-
Chapter 1 Static Force Analysis
When the inertia forces are neglected in comparison to the
externally applied load, one may go for static
force analysis. If the body is under equilibrium condition, then
this equilibrium is known as static
equilibrium and this condition is applicable in many machines
where the movement is relatively slow.
These include clamps, latches, support linkages, and many hand
operated tools, such as pliers and cutters.
In case of lifting cranes also, the bucket load and the static
weight loads may be quite high relative to any
dynamic loads due to accelerating masses and hence one may go
for static force analysis.
When the inertia effect due to the mass of the components is
also considered, it is called dynamic force
analysis.
Applied and Constraint forces:
When two or more bodies are connected together to form a group
or system, the pair of action
and reaction forces between any two of the connecting bodies is
called constrained forces.
These forces constrain the connected bodies to behave in a
specific manner defined by the nature
of the connection.
Forces acting on this system of bodies from outside the system
are called applied forces.
Electric, Magnetic and gravitational forces are example of
forces that may be applied without actual
physical contact. But most of the forces we are concerned in
mechanical equipment occur through direct
physical or mechanical contact.
External force
Constraint forces
T
F4
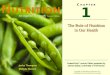
Figure 1: Four bar mechanism showing external and constraint
forces
Constraint forces of action and reaction at a mechanical contact
occur in pairs and thus have no net force
effect on the system of bodies being considered.
When a part of the body is considered in isolation the effect of
such force is considered by using the
freebody diagram.
Characteristics of a force are its magnitude, its direction and
its point of application
1
-
Two equal and opposite forces along two parallel but
noncollinear straight lines in a body cannot
be combined to constitute a single force and they constitute a
couple. The arm of the couple is the
perpendicular distance between their lines of action and the
plane of the couple is the plane
containing the two lines of action.
The moment of the couple M is a vector directed normal to the
plane of the couple and the sense
of M is in accordance to the right-hand rule for rotation.
The moment of couple
= BAM R F
The value of M is independent of the choice of the reference
point about which the moments
are taken, because the vector is the same for all positions of
the origin. BAR
As the moment vector M is independent of any particular origin
or line of application, hence it is a free vector.
Figure 2
B
A
F
F
Free-body diagram A free body diagram is a sketch or drawing of
the body, isolated from the rest of the machine and its
surroundings, upon which the forces and moments are shown in
action. In case of the four bar mechanism
shown in figure 1 the free body diagram of link 3 is as shown
below.
43F 23F C
B
Free body diagram of link 3
2
-
When a link or body is subjected to only two forces it is called
a two-force member and when it is subjected to 3 forces it is
called a three-force member. Similarly one may consider multi-force
member also.
Static equilibrium: A body is in static equilibrium if
the vector sum of the forces acting on the body is zero i.e., =
0F
the vector sum of all the moments about any arbitrary point is
zero i.e., = 0M
Hence a two force member as shown in figure 3(a) will be in
equilibrium if (i) both forces are equal and opposite and (b) their
line of action coincide. If the forces are equal and opposite but
not collinear as shown in Figure 3(b) they will form a couple and
body will start to rotate. Hence these two forces should be equal,
opposite and collinear.
1F2F
1F1F
2F
(c) (b) (a)
2F
Figure 3. Equilibrium of a two force member
Similarly a three force member will be in equilibrium if the
vector sum of all these forces equal to zero
and to satisfy the vector sum of all the moments about any
arbitrary point equal to zero, their line of
action should meet at a point.
1F2F
3F (b)
O
(a) 3F
2F 1F
O
2F
1F
3F
(c)
Figure 4: Equilibrium of three-force member
3
-
Figure 4(a) shows a body subjected to three forces Also the line
of action of coincide at point O. Hence the resultant of must pass
through point O and it should
be equal and opposite to force . Hence for equilibrium, line of
action of should pass through point
O as shown in Figure 4(b). In figure 4(c) the forces are shown
to form a close polygon (triangle) and one may use Lamis theorem
(sine rule of tringle) to find the unknown forces if atleast one
force is known both in magnitude and direction and the line of
action of one more force is known. According to this
theorem
1 2 3, and .F F F
1 and F 2F 2F1 and F
3F 3F
31 2
sin sin sinFF F
= =
where , and are angle as shown in figure 4(c).
For more than three forces one may draw force vector polygon or
resolve the forces and moments to get
the required force components.
To find the constraint forces in a mechanism one may either go
for analytical or graphical method of
solution if the maximum number of forces in a member is limited
to three and if the system has more than
three force members one should go for analytical methods.
Example 1: Find the bearing forces and the torque required for
static equilibrium of the four bar
mechanism shown in fig 1.
Solution:
Analytical: For Planar mechanism , 0= XF 0= YF and 0= ZM .
Step1: Let us first write all the quantities in vector form
jABiABRAB sincos 22 +=K
23F 43F C
BjBciBCRCB sincos 33 +=
K
jCDiCDRDC sincos 44 +=K
Free body diagram of link 3
jDQiDQRQD sincos 44 +=K
Similarly
jPiPP sincos +=G
4
-
Here link 3 is a two-force member and at this stage we know only
the line of action of the forces
which should be along the line BC. 23 43and F F
34F p
D
14FG
C
Free body diagram of Link 4
Link 4 is a three-force member in whih force P is completely
known and the line of action of force
which is equal and opposite to is known. Only the point of
application of force , which is at point
D, is known. As link 4 is a three force member, taking moment
about D,
34F
43F 14F
0= ZM 034 =+ PRFR QDCDGGGG
As P is completely known one may obtain 34FG
One may note that link 3 is a two-force member, so 344323
FFFGGG
==
Link 2 which is acted upon by two forces i.e., 12FG
and 32FG
, and the external applied torque, will be in
equilibrium only if = - 12FG
32FG
, i.e., these forces are equal and opposite and the resulting
moment of the
couple is equal to the applied torque.
Also one may find the torque by taking moment about point A.
Graphical method
As link 4 is a three force member, the line of action of
14FG
should pass through the intersection of the
line of action of P and 34FG
.
Taking proper scale and by drawing the force polygon one may
obtain the magnitude of 34FG
and 14FG
.
