Embed Size (px)
Citation preview

MAT 307-NÜMERIK ANALIZDERS NOTLARI
Dr. Aysun Tezel Özturan
8 Ocak 2020

Içindekiler
Tesekkür iii
Ön Söz v
1 Nümerik Analize Genel Bakıs 11.1 Makine Sayıları ve Hatalar (Machine Numbers and Errors) . . . . . . 4
2 Lineer Denklem Sistemleri (Sytems of Linear Equations) 112.1 Matrisler ve Vektörler (Matrices and Vectors) . . . . . . . . . . . . . . 112.2 Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods
for Systems of Linear Equations) . . . . . . . . . . . . . . . . . . . . 262.2.1 Gauss Eleme Yöntemi (Gauss Elimination Method) . . . . . . 312.2.2 Gauss-Jordan Eleme Yöntemi (Gauss-Jordan Elimination Met-
hod ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 442.2.3 LU Çarpanlarına Ayırma Yöntemi (LU Decomposition Method) 502.2.4 Lineer Denklem Sistemleri için Iteratif Yöntemler (Iterative Met-
hods for Linear Systems of Equations) . . . . . . . . . . . . . 632.2.5 Hata, Rezidü, Norm ve Kosul Sayısı (Error, Residu, Norm and
Condition Number) . . . . . . . . . . . . . . . . . . . . . . . . 772.2.6 Alıstırmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3 Sayısal Türev (Numerical Differentiation) 91
4 Sayısal Integral (Numerical Integration) 1074.0.1 Dikdörtgen Kuralı (Rectangle Rule) . . . . . . . . . . . . . . . 1104.0.2 Orta Nokta Kuralı (Midpoint Rule) . . . . . . . . . . . . . . . . 1154.0.3 Yamuk Kuralı (Trapezoid Rule) . . . . . . . . . . . . . . . . . 1214.0.4 Simpson Kuralları (Simpson’s Rules) . . . . . . . . . . . . . . 1254.0.5 Gauss Kareleme Yöntemi (Gauss Quadrature) . . . . . . . . . 1314.0.6 Alıstırmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
5 Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions forPDE) 139
5.0.1 Eliptik Denklemler . . . . . . . . . . . . . . . . . . . . . . . . 1475.0.2 Parabolik Denklemler . . . . . . . . . . . . . . . . . . . . . . 1545.0.3 Hiperbolik Denklemler . . . . . . . . . . . . . . . . . . . . . . 164
v

Içindekiler
5.0.4 Alıstırmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
vi

1 Nümerik Analize Genel Bakıs
Nümerik analiz, analitik çözümün elde edilemedigi veya elde edilmesinin çokzor oldugu problemlerin yaklasık çözümünü bulmakta kullanılan yöntemleriiçeren bir alandır. Nümerik analiz bu sayısal yöntemlerin teorisi ve yöntem-lerin bilgisayar programlaması ile ilgilenmektedir.
Sayısal yöntemlerle, örnegin analitik yollardan çözülmesi zor olan denklemve denklem sistemleri çözülebilir. Örnegin, derecesi 5 veya daha büyük poli-nomların kökleri için bir formül yoktur, x5 − 3x− 5 = 0 gibi. Hatta daha genelanlamda f(x) = 0 formundaki tüm denklemlerin çözümleri için yöntemlergelistirmek nümerik analiz alanının bir konusudur.
Nümerik Analizde;
• Genel anlamda bir problem çözülemiyorsa probleme çok yakın ve prob-lemden daha kolay çözülebilen bir problem ile degistirilebilir. Örnegin,kök bulma ve sayısal integral yöntemlerinde bu yapılmaktadır.
• Hatanın büyüklügü ve analitik formu önemli bir konudur. Probleminkendisi degil yaklasık problem ele alındıgında hesaplamalardan dogacakhata kaçınılmazdır. Hatanın formunu anlamak sayısal yöntemin yakın-saklık davranısı ile ilgili tahmin etmeyi saglar.
• Kararlılık, problemlerdeki parametrelerin veya verilerdeki küçük degi-simlere karsı problemin göstermis oldugu hassasiyet olarak adlandırılırve nümerik analizde önemli olan konulardan birisidir. Örnegin,
p(x) = (x− 1)(x− 2)(x− 3)(x− 4)(x− 5)(x− 6)(x− 7)
= x7 − 28x6 + 322x5 − 1960x4 + 6769x3 − 13312x2 + 13068x− 5040
polinomunun köklerinden biri 5 ve 6 dır. x6 teriminin önündeki katsayı−28.002 ile degistirildiginde kökler 5.459±0.540i olarak bulunur, köklerdeçok büyük bir degisim olmustur. Bu tür polinomlara kök bulma prob-lemlerine göre kararlı olmayan veya iyi tanımlı olmayan polinomlardadenir. Orijinal problemin kararlı ve iyi tanımlı olup olmadıgı da incelen-melidir.
• Nümerik analiz, sayısal yöntemlerin çözüme yakınsayıp yakınsamadıgı,hangi kosullar saglanırsa yakınsamanın gerçeklesecegi ile de ilgilenir.Bazı sayısal yöntemler digerlerine göre daha hızlı yakınsarlar. Ancak buhızlı yakınsama daha karmasık bir programlamayı gerektirebilir.
1

Nümerik Analize Genel Bakıs
• Bütün sayısal yöntemler için baslangıç degeri önemlidir. Bazı yöntem-lerde tek bir baslangıç degeri yeterli olurken bazı yöntemlerde birdenfazla baslangıç noktası vermek gerekebilir.
• Bazı sayısal yöntemler digerlerine göre daha dogru sonuç bulurlar. Sa-yısal yöntemlerin çalısma verimleri, adım büyüklügü küçültülerek veyaverilen aralıktaki uygulama sayısı arttırılarak gelistirilebilir. Ancak ma-liyet ve programlama kolaylıgı yuvarlama hataları gibi etkenler gözö-nünde bulundurularak adım büyüklügünün veya uygulama sayısınınayarlanması gerekir.
• Algoritmaların etkisinin ölçümü ve algoritmaların maliyeti de nümerikanalizdeki önemli bir konulardan biridir. Örnegin, n denklem içerenAx = b lineer denklem sistemini çözerken n3 miktarında aritmetik islemkullanılmaktadır. Bu durumda n bilinmeyen sayısı arttıkça artimetik is-lem sayısı kübü seklinde artmaktadır.
• Nümerik analizde, bilgisayar aritmetigini kullanan sonlu ifadelerin et-kileri, örnegin yuvarlama hatasını içeren büyük problemler önemli birkonudur.
• Nümerik analizin, lineer cebir, reel analiz ve fonksiyonel analiz alanla-rında genis kullanımı vardır.
Sayısal Yöntemlerin Sınıflandırılması:
• Makine Sayıları ve Hatalar
• Lineer Olmayan Denklem Sistemlerinin Çözümleri
• Lineer Denklem Sistemlerinin Çözümleri
• Interpolasyon ve Egri Uydurma
• Optimizasyon
• Sayısal Türev
• Sayısal Integral
• Adi Diferansiyel Denklemlerin Sayısal Çözümleri
• Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri
Denklem sistemleri ile tüm mühendislik disiplinlerinin matematik modelle-rinde karsılasılmaktadır. Lineer olmayan denklem sistemlerinde birden fazlalineer olmayan denklem aynı anda çözülmeye çalısılır. Lineer denklem sis-temlerinde birden fazla lineer denklem aynı anda çözülmeye çalısılır.
f(x) fonksiyonunun degerleri x0, x1, · · ·xn noktalarında verilsin. Interpolas-yon, veri noktaları arasında kalan ara noktalar için fonksiyonun degerinin
2

Nümerik Analize Genel Bakıs
belirlenmesi islemidir. Yani, interpolasyonda veri noktalarından geçen bir eg-rinin bulunması ve bu egriden yararlanarak ara degerlerdeki fonksiyon de-gerlerinin yaklasık olarak belirlenmesi hedeflenir. Egri Uydurmada ise verilennoktalardan en küçük (minimum) hata ile geçen egri bulunmaya çalısılır.Optimizasyon konusunda bir fonksiyonun en küçük veya en büyük degeribulunmaya çalısılır. Fonksiyon tek degiskenli veya çok degiskenli olabilir.Türev bir fonksiyonun degisim hızını verir. Geometrik olarak bir noktadakitürev grafige o noktada çizilen teget dogrusunun egimidir. Sayısal türevdeyapılan ise türevi alınması çok zor olan fonksiyonların türevlerine, türevi is-tenilen noktalarda yaklasık degerler bulmak veya sadece belirli noktalardadegeri bilinen fonksiyonların o noktalardaki türevlerine yaklasık degerler bul-mak hedeflenir.Integralin fiziksel anlamı bir egrinin altında kalan alanın belirlenmesidir. Kul-lanım alanlarından biri, mühendislik uygulamalarında düzensiz sekillendiril-mis cisimlerin kütle merkezlerinin bulunmasıdır. Sayısal integralde, integralianalitik olarak bulunamayan fonksiyonların (antitürev fonksiyonları var ol-mayan fonksiyonların) integrallerinin yaklasık olarak bulunması veya sadecebelirli noktalarda degeri verilen bir fonksiyonun integralinin yaklasık olarakbulunması hedeflenir. Örnegin
∫ 10 e
xdx veya∫ π
0 cos(x)dx integrallerini hesap-layabilirken
∫ 10 e
x2dx veya∫ π
0 cos(x2)dx integralleri analitik olarak bulunamaz.Çünkü antitürev fonskiyonları yoktur. Yani türevi ex
2ve cos(x2) olan analitik
bir fonksiyon bulunamaz. Bu nedenle bu tarz fonksiyonlar için integral dege-rinin yaklasık olarak bulunması sayısal integral yöntemlerinin konusudur.Difeansiyel denklemler fiziksel sistemin konumuna ve/veya zamana baglı de-gisimlerini ifade eden denklemlerdir. Diferansiyel denklem analitik olarak çö-züldügünde sistemi konuma ve/veya zamana göre tanımlayan bir matema-tiksel fonksiyon bulunmus olur. Diferansiyel denklemler derecelerine görede sınıflandırılmaktadır. Eger sadece birinci dereceden türevler varsa birincidereceden diferansiyel denklem olur. Yüksek dereceli denklemler birinci de-receden denklemlere indirgenerek çözüm yapılır. Diferansiyel denklemlerinsayısal çözümlerinde ise çözüm fonksionu analitik olarak bulunmaz, çözümfonksiyonunun belirli noktalarda aldıgı yaklasık degerlerin bulunması hedef-lenir.Diferansiyel denklem tek degiskene baglı ise Adi Diferansiyel Denklem (örne-gin, y′+xy = 0, burada y, x bagımsız degiskenine baglı bir fonksiyon, yani y(x)formunda, y′ ise y fonksiyonunun birinci mertebden türevidir), birden fazlabagımsız degiskene baglı ise Kısmi Diferansiyel Denklem (Partial differentialequation) denir. Ikinci meretbeden Kısmi türevli diferansiyel denklemler iseüç ana grupta incelenir:
(i) Elliptik denklemler/Elliptic pde: Laplace denklemi (Laplace equation):Uygulamalarından biri levha boyunca ısı dagılımıdır. Ayrıca sıvı akısı,
3

Nümerik Analize Genel Bakıs
gravitasyonel potansiyel problemleri, elektromanyetizma gibi konulardada kullanılır.
(ii) Parabolik Denklemler/Parabolic pde: Isı denklemi (Heat equation) gibi:Çubuk boyunca zamana baglı ısı akısını modeller.
(iii) Hiperbolik Denklemler/Hyperbolic pde: Dalga denklemi (Wave equation)gibi: Titresimlerin ve dalgaların yayılımını modeller. Salınım yapan yay,akustik, membranın titresimi gibi konularda kullanılır.
Bu denklemlerin sayısal çözümlerini bulmak için temelde iki grup yöntemvardır:
(1) Sonlu Farklar Yöntemi (Finite Difference Method)
(2) Sonlu Elemanlar Yöntemi (Finite Element Method)
Bu derste yukarıdaki konularından: Lineer Denklem sistemlerinin Çözümyöntemleri: Direk Yöntemler (Gauss eleme, Gauss-Jordan eleme, LU ayrı-sımı), Iteratif Yöntemler (Jacobi Iterasyonu, Gauss-Seidel Iterasyonu), Sayı-sal Türev (Ileri, Geri, Merkezi fark formülleri), Sayısal Integral (DikdörtgenKuralı, Yamuk Kuralı, Simpson’s 1/3 Yöntemi, Richardson Ekstrapolasyonu)ve Kısmi Türevli Diferansiyel Denklemler için Sonlu Farklar Yöntemi (Eliptik,parabolik, hiperbolik pde için sonlu farklar formülleri) konuları islenecektir.
1.1 Makine Sayıları ve Hatalar (Machine Numbers andErrors)
Bilgisayarda Sayıların Gösterimi (Machine Numbers)
Matematikte ondalık sistem (10 tabanı) kullanılır. Ondalık sistemde 0, 1, · · · , 9rakamları kullanılır. Örnegin,
314.528 = 3x102 + 1x101 + 4x100 + 5x10−1 + 2x10−2 + 8x10−3
olarak yazılır. Ikili sistemde ise sadece 0 ve 1 rakamları kullanılır. Örnegin,
10010.001 = 1x24 + 0x23 + 0x22 + 1x21 + 0x20 + 0x2−1 + 0x22−2 + 1x2−3 = 18.125
Yani,(10010.001)2 = (18.125)10
olur. Onluk sistemde verilen bir sayıyı ikilik sisteme dönüstürmek için isesayının ve bölümlerin 2 ile bölümünden kalanlar terste alınır. Örnegin,
(50)10 = (110010)2
4

Makine Sayıları ve Hatalar (Machine Numbers and Errors)
olur.
Bilimsel gösterimde sayılar, virgülün solunda sıfırdan farklı basamak kalacaksekilde 10’un kuvvetlerinin çarpımı seklinde yazılır. Örnegin,
5647 = 5.647x103, 0.0003456 = 3.456x10−4
seklinde yazılır. Bu formatta 10’un kuvveti degistikçe nokta, kuvvetin degismeyönüne göre kaydırılır. Bu nedenle bu gösterime kayan nokta gösterimi (flo-ating point) denir. Kayan noktalı sayılar, mantis, taban ve üst olmak üzereüç kısımdan olusur. Örnegin,
13 = 13.0x100 = 1.3x101 = 0.13x102
veya ikili sistemde kayan nokta gösterimi
1310 = 11012x20 = 110.12x21 = 1.1012x23 = 0.11012x24
olur. Bilgisayarda sayılar ikili kayan nokta gösteriminde depolanır. Sayınınmantis ve üst kısımları ayrı ayrı depolanır.
Sayının ±0.b1b2 · · · bdxβN kayan nokta gösteriminde, anlamlı basamak sayısıiçin b1 6= 0, bd 6= 0 olmalıdır. Örnegin, 0.1203x102 sayısında 4 anlamlı basamak,0.1230x10−2 sayısında 3 anlamlı basamak, 0.1000x103 sayısında 1 anlamlı ba-samak vardır.
Yuvarlama ve Kesip Atma:
c = ±0.b1b2 · · · bkbk+1 · · · bdx10N sayısında k basamak dikkate alınarak yeni birsayı olusturulabilir. y = ±0.b1b2 · · · bkx10N bu yönteme kesip atma (chopping)denir. Yuvarlamada ise k basamaktaki sayı 5’e esit veya büyük ise 1 fazlasıalınır. Yani bk+1 ≥ 5 ise bk + 1 olur. Eger bk+1 < 5 ise bk olarak kalır. Buisleme yuvarlama (rounding) denir. Örnegin, π = 0.314159265 · · ·x101 sayısıiçin 5- basamaktan kesip atma yapılırsa 0.31415x101 = 3.1415 elde edilir. 5-basamaktan yuvarlama yapılırsa 0.31416x101 = 3.1416 elde edilir.
Tanım 1.1.1 a: tam deger, a: yaklasık deger olsun. Bu durumda
Em = |a− a| mutlak hata
Er =|a− a||a|
, a 6= 0, rölatif hata
Ep =|a− a||a|
= Er ∗ 100 rölatif hata yüzdesi
olarak tanımlıdır.
5

Nümerik Analize Genel Bakıs
Örnek 1.1.1x = 3.141592, x = 3.14
olsun. Bu durumda
Em = |x− x| = |3.141592− 3.14| = 0.001592
Er =|x− x||x|
=0.001592
3.141592= 0.000507
Ep = Er ∗ 100 = %0.0507
olarak bulunur.
Eger gerçek deger çok büyük veya çok küçükse, rölatif hata yaklasımın dog-rulugunu göstermede mutlak hatadan daha iyi bir belirteçtir.
Örnek 1.1.2 p ≈ p, burada p = 150 olsun ve yaklasım en çok 10−3 rölatif hataile olan bir yaklasım olsun. p yaklasık degerinin içinde bulunacagı en büyükaralıgı bulunuz.
|150− p||150|
< 10−3
alınarak|150− p| < 150 ∗ 10−3
olur.−150 ∗ 10−3 < 150− p < 150 ∗ 10−3
149.85 < p < 150.15
olur. Yani p ∈ (149.85, 150.15) aralıgında olur.
Tanım 1.1.2 d sayısı|a− a||a|
<101−d
2
Yani,|a− a||a|
< 5x10−d
esitsizligini saglayan en büyük pozitif tamsayı olsun. Bu durumda a sayısıgerçek deger a’ya d anlamlı basamakla yaklasıyor denir.
6

