Embed Size (px)
Citation preview

ME 375 System Modeling and Analysis
Section 9 – Block Diagrams and
Feedback Control
Spring 2009
School of Mechanical Engineering
Douglas E. Adams Associate Professor
G(s)
H(s)
-

Key Points to Remember
Block diagrams
Each block is completely independent of the block before and
after it (we assume there is NO LOADING)
Solve for the highest order term and then add blocks and
summing junctions until the equation is realized
Graphical description of algebraic Laplace relationships
Initial conditions are taken to be ZERO (particular solution)
Feedback control
If systems don’t respond the way we like, and if we can’t fix them,
we measure the response and correct for any error
Get there safely, fast, and do not oscillate/overshoot too much
We use feedback control to change the poles and zeros
We use feedback to stabilize, boost performance,
reject disturbances, and reduce sensitivity
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.1

Two Simple Examples First and second order systems
First order systems (e.g. low pass filter, sky-diver)
G(s)
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.2

Two Simple Examples First and second order systems
Second systems (e.g. SDOF system, LCR oscillator)
G(s) M
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.3

Input-output Block diagrams Decomposing G(s)
Sometimes we want to decompose G(s) into its
simplest components:
G(s) M
- -
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.4

Input-output Block diagrams Simplifying G(s) using Mason’s Rule and B.D. algebra
Sometimes we want to simplify combinations of
blocks into a single G(s) block:
- -
+
G(s)
H(s)
- = G(s)
1+H(s)G(s) Mason’s
Rule
+
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.5

Input-output Block diagrams Simplifying G(s) using Mason’s Rule and B.D. algebra
We can choose which simplifications we want to make
by combining certain blocks and pathways:
- -
+
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.6

Block diagrams for a DC motor Coupling between electrical, magnetic, and mechanical domains
How do we do this for coupled systems? (e.g., motor)
-
+
-
+
-
+
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.7

Example Vehicle speed control system
(demo)
-
+ + -
t
v(t) Increasing grade
Disturbance
Assumptions
Input/excitation
Output/response
S.S. error
Apply disturbance
Transient response
S.S. response
- Reduce response time - Reduce S.S. error
- etc.
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.8

Why Use Feedback Control? Getting from point A to point B in the right way
How do we get the system to respond the way we like?
A
B
G(s)
H(s)
-
+
Take system
from here…
Unstable
Too long
Too much
oscillation
Just right
To here
Stability
Speed
Accuracy
Forward T.F.
Feedback T.F. Open-loop T.F.
Closed
Loop T.F.
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.9

A Practical Example of Feedback Control Making the grade – How hard should we study?
CLOSED-LOOP T.F. (w/ grades)
-
+ Study time
Performance
Error Plant
Graders
Control law
What happens if
is large?
We get the grade
we wanted and it doesn’t
matter how hard the exam
is, in theory !
OPEN-LOOP T.F. (w/o grades)
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.10

Feedback Control and Block Diagrams S.S. error, disturbance rejection, sensitivity, and performance
In a servomechanism, we’d like to specify a position and
get there quickly and accurately:
- + + +
Plant
Steady state Disturbance
Sensitivity
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.11

Benefits of Feedback Control
Stabilizes unstable systems (HIGHEST PRIORITY!)
Reduces the effects of any disturbance
Reduces sensitivity to system parameters
In plant and control system
Enhances response characteristics
Speed of response (bandwidth)
Settling time
Percent overshoot
Reduces steady-state error
Regulation (keep it in one place)
Tracking (move it along a certain path)
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.12

Open-loop and Closed-loop Changing system behavior without changing the system
The system, or “plant”, may not respond the way we’d like
- -
+
Rl
Im
x
x
Poles
x
x
Poles we
want
How do we get to the poles?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.13

Closed-loop System with Sensors and Actuators Getting to the poles…through feedback
The key to the poles is in the internal feedback loops
We get the new poles
by measuring the velocity and position,
and feeding that information back
- -
+
-
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.14

Feedback Control Vehicular speed control with unity feedback
OPEN-LOOP T.F.s
-
+ + -
CLOSED-LOOP T.F. (w/o disturbance)
Sensitivity
to M? S.S. error?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.15

