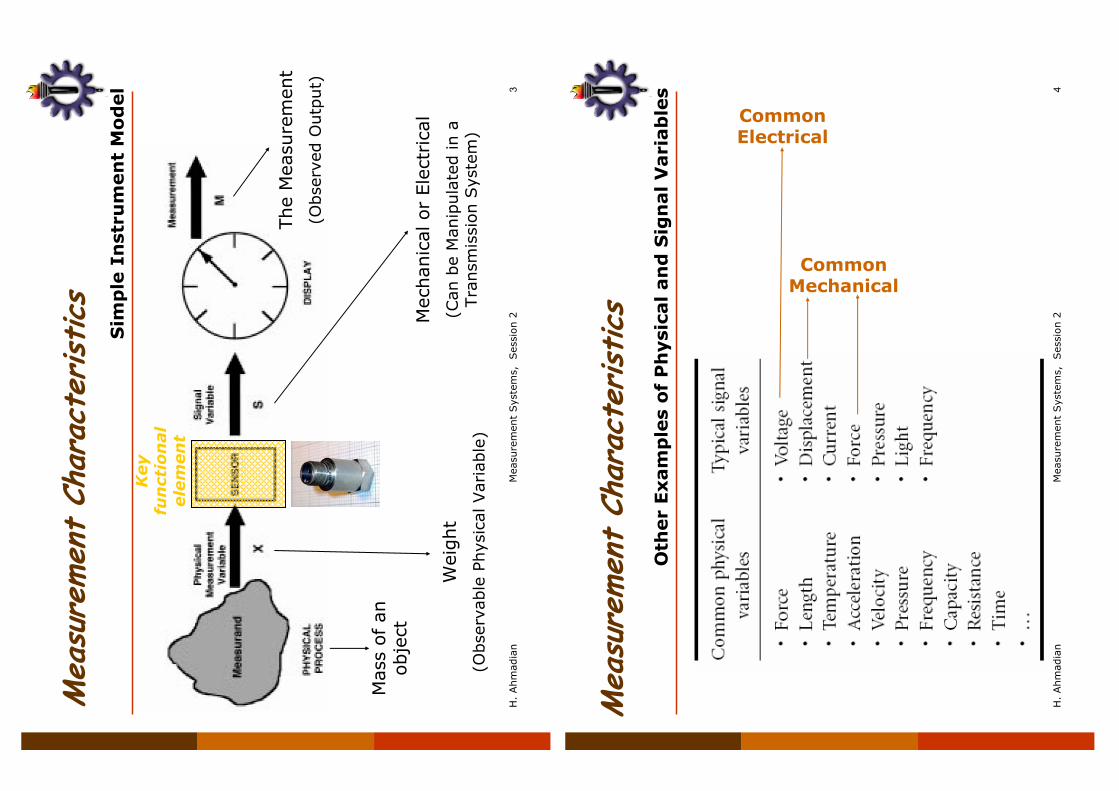
Sim
ple
In
stru
men
t M
od
el
Mas
s of an
obje
ct
Wei
ght
(Obse
rvab
le P
hys
ical
Var
iable
)
Key
fun
ctio
nal
ele
men
t
Mec
han
ical
or
Ele
ctrica
l
(Can
be
Man
ipula
ted in a
Tra
nsm
issi
on S
yste
m)
The
Mea
sure
men
t
(Obse
rved
Outp
ut)
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
4
Mea
sure
men
t Char
acte
rist
ics
Oth
er
Exam
ple
s o
f P
hysi
cal an
d S
ign
al V
ari
ab
les
CommonMechanical
CommonElectrical
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
5
Mea
sure
men
t Char
acte
rist
ics
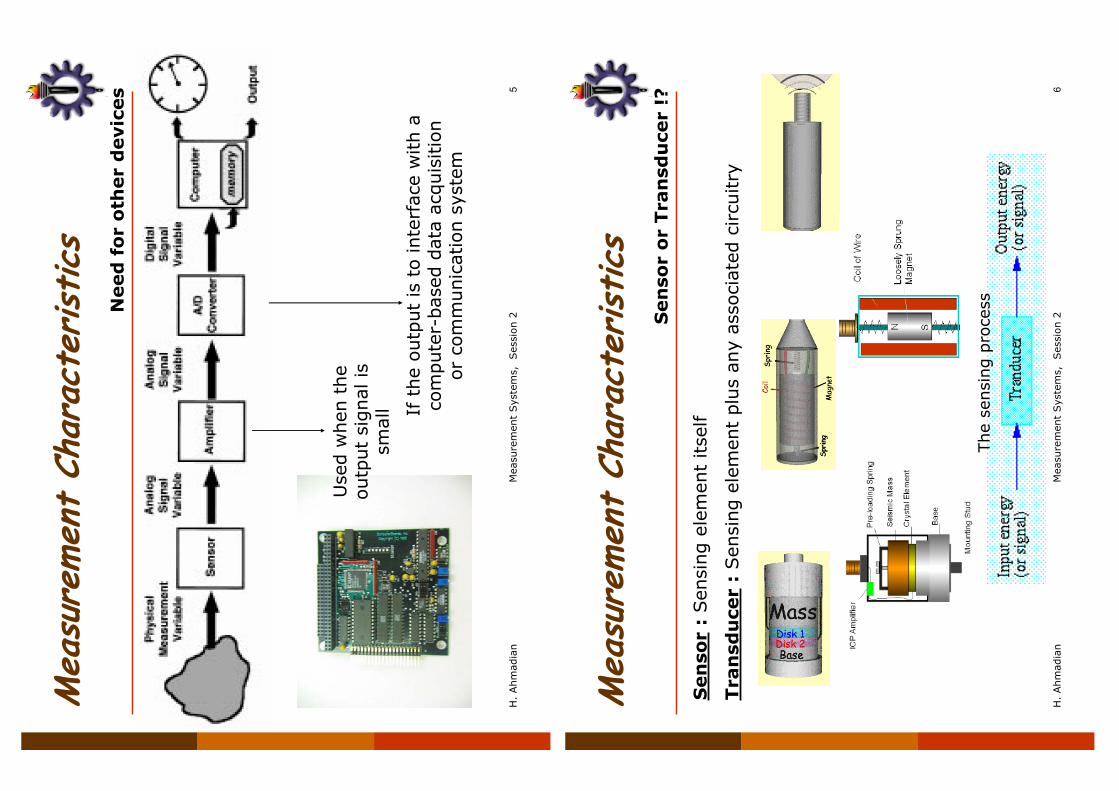
Need
fo
r o
ther
devic
es
If t
he
outp
ut
is t
o inte
rfac
e w
ith a
co
mpute
r-bas
ed d
ata
acquis
itio
n
or
com
munic
atio
n s
yste
m
Use
d w
hen
the
outp
ut
signal
is
smal
l
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
6
Mea
sure
men
t Char
acte
rist
ics
Sen
sor
or
Tra
nsd
uce
r !?
Sen
sor
:Sen
sing e
lem
ent
itse
lf
Tra
nsd
uce
r:
Sen
sing e
lem
ent
plu
s an
y as
soci
ated
circu
itry
The
sensi
ng p
roce
ss
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
7
Mea
sure
men
t Char
acte
rist
ics
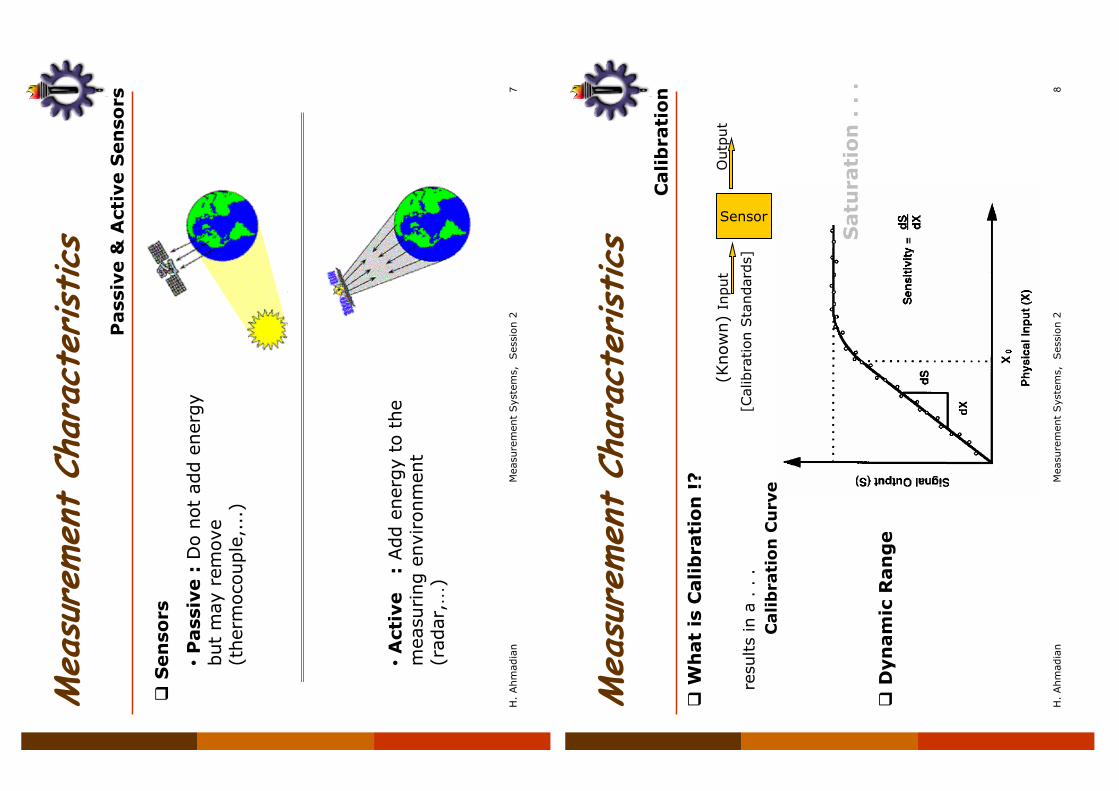
Pass
ive &
Act
ive S
en
sors
Sen
sors
•P
ass
ive :
Do n
ot
add e
ner
gy
but
may
rem
ove
(t
her
moco
uple
,...
)
•A
ctiv
e :
Add e
ner
gy
to t
he
mea
suring e
nvi
ronm
ent
(rad
ar,…
)
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
8
Mea
sure
men
t Char
acte
rist
ics
Calib
rati
on
Sensor
Input
Outp
ut
(Know
n)
Wh
at
is C
alib
rati
on
!?
Dyn
am
ic R
an
ge
resu
lts
in a
. .
.[C
alib
ration S
tandar
ds]
Satu
rati
on
. .
.
Cali
bra
tio
n C
urv
e
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
9
Mea
sure
men
t Char
acte
rist
ics
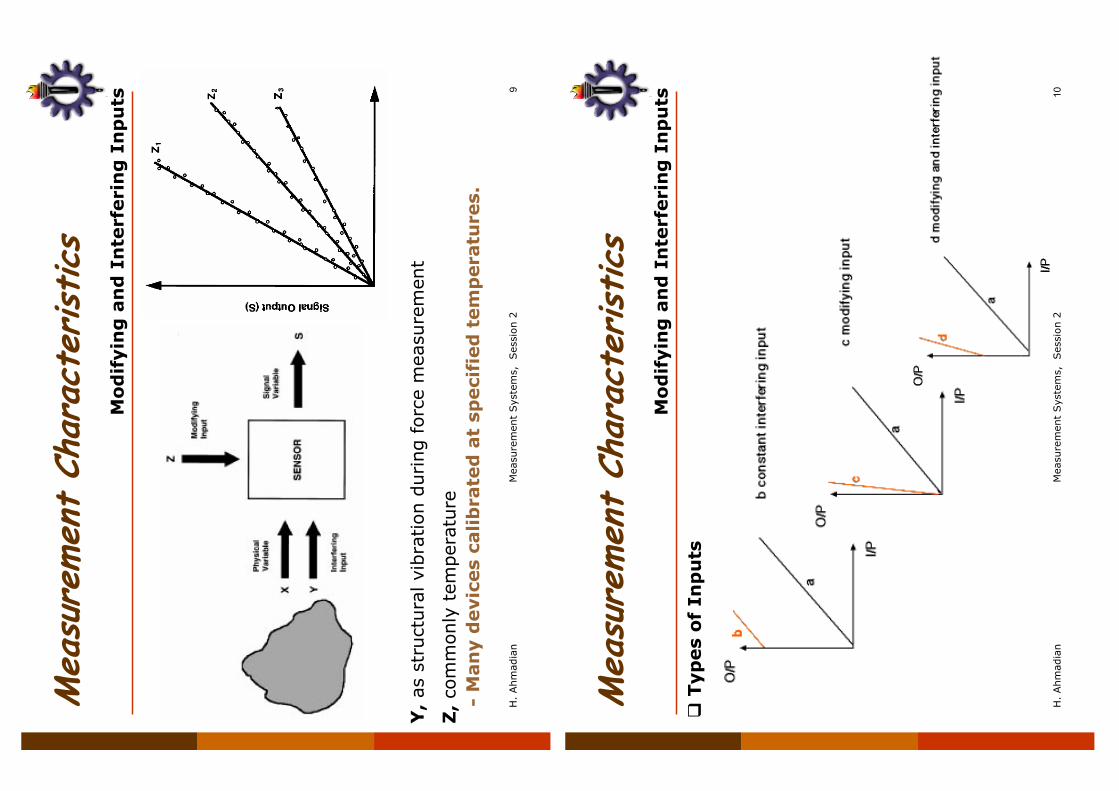
Mo
dif
yin
g a
nd
In
terf
eri
ng
In
pu
ts
Y,
as s
truct
ura
l vi
bra
tion d
uring forc
e m
easu
rem
ent
Z,
com
mon
ly t
emper
ature
-M
an
y d
evic
es
calib
rate
d a
t sp
eci
fied
tem
pera
ture
s.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
10
Mea
sure
men
t Char
acte
rist
ics
Mo
dif
yin
g a
nd
In
terf
eri
ng
In
pu
ts
Typ
es
of
Inp
uts
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
11
Mea
sure
men
t Char
acte
rist
ics
Err
or,
Acc
ura
cy &
Pre
cisi
on
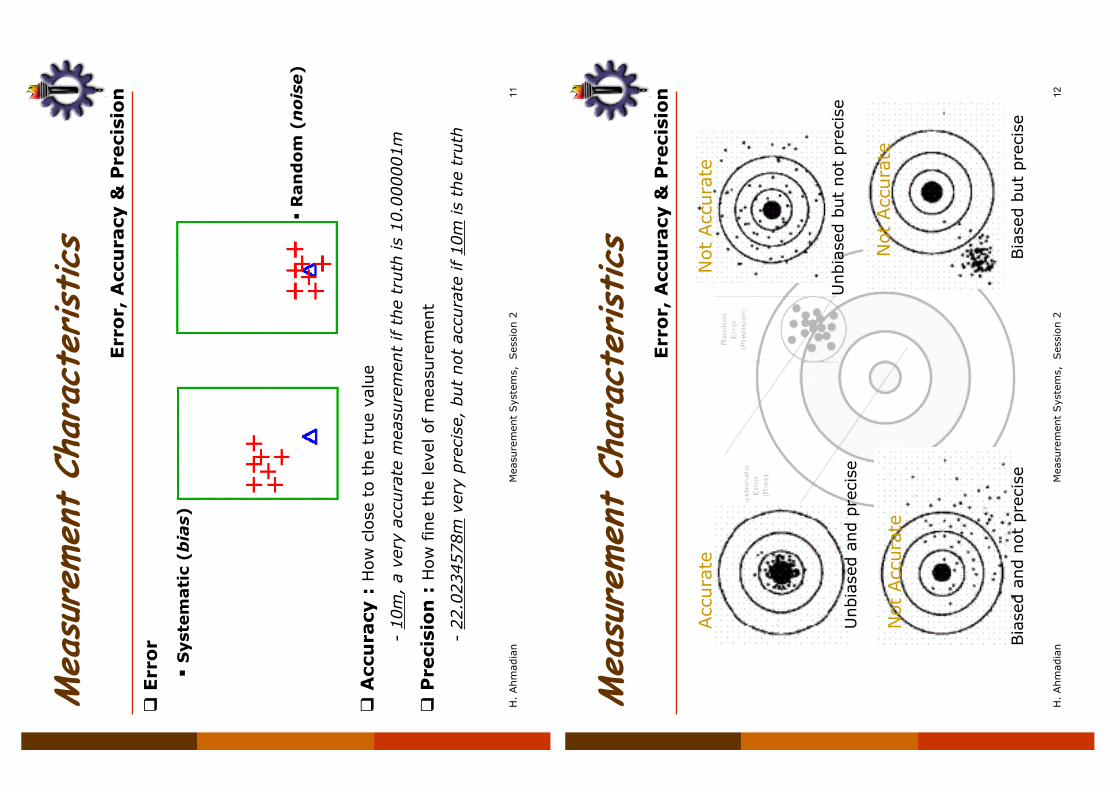
Err
or
Syst
em
ati
c (b
ias)
Ran
do
m (
no
ise)
Acc
ura
cy :
How
clo
se t
o t
he
true
valu
e
-10m
, a
very
acc
ura
te m
easu
rem
ent
if t
he
truth
is
10.0
00001m
Pre
cisi
on
: H
ow
fin
e th
e le
vel of m
easu
rem
ent
-22.0
234578m
very
pre
cise
, but
not
accu
rate
if 10m
is t
he
truth
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
12
Mea
sure
men
t Char
acte
rist
ics
Err
or,
Acc
ura
cy &
Pre
cisi
on
Bia
sed a
nd n
ot
pre
cise
Bia
sed b
ut
pre
cise
Not
Acc
ura
teN
ot
Acc
ura
te
Acc
ura
teN
ot
Acc
ura
te
Unbia
sed b
ut
not
pre
cise
Unbia
sed a
nd p
reci
se