Then considering equilibrium of link 3, force 23FG
can be determined.
Then determine the torque taking moment about A.
5
-
When multiple forces act on a mechanism, one may use
superposition theory, which states that in a
linear system, the net effect (e.g., bearing forces or torque)
due to all the forces taken simultaneously will be equal to the
summation of the effects due to individual forces taken one at a
time.
If one wishes to find only the torque acting on the mechanism,
the method of virtual work may be used. It
states the work performed during a virtual displacement from
equilibrium is equal to zero. The
virtual displacement is defined as an imaginary infinitesimal
displacement of the system that is consistent
with the constraints on the system. For example, the constraints
on the slider-crank mechanism are that all
members including the frame are rigid and all joints maintain
contact
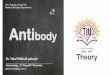
Example 2. Calculate the torque required (assuming no friction
in the bearing) for static equilibrium of an in-line reciprocating
engine in the position when crank angle = 45 deg (from inner dead
center). The dimensions are crank length r =30 mm, connecting rod
length L = 70mm, and the piston force is P = 40
N.
B
A
O
Lr
P
XSolution Here OB is link 1, crank OA is the 2nd link,
connecting rod AB is the 3rd link and the piston is the 4th
link.
Crank radius r =30 mm, Length of connecting rod =70 mm
Letting
-
It may be observed that link 3 is a two force member and
subjected to forces 23FThe free-body diagram of link 4, i.e., that
of piston is shown below. For the present case, it is a three-
force member subjected to a force due to gas pressure, vertical
reaction force and force of connecting rod on piston ( ) at the
gudgeon pin. Force is known completely both in magnitude and
direction and the line of action and point of application of
force is known. Now drawing the force
polygon as shown in Figure (b) one will be able to find the
unknown forces and .
P 14F
34F P
34F
14F 34F
P
14F
34F
14F 34F
P
Figure 5 (a) Free-body diagram of link 4 (b) force polygon
Now one may use a vector method or use simple algebraic
calculation using Lamis theorem to find the
forces. Also one may use graphical method to fid the same. All
these methods are described briefly below
Vector method
As , 14 340, hence, 0F P F F= + + =
=34 14 So, (0.953 0.303 ) 0i j F Pi F j +
Equating the ith and jth compoment of the forces one may
obtain
34
14 34
40 41.973N0.9530.304 12.72N
F
F F
= =
= =
Hence and 34 41.973 342.35 NF = 14 12.72 90 NF = .
Using Lamis formula from the force diagram shown in Figure (b)
34 14
sin 90 sin sin(90 )F F P
= =
7
-
Hence
3440 41.974 N
sin(90 17.64)F = = and
8
1440sin(17.64) 12.72 N
sin(90 17.64)F = = .
23 43F F=
23F
B
A
43F
Now considering free-body diagram of link 3
But, 43 34 41.974 342.35F F= =
So 23 43 41.974 342.35F F= =
Considering equilibrium of link 2
Link 2 is subjected to forces . For equilibrium these two forces
must be equal and opposite. But as they are acting at A and O
respectively they will form a couple which will try to rotate the
link OA
in anti-clock wise direction. Hence for static equilibrium a
torque T must be applied in clockwise
direction whose magnitude should be equal to the couple formed
by these forces.
32 12 and FF
32F
12F
T
Now 32 23 41.974 342.35 40 12.7265F F i= = = + jj32 ( ) (21.213
21.213 ) ( 40 12.73 )
= -1118.56
AOT R F i j ik
= = + +
Negative sign indicate the applied torque should be applied in
clock-wise direction.
Static force analysis with friction As we are considering only
simple mechanisms with prismatic and revolute joints, the effect
due to dry or Coulomb friction and greasy friction at the journals
are discussed. Consider a pair of sliding surfaces as shown in
figure **. When a force is applied on the block to move it towards
right, a friction force is
generated which oppose this motion. According to Coulombs law,
the magnitude of this force for
impending motion is
F
R , where R is the reaction force due to weight . WW
F
R
R
Figure 6
-
Greasy friction at a journal
Generally greasy or boundary lubrication type friction force
occurs in heavily loaded, slow running
bearings. Figure 7 (a) shows a journal inside a bearing during
static condition. Here A is the contact point and the weight of the
journal W
and the reaction force R act in the vertical directions as shown
in the
figure. Now let us consider a torque T is applied to the journal
in the clockwise direction. The friction force will now oppose this
motion and so the contact point between the bearing and the journal
shifts to point B as shown in figure (b). The resultant ( R ) of
the normal reaction force ( nR ) and the friction force
( nR ) at B should be equal and opposite to the weight as the
journal is under static equilibrium condition. These two forces
will form a couple in anticlockwise direction, which will oppose
the applied
torque.
Let OC be the perpendicular distance between . If one draw a
circle with radius OC and center
at O, the reaction force will be tangent to that circle. This
circle is known as friction circle. Now to find
the radius of the friction circle, consider the triangle OBC.
Here OC = OB sin
and W R
where is the angle
between the resultant and normal reaction force. Also the
coefficient of friction tan = . Hence radius
of the friction circle = 2/( (1 )).fr r = + where r is the
radius of the journal. For small value of ,
.fr r= Friction couple = 21f
Wrr W Wr
=
+ .
A
W
T
C r
nR R
B
R
W
n(a)
O O
Lubricant
Journal
Bearing
R
(b)
Figure 7 (a) Journal in static condition (b) Journal when a
torque is applied to start the motion.
9
-
Example 3: Determine the torque required at the crank and also
bearing forces in a slider-crank mechanism when the inertia forces
are neglected. Also develop a matlab code for the same.