Feedback Control First order thermal environment control – an electric thermos
OPEN-LOOP T.F.s
-
+ +
Usually make these the same
R1 qi(t)
CLOSED-LOOP T.F.
Sensitivity
to Ta? S.S. error?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.16

Feedback Control Servomechanism – speed control
By measuring the error, we can compensate for it!
- +
-
+
SPEED CONTROL
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.17

Feedback Control Servomechanism – speed control
-
+
OPEN-LOOP T.F.
CLOSED-LOOP T.F.
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.18

Feedback Control and the F.V. Theorem Servomechanism – speed control for step inputs
-
+
OPEN-LOOP T.F.
CLOSED-LOOP T.F. For large KP and Ko = Ki
Input speed
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.19

Fluid-Level Control Block diagram generation
wi
C1
R1
C2
R2
- +
-
+ +
Hoover Dam What if Rj goes to zero or infinity?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.20

Fluid-level Control Block diagram reduction
- +
- + +
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.21

Fluid-level Control Block diagram (unity) feedback
OPEN-LOOP T.F.
Reference
level
Actual
level
Error signal
Actuation (control) signal
CLOSED-LOOP T.F.
-
+
Plant
Unity feedback
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.22

Steady-state Performance Servomechanism – Speed control vs. Position Control
-
+ TYPE 0
How can S.S. error go to zero?
-
+ TYPE 1
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.23

System Type – S.S. Error
Etc.
TYPE 0
Nonzero S.S. error
TYPE 1
Zero S.S. error
STEP
TYPE 1
Nonzero S.S. error
TYPE 2
Zero S.S. error
RAMP
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.24

Steady-state Error Changing the system type using the control law
-
+ +
CLOSED-LOOP T.F.s
R1 qi(t)
How do we get zero S.S. error?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.25

Transient Performance Getting there quickly and in the “right” way
The plant responds according to the locations of its poles
- -
+
Im
Rl
x x
Poles
x
x
Poles we
want
1
Time [s]
y(t)
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.26

Transient performance Poles locations and transient response performance
The plant may not respond the way we’d like
- -
+
Rl
Im
x x x
x x x
x x
x
x
x
x
x
x
x
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.27
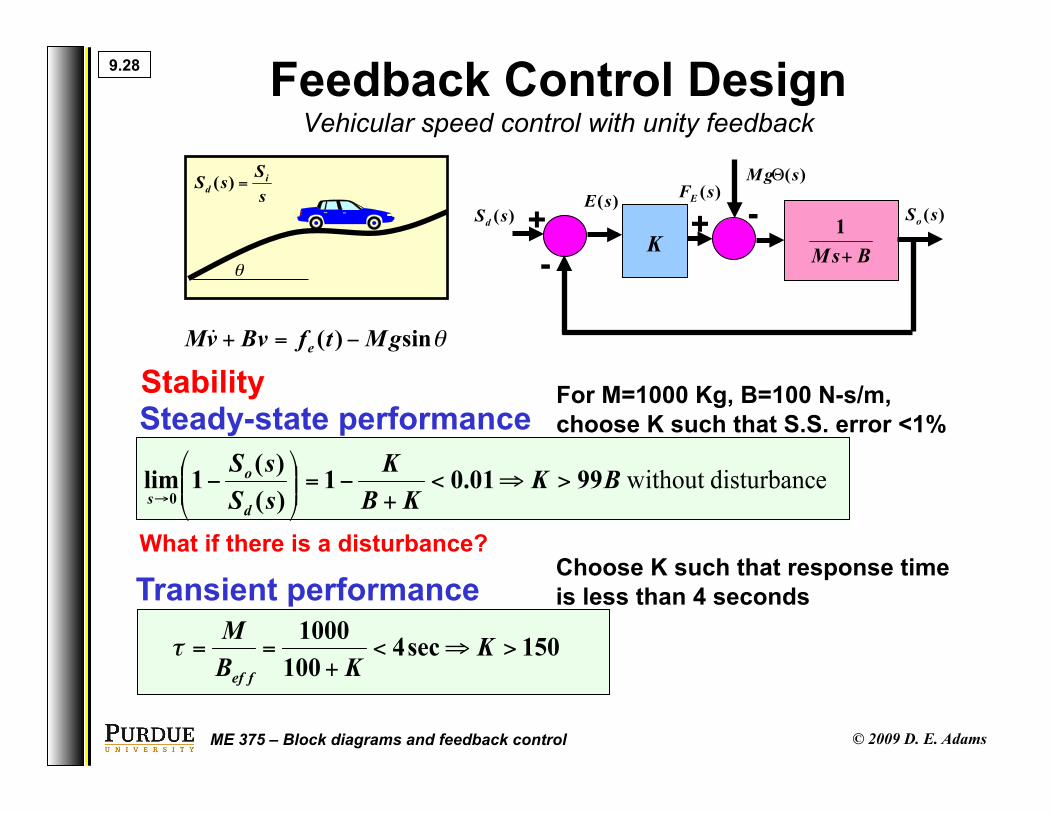
Feedback Control Design Vehicular speed control with unity feedback
-
+ + -
Transient performance Choose K such that response time
is less than 4 seconds
Steady-state performance Stability For M=1000 Kg, B=100 N-s/m,
choose K such that S.S. error <1%
What if there is a disturbance?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.28