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
13
Mea
sure
men
t Char
acte
rist
ics
Err
or
sou
rces
Syst
em
ati
c (b
ias)
Err
or
So
urc
es
Mis
-cali
bra
tio
ndue
to m
odifyi
ng inputs
lik
e
-te
mper
ature
-ag
ing
Invasi
ven
ess
(m
easu
rem
ent
pro
cess
its
elf ch
anges
the
mea
sure
d)
-la
rge
war
m t
her
mom
eter
for
smal
l co
ld v
olu
me
of
fluid
-si
gnal
pat
h o
f m
easu
rem
ent
pro
cess
-hum
an o
bse
rver
s lik
e par
alla
x
Can
be R
em
oved
by c
om
pen
sati
on
meth
od
s
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
14
Mea
sure
men
t Char
acte
rist
ics
Err
or
sou
rces
seviation
standard
:
68%
95% 9
9.7
% (Wid
th o
f dis
trib
ution)
Ran
do
m (
no
ise)
Err
or
So
urc
es
-G
auss
ian d
istr
ibution
Rep
eata
bil
ity o
f m
easu
red
as
in r
ough s
urf
aces
’hei
ght
mea
sure
men
t
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
15
Mea
sure
men
t Char
acte
rist
ics
Err
or
sou
rces
Ran
do
m (
no
ise)
Err
or
So
urc
es
(cont.
)
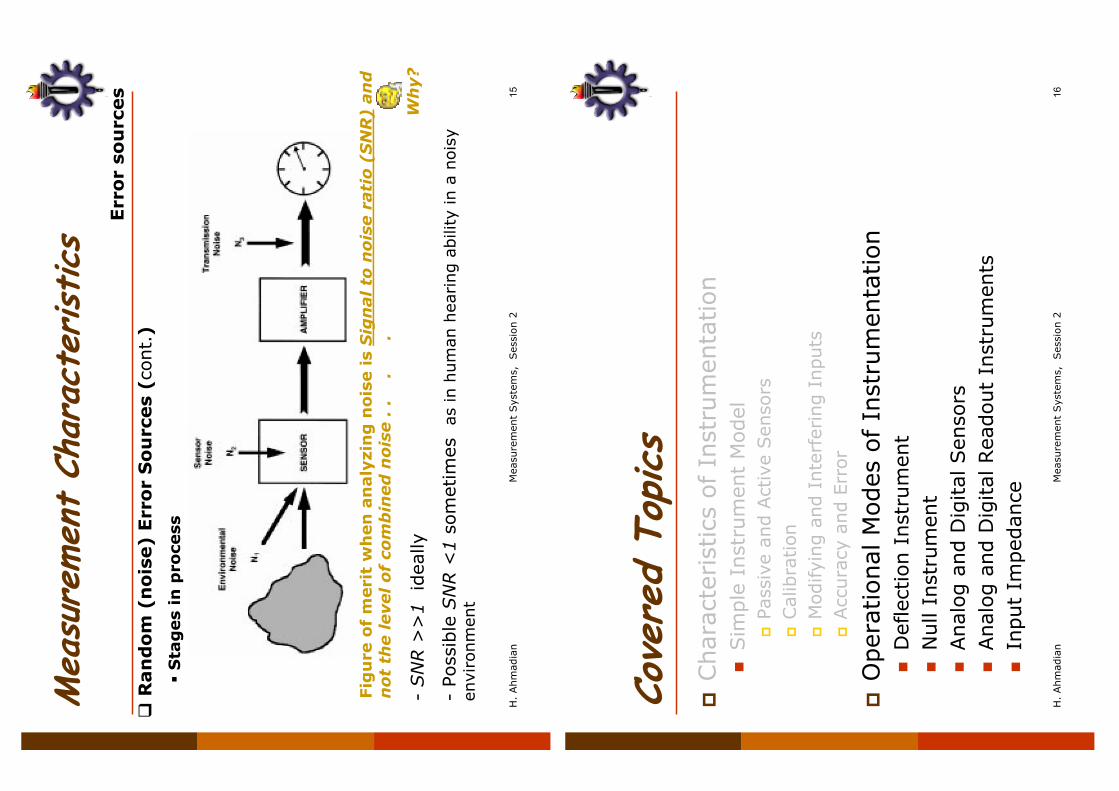
Sta
ges
in p
roce
ss
Fig
ure
of
meri
t w
hen
an
aly
zin
g n
ois
e i
s S
ign
al
to n
ois
e r
ati
o (
SN
R)
an
d
no
t th
e l
evel
of
com
bin
ed
no
ise .
.
.
.
Wh
y?
-SN
R >
>1
idea
lly
-Poss
ible
SN
R <
1so
met
imes
as in h
um
an h
earing a
bili
ty in a
nois
y en
viro
nm
ent
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
16
Cov
ered
Top
ics
Char
acte
rist
ics
of
Inst
rum
enta
tion
Sim
ple
Inst
rum
ent
Model
Pass
ive
and A
ctiv
e Sen
sors
Cal
ibra
tion
Modifyi
ng a
nd I
nte
rfer
ing I
nputs
Acc
ura
cy a
nd E
rror
Oper
atio
nal
Modes
of
Inst
rum
enta
tion
Def
lect
ion I
nst
rum
ent
Null
Inst
rum
ent
Anal
og a
nd D
igital
Sen
sors
Anal
og a
nd D
igital
Rea
dout
Inst
rum
ents
Input
Imped
ance
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
17
Mea
sure
men
t Char
acte
rist
ics
Defl
ect
ion
In
stru
men
t
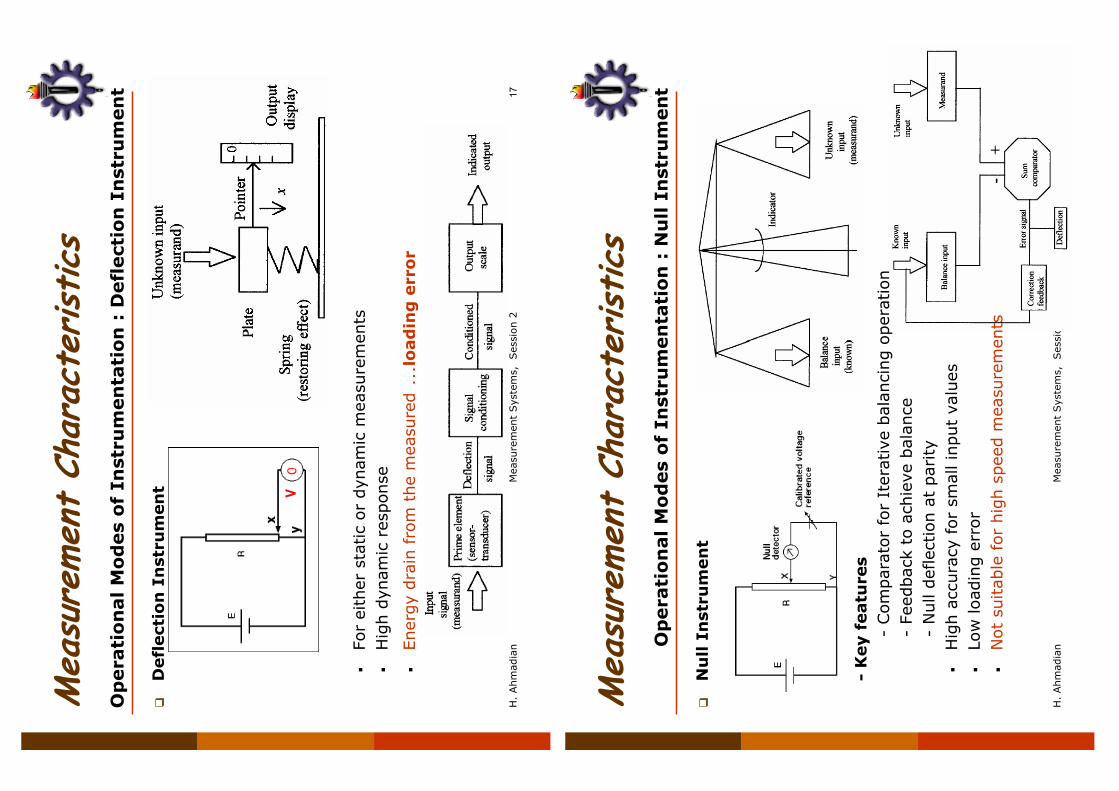
For
eith
er s
tatic
or
dyn
amic
mea
sure
men
ts
Hig
h d
ynam
ic r
esponse
Ener
gy
dra
in fro
m t
he
mea
sure
d…
load
ing
err
or
Op
era
tio
nal M
od
es
of
Inst
rum
en
tati
on
: D
efl
ect
ion
In
stru
men
t
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
18
Mea
sure
men
t Char
acte
rist
ics
Op
era
tio
nal M
od
es
of
Inst
rum
en
tati
on
: N
ull I
nst
rum
en
t
Nu
ll I
nst
rum
en
t
-K
ey f
eatu
res
-Com
par
ator
for
Iter
ativ
e bal
anci
ng o
per
atio
n-
Feed
bac
k to
ach
ieve
bal
ance
-N
ull
def
lect
ion a
t parity
Hig
h a
ccura
cy for
smal
l in
put
valu
esLo
w load
ing e
rror
Not
suitab
le for
hig
h s
pee
d m
easu
rem
ents
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
19
Mea
sure
men
t Char
acte
rist
ics
An
alo
g S
en
sors
-
continuous
in m
agnitude
& t
empora
l (t
ime)
, or
spat
ial (s
pac
e) c
onte
nt
Dig
ital S
en
sor
-D
igital
sig
nal
exi
sts
at d
iscr
ete
valu
es o
f tim
e or
spac
e-bas
ical
ly b
inar
y•
bin
ary
num
ber
ing s
yste
m for
logic
alan
d n
um
ber
ing
info
rmat
ion
•M
-bit d
evic
enum
ber
s (E
x. 0
0,0
1,1
0,1
1)
An
alo
g a
nd
Dig
ital S
en
sors
M 2
-D
iscr
ete
sam
ple
d s
ign
al dis
cret
eoutp
ut
both
in t
ime
or
spac
e &
m
agnitude
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
20
Mea
sure
men
t Char
acte
rist
ics
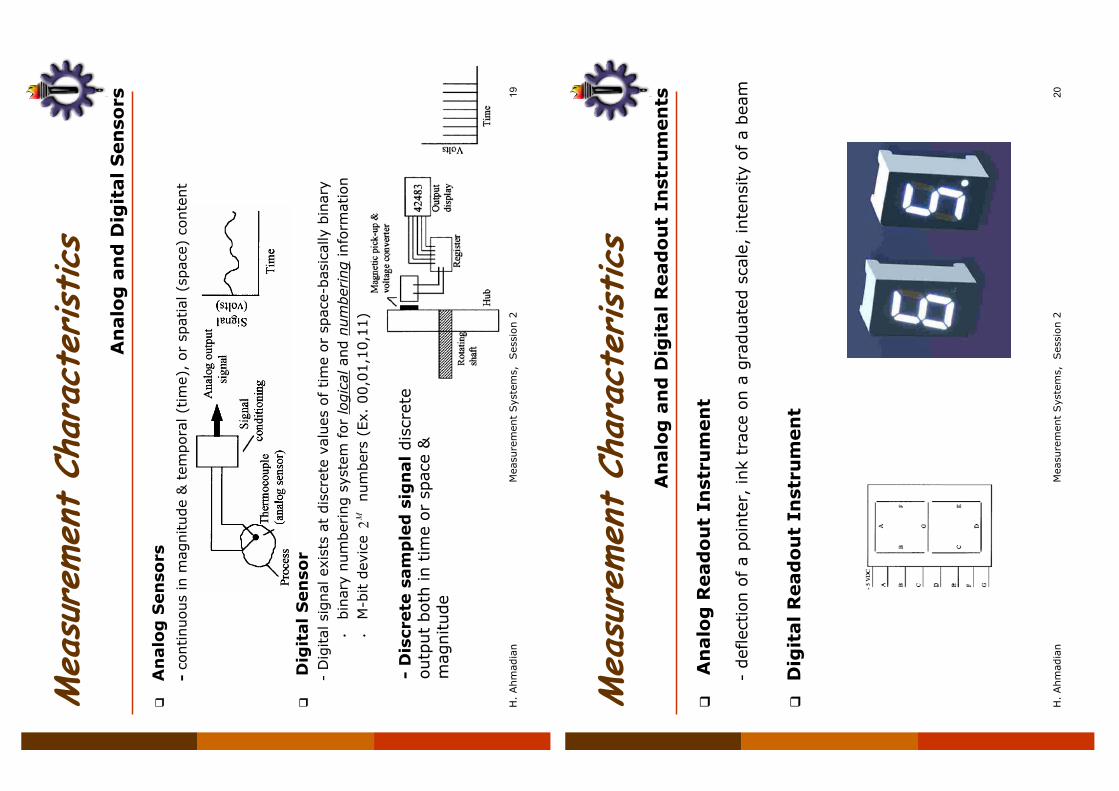
An
alo
g R
ead
ou
t In
stru
men
t
-def
lect
ion o
f a
poin
ter,
ink
trac
e on a
gra
duat
ed s
cale
, in
tensi
ty o
f a
bea
m
Dig
ital
Read
ou
t In
stru
men
t
An
alo
g a
nd
Dig
ital R
ead
ou
t In
stru
men
ts
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
21
Mea
sure
men
t Char
acte
rist
ics
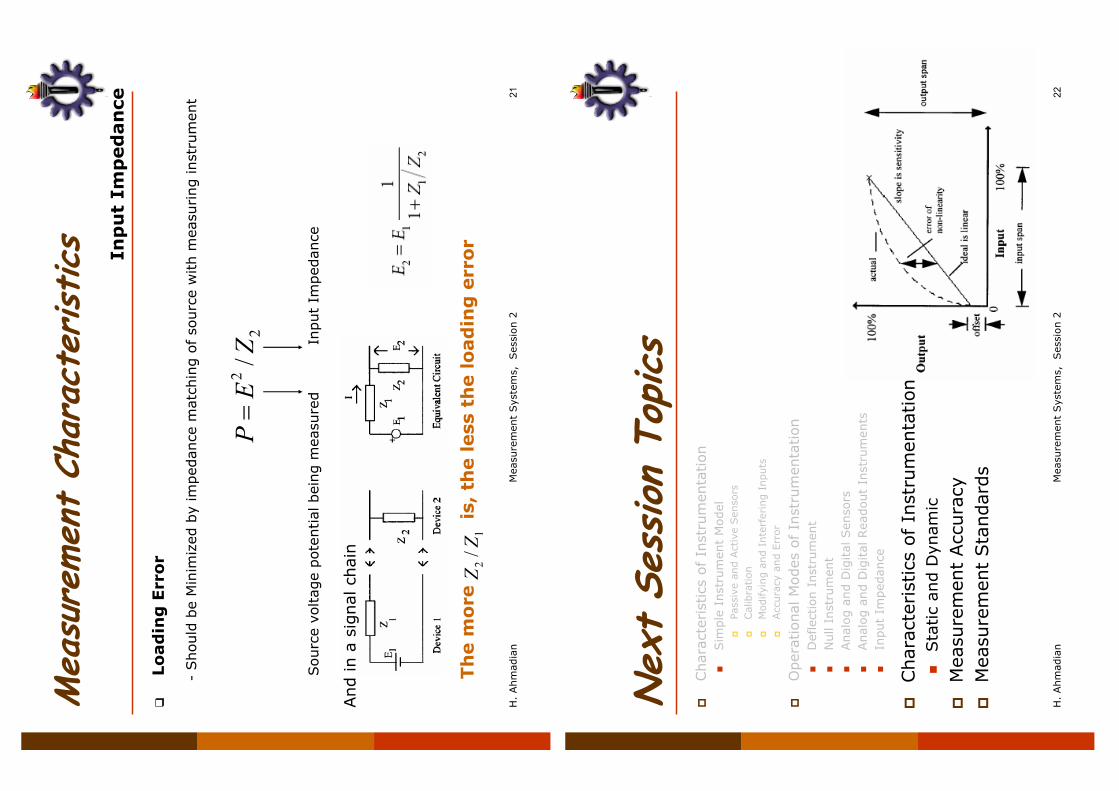
Lo
ad
ing
Err
or
-Should
be
Min
imiz
ed b
y im
ped
ance
mat
chin
g o
f so
urc
e w
ith m
easu
ring inst
rum
ent
And in a
sig
nal
chai
n
22/Z
EP
Inp
ut
Imp
ed
an
ce
Input
Imped
ance
Sourc
e vo
ltag
e pote
ntial
bei
ng m
easu
red
Th
e m
ore
is,
the less
th
e lo
ad
ing
err
or
12/Z
Z
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 2
22
Nex
t Ses
sion
Top
ics
Char
acte
rist
ics
of In
stru
men
tation
Sim
ple
Inst
rum
ent
Model
Pass
ive
and A
ctiv
e Sen
sors
Cal
ibra
tion
Modifyi
ng a
nd I
nte
rfer
ing I
nputs
Acc
ura
cy a
nd E
rror
Oper
atio
nal
Modes
of In
stru
men
tation
Def
lect
ion I
nst
rum
ent
Null
Inst
rum
ent
Anal
og a
nd D
igital
Sen
sors
Anal
og a
nd D
igital
Rea
dout
Inst
rum
ents
Input
Imped
ance
Char
acte
rist
ics
of In
stru
men
tation
Sta
tic
and D
ynam
ic
Mea
sure
men
t Acc
ura
cyM
easu
rem
ent
Sta
ndar
ds
Vib
ration
Mea
sure
men
t Sys
tems
H.A
hm
adia
n
Mea
sure
men
tChar
acte
rist
ics
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
2
Pres
enting
Top
ics
Sta
tic
& D
ynam
ic C
har
acte
rist
ics
of
Inst
rum
enta
tion
Sta
tic
Char
acte
rist
ics
of In
stru
men
t Sys
tem
sO
utp
ut/
Input
Rel
atio
nsh
ipD
rift
Hys
tere
sis
Sat
ura
tion
Bia
sErr
or
of N
onlin
earity
Dyn
amic
Char
acte
rist
ics
of In
stru
men
t Sys
tem
sFo
rcin
g f
unct
ions
Char
acte
rist
ic E
quat
ions
dev
elopm
ent
Res
ponse
of
the
diffe
rent
linea
r sy
stem
s ty
pes
Zer
o o
rder
,1
stord
er,
and
2nd
ord
er b
lock
s
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
3
Mea
sure
men
t Char
acte
rist
ics
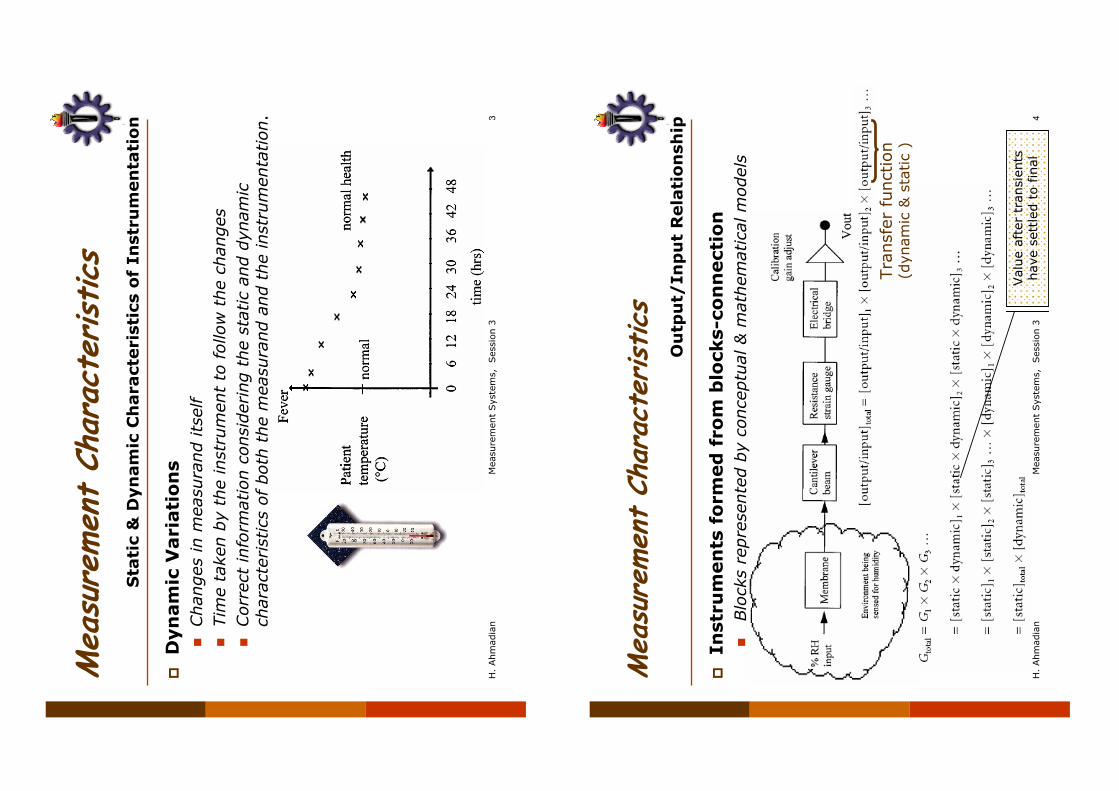
Dyn
am
ic V
ari
ati
on
sChan
ges
in m
easu
rand
itse
lfTim
e ta
ken b
y th
e in
stru
men
t to
follo
w t
he
chan
ges
Corr
ect
info
rmat
ion c
onsi
der
ing t
he
stat
ic a
nd d
ynam
ic
char
acte
rist
ics
of
both
the
mea
sura
nd
and t
he
inst
rum
enta
tion..
Sta
tic
& D
yn
am
ic C
hara
cteri
stic
s o
f In
stru
men
tati
on
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
4
Mea
sure
men
t Char
acte
rist
ics
Ou
tpu
t/In
pu
t R
ela
tio
nsh
ip
Inst
rum
en
ts f
orm
ed
fro
m b
lock
s-co
nn
ect
ion
Blo
cks
repre
sente
d b
y co
nce
ptu
al &
mat
hem
atic
al m
odel
s
Tra
nsf
er f
unct
ion
(dyn
amic
& s
tatic
)
Val
ue
afte
r tr
ansi
ents
hav
e se
ttle
d t
o f
inal
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
5
Mea
sure
men
t Char
acte
rist
ics
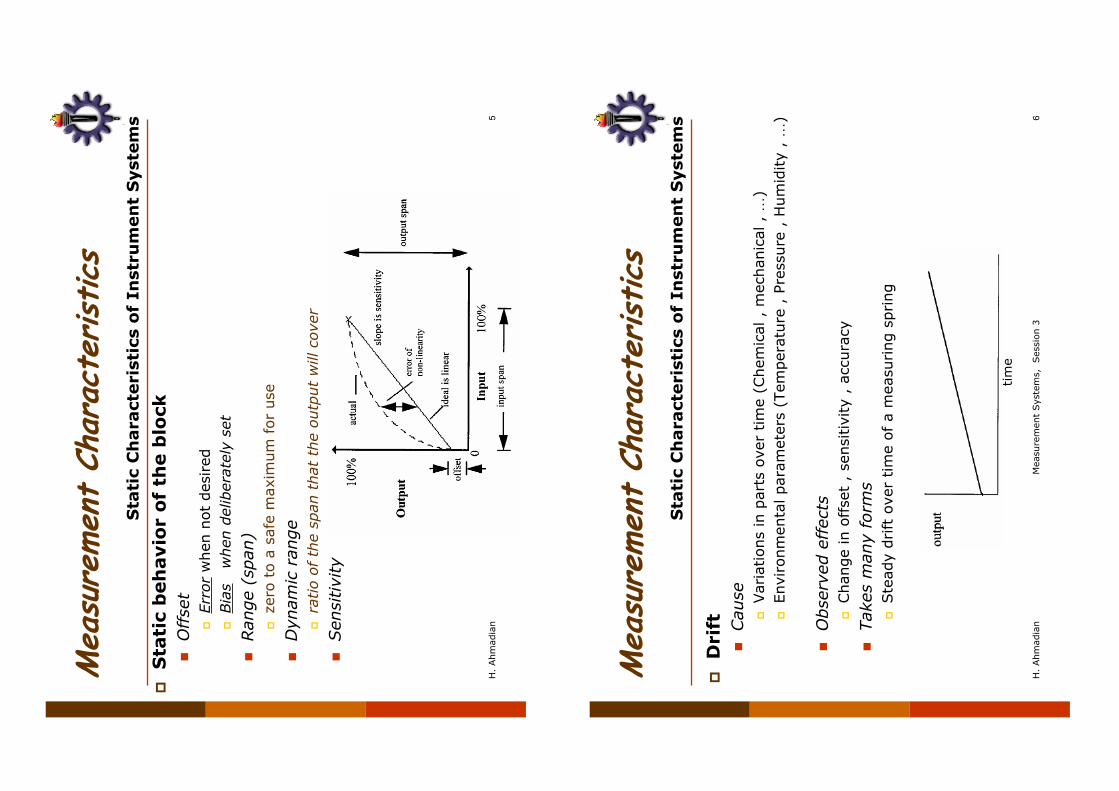
Sta
tic
beh
avio
r o
f th
e b
lock
Off
set
Err
or
when
not
des
ired
Bia
sw
hen
del
iber
atel
y se
t
Ran
ge
(span
)ze
ro t
o a
saf
e m
axim
um
for
use
Dyn
amic
ran
ge
ratio o
f th
e sp
an t
hat
the
outp
ut
will
cove
r
Sen
sitivi
ty
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
6
Mea
sure
men
t Char
acte
rist
ics
Dri
ft Cau
se Var
iations
in p
arts
ove
r tim
e (C
hem
ical
, m
echan
ical
, …
)Envi
ronm
enta
l par
amet
ers
(Tem
per
ature
, P
ress
ure
, H
um
idity
, …
)
Obse
rved
eff
ects
Chan
ge
in o
ffse
t ,
sensi
tivi
ty ,
acc
ura
cy
Tak
es m
any
form
sSte
ady
drift
ove
r tim
e of
a m
easu
ring s
pring
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
tim
e

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
7
Dri
ft(c
ont.
)
Tak
es m
any
form
sel
ectr
onic
am
plif
ier
sett
le b
y tim
e to
fin
al v
alue
afte
r pow
er s
upply
elec
tronic
am
plif
ier
gai
n v
aria
tion w
ith t
emper
ature
of oper
atio
n(d
ue
to c
han
ge
of
elec
tric
al r
esis
tance
)
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
8
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Hyst
ere
sis
diffe
rent
resu
lts
as s
ignal
s va
ry in
direc
tion o
f th
e m
ove
men
tlo
w h
yste
resi
sas
in:
-tr
ansf
orm
er iro
n lam
inat
ions
-cl
ock
spring w
ire

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
9
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Satu
rati
on
Sig
nal
, a
mplif
ied d
iffe
rently
bas
ed o
n g
ain/a
mplit
ude
curv
e
amplif
ying e
lem
ents
only
able
to a
mplif
y one
pola
rity
of si
gnal
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
10
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Satu
rati
on
(cont.
)
signal
too lar
ge
that
the
top is
not
amplif
ied
signal
pas
ses
from
neg
ativ
e to
posi
tive
pola
rity
:cr
oss
ove
rdis
tort
ion