User Specified Parameters
Crank Length = R1Connecting Rod Length = L1Radius of Journal =
R
Coefficient of friction =
Piston Force = P
Angle of the crank =
Calculations:
Radius of friction circle = R2 = 2/ (1 )R + To find angle that
connecting rod makes with horizontal 3
L1/ sin=R1/sin(180-3) Performing Force analysis on the
connecting rod :
10
-
Free body diagram of crank:
Free Body diagram of slider:
Force of reaction by connecting rod on slider = F (Combination
of forces F5 & F6) Reaction force because of friction between
ground and slider = Rxn (combination of Normal reaction NN and
friction f) The following figures show the forces acting on the
connecting rod, a combination of forces F5 and F6
11
-
Out of these only the figure 1 shows the correct direction of
forces. This can be understood by consulting
the initial figure. The tendency of the friction in the bearing
is to increase 3 .the tendency of the friction
in bearing connecting crank and connecting rod would be to
increase 2.thus the force direction of the
link reaction force can be found out. The angle made by reaction
force with connecting rod can be
found out using friction circle radius.
tan = R2/(L1/2) Angle made by reaction force with horizontal =
3-
Force on bearing connecting crank and connecting rod F (Vector)
From the code we find the magnitude of the link force and its
direction.
Torque due to this force = R1 x F (Vector Product) Matlab
code:
R1=0;
while (R1
-
end
end;
L1=R1;
while (L1=(R1/10)) fprintf ('not acceptable value, enter agn')
else break
end
end;
C=1
while (C>=1) C=input ('enter the coefficient of friction=');
if (C>=1) fprintf ('not acceptable value, enter agn') else
break
end
end;
P=input ('enter the piston force='); Tht= input ('Enter the
value of angle considered(degrees)='); %R2=radius of journal
bearing Tht = Tht*pi/180;
R2= (C*R)/ sqrt (1+C^2) A= atan ( (2*R2)/L1) Tht3= asin
((R1/L1)*sin(Tht)) %Angle made with horizontal B
fprintf('the angle made by rxn force with horizontal') B=
180*(Tht3-A)/pi fprintf('the value of link rxn force=')
13
-
F=P/(cos(B)+sin(B)*C) Rxn = (F*sin (Tht))/cos (atan(C));
fprintf('the value of torque=') T= F*R1*sin (Tht + B)
Example 4. Calculate the torque required (assuming no friction
in the bearing) for the static equilibrium of an in-line slider
crank mechanism in the position when crank angle (from the inner
dead center). The dimensions are, Crank length =30 cm, Connecting
rod length=70 cm and the piston force = 40N. Also find the torque
required assuming that the co-efficient for all bearing is 0.1. The
three journal bearings all have radii of 10 mm, and the crank is
rotating in the clockwise.
045=
Solutions: Given data:--
045= Crank length (link OA) =30 cm. Connecting rod length (link
AB)=70 cm. And the piston force (P)= 40N.
045=
From the figure, and using the sine rule. We can write,
0
0
sin sin30
sin sin 45 0.30370
17.64
AB OA
=
= =
=
Case (I):----
14
-
Without friction Considering the link4, and using static force
analysis,
34
34 14
34 14
cos 40& sin
,
41.97 ,& 12.12
F PF F
ThereforeF N F N
= =
=
= =
Also, 34 43F F= (equal and opposite reaction) 43 4341.97F N= =
F
Considering the link 3.
Since link 3 is a 2-force member,
23 43
23
,
41.97
ThereforeF F
F N
=
=
And also, we can write,(By equal and opposite reaction)
15
-
32 23
32 41.97F F
F N=
=
Considering link 2.
Now the torque due to reaction force is given by, 32
0 0 0.03(cos 45 sin 45 ) 41.97( cos sin )
1.112
T r F
T i j iT kN m
j =
= + +
=
Case (II):-- With friction,
Consediring the link 4.
Radius of friction circle, is given by21
fr
r
=
+
Where, r= 10, and =0.1
2
0.1 10 0.991 (0.1)f
r
=
+
the angle is given the angle by which the reaction force hift
and is determined by =tan-1=5.71 Now, Since the rotation of the
crank is clockwise direction, thus the angle r will decreased and
simultaneously, angle , angle will increased and deceased. Also the
piston (link 4)
16
-
Will move toward the X-axis (to the right). Thus the direction
will be towards left & thus =+5.71(according to the figure)
Also the force F34 can act in two ways shown in below.
Since the angle is the decreasing and friction will tends to
oppose it. Thus force F34 will act in the orientation (i).
Considering the link (3) Since the link 3 is a 2-force member,
then this link can be showed the four possible force
situations.
Same way as above, the forces F43 and F23 will act in the
orientation (iii). Similarly, we can write for the link 2.
A
D
// B
Now we have to find
17
-
1 1
0
0.9917.64 tan ( ) 17.64 tan ( ) 1635
16
fr
DB0
=
= = = =
=
Now considering link .4. 34 14
34 14
34
14
cos sin&
sin cos,
42.8411.87
F P F
F FThereforeF NF N
= +
=
=
=
34 43 23 32 42.84F F F F= = = = N as in case (I) considering no
friction. Considering link.2.
Torque 32
0 0 0 0.03(cos 45 sin 45 ) 42.84 ( cos16 sin16 )
1.124
T r F
T i j iT kN m
=
= + +
=
0
Example 5: Determine the driving torque available on the crank
of a slider-crank mechanism, if a force of 2000 N pointing towards
the main bearing is applied horizontally to the piston. Length of
the crank and the connecting rod are 10 and 30 cm respectively. At
the instant considered the crank has rotated 60 degree (CCW) from
the inner dead center. Take coefficient of friction between all the
pairing surfaces as 0.13. The diameter of the main bearing, crank
pin and piston pin are respectively 10, 6 and 6 cm. Also find the
driving torque in the absence of friction using virtual work
principle.
Solution: Considering the friction in all turning and sliding
joints:
18
-
l=300 mm
r=10
0 mm
A
B2000 N
Impending motion
32
42O
Figure 1
Now angle of friction in joints, = tan-1() = tan-1(0.13) = 7.407
o. Radius of friction circle, sinhr f =
For the crank pin and gudgeon pin, rf = 60 sin = 7.735 mm
For the main bearing of diameter 100 mm, rf = 12.89 mm.
figure 2
Figure 3
mmr f 735.7= 34Fo72.19
dN2000
23F43F
mml 300=
13F
Consider the link 2 (figure 2), 300/(sin) = 100/(sin)
= 16.778 o. Now, from the figure, d = tan-1(7.735/150) = 2.95
o
Now the Free body diagram of the piston is shown in figure 3,
The force equations are (F14 can be divided into their frictional
and normal components),
0.13 N +F34 cos19.72o = 2000 where N is the normal force acting
and F34 sin19.72o = N F34 =2030 N
19
-
We know, = 180-(+) = 103.23o. (103.23+2.95) From the figure
4,
Now the resisting couple, equal to F32 d having a clockwise
direction. Torque = F32 d = 2030 0.10355 = 210.21 Nm.