Makine Sayıları ve Hatalar (Machine Numbers and Errors)
Örnek 1.1.3y = 1000000, y = 999996
olsun. Bu durumda
|y − y||y|
= 0.000004 < 0.5x10−5 < 5x10−6
olur. y sayısı y sayısına 6 anlamlı basamakla yaklasım yapmaktadır. y sayısıiyi bir yaklasımdır.
Eger iki sayı neredeyse birbirine esitse çıkarma isleminde anlamlı basamakkaybı (loss of significance) meydana gelir.
Sayısal Yöntemlerde Hatalar (Errors in Numerical Methods)
Problemin sayısal yöntem ve analitik yöntemle çözülmesi durumunda ikisiarasında ortaya çıkan fark, hata olarak tanımnlanır. Karsılasılan hatalar, ge-nel olarak yuvarlama, kesme ve bu iki hatanın toplamından olusan toplamhata seklindedir.
Yuvarlama Hataları (Round-off Errors)
Sayılar bilgisayarda sonlu sayıda bit ile gösterildiginden yuvarlama hatalarıbilgisayarların bu sayıları ifade etmek için sınırlı sayıda basamak kullan-masından kaynaklanır. Reel sayıların mantis kısmı sınırlandırıldıgında, bellibir sınır aldıgımızda, gerçek degerler bazen tam olatrak bilgisayarda sakla-namaz. Bu durum yuvarlama hatası olusturur. Örnegn, π ≈ 3.1415 · · · , e ≈2.711828 · · · ,
√7 gibi sayılar sabit (sonlu) sayıda anlamlı basamakla yazılamaz.
Aynı zamanda bilgisayarlar 2 tabanına göre çalıstıkları için 10 tabanına göretamsayıları hassas olarak ifade edemezler. Sayıların dogru olarak ifade edil-mesi için gereken hane sayısından daha az hane sayısında kesilen ve bilgi-sayar tarafından da daha fazla terim alınamadıgı için atılan sayılarla ilgilihesaplamalarda ortaya çıkan hata yuvarlama hatası olarak tanımlanır.
Kesme Hataları (Truncation Errors)
Hesaplamada çok fazla veya sonsuz sayıda terim alınması durumunda mey-dana gelir. Örnegin sonsuz uzunluktaki bir seri, belirli bir kısımdan itibarenkesilerek kullanılır ve kalan terimleri atılır. Bu durumda kesme hataları or-taya çıkar.
Örnek 1.1.4 cosx fonksiyonunun Taylor serisi
cosx = 1− x2
2!+x4
4!− x6
6!+x8
8!− x10
10!+ · · ·
7

Nümerik Analize Genel Bakıs
Verilen herhangi bir x noktasında kosinüs degerinin hesaplanmasında sonsuzsayıda terim kullanılamayacagından ancak belirli terimle islem yapılır.
Örnegin, cos π5 tam degeri,
cosπ
5= 0.809016994374947
Seri açılımda tek terim için yaklasık deger
cosπ
5= 1
Kesme hatası gerçek deger ile yaklasık deger arasındaki farka esittir.
Ek = −0.190983005625053
Iki terim için
cosπ
5= 1−
(π5 )2
2!= 0.802607911978213
Kesme hatasıEk = 0.006409082396735
olur. Iki terim kullanıldıgında hata azalmıstır.
Hata Birikimi (Propagation of Error)
p, q degerleri, Ep ve Eq hata terimleri olmak üzere, p ve q sayılarına yaklasımdegerler olsun. Yani
p = p+ Ep
q = q + Eq
Bu durumda
• p+ q = p+ q + Ep + Eq olur. Yani, toplamdaki hata, hataların toplamıdır.
• pq = (p + Ep)(q + Eq) = pq + pEq + qEp + EpEq, p 6= 0, q 6= 0 olmak üzereçarpımdaki rölatif hata,
Er =pq − pqpq
=pEq + qEp + EpEq
pq=Epp
+Eqq
olarak elde edilir. Burada
p
p≈ 1,
q
q≈ 1,
EpEqpq
≈ 0
esitlikleri alınır. Yani, çarpmadaki rölatif hata, rölatif hataların toplamı-dır.
8
Makine Sayıları ve Hatalar (Machine Numbers and Errors)
Polinomlar belirli bir x degeri için hesaplanmadan önce içiçe çarpım teknigiile ifade edilirse, aritmetik hesaplamaların sayısı minimum (en az) hale gelir.Bu sekilde rölatif hata indirgenmis olur. Örnegin,
p(x) = x3 − 6.1x2 + 3.2x+ 1.5 = ((x− 6.1)x+ 3.2)x+ 1.5
Tanım 1.1.3 Bir sayısal yöntemde baslangıçta yapılan küçük degisiklikler so-nuçta da küçük degisiklikler olusturuyorsa bu yönteme kararlıdır (stable) denir,aksi durumda kararsız (unstable) denir. Bazı algoritmalar baslangıç verisininbelirli türden seçimi için kararlıdır. Bu algoritmalara kosullu kararlı denir.
Yakınsama Kontrolü (Convergence Criteria )
Yuvarlama ve kesme hataları toplamı toplam sayısal hatayı olusturur. Genelolarak yuvarlama hatalarını en aza indirmenin yolu anlamlı basamak sayısınıarttırmaktır, ayrıca adım büyüklügü azaltılarakta kesme hataları azaltılabi-lir. Ancak adım büyüklügünün azaltılması hesap sayısının artmasına nedenolacagından kesme hataları azalırken yuvarlama hataları artar. Çözüme ya-kınsama kontrolü, problemin türüne baglı olarak farklı biçimlerde yapılabilir.Çözüme yakınsama kontrolünde kullanılan hata türleri sunlardır:
• Gerçek mutlak hata: Eger gerçek deger, x biliniyorsa bu deger ile bu-lunan yaklasık deger, xn arasındaki farktır. x, problemin gerçek çözü-münü, xn ise n. adımda elde edilen sayısal çözümü göstersin.
|x− xn| ≤ ε
• Yaklasık mutlak hata: Ardısık yinelemelerde bulunan iki farklı degerarasındaki farkın mutlak degeridir. Yakınsama problemin basında belir-lenen bir ε degerinden küçük olmayla kontrol edilir. xn+1, (n+1). adımdaelde edilen, xn, n. adımda elde edilen yaklasık çözüm olsun. xn sayısalyöntem kullanılarak elde edilen yinelemelerdeki çözümler ise
|xn+1 − xn| ≤ ε
• Gerçek rölatif (bagıl) hata:|x− xn||x|
≤ ε
• Yaklasık rölatif (bagıl) hata:
|xn+1 − xn||xn+1|
≤ ε
9

Nümerik Analize Genel Bakıs
Eger problem f(x) fonksiyonunun kökünü bulma problemi ise yakınsamaislemi herhangi bir adımda buldugumuz x degerine karsılık gelen fobksiyondegeri ile kontrol edilebilir. Degerin baslangıçta belirlenen bir ε degerindenküçük olması gerekir. Yani, xn, n. adımda elde edilen yaklasık çözüm iseyakınsama için
|f(xn)| ≤ ε
saglanmalıdır.
Yakınsama kontrolü, x degerleri yerine f(x) fonksiyon degerleri kullanılarakyapılabilir.
Baslangıçta belirlenen maksimum tekrarlama sayısına ulasıldıgında yinele-meler durdurulabilir.
10

2 Lineer Denklem Sistemleri (Sytems ofLinear Equations)
Mühendislik, bilim, ekonomi, sosyal bilimler gibi alanların pek çok uygula-masında lineer denklem sistemleri karsımıza çıkar. Örnegin belirli bir uçuskosulunda uçaktan aerodinamik yüklerin sonlu elemanlar analizinde bin-lerce lineer denklemin birlikte çözülmesi gerekir. Genel olarak lineer denk-lem sistemleri matris formunda Ax = b biçiminde yazılır. Bu bölümde Ax = bformundaki lineer denklem sistemleri için çözüm yöntemleri islenecektir.
2.1 Matrisler ve Vektörler (Matrices and Vectors)
Tanım 2.1.1 x = (x1, x2, · · · , xn) ifadesine n bilesenli bir vektör (vector) denir.x1, x2, · · · , xn sayılarına da x vektörünün bileseni denir. n bilesenli vektörlerinoldugu kümeye n boyutlu uzay (n dimensional space) denir. Bir vektör bir noktaolarak kullanılıyorsa ona durum vektörü (position vector), eger iki nokta ara-sındaki hareketi veriyorsa buna yer degistirme vektörü (displacement vector)denir.
NOT x = (x1, x2, · · · , xn), y = (y1, y2, · · · , yn) vektörleri ve c, d reel sayıları içinasagıdaki özellikler geçerlidir.
• x = y ⇐⇒ xi = yi,∀i = 1, 2, · · · , n (Vektörlerin esitligi-equivalance ofvectors)
• x+y = (x1+y1, x2+y2, · · · , xn+yn) (Vektörlerin toplamı-the sum of vectors)
• x − y = (x1 − y1, x2 − y2, · · · , xn − yn) (Vektörlerin farkı-the difference ofvectors)
• cx = (cx1, cx2, · · · , cxn) (Skalar ile çarpım-scalar multiplication)
• cx + dy = (cx1 + dy1, cx2 + dy2, · · · , cxn + dyn) (Lineer kombinasyon-linearcombination)
• x.y = x1.y1 + x2.y2 + · · ·+ xn.yn (Nokta çarpım-dot product)
• ||x|| =√x2
1 + x22 + · · ·+ x2
n (Öklid norm-Euclid norm or length of a vector)
11

Lineer Denklem Sistemleri (Sytems of Linear Equations)
• ||y − x|| =√
(y1 − x1)2 + (y2 − x2)2 + · · ·+ (yn − xn)2 (Iki nokta arasındakiuzaklık-the distance between two points)
Örnek 2.1.1 x = (2,−3, 5,−1), y = (6, 1, 2,−4) vektörleri için
• x+ y = (8,−2, 7,−5)
• x− y = (−4,−4, 3, 3)
• 3x = (6,−9, 15,−3)
• ||x|| =√
4 + 9 + 25 + 1 =√
39
• x.y = 12− 3 + 10 + 4 = 23
• ||x− y|| =√
16 + 16 + 9 + 9 =√
50
Bazen vektörler sütun olarak da gösterilir:
x =
x1
x2...xn
= (x1, x2, · · · , xn)T
T harfi transpozesi (transpose) ya da devrigi için kullanılır.
Teorem 2.1.1 (Vector cebiri-Vector algebra)
x = (x1, x2, · · · , xn), y = (y1, y2, · · · , yn), z = (z1, z2, · · · , zn)
vektörleri, a, b, c reel sayılar olmak üzere asagıdaki özellikler geçerlidir.
• x+ y = y + x (Degisme özelligi-commutative property)
• 0 + x = x+ 0 (Sıfır vektörü etkisiz eleman)
• x− x = x+ (−x) = 0 (Ters isaretli vektör-opposite vector)
• (x+ y) + z = x+ (y + z) (Birlesme özelligi-associative property)
• (a + b)x = ax + bx (Skalar için dagılma özelligi-distributive property ofscalars)
• a(x+ y) = ax+ ay (Vektörler için dagılma distributive property of vectors)
• a(bx) = (ab)x (Skalar için birlesme özelligi-associative property of scalars)
12

Matrisler ve Vektörler (Matrices and Vectors)
Tanım 2.1.2
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...am1 am2 · · · amj · · · amn
mxn
ifadesine A matrisi (matrix A) denir. A matrisi m satır (rows), n sütundan (co-lumns) olusmaktadır. Kısa formda
A = (aij), 1 ≤ i ≤ m, 1 ≤ j ≤ n
seklinde gösterilir. i. satır, j. sütundaki elemana aij olur. A matrisinin satırları(rows) R1, R2, · · · , Rm olsun. Bu durumda A matrisi
A =
R1
R2...Rm
olarak yazılabilir. A matrisinin sütunları (columns) C1, C2, · · · , Cn olsun. Bu du-rumda A matrisi
A = (C1, C2, · · · , Cn)
olarak yazılabilir.
A = (aij), B = (bij), 1 ≤ i ≤ m, 1 ≤ j ≤ n matrisleri p, q reel sayıları için asagıdakiözellikler geçerlidir.
• A = B ⇐⇒ aij = bij , 1 ≤ i ≤ m, 1 ≤ j ≤ n (Matrislerin esitligi-equivalenceof two matrices)
• A + B = (aij + bij), 1 ≤ i ≤ m, 1 ≤ j ≤ n (Matrislerin toplamı-the sum oftwo matrices)
• A−B = (aij − bij), 1 ≤ i ≤ m, 1 ≤ j ≤ n (Matrislerin farkı-the difference ofmatrices)
• pA = (paij), 1 ≤ i ≤ m, 1 ≤ j ≤ n (Skalar ile çarpma-Scalar multiplication)
Teorem 2.1.2 (Matris Cebiri-Matrix Algebra) A = (aij), B = (bij), C = (cij), 1 ≤i ≤ m, 1 ≤ j ≤ n matrisleri p, q reel sayıları için asagıdaki özellikler geçerlidir.
• A+B = B +A (Degisme özelligi-Commutative property)
13

Lineer Denklem Sistemleri (Sytems of Linear Equations)
• 0 +A = A+ 0 (Sıfır Matris-Zero Matrix)
• (A+B) + C = A+ (B + C) (Birlesme Özelligi-Associative property)
• (p + q)A = pA + qA (Skalar için Dagılma Özelligi-Distributive property forscalars)
• p(A + B) = pA + pB (Vektörler için Dagılma Özelligi-Distributive Propertyfor Vectors)
• p(q)A = (pq)A (Skalar için Birlesme Özelligi-Associative property for sca-lars)
Tanım 2.1.3 (Matris Çarpımı-Matrix Multiplication)
A = (aij)mxn, B = (bjk)nxl, 1 ≤ i ≤ m, 1 ≤ j ≤ n, 1 ≤ k ≤ l matrisleri için
AB = C = (cik)mxl, 1 ≤ i ≤ m, 1 ≤ k ≤ l
cik =
n∑j=1
aijbjk = ai1b1k + ai2b2k + · · ·+ ainbnk, 1 ≤ i ≤ m, 1 ≤ k ≤ l
Örnek 2.1.2
A =
(2 3−1 4
), B =
(5 −2 13 8 −6
)olsun. Bu durumda
C = AB =
(2.5 + 3.3 2.(−2) + 3.8 2.1 + 3.(−6)
(−1).5 + 4.3 (−1).(−2) + 4.8 (−1).1 + 4.(−6)
)olur.
Tanım 2.1.4 x1, x2, · · · , xn bilinmeyenler olmak üzere m denklemden olusanlineer denklem sistemi asagıdaki gibi yazılır:
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...ai1x1 + ai2x2 + · · ·+ ainxn = bi
...am1x1 + am2x2 + · · ·+ amnxn = bm
veya matris formundaAx = b
14

Matrisler ve Vektörler (Matrices and Vectors)
seklinde yazılır. Burada
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...am1 am2 · · · amj · · · amn
mxn
, x =
x1
x2...xn
, b =
b1b2...bm
olur. A matrisine katsayılar matrisi (coefficient matrix) denir. x vektörübilinmeyenleri (unknowns) içerir. Bilinmeyenler x1, x2, · · · , xn olur.
Örnek 2.1.32x1 + 3x2 − 4x3 + x4 = 5
−2x1 + x3 = 73x1 + 2x2 − 4x4 = 3
lineer denklem sistemi Ax = b formunda yazıldıgında
A =
2 3 −4 1−2 0 1 03 2 0 −4
, x =
x1
x2
x3
x4
, b =
573
olur.
Not: Bir lineer denklem sisteminin çözümü için asagıdaki üç durumdan birisöz konusudur:
• Tek çözüm (unique solution) vardır.
• Çözüm (no solution) yoktur.
• Sonsuz çözüm (infinitely many solutions) vardır.
Örnek 2.1.4 Örnegin
(1)x1 + x2 = 5x1 − x2 = 3
denklem sisteminin x1 = 4, x2 = 1 tek çözümü vardır.
(2)x1 + x2 = 5−x1 − x2 = 4
denklem sisteminin çözümü yoktur.
15

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(3)x1 + x2 = 5−x1 − x2 = −5
denklem sisteminin sonsuz çözümü vardır. Birinci denklem ile ikinci denk-lem aynıdır. Birinci denklemden x2 = 5 − x1 (ikinci denklemdende aynısı)olur. Bu durumda sonsuz çözüm S = {(t, 5− t) | t ∈ R} formundadır.
Tanım 2.1.5 Asagıda özel matrislerin tanımları verilmistir.
(1)
Inxn =
1 0 · · · 0 · · · 00 1 · · · 0 · · · 0...
.... . .
......
0 0 · · · 1 · · · 0...
......
. . ....
0 0 · · · 0 · · · 1
nxn
matrisine birim matirs (identity matrix) denir.
(2) Eger A = (aij)nxn, 1 ≤ i, j ≤ n matrisi için i > j oldugunda aij = 0 kosulusaglanıyorsa bu matrise üst üçgen matris (upper triangular matrix)denir.
A =
a11 a12 a13 a14 · · · a1n
0 a22 a23 a24 · · · a2n
0 0 a33 a34 · · · a3n
. . . . . . . . . . . .0 0 0 · · · an−1n−1 an−1n
0 0 0 · · · 0 ann
nxn
(3) Eger A = (aij)nxn, 1 ≤ i, j ≤ n matrisi için i < j oldugunda aij = 0 kosulusaglanıyorsa bu matrise alt üçgen matris (lower triangular matrix)denir
A =
a11 0 0 0 · · · 0a21 a22 0 0 · · · 0a31 a32 a33 0 · · · 0. . . . . . . . . . . .
an−1,1 an−1,2 an−1,3 · · · an−1,n−1 0an1 an2 an3 · · · an,n−1 ann
nxn
(4) Eger A = (aij)nxn, 1 ≤ i, j ≤ n matrisi için i 6= j oldugunda aij = 0 kosulu
16