Feedback Control Design Servomechanism – Proportional speed control
- +
OPEN-LOOP C.E.
Open-loop
CLOSED-LOOP C.E.
Closed-loop
What if we want
to change the damping (simult.)?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.29

Feedback Control Design Servomechanism – Proportional-derivative speed control
- +
CLOSED-LOOP C.E.
Closed-loop
Rl
Im
x x
x
x
x
x
O.L.
C.L. w/
KP
C.L. w/
KP,KD
Does this
Make sense?
What about the
S.S. error?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.30
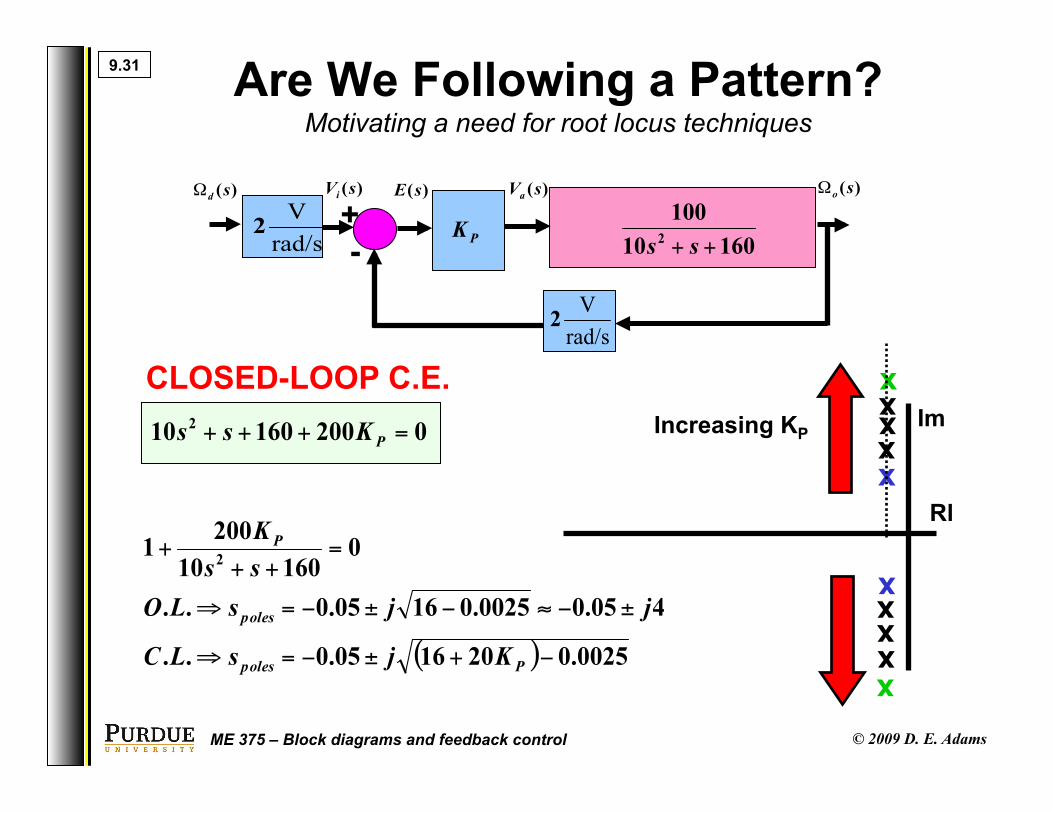
Are We Following a Pattern? Motivating a need for root locus techniques
- +
CLOSED-LOOP C.E.
x
Rl
Im
x
x
x
x x x
x x x
Increasing KP
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.31