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
11
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Bia
s Nee
d f
or
input
signal
pro
cess
at
a hig
her
ave
rage
valu
eAs
in o
ne
pola
rity
am
plif
icat
ion b
y a
sem
iconduct
or
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
12
Mea
sure
men
t Char
acte
rist
ics
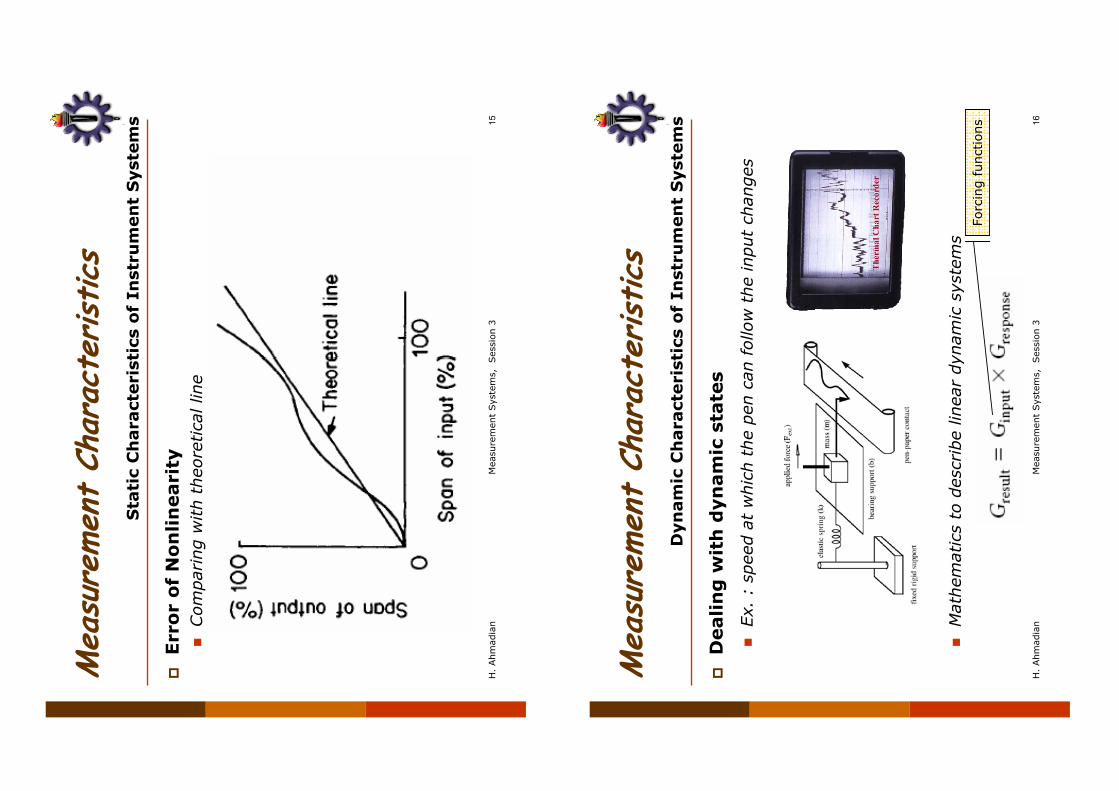
Err
or
of
No
nli
neari
tyLi
nea
rity
:co
nst
ant
gai
n f
or
all le
vels
Err
or
of nonlin
earity
ther
e ex
ist
man
y w
ays
to e
xpre
ss e
rror
of
nonlin
earity
4 m
ethods
are
usu
ally
use
d :
Com
par
ing w
ith b
est
fit
line
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
13
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Err
or
of
No
nli
neari
tyCom
par
ing w
ith b
est
fit
line
thro
ugh z
ero
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
14
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Err
or
of
No
nli
neari
tyCom
par
ing w
ith lin
e jo
inin
g 0
% a
nd 1
00%
poin
ts
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
15
Mea
sure
men
t Char
acte
rist
ics
Sta
tic
Ch
ara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Err
or
of
No
nli
neari
tyCom
par
ing w
ith t
heo
retica
l lin
e
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
16
Mea
sure
men
t Char
acte
rist
ics
Deali
ng
wit
h d
yn
am
ic s
tate
s
Ex.
: s
pee
d a
t w
hic
h t
he
pen
can
follo
w t
he
input
chan
ges
Mat
hem
atic
s to
des
crib
e lin
ear
dyn
amic
sys
tem
s
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
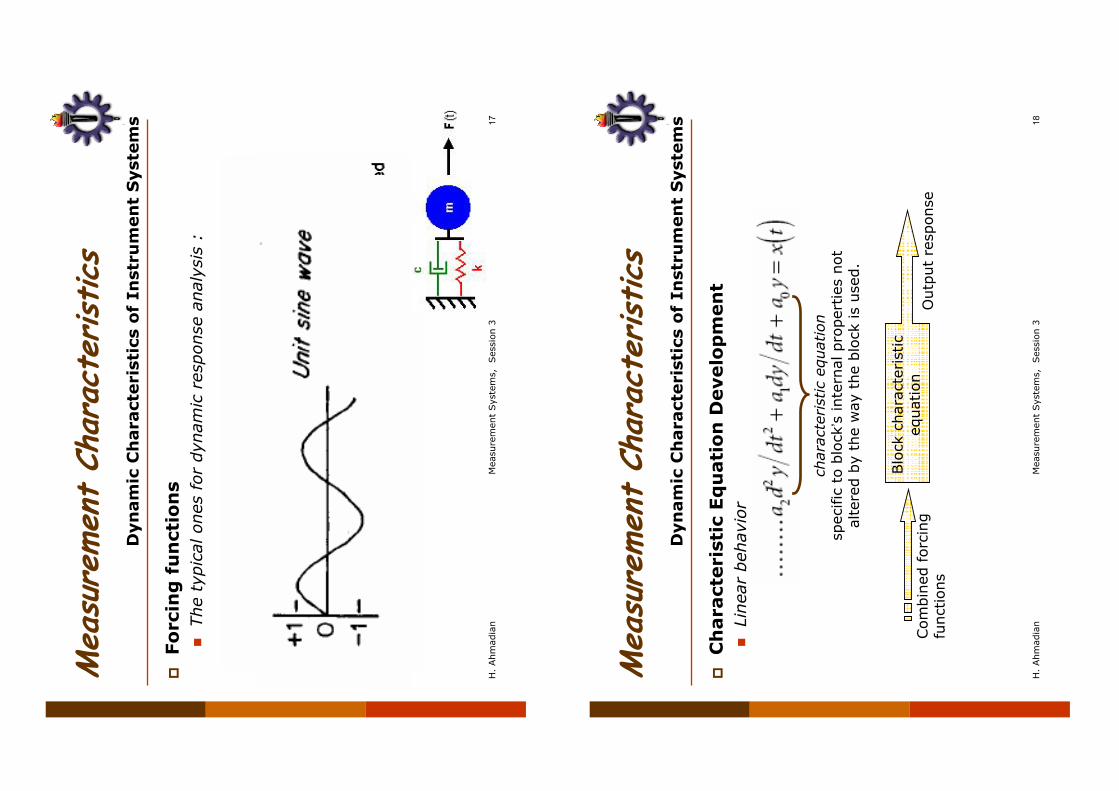
Forc
ing f
unct
ions
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
17
Mea
sure
men
t Char
acte
rist
ics
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Fo
rcin
g f
un
ctio
ns
The
typic
al o
nes
for
dyn
amic
res
ponse
anal
ysis
:
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
18
Mea
sure
men
t Char
acte
rist
ics
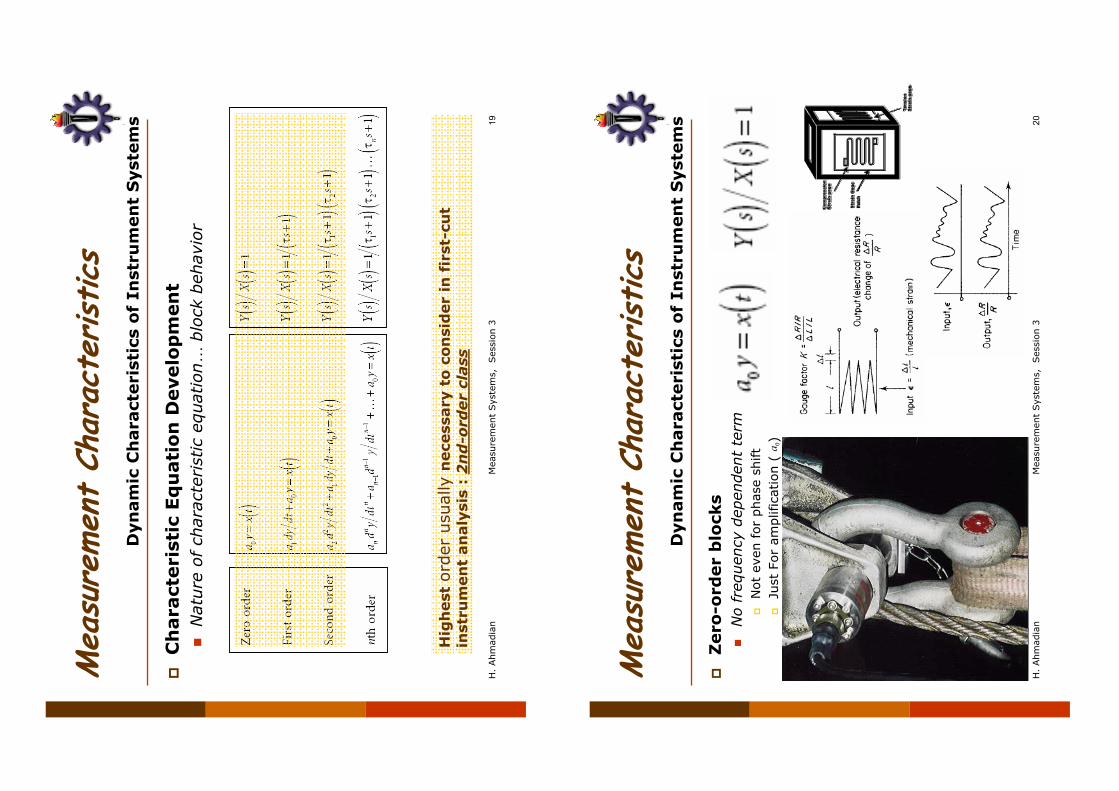
Ch
ara
cteri
stic
Eq
uati
on
Develo
pm
en
tLi
nea
r beh
avio
r
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
char
acte
rist
ic e
quat
ion
spec
ific
to b
lock
’s inte
rnal
pro
per
ties
not
alte
red b
y th
e w
ay t
he
blo
ck is
use
d.
Com
bin
ed f
orc
ing
funct
ions
Blo
ck c
har
acte
rist
ic
equat
ion
Outp
ut
resp
onse
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
19
Mea
sure
men
t Char
acte
rist
ics
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Ch
ara
cteri
stic
Eq
uati
on
Develo
pm
en
tN
ature
of ch
arac
terist
ic e
quat
ion…
blo
ck b
ehav
ior
Hig
hest
ord
er u
sual
lyn
ece
ssary
to
co
nsi
der
in f
irst
-cu
t in
stru
men
t an
aly
sis
: 2
nd
-ord
er
class
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
20
Mea
sure
men
t Char
acte
rist
ics
Zero
-ord
er
blo
cks
No fre
quen
cy d
epen
den
t te
rmN
ot
even
for
phas
e sh
ift
Just
For
amplif
icat
ion (
) 0a
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
21
Mea
sure
men
t Char
acte
rist
ics
Fir
st-o
rder
blo
cks
Tim
e dep
enden
t te
rms
Outp
ut
resp
onse
to s
tep
forc
ing f
unct
ion
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Ste
p a
mplit
ude
Sta
tic
gai
n o
f th
e blo
ck
)1(
)(
/te
AKt
y
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
22
Mea
sure
men
t Char
acte
rist
ics
Fir
st-o
rder
blo
cks
(cont.
)
Outp
ut
resp
onse
to s
ine-
wav
e fo
rcin
g funct
ion
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Eff
ect
s to
be u
nd
ers
too
d w
hen
in
terp
reti
ng
measu
rem
en
t re
sult
s
Sig
nal
fre
quen
cy
)(
tan1
t
Sin
e-w
ave
amplit
ude
Gai
n o
f th
e blo
ck

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
23
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Seco
nd
-ord
er
blo
cks
You r
emem
ber
how
to f
ind t
he
resp
onse
!?
Mea
sure
men
t Char
acte
rist
ics
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
24
Mea
sure
men
t Char
acte
rist
ics
Dyn
am
ic C
hara
cteri
stic
s o
f In
stru
men
t S
yst
em
s
Seco
nd
-ord
er
blo
cks
(cont.
)Ste
p input
Sin
e-w
ave
input
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion 3
25
Cov
ered
Top
ics
Sta
tic
& D
ynam
ic C
har
acte
rist
ics
of
Inst
rum
enta
tion
Sta
tic
Char
acte
rist
ics
of In
stru
men
t Sys
tem
sO
utp
ut/
Input
Rel
atio
nsh
ipD
rift
Hys
tere
sis
Sat
ura
tion
Bia
sErr
or
of N
onlin
earity
Dyn
amic
Char
acte
rist
ics
of In
stru
men
t Sys
tem
sFo
rcin
g f
unct
ions
Char
acte
rist
ic E
quat
ions
dev
elopm
ent
Res
ponse
of
the
diffe
rent
linea
r sy
stem
s ty
pes
Zer
o o
rder
,1
stord
er,
and
2nd
ord
er b
lock
s
Mea
sure
men
t S
yste
ms
H.A
hm
adia
n
Mea
sure
men
tChar
acte
rist
ics
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
2
Prese
nting
Top
ics:
Mea
sure
men
t Acc
ura
cyErr
or:
The
Norm
al D
istr
ibution a
nd t
he
Uniform
D
istr
ibution
Unce
rtai
nty
(Acc
ura
cy)
Mea
sure
men
t U
nce
rtai
nty
Model
Cal
cula
tion o
f Tota
l U
nce
rtai
nty
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
3
Measu
rement
Acc
uracy
Acc
ura
cy is
mer
ely
an o
ptim
istic
word
for
erro
r, t
he
diffe
rence
bet
wee
n t
he
outp
ut
of
a m
easu
rem
ent
syst
em a
nd t
he
true
valu
e :
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
4
Measu
rement
Acc
uracy
Imag
ine
a te
st t
o e
xam
ine
the
beh
avio
r of
a w
ing
spar
.A p
osi
tion s
enso
r on t
he
spar
rec
ord
s th
e si
gnal
fro
m it
at c
ruis
ing c
onditio
ns.
What
do t
he
mea
sure
men
ts m
ean?
Do t
he
say
anyt
hin
g a
bout
the
aver
age
load
on t
he
spar
?Is
the
spar
vib
rating e
xces
sive
ly?
Could
it
be
in d
anger
of
dev
elopin
g a
fra
cture
?
To a
nsw
er t
hes
e ques
tions
does
not
just
req
uire
a phys
ical
and t
heo
retica
l under
stan
din
g o
f th
e si
tuat
ion b
ut
also
som
e an
alys
is o
f th
e m
easu
rem
ents
mad
e.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
5
Measu
rement
Acc
uracy
In t
hes
e si
tuat
ions
a good f
irst
ste
p w
ould
be
to c
alcu
late
the
mea
n a
nd s
tandar
d
dev
iation o
f th
e m
easu
rem
ents
:
Note
that
the
stan
dar
d d
evia
tion is
calc
ula
ted d
ivid
ing
by
N-1
rath
er t
han
N.
This
is
bec
ause
only
N-1
of th
e sa
mple
s ar
e in
dep
enden
t of th
e m
ean.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
6
Measu
rement
Acc
uracy
The
mea
n o
f si
gnal
:W
ould
be
the
aver
age
def
lect
ion o
f th
e sp
ar.
Could
be
use
d t
o e
stim
ate
its
aver
age
load
.
The
stan
dar
d d
evia
tion o
r va
rian
ce a
re:
Mea
sure
s of
how
wid
ely
the
mea
sure
men
ts a
re
spre
ad a
round t
he
mea
nThey
could
be
take
n a
s in
dic
atio
ns
of
the
inte
nsi
ty o
f vi
bra
tions
in t
he
spar
.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
7
Measu
rement
Acc
uracy
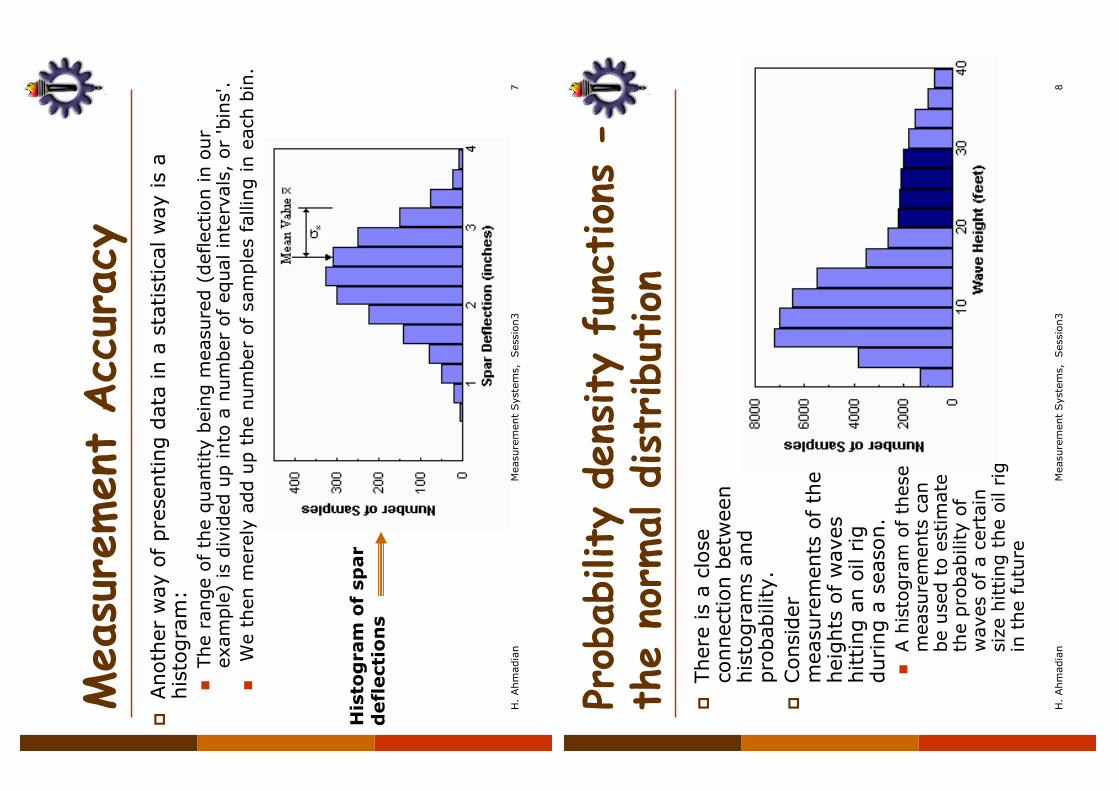
Anoth
er w
ay o
f pre
senting d
ata
in a
sta
tist
ical
way
is
a his
togra
m:
The
range
of
the
quan
tity
bei
ng m
easu
red (
def
lect
ion in o
ur
exam
ple
) is
div
ided
up into
a n
um
ber
of
equal
inte
rval
s, o
r 'b
ins'
.W
e th
en m
erel
y ad
d u
p t
he
num
ber
of
sam
ple
s fa
lling in e
ach b
in.
His
tog
ram
of
spar
defl
ect
ion
s
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
8
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
Ther
e is
a c
lose
co
nnec
tion b
etw
een
his
togra
ms
and
pro
bab
ility
.Consi
der
mea
sure
men
ts o
f th
e hei
ghts
of w
aves
hitting a
n o
il rig
during a
sea
son.
A h
isto
gra
m o
f th
ese
mea
sure
men
ts c
an
be
use
d t
o e
stim
ate
the
pro
bab
ility
of
wav
es o
f a
cert
ain
size
hitting t
he
oil
rig
in t
he
futu
re
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
9
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
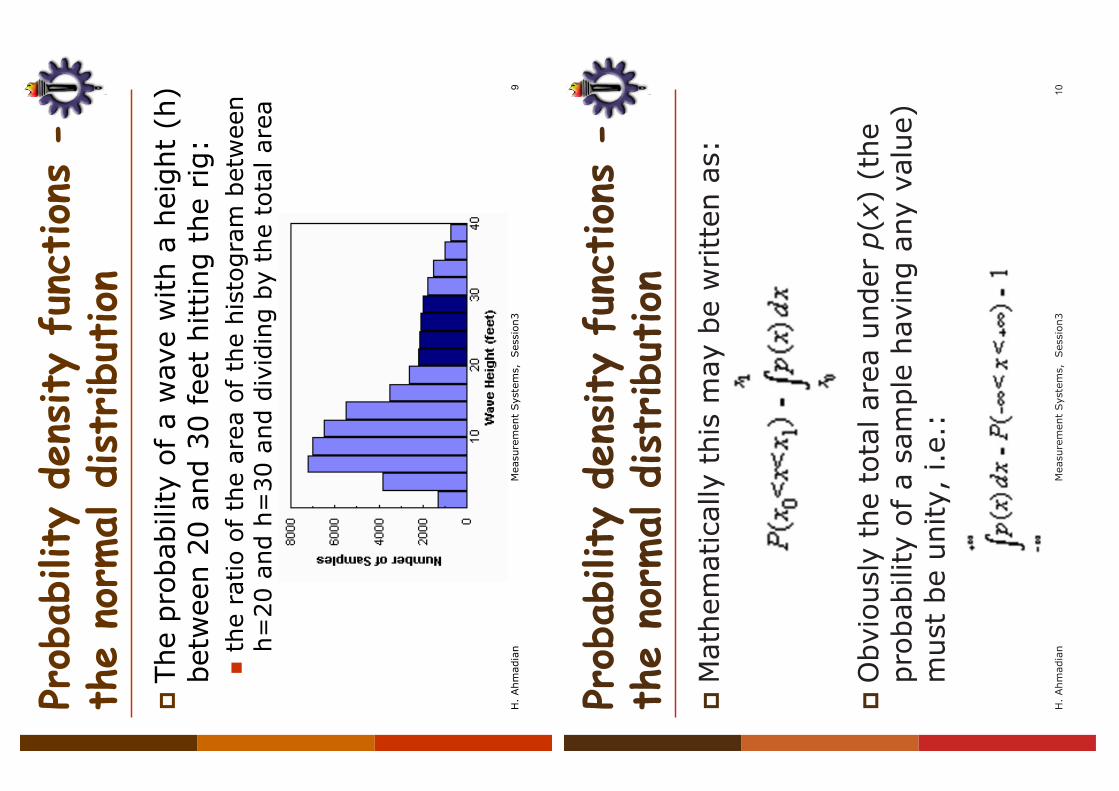
The
pro
bab
ility
of
a w
ave
with a
hei
ght
(h)
bet
wee
n 2
0 a
nd 3
0 fee
t hitting t
he
rig:
the
ratio o
f th
e ar
ea o
f th
e his
togra
m b
etw
een
h=
20 a
nd h
=30 a
nd d
ivid
ing b
y th
e to
tal ar
ea
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
10
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
Mat
hem
atic
ally
this
may
be
writt
en a
s:
Obvi
ousl
y th
e to
tal ar
ea u
nder
p(x
) (t
he
pro
bab
ility
of
a sa
mple
hav
ing a
ny
valu
e)
must
be
unity,
i.e
.:
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
11
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
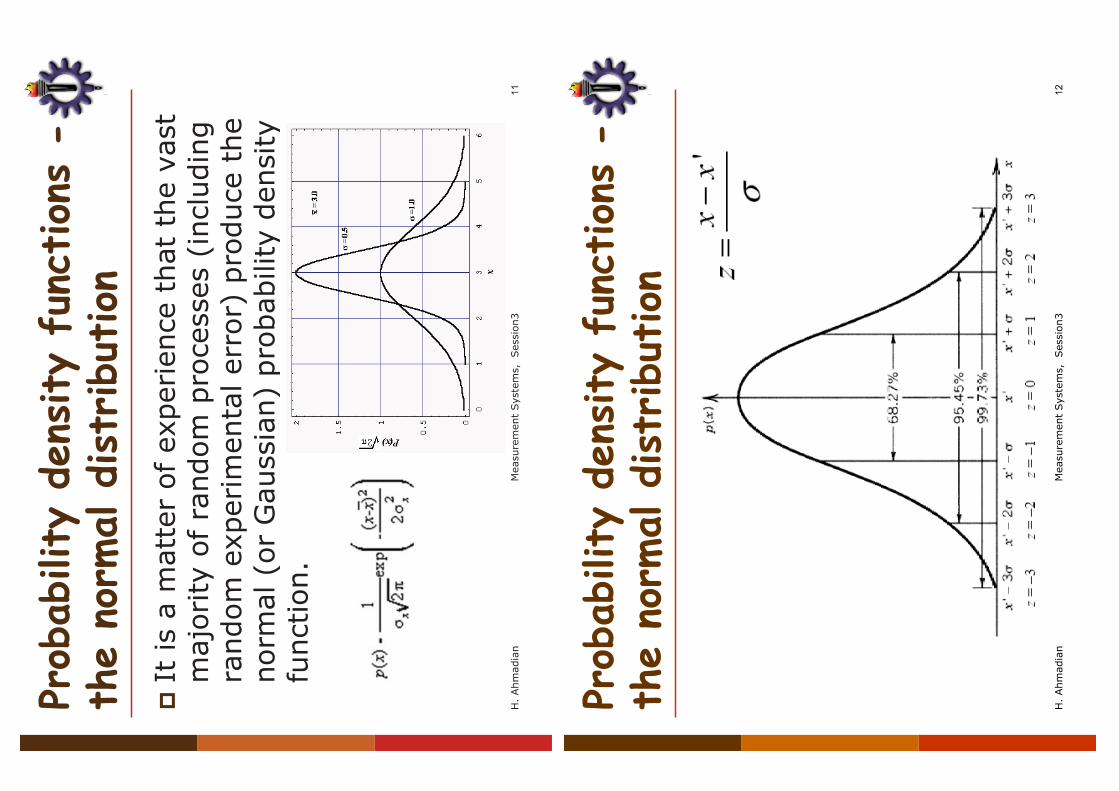
It is
a m
atte
r of
exper
ience
that
the
vast
m
ajority
of
random
pro
cess
es (
incl
udin
g
random
exp
erim
enta
l er
ror)
pro
duce
the
norm
al (
or
Gau
ssia
n)
pro
bab
ility
den
sity
fu
nct
ion.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
12
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
13
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
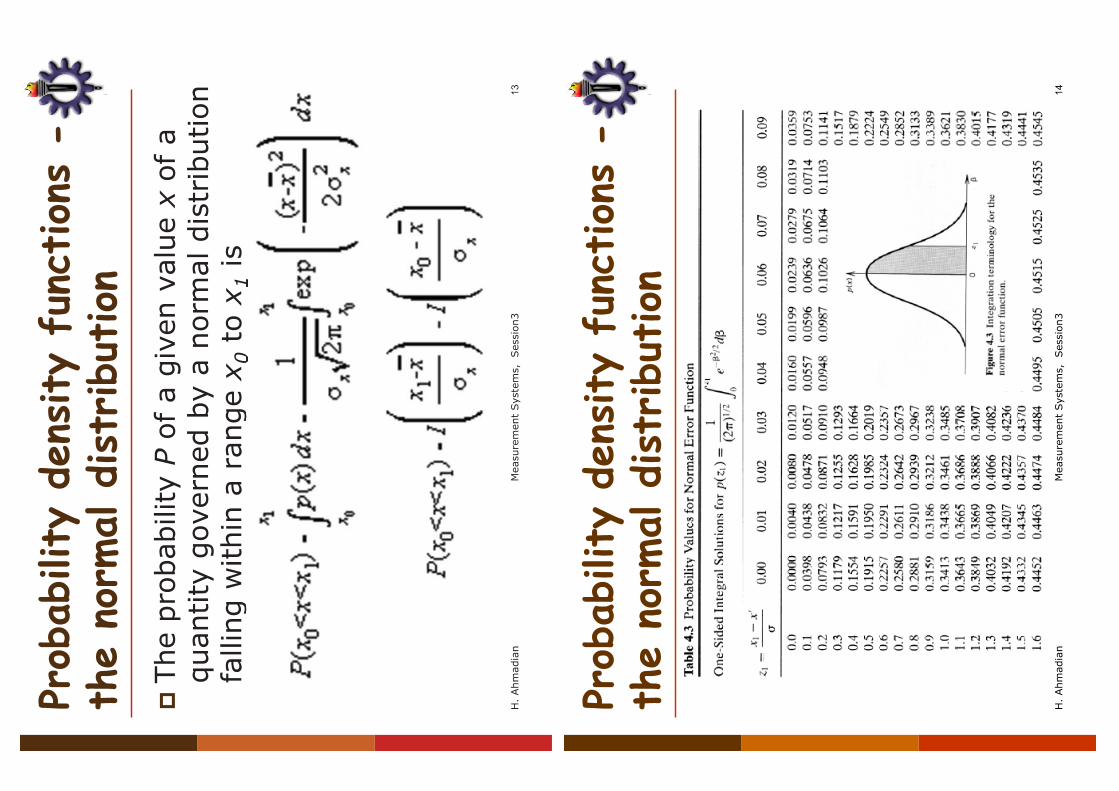
The
pro
bab
ility
Pof
a giv
en v
alue
xof
a quan
tity
gove
rned
by
a norm
al d
istr
ibution
falli
ng w
ithin
a r
ange
x 0to
x 1is
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
14
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
15
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
Exam
ple
A s
enso
r is
use
d t
o d
etec
t th
e flow
ra
te o
f fu
el t
o a
jet
engin
e. T
he
follo
win
g a
re
21 s
uch
rea
din
gs
(in a
rbitra
ry u
nits)
,
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
16
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
Det
erm
ine
the
mea
n a
nd s
tandar
d d
evia
tion:
Cal
cula
te t
he
pro
bab
ility
that
a r
eadin
g t
aken
at
ran
dom
will
hav
e a
valu
e bet
wee
n .
5 a
nd .
7
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
17
Prob
ability d
ens
ity f
unct
ions
-th
e n
ormal distr
ibut
ion
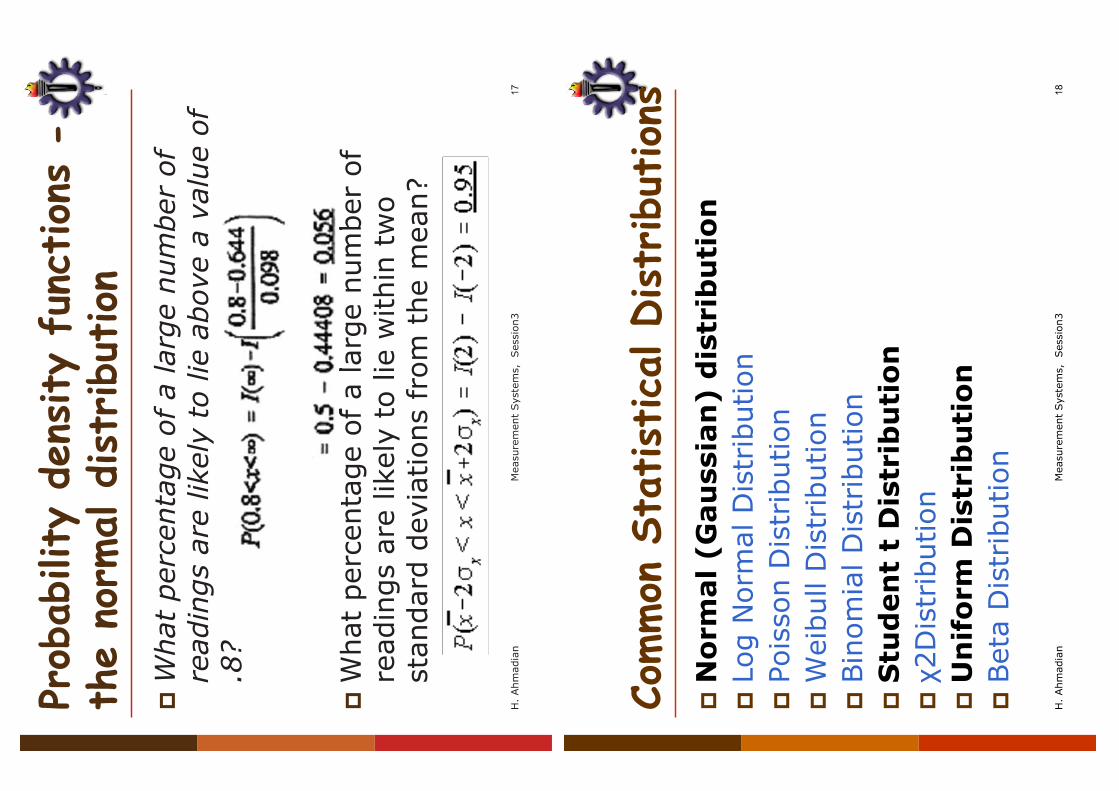
What
per
centa
ge
of
a la
rge
num
ber
of
read
ings
are
likel
y to
lie
above
a v
alue
of
.8?
What
per
centa
ge
of
a la
rge
num
ber
of
read
ings
are
likel
y to
lie
within
tw
o
stan
dar
d d
evia
tions
from
the
mea
n?
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
18
Com
mon
Sta
tist
ical Distr
ibut
ions
No
rmal
(Gau
ssia
n)
dis
trib
uti
on
Log N
orm
al D
istr
ibution
Pois
son D
istr
ibution
Wei
bull
Dis
trib
ution
Bin
om
ial D
istr
ibution
Stu
den
t t
Dis
trib
uti
on
2D
istr
ibution
Un
ifo
rm D
istr
ibu
tio
nBet
a D
istr
ibution
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
19
Unc
ert
ainty
Ana
lysis
It is
esse
ntial
that
the
engin
eer
hav
e a
good
idea
of
the
likel
y ac
cura
cy o
f th
e dat
a.Est
imat
es o
f ex
per
imen
tal ac
cura
cy a
re
refe
rred
to a
s 'U
nce
rtain
ty E
stim
ate
s'An u
nce
rtai
nty
inte
rval
def
ines
a s
ymm
etrica
l ban
d a
round a
mea
sure
men
t.Id
eally
it
should
be
chose
n s
o t
hat
ther
e is
a 9
5%
pro
bab
ility
that
the
true
valu
e lie
s w
ithin
it.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
20
Unc
ert
ainty
Ana
lysis
On g
ener
al,
unce
rtai
nty
anal
ysis
may
be
div
ided
into
tw
o p
arts
: U
nce
rtain
ty i
n p
rim
ary
measu
rem
en
ts,
A p
rim
ary
mea
sure
men
t is
one
that
is
not
der
ived
fr
om
any
oth
er,
e.g.
voltag
e fr
om
a v
oltm
eter
, te
mper
ature
fro
m a
ther
mom
eter
, hea
d fro
m a
m
anom
eter
, dis
tance
fro
m a
dia
l gag
e et
c
Un
cert
ain
ty i
n a
resu
ltder
ived
fro
m t
hose
m
easu
rem
ents
.