Matrisler ve Vektörler (Matrices and Vectors)
saglanıyorsa bu matrise kösegen matris (diagonal matrix) denir
A =
a11 0 0 0 · · · 00 a22 0 0 · · · 00 0 a33 0 · · · 0. . . . . . . . . . . .0 0 0 · · · an−1,n−1 00 0 0 · · · 0 ann
nxn
(5) Kösegen matriste aii = c ise, bu matrise skalar matris(scalar matrix) denir.Yani, A = cI olur.
(6) A = (aij)mxn, 1 ≤ i ≤ m, 1 ≤ j ≤ n matrisi için AT = (aji)nxm, 1 ≤ i ≤ n, 1 ≤j ≤ m matrisine A matrisinin transpozesi (transpose of matrix A) denir.
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...am1 am2 · · · amj · · · amn
mxn
ise
AT =
a11 a21 · · · ai1 · · · am1
a12 a22 · · · ai2 · · · am2...
......
...a1j a2j · · · aij · · · amj...
......
...a1n a2n · · · ain · · · amn
nxm
olur.
(7) AT = A özelligini saglayan matrise simetrik matris (symmetric matrix)denir. Örnegin
A =
1 2 32 4 53 5 6
matrisi simetrik bir matristir.
Tanım 2.1.6 Eger A = (aij)nxn, 1 ≤ i, j ≤ n matrisi için AB = BA = I kosulunusaglayan B matrisi varsa A matrisine tersinir (invertible/ nonsingular) matrisdenir. Aksi durumda tersi olmayan (singular) matris denir. Eger A tersinir iseB = A−1 olarak gösterilir. A−1 matrisine A matrisinin tersi/inverse denir.
17

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Teorem 2.1.3 A,B tersinir matrisler için (AB)−1 = B−1A−1 esitligi dogrudur.Aynı zamanda (A−1)−1 = A esitligi dogrudur.
Teorem 2.1.4 Ax = b denklem sisteminin çözümü x1 ve Ax = 0 denklem siste-minin çözümü x2 olmak üzere x1 + x2, Ax = b denklem sisteminin çözümüdür.Ax = 0 denklem sistemine homojen lineer denklem sistemi (homogeneous linearsystem of equations) denir.
Teorem 2.1.5 Ax = b denklem sisteminin bir tek çözümü olması için gerek veyeter kosul Ax = 0 denklem sisteminin 0 çözümünün olmasıdır.
Teorem 2.1.6 A = (aij)mxn, 1 ≤ i ≤ m, 1 ≤ j ≤ n matrisi için Ax = b denklemsisteminde m < n ise sıfır olmayan çözümlere sahiptir.
Örnek 2.1.5 Örneginx1 + 2x2 − x3 = 0x1 − x2 + x3 = 0
denklem sistemini saglayan ve sıfır olmayan sonsuz çözüm vardır. Çözüm nok-taları
S =
{(−1
3t,
2
3t, t
)| t ∈ R
}formundadır.
Teorem 2.1.7 A = (aij)mxn, 1 ≤ i ≤ m, 1 ≤ j ≤ n matrisi için Ax = b denklemsisteminin tüm b vektörleri için tek bir çözümü varsa AB = I kosulunu saglayanbir B = (bij)nxm, 1 ≤ i ≤ n, 1 ≤ j ≤ m matrisi vardır.
Teorem 2.1.8 Eger B ve C matrisleri için BC = I kosulu saglanıyorsa Cx = 0denklem sisteminin x = 0 seklinde asikar çözümü (trivial solution) vardır.
Teorem 2.1.9 A = (aij)mxn, 1 ≤ i ≤ m, 1 ≤ j ≤ n matrisi için Ax = b denklemsisteminin tüm b vektörleri için tek bir çözümü varsa m ≤ n dir.
Tanım 2.1.7 (Determinant) Bir kare matrisin determinantı, o matrisi bir sa-yıya esleyen fonksiyondur.
Sözkonusu fonksiyonun degerine o matrisin determinantı denir. A kare birmatris ise, determinantı detA ya da |A| ile gösterilir.
18

Matrisler ve Vektörler (Matrices and Vectors)
(i) 1x1 matrisin determinantı A = (12) ise detA = 12, A = (−12) ise detA =−12 olur.
(ii) 2x2 matrislerin determinantı
A =
(−1 32 −4
)ise detA = (−1).(−4)− 3.2 = −2 olur. Genel olarak
A =
(a bc d
)matrisinin determinantı
detA = a.d− b.colarak tanımlıdır.
(iii) 3x3 matrislerin determinantı için Sarrus yöntemi vardır. Bu yöntemdeilk iki satır matrisin asagısına yazılır ve kösegenden baslayarak yuka-rıdan asagıya çapraz çarpımlar yapılıp toplanır, yine kösegenden basla-yarak asagıdan yukarıya çarpımlar yapılıp bu toplamdan çıkarılır. Aynısekilde ilk iki sütun ile de aynı islem yapılabilir. Ilk iki sütun matrisinsag tarafına yazılır, kösegenden baslayarak yukarıdan asagıya çaprazçarpımlar yapılıp toplanır, yine kösegenden baslayarak asagıdan yuka-rıya çarpımlar yapılıp bu toplamdan çıkarılır. Örnegin,
A =
2 3 51 0 12 1 0
matrisinin determinantı için Sarrus yönteminde
2 3 51 0 12 1 02 3 51 0 1
yazılır. Kösegenden baslayarak yukarıdan asagıya çapraz çarpımlar ya-pılıp toplanır, yine kösegenden baslayarak asagıdan yukarıya çarpımlaryapılıp bu toplamdan çıkarılır.
detA = 2.0.0 + 1.1.5 + 2.3.1− 2.0.5− 2.1.1− 1.3.0 = 9
olarak bulunur.
A =
a b cd e fg k h
19

Lineer Denklem Sistemleri (Sytems of Linear Equations)
matrisi için Sarrus yönteminde
a b cd e fg k ha b cd e f
yazılır.detA = aeh+ dkc+ gbf − gec− akf − dbh
olur.
Sarrus yöntemi sadece 3x3 determinantlar için uygulanır, daha büyük bo-yutlu matrislere uygulanamaz. O nedenle her boyutta matrise uygulanabi-lecek bir yönteme gereksinim vardır.
Yüksek boyutlu matrislerin determinantlarının hesaplanması
Laplace yöntemi ile her boyutta matrisin determinantı bulunablir. Islemlerikısaltmak için Gauss yok etme metodu oldukça pratik bir yöntemdir.
Laplace yöntemi
Tanım 2.1.8 (Minör)
nxn tipinden
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · amj · · · ann
nxn
matrisinin herhangi bir aij elemanının minörü söyle tanımlıdır: Matristen i. sa-tır j. sütun atılır. Geri kalan matrisin determinantı aij elemanının minörüdür.min(aij) veya Mij olarak gösterilir. (−1)i+jMij = αij ifadesine de aij elemanınınkofaktörü denir.
Örnek 2.1.6
A =
2 3 51 0 12 1 0
matrisinin ikinci satırına göre minörleri bulalım. a21 elemanının minörü
M21 =
∣∣∣∣ 3 51 0
∣∣∣∣ = 3.0− 5.1 = −5
20

Matrisler ve Vektörler (Matrices and Vectors)
olur. a21 = 1 elemanının kofaktörü (−1)2+1M21 = 5 = α21 olur.
a22 elemanının minörü
M22 =
∣∣∣∣ 2 52 0
∣∣∣∣ = 2.0− 5.2 = −10
olur. a22 = 0 elemanının kofaktörü (−1)2+2M22 = −10 = α22 olur.
a23 elemanının minörü
M23 =
∣∣∣∣ 2 32 1
∣∣∣∣ = 2.1− 3.2 = −4
olur. a23 = 1 elemanının kofaktörü (−1)2+3M23 = 4 = α23 olur.
Tanım 2.1.9 (Determinant için Laplace yöntemi)
nxn boyutlu bir A kare matrisi için
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · amj · · · ann
nxn
determinant i. satıra göre kofaktörler yardımı ile asagıdaki gibi hesaplanabilir:
detA =n∑j=1
aij(−1)i+jMij =n∑j=1
aijαij
Aynı sekilde diger satır veya sütunlara görede hesaplanabilir.
Örnek 2.1.7
A =
2 3 51 0 12 1 0
determinantını Laplace yöntemi ile bulalım.
Örnek 2.1.6 Ikinci satıra göre minörleri ve kofaktörleri bulmustuk. Matrisin de-terminantı Sarrus yöntemiyle
detA = 9
21

Lineer Denklem Sistemleri (Sytems of Linear Equations)
olarak bulmustuk. Minörleri kullanarak determinant
detA = a21(−1)2+1M21 + a22(−1)2+2M22 + a23(−1)2+3M23
= 1.(−1)2+1.(−5) + 0.(−1)2+2(−10) + 1.(−1)2+3.(−4) = 5 + 4 = 9
yada kofaktörleri kullanarak determinant
detA = a21α21 + a22α22 + a23α23 = 1.5 + 0.(−10) + 1.4 = 9
olur.
Simdi birinci satıra göre determinant bulalım. a11 elemanının minörü
M11 =
∣∣∣∣ 0 11 0
∣∣∣∣ = −1
olur. a11 elemanının kofaktörü (−1)1+1M11 = −1 = α11 olur.
a12 elemanının minörü
M12 =
∣∣∣∣ 1 12 0
∣∣∣∣ = −2
olur. a12 elemanının kofaktörü (−1)1+2M12 = 2 = α12 olur.
a13 elemanının minörü
M13 =
∣∣∣∣ 1 02 1
∣∣∣∣ = 1
olur. a13 elemanının kofaktörü (−1)1+3M13 = 1 = α13 olur.
Yani, sırasıyla birinci satır elemanlarının minörleri:
M11 = −1,M12 = −2,M13 = 1
ve kofaktörleri:α11 = −1, α12 = 2, α13 = 1
olmaktadır. Bu durumda birinci satıra göre açarsak, kofaktörler ile determinant
detA = a11α11 + a12α12 + a13α13 = 2.(−1) + 3.2 + 5.1 = 11− 2 = 9
olarak bulunur.
Determinant hesabı yapılırken en çok sıfır olan satır veya sütuna göre açılımyapılırsa islem kolaylıgı saglanır. Çünkü hesapta elemanların kofaktörlerleçarpımı toplanmaktadır. Sıfır olan elemanların kofaktörlerini hesaplamayagerek yoktur. Çünkü o elemanların determinanta yani toplama bir katkısıbulunmamaktadır.
Lineer denklem sistemi ve determinant arasındaki baglantı asagıdaki teoremdeverilmistir.
22

Matrisler ve Vektörler (Matrices and Vectors)
Teorem 2.1.10 A = (aij)mxn, 1 ≤ i ≤ m, 1 ≤ j ≤ n matrisi için asagıdaki ifade-ler denktir.
(1) Ax = 0 homojen denklem sisteminin çözümü x = 0 asikar (trivial solution)çözümdür.
(2) Ax = b denklem sisteminin tüm b için tek bir çözümü (unique solution)vardır.
(3) A tersinir (nonsingular/invertible) bir matristir.
(4) det A 6= 0
Determinantın Özellikleri (Properties of Determinant)
Determinatın özelliklerini genel durumda ispat etmek yerine, 2x2 boyutlu de-terminantlar için göstermekle yetinecegiz.
(1) Bir matrisin determinantı devriginin determinantına esittir.
Örnegin, 2x2 matris için
A =
(a bc d
), AT =
(a cb d
)olur. Determinantlar arasında
|A| =∣∣∣∣ a bc d
∣∣∣∣ = ad− bc =
∣∣∣∣ a cb d
∣∣∣∣ = |AT |
esitligi vardır. Yani, detA = detAT olur.
(2) Üst üçgen, alt üçgen ve kösegen matrislerin determinantı asal kösegenüzerindeki elemanların çarpımına esittir.
Örnegin,
|A| =∣∣∣∣ a b
0 d
∣∣∣∣ = ad =
∣∣∣∣ a 0b d
∣∣∣∣ = |AT |
olur. Kösegen matris için
|D| =∣∣∣∣ a 0
0 d
∣∣∣∣ = ad
olur.
(3) Matrisin iki satırı kendi aralarında yer degistirirse determinantları tersisaretli olur. Aynı özellik sütunlar için de geçerlidir.
23

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnegin, satırları yer degistirdigimizde determinantlar arasındaki iliski
A =
(a bc d
), B =
(c da b
)olsun. Bu durumda detA = ad− bc,detB = cb− ad olur. Yani
detB = −detA
Sütunları yer degistirdigimizde determinantlar arasındaki iliski
A =
(a bc d
), C =
(b ad c
)olsun. Bu durumda detA = ad− bc,detC = bc− da olur. Yani
detC = −detA
olur.
(4) Matrisin bir satırı sıfırdan farklı bir sabit ile çarpılırsa λ 6= 0, λ ∈ R,determinantı da o sayı ile çarpılmıs olur. Aynı özellik sütun içinde ge-çerlidir.
Örnegin,
A =
(a bc d
), B =
(λa λbc d
)olsun. Bu durumda detA = ad− bc,detB = λad− λbc = λ(ad− bc), yani
detB = λ detA
olur.
Eger A, nxn matrisin kendisi λ 6= 0, λ ∈ R sayısı ile çarpılırsa
det(λA) = λn detA
olur. Örnegin,
A =
(a bc d
), λA =
(λa λbλc λd
)olsun. Bu durumda det(λA) = λ2ad − λ2bc = λ2(ad − bc) = λ2 detA olur.Yani
det(λA) = λ2 detA
olur.
24

Matrisler ve Vektörler (Matrices and Vectors)
(5) Matrisin bir satırı sıfırdan farklı bir sabit ile çarpılıp λ 6= 0, λ ∈ R baskabir satıra eklenirse, determinant degismez. Aynı özellik sütun içinde ge-çerlidir.
Örnegin, ikinci satırın λ katını birinci satıra ekleyelim:
A =
(a bc d
), B =
(a+ λc b+ λdc d
)olsun. Bu durumda detA = ad− bc ve
detB = (a+ λc)d− (b+ λd)c = ad+ λcd− bc− λdc = ad− bc
olur. YanidetA = detB
olur.
Ikinci sütunun λ katını birinci sütuna ekleyelim:
A =
(a bc d
), C =
(a+ λb bc+ λd d
)olsun. Bu durumda detA = ad− bc ve
detC = (a+ λb)d− b(c+ λd) = ad+ λbd− bc− λbd = ad− bc
olur. YanidetA = detC
olur. Aynı esitlikler birinci satırın (sütunun) λ katını ikinci satıra (sü-tuna) ekledigimizde de geçerlidir.
(6) Iki matrisin çarpımının determinantı determinantlarının çarpımına esit-tir.
Örnegin,
A =
(a bc d
), B =
(e fg h
)olsun.
AB =
(a bc d
)(e fg h
)=
(ae+ bg af + bhce+ dg cf + dh
)olur.
det(AB) = (ae+bg)(cf+dh)−(ce+dg)(af+bh) = (ad−bc)(eh−fg) = detAdetB
olur.
25

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(7) detA 6= 0 ise A matrisinin tersi vardır. A matrisinin tersi varsa detA 6= 0olur. Örnegin
A =
(a bc d
)matrisinin tersi detA 6= 0 olmak kosuluyla
A−1 =1
detA
(d −b−c a
)matrisidir.
(8) detA 6= 0 olmak üzere ters matrisin determinantı için
det(A−1) =1
detA
esitligi dogrudur. Bu esitlik A−1A = AA−1 = I esitliginde her tarafındeterminantı alınarak gösterilebilir.
det(A−1A) = det(AA−1) = det(I)
buradandet(A−1) detA = detAdet(A−1) = det I = 1
esitliginden
det(A−1) =1
detA
elde edilir.
2.2 Lineer Denklem Sistemleri için Çözüm Yöntemleri(Solution Methods for Systems of Linear Equations)
Genel olarak lineer denklem sistemlerini çözmek için iki tip yöntem vardır:
(1) Direkt yöntemler: Bu yöntemlerde çözüm aritmetik islemlerle hesapla-nır. Yöntemlerden biri Cramer kuralıdır, sadece tek çözüm oldugundatek çözüm bulunabilir. Diger yöntemlerde denklem sistemi kendine denkolan üçgensel bir sisteme dönüstürülür. Gauss eleme yönteminde üstveya alt üçgen forma getirilir. Gauss-Jordan yönteminde kösegen sis-tem (birim matris) haline getirilir. LU ayrıstırma yönteminde bir alt üç-gen birde üst üçgen sistem çözülür. LU ayrıstırma için üç yöntem sı-rasıyla; Doolittle yöntemi, Crout yöntemi ve Gauss eleme yöntemindekikatsayılar kullanılarak yapılır.
26
Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
(2) Iteratif Yöntemler: Baslangıç yaklasık çözüm kabul edilir ve sonra ite-ratif olarak daha iyi çözümler elde edilmeye çalısılır. Jacobi yöntemi veGauss-Seidel yöntemi iteratif yöntemlerdir.
Üçgensel Sistemler (Triangular Systems)
(1) Üst Üçgen Form (Upper Triangular Form):Lineer denklem sistemi
a11x1 +a12x2 +a13x3 + · · · +a1,n−1xn−1 +a1nxn = b1a22x2 +a23x3 + · · · +a2,n−1xn−1 +a2nxn = b2
a33x3 + · · · +a3,n−1xn−1 +a3nxn = b3...
... =...
an−1,n−1xn−1 +an−1,nxn = bn−1
annxn = bn
seklinde iseaii 6= 0, i = 1, 2, · · · , n olmak üzere lineer denklem sisteminin çözümü
xn =bnann
, xn−1 =bn−1 − an−1,nxn
an−1,n−1,
...
x3 =b3 − a34x4 − · · · − a3,n−1xn−1 − a3nxn
a33
x2 =b2 − a23x3 − · · · − a2,n−1xn−1 − a2nxn
a22
x1 =b1 − a12x2 − a13x3 − · · · − a1,n−1xn−1 − a1nxn
a11
olur. Bu isleme geri koyma (back substitution) veya geri eleme yöntemidenir.Örnek 2.2.1 Asagıdaki lineer denklem sisteminin (üst üçgen form) çözü-münü bulalım.
x1 +4x2 −3x3 −x4 = 16−x2 −x3 −11x4 = −1313x3 +128x4 = 115−5x4 = −5
Çözüm
−5x4 = −5 =⇒ x4 = 113x3 + 128x4 = 115 =⇒ 13x3 + 128 = 115 =⇒ x3 = −1−x2 − x3 − 11x4 = −13 =⇒ −x2 − 10 = −13 =⇒ x2 = 3
x1 + 4x2 − 3x3 − x4 = 16 =⇒ x1 + 12 + 3− 1 = 16 =⇒ x1 = 2
olur.
27