- +
CLOSED-LOOP C.E.
Rl
Im
x x
x
x
O.L.
C.L. w/
KP,KD
x x x
x x x
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.32
Are We Following a Pattern? Motivating a need for root locus techniques

Root Locus Plotting the poles of the closed loop system
The characteristic equation changes when we close
the loop:
Rl
Im
-
+
X X
!
Gc (s)Gp (s)H(s) = "1
#Gc (s)Gp (s)H(s) = n180o
Gc (s)Gp (s)H(s) =1
Angle criterion
Magnitude criterion
OL poles
CL poles
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.33

Root Locus Rules for plotting root loci
Get the characteristic equation, in the following form:
Start at the OL poles, end at the OL zeros or infinity
# of paths = # of OL poles
Root loci are symmetric about the real axis and can’t cross
Root loci lie on the real axis to the left of an odd
number of real poles and/or zeros
Break away/in points are found
from dK/ds=0
Asymptotes go out at the angle
Rl
Im
X X OL poles
O
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.34

Root Locus Two poles with unity feedback and proportional control
Rl
Im
X X
symmetric
To left of 1 pole
Servo-position control
System The system never becomes
unstable even for infinite gain
-
+
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.35

Root Locus Two poles with proportional control and sensor dynamics
Rl
Im
X X X
symmetric
To left of 3 poles To left of 1 pole
OL poles pull the root loci to
the right (Why? Bode?) (I.e. they destabilize the CL system)
Servo-position control system with 1st order sensor dynamics
-
+
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.36

Root Locus Two poles with sensor dynamics and prop./deriv. control
Rl
Im
X X X O
symmetric
To left of 3 poles/zeros To left of 1 pole
End at OL zero
OL zeros pull the root loci
to the left (why? Bode?) (i.e. they stabilize the CL system)
-
+
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.37

Rl
Im
X X X O
symmetric
To left of 3 poles/zeros To left of 1 pole
End at OL zero
OL zeros pull the root loci
to the left (more this time---why?) (i.e. they stabilize the CL system)
-
+
Root Locus Two poles with sensor dynamics and prop./deriv. control
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.38

PID Control Steady-state and transient performance using PID
The plant may not respond the way we’d like
- +
Speed, freq.,
SS acc.
SS acc. (- phs.)
Trans./damping
(+ phs.)
- +
- +
- + +
Remember these?
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.39

Satellite Attitude Control A second order system with a double integrator
Rl
Im
X X
EOM
OLTF
Analysis: 1) What does the step
response look like? 2) What is the SS error?
3) Is this acceptable?
Plant poles
Control: 1) We want zero SS error in the step resp.
2) We want an overshoot of < 50% 3) We want a settling time of 10 sec
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.40

Satellite Attitude Control What about proportional control?
Rl
Im
X X
CLTF
CL poles
This isn’t good enough…we get zero SS error (w/o dist.),
but we can only choose the natural frequency – we don’t even have a damping ratio
1) Root loci are symm.
about the real axis 2) Loci approach OL zeros
or Infinity at angles of
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.41

Satellite Attitude Control What about proportional-derivative control?
Rl
Im CLTF
CL poles
1) ! Root loci lie on real axis
to left of odd # of OL poles/zeros 2) Root loci are symm.
about the real axis 3) Loci approach OL zeros
or Infinity at angles of
Can you find
this point?
What’s next?
X X O
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.42

Satellite Attitude Control Designing the control law
Rl
Im
CLTF
CL poles
X
X
What if we want to draw
the loci for varying KP?
X X O
© 2009 D. E. Adams ME 375 – Block diagrams and feedback control
9.43





