H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
21
Dete
rmining
the u
ncert
ainty
in
prim
ary
measu
rement
s
Invo
lves
mak
ing a
n e
duca
ted g
ues
s bas
ed o
n
seve
ral so
urc
es o
f in
form
atio
n:
1.
Dig
ital
res
olu
tion,
size
of sm
alle
st d
ivis
ions
in s
cale
. The
low
est
poss
ible
unce
rtai
nty
is
hal
f th
e dig
ital
res
olu
tion.
2.
Man
ufa
cture
rs info
rmat
ion,
calib
ration info
rmat
ion.
3.
Rep
eate
d m
easu
rem
ents
of th
e sa
me
quan
tity
4.
Com
par
ison w
ith o
ther
indep
enden
t m
easu
rem
ents
of th
e sa
me
quan
tity
5.
Oth
er fac
tors
, va
lidity
of th
e m
easu
rem
ent
schem
e e.
g.
oper
atin
g a
n inst
rum
ent
outs
ide
its
des
ign r
ange
6.
Exp
erie
nce
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
22
Dete
rmining
the u
ncert
ainty
in
a r
esu
lt
In g
ener
al e
xper
imen
tal dat
a is
pro
cess
ed
to g
ener
ate
resu
lts.
The
connec
tion b
etw
een t
he
raw
prim
ary
mea
sure
men
tsan
d t
he
resu
lts
is a
lway
s a
mat
hem
atic
al f
unct
ion o
f so
me
kind
The
unce
rtai
nty
in R
resu
ltin
g f
rom
the
unce
rtai
nties
in a
,b,
c
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
23
Exam
ple:
Pow
er
dissipa
ted in
a
resist
or
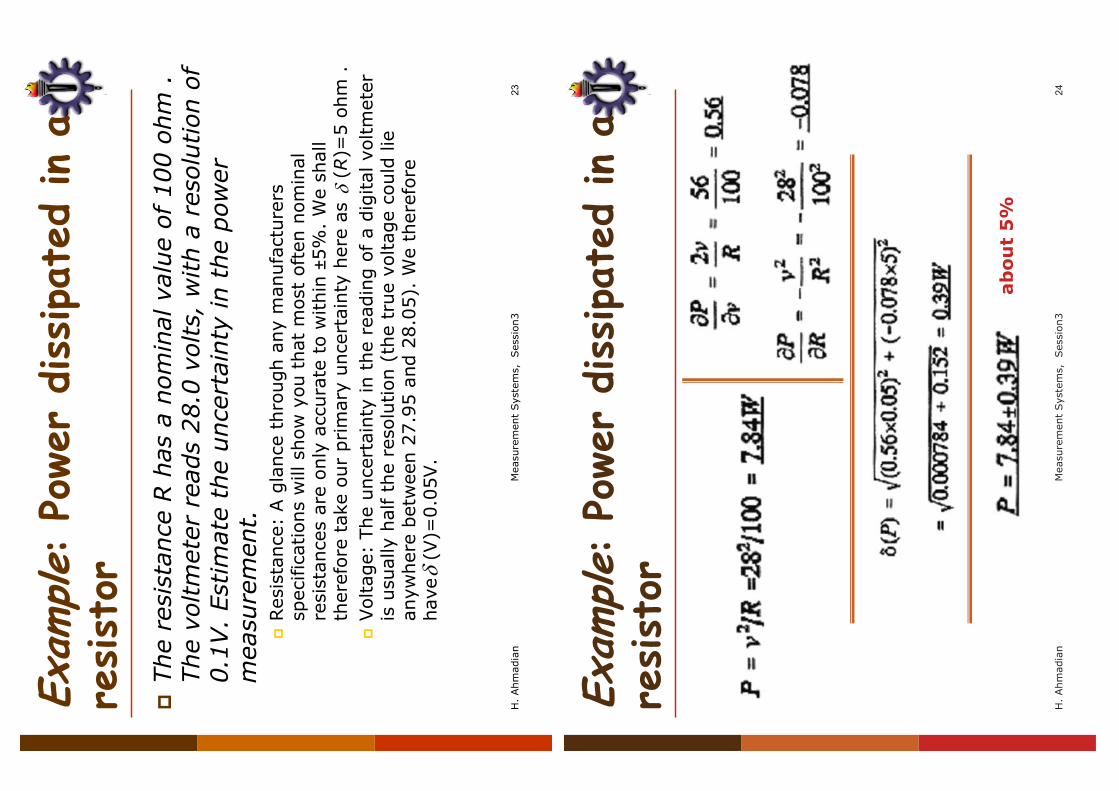
The
resi
stan
ce R
has
a n
om
inal
val
ue
of
100 o
hm
.
The
voltm
eter
rea
ds
28.0
volts,
with a
res
olu
tion o
f 0.1
V.
Est
imat
e th
e unce
rtai
nty
in t
he
pow
er
mea
sure
men
t.Res
ista
nce
: A g
lance
thro
ugh a
ny
man
ufa
cture
rs
spec
ific
atio
ns
will
show
you t
hat
most
oft
en n
om
inal
re
sist
ance
s ar
e only
acc
ura
te t
o w
ithin
±5%
. W
e sh
all
ther
efore
tak
e our
prim
ary
unce
rtai
nty
her
e as
(R)=
5 o
hm
.
Voltag
e: T
he
unce
rtai
nty
in t
he
read
ing o
f a
dig
ital
voltm
eter
is
usu
ally
hal
f th
e re
solu
tion (
the
true
voltag
e co
uld
lie
an
ywher
e bet
wee
n 2
7.9
5 a
nd 2
8.0
5).
We
ther
efore
hav
e(V
)=0.0
5V.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
24
Exam
ple:
Pow
er
dissipa
ted in
a
resist
or
ab
ou
t 5
%
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
25
Exam
ple:
Pow
er
dissipa
ted in
a
resist
or
This
anal
ysis
show
s th
at t
he
likel
y er
ror
in
our
pow
er m
easu
rem
ent
is a
lmost
entire
ly
due
to t
he
unce
rtai
nty
in r
esis
tance
. To im
pro
ve t
he
accu
racy
we
should
co
nce
ntr
ate
on r
educi
ng t
he
unce
rtai
nty
of
the
resi
stan
ce m
easu
rem
ent,
not
on
impro
ving t
he
voltm
eter
. This
kin
d o
f in
form
atio
n c
an s
ave
a lo
t of
tim
e an
d m
oney
(vo
ltm
eter
s ar
e ex
pen
sive
, re
sist
ors
are
not)
.
H.
Ahm
adia
nM
easu
rem
ent
Sys
tem
s,
Ses
sion3
26
Cov
ere
d T
opics:
Mea
sure
men
t Acc
ura
cyErr
or:
The
Norm
al D
istr
ibution a
nd t
he
Uniform
D
istr
ibution
Unce
rtai
nty
(Acc
ura
cy)
Mea
sure
men
t U
nce
rtai
nty
Model
Cal
cula
tion o
f Tota
l U
nce
rtai
nty
Measurement Systems
H.Ahmadian
MeasurementCharacteristics
H. Ahmadian Measurement Systems, Session4 2
Measurement StandardsStandard is a unit of known quantity or dimension to which other measurement units can be compared.
A Historical PerspectiveWhat Are Standards?
Standards of Practice (Protocol Standards) • Legal Metrology •Forensic Metrology • Standard Reference Materials
A Conceptual Basis of MeasurementsThe Need for StandardsTypes of Standards
Basic or Fundamental Standards • Derived Standards • TheMeasurement Assurance System
Numbers, Dimensions, and UnitsMultiplication Factors
H. Ahmadian Measurement Systems, Session4 3
A Historical PerspectiveMany early standards were based on the human body:
Length of man’s hand, Width of his thumb,Distance between outstretched fingertips, Length of one’s foot,…
The logical person to impose a single standard was the ruler of the country
12-inch or other short measuring stick is still called a ruler.
This right has since been assumed by all governments.
H. Ahmadian Measurement Systems, Session4 4
A Historical PerspectiveStandards defined by regional authorities, often caused problems in commerce and early scientific investigation.In 1790, the French National Assemblydirected the French Academy of Sciencesto “deduce an invariable standard for all measures and all the weights”
The Academy proposed the metric system,Unit of length in terms of the earth’s circumference.Units of volume and mass derived from the unit of lengthAll multiples of each unit be a multiple of 10.

H. Ahmadian Measurement Systems, Session4 5
A Historical PerspectiveIn 1875, the 17 countries signed the “Treaty of the Meter,”
It also established an International Bureau of Weights and Measures (BIPM)The BIPM assigned system of units by meter and kilogram called the Système International d’Unités (SI).
As the level of scientific sophistication improved, the basis for the measurement system changed dramatically.
Attempts were made to base them on “natural” phenomena:The second was defined as 1/86,400th of a mean solar day.The meter is the distance that light travels in an exactly defined fraction of a second (the speed of light in a vacuum is now defined as a constant of nature).
H. Ahmadian Measurement Systems, Session4 6
What Are Standards?There are several kinds of standards:
“measurement standards,”“standards of practice or protocol standards”
Produced by the various standards bodies:International Organization for Standardization (ISO), International Electrotechnical Commission (IEC), American National Standards Institute (ANSI),Institute of Standards & Industrial Research of Iran (ISIRI)
H. Ahmadian Measurement Systems, Session4 7
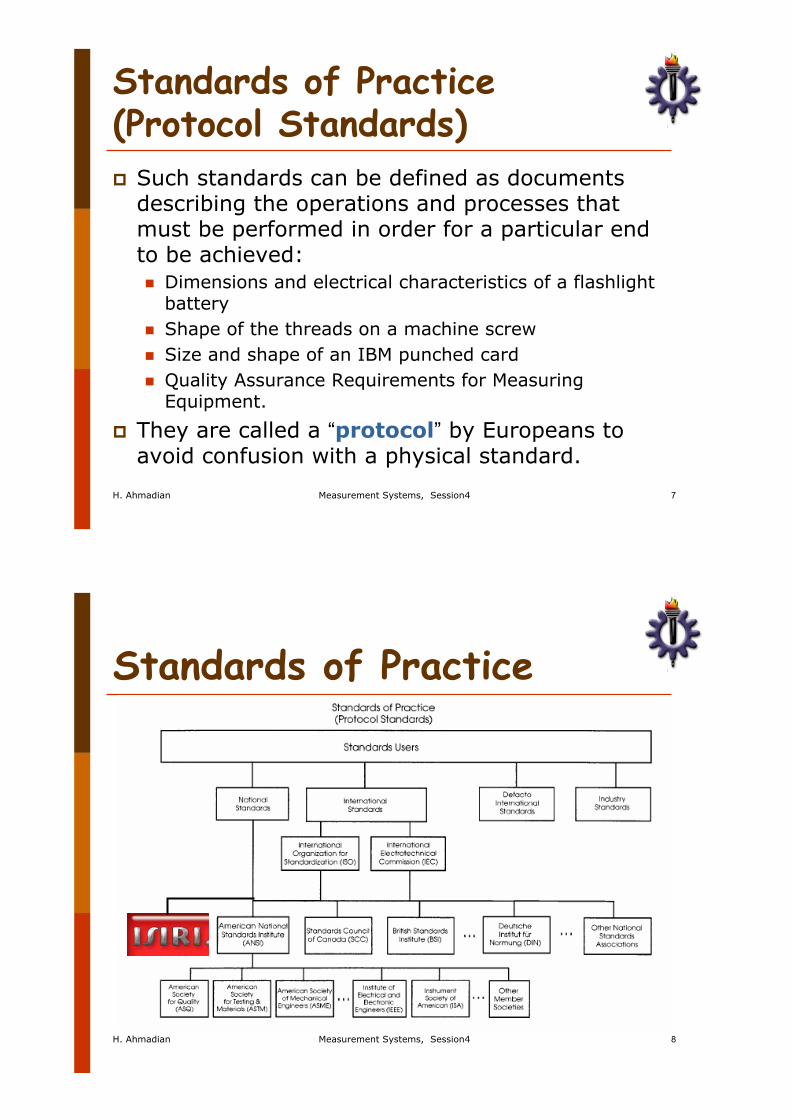
Standards of Practice (Protocol Standards)
Such standards can be defined as documents describing the operations and processes that must be performed in order for a particular end to be achieved:
Dimensions and electrical characteristics of a flashlight batteryShape of the threads on a machine screw Size and shape of an IBM punched card Quality Assurance Requirements for Measuring Equipment.
They are called a “protocol” by Europeans to avoid confusion with a physical standard.
H. Ahmadian Measurement Systems, Session4 8
Standards of Practice

H. Ahmadian Measurement Systems, Session4 9
Legal MetrologyLegal Metrology: application of measurement standards to the control of the daily transactions of trade and commerce
It is more commonly known as Weights and Measures.
Internationally, coordination among nations on Legal Metrology matters is, by the International Organization for Legal Metrology (OIML).Domestic uniformity in legal metrology matters is the responsibility of National Institute of Standards of each country.
H. Ahmadian Measurement Systems, Session4 10
Forensic Metrology
Forensic Metrology: Application of measurements and hence measurement standards to the solution and prevention of crime.It is practiced within the laboratories of law enforcement agencies throughout the world.Worldwide activities in Forensic Metrology are coordinated by Interpol.
H. Ahmadian Measurement Systems, Session4 11
Standard Reference Materials (SRM)
Discrete quantities of substances or minor artifacts that have been certified as to their composition, purity, concentration, or some other characteristic. Useful in the calibration of the measurement devices and the measurement processes normally used in the process control of those substances.The essential calibration standards in stoichiometry.
H. Ahmadian Measurement Systems, Session4 12
A Conceptual Basis of MeasurementsIn order to achieve quality/to do things right:
It is necessary to make some decisionsCorrect decisions needs good numerical data on which to base those decisions.Those numerical data must come from measurements and they must be based on the “right” numbers.The only way to get “good” numerical data is to make accurate measurements using calibrated instruments that have been properly utilized.If it is important to compare those measurements to other measurements made at other places and other times, the instruments must be calibrated using traceable standards.

H. Ahmadian Measurement Systems, Session4 13
The Need for StandardsStandards define the units and scales in use, and Allow comparison of measurements made in different times and places.
In any commercial transaction there is need to agree on the units, conditions, and method(s) of measurement to be used.
Daily measurement needs use lower-level standards that can be checked against those national or international standards.This chain of calibrations or checking is called “traceability”.A proper chain of traceability must include a statement of uncertainty at every step.
H. Ahmadian Measurement Systems, Session4 14
Types of Standards
Basic or Fundamental StandardsIn the SI system, there are seven basic measurement units from which all other units are derived.

H. Ahmadian Measurement Systems, Session4 15
Types of Standards
Derived StandardsAll of the other units are derived from the seven basic units
H. Ahmadian Measurement Systems, Session4 16
The Measurement Assurance System