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(2) Alt Üçgen Form (Lower Triangular Form):
Lineer denklem sistemi
a11x1 = b1a21x1 +a22x2 = b2a31x1 +a32x2 +a33x3 = b3
...... =
...an−1,1x1 +an−1,2x2 +an−1,3x3 + · · · +an−1,n−1xn−1 = bn−1
an1x1 +an2x2 +an3x3 + · · · +an,n−1xn−1 +annxn = bn
seklinde ise
aii 6= 0, i = 1, 2, · · · , n olmak üzere lineer denklem sisteminin çözümü
x1 =b1a11
, x2 =b2 − a21x1
a22,
x3 =b3 − a31x1 − a32x2
a33
...
xn =bn − an1x1 − an2x2 − · · · − an,n−1xn−1
ann
olur. Bu isleme ileri koyma (forward substitution) veya ileri eleme yön-temi denir.
Örnek 2.2.2 Asagıdaki lineer denklem sisteminin (alt üçgen form) çözü-münü bulalım.
2x1 = 6−x1 +4x2 = 53x1 −2x2 −x3 = 4x1 −2x2 +6x3 +3x4 = 2
Çözüm
2x1 = 6 =⇒ x1 = 3−x1 + 4x2 = 5 =⇒ −3 + 4x2 = 5 =⇒ x2 = 2
3x1 − 2x2 − x3 = 4 =⇒ 5− x3 = 4 =⇒ x3 = 1x1 − 2x2 + 6x3 + 3x4 = 2 =⇒ 5 + 3x4 = 2 =⇒ x4 = −1
olur.
(3) Kösegen Form (Diagonal Form):
28

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Lineer denklem sistemi
a11x1 = b1a22x2 = b2
a33x3 = b3. . . =
...annxn = bn
seklinde ise
aii 6= 0, i = 1, 2, · · · , n olmak üzere lineer denklem sisteminin çözümü
x1 =b1a11
, x2 =b2a22
, · · · , xn =bnann
olur.
Örnek 2.2.3 Asagıdaki lineer denklem sisteminin (kösegen form) çözü-münü bulalım.
3x1 = 64x2 = 16−2x3 = 85x4 = 1
Çözüm3x1 = 6 =⇒ x1 = 24x2 = 16 =⇒ x2 = 4−2x3 = 8 =⇒ x3 = −45x4 = 1 =⇒ x4 = 1/5
olur.
Cramer Kuralı (Cramer’s Rule)
n bilinmeyenli n lineer denklemden olusan lineer denklem sistemi
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
...ai1x1 + ai2x2 + · · ·+ ainxn = bi
...an1x1 + an2x2 + · · ·+ annxn = bn
Matris formundaAx = b
29

Lineer Denklem Sistemleri (Sytems of Linear Equations)
seklinde yazılır. Burada
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
nxn
, x =
x1
x2...xn
, b =
b1b2...bn
olur. Eger detA 6= 0 ise denklem sisteminin çözümü Cramer kuralı ile asagı-daki gibi bulunur:
xi =detAidetA
, i = 1, 2, · · · , n
Burada Ai matrisi, A matrisinin i. sütununun b vektörü (denklem sistemininsag taraf sabitleri) ile yer degistirilmesi ile elde edilen matristir.
Örnek 2.2.4 Asagıdaki lineer denklem sisteminin çözümünü (varsa) Cramerkuralı ile bulunuz.
6x1 + 2x2 + x3 = 5−x1 − 3x2 + 2x3 = 1−2x1 + x2 − 3x3 = −5
A =
6 2 1−1 −3 2−2 1 −3
=⇒ detA = 21
detA 6= 0 oldugu için denklem sisteminin tek bir çözümü vardır.
A1 =
5 2 11 −3 2−5 1 −3
=⇒ detA1 = 7
A2 =
6 5 1−1 1 2−2 −5 −3
=⇒ detA2 = 14
A3 =
6 2 5−1 −3 1−2 1 −5
=⇒ detA3 = 35
olarak bulunur. Bu durumda denklem sisteminin çözümü
x1 =detA1
detA=
1
3, x2 =
detA2
detA=
2
3, x3 =
detA3
detA=
5
3
olarak bulunur.
30

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Eger detA 6= 0 ise Cramer yöntemi ile çözüm bulunamaz. Böyle bir durumdalineer denklem sisteminin ya hiç çözümü yoktur ya da sonsuz çözümü vardır.
Not:
• Eger detA 6= 0 ise denklem sisteminin tek çözümü vardır.
• Eger detA = 0 ve detAi = 0, i = 1, 2, · · · , n ise denklem sisteminin sonsuzçözümü vardır.
• Eger detA = 0 ve en az bir tane detAi 6= 0 ise denklem sisteminin çözümüyoktur.
Örnek 2.2.5 Örnegin
(1)x1 + x2 = 5x1 − x2 = 3
denklem sisteminde detA = −2 6= 0 olur. Tek çözüm vardır. x1 = 4, x2 = 1tek çözüm olarak bulunur.
(2)x1 + x2 = 5−x1 − x2 = 4
denklem sisteminde detA = 0,detA1 = −9 6= 0 oldugundan denklem siste-minin çözümü yoktur.
(3)x1 + x2 = 5−x1 − x2 = −5
denklem sisteminde detA = 0 ve detA1 = detA2 = 0 oldugundan denklemsisteminin sonsuz çözümü vardır. Birinci denklem ile ikinci denklem aynı-dır. Birinci denklemden x2 = 5 − x1 (ikinci denklemdende aynısı) olur. Budurumda sonsuz çözüm S = {(t, 5− t) | t ∈ R} formundadır.
2.2.1 Gauss Eleme Yöntemi (Gauss Elimination Method)
Lineer denklem sistemlerini çözmek için kullandıgımız yok etme (eleme) yön-teminde asagıda verilen elementar satır islemleri uygulanarak çözülmesi iste-nen lineer denklem sistemine denk ancak çözümü daha kolay olan denklemsistemi elde edilir. Bir lineer denklem sistemine elementar islemler (elemen-tary transformation/elementary row operations) uygulandıgında bu lineerdenklem sistemine denk (equivalent systems) daha basit bir lineer denklemsistemi olusturabiliriz. Ri denklem sistemi için yazılan matrisin i. satırı, c ∈ Rise sıfırdan farklı bir sabit olsun. Bu elementar islemleri söyle sıralayabiliriz:
31

Lineer Denklem Sistemleri (Sytems of Linear Equations)
• Denklemlerin yerini degistirme (Swap/interchange the positions of tworows) i 6= j olmak üzere
Ri ↔ Rj
• Denklemlerden birini sıfırdan farklı bir c ∈ R sayısı ile çarpma (Multiplya row by a nonzero scalar)
cRi → Ri, c 6= 0
• Denklemlerden birinin sıfırdan farklı bir c ∈ R sayısı ile çarpımını birdiger denkleme eklemek (Multiply a row by a nonzero scalar and add toanother row)
cRi +Rj → Rj
Örneginx1 + x2 = 5x1 − x2 = 3
denklem sisteminde
• Denklemlerin yerini degistirirsek: R1 ↔ R2
x1 − x2 = 3x1 + x2 = 5
bu denklem sistemi ilk basta verilen lineer denklem sistemine denktir.
• Denklemlerden birini (diyelim ki ilkini) sıfırdan farklı c = 2 sayısı ileçarpalım (c ∈ R herhangi bir reel sayı olabilir): 2R1 → R1
2x1 + 2x2 = 10x1 − x2 = 3
yine bu denklem sistemi ilk basta verilen lineer denklem sistemine denk-tir.
• Denklemlerden birinin sıfırdan farklı bir c ∈ R sayısı ile çarpımını birdiger denkleme eklemek: Diyelim ki ilk denklemin −1 katını ikinci denk-leme ekleyelim −R1 +R2 → R2
−x1 − x2 = −5x1 − x2 = 3
Denklemleri taraf tarafa toplayalım
−2x2 = −2 =⇒ x2 = 1
olur. Bu bildigimiz eleme yöntemi ile bilinmeyenleri bulma islemidir.
32

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Genel durumda asagıdaki teorem ile ifade edelim.
Teorem 2.2.1 (Temel Dönüsümler-Elementary Transformation) Bir lineer denk-lem sistemine asagıdaki islemler uygulandıgında elde edilen sistem bu sistemedenktir.• Iki denklemin yerini degistirme: Örnegin
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...bi...bn
sistemi ile
a11 a12 · · · a1j · · · a1n
ai1 ai2 · · · aij · · · ain...
......
...a21 a22 · · · a2j · · · a2n...
......
...an1 an2 · · · anj · · · ann
x1
xi...xn...xn
=
b1bi...b2...bn
sistemi denktir. Burada örnek olarak 2. satır ile i. satır degistirilmistir,yani
R2 ↔ Ri
islemi yapılmıstır.• Bir denklemi sıfırdan farklı bir sabit c ∈ R, c 6= 0 ile çarpma. Örnegin
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...bi...bn
sistemi ile c 6= 0 için
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...cai1 cai2 · · · caij · · · cain
......
......
an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...cbi...bn
33

Lineer Denklem Sistemleri (Sytems of Linear Equations)
sistemi denktir. Burada örnek olarak i. satır c sayısı ile çarpılmıstır, yanicRi → Ri islemi yapılmıstır.
• Bir denklemin sıfırdan farklı bir katını diger denkleme eklemek:
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...cai1 cai2 · · · caij · · · cain
......
......
an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...cbi...bn
sistemi c 6= 0 için
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ca21 + ai1 ca22 + ai2 · · · ca2j + aij · · · ca2n + ain
......
......
an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...
cb2 + bi...bn
sistemi denktir. Burada örnek olarak 2. satırın c katı i. satıra eklenmistir,yani cR2 +Ri → Ri islemi yapılmıstır.
Tanım 2.2.1 (Eselon Matris/ Row Echelon Form)
Asagıdaki üç kosulu saglayan matrise eselon matris/row echelon form de-nir:
(1) Her satırın soldan itibaren sıfırdan farklı ilk girdisi 1’dir. (Bazı kaynak-larda 1 olmasına gerek yok)
(The first non-zero element in each row called the leading entry is 1)
(2) Bir satırın sıfırdan farklı ilk girdisinin bulundugu sütun, kendisinden ön-ceki satırın sıfırdan farklı ilk girdisinin bulundugu sütunun sagındadır.
(Each leading entry is in a column to the right of the leading entry in theprevious row)
(3) Tüm girdileri sıfır olan tüm satırlar, sıfırdan farklı girdisi bulunan satırlar-dan sonra gelir.
(Rows with all zero elements, if any, are below rows having a non-zeroelement.)
34

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Örnek 2.2.6 Örnegin,
1 2 3 40 0 1 30 0 0 1
,
1 2 3 40 0 1 30 0 0 10 0 0 0
,
1 20 10 0
,
1 a b c d0 0 1 e f0 0 0 1 g
matrisleri eselon formdadır.
Gauss eleme yönteminde denklem sistemine ait olan matris eselon forma ge-tirilir. Eselon form tek degildir, bir matrisin birden fazla eselon formu olabilir.
Tanım 2.2.2 (Indirgenmis Eselon Matris/ Reduced Row Echelon Form)
Asagıdaki kosulları saglayan matrise indirgenmis eselon matris/reducedrow echelon form denir:
(1) Matris eselon formda olmalı
(2) Bir satıurın sıfırdan farklı ilk girdisinin bulundugu sütundaki diger girdi-lerin hepsi sıfır olmalı.
(The leading entry in each row is the only non-zero entry in its column.)
Örnek 2.2.7 Örnegin,
1 2 0 00 0 1 00 0 0 1
,
1 2 0 00 0 1 00 0 0 10 0 0 0
,
1 00 10 0
,
1 0 a 0 b0 1 c 0 d0 0 0 1 e
,
1 0 00 1 00 0 1
,
0 1 0 00 0 0 10 0 0 00 0 0 0
,
1 0 0 20 0 1 −10 0 0 0
matrisleri indirgenmis eselon formdadır.
Gauss Jordan yönteminde denklem sistemine ait olan matris indirgenmiseselon forma getirilir. Indirgenmis eselon form tektir, bir matrisin sadece birtane indirgenmis eselon formu vardır.
Bir matrisi elementar satır islemleri kullanarak eselon veya indirgenmis ese-lon forma getirmek mümkündür.
35

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnek 2.2.8
A =
(2 1 81 3 9
)matrisinin eselon formunu bulalım.(
2 1 81 3 9
)7−→
R1 ↔ R2
(1 3 92 1 8
)7−→
−2R1 +R2 → R2
(1 3 90 −5 −10
)7−→
−15R2 → R2
(1 3 90 1 2
)matrisi A matrisinin eselon formudur.
Eger indirgenmis eselon form istenseydi asagıdaki islemi de yapacaktık:(1 3 90 1 2
)7−→
−3R2 +R1 → R1
(1 0 30 1 2
)matrisi A matrisinin indirgenmis eselon formudur.
Örnek 2.2.9
A =
1 −2 0 32 −1 3 60 1 7 0
matrisinin indirgenmis eselon formunu bulalım. 1 −2 0 3
2 −1 3 60 1 7 0
7−→−2R1 +R2 → R2
1 −2 0 30 3 3 00 1 7 0
7−→13R2 → R2
1 −2 0 30 1 1 00 1 7 0
7−→
−R2 +R3 → R3
1 −2 0 30 1 1 00 0 6 0
7−→2R2 +R1 → R1
1 0 2 30 1 1 00 0 6 0
7−→
16R3 → R3
1 0 2 30 1 1 00 0 1 0
7−→−R3 +R2 → R2
1 0 2 30 1 0 00 0 1 0
7−→
−2R3 +R1 → R1
1 0 0 30 1 0 00 0 1 0
matrisi A matrisinin indirgenmis eselon formudur.
36

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Tanım 2.2.3 (Genisletilmis Matris-Augmented Matrix)
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...bi...bn
sisteminde
[A | b] =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
b1b2...bi...bn
matrisine genisletilmis matris (augmented matrix) denir.
Örnek 2.2.10x1 + 2x2 − x3 = 2x2 + x3 − 2x4 = −3
2x1 + 4x2 + x3 − 3x4 = −2x1 − 4x2 − 7x3 − x4 = −19
denklem sistemi için genisletilmis matris1 2 −1 00 1 1 −22 4 1 −31 −4 −7 −1
∣∣∣∣∣∣∣∣2−3−2−19
olur.
Tanım 2.2.4 (Merkezi nokta-Pivot)
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
x1
x2...xi...xn
=
b1b2...bi...bn
denklem sisteminde aji, j = i + 1, · · · , n elemanlarını elemek için kullanılan aiielemanına merkezi nokta (pivot) denir.
37

Lineer Denklem Sistemleri (Sytems of Linear Equations)
ALGORITMA (Gauss Eleme/Gauss Elimination)
R1 : a11x1 + a12x2 + · · ·+ a1nxn = b1R2 : a21x1 + a22x2 + · · ·+ a2nxn = b2
......
...Ri : ai1x1 + ai2x2 + · · ·+ ainxn = bi
...Rn : an1x1 + an2x2 + · · ·+ annxn = bn
lineer denklem sisteminde 2. satırdaki a21 elemanını yok etmek için 1. satırı−a21a11
(a11 6= 0 olmak üzere) ile çarpıp 2. satırla topladıgımızda bu islemi
−a21
a11R1 +R2 → R2
ile ifade edilir. Benzer sekilde 3., 4., · · · , n. satırdaki a31, a41, · · · , an1 elemanla-rını yok etmek için 1. satırı sırasıyla
−a31
a11,−a41
a11, · · · ,−an1
a11
ile çarpıp 3., 4., · · · , n. satırlarla topladıgımızda elde ettigimiz sistem
−a21a11R1 +R2 → R2
−a31a11R1 +R3 → R3
...− ai1a11R1 +Ri → Ri...
−an1a11R1 +Rn → Rn
⇒ [A(1) | b] =
a11 a12 · · · a1j · · · a1n
0 a(1)22 · · · a
(1)2j · · · a
(1)2n
0 a(1)32 · · · a
(1)3j · · · a
(1)3n
......
......
0 a(1)i2 · · · a
(1)ij · · · a
(1)in
......
......
0 a(1)n2 · · · a
(1)nj · · · a
(1)nn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
b1
b(1)2...b(1)i...b(1)n
olarak elde ederiz. Burada a(1)22 pivot elemanıdır. Benzer sekilde 3., 4., · · · , n. sa-
tırdaki a(1)32 , a
(1)42 , · · · , a
(1)n2 elemanlarını yok etmek için 2. satırı −a
(1)32
a(1)22
,−a(1)42
a(1)22
, · · · ,−a(1)n2
a(1)22
(a(1)22 6= 0 olmak üzere) ile çarpıp 3., 4., · · · , n. satırlarla topladıgımızda elde edi-
38