103.55 mm
3
100 mm
12.89mm
Figure 4
32F
12F
In the absence of friction using virtual work principle:
od 23=
o60F
According to principle of virtual work, F dx = T d T = (F dx) /
d From the figure, dx= 42.93 mm and d = 23o = 23/180 rad. Now, T =
(20000.042) / (23/180) = 209.254 Nm. (answer)
20
-
Example 6: Determine the required input torque T1 for the static
equilibrium of the four bar mechanism shown in the figure. Forces
F2 and F3 have magnitudes of 50 N and 75 N, respectively. Forces F2
acts in the horizontal direction. Use both graphical and analytical
methods. AB=30 cm, BC=40 cm, CD=50 cm and the fixed link AD=75 cm
and CE=15 and CF= 20cm.
D
C E
A
B F
450
450
Solution: Given data: -- AB=30 cm, F2=50 N, F3=75 N, BC=40 cm,
CD=50 cm, AD=75 cm, CE=15 and CF= 20cm
Let link AB is rotating in counterclockwise with rad/s Then,
Vb=30 cm/s. One may obtain the velocity of different points on the
mechanism by using , graphical method, vector method, complex
number methods etc. Here,
0
0
20
3
13.33 284.28 26
5075 45
E
c
VVF iF
=
=
=
=
Resolving the velocities at E and F, parallel and perpendicular
to the applied forces at these positions respectively.
1 11.67 ,eV = Parallel to the F2 1 3.81 ,fV = Parallel to the
F3.
Assuming T to be counter clockwise and applying principle of
virtual work 3 3
3 3
3.81 3.81 03.81 3.81
297.75 297.75Nm
T F FT F FT Nm
+ =
=
= =
Alternatively, one may use dot product to find the virtual work
done as follows.
2 3. .
( 50 ).(13.33 cos 28 13.33 sin 28 )
(75 4.28 )(cos 45 sin 45 ).(cos 26 sin 26 )
E cT F V F V
i i ji j i j
= +
= +
+ + +
21
-
588.484 303.51284.97Nm
TT =
=
Analytical Method:---
0 0 023 43 2
cos 20 sin 20 cos 64 sin 64 0F i j F i j F i + + =
F
Equating the i component of the equations, we have, 0 0
23 43 2cos 20 cos 64F F+ = Equating the j part of the
equations:-
0 023 43sin 20 sin 64F F=
0 0 023
23
cos 20 sin 20 cot 64 5045.187
F
F
+ =
=
1 1
2 2r i = +
j
23aT r F=
( ) 0 00 0
30 45.187( cos 20 sin 20 )
230 30( 45.187sin 20 ) 45.187cos 20
2 2572.9055
i j i j= +
= +
=
0 0 0 034 3 14
cos33 sin 33 cos 45 sin 45 cos58.5 sin 58.5 0F i j F i j F i j +
+ + =
0 0334 14
0 0334 14
0 0 034 14
14 34
cos33 cos58.52
sin 33 sin 58.52
(cos33 sin 33 ) (sin 58.5 cos58.5 ),
0.8906
FF F
FF F
F FThereforeF F
=
=
=
=
0
0 034
34 32
,
75cos33 0.8906cos58.5
240.6689 40
Therefore
F
F N F
+ =
= =
We know that,
22
-
0 032
0 0
30 ( )
2,
30 ( ) 40.7 cos33 sin 33
230 40.7 sin 33 cos33 253.86
2
b
b
r i jTherefore
T r F i j
T N
= +
= = + +
= =
By superposition principle, ( ) 572.9055 253.68 319.04a bTotal T
T T= + = = , Ans.
Gear force Analysis
The fundamental law of gearing states that in order to obtain a
constant velocity ratio, the common normal to the tooth profile at
the point of contact should always pass through a fixed point,
called the pitch point. Thus the point of contact of the two gears
has the same velocity. Applying Newtons third law, the force
exerted by one gear to the other at the point of contact is same in
magnitude but opposite in direction. In this section the forces in
spur and helical gears are discussed. Spur Gear In figure 8(a)
shows the pitch circles of a pair of spur gears with center at a
and b and rotating with angular velocities 2 and 3 . The line of
action and pressure angle are
clearly shown in this figure. In figure 8(b) the pair of
constraint forces ( 23F d 32F cting at the pitch point along the
line of action are shown. Considering the freebody diagram of gear
2 as
shown in figure 8(c), the force is balanced by the reaction
force acing at the bearing. As these two forces are equal and
opposite, they will form a couple. To overcome this reaction
couple, the prime mover (say motor) should provide a torque equal
in magnitude but opposite in direction, which is represented by in
the figure.
an a)
32F 12F
a2T
23
-
(a) (c ) (b)
Figure 8 : Force analysis of Spur gear
One may resolve these forces in tangential and radial direction.
Clearly, the tangential force is responsible for rotating the gear.
Now let us derive an expression for the gear forces form the given
power and speed of operation. Let be the speed of rotation (in rpm)
of the gear with module m and number of teeth z. The value of the
pressure angle(in degrees) is and the power (in KW) it transmits be
P. The diameter D of the gear can be calculated as D = m z (a) and
the torque T transmitted by the gears is
660 102
PT
= (b)
From Figure 8(c), we see that the force that is responsible for
transmitting the torque T is the tangential component (Ft32 =Ft23
=Ft). The radial component (Fr32 =Fr23 =Fr) is the separating
force, which always acts towards the center of the gear. Thus we
get
t t
D 2T=T, or, F
2 D=F (c)
So, using equation (c) one may obtain the tangential force Ft
from known value of D and T. From Figure 8(c) the radial component
can be obtained as Fr = Ft tan (d)
Hence the resultant force acting on the gear or on the bearing
equals to 2 2t rF = (F F )+
Also one may note that t rF =Fcos and F Fsin =
24
-
Thus the net force F can be easily calculated using the above
expressions. This analysis of the gear tooth force is based on
certain assumptions which are as follows
1. As the point of contact moves, the value of the resultant
force F changes, which is
neglected in the above analysis. 2. It is assumed that only one
pair of teeth take the entire load. At times there are two
pairs
which simultaneously are in contact and share the load. This
aspect is also neglected in this case.