H. Ahmadian Measurement Systems, Session4 17
Numbers, Dimensions, and Units
A measurement is always expressed as a multiple (or submultiple) of some unit quantity.
Amperes, milliamperes or even microamperes.
Multiplication factors has been defined used in conjunction with the units to them to a more reasonable size.
H. Ahmadian Measurement Systems, Session4 18
Multiplication Factors
Vibration Measurement Systems
H.Ahmadian
VibrationTransducers
H. Ahmadian Measurement Systems, 2
Covering TopicsVibration Transducers
Ch 17, Measurement, Instrumentation, and Sensors HandbookIntroduction Acceleration, Vibration and Shock MeasurementAccelerometer DynamicsElectromechanical Force-Balance (Servo) AccelerometersPiezoelectric AccelerometersPiezoresistive AccelerometersDifferential-Capacitance AccelerometersStrain-Gage AccelerometersSeismic AccelerometersInertial Types, Cantilever, and Suspended-Mass ConfigurationElectrostatic Force Feedback AccelerometersMicroaccelerometersCross-Axis SensitivitySelection, Full-Scale Range, and Overload CapabilitySignal Conditioning
H. Ahmadian Measurement Systems, 3
Transducers
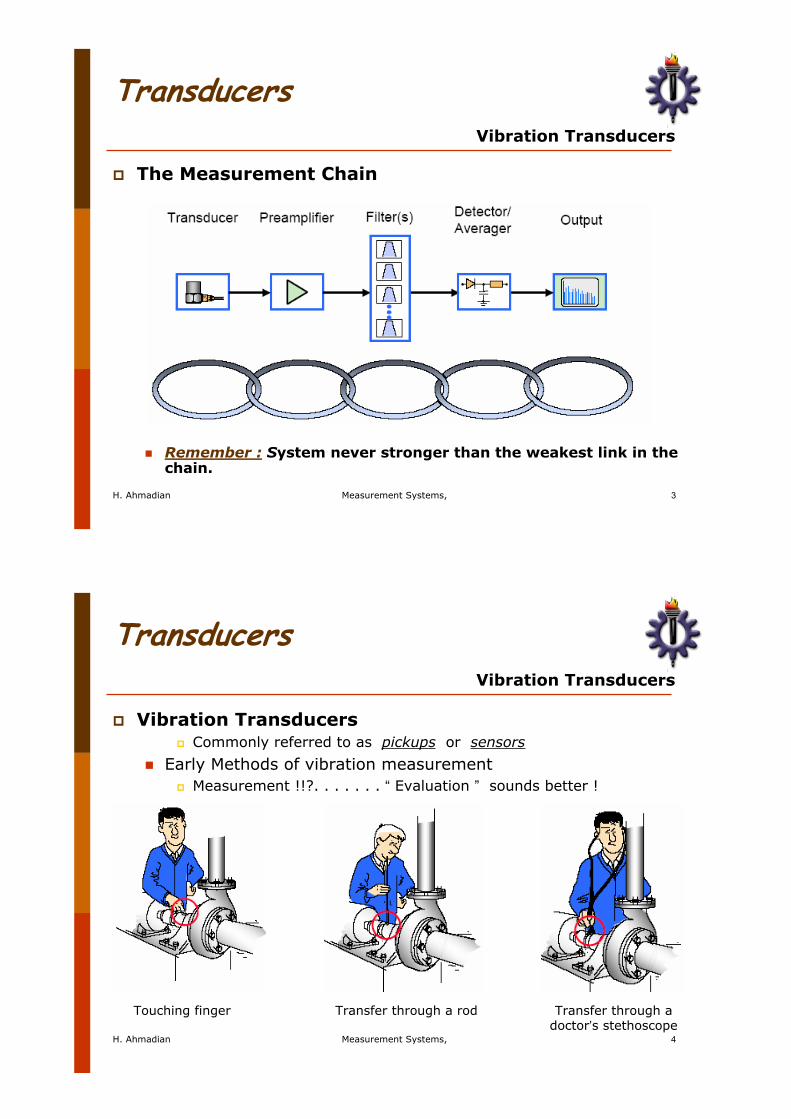
The Measurement Chain
Remember : System never stronger than the weakest link in the chain.
Vibration Transducers
H. Ahmadian Measurement Systems, 4
Transducers
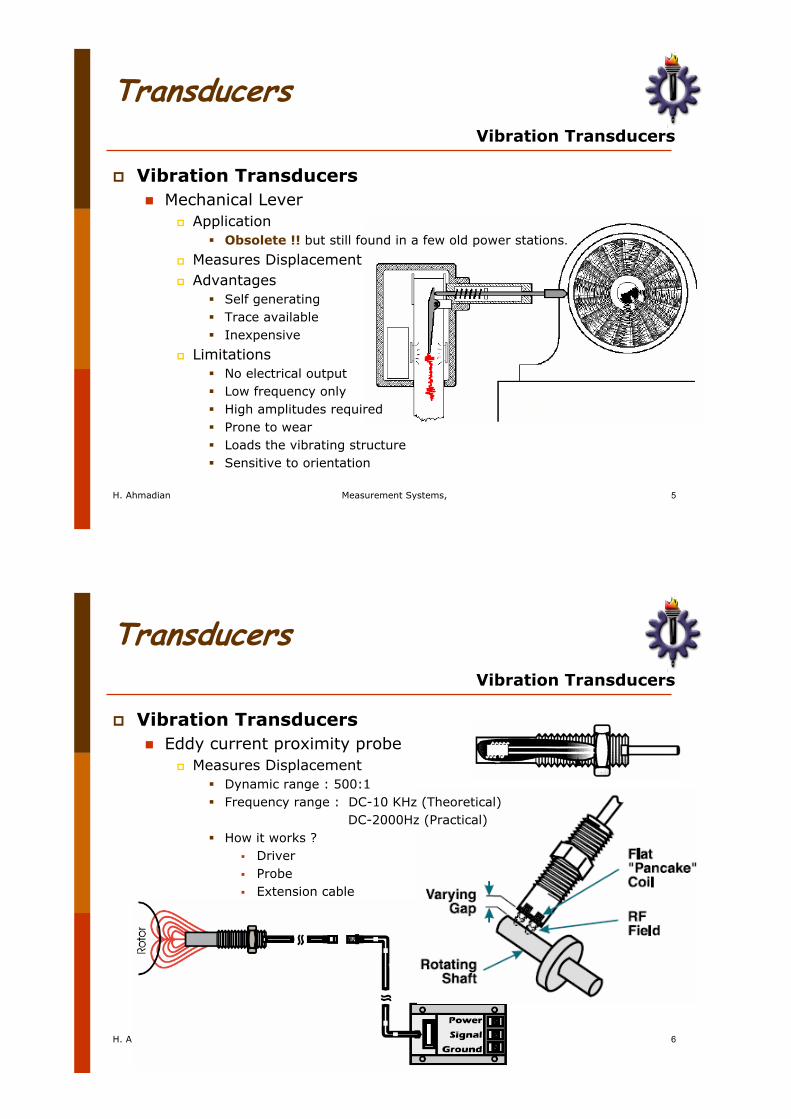
Vibration TransducersCommonly referred to as pickups or sensors
Early Methods of vibration measurementMeasurement !!?. . . . . . . “ Evaluation ” sounds better !
Vibration Transducers
Touching finger Transfer through a rod Transfer through a doctor’s stethoscope
H. Ahmadian Measurement Systems, 5
Transducers
Vibration TransducersMechanical Lever
ApplicationObsolete !! but still found in a few old power stations.
Measures Displacement Advantages
Self generatingTrace availableInexpensive
LimitationsNo electrical outputLow frequency onlyHigh amplitudes requiredProne to wearLoads the vibrating structureSensitive to orientation
Vibration Transducers
H. Ahmadian Measurement Systems, 6
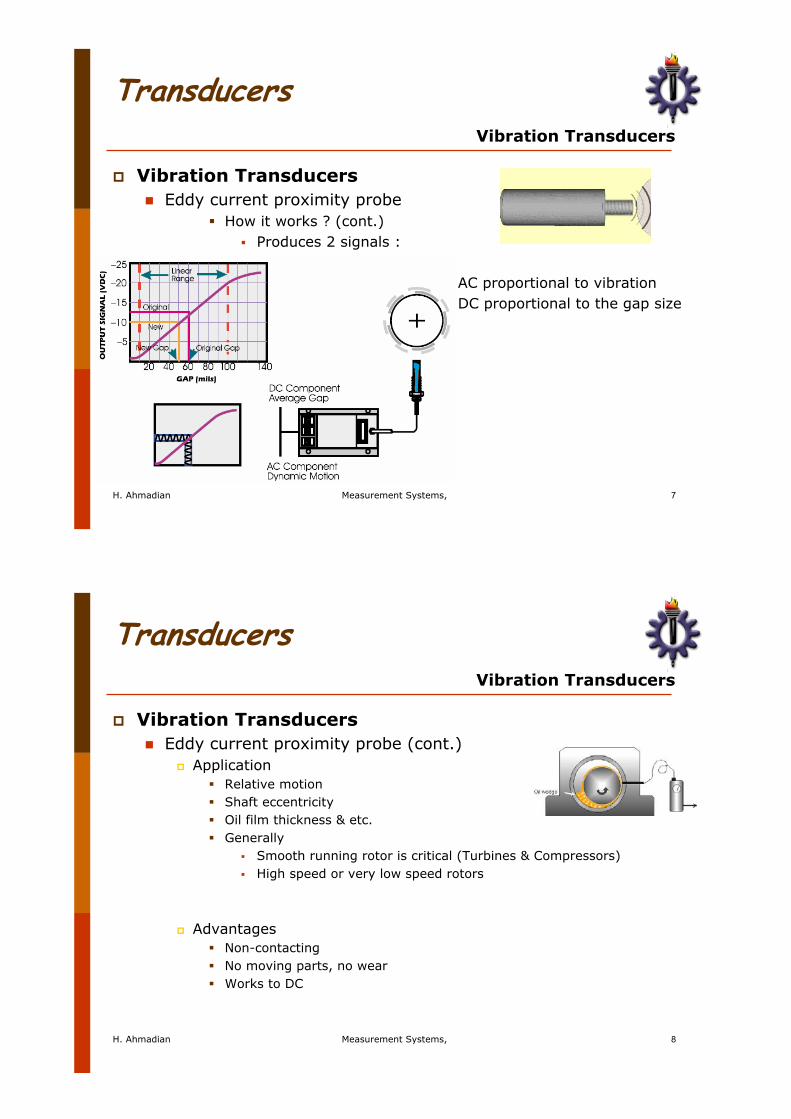
Vibration TransducersEddy current proximity probe
Measures DisplacementDynamic range : 500:1Frequency range : DC-10 KHz (Theoretical)
DC-2000Hz (Practical)How it works ?
DriverProbeExtension cable
TransducersVibration Transducers
H. Ahmadian Measurement Systems, 7
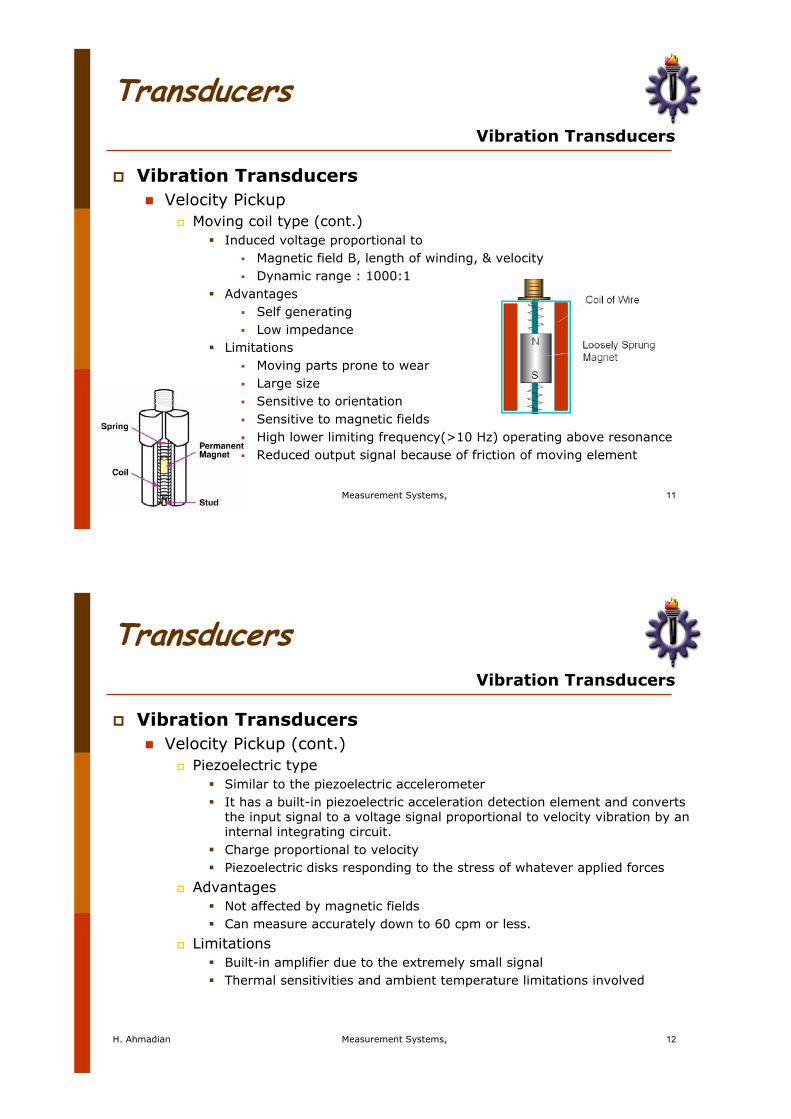
Vibration TransducersEddy current proximity probe
How it works ? (cont.)Produces 2 signals :
AC proportional to vibrationDC proportional to the gap size
TransducersVibration Transducers
H. Ahmadian Measurement Systems, 8
Vibration TransducersEddy current proximity probe (cont.)
ApplicationRelative motionShaft eccentricityOil film thickness & etc.Generally
Smooth running rotor is critical (Turbines & Compressors)High speed or very low speed rotors
AdvantagesNon-contactingNo moving parts, no wearWorks to DC
TransducersVibration Transducers

H. Ahmadian Measurement Systems, 9
Vibration TransducersEddy current proximity probe (cont.)
LimitationsShaft magnetic properties VariationsShaft geometric irregularities
Local calibration necessaryLimited practical frequency range as displacement relatively small at high frequencies
TransducersVibration Transducers
erroneous signal components
H. Ahmadian Measurement Systems, 10
Vibration TransducersVelocity Pickup
2 primary types :Moving coil typePiezoelectric type
Moving coil typeHow it works ?
Induced voltage proportional to Magnetic field B, length of winding, & velocityDynamic range : 1000:1
TransducersVibration Transducers
H. Ahmadian Measurement Systems, 11
TransducersVibration Transducers
Vibration TransducersVelocity Pickup
Moving coil type (cont.)Induced voltage proportional to
Magnetic field B, length of winding, & velocityDynamic range : 1000:1
AdvantagesSelf generatingLow impedance
LimitationsMoving parts prone to wearLarge sizeSensitive to orientationSensitive to magnetic fieldsHigh lower limiting frequency(>10 Hz) operating above resonanceReduced output signal because of friction of moving element
H. Ahmadian Measurement Systems, 12
TransducersVibration Transducers
Vibration TransducersVelocity Pickup (cont.)
Piezoelectric typeSimilar to the piezoelectric accelerometer It has a built-in piezoelectric acceleration detection element and converts the input signal to a voltage signal proportional to velocity vibration by an internal integrating circuit.Charge proportional to velocityPiezoelectric disks responding to the stress of whatever applied forces
AdvantagesNot affected by magnetic fieldsCan measure accurately down to 60 cpm or less.
LimitationsBuilt-in amplifier due to the extremely small signal Thermal sensitivities and ambient temperature limitations involved
H. Ahmadian Measurement Systems, 13
TransducersVibration Transducers
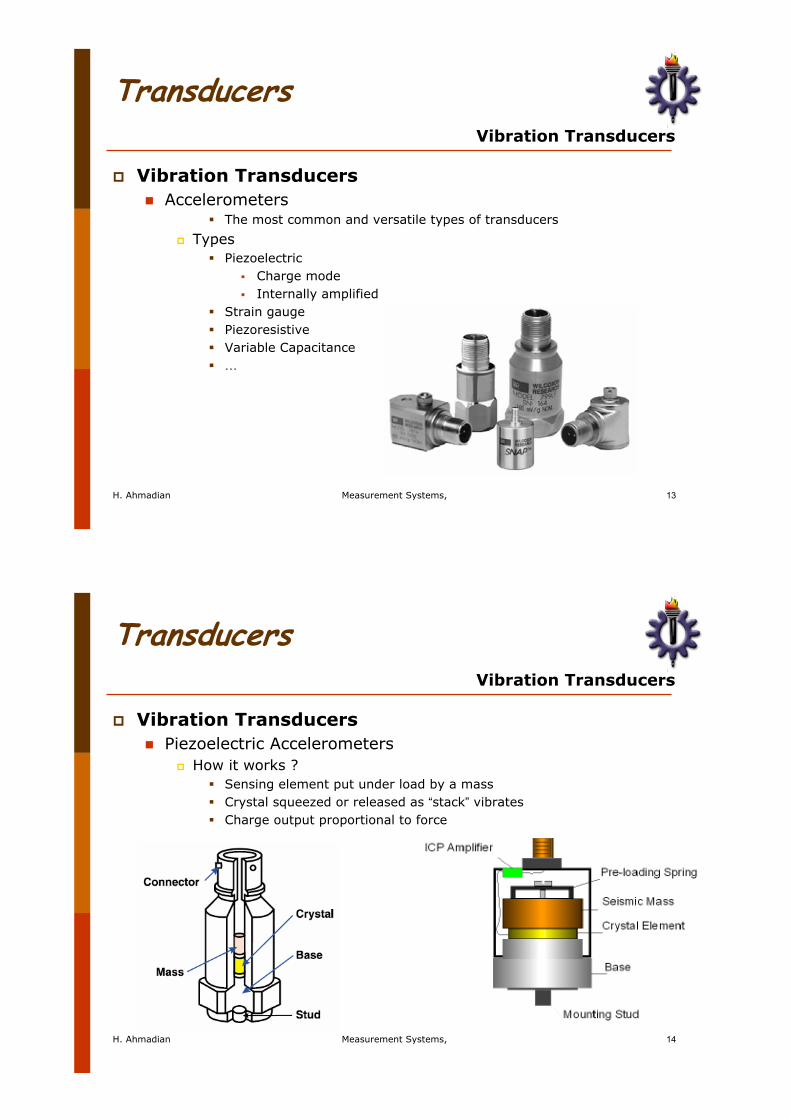
Vibration TransducersAccelerometers
The most common and versatile types of transducers
TypesPiezoelectric
Charge modeInternally amplified
Strain gaugePiezoresistiveVariable Capacitance…
H. Ahmadian Measurement Systems, 14
TransducersVibration Transducers
Vibration TransducersPiezoelectric Accelerometers
How it works ?Sensing element put under load by a massCrystal squeezed or released as “stack” vibratesCharge output proportional to force

H. Ahmadian Measurement Systems, 15
TransducersVibration Transducers
Vibration TransducersPiezoelectric Accelerometers (cont.)
Measures accelerationDynamic range ContactingMeasures absolute casing motion
AdvantagesSelf generatingRuggedNo moving parts, no wearVery large dynamic rangeWide frequency & amplitude rangeCompact & often low weightOrientation not importantVelocity or displacement output available
)160(1:108 dB
H. Ahmadian Measurement Systems, 16
TransducersVibration Transducers
Vibration TransducersPiezoelectric Accelerometers (cont.)
LimitationsHigh impedance outputNo true DC response
TypesCompression type design
Traditional simple constructionVery stable but high environmental influenceTypically used for high shock levels
P :piezoelectric element B :Base
M :Seismic mass S :Spring
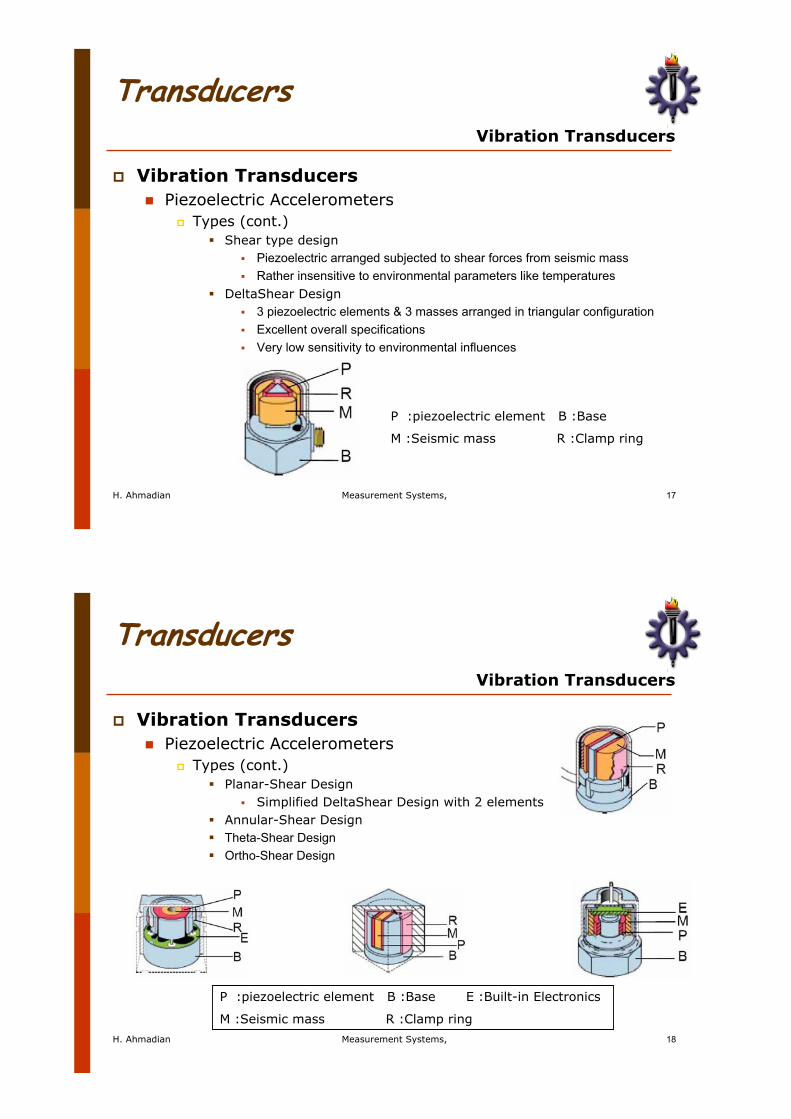
H. Ahmadian Measurement Systems, 17
TransducersVibration Transducers
Vibration TransducersPiezoelectric Accelerometers
Types (cont.)Shear type design
Piezoelectric arranged subjected to shear forces from seismic massRather insensitive to environmental parameters like temperatures
DeltaShear Design3 piezoelectric elements & 3 masses arranged in triangular configurationExcellent overall specificationsVery low sensitivity to environmental influences
P :piezoelectric element B :Base
M :Seismic mass R :Clamp ring
H. Ahmadian Measurement Systems, 18
TransducersVibration Transducers
Vibration TransducersPiezoelectric Accelerometers
Types (cont.)Planar-Shear Design
Simplified DeltaShear Design with 2 elementsAnnular-Shear DesignTheta-Shear DesignOrtho-Shear Design
P :piezoelectric element B :Base E :Built-in Electronics
M :Seismic mass R :Clamp ring

H. Ahmadian Measurement Systems, 19
TransducersAccelerometer Dynamics
Full understanding of accelerometer dynamics Characteristics of acceleration, vibration, and shock
Vibrating MotionPeriodicStationary RandomNon-Stationary RandomTransient
H. Ahmadian Measurement Systems, 20
TransducersAccelerometer Dynamics
Periodic VibrationSinusoidal
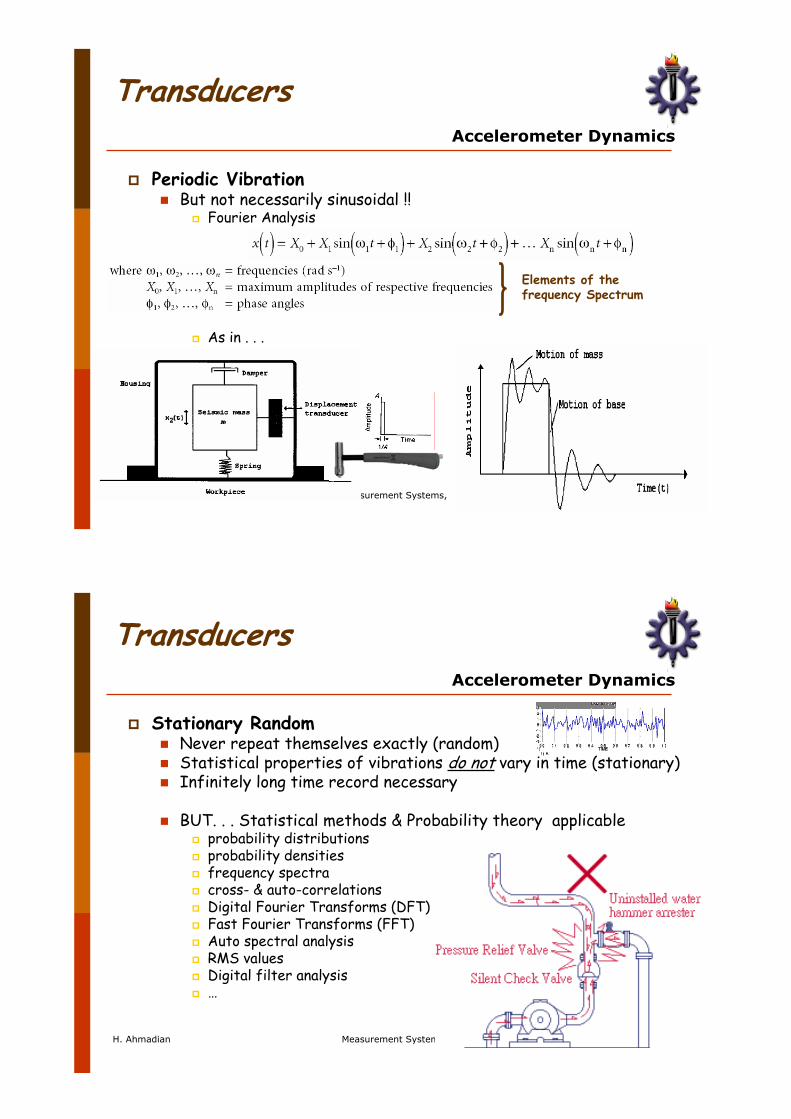
H. Ahmadian Measurement Systems, 21
TransducersAccelerometer Dynamics
Periodic VibrationBut not necessarily sinusoidal !!
Fourier Analysis
As in . . .
Elements of the frequency Spectrum
H. Ahmadian Measurement Systems, 22
TransducersAccelerometer Dynamics
Stationary RandomNever repeat themselves exactly (random)Statistical properties of vibrations do not vary in time (stationary)Infinitely long time record necessary
BUT. . . Statistical methods & Probability theory applicableprobability distributionsprobability densitiesfrequency spectracross- & auto-correlationsDigital Fourier Transforms (DFT)Fast Fourier Transforms (FFT)Auto spectral analysisRMS valuesDigital filter analysis …