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
len sistem
−a(1)32
a(1)22
R2 +R3 → R3
−a(1)42
a(1)22
R2 +R4 → R4
...
−a(1)i2
a(1)22
R2 +Ri → Ri
...
−a(1)n2
a(1)22
R2 +Rn → Rn
⇒ [A(2) |b] =
a11 a12 a13 · · · a1j · · · a1n
0 a(1)22 a
(1)23 · · · a
(1)2j · · · a
(1)2n
0 0 a(2)33 · · · a
(2)3j · · · a
(2)3n
......
......
0 0 · · · a(2)ij · · · a
(2)in
......
......
0 0 · · · a(2)nj · · · a
(2)nn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
b1
b(1)2
b(2)3...b(2)i...b(2)n
Bu sekilde islemlere devam ettigimizde sistemi asagıdaki gibi elde ederiz:
[A(n−1) | b] =
a11 a12 a13 a14 · · · a1n
0 a(1)22 a
(1)23 a
(1)24 · · · a
(1)2n
0 0 a(2)33 a
(2)34 · · · a
(2)3n
......
......
0 0 0 · · · a(n−2)n−1n−1 a
(n−2)n−1n
0 0 0... 0 a
(n−1)nn
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
b1
b(1)2
b(2)3...
b(n−2)n−1
b(n−1)n
veya
R1 : a11x1 + a12x2 + · · ·+ a1nxn = b1
R2 : 0x1 + a(1)22 x2 + · · ·+ a
(1)2n xn = b
(1)2 ,
......
...Rn : 0x1 + 0x2 + · · ·+ a
(n−1)nn xn = b
(n−1)n
olarak elde ederiz. Buna göre geri eleme yöntemi ile yukardaki (daha basit)denklem sistemini çözeriz.
m21 =a21
a11,m31 =
a31
a11,m41 =
a41
a11, · · · ,mn1 =
an1
a11
m32 =a
(1)32
a(1)22
,m42 =a
(1)42
a(1)22
, · · · ,mn2 =a
(1)n2
a(1)22
seklinde elde edilen sayılara Gauss çarpanları/multipliers denir.
Gauss eleme yönteminde yapılan denklem sisteminin genisletilmis matrisinineselon formunu bulmaktır. (Pivot elemanlar 1 yapılabilir veya yapılmayabilir.Pivot elemanını 1 yapmak için satır degisimi veya bir satırı sıfırdan farklı birsayıyla çarpma islemleri kullanılabilir.)
39
Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnek 2.2.11x1 + 2x2 − x3 = 2x2 + x3 − 2x4 = −3
2x1 + 4x2 + x3 − 3x4 = −2x1 − 4x2 − 7x3 − x4 = −19
denklem sisteminin varsa çözümünü Gauss eleme yöntemi ile bulalım.Bu örnekte pivot elemanı 1 yapılarak Gauss eleme yöntemi uygulanacaktır.Denklem sistemi için genisletilmis matris
1 2 −1 00 1 1 −22 4 1 −31 −4 −7 −1
∣∣∣∣∣∣∣∣2−3−2−19
olur.
1 2 −1 00 1 1 −22 4 1 −31 −4 −7 −1
∣∣∣∣∣∣∣∣2−3−2−19
=−2R1 +R3 → R3
−R1 +R4 → R4
1 2 −1 00 1 1 −20 0 3 −30 −6 −6 −1
∣∣∣∣∣∣∣∣2−3−6−21
=
13R3 → R3
6R2 +R4 → R4
1 2 −1 00 1 1 −20 0 1 −10 0 0 −13
∣∣∣∣∣∣∣∣2−3−2−39
=− 1
13R4 → R4
1 2 −1 00 1 1 −20 0 1 −10 0 0 1
∣∣∣∣∣∣∣∣2−3−23
Buradan
x4 = 3x3 − x4 = −2 =⇒ x3 = −1
x2 + x3 − 2x4 = −3 =⇒ x2 = 2x1 + 2x2 − x3 = 2 =⇒ x1 = −1
olarak bulunur.
Örnek 2.2.122x1 + 4x2 − 4x3 = 12
x1 + 5x2 − 5x3 − 3x4 = 182x1 + 3x2 + x3 + 3x4 = 8x1 + 4x2 − 2x3 + 2x4 = 8
denklem sisteminin varsa çözümünü Gauss eleme yöntemi ile bulalım.Bu örnekte pivot elemanı 1 yapılmadan Gauss eleme yöntemi uygulanacaktır.Denklem sistemi için genisletilmis matris
2 4 −4 01 5 −5 −32 3 1 31 4 −2 2
∣∣∣∣∣∣∣∣121888
40

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
olur. 2 4 −4 01 5 −5 −32 3 1 31 4 −2 2
∣∣∣∣∣∣∣∣121888
=
−12R1 +R2 → R2
−R1 +R3 → R3
−12R1 +R4 → R4
2 4 −4 00 3 −3 −30 −1 5 30 2 0 2
∣∣∣∣∣∣∣∣1212−42
=13R2 +R3 → R3
−23R2 +R4 → R4
2 4 −4 00 3 −3 −30 0 4 20 0 2 4
∣∣∣∣∣∣∣∣12120−6
=−1
2R3 +R4 → R4
2 4 −4 00 3 −3 −30 0 4 20 0 0 3
∣∣∣∣∣∣∣∣12120−6
Buradan
3x4 = −6 =⇒ x4 = −24x3 + 2x4 = 0 =⇒ x3 = 1
3x2 − 3x3 − 3x4 = 12 =⇒ x2 = 32x1 + 4x2 − 4x3 = 12 =⇒ x1 = 2
olarak bulunur.
Örnek 2.2.13x1 + 2x2 − x3 = 3
3x1 + x2 = 42x1 − x2 + x3 = 2
denklem sisteminin varsa çözümünü Gauss eleme yöntemi ile bulalım.
Denklem sistemi için genisletilmis matris 1 2 −13 1 02 −1 1
∣∣∣∣∣∣342
olur. 1 2 −1
3 1 02 −1 1
∣∣∣∣∣∣342
=−3R1 +R2 → R2
−2R1 +R3 → R3
1 2 −10 −5 30 −5 3
∣∣∣∣∣∣3−5−4
=
−R2 +R3 → R3
1 2 −10 −5 30 0 0
∣∣∣∣∣∣3−51
Buradan son satırdaki denklem 0 6= 1 oldugundan çözüm yoktur. Denklem sis-teminin çözümü yoktur.
41

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnek 2.2.14x1 + 2x2 + 4x3 + x4 − x5 = 1
2x1 + 4x2 + 8x3 + 3x4 − 4x5 = 2x1 + 3x2 + 7x3 + 3x5 = −2
denklem sisteminin varsa çözümünü Gauss eleme yöntemi ile bulalım.
Denklem sistemi için genisletilmis matris 1 2 4 1 −12 4 8 3 −41 3 7 0 3
∣∣∣∣∣∣12−2
olur. 1 2 4 1 −1
2 4 8 3 −41 3 7 0 3
∣∣∣∣∣∣12−2
=−2R1 +R2 → R2
−R1 +R3 → R3
1 2 4 1 −10 0 0 1 −20 1 3 −1 4
∣∣∣∣∣∣10−3
=
R2 ↔ R3
1 2 4 1 −10 1 3 −1 40 0 0 1 −2
∣∣∣∣∣∣1−30
Buradan
x4 − 2x5 = 0 =⇒ x4 = 2x5
x2 + 3x3 − x4 + 4x5 = −3 =⇒ x2 = −3− 3x3 − 2x5
x1 + 2x2 + 4x3 + x4 − x5 = 1 =⇒ x1 = 7 + 2x3 + 3x5
elde edilir. x3 = s ve x5 = t alınarak
x1 = 7 + 2s+ 3tx2 = −3− 3s− 2tx3 = sx4 = 2tx5 = t
bulunur. Iki parametreye baglı çözüm kümesi
S = {(7 + 2s+ 3t,−3− 3s− 2t, s, 2t, t) : s, t ∈ R}
elde edilir.
42

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Gauss Eleme Yönteminde Zorluklar (Difficulties in Gauss-EliminationMethod)
i. satırdaki aii pivot elemanı sıfır veya sıfıra yakın bir deger ise sıfıra bölmeisleminden kaçınmak için i. satırı bundan sonra gelen satırlardan pivot ele-manı sıfırdan farklı olacak sekilde satır alınır. Yani satırlar yer degistirilir. Ga-uss elemede hataları indirgemek için ve pivot pozisyonunda sıfır katsayısın-dan kaçınmak için satırlar degistirilir. Bu sürece pivotlama denir. YöntemeKısmi Pivotlama ile Gauss Eleme Yöntemi denir. Bu yöntemde ilgili sütundakitüm elemanların mutlak degerce en büyügü pivot elemanı olarak alınır.
Örnek 2.2.150.0003x1 + 12.34x2 = 12.34
0.4321x1 + x2 = 5.321
Denklem sisteminin gerçek çözümü
x1 = 10, x2 = 1
noktasıdır.
Gauss eleme yöntemi ile çözümü bulmaya çalısalım.[0.0003 12.340.4321 1
∣∣∣∣ 12.345.321
]=
−0.43210.0003R1 +R2 → R2
[0.0003 12.340.0001 −17770
∣∣∣∣ 12.34−17760
]Burada 0.0001 küçük bir sayı oldugu için ihmal edilir.
x2 =−17760
−17770= 0.9994, x1 = 33.33
bulunur.
Simdi pivotlama yapalım. Ilk sütundaki mutlak degerce en büyük eleman a22 =0.4321 elemanıdır. Birinci ve ikinci satır yer degistirilirse,
0.4321x1 + x2 = 5.3210.0003x1 + 12.34x2 = 12.34
denklem sistemini pivotlama ile Gauss eleme ile çözelim.[0.4321 10.0003 12.34
∣∣∣∣ 5.32112.34
]=
−0.00030.4321R1 +R2 → R2
[0.4321 1
0 12.34
∣∣∣∣ 5.32112.34
]olur. Buradan
x2 = 1, x1 = 10
elde edilir. Gerçek çözüme ulasılır.
43

Lineer Denklem Sistemleri (Sytems of Linear Equations)
2.2.2 Gauss-Jordan Eleme Yöntemi (Gauss-Jordan EliminationMethod)
Ax = b lineer denklem sisteminin çözümünü bulmak için Gauss eleme yönte-minde elementar satır islemleri kullanarak sistemin genisletilmis matrisinin[A | b] eselon formu (row echelon form) bulunur.Gauss Jordan eleme yönteminde ise elementar satır islemleri kullanılarakgenisletilmis matrisin indirgenmis eselon formu (reduced row echelon form)bulunur. Gauss Jordan eleme yönteminde pivot elemanlar 1 yapılır. Gausselemede is bu zorunlu degildir.Her iki yöntemde de denklem sistemi ona denk olan baska ve daha basit birdenklem sistemine dönüstürülmüs olur. Son adımda elde edilen basit denk-lem sistemi hemen çözülür. Genisletilmis matrisi indirgenmis matris olanbir denklem sisteminin çözüm kümesini belirlemek çok kolaydır. Diger yan-dan bir denklem sisteminin genisletilmis matrisi indirgenmis forma getirilir-ken her adımda, karsılık gelen denklem sistemi baslangıçtaki denklem siste-mine denk olan bir sistemin genisletilmis matrisi elde edilir. Dolayısıyla, birdenklem sistemi, genisletilmis matrisinin indirgenmis biçimine karsılık gelendenklem sistemine denktir, yani o sistemle aynı çözüm kümesine sahiptir.Böylece bir dogrusal denklem sistemini çözmek için o sistemin genisletilmismatrisinin indirgenmis eselon formunu bulmak önem kazanmaktadır. Ge-nisletilmis matrisin indirgenmis eselon formu bulunduktan sonra, indirgen-mis biçime karsılık gelen lineer denklem sistemi yazılarak sistemin çözümkümesi oradan belirlenir. Denklem sistemini bu yöntemle çözmeye Gauss-Jordan Eleme Yöntemi denir.Genisletilmis matrisi indirgenmis eselon formda olan bir denklem sistemininçözüm kümesinin nasıl belirlendigine bir kaç örnek üzerinden bakalım.
Örnek 2.2.16 Örnegin, denklem sistemi için genisletilmis matrisinin indirgen-mis eselon formu
A =
[1 00 1
∣∣∣∣ 32
]olsun. Bu durumda genisletilmis matrisi A olan denklem sistemi
x1 = 3x2 = 2
dir. Bu denklem sisteminin çözüm kümesi S = {(3, 2)} olur.
Örnek 2.2.17 Örnegin, denklem sistemi için genisletilmis matrisinin indirgen-mis eselon formu
B =
[1 00 0
∣∣∣∣ 30
]
44

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
olsun. Bu durumda genisletilmis matrisi B olan denklem sistemi bir tek denk-lemden ibaret olan x1 = 3 tür. x2 üzerinde hiç bir kosul yoktur. Baska bir de-yisle, x2 herhangi bir degeri alabilir. O halde sistemin sonsuz çözümü vardır veçözüm kümesi
S = {(3, t) : t ∈ R}
olur.
Örnek 2.2.18 Örnegin, denklem sistemi için genisletilmis matrisinin indirgen-mis eselon formu
C =
1 0 −30 1 −60 0 0
∣∣∣∣∣∣−240
olsun. Bu durumda genisletilmis matrisi C olan denklem sistemi
x1 − 3x3 = −2x2 − 6x3 = 4
0 = 0
olur. Bu denklemlerden
x1 = −2 + 3x3, x2 = 4 + 6x3
elde edilir. x3 için herhangi bir t reel sayısı atanırsa,
x1 = −2 + 3t, x2 = 4 + 6t
olur. Böylece (−2 + 3t, 4 + 6t, t) çözümü elde edilir. Sistemin çözüm kümesi
S = {(−2 + 3t, 4 + 6t, t) : t ∈ R}
olur.
Örnek 2.2.19 Örnegin, denklem sistemi için genisletilmis matrisinin indirgen-mis eselon formu
D =
[1 30 0
∣∣∣∣ 01
]olsun. Bu durumda genisletilmis matrisi A olan denklem sistemi
x1 + 3x2 = 00 = 1
dir. Bu denklem sisteminin çözümsüzdür. S = ∅ olur.
45

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnek 2.2.20x1 − 2x2 + 3x3 = 9−x1 + 3x2 = −4
2x1 − 5x2 + 5x3 = 17
denklem sisteminin varsa çözümünü Gauss-Jordan eleme yöntemi ile bulalım.Denklem sistemi için genisletilmis matris 1 −2 3
−1 3 02 −5 5
∣∣∣∣∣∣9−417
olur. 1 −2 3
−1 3 02 −5 5
∣∣∣∣∣∣9−417
=R1 +R2 → R2
−2R1 +R3 → R3
1 −2 30 1 30 −1 −1
∣∣∣∣∣∣95−1
=
R2 +R3 → R3
1 −2 30 1 30 0 2
∣∣∣∣∣∣954
=−3R3 +R1 → R1
−3R3 +R2 → R2
1 −2 00 1 00 0 1
∣∣∣∣∣∣3−12
=
2R2 +R1 → R1
1 0 00 1 00 0 1
∣∣∣∣∣∣1−12
Son matristen, çözüm x1 = 1, x2 = −1, x3 = 2 olarak elde edilir. Son matrisgenisletilmis matrisin indirgenmis eselon formudur.
Örnek 2.2.21x1 − x2 − x3 = 3−2x1 − x2 + x3 = 5
3x1 − 2x2 = 4
denklem sisteminin varsa çözümünü Gauss-Jordan eleme yöntemi ile bulalım.Denklem sistemi için genisletilmis matris 1 −1 −1
2 −1 13 −2 0
∣∣∣∣∣∣354
olur. 1 −1 −1
2 −1 13 −2 0
∣∣∣∣∣∣354
=−2R1 +R2 → R2
−3R1 +R3 → R3
1 −1 −10 1 30 1 3
∣∣∣∣∣∣3−1−5
=
R2 +R3 → R3
1 −1 −10 1 30 0 0
∣∣∣∣∣∣3−1−4
Son matristen 0 6= −4 oldugundan çözüm olmadıgı görülür.
46

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Örnek 2.2.222x1 + x2 − x3 = 0x1 − x2 + x3 = 0x1 + 2x2 − 2x3 = 0
denklem sisteminin varsa çözümünü Gauss-Jordan eleme yöntemi ile bulalım.
Denklem sistemi homojen denklem sistemidir. Sag taraftaki tüm sabitleri sıfırolan sisteme homojen sistem denmektedir. Denklem sistemi için genisletilmismatris 2 1 −1
1 −1 11 2 −2
∣∣∣∣∣∣000
olur. 2 1 −1
1 −1 11 2 −2
∣∣∣∣∣∣000
=R1 ↔ R2
1 −1 12 1 −11 2 −2
∣∣∣∣∣∣000
=
−2R1 +R2 → R2
−R1 +R3 → R3
1 −1 10 3 −30 3 −3
∣∣∣∣∣∣000
=
13R2 → R2
1 −1 10 1 −10 3 −3
∣∣∣∣∣∣000
=−3R2 +R3 → R3
1 −1 10 1 −10 0 0
∣∣∣∣∣∣000
=
R2 +R1 → R1
1 0 00 1 −10 0 0
∣∣∣∣∣∣000
Son matris indirgenmis eselon formundadır. x1 = 0, x2 = x3 olarak elde edilir.Sonsuz çözüm vardır. Çözüm kümesi S = {(0, t, t) : t ∈ R} olarak elde edilir.
Gauss elemede oldugu gibi eger pivot elemanı sıfır veya sıfıra yakın bir sa-yıysa satır degitirme yapılarak yani pivotlama yapılarak problem çözülür.Buna Pivotlu Gauss-Jordan Eleme Yöntemi denir.
47