3. The analysis is valid under static conditions, when the gears
are running at very low velocities. In practice there are dynamic
forces also due to the power transmission. The effect of these
dynamic forces are neglected in the analysis.
Helical gears Like the spur gears, the helical gears also
connect parallel shafts. But a major difference between a helical
gear and a spur gear is that the teeth in case of a helical gear
are cut in the form of a helix on the pitch cylinder. In these
types of gears the contact between the meshing teeth begins with a
point on the leading edge of the tooth and gradually extends along
the diagonal line across the tooth. There is a gradual pick up of
the load by the tooth resulting in a smooth engagement and a quiet
operation even at very high speeds.
nF
tF
rF
aF n
In a helical gear n =normal pressure angle
=helix angle
Figure 9: Force analysis of helical gear
In helical gear the normal force consists of three components
viz., tangential component ,
radial component and the axial or thrust component as shown in
the figure 9. They are
related as follows.
nF tF
rF aF
Tangential force cos cost n nF F = (a) Radial force sinr nF F n=
(b)
25
-
Thrust or axial force = cos sin tana n n tF F F = = (c) Let N be
the speed of rotation in rpm of the gear with module m and number
of teeth z, is the transverse pressure angle and is the helix
angle. Now the diameter D of the gear can be determined from the
relation D = m z (d)
The angular velocity of the gear = 260
N = (e)
The torque T transmitted by the gears can be calculated from the
power P from the relation
P T= (f)
From Figure 9, we see that the force that is responsible for
transmitting the torque T is the tangential component Ft. The
radial component Fr is the separating force, which always acts
towards the center of the gear, and Fa is the axial or thrust
component. The direction of this axial component depends upon
whether the gear is left or right handed, the direction of rotation
and on whether the driving or driven gear is under consideration.
Thus we get
2tDT F= or 2t
TFD
= (g)
It may be recalled that the normal pressure angle n , helix
angle and transverse pressure angle
are related by
tancos
tann
= (h)
Once we have calculated the value of the normal pressure angle
from (h), we can calculate the tangential force from equations (f
and g), axial or the thrust force using equation (c) and radial
component from expression (b). The resultant force on the helical
gear can now be calculated using the three components as
2 2 2( )n t rF F F F= + + a (i) The following guidelines should
be followed while calculating the axial or thrust component Fa
1. Select the driving gear from the pair. 2. Use right hand for
right-handed helix and left hand for left handed helix. 3. Keep the
fingers in the direction of rotation of the gear and the thumb will
indicate the
direction of the thrust component of the driving gear.
26
-
4. The direction of the thrust component of the driven gear will
be the opposite to that for the driving gear.
Example 7 Two helical gears on the parallel shafts have a normal
pressure angle of 20 degrees and a normal module of 6 mm. The
centre distance is 200 mm and the assembly has 20 and 40 teeth. The
gear set transmits 50 KW at a pinion speed of 1200 rev/min.
Determine the tangential, radial and thrust loads on the gear
teeth, and show these forces on the gears. The pinion is handed and
rotates clockwise. Solution: Given data: ---
Normal pressure angle = n =200
Normal module = =6mm. == 21 mm nm
Center distance=C=200mm No of teeth of the pinion=20,
No of the teeth of the gear=40.
212
1 221
4020
rrr
r===
1 1 1 1
2
2002 200 3 200. Hence, .3
400Therefore, 3
r r r r
r
+ = = =
=
Now as C= 21 rr +
27
-
1 2 1 1 2 2 1 2
0
1 1 1( ) ( ) (2 2 2 cos
So, cos 25.8419
nmc d d mT m T T T
= + = + = +
=
)
1 1 1
50kw,12002 ( ) 125.6rad/sec
6050 1000 398.089Nm
125.6
P
w
T w P T
=
= =
= = =
211
398.089 1000 5971.335(200 / 3)T TF N
r
= = =
We know that
12 21 21 12,Hence, 5971.335NT T T TF F F F= = =
cos , cos
sin , sin
T Tn n n n n
r n n a n
F F F FF F F F
n
= =
= =
012 12
21 12
tan 5971.335 tan 25.8419 2892.04532N,
a T
a a
F FF F
= = =
=
012 12 sin 5971.335 tan 20 2173.388Nr T
nF F = = = Ans.
Summery The following points are learned in this chapter
Classification of forces: external and constraint forces
Determination of moments Freebody diagram Two and three force
members Static force analysis using graphical method Static force
analysis using analytical method (vector method) Use of
superposition theory for multiple external forces acting on a
mechanism Static force analysis with sliding and grease friction
(concept of friction circle) Application of virtual work principle
for static force analysis.
28
-
Exercise Problems 1. Draw the constraint forces in all the six
types of lower pairs, viz., (i) revolute or turning
pair (ii) prismatic or sliding pair, (iii) cylindrical pair,
(iv) screw or helical pair, (v) planar or flat pair, and (vi)
globular or spherical pair.
2. Explain with neatly drawn free-body diagram the effect of
friction in the bearings on the torque required by the crankshaft
in a slider-crank mechanism when the crank is rotating in (i) clock
wise direction (ii) anti-clock wise direction.
3. Calculate the torque required for static equilibrium of an
in-line slider crank mechanism in the position when crank angle =
60 deg (from inner dead center). The dimensions are crank length r
= 100 mm, connecting rod length L = 175 mm, and the piston force is
P = 50 N. Assume crank to be rotating in anticlockwise direction.
Use, graphical, analytical and virtual work principle to find the
result.
4. Taking same data as in problem 3, also find the torque
required assuming that the coefficient of friction for all bearings
is 0.1. The three journal bearings all have radii of 20 mm, and the
crank is rotating in the clockwise direction.