H. Ahmadian Measurement Systems, 23
TransducersAccelerometer Dynamics
Non-Stationary RandomNever repeat themselves exactly (random)Statistical properties of vibrations do vary in time (non-stationary)
H. Ahmadian Measurement Systems, 24
TransducersAccelerometer Dynamics
Transients and ShocksShort-duration sudden-occurrence vibrationStatistical methods and Fourier Transforms applicable
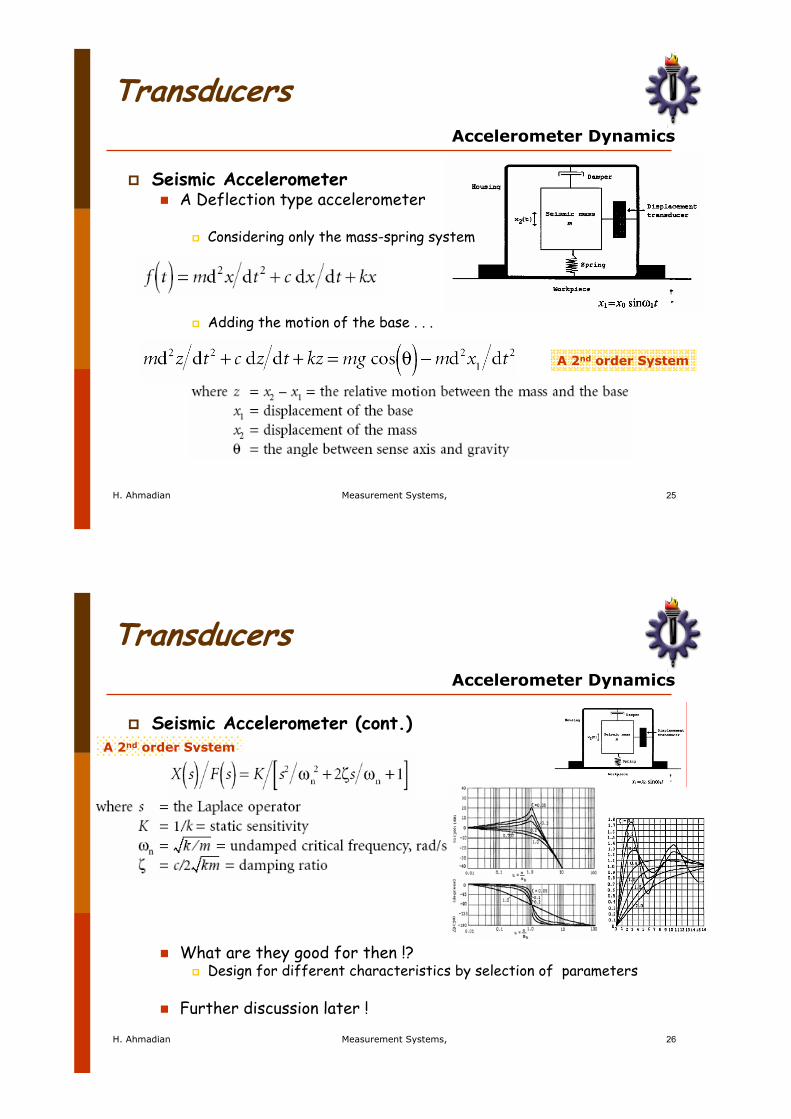
H. Ahmadian Measurement Systems, 25
TransducersAccelerometer Dynamics
Seismic AccelerometerA Deflection type accelerometer
Considering only the mass-spring system
Adding the motion of the base . . .
A 2nd order System
H. Ahmadian Measurement Systems, 26
Seismic Accelerometer (cont.)
What are they good for then !?Design for different characteristics by selection of parameters
Further discussion later !
TransducersAccelerometer Dynamics
A 2nd order System
H. Ahmadian Measurement Systems, 27
Covered TopicsVibration Transducers
Introduction Acceleration, Vibration and Shock MeasurementAccelerometer DynamicsElectromechanical Force-Balance (Servo) AccelerometersPiezoelectric AccelerometersPiezoresistive AccelerometersDifferential-Capacitance AccelerometersStrain-Gage AccelerometersSeismic AccelerometersInertial Types, Cantilever, and Suspended-Mass ConfigurationElectrostatic Force Feedback AccelerometersMicroaccelerometersCross-Axis SensitivitySelection, Full-Scale Range, and Overload CapabilitySignal Conditioning
Vibration Measurement Systems
H.Ahmadian
VibrationTransducers
H. Ahmadian Measurement Systems 2
Covering TopicsVibration Transducers (Chapter 17)
IntroductionAcceleration, Vibration and Shock MeasurementAccelerometer DynamicsElectromechanical Force-Balance (Servo) AccelerometersPiezoelectric AccelerometersPiezoresistive AccelerometersDifferential-Capacitance AccelerometersStrain-Gage AccelerometersSeismic AccelerometersInertial Types, Cantilever, and Suspended-Mass ConfigurationElectrostatic Force Feedback AccelerometersMicroaccelerometersCross-Axis SensitivitySelection, Full-Scale Range, and Overload CapabilitySignal Conditioning
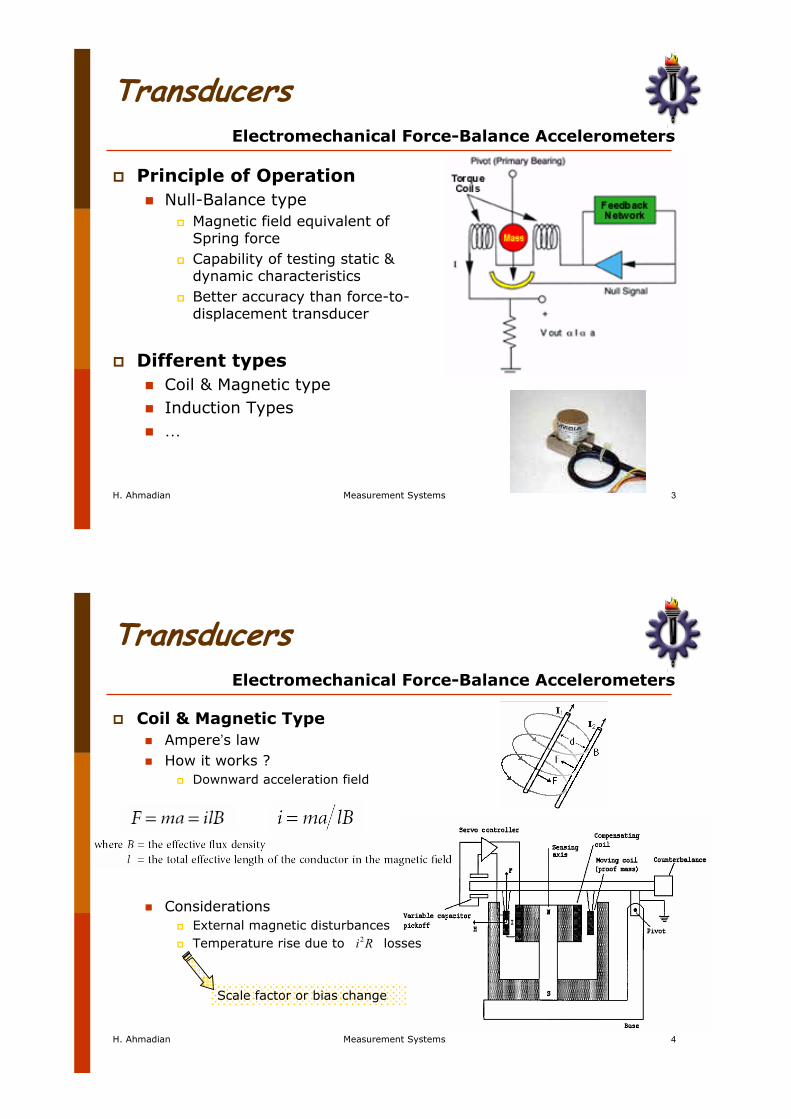
H. Ahmadian Measurement Systems 3
Transducers
Principle of OperationNull-Balance type
Magnetic field equivalent of Spring force Capability of testing static & dynamic characteristicsBetter accuracy than force-to-displacement transducer
Different typesCoil & Magnetic typeInduction Types…
Electromechanical Force-Balance Accelerometers
H. Ahmadian Measurement Systems 4
Transducers
Coil & Magnetic TypeAmpere’s lawHow it works ?
Downward acceleration field
ConsiderationsExternal magnetic disturbancesTemperature rise due to losses
Electromechanical Force-Balance Accelerometers
Ri2
Scale factor or bias change

H. Ahmadian Measurement Systems 5
Transducers
Coil & Magnetic TypeRotational type servo-accelerometerHow it works ?
Motion from null of M caused by accelerationMagnetic torque to return the mass to neutral
Electromechanical Force-Balance Accelerometers
More in Doebelin 1990
H. Ahmadian Measurement Systems 6
Transducers
Principle of OperationPolarization principle
Mass in direct contact with piezoelectricProportional electric charge
Piezoelectric Accelerometers
Generator action Motor action

H. Ahmadian Measurement Systems 7
Transducers
Principle of Operation (cont.)Typical frequency response for a PZTDetermining resonant frequency
Mathematically a 3rd order system
Piezoelectric Accelerometers
Not for crystal itself but the electric circuit
H. Ahmadian Measurement Systems 8
Transducers
Principle of Operation (cont.)2 commonly used crystals
Lead-zirconate titanate [PZT]Quartz
Low frequency response limited by piezoelectric Why ?High frequency response related to mechanical response
2 basic design configurationsCompression type
Good mass/sensitivity ratioHousing as an internal part of the mass/spring system
Shear stress type
Piezoelectric Accelerometers
(150 times more sensitive)
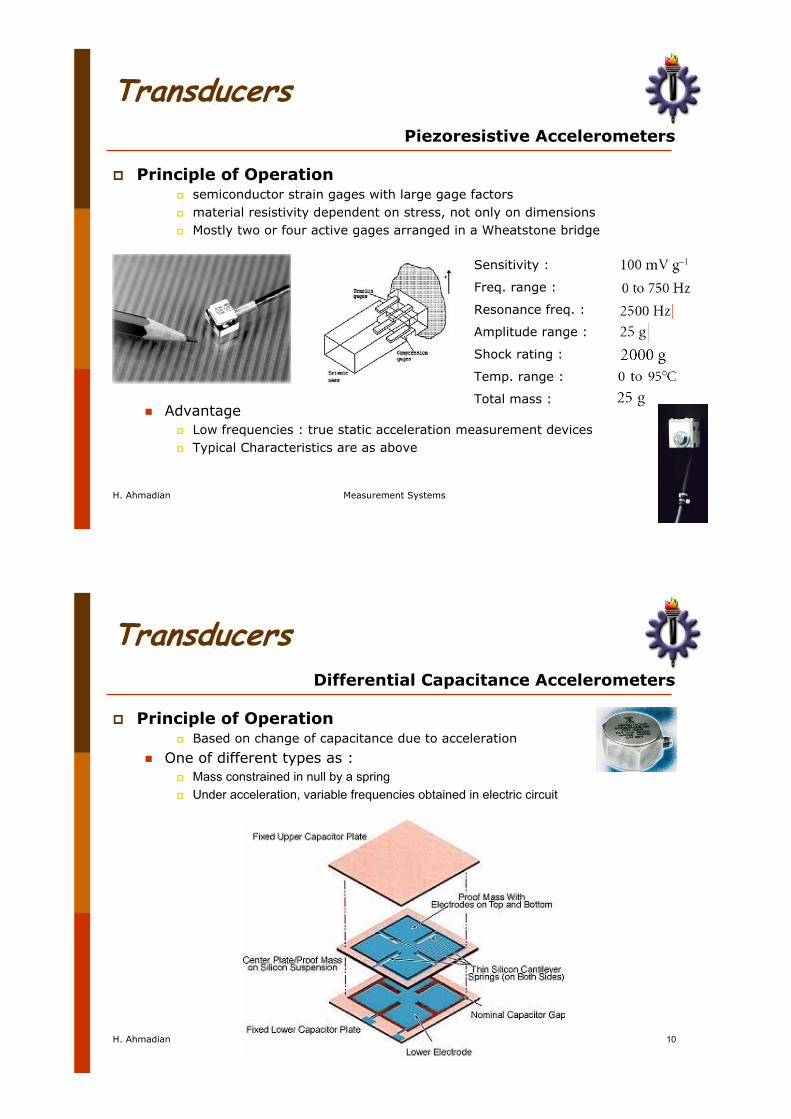
H. Ahmadian Measurement Systems 9
Transducers
Principle of Operationsemiconductor strain gages with large gage factorsmaterial resistivity dependent on stress, not only on dimensionsMostly two or four active gages arranged in a Wheatstone bridge
AdvantageLow frequencies : true static acceleration measurement devicesTypical Characteristics are as above
Piezoresistive Accelerometers
Sensitivity :
Freq. range :
Resonance freq. :
Amplitude range :
Shock rating :
Temp. range :
Total mass :
H. Ahmadian Measurement Systems 10
Transducers
Principle of OperationBased on change of capacitance due to acceleration
One of different types as :Mass constrained in null by a springUnder acceleration, variable frequencies obtained in electric circuit
Differential Capacitance Accelerometers
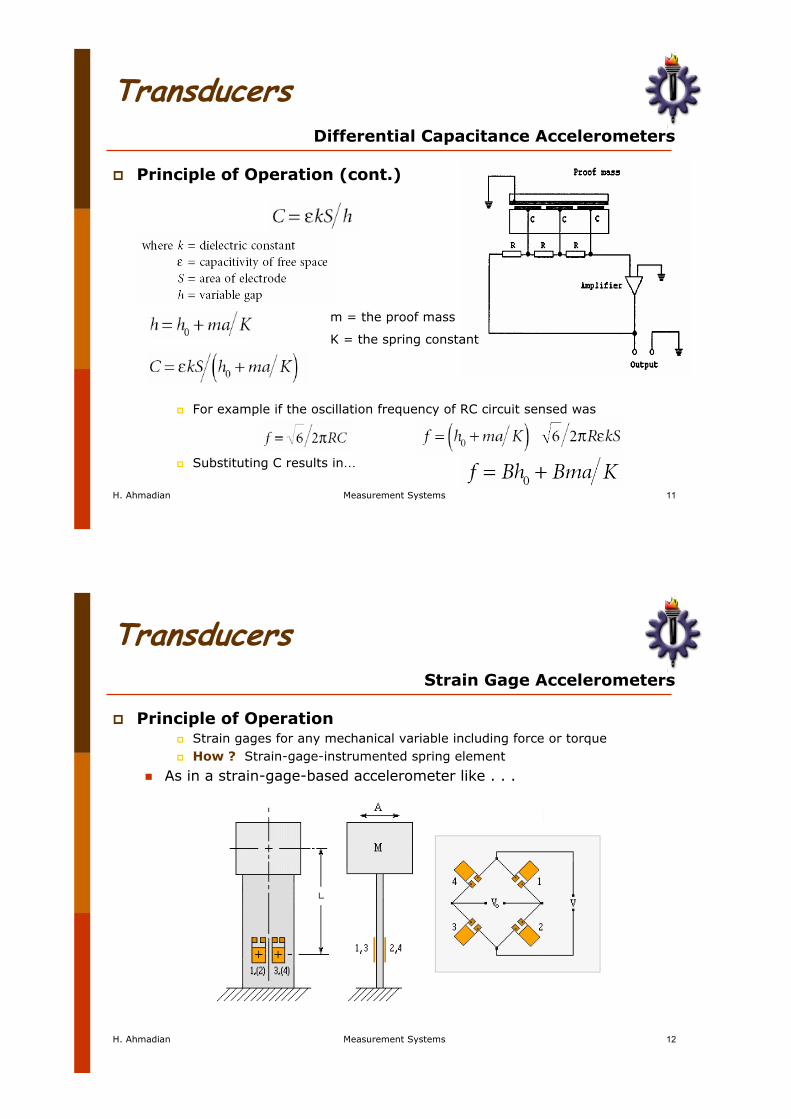
H. Ahmadian Measurement Systems 11
Transducers
Principle of Operation (cont.)
For example if the oscillation frequency of RC circuit sensed was
Substituting C results in…
Differential Capacitance Accelerometers
m = the proof mass
K = the spring constant
H. Ahmadian Measurement Systems 12
Transducers
Principle of OperationStrain gages for any mechanical variable including force or torqueHow ? Strain-gage-instrumented spring element
As in a strain-gage-based accelerometer like . . .
Strain Gage Accelerometers
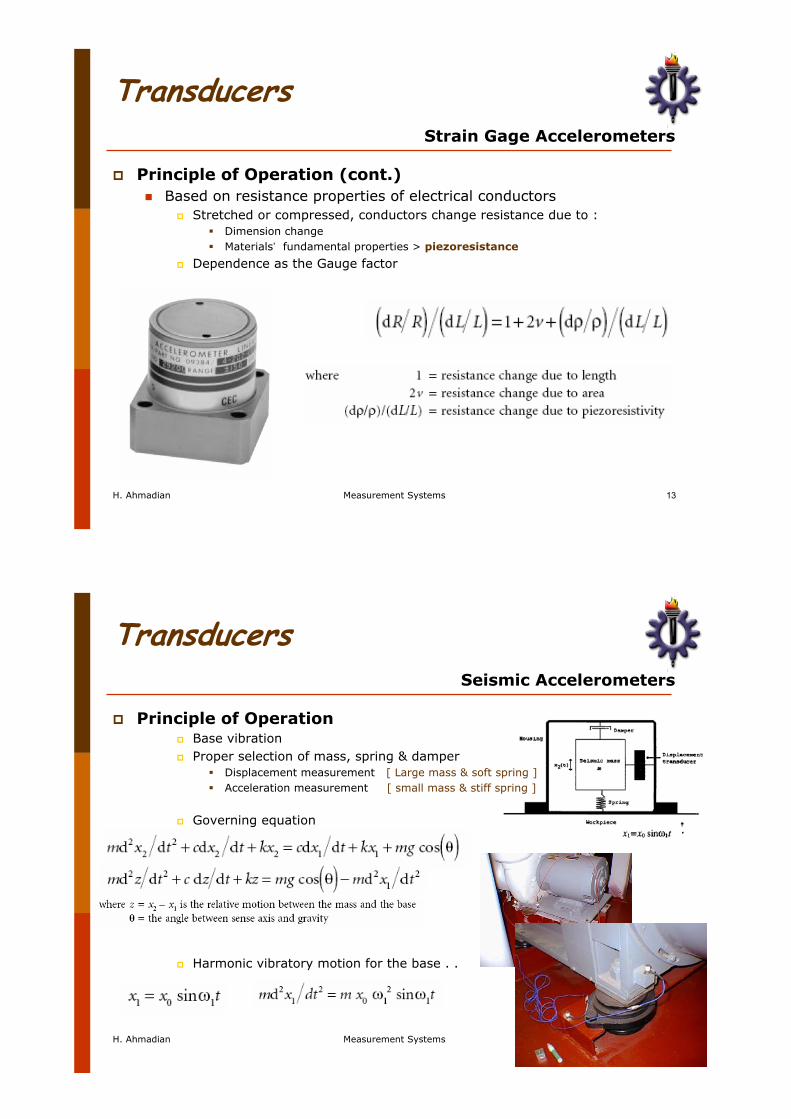
H. Ahmadian Measurement Systems 13
Transducers
Principle of Operation (cont.)Based on resistance properties of electrical conductors
Stretched or compressed, conductors change resistance due to :Dimension changeMaterials’ fundamental properties > piezoresistance
Dependence as the Gauge factor
Strain Gage Accelerometers
H. Ahmadian Measurement Systems 14
Transducers
Principle of OperationBase vibrationProper selection of mass, spring & damper
Displacement measurement [ Large mass & soft spring ]Acceleration measurement [ small mass & stiff spring ]
Governing equation
Harmonic vibratory motion for the base . .
Seismic Accelerometers
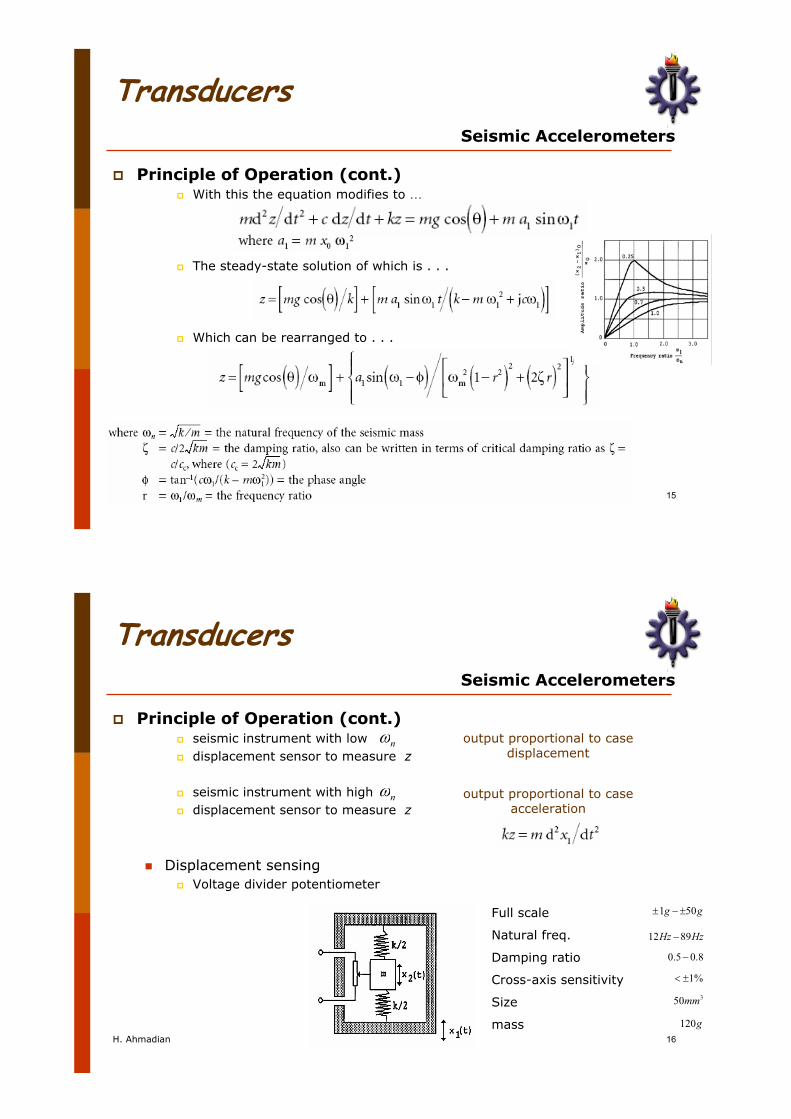
H. Ahmadian Measurement Systems 15
Transducers
Principle of Operation (cont.)With this the equation modifies to …
The steady-state solution of which is . . .
Which can be rearranged to . . .
Seismic Accelerometers
H. Ahmadian Measurement Systems 16
Transducers
Principle of Operation (cont.)seismic instrument with low displacement sensor to measure z
seismic instrument with high displacement sensor to measure z
Displacement sensingVoltage divider potentiometer
Seismic Accelerometers
output proportional to case displacement
n
n output proportional to case acceleration
Full scale
Natural freq.
Damping ratio
Cross-axis sensitivity
Size
mass
gg 501
HzHz 8912
8.05.0
%1
350mm
g120
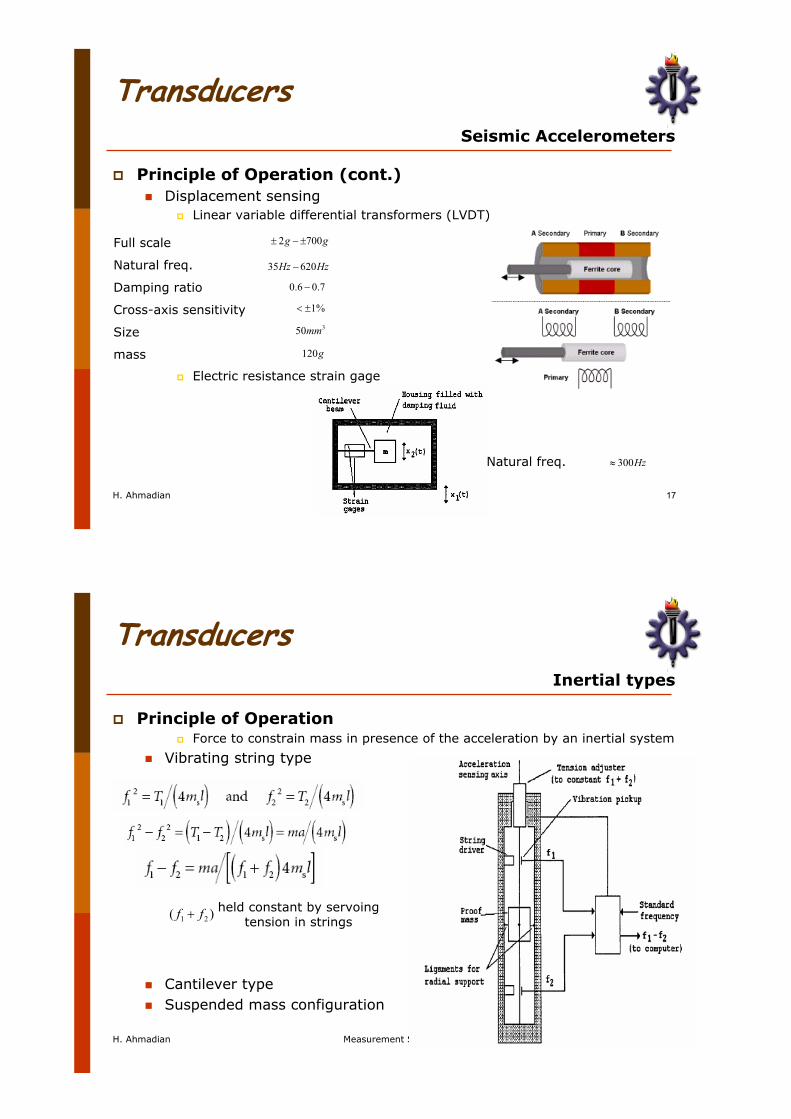
H. Ahmadian Measurement Systems 17
Transducers
Principle of Operation (cont.)Displacement sensing
Linear variable differential transformers (LVDT)
Electric resistance strain gage
Seismic Accelerometers
Full scale
Natural freq.
Damping ratio
Cross-axis sensitivity
Size
mass
gg 7002
HzHz 62035
7.06.0
%1
350mm
g120
Natural freq. Hz300
H. Ahmadian Measurement Systems 18
Transducers
Principle of OperationForce to constrain mass in presence of the acceleration by an inertial system
Vibrating string type
Cantilever typeSuspended mass configuration
Inertial types
held constant by servoingtension in strings
)( 21 ff