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Elementar Satır Islemleri ve Determinant
Determinantın özellikleri bölümünde elementar satır islemlerinin determi-nant üzerindeki etkilerini görmüstük. Aynı zamanda üst üçgen matrisin de-terminantının kösegen çarpıları oldugunu görmüstük. Eger elementar satırislemleri ile bir matrisi üst üçgen biçime getirirsek ve gerekli degisimleri de-terminant üzerinden yaparsak verilen matrisin deteminantını üst üçgen mat-risin determinantını kullanarak bulabiliriz.
Verilen A matrisini elemantar satır islemleri kullanarak üst üçgen hale getir.Determinant degisimlerini dikkate alarak üst üçgen matrisin determinantınıbul.
Örnek 2.2.23 A matrisi
A =
1 −1 20 2 14 −2 1
olsun. A matrisinin determinantını elementar satır islemlerini kullanarak bula-lım.
∣∣∣∣∣∣1 −1 20 2 14 −2 1
∣∣∣∣∣∣ =−4R1 +R3 → R3
∣∣∣∣∣∣1 −1 20 2 10 2 −7
∣∣∣∣∣∣ =R2 +R3 → R3
∣∣∣∣∣∣1 −1 20 2 10 0 −8
∣∣∣∣∣∣∣∣∣∣∣∣
1 −1 20 2 10 0 −8
∣∣∣∣∣∣ = 1.2.(−8) = −16
Yani, detA = −16 olarak bulunur.
Örnek 2.2.24 B matrisi
B =
−2 10 21 0 70 −3 5
olsun. B matrisinin determinantını elementar satır islemlerini kullanarak bula-lım.
∣∣∣∣∣∣−2 10 21 0 70 −3 5
∣∣∣∣∣∣ =R1 ↔ R2
−
∣∣∣∣∣∣1 0 7−2 10 20 −3 5
∣∣∣∣∣∣ =2R1 +R2 → R2
−
∣∣∣∣∣∣1 0 70 10 160 −3 5
∣∣∣∣∣∣
48

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
=110R2 → R2
−10
∣∣∣∣∣∣1 0 70 1 8
50 −3 5
∣∣∣∣∣∣ =3R2 +R3 → R3
−10
∣∣∣∣∣∣1 0 70 1 1
100 0 49
5
∣∣∣∣∣∣ = −10.1.1.49
5= −98
Yani, detB = −98 olarak bulunur.
Elementar Satır Islemleri ve Matrisin Tersini (Inverse Matrix) Bulma
A matrisi nxn kare bir matris ise, ve A matrisinin tersi varsa (detA 6= 0)asagıdaki yolu izleyerek A matrisinin tersini bulabiliriz:
(1) In, nxn boyutunda birim matris olmak üzere
[A | In]
bölünmüs matrisini yazarız.
(2) Elementar satır islemlerini uygulayarak A matrisini In matrisine dönüs-türmeye çaslısırız. Eger A matrisinden In matrisi elde edilebiliyorsa, sagtarafta aynı satır islemleri In uygulandıgında yeni olusan B matrisi Amatrisinin tersi olacaktır. Eger A matrisi In matrisine dönüstürelemi-yorsa, A matrisinin tersi yoktur deriz.
Örnek 2.2.25 A matrisi
A =
2 5 41 4 31 −3 −2
olsun. A matrisinin tersini (varsa) elementar satır islemlerini kullanarak bula-lım. 2 5 4
1 4 31 −3 −2
∣∣∣∣∣∣1 0 00 1 00 0 1
=R1 ↔ R2
1 4 32 5 41 −3 −2
∣∣∣∣∣∣0 1 01 0 00 0 1
=
−2R1 +R2 → R2
−R1 +R3 → R3
1 4 30 −3 −20 −7 −5
∣∣∣∣∣∣0 1 01 −2 00 −1 1
=−1
3R2 → R2 1 4 30 1 2
30 −7 −5
∣∣∣∣∣∣0 1 0−1
323 0
0 −1 1
=−4R2 +R1 → R1
7R2 +R3 → R3
1 0 13
0 1 23
0 0 −13
∣∣∣∣∣∣43 −5
3 0−1
323 0
−73
113 1
=
−3R3 → R3
1 0 13
0 1 23
0 0 1
∣∣∣∣∣∣43 −5
3 0−1
323 0
7 −11 −3
49

Lineer Denklem Sistemleri (Sytems of Linear Equations)
=−1
3R3 +R1 → R1
−23R3 +R2 → R2
1 0 00 1 00 0 1
∣∣∣∣∣∣−1 2 1−5 8 27 −11 −3
= [In |A−1]
elde edilir. Bu durumda
A−1 =
−1 2 1−5 8 27 −11 −3
olur. A.A−1 = A−1.A = I3 oldugu gösterilebilir.
Örnek 2.2.26 A matrisi
A =
1 3 4−2 −5 −31 4 9
olsun. A matrisinin tersini (varsa) elementar satır islemlerini kullanarak bula-lım. 1 3 4
−2 −5 −31 4 9
∣∣∣∣∣∣1 0 00 1 00 0 1
=−R1 +R3 → R3
2R1 +R2 → R2
1 3 40 1 50 1 5
∣∣∣∣∣∣1 0 02 1 0−1 0 1
=
−R2 +R3 → R3
1 3 40 1 50 0 0
∣∣∣∣∣∣1 0 02 1 0−3 −1 1
soldaki son satır sıfırlardan olusuyor. Yani sol matris I3 birim matrise dönüse-mez. Bu durumda A matrisinin tersi yoktur. Bunu islemleri yapmadan detA = 0oldugunu göstererekte söyleyebilirdik.
2.2.3 LU Çarpanlarına Ayırma Yöntemi (LU Decomposition Method)
Lineer denklem sistemlerinin çözümünde LU ve Cholesky çarpanlarına ayırmaolarak isimlendirilen matris ayrıstırmaları yapılır.
LU-Ayrısımı (LU Decomposition)
Ax = b denklem sisteminde A katsayılar matrisi üzerinde islemler yapılır. Amatrisi L alt üçgen matris (lower triangular matrix) ve U üst üçgen matris(upper triangular matrix) olarak iki matrisin çarpımı seklinde yazılır.
A = LU
50

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
olsun. Burada L alt üçgen matris, U üst üçgen matristir. Bu durumda lineerdenklem sistemi asagıdaki adımları izleyerek çözülebilir.
Ax = bLUx = bUx = y olsunLy = b çözülerek y bulunur, ileri koyma yöntemi ileUx = y çözülerek x bulunur, geri koyma yöntemi ile
L alt üçgen ve U üst üçgen matrisleri bulmak için
(a) Gauss Eleme (L: kösegeni 1 alınır)
(b) Doolittle Yöntemi (L: kösegeni 1 alınır)
(c) Crout Yöntemi (U : kösegeni 1 alınır)
(a) Gauss Eleme Kullanarak LU-Ayrısımı (LU Decomposition using GaussElimination)
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
matrisi
A = LU
burada
L =
1 0 0 0 · · · 0l21 1 0 0 · · · 0
l31 l32 1 0... 0
......
......
ln−1,1 ln−1,2 ln−1,3 · · · 1 0ln1 ln2 ln3 · · · ln,n−1 1
U =
u11 u12 u13 u14 · · · u1n
0 u22 u23 u24 · · · u2n
0 0 u33 u34 · · · u3n...
......
...0 0 0 · · · un−1,n−1 un−1,n
0 0 0 · · · 0 unn
olarak yazılabiliyorsa, A matrisinin LU çarpanı mevcuttur. Burada L alt üç-gen matris (lower triangular matrix) ve U üst üçgen matris (upper triangularmatrix)tir.
51

Lineer Denklem Sistemleri (Sytems of Linear Equations)
L alt üçgen matrisin bilinmeyen elemanları Gauss eleme yöntemindeki çar-panlar olarak alınır. U üst üçgen matris ise Gauss eleme yönteminde eldeedilen eselon formdur (Eleme islemi pivot elemanı 1 yapılmadan yapılır.)
Örnek 2.2.27
A =
−1 −2 52 6 −43 −2 1
matrisini Gauss eleme yöntemi kullanarak LU çarpanlarına ayıralım. −1 −2 5
2 6 −43 −2 1
=2R1 +R2 → R2
3R1 +R3 → R3
−1 −2 50 2 60 −8 16
=
4R2 +R3 → R3
−1 −2 50 2 60 0 40
Burada Gauss elemedeki çarpanlar
m21 = −2,m31 = −3,m32 = −4
olmaktadır. L alt üçgen matris kösegenleri 1 ve
l21 = −2, l31 = −3, l32 = −4
olan matristir:
L =
1 0 0−2 1 0−3 −4 1
U üst üçgen matris ise elde ettigimiz eselon form olur:
U =
−1 −2 50 2 60 0 40
A = LU oldugu gösterilebilir.
Simdi LU çarpanları kullanarak denklem sistemi çözümüne bakalım.
Örnek 2.2.28−x1 − 2x2 + 5x3 = −262x1 + 6x2 − 4x3 = 443x1 − 2x2 + x3 = −10
52

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
denklem sistemini LU ayrıstırma yöntemi ile çözelim.
Katsayılar matrisi Örnek 2.2.27 de
A =
−1 −2 52 6 −43 −2 1
L =
1 0 0−2 1 0−3 −4 1
, U =
−1 −2 50 2 60 0 40
çarpanlarına ayrılır. Önce
Ly = b
çözülür. 1 0 0−2 1 0−3 −4 1
y1
y2
y3
=
−2644−10
çözülür. Buradan
y1 = −26−2y1 + y2 = 44 =⇒ y2 = −8
−3y1 − 4y2 + y3 = −10 =⇒ y3 = −120
olarak bulunur. Daha sonraUx = y
çözülür. −1 −2 50 2 60 0 40
x1
x2
x3
=
−26−8−120
çözülür. Buradan
−x1 − 2x2 + 5x3 = −26 =⇒ x1 = 12x2 + 6x3 = −8 =⇒ x2 = 5
40x3 = −120 =⇒ x3 = −3
olarak bulunur. Ax = b Denklem sisteminin çözümü
x1 = 1, x2 = 5, x3 = −3
olarak bulunmus olur.
53

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(b) Doolittle Yöntemi ile LU-Ayrısımı (LU Decomposition with Doolittlemethod)
A = LU ayrıstırmasında L alt üçgen matrisinin kösegen elemanları 1 olarakalınır. Matris çarpımından ve esitliginden L ve U matrislerinin elemanlarıbulunur. Doolittle LU-ayrısımında
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
matrisi
A = LU
burada
L =
1 0 0 0 · · · 0l21 1 0 0 · · · 0
l31 l32 1 0... 0
......
......
ln−1,1 ln−1,2 ln−1,3 · · · 1 0ln1 ln2 ln3 · · · ln,n−1 1
U =
u11 u12 u13 u14 · · · u1n
0 u22 u23 u24 · · · u2n
0 0 u33 u34 · · · u3n...
......
...0 0 0 · · · un−1,n−1 un−1,n
0 0 0 · · · 0 unn
olarak yazılabiliyorsa, A matrisinin LU çarpanı mevcuttur. Burada L alt üç-gen matris (lower triangular matrix) ve U üst üçgen matris (upper triangularmatrix)tir. Doolittle LU ayrısımının adımları:
(i) U üst üçgen matrisinin ilk satırını hesapla: u1j = a1j , 1 ≤ j ≤ n
(ii) L üst üçgen matrisinin kösegen elemanlarını 1 olarak belirle.
(iii) L matrisinin ilk sütunundaki elemanların hesaplanması (l11 hariç): li1 =ai1u11
(iv) Satır satır kalan elemanların hesaplanması, i satır ve j sütun sayısı ol-mak üzere öncelikle U matrisinin elemanları hesaplanır. i = 1, 2, · · · , n, j =
54

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
1, 2, · · · , n olmak üzere
uij = aij −i−1∑k=1
likukj
i = 2, 3, · · · , n, j = 1, 2, · · · , i− 1 olmak üzere
lij =aij −
∑j−1k=1 likukjujj
Örnek 2.2.29
A =
1 4 54 20 325 32 64
matrisinin LU ayrısımını Doolittle yöntemi ile bulalım. 1 4 5
4 20 325 32 64
=
1 0 0l21 1 0l31 l32 1
u11 u12 u13
0 u22 u23
0 0 u33
1 4 5
4 20 325 32 64
=
u11 u12 u13
l21u11 l21u12 + u22 l21u13 + u23
l31u11 l31u12 + l32u22 l31u13 + l32u23 + u33
esitligi elde edilir. Matris esitliginden tüm elemanlar karsılıklı esit olmalıdır. Bunedenle asagıdaki esitlikler elde edilir:
1. satır:u11 = 1, u12 = 4, u13 = 5
2. satır:l21u11 = 4 =⇒ l21 = 4
l21u12 + u22 = 20 =⇒ u22 = 4l21u13 + u23 = 32 =⇒ u23 = 12
3. satır:l31u11 = 5 =⇒ l31 = 5
l31u12 + l32u22 = 32 =⇒ l32 = 3l31u13 + l32u23 + u33 = 64 =⇒ u33 = 3
olarak bulunur. Yani,
L =
1 0 04 1 05 3 1
, U =
1 4 50 4 120 0 3
olarak elde edilir. A = LU esitligi matris çarpımı yaparak gösterilebilir.
55

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(b) Crout Yöntemi ile LU-Ayrısımı (LU Decomposition with Crout met-hod)
A = LU ayrıstırmasında U üst üçgen matrisinin kösegen elemanları 1 olarakalınır. Matris çarpımından ve esitliginden L ve U matrislerinin elemanlarıbulunur.
Örnek 2.2.30
A =
1 2 32 5 23 1 5
matrisinin LU ayrısımını Crout yöntemi ile bulalım. 1 2 3
2 5 23 1 5
=
l11 0 0l21 l22 0l31 l32 l33
1 u12 u13
0 1 u23
0 0 1
1 2 3
2 5 23 1 5
=
l11 l11u12 l11u13
l21 l21u12 + l22 l21u13 + l22u23
l31 l31u12 + l32 l31u13 + l32u23 + l33
esitligi elde edilir. Matris esitliginden tüm elemanlar karsılıklı esit olmalıdır. Bunedenle asagıdaki esitlikler elde edilir:
1. satır:l11 = 1, u12 = 2, u13 = 3
2. satır:l21 = 2
l21u12 + l22 = 5 =⇒ l22 = 1l21u13 + l22u23 = 2 =⇒ u23 = −4
3. satır:l31 = 3
l31u12 + l32 = 1 =⇒ l32 = −5l31u13 + l32u23 + l33 = 5 =⇒ l33 = −24
olarak bulunur. Yani,
L =
1 0 02 1 03 5 −24
, U =
1 2 30 1 −40 0 1
olarak elde edilir. A = LU esitligi matris çarpımı yaparak gösterilebilir.
56

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Örnek 2.2.31x1 + 2x2 + 3x3 = 142x1 + 5x2 + 2x3 = 183x1 + x2 + 5x3 = 20
denklem sistemini LU ayrıstırma yöntemi ile çözelim.
Katsayılar matrisi Örnek 2.2.30 de
A =
1 2 32 5 23 1 5
L =
1 0 02 1 03 5 −24
, U =
1 2 30 1 −40 0 1
çarpanlarına ayrılır. Önce
Ly = b
çözülür. 1 0 02 1 03 5 −24
y1
y2
y3
=
141820
çözülür. Buradan
y1 = 142y1 + y2 = 18 =⇒ y2 = −10
3y1 − 5y2 − 24y3 = 20 =⇒ y3 = 3
olarak bulunur. Daha sonraUx = y
çözülür. 1 2 30 1 −40 0 1
x1
x2
x3
=
14−10
3
çözülür. Buradan
x1 + 2x2 + 3x3 = 14 =⇒ x1 = 1x2 − 4x3 = −10 =⇒ x2 = 2
x3 = 3
olarak bulunur. Ax = b Denklem sisteminin çözümü
x1 = 1, x2 = 2, x3 = 3
olarak bulunmus olur.
57

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Genel olarak Crout LU ayrısımında
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
matrisi
A = LU
burada
L =
l11 0 0 0 · · · 0l21 l22 0 0 · · · 0
l31 l32 l33 0... 0
......
......
ln−1,1 ln−1,2 ln−1,3 · · · ln−1,n−1 0ln1 ln2 ln3 · · · ln,n−1 1
U =
1 u12 u13 u14 · · · u1n
0 1 u23 u24 · · · u2n
0 0 1 u34 · · · u3n...
......
...0 0 0 · · · 1 un−1,n
0 0 0 · · · 0 1
olmak üzere A = LU esitligini saglayan L ve U matrisleri vardır. Burada L altüçgen matris (lower triangular matrix) ve U üst üçgen matris (upper triangu-lar matrix)tir. Üst üçgen matrisin kösegen elemanları 1 olarak alınır.
Crout LU ayrısımının adımları:
(i) L alt üçgen matrisinin ilk sütununu hesapla: li1 = ai1
(ii) U üst üçgen matrisinin kösegen elemanlarını 1 olarak belirle.
(iii) U matrisinin ilk satırındaki elemanların hesaplanması (u11 hariç): u1j =a1jl11
(iv) Satır satır kalan elemanların hesaplanması, i satır ve j sütun sayısı ol-mak üzere öncelikle L matrisinin elemanları hesaplanır. i = 1, 2, · · · , n, j =1, 2, · · · , n olmak üzere
lij = aij −j−1∑k=1
likukj
58