5. Figure below shows a mechanism used to crush rocks. The
mechanism is moving slowly, so the inertia forces may be neglected.
In the position shown, determine the torque required to drive the
input link AB when the crushing force acting in the horizontal
direction is 5000N. Here, AB = 50 cm, BC=100 cm, CD=120 cm and the
fixed link AD=150 cm and CE=25 cm and the angle CED of the ternary
link CED is 900. Use (a) graphical method, (b) analytical method
and (c) virtual work principle to determine the bearing forces and
required torque.
5000 N
D A
B
E
450
C
F
29
-
CHAPTER 2 DYNAMIC FORCE ANALYSIS
Inertia force and couple
a
Equivalent off-set Inertia force
iF cI
a
a
a
iF
iFcIiF
iF
iF
-
cI iF
Dynamic force analysis of four bar mechanism
-
Dynamic Force Analysis of a Four bar Mechanism using Matrix
Method
-
Solution procedure
The MATLAB code
%DYNAMIC FORCE ANALYSIS OF FOUR-BAR MECHANISM %TAKING INPUTS
FROM THE USER FOR THE FOUR-BAR MECHANISM a = input('enter the
length of the link AB : '); b = input('enter the length of the link
BC : '); c = input('enter the length of the link CD : '); d =
input('enter the length of the link DA(fixed link) : ');
-
ma = input('enter the mass of link AB : '); mb = input('enter
the mass of link BC : '); mc = input('enter the mass of link CD :
'); ka = input('enter the radius of gyration of link AB : '); kb =
input('enter the radius of gyration of link BC : '); kc =
input('enter the radius of gyration of link CD : '); rga =
input('enter the magnitude of the p.v. of the c.g. of link AB from
the fixed pivot A : '); rgb = input('enter the magnitude of the
p.v. of the c.g. of link BC from the pivot B : '); rgc =
input('enter the magnitude of the p.v. of the c.g. of link CD from
the fixed pivot D : '); deltaa = input('enter the deviation angle
of the p.v. of the c.g. of AB from the p.v. of pivot B : '); deltab
= input('enter the deviation angle of the p.v. of the c.g. of BC
from the p.v. of pivot C(wrt B) : '); deltac = input('enter the
deviation angle of the p.v. of the c.g. of CD from the p.v. of
pivot C(wrt D) : '); thetaa = input('enter the input angle (angle
between AB and AD) in degrees : '); omegaa = input('enter the
angular velocity of link AB : '); alphaa = input('enter the angular
acceleration of the link AB : '); Tl = input('enter the load torque
: ');
%CONVERTING DEGREES TO RADIANS AND CHECKING FOR FEASIBILITY
thetaa = 3.1415926*thetaa/180; K = ((a*a) - (b*b) + (c*c) +
(d*d))/2; P = K - (a*(d-c)*cos(thetaa)) - (c*d) ; Q =
-2*a*c*sin(thetaa); R = K - (a*(d+c)*cos(thetaa)) - (c*d);
flag=0; if ((Q*Q - 4*P*R)
-
alphab1 = ((-1*a*alphaa*sin(thetac1 - thetaa)) +
(a*omegaa*omegaa*cos(thetac1 - thetaa)) +
(b*omegab1*omegab1*cos(thetac1 - thetab1)) -
(c*omegac1*omegac1))/(b*sin(thetac1 - thetab1)); alphab2 =
((-1*a*alphaa*sin(thetac2 - thetaa)) + (a*omegaa*omegaa*cos(thetac2
- thetaa)) + (b*omegab2*omegab2*cos(thetac2 - thetab2)) -
(c*omegac2*omegac2))/(b*sin(thetac2 - thetab2)); alphac1 =
((-1*a*alphaa*sin(thetab1 - thetaa)) + (a*omegaa*omegaa*cos(thetab1
- thetaa)) + (b*omegab1*omegab1) - (c*omegac1*omegac1*cos(thetac1 -
thetab1)))/(c*sin(thetac1 - thetab1)); alphac2 =
((-1*a*alphaa*sin(thetab2 - thetaa)) + (a*omegaa*omegaa*cos(thetab2
- thetaa)) + (b*omegab2*omegab2) - (c*omegac2*omegac2*cos(thetac2 -
thetab2)))/(c*sin(thetac2 - thetab2));
%CALCULATION OF THE ELEMENTS OF THE 'b' MATRIX b1 =
-1*ma*rga*(alphaa*cos(thetaa + deltaa - (3.1415926/2)) +
omegaa*omegaa*cos(thetaa + deltaa)); b2 = ma*9.81 -
ma*rga*(alphaa*sin(thetaa + deltaa - (3.1415926/2)) +
omegaa*omegaa*sin(thetaa + deltaa)); b3 = ma*ka*ka*alphaa; b4 =
-1*mb*rgb*(alphab1*cos(thetab1 + deltab - (3.1415926/2)) +
omegab1*omegab1*cos(thetab1 + deltab)); b5 = mb*9.81 -
mb*rgb*(alphab1*sin(thetab1 + deltab - (3.1415926/2)) +
omegab1*omegab1*sin(thetab1 + deltab)); b6 = mb*kb*kb*alphab1; b7 =
-1*mc*rgc*(alphac1*cos(thetac1 + deltac - (3.1415926/2)) +
omegac1*omegac1*cos(thetac1 + deltac)); b8 = mc*9.81 -
mc*rgc*(alphac1*sin(thetac1 + deltac - (3.1415926/2)) +
omegac1*omegac1*sin(thetac1 + deltac)); b9 = mc*kc*kc*alphac1 -
Tl;
%CALCULATIONS OF THE ELEMENTS OF THE 'A' MATRIX A31 =
rga*sin(thetaa + deltaa); A32 = -1*rga*cos(thetaa + deltaa); A33 =
a*sin(thetaa) - rga*cos(thetaa + deltaa); A34 = rga*cos(thetaa +
deltaa) - a*cos(thetaa); A39 = 1;
A63 = rgb*sin(thetab1 + deltab); A64 = -1*rga*cos(thetab1 +
deltab); A65 = b*sin(thetab1) - rgb*cos(thetab1 + deltab); A66 =
rgb*cos(thetab1 + deltab) - b*cos(thetab1);
A95 = rgc*cos(thetac1 + deltac) - c*sin(thetac1); A96 =
c*cos(thetac1) - rgc*cos(thetac1 + deltac); A97 = rgc*sin(thetac1 +
deltac); A98 = -1*rgc*cos(thetac1 + deltac);