H. Ahmadian Measurement Systems 19
Transducers
Principle of OperationBased on Coulomb’s law between to charged electrodes
voltage in terms of force required to sustain a movable known electrode
force per unit area of the charged conductor
One stationary and one moveable electrode…. The attraction force
Electrostatic force feedback accelerometers
K is the dielectric constant
H. Ahmadian Measurement Systems 20
Transducers
Principle of Operation (cont.)In presence of acceleration is to restrain the electrode in null
The device, measuring acceleration in one direction, has a quadratic output
If the servo applies a to the fixed electrode
Force balance equation of movable electrode for downward acceleration is
bias potential V1 held constant & high gain of the control loopvariations in gap negligible
Electrostatic force feedback accelerometers
H. Ahmadian Measurement Systems 21
Transducers
Principle of Operation (cont.)Main advantages
Extreme mechanical simplicityLow power requirementsAbsence of inherent sources of hysteresiserrorszero temperature coefficientsEease of shielding from stray fields
Main difficultiesRelatively high electric field intensity requiredExtremely good bearings necessaryDamping provided electrically, or by viscosity of gaseous atmosphere
Electrostatic force feedback accelerometers
H. Ahmadian Measurement Systems 22
Covered TopicsVibration Transducers
Introduction
Acceleration, Vibration and Shock Measurement
Accelerometer Dynamics
Electromechanical Force-Balance (Servo) Accelerometers
Piezoelectric Accelerometers
Piezoresistive Accelerometers
Differential-Capacitance Accelerometers
Strain-Gage Accelerometers
Seismic Accelerometers
Inertial Types, Cantilever, and Suspended-Mass Configuration
Electrostatic Force Feedback Accelerometers
Microaccelerometers
Cross-Axis Sensitivity
Selection, Full-Scale Range, and Overload Capability
Signal Conditioning

Vibration Measurement Systems
H.Ahmadian
VibrationTransducers
H. Ahmadian Measurement Systems 2
Covering TopicsVibration Transducers
Introduction Acceleration, Vibration and Shock MeasurementAccelerometer DynamicsElectromechanical Force-Balance (Servo) AccelerometersPiezoelectric AccelerometersPiezoresistive AccelerometersDifferential-Capacitance AccelerometersStrain-Gage AccelerometersSeismic AccelerometersInertial Types, Cantilever, and Suspended-Mass ConfigurationElectrostatic Force Feedback AccelerometersMicroaccelerometersCross-Axis SensitivitySelection, Full-Scale Range, and Overload CapabilitySignal Conditioning

H. Ahmadian Measurement Systems 3
Transducers
A Vibrating structure may have been subjected to
Torsional vibrationCompressional vibrationTransverse vibration…
Cross-Axis sensitivityResponse to a plane perpendicular to the main axis Expressed in percent of the main
Cross-Axis sensitivity
H. Ahmadian Measurement Systems 4
Transducers
First glance categorizationGeneral purpose
various sensitivities, frequencies, full scale, & overload ranges
Special types
Characteristics to be consideredTransient responseCross-axis sensitivityFrequency rangeSensitivityMass & dynamic rangeEnvironmental conditions
Accelerometer Selection

H. Ahmadian Measurement Systems 5
Transducers
Frequency RangeUpper limit
Rule of thumbUpper limit : one-third of resonance
vibrations measured less than 1 dB in linearityApplications with lower linearity (e.g., 3 dB)
As for internal conditions of machines (reputability more important)½ or 1/3 of natural freq.
Lower limit2 factors
Amplifier’s cut-offAmbient temperature fluctuations
Accelerometer Selection : Some Hints
r1
Slide 5
r1 itrafieian, 5/9/2005
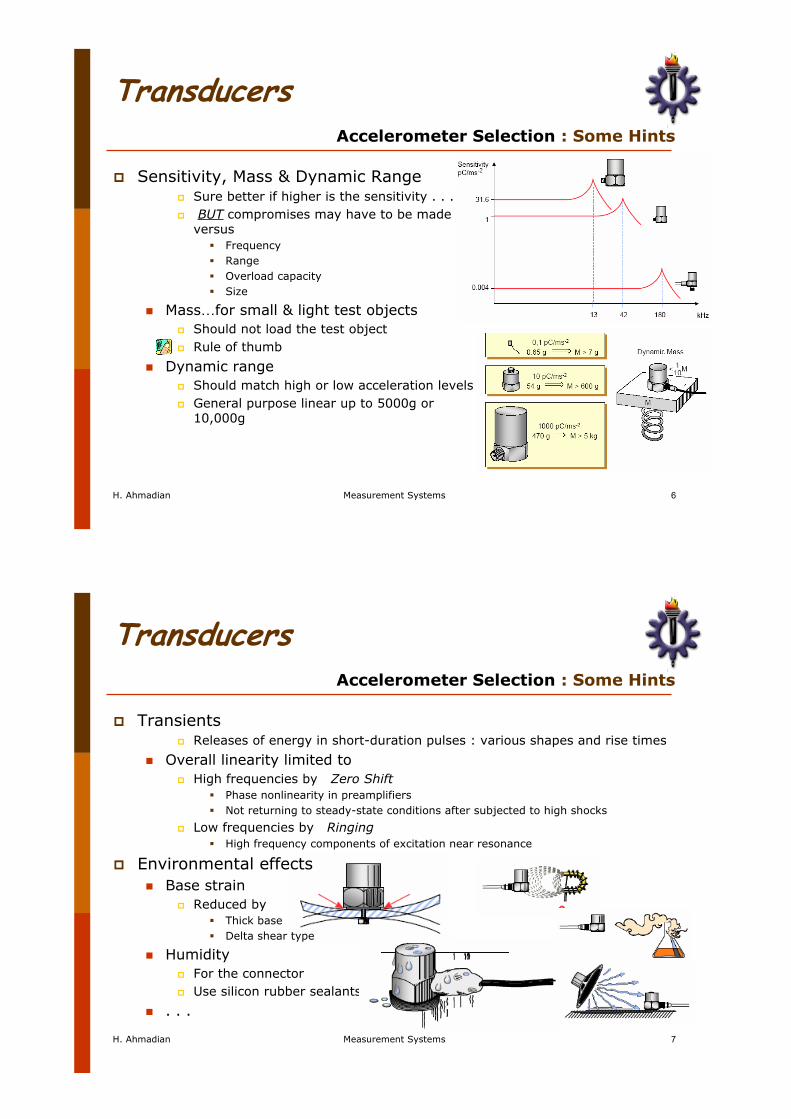
H. Ahmadian Measurement Systems 6
Transducers
Sensitivity, Mass & Dynamic RangeSure better if higher is the sensitivity . . . BUT compromises may have to be made
versusFrequencyRangeOverload capacitySize
Mass…for small & light test objectsShould not load the test objectRule of thumb
Dynamic rangeShould match high or low acceleration levelsGeneral purpose linear up to 5000g or 10,000g
Accelerometer Selection : Some Hints
H. Ahmadian Measurement Systems 7
Transducers
TransientsReleases of energy in short-duration pulses : various shapes and rise times
Overall linearity limited toHigh frequencies by Zero Shift
Phase nonlinearity in preamplifiersNot returning to steady-state conditions after subjected to high shocks
Low frequencies by RingingHigh frequency components of excitation near resonance
Environmental effectsBase strain
Reduced byThick baseDelta shear type
HumidityFor the connectorUse silicon rubber sealants
. . .
Accelerometer Selection : Some Hints
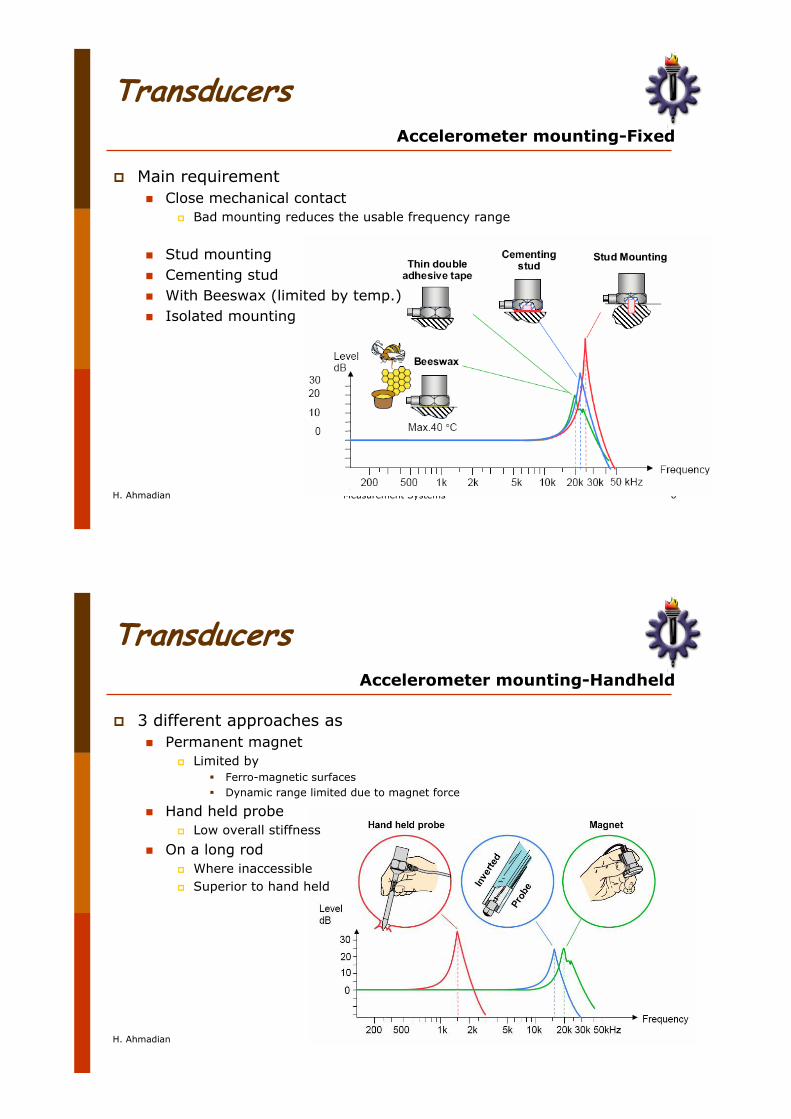
H. Ahmadian Measurement Systems 8
Transducers
Main requirementClose mechanical contact
Bad mounting reduces the usable frequency range
Stud mountingCementing studWith Beeswax (limited by temp.)Isolated mounting
Accelerometer mounting-Fixed
H. Ahmadian Measurement Systems 9
Transducers
3 different approaches asPermanent magnet
Limited by Ferro-magnetic surfacesDynamic range limited due to magnet force
Hand held probeLow overall stiffness
On a long rodWhere inaccessibleSuperior to hand held
Accelerometer mounting-Handheld
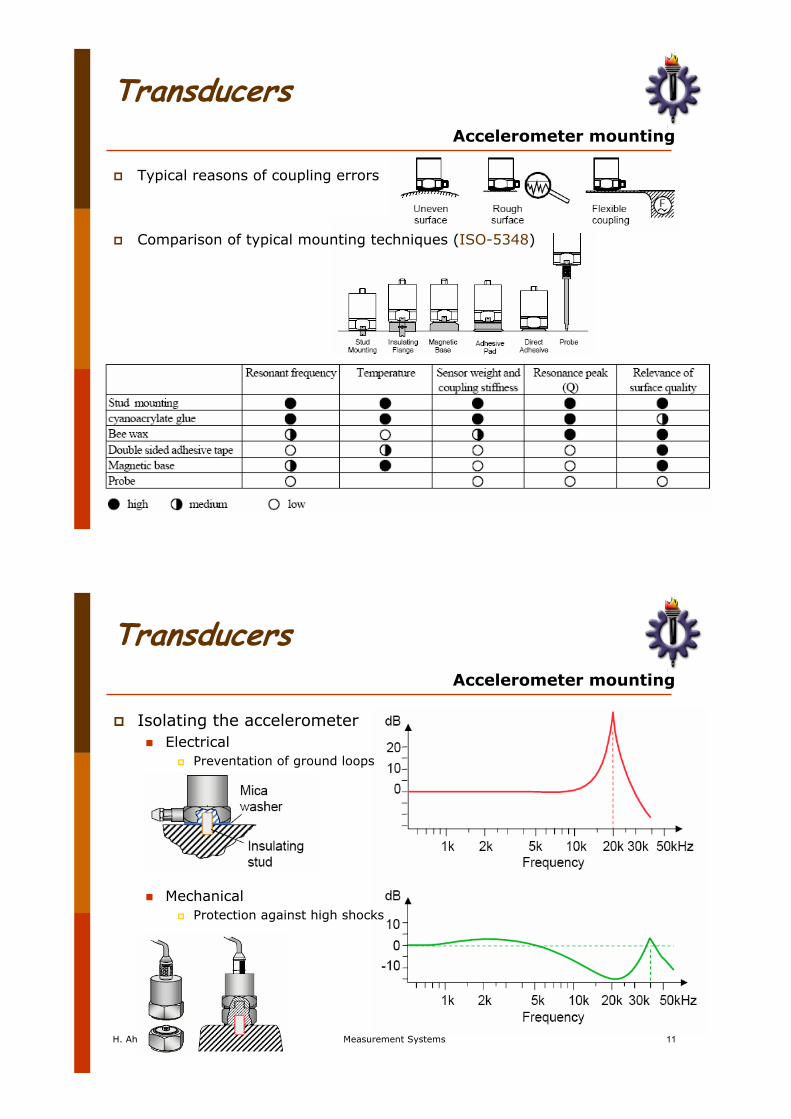
H. Ahmadian Measurement Systems 10
Transducers
Typical reasons of coupling errors
Comparison of typical mounting techniques (ISO-5348)
Accelerometer mounting
H. Ahmadian Measurement Systems 11
TransducersAccelerometer mounting
Isolating the accelerometerElectrical
Preventation of ground loops
MechanicalProtection against high shocks
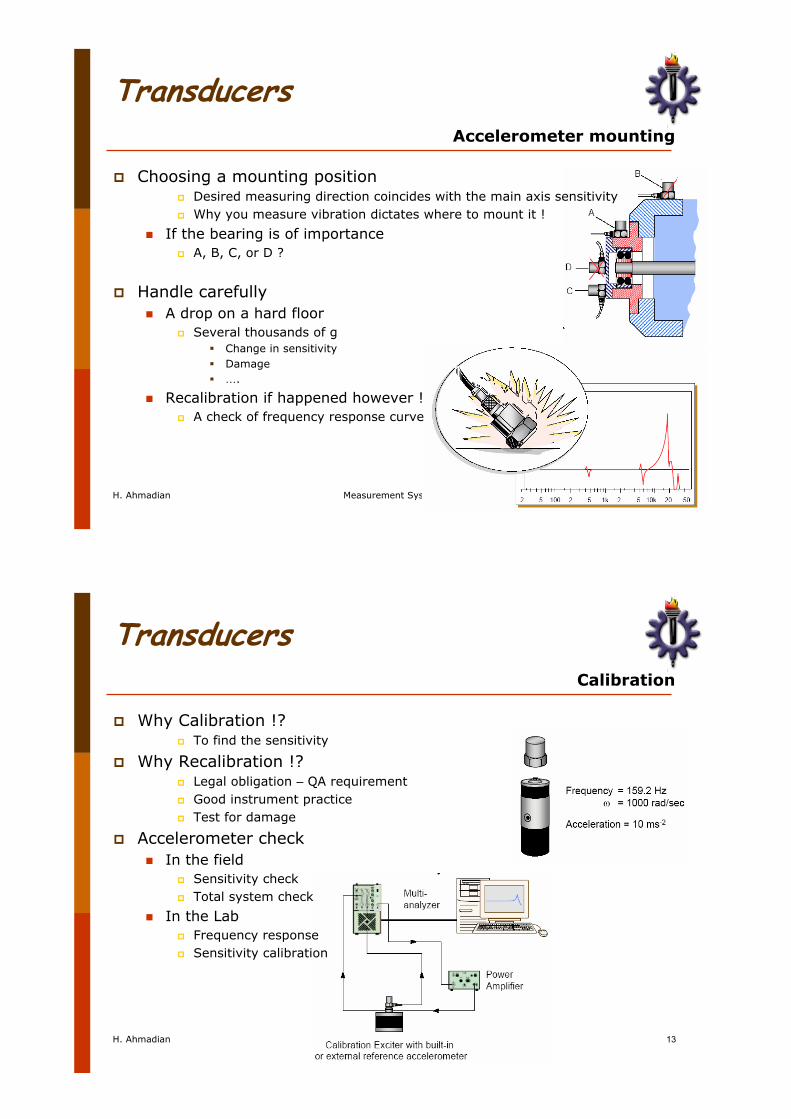
H. Ahmadian Measurement Systems 12
TransducersAccelerometer mounting
Choosing a mounting positionDesired measuring direction coincides with the main axis sensitivityWhy you measure vibration dictates where to mount it !
If the bearing is of importanceA, B, C, or D ?
Handle carefullyA drop on a hard floor
Several thousands of gChange in sensitivityDamage….
Recalibration if happened however !A check of frequency response curve
H. Ahmadian Measurement Systems 13
TransducersCalibration
Why Calibration !?To find the sensitivity
Why Recalibration !?Legal obligation – QA requirementGood instrument practiceTest for damage
Accelerometer checkIn the field
Sensitivity checkTotal system check
In the LabFrequency responseSensitivity calibration

H. Ahmadian Measurement Systems 14
TransducersCalibration
Mounted resonance testThe test is done to check
Cable connectionLoose mountinggood mounting not a low mechanical impedance at mounting location
Done as followsAccelerometer excited by a suitable square pulseResponse obtained is filteredFrequency is counted
H. Ahmadian Measurement Systems 15
TransducersCalibration
Back-to-back methodUsing a Reference Standard Accelerometer
Accelerometers with very high accuracy (1%)At a reference frequency (normally 160 or 80 Hz)Over wider frequency ranges with slightly less accuracy
Details in ISO 5347-3
ISO 5347
Methods for Calibration and Characterization of Vibration and Shock
Transducers
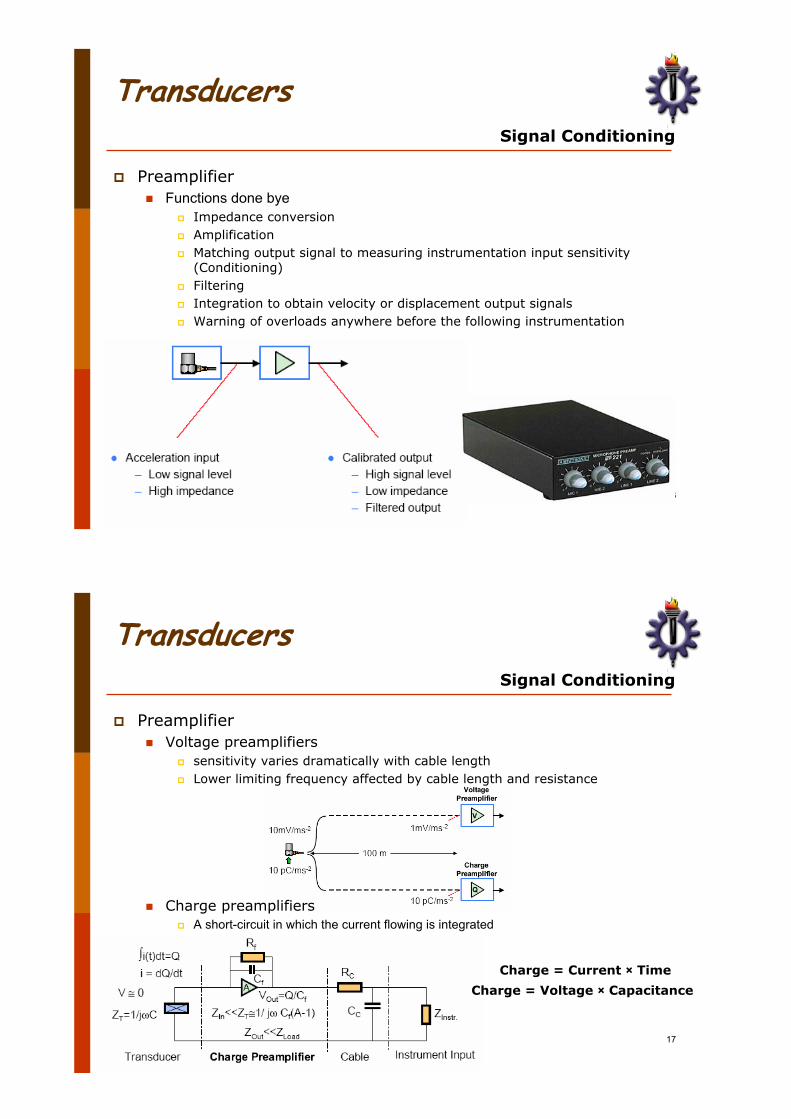
H. Ahmadian Measurement Systems 16
TransducersSignal Conditioning
PreamplifierFunctions done bye
Impedance conversionAmplificationMatching output signal to measuring instrumentation input sensitivity (Conditioning)FilteringIntegration to obtain velocity or displacement output signalsWarning of overloads anywhere before the following instrumentation
H. Ahmadian Measurement Systems 17
TransducersSignal Conditioning
PreamplifierVoltage preamplifiers
sensitivity varies dramatically with cable lengthLower limiting frequency affected by cable length and resistance
Charge preamplifiersA short-circuit in which the current flowing is integrated
Charge = Current × Time
Charge = Voltage × Capacitance

H. Ahmadian Measurement Systems 18
TransducersSignal Conditioning
PreamplifierThe complete transfer function
selected to be large compared to system gain independent of cable length
Low-frequency response a function of well-defined electronic components2 time constants, external & internal for system
fC )1/()( GCC ca
H. Ahmadian Measurement Systems 19
TransducersSignal Conditioning
Pieoresistive transducersHigh amplitude outputsLow output impedancesLow intrinsic noise
Many configured as full-bridge devices
MicroaccelerometersSignal conditioning circuitry integrated within chip with sensorTypical of signal conditioning circuitry as
output : frequency-modulated acceleration signaloutput can be read directly into a digital device