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
j = (i+ 1), (i+ 2), · · · , n olmak üzere
uij =aij −
∑i−1k=1 likukjlii
Pivotlama ile LU Ayrısımı (LU Decomposition with Pivoting)Ax = b lineer denklem sisteminin çözümünde Gauss eleme yönteminde pi-votlama (satır degisimi) kullanılıyorsa L ve U matrisleri dogrudan katsayılarmatrisiyle elde edilemez. Pivotlamaya baglı olarak satırlar farklı sırada olusa-caktır. Bu durumda permutasyon matrisleri kullanılır. Yani,
PA = LU
yapılır. Permütasyon matrisi birim matrisin satırları yer degistirilerek eldeedilen matristir. Örnegin,
I =
1 0 00 1 00 0 1
, P =
0 0 10 1 01 0 0
Eger bu P matrisi alınarak PA çarpımı yapılıyorsa A matrisinin 1. ve 3. satır-ları yer degistirmis olur.Cholesky Ayrıstırma Yöntemi (Cholesky Decomposition Method)Cholesky ayrıstırma sadece pozitif tanımlı matrisler için tanımlıdır.Pozitif Tanımlı Matrisler (Positive Definite Matrices)
Tanım 2.2.5 A matrisi simetrik (AT = A) ve tüm x 6= 0 vektörü için
xTAx > 0
ise A matrisi pozitif tanımlı (positive definite) matristir.
Örnek 2.2.32
A =
2 −1 0−1 2 −10 −1 2
matrisinin pozitif tanımlı oldugunu gösterelim.AT = A oldugundan A matrisi simetriktir.
xTAx = [x1 x2 x3]
2 −1 0−1 2 −10 −1 2
x1
x2
x3
= [x1 x2 x3]
2x1 − x2
−x1 + 2x2 − x3
−x2 + 2x3
= 2x2
1 − 2x1x2 + 2x22 − 2x2x3 + 2x2
3
= x21 + (x2
1 − 2x1x2 + x22) + (x2
2 − 2x2x3 + x23) + x2
3
= x21 + (x1 − x2)2 + (x2 − x3)2 + x2
3 > 0, x1, x2, x3 6= 0
59

Lineer Denklem Sistemleri (Sytems of Linear Equations)
A matrisinin pozitif tanımlı olması için tüm asal bas matrislerinin determi-nantı pozitif olmaldır.
a11 > 0,
∣∣∣∣ a11 a12
a21 a22
∣∣∣∣ > 0,
∣∣∣∣∣∣a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣ > 0, · · ·
Pozitif tanımlılıgın baska bir kriteri özdegerlerle ilgilidir.
Ax = λx esitligini saglayan λ ∈ R sabitine özdeger (eigenvalue), x vektörüneözvektör (eigenvector) denir.
Özdegerler
Ax = λx =⇒ Ax− λx = 0 =⇒ (A− λI)x = 0 =⇒ det(A− λI) = 0
denkleminin çözümleridir.
A pozitif tanımlı matristir ancak ve ancak λi > 0, i = 1, 2, · · · , n.
A pozitif yarı tanımlı matristir ancak ve ancak λi ≥ 0, i = 1, 2, · · · , n.
Örnek 2.2.33
A =
2 −1 0−1 2 −10 −1 2
matrisinin pozitif tanımlı oldugunu asal bas matrislerinin determinantlarınabakarak gösterelim.
detA1 = det[2] = 2 > 0
detA2 =
∣∣∣∣ 2 −1−1 2
∣∣∣∣ = 3 > 0
detA3 =
∣∣∣∣∣∣2 −1 0−1 2 −10 −1 2
∣∣∣∣∣∣ = 4 > 0
oldugundan A matrisi pozitif tanımlıdır.
Cholesky yönteminde lineer denklem sistemi Ax = b katsayılar matrisi A po-zitif tanımlıdır. A matrisi A = LLT seklinde çarpanlara ayrılır. Yani burada Uüst üçgen matris U = LT olmaktadır.
Örnek 2.2.34 Verilen denklem sistemini Cholesky ayrıstırma yöntemiyle çö-zünüz.
4x1 + 2x2 + 14x3 = 142x1 + 17x2 − 5x3 = −10114x1 − 5x2 + 83x3 = 155
60

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Katsayılar matrisi
A =
4 2 142 17 −514 −5 83
simetrik ve pozitif tanımlıdır. A matrisinin Cholesky ayrısımı A = LLT olur. 4 2 14
2 17 −514 −5 83
=
l11 0 0l21 l22 0l31 l32 l33
l11 l21 l31
0 l22 l32
0 0 l33
4 2 14
2 17 −514 −5 83
=
l211 l11l21 l11l31
l11l21 l221 + l222 l21l31 + l22l32
l11l31 l31l21 + l32l22 l231 + l232 + l233
esitligi elde edilir. Matris esitliginden tüm elemanlar karsılıklı esit olmalıdır. Bunedenle asagıdaki esitlikler elde edilir:
l11 =√a11 = 2, l21 =
a21
l11= 1, l31 =
a31
l11= 7
Karekök isleminde pozitif olanın alınmasının sebebi 2. satırdaki estiliklerindesaglanması gerektigi içindir.
l22 =√a22 − l221 =
√16 =⇒ l22 = 4
l32 = 1l22
(a32 − l31l21) = 14(−12) =⇒ l32 = −3
l33 =√a33 − l231 − l232 =
√25 =⇒ l33 = 5
olarak bulunur. Yani,
A = LLT =
2 0 01 4 07 −3 5
2 1 70 4 −30 0 5
elde edilir. Ilk olarak Ly = b denklemi çözülüp, y bilinmeyenleri bulunur. 2 0 0
1 4 07 −3 5
y1
y2
y3
=
14−101155
çözülür. Buradan
2y1 = 14 =⇒ y1 = 7y1 + 4y2 = −101 =⇒ y2 = −27
7y1 − 3y2 + 5y3 = 155 =⇒ y3 = 5
61

Lineer Denklem Sistemleri (Sytems of Linear Equations)
olarak bulunur. Daha sonraLTx = y
çözülür. 2 1 70 4 −30 0 5
x1
x2
x3
=
7−27
5
çözülür. Buradan
2x1 + x2 + 7x3 = 7 =⇒ x1 = 34x2 − 3x3 = −27 =⇒ x2 = −6
5x3 = 5 =⇒ x3 = 1
olarak bulunur. Ax = b denklem sisteminin çözümü
x1 = 3, x2 = −6, x3 = 1
olarak bulunmus olur.
Genel olarak Cholesky yönteminde k = 1, 2, · · · , n, i = 1, 2, · · · , k−1 olmak üzere
lki =1
lii
aki − i−1∑j=1
lijlkj
,
lkk =
√√√√akk −k−1∑j=1
l2kj
denklemleri kullanılarak A = LLT esitligini saglayan L matrisinin elemanlarıbulunur.
LU ayrısımı matrislerin determinantını bulmakta da kullanılabilir.
A = LU
biçiminde çarpanlarına ayrılsın. Buradan
detA = detLdetU
olur.
(a) Doolittle yönteminde detA = detLdetU = u11u22 · · ·unn.
(b) Crout yönteminde detA = detLdetU = l11l22 · · · lnn.
(c) Cholesky ayrıstırma yönteminde (A pozitif tanımlı) detA = detLdetLT =l211l
222 · · · l2nn.
62

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
olarak hesaplanabilir.
Örnek 2.2.35 Örnegin,
A =
−1 −2 52 6 −43 −2 1
matrisinin Doolittle yöntemiyle LU-Ayrısımı
L =
1 0 0−2 1 0−3 −4 1
, U =
−1 −2 50 2 60 0 40
olur. Buradan
detA = detLdetU = (−1).2.40 = −80
olarak bulunur.
2.2.4 Lineer Denklem Sistemleri için Iteratif Yöntemler (IterativeMethods for Linear Systems of Equations)
Çok büyük katsayılar matrisi olan lineer denklem sistemlerinin eliminasyon(direk yöntemler) yöntemleri ile çözümü çogu zaman ekonomik olmaz. Bugibi durumlarda iteratif yöntemler seçilir. Küçük boyutlu (az bilinmeyenli) li-neer denklem sistemleri için iteratif yöntemler çok nadir kullanılır. Bu iteratifyöntemler yerine Gauss eleme gibi direk yöntemler tercih edilir. Ancak bo-yutu büyük olan denklem sistemleri için durum çok farklıdır. Gauss elemehem çok veri depolaması hemde çok islem gerektirmesi nedeniyle tercih edil-mez. Bu tür sistemler özellikle devre analizinde (circuit analysis), sınır degerproblemlerinin (boundary value problem) ve kısmi diferansiyel denklemlerin(partial differential equations) sayısal çözümlerinde karsımıza gelmektedir.Bu tür yöntemlerin amacı
Ax = b
lineer denklem sistemlerinin çözümü için x(0) baslangıç iterasyonu ile basla-yıp {x(n)}∞n=0 dizisi olusturmaktır. Bu dizilerin olusturulmasında
x = Tx+ c
seklinde bir denklem kullanılır. Dizinin elemanlarının denklem sistemininçözümüne yaklasması beklenir.Ax = b lineer denklem sistemini çözmek için x = Tx+c biçimindeki denklemlerkullaınılır. x(0) baslangıç vektörü olmak üzere
x(k) = Tx(k−1) + c, k = 1, 2, 3, · · ·
dizisi hesaplanır. Bunun için iki yöntem vardır:
63

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(a) Jacobi Iterasyon Yöntemi (Jacobi Iteration Method)
(b) Gauss-Seidel Iterasyon Yöntemi (Gauss-Seidel Iteration Method)
Jacobi Iterasyon Yöntemi (Jacobi Iteration Method )
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
......
...an1x1 + an2x2 + · · ·+ annxn = bn
lineer denklem sisteminde 1. denklemden x1, 2. denklemden x2 ve son olarakn. denklemden xn çözülürse
x1 = − 1a11
(a12x2 + a13x3 + · · ·+ a1nxn) + b1a11
x2 = − 1a22
(a21x1 + a23x3 + · · ·+ a2nxn) + b2a22
......
xn = − 1ann
(an1x1 + an2x2 + · · ·+ an,n−1xn−1) + bnann
olarak bulunur. Matris formunda
T =
0 −a12
a11· · · −a1n
a11−a21a22
0 · · · −a2na22
......
− an1ann
− an2ann
· · · 0
, b =
b1a11b2a22...bnann
olmak üzere
x = Tx+ b
seklinde yazılabilir. Bu yöntemde çözümün bulunabilmesi için baslangıçtabir vektörün seçilmesi gerekir. Baslangıç vektörü x(0) seçilirse, birinci iteras-yon sonunda
x(1) = Tx(0) + b
tahmini elde edilir. Bu yeni vektör kullanılarak ikinci tahmin
x(2) = Tx(1) + b
kullanılarak bulunur. Bu sekilde iterasyona devam edilerek k. iterasyon so-nunda
x(k) = Tx(k−1) + b
elde edilir. Bu iterasyon daha açık olarak k ≥ 1 ve i = 1, 2, · · · , n için
x(k)i =
∑nj=1,j 6=i
(aijx
k−1j
)aii
+biaii
64

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
olur. Jacobi iterasyon yönteminde x(k)i degerlerini elde etmek için x
(k−1)i de-
gerlerinden yararlanırız.Genel olarak bir
A =
a11 a12 · · · a1j · · · a1n
a21 a22 · · · a2j · · · a2n...
......
...ai1 ai2 · · · aij · · · ain...
......
...an1 an2 · · · anj · · · ann
matrisini asagıdaki gibi üçgensel matrislerle ifade edebiliriz. Burada L kö-segen elemanları sıfır olan alt üçgensel matris (lower triangular), D kösegenmatris (diagonal), U ise kösegen elemanları sıfır olan üst üçgensel matris (up-per triangular)tir:
A = L+D + U
L =
0 0 · · · 0 · · · 0a21 0 · · · 0 · · · 0...
......
...an1 an2 · · · an−1,n−1 0
D =
a11 0 · · · 0 · · · 00 a22 · · · 0 · · · 0...
......
...0 0 · · · 0 ann
U =
0 a12 · · · a1j · · · a1n
0 0 · · · a2j · · · a2n...
......
...0 0 · · · 0 0
Örnek 2.2.36
A =
10 −1 2 0−1 11 −1 32 −1 10 −10 3 −1 8
matrisini L+D+U seklinde yazalım.
10 −1 2 0−1 11 −1 32 −1 10 −10 3 −1 8
=
0 0 0 0−1 0 0 02 −1 0 00 3 −1 0
+
10 0 0 00 11 0 00 0 10 00 0 0 8
+
0 −1 2 00 0 −1 30 0 0 −10 0 0 0
= L+D + U
65

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Tanım 2.2.6Ax = b
lineer denklem sisteminde
(L+D+U)x = b =⇒ Dx = b−(L+U)x =⇒ x(k+1) = −D−1(L+U)x(k)+D−1b, k = 0, 1, 2, · · ·
iterasyonuna Jacobi iterasyonu denir. Buna göre
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
......
...an1x1 + an2x2 + · · ·+ annxn = bn
lineer denklem sisteminin Jacobi iterasyonu ile çözümünü verilen x(0) =(x
(0)1 , x
(0)2 , · · · , x(0)
n
)baslangıç noktası ve k = 0, 1, 2, · · · için
x(k+1)1 = − 1
a11
(a12x
(k)2 + a13x
(k)3 + · · ·+ a1nx
(k)n
)+ b1
a11
x(k+1)2 = − 1
a22
(a21x
(k)1 + a23x
(k)3 + · · ·+ a2nx
(k)n
)+ b2
a22...
...
x(k+1)n = − 1
ann
(an1x
(k)1 + an2x
(k)2 + · · ·+ an,n−1x
(k)n−1
)+ bn
ann
iteratif olarak hesaplanmaktadır. Burada
x = −D−1(L+ U)x+D−1b
oldugundan x = Tx + c esitliginde T = −D−1(L + U) ve c = D−1b olur. YaniJacobi iterasyonları
x(k) = Tx(k−1) + c
olarak hesaplanır.
Durdurma kriteri:
ε iterasyonları durdurmak için verilen hata sınırı olmak üzere
||x(k+1) − x(k)|| < ε
veya||x(k+1) − x(k)||||x(k+1)||
< ε
oluncaya kadar iterasyonlara devam edilir.
66

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Örnek 2.2.378x1 − x2 + 3x3 = 1x1 − 5x2 − x3 = 03x1 + x2 + 6x3 = 2
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0) alarak Jacobi ite-rasyonu ile ilk iki noktayı bulunuz.
8x1 = x2 − 3x3 + 15x2 = x1 − x3
6x3 = 2− 3x1 − x2
olur. Buradanx1 = 1
8x2 − 38x3 + 1
8x2 = 1
5x1 − 15x3
x3 = −12x1 − 1
6x2 + 13
Matris formunda x1
x2
x3
=
0 18 −3
815 0 −1
5−1
2 −16 0
x1
x2
x3
+
18013
x
(k+1)1 = 1
8x(k)2 − 3
8x(k)3 + 1
8
x(k+1)2 = 1
5x(k)1 − 1
5x(k)3
x(k+1)3 = −1
2x(k)1 − 1
6x(k)2 + 1
3
Ilk iterasyonu bulmak için denklemlerde k = 0 yazılır.
x(1)1 = 1
8x(0)2 − 3
8x(0)3 + 1
8
x(1)2 = 1
5x(0)1 − 1
5x(0)3
x(1)3 = −1
2x(0)1 − 1
6x(0)2 + 1
3
denklemlerindenx
(1)1 =
1
8, x
(1)2 = 0, x
(1)3 =
1
3
elde edilir. Ikinci iterasyon için denklemlerde k = 1 yazılır ve x(1) degerleri kul-lanılır.
x(2)1 = 1
8x(1)2 − 3
8x(1)3 + 1
8
x(2)2 = 1
5x(1)1 − 1
5x(1)3
x(2)3 = −1
2x(1)1 − 1
6x(1)2 + 1
3
denklemlerindenx
(2)1 = 0, x
(2)2 = − 1
24, x
(2)3 =
1
6
olarak bulunur.
67

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnek 2.2.384x1 − x2 + x3 = 74x1 − 8x2 + x3 = −21−2x1 + x2 + 5x3 = 15
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0), ε = 0.0001 alarakJacobi iterasyonu çözünüz.
x(k+1)1 = 1
4x(k)2 − 1
4x(k)3 + 7
4
x(k+1)2 = 1
2x(k)1 + 1
8x(k)3 + 21
8
x(k+1)3 = 2
5x(k)1 − 1
5x(k)2 + 3
iterasyon x1 x2 x3 ε
0 0 0 0 0.0001
1 1.75 2.625 3 0.0001
2 1.65625 3.875 3.175 0.0001
3 1.925 3.85 2.8875 0.0001
4 1.990625 3.948438 3 0.0001
5 1.987109 3.995313 3.006563 0.0001
6 1.997188 3.994375 2.995781 0.0001
7 1.999648 3.998066 3 0.0001
8 1.999517 3.999824 3.000246 0.0001
9 1.999895 3.999789 2.999842 0.0001
10 1.999987 3.999927 3 0.0001
11 1.999982 3.999993 3.000009 0.0001
Buradan ε = 0.0001 için çözüm
x1 = 1.999982, x2 = 3.999993, x3 = 3.000009
11. iterasyonda olarak bulunur. Gerçek çözüm x∗ = [2 , 4, 3] vektörüdür.
Gauss-Seidel Iterasyon Yöntemi (Gauss-Seidel Iteration Method )
Gauss-Seidel iterasyonunda Jacobi iterasyon yönteminden farklı olarak, her-hangi bir asamada elde edilen bilinmeyen degerin, bu kademeyi takip edenkademede hemen kullanılması ile çözüme yaklasılması söz konusudur. Bas-langıçta x2, x3, · · · , xn degerleri için uygun bir veri grubu girilir. 1. denkleminsag tarafına bu degerler yerlestirilerek x1 için x
(1)1 seklinde yaklasık bir çözüm
elde edilir. Sonra 2. denklemde bu x(1)1 , x3, · · · , xn degerleri yerlerine yazılarak
x2 bilinmeyeni için x(1)2 seklinde yaklasık bir çözüm elde edilir. Benzer sekilde
68