B = [b1 b2 b3 b4 b5 b6 b7 b8 b9]; A = [1 0 -1 0 0 0 0 0 0;0 1 0
-1 0 0 0 0 0;A31 A32 A33 A34 0 0 0 0 1;0 0 1 0 -1 0 0 0 0;0 0 0 1 0
-1 0 0 0;0 0 A63 A64 A65 A66 0 0 0;0 0 0 0 1 0 1 0 0;0 0 0 0 0 1 0
1 0;0 0 0 0 A95 A96 A97 A98 0];
%CALCULATION OF THE FIRST SOLUTION X = (inv(A))*B'; theta112 =
(atan(X(2,1)/X(1,1)))*180/3.1415926; if(X(1,1)
- theta134 = (atan(X(6,1)/X(5,1)))*180/3.1415926; if(X(5,1)
-
disp('Set I : '); disp('X = [F12x F12y F23x F23y F34x F34y F14x
F14y Ts] ');disp(X); disp('F12 = ');disp(sqrt(X(1,1)^2 +
X(2,1)^2)); disp('theta_F12 = ');disp(theta112); disp('F23 =
');disp(sqrt(X(3,1)^2 + X(4,1)^2)); disp('theta_F23 =
');disp(theta123); disp('F34 = ');disp(sqrt(X(5,1)^2 + X(6,1)^2));
disp('theta_F34 = ');disp(theta134); disp('F14 =
');disp(sqrt(X(7,1)^2 + X(8,1)^2)); disp('theta_F14 =
');disp(theta114);
disp('Set II : '); disp('Y = [F12x F12y F23x F23y F34x F34y F14x
F14y Ts] ');disp(Y); disp('F12 = ');disp(sqrt(Y(1,1)^2 +
Y(2,1)^2)); disp('theta_F12 = ');disp(theta212); disp('F12 =
');disp(sqrt(Y(3,1)^2 + Y(4,1)^2)); disp('theta_F23 =
');disp(theta223); disp('F12 = ');disp(sqrt(Y(5,1)^2 + Y(6,1)^2));
disp('theta_F34 = ');disp(theta234); disp('F12 =
');disp(sqrt(Y(7,1)^2 + Y(8,1)^2)); disp('theta_F14 =
');disp(theta214);
flag=flag+2; end %END OF CODE
Dynamic analysis of Slider Crank Mechanism
-
Example1:
Solution:
l=450 mm
r=150 m
m
A
B
B
AG
l=300 mm
Inertia forces due to reciprocating masses:
-
Torque to consider the correction couple:
Torque due to mass at A:
Total torque on the crankshaft:
(answer)
Example 2:
-
Solution:
Inertia forces due to reciprocating mass:
l=2m
r=0.4 m
A
B
O
Torque to consider the correction couple:
-
Torque due to weight of mass at A:
Torque due to weight of mass at B:
Total inertia torque on the crankshaft:
Graphical method:
Inertia torque
-
QC
O
N
D
Ix
Y
Z
G
E
dg
K
L
P
2
0.4
QC
O
N
D
E
dg
K
L
-
Summery
Exercise Problems
1.
-
CAM DYNAMICS Mechanism provides a non-linear I/O relationship.
Different mechanism like single or multi-
degrees of freedom, intermittent motion mechanisms and linkages
etc. have different I/O
relationship. When we can not obtain a certain functions from
the well known mechanisms,
we use a cam mechanism. It is a one degree of freedom mechanism
of two moving links. One
is cam and the other is follower.
There are limitations of its use. After some critical
speed the nett acceleration of the follower system may
be in a direction to separate it from the cam surface. So
the follower does not follow the surface profile any
more. We have to be able to calculate this critical
speed and must not operate the mechanism beyond it.
Critical speed depends on the profile of the cam, the stiffness
and pretension of any restoring
spring if exist at all or the mass of the follower. So, a
differential analysis requires for each
widely used cam profile. One example will be done here
concerning an eccentric cam. An
eccentric cam has a circular profile, but rotates about an axis
which is displaced from the cam
center by e amount, called the "eccentricity".
Follower displacement becomes;
coseey =
where t = , cam is rotating with constant angular velocity, .
taking first and second time derivative of follower displacement
equation we will get velocity
and acceleration, respectively;
mass
xSliding cam
Cam profileFollower
y=f(x)
e
k
y
m
y
m
NA NB
Fc Fs=k(y+d)
mg
-
tey sin=
And tey cos2=
There will be inertia forces acting onto the follower
proportional to this acceleration.
Differential motion equation for the follower is;
= ymF
From the free body diagram of the follower, nett force in y
direction becomes;
)( +== ykFFFF csc
Where, cF is contact force
is spring pre-compression
Substituting, y ,
y and F into differential equation of motion yields;
)(cos)( 2 ++= ektkmeFc
0=cF is the critical condition. It must always have positive
value. When 0=cF , contact is
lost and hence cam and follower are no longer touching each
other. It means that follower is
no more following the profile of the cam. It is free and
floating in the air.
Example An uniform steel bar shown in the figure is used as an
oscillating cam follower and
its mass moment of inertia is CGI as 0.65 kg.m. The cam follower
is driven by an eccentric
cam to give a rise of 4 cm. Assuming that cam system is working
on the horizontal plane and
there is no friction between the cam and follower.
k=2kN/m
2 cm 25 cm 50 cm 25 cm
5 cm
y
xO
a) Draw the freebody diagram of the follower, showing all the
forces,
-
OCG
zy,y,y
l/4 l/4l/4l/4
. ..
Fs=kz Fc
manFoy
Fox
b) Drive the cam contact force equation,
teyandteyteey cos,sin,cos 2...===
Tangential acceleration at cam contact point is equal to the ..y
, then
ltetelyat
cos2cos2
*2
2..