H. Ahmadian Measurement Systems 20
Covered TopicsVibration Transducers
Introduction Acceleration, Vibration and Shock MeasurementAccelerometer DynamicsElectromechanical Force-Balance (Servo) AccelerometersPiezoelectric AccelerometersPiezoresistive AccelerometersDifferential-Capacitance AccelerometersStrain-Gage AccelerometersSeismic AccelerometersInertial Types, Cantilever, and Suspended-Mass ConfigurationElectrostatic Force Feedback AccelerometersMicroaccelerometersCross-Axis SensitivitySelection, Full-Scale Range, and Overload CapabilitySignal Conditioning
Vibration Measurement Systems
H.Ahmadian
Fundamentals of Signal Analysis
H. Ahmadian Measurement Systems 2
Covering TopicsFundamentals of Signal Analysis
Introduction
Time and Frequency Domains: A matter of Perspective
The Time DomainThe Frequency Domain
Understanding Dynamic Signal AnalysisSee Section 83.1 Spectrum Analysis and Correlation
FFT PropertiesSampling and DigitizingAliasingLeakageWindowing
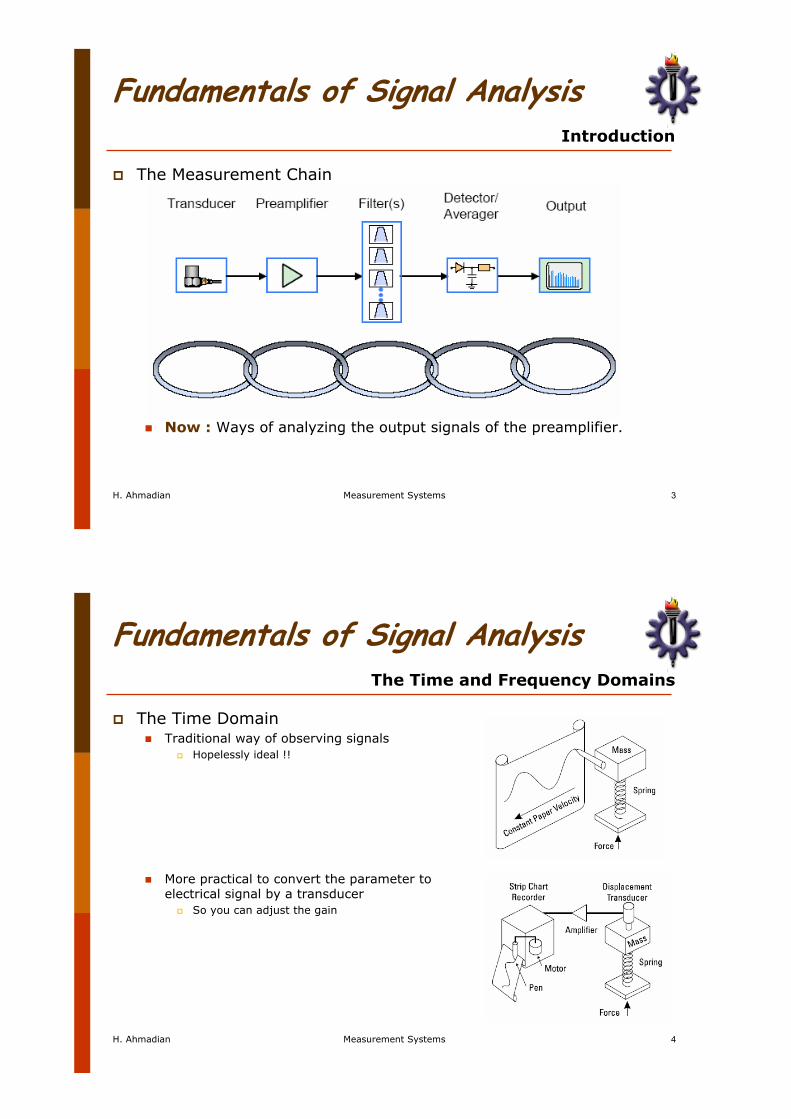
H. Ahmadian Measurement Systems 3
Fundamentals of Signal Analysis
The Measurement Chain
Now : Ways of analyzing the output signals of the preamplifier.
Introduction
H. Ahmadian Measurement Systems 4
Fundamentals of Signal Analysis
The Time DomainTraditional way of observing signals
Hopelessly ideal !!
More practical to convert the parameter to electrical signal by a transducer
So you can adjust the gain
The Time and Frequency Domains
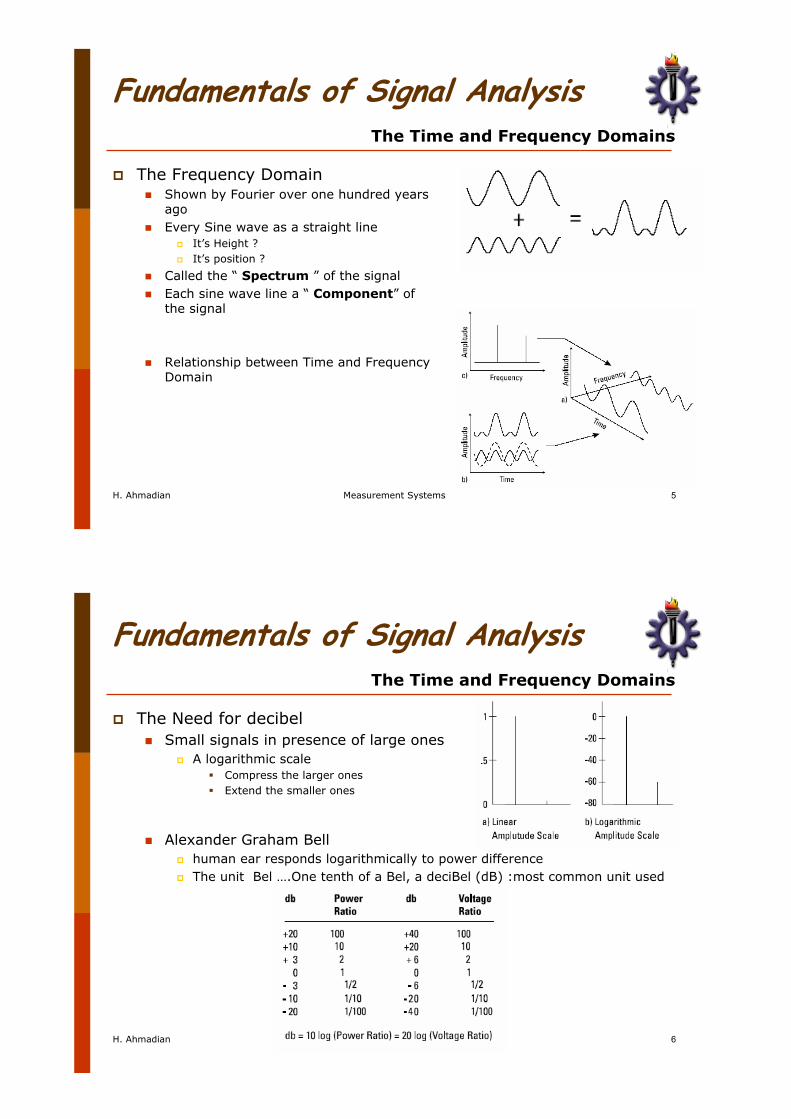
H. Ahmadian Measurement Systems 5
Fundamentals of Signal Analysis
The Frequency DomainShown by Fourier over one hundred years agoEvery Sine wave as a straight line
It’s Height ?It’s position ?
Called the “ Spectrum ” of the signal Each sine wave line a “ Component” of the signal
Relationship between Time and Frequency Domain
The Time and Frequency Domains
H. Ahmadian Measurement Systems 6
Fundamentals of Signal Analysis
The Need for decibelSmall signals in presence of large ones
A logarithmic scaleCompress the larger onesExtend the smaller ones
Alexander Graham Bell human ear responds logarithmically to power difference The unit Bel ….One tenth of a Bel, a deciBel (dB) :most common unit used
The Time and Frequency Domains

H. Ahmadian Measurement Systems 7
Fundamentals of Signal Analysis
When linear & when logarithmic scales !?Depends on the unit to be scaled
LinearWhen the absolute value is importantTypical examples : Time & displacement
LogarithmicWhen the ratio between values is of importanceAs in coins !!
The Time and Frequency Domains
H. Ahmadian Measurement Systems 8
Fundamentals of Signal Analysis
Linear vs. Logarithmic frequency scaleLinear frequency scale
to identify harmonically related components
Logarithmic frequency scalemuch wider frequency range can be covered
The Time and Frequency Domains
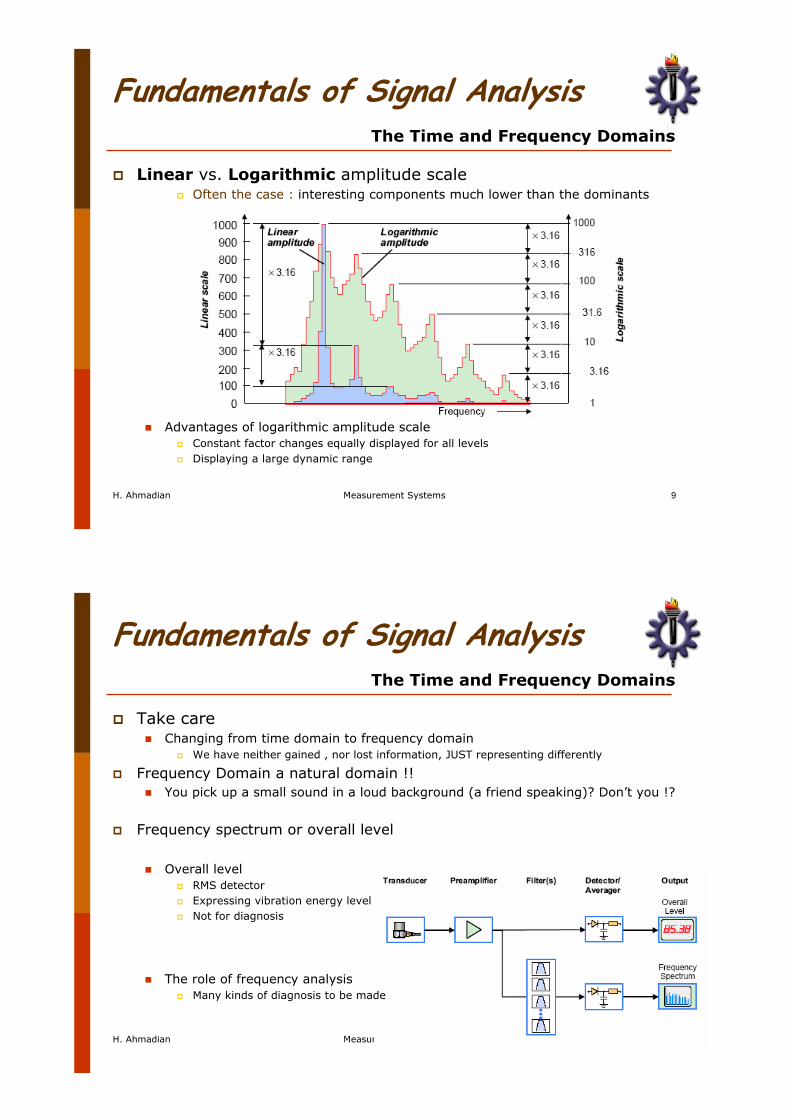
H. Ahmadian Measurement Systems 9
Fundamentals of Signal Analysis
Linear vs. Logarithmic amplitude scaleOften the case : interesting components much lower than the dominants
Advantages of logarithmic amplitude scaleConstant factor changes equally displayed for all levelsDisplaying a large dynamic range
The Time and Frequency Domains
H. Ahmadian Measurement Systems 10
Fundamentals of Signal Analysis
Take careChanging from time domain to frequency domain
We have neither gained , nor lost information, JUST representing differently
Frequency Domain a natural domain !!You pick up a small sound in a loud background (a friend speaking)? Don’t you !?
Frequency spectrum or overall level
Overall levelRMS detectorExpressing vibration energy levelNot for diagnosis
The role of frequency analysisMany kinds of diagnosis to be made
The Time and Frequency Domains
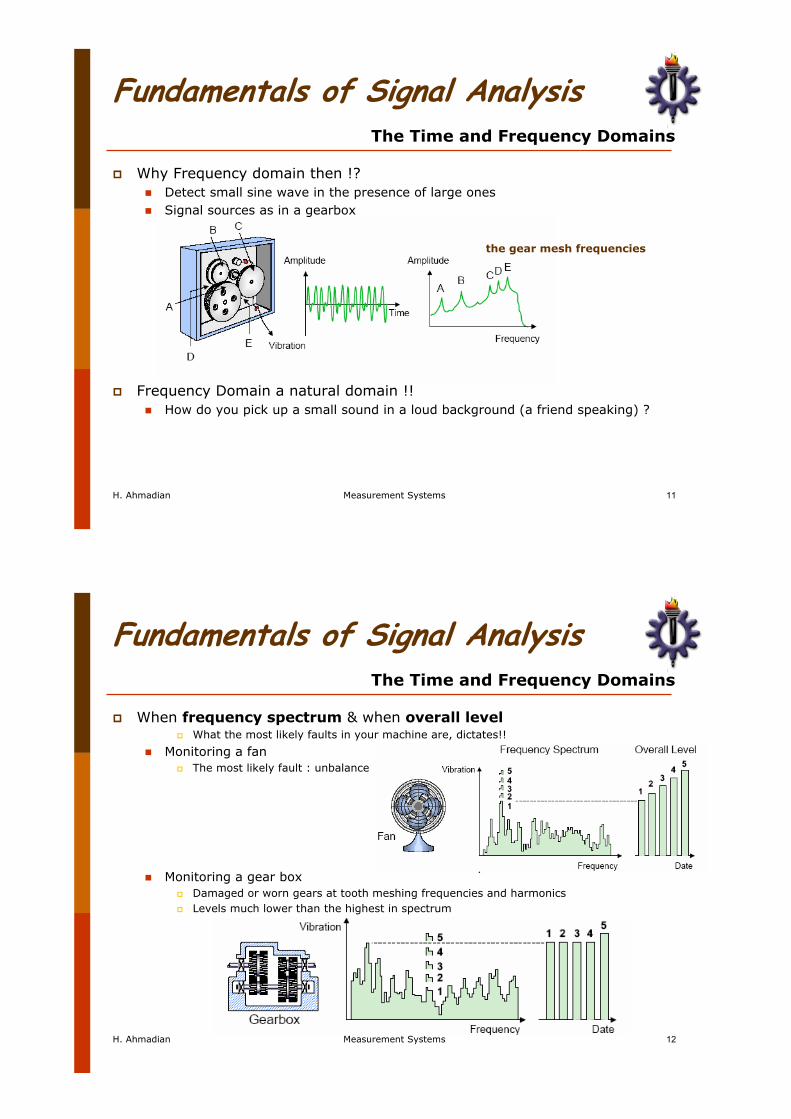
H. Ahmadian Measurement Systems 11
Fundamentals of Signal Analysis
Why Frequency domain then !?Detect small sine wave in the presence of large onesSignal sources as in a gearbox
Frequency Domain a natural domain !!How do you pick up a small sound in a loud background (a friend speaking) ?
The Time and Frequency Domains
the gear mesh frequencies
H. Ahmadian Measurement Systems 12
Fundamentals of Signal Analysis
When frequency spectrum & when overall levelWhat the most likely faults in your machine are, dictates!!
Monitoring a fanThe most likely fault : unbalance
Monitoring a gear boxDamaged or worn gears at tooth meshing frequencies and harmonicsLevels much lower than the highest in spectrum
The Time and Frequency Domains
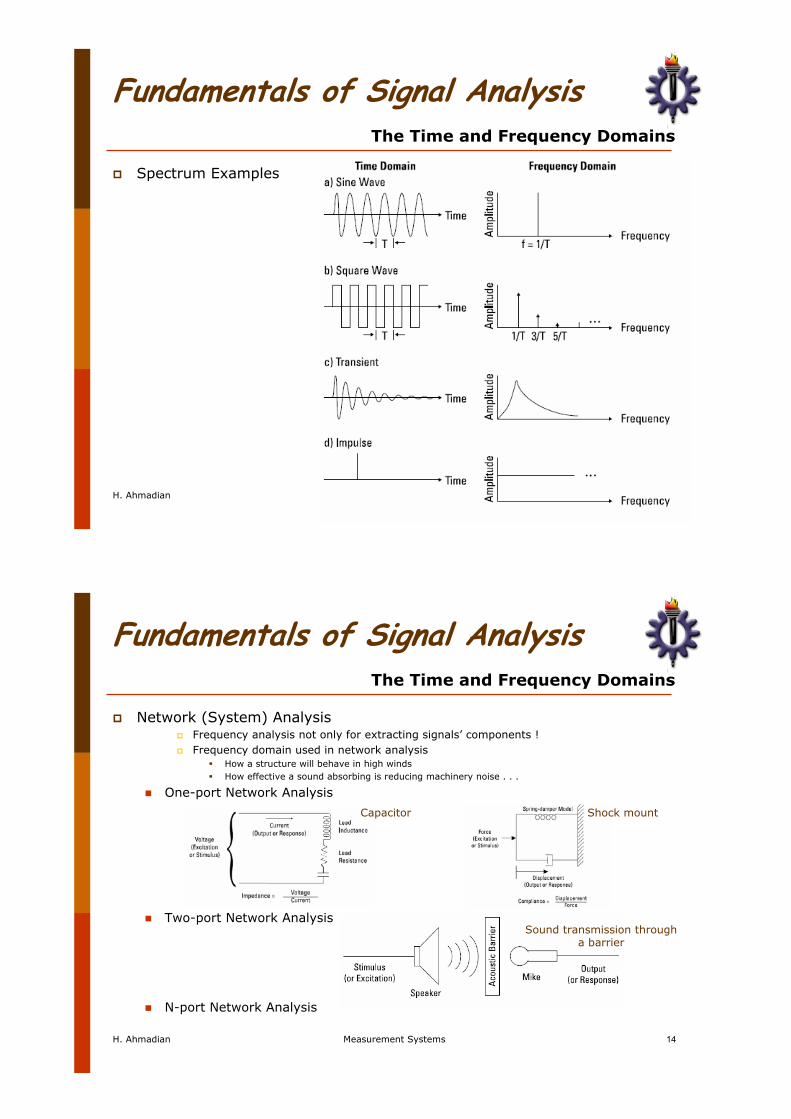
H. Ahmadian Measurement Systems 13
Fundamentals of Signal Analysis
Spectrum Examples
The Time and Frequency Domains
H. Ahmadian Measurement Systems 14
Fundamentals of Signal Analysis
Network (System) AnalysisFrequency analysis not only for extracting signals’ components !Frequency domain used in network analysis
How a structure will behave in high windsHow effective a sound absorbing is reducing machinery noise . . .
One-port Network Analysis
Two-port Network Analysis
N-port Network Analysis
The Time and Frequency Domains
Capacitor Shock mount
Sound transmission through a barrier
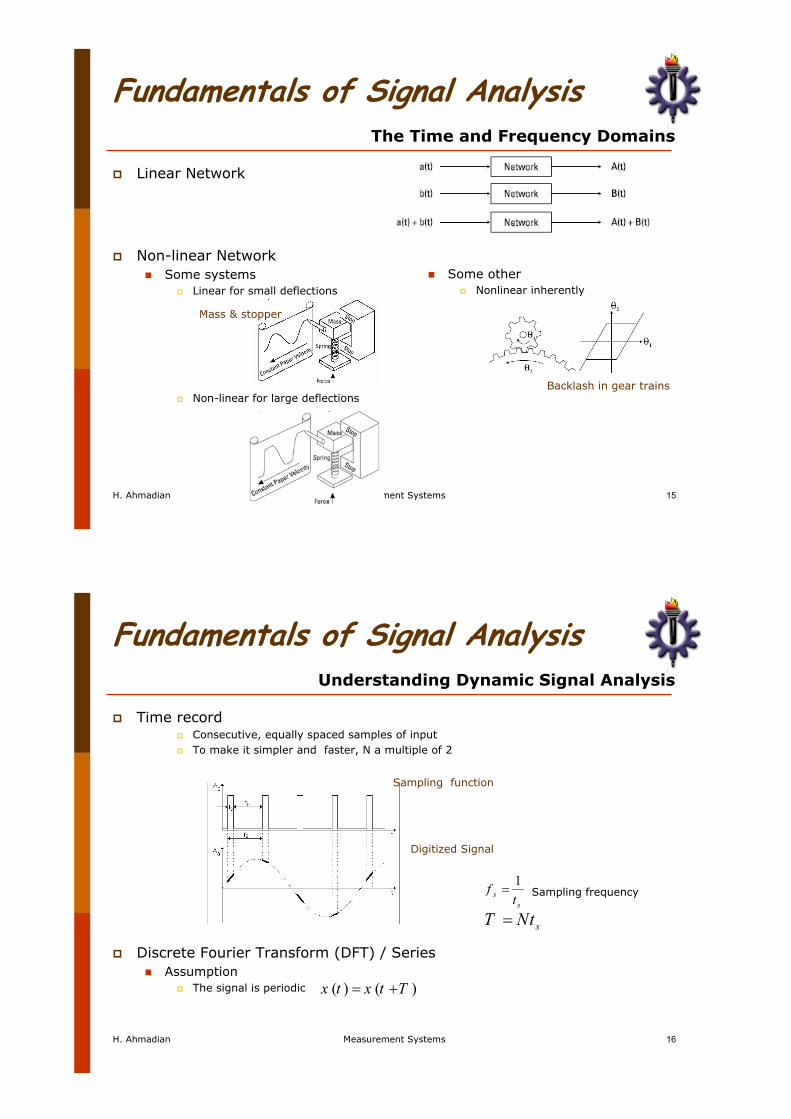
H. Ahmadian Measurement Systems 15
Fundamentals of Signal Analysis
Linear Network
Non-linear NetworkSome systems
Linear for small deflections
Non-linear for large deflections
The Time and Frequency Domains
Some otherNonlinear inherently
Mass & stopper
Backlash in gear trains
H. Ahmadian Measurement Systems 16
Fundamentals of Signal Analysis
Time recordConsecutive, equally spaced samples of inputTo make it simpler and faster, N a multiple of 2
Discrete Fourier Transform (DFT) / SeriesAssumption
The signal is periodic
Understanding Dynamic Signal Analysis
Sampling function
Digitized Signal
1s
s
ft Sampling frequency
sT Nt
( ) ( )x t x t T
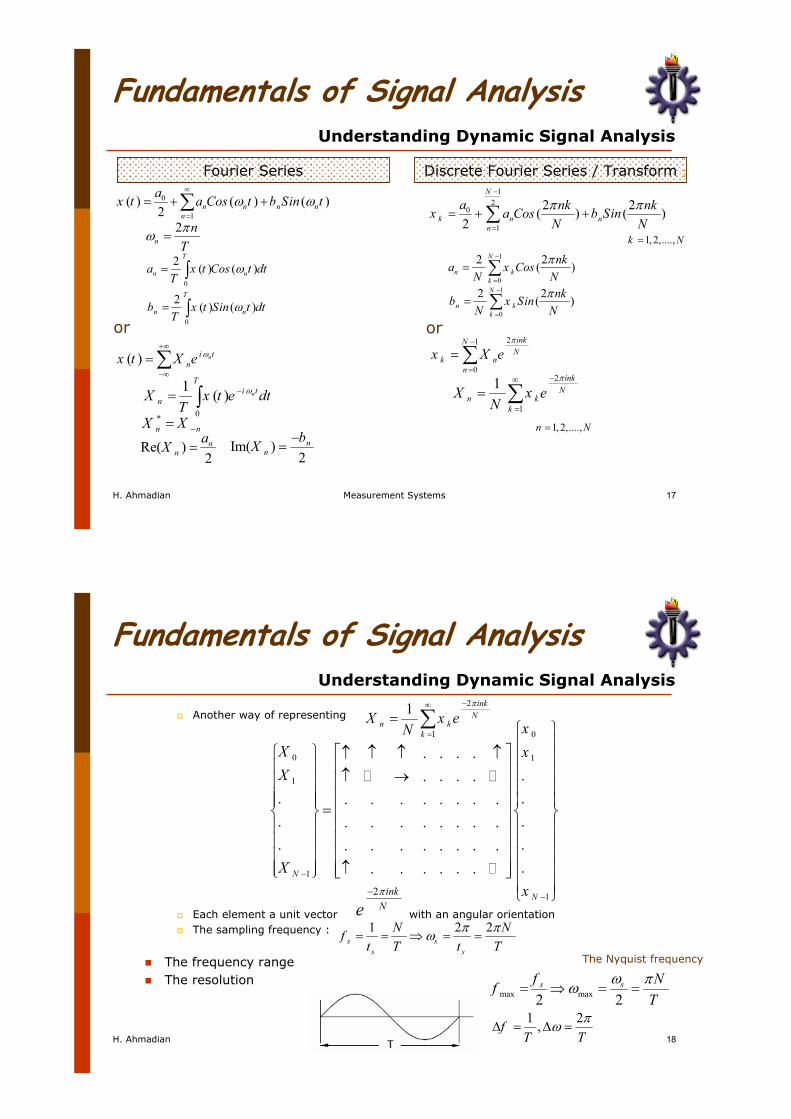
H. Ahmadian Measurement Systems 17
Fundamentals of Signal AnalysisUnderstanding Dynamic Signal Analysis
Discrete Fourier Series / TransformFourier Series
0
1( ) ( ) ( )
2 n n n nn
ax t a Cos t b Sin t
2n
nT
0
2 ( ) ( )T
n na x t Cos t dtT
0
2 ( ) ( )T
n nb x t Sin t dtT
or
( ) ni tnx t X e
0
1 ( ) n
Ti t
nX x t e dtT
*n nX X
Re( )2n
naX Im( )
2n
nbX
12
0
1
2 2( ) ( )2
N
k n nn
a nk nkx a Cos b SinN N
1,2,....,k N1
0
2 2( )N
n kk
nka x CosN N
1
0
2 2( )N
n kk
nkb x SinN N
or21
0
inkNN
k nn
x X e2
1
1 inkN
n kk
X x eN
1,2,....,n N
H. Ahmadian Measurement Systems 18
Another way of representing
Each element a unit vector with an angular orientationThe sampling frequency :
The frequency rangeThe resolution
0
0 1
1
1
1
. . . ... . . .
. .. . . . . . . .
. .. . . . . . . .
. .. . . . . . . ... . . . . .N
N
xX xX
Xx
Fundamentals of Signal AnalysisUnderstanding Dynamic Signal Analysis
2
1
1 inkN
n kk
X x eN
2 inkNe1 2 2
s ss s
N Nft T t T
max max2 2s sf Nf
T
The Nyquist frequency
1 2,fT T
H. Ahmadian Measurement Systems 19
Covered TopicsFundamentals of Signal Analysis
Introduction
Time and Frequency Domains: A matter of PerspectiveThe Time DomainThe Frequency Domain
Understanding Dynamic Signal Analysis
FFT PropertiesSampling and DigitizingAliasingLeakageWindowing