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
3. denklemde bu x(1)1 , x
(1)2 , x4, · · · , xn degerleri yerlerine yazılarak iterasyon is-
lemlerine devam edilir.
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
......
...an1x1 + an2x2 + · · ·+ annxn = bn
lineer denklem sistemi için
x(1)1 = − 1
a11
(a12x
(0)2 + a13x
(0)3 + · · ·+ a1nx
(0)n
)+ b1
a11
x(1)2 = − 1
a22
(a21x
(1)1 + a23x
(0)3 + · · ·+ a2nx
(0)n
)+ b2
a22...
...
x(1)n = − 1
ann
(an1x
(1)1 + an2x
(1)2 + · · ·+ an,n−1x
(1)n−1
)+ bn
ann
elde edilir. Genel olarak (k + 1). iterasyon sonucunda
x(k+1)i =
biaii−
i−1∑j=1
aijaiix
(k+1)j −
n∑j=i+1
aijaiix
(k)j
olur.
Tanım 2.2.7Ax = b
lineer denklem sisteminde
(L+D+U)x = b =⇒ Dx = b−(L+U)x =⇒ x(k+1) = −D−1(b− Lx(k+1) − Ux(k)
), k = 0, 1, 2, · · ·
iterasyonuna Gauss-Seidel iterasyonu denir. Buna göre
a11x1 + a12x2 + · · ·+ a1nxn = b1a21x1 + a22x2 + · · ·+ a2nxn = b2
......
...an1x1 + an2x2 + · · ·+ annxn = bn
lineer denklem sisteminin Gauss-Seidel iterasyonu ile çözümünü verilen x(0) =(x
(0)1 , x
(0)2 , · · · , x(0)
n
)baslangıç noktası ve k = 0, 1, 2, · · · için
x(k+1)1 = − 1
a11
(a12x
(k)2 + a13x
(k)3 + · · ·+ a1nx
(k)n
)+ b1
a11
x(k+1)2 = − 1
a22
(a21x
(k+1)1 + a23x
(k)3 + · · ·+ a2nx
(k)n
)+ b2
a22...
...
x(k+1)n = − 1
ann
(an1x
(k+1)1 + an2x
(k+1)2 + · · ·+ an,n−1x
(k+1)n−1
)+ bn
ann
69

Lineer Denklem Sistemleri (Sytems of Linear Equations)
iteratif olarak hesaplanmaktadır. Burada A = D + L + U seklinde yazılırsa(D + L + U)x = b =⇒ (D + L)x = b − Ux =⇒ x = −(D + L)−1Ux + (D + L)−1bolur. Yani,
x = −(D + L)−1Ux+ (D + L)−1b
oldugundan x = Tx+ c esitliginde T = −(D+L)−1U ve c = (D+L)−1b olur. YaniGauss-Seidel iterasyonları
x(k) = Tx(k−1) + c
olarak hesaplanır.
Örnek 2.2.396x1 − 2x2 + x3 = 11−2x1 + 7x2 + 2x3 = 5x1 + 2x2 − 5x3 = −1
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0) alarak Gauss-Seideliterasyonu ile ilk 6 noktayı bulunuz.
6x1 = 2x2 − x3 + 117x2 = 2x1 − 2x3 + 5−5x3 = −x1 − 2x2 − 1
olur. Buradanx1 = 1
3x2 − 16x3 + 11
6x2 = 2
7x1 − 27x3 + 5
7x3 = 1
5x1 + 25x2 + 1
5
x(k+1)1 = 1
3x(k)2 − 1
6x(k)3 + 11
6
x(k+1)2 = 2
7x(k+1)1 − 2
7x(k)3 + 5
7
x(k+1)3 = 1
5x(k+1)1 + 2
5x(k+1)2 + 1
5
Ilk iterasyonu bulmak için denklemlerde k = 0 yazılır.
x(1)1 = 1
3x(0)2 − 1
6x(0)3 + 11
6
x(1)2 = 2
7x(1)1 − 2
7x(0)3 + 5
7
x(1)3 = 1
5x(1)1 + 2
5x(1)2 + 1
5
denklemlerinden
x(1)1 =
11
6≈ 1.8333, x
(1)2 = 1.2381, x
(1)3 = 1.0619
elde edilir. Ikinci iterasyon için denklemlerde k = 1 yazılır ve x(1) degerleri kul-lanılır.
x(2)1 = 1
3x(1)2 − 1
6x(1)3 + 11
6
x(2)2 = 2
7x(2)1 − 2
7x(1)3 + 5
7
x(2)3 = 1
5x(2)1 + 2
5x(2)2 + 1
5
70

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
denklemlerinden
x(2)1 = 2.0691, x
(2)2 = 1.0021, x
(2)3 = 1.0147
olarak bulunur. Iterasyonlara devam edilirse
iterasyon x1 x2 x3
0 0 0 0
1 1.8333 1.2381 1.0619
2 2.0691 1.0021 1.0417
3 1.9983 0.9953 0.9978
4 1.9988 1.0003 0.9999
5 2.0001 1.0001 1.0001
6 2.0000 1.0000 1.0000
degerleri elde edilir. Gerçek çözüm
x∗ = (2, 1, 1)
noktasıdır. Yakınsama olmustur.
Iteratif Yöntemlerin Yakınsaması (Convergence for Iteration Methods)
Tanım 2.2.8 (Norm)
(i) ||A|| ≥ 0, (A 6= 0), ||A|| = 0, A = 0
(ii) ||αA|| = |α|||A||, α ∈ R
(iii) ||Ax|| ≤ ||A||||x||
(iv) ||A+B|| ≤ ||A||+ ||B||
özelliklerini saglayan bir reel sayıdır.
Vektör veya matris normu, vektör veya matrislerinin büyüklüklerinin muka-yese edilmesine imkan verir. Esas olarak norm, vektör veya matrislerin bü-yüklügünü gösteren bir sayıdır. En çok kullanılan norm, Öklid norm(Euclidnorm)/2-normudur.
Vektör Normları
n elemandan olusan bir v vektörü için
(i) Sonsuz norm:||v||∞ = max
1≤i≤n|vi|
mutlak degerce en büyük vi elamanına esittir.
71

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(ii) 1-norm:
||v||1 =
n∑i=1
|vi|
vektörün elemanlarının mutlak degerlerinin toplamına esittir.
(iii) Öklid norm/2-norm:
||v||2 =
(n∑i=1
|v2i |
)2
vektörün elemanlarının karelerinin toplamının kareköküne esittir.
Matris Normları
nxn boyutunda bir A matrisi için
(i) Sonsuz norm:
||A||∞ = max1≤i≤n
n∑j=1
|aij |
Matrisin her bir satırındaki elemanların mutlak degerleri toplamı. Enbüyük toplam deger matrisin sonsuz normu olur.
(ii) 1-norm:
||A||1 = max1≤j≤n
n∑i=1
|aij |
Matrisin her bir sütunundaki elemanların mutlak degerleri toplamı. Enbüyük toplam deger matrisin 1-normu olur.
(iii) Öklid norm/2-norm:
||A||2 =
n∑i=1
n∑j=1
a2ij
12
Örnek 2.2.40
A =
2 −2 1−1 3 −12 −4 2
matrisi için ||A||∞, ||A||1, ||A||2 normlarını bulunuz.
Sonsuz norm: Matrisin her bir satırındaki elemanların mutlak degerlerinin top-lamının en büyügü.
||A||∞ = max1≤i≤n∑n
j=1 |aij |= max{|2|+ | − 2|+ |1|, | − 1|+ |3|+ | − 1|, |2|+ | − 4|+ |2|}= max{5, 5, 8} = 8
72

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
1-norm: Matrisin her bir sütunundaki elemanların mutlak degerlerinin toplamı-nın en büyügü.
||A||1 = max1≤j≤n∑n
i=1 |aij |= max{|2|+ | − 1|+ |2|, | − 2|+ |3|+ | − 4|, |1|+ | − 1|+ |2|}= max{5, 9, 4} = 9
Öklid norm/2-norm:
||A||2 =(∑n
i=1
∑nj=1 a
2ij
) 12
=(22 + (−2)2 + 12 + (−1)2 + 32 + (−1)2 + 22 + (−4)2 + 22
)1/2=√
41 ≈ 6.40
Jacobi ve Gauss-Seidel iterasyonları genel olarak
x = Tx+ c
formundadır. Her iterasyon yönteminde yakınsama problemi vardır. Jacobive Gauss-Seidel iterasyonunda T matrisinin özdegerlerinin 1’den küçük ol-ması halinde çözüme yakınsama olur. Bunun olması için T matrisinin matrisnormlarının 1’den küçük olması gerekmektedir. Yani
||T ||∞, ||T ||1, ||T ||2 < 1
olmalıdır.
Tanım 2.2.9 (Spektral yarıçap/Spectral Radiance)nxn boyutunda A matrisinin spektral yarıçapı ρ(A)
ρ(A) = max |λ|
burada λ sayısı A matrisinin özdegeri seklinde tanımlanır.
Teorem 2.2.2 nxn boyutunda A matrisi olsun.(i) ||A||2 =
√ρ(ATA)
(ii) ρ(A) ≤ ||A||, burada ||.|| herhangi bir matris normudur.
Ispat: λ: A matrisinin özdegeri, x, A matrisinin özvektörü ||x|| = 1. Yani, Ax =λx
|λ| = |λ|||x|| = ||λx|| = ||Ax|| ≤ ||A||||x|| = ||A||=⇒ ρ(A) = max |λ| ≤ ||A||
AT = A ise ||A||2 = ρ(A) olur.
x(k) = Tx(k−1) + c, k = 1, 2, · · ·iterasyonları olsun. x(0) baslangıç vektörü olsun.
73

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Teorem 2.2.3 x(0) ∈ Rn için {x(k)}∞k=0 dizisi
x(k) = Tx(k−1) + c, k = 1, 2, · · ·
ile tanımlansın. Bu dizi x = Tx+ c tek çözümüne yakınsar ancak ve ancak
ρ(T ) < 1
Teorem 2.2.4 ||.|| herhangi bir norm olmak üzere ||T || < 1 ve {x(k)}∞k=0 dizisi
x(k) = Tx(k−1) + c, k = 1, 2, · · ·
ile tanımlansın. Bu dizi x(0) ∈ Rn baslangç vektörü için x∗ ∈ Rn yakınsar ve
||x∗ − x(k)|| ≤ ||T k||||x(0) − x||
||x∗ − x(k)|| ≤ ||T ||k
1− ||T ||||x(1) − x(0)||
hata sınırlarına sahiptir.
Örnek 2.2.418x1 − x2 + 3x3 = 1x1 − 5x2 − x3 = 03x1 + x2 + 6x3 = 2
lineer denklem sistemi için Jacobi ve Gauss-Seidel iterasyon yöntemleri yakın-sar mı?
x(k) = Tx(k−1) + c, k = 1, 2, · · · iterasyonunda T matrisini bulalım. Jacobi iteras-yon yöntemi için iterasyonlar
x(k+1)1 = 1
8x(k)2 − 3
8x(k)3 + 1
8
x(k+1)2 = 1
5x(k)1 − 1
5x(k)3
x(k+1)3 = −1
2x(k)1 − 1
6x(k)2 + 1
3
olarak elde edilir.
Gauss-Seidel iterasyon yöntemi için iterasyonlar
x(k+1)1 = 1
8x(k)2 − 3
8x(k)3 + 1
8
x(k+1)2 = 1
5x(k+1)1 − 1
5x(k)3
x(k+1)3 = −1
2x(k+1)1 − 1
6x(k+1)2 + 1
3
olarak elde edilir.
74

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Yani, T matrisi
T =
0 18 −3
815 0 −1
5−1
2 −16 0
olur.
||T ||∞ = max1≤i≤n∑n
j=1 |tij |= max{|18 |+ | −
38 |, |
15 |+ | −
15 |, |
12 |+ | −
16 |}
= max{12 ,
25 ,
23} = 2
3 < 1
||T ||∞ < 1
oldugundan Jacobi ve Gauss-Seidel iterasyon yöntemlerinde yakınsama olur.
Ax = b
lineer denklem sisteminin çözümünde kullanılan Jacobi iterasyon yöntemiiçin
T = ||D−1(L+ U)||
olur. Yakınsama için||T || < 1
olması gerekir. Örnegin,
||D−1(L+ U)|| = maxi
{∑nj=1,j 6=i |aij ||aii|
}
olarak hesaplanır. Buna göre
n∑j=1,j 6=i
|aij | < |aii|
kosulu saglanırsa Jacobi iterasyon yöntemi yakınsar. Bu sartı saglayan mat-rislere kesin kösegen baskın matris denir. Aynı durum Gauss-Seidel iteras-yon yöntemi için de geçerlidir.
Tanım 2.2.10 (Kösegen Baskın Matris/Diagonally Dominant Matrix)
nxn bouytlu A = [aij ] matrisi eger i = 1, 2, · · · , n için
n∑j=1,j 6=i
|aij | ≤ |aii|
75

Lineer Denklem Sistemleri (Sytems of Linear Equations)
kosulunu saglıyorsa Amatrisine kösegen baskın/diagonally dominant mat-ris denir.
Eger i = 1, 2, · · · , n içinn∑
j=1,j 6=i|aij | < |aii|
saglanıyorsa, A matrisine kesin kösegen baskın/strictly diagonally domi-nant matris denir.
Örnek 2.2.42
A =
7 2 03 5 −10 5 −6
veB =
6 4 −34 −2 0−3 0 1
verilmis olsun.
A matrisi|2|+ |0| < |7||3|+ | − 1| < |5||0|+ |5| < | − 6|
kosulunu sagladıgından kesin kösegen baskın matristir.
B matrisi|4|+ | − 3| < |6|
saglamadıgından kösegen baskın matris degildir.
Teorem 2.2.5 nxn boyutunda A = [aij ] matrisi kesin kösegen baskın matrisise
(1) A matrisinin tersi vardır, A−1 vardır.
(2) A matrisinin LU ayrısımı vardır.
Teorem 2.2.6 Ax = b lineer denklem sisteminde, A katsayılar matrisi kesinkösegen baskın matris ise
(i) Jacobi iterasyonu
(ii) Gauss-Seidel iterasyonu
ile olusturulan dizi herhangi bir baslangıç vektörü için Ax = b denklem sistemi-nin çözümüne yakınsar.
76

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
Örnek 2.2.43 Örnegin
10x1 − x2 = 9−x1 + 10x2 − 2x3 = 7−2x2 + 10x3 = 6
lineer denklem sisteminin katsayılar matrisi
A =
10 −1 0−1 10 −20 −2 10
kesin kösegen matris oldugu için verilen denklem sistemi için
(i) Jacobi iterasyonu
(ii) Gauss-Seidel iterasyonu
ile olusturulan dizi herhangi bir baslangıç vektörü için denklem sisteminin çö-zümüne yakınsar.
2.2.5 Hata, Rezidü, Norm ve Kosul Sayısı (Error, Residu, Norm andCondition Number)
Denklem sistemleri nümerik çözümünün nadiren tam çözümü vardır. Direkyöntemler (Gauss eleme, Gauss-Jordan, LU ayrısımı) tam olmasına ragmenyuvarlama hataları olusabilir. Bu durum özellikle büyük ve kötü kosullu sis-temlerde dogrudur. Iterasyon yöntemlerle elde edilen çözümler dogal olarakyaklasık çözümlerdir.
Özellikle kötü kosullu sistemlerde ve büyük boyutlu sistemlerde hata önemlihale gelir. Burada sayısal yöntemle elde edilen sayısal bir çözümdeki hata-nın genliginin tahmin edilmesi için neler yapılması gerektigi anlatılacaktır.Bu bölümde bir nümerik çözümün dogrulugunu veya hatanın büyüklügünütahmin etmeyi gösteren ölçümler anlatılacaktır.
Hata
Ax = b lineer denklem sisteminin gerçek çözümü xg, sayısal çözüm xs olsun.Bu durumda hata
e = xg − xsolur. Ancak gerçek hata, gerçek çözüm degeri bilinmiyorsa dogru olarak he-saplanamaz. Çözümün hassaslıgının belirlenmesinde alternatif olarak rezidüdegeri kullanılır. Rezidü
r = Axg −Axs = b−Axs
olarak tanımlanır.
77

Lineer Denklem Sistemleri (Sytems of Linear Equations)
Örnek 2.2.440.0004x1 + 19.78x2 = 19.7808
0.5432x1 + x2 = 2.0864
lineer denklem sisteminin gerçek çözümü xg =
[21
], sayısal çözümü
xs =
[3.6819
1
]olsun. Bu durumda hata
e = xg − xs =
[−1.6819
0
]ve rezidü
r = b−Axs =
[19.78082.0864
]−[
0.0004 19.780.5432 10
] [3.6819
1
]=
[−0.0007−0.9136
]olur.
Hata Sınırlarının Bulunmasında Normların Kullanımı
e = xg − xsr = Axg −Axs = A(xg − xs) = Aer = Ae =⇒ e = A−1r
||r|| = ||Ae|| ≤ ||A||||e|| =⇒ ||r||||A||
≤ ||e||
Eger son esitsizligin her iki tarafını da 1||xg || ile çarparsak
1
||A||||b||||xg||
||r||||b||≤ ||e||||xg||
≤ ||A−1|| ||b||||xg||
||r||||b||
Burada ||e||||xg || rölatif hata (relative error)dır.
Axg = b =⇒ ||Axg|| = ||b|| =⇒ ||b|| = ||Axg|| ≤ ||A||||xg|| =⇒ ||b||||xg||
≤ ||A||
elde edilir.
Ayrıca
Axg = b =⇒ xg = A−1b =⇒ ||xg|| = ||A−1b|| ≤ ||A−1|||b|| =⇒ ||b||||xg||
≥ ||A−1||
78

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
elde edilir.
Bunlar kullanılarak hata için üst sınır ve alt sınır asagıdaki gibi elde edilmisolur:
1
||A||||A−1||||r||||b||≤ ||