===
Equation of motion of follower is;
= oo IM
= 4**
2* lzklFM co
Substituting angular acceleration, mass moment of inertia and
moment equation into EQM,
+=
ltewlmlzklFc
cos***2*48
47*4
**2
*222
In this equation we need a relationship between y and z. This
comes from similar triangles.
So,
-
2cos
224 teezyzy
l
z
l
=== ,
( )teelk
ltewl
lmFc
coscos***2*24
47*222
+
+=
c) Sketch a displacement diagram showing the follower motion for
the entire 360 of the
cam rotation without computing the numerical values, superimpose
graph of cam contact
force onto the same axis. Show where jump is most likely to
begin,
/2 3/2 2
Jump is most likely occurs here
y Fc
d) Calculate the jump speed,
When 0== cFandt
lke
lewl
lm **2**2*
2447*0
222
+
+=
+= 22 37
24*wlm
lk
e) List the things that can be done to increase the critical
speed of this system.
In order to increase the speed;
k can be increased. Harder spring can be used.
m can be reduced. Smaller mass means smaller dimensions.
-
Example The cam-and-follower
system shown in figure has 2=k
kN/m, 1=m kg,
tcosy 1515 = mm, and 50=
rad/sec. The retaining spring is
assembled with a preload of 5 N.
a) Draw the freebody diagram of the follower.
y
FC Fs=k(y+ )
NA NB
mg
b)What is the acceleration of the follower, when 1=t sec.
222 18636223618615050151515
1515
sec/m.sec/mm.)*cos(**tcos**ytsin**ytcosy
====
=
=
DD
D
c) Drive conctact force equation between the cam and
follower.
( )C
C
Cy
y
Ftcosk)tcos**(m
F)y(kym)y(kymF)y(kF
ymF
=
+
+
=+++=
++=
=
10001515
100015 2
DDDD
DD
d) Compute the maximum and minimum values of the contact
force.
( )
tsin)mk(*.tsin**.*ktsin*.*m)t(d
tcosk)tcos**(md
dtdFC
22
2
0150015001500
10001515
100015
0
+==
+
+
==
210001500 2
,,nwherenttsintsin)mk(*.
===
+=
A B
yk
-
CF is maximum when 20 == tort and CF is minimum when =t .So,
N.)cos(*.*cos**.(*FN.)cos(.*)cos**.(*F
minC
maxC
52751015020005001501
54250101502000050015012
2
=++=
=++=
e) If the follower is found to jump off the cam, compute the
angle t corresponding to the
very beginning of jump.
it is seen from previous answer minCF >0,so there is no
jump.
Example A cam of linear displacement
profile is moving leftward with a constant
velocity to actuate the spring-mass system
shown.
a) Draw the freebody diagrams (mass and
spring)
b) Drive differential equation of motion of the follower.
c) Determine the natural frequency of the system in rad/sec
d) Determine the amplitude of the rise motion
a) Draw the freebody diagrams
b) Drive differential equation of motion of the body
= xmFx DD
m x
F=k(x-y)
x
y
F=k(x-y)
F=k(x-y)
-
= )yx(kFx Then equation of motion becomes;
kykxxm =+DD where taby =
c) Determine the natural frequency of the system in rad/sec
Solution of this equation of motion is;
kykxxm =+DD ymkx
mkx =+ DD
.sec/rad.mk
n 724412000
===
d) Determine the amplitude of the motion
Complementary part of this equation of motion is;
tsinBtcosAx nnc +=
Particular part of this equation of motion is;
tabx np =
Overall solution is
tabtsinBtcosAx nnnc ++=
22 BAX amp +=
A and B is to be found from initial conditions.
0
0000
00
=
++=++=
===
AabsinBcosAt
abtsinBtcosAx
mxx,t
nnnnnn
o
abB
abcosBsinA
abtcosBtsinAx
x,t
nnnnnnnnnn
=
++=++=
==
000
00
D
D
-
m.abBAX amp 6600
22
22=+
=+=
Example The mass m is driven up and down by the eccentric
cam as shown in figure. The eccentricity is 3 cm. Assume no
friction
a) Derive the equation for the contact force.
b) Find the cam velocity w corresponding to the beginning of
the jump.
tcoseey =
tsiney =D
tcosey 2=DD
FBD of the follower;
ymF DD=
mgFF c =
mgymFymmgF cc == DDDD
mgtcosmeFc += 2 (1)
Jump most probably occurs when 0=cF
To obtain where cF is minimum;
tsinme)t(d
dFc
20 ==
,.......,,,,n,*ntwhere,tsin 432100 ===
obviously when =t , cF is minimum. So, subsituting this into
(1);
sec/rad...
egmgcosme 08318
0308190 2 ===+=
my
Fc
my
e
-
Q-5 (20%) The cam-and-follower system shown in figure has
.sec/radandmme,tcoseey,kgm,m/kNk
501522==
===
Mechanism is working on vertical plane. Assume that friction of
the rollers at A
and Bs are negligible small. a) Draw the freebody diagram of the
follower.
y
FC
Fs=ky
NA
NB
mg
b) What is the acceleration of the follower, when 1=t sec.
222 18636223618615050151515
1515
sec/m.sec/mm.)*cos(**tcos**ytsin**ytcosy
====
=
=
DD
D
c) Drive contact force equation between the cam and
follower.
( )C
C
Cy
y
Fmgtcosk)tcos**(m
FmgkyymmgkyymFmgkyF
ymF
=+
+
=++=
+=
=
10001515
100015 2
DDDD
DD
d) Compute the maximum and minimum values of the contact force.
( )
tsin)mk(*.tsin**.*ktsin*.*m)t(d
mgtcosk)tcos**(md
dtdFC
22
2
0150015001500
10001515
100015
0
=+=
+
+
==
210001500 2
,,nwherenttsintsin)mk(*.
===
=
CF is maximum when 20 == tort and CF is minimum when =t .So,
N..*)cos(*.*cos**.(*FN..*)cos(.*)cos**.(*F
minC
maxC
124281921015020005001501
125781920101502000050015012
2
=++=
=++=
e) If the follower is found to jump off the cam, compute the
angle t corresponding to the very beginning of jump. it is seen
from previous answer minCF >0,so there is no jump.
A
B
y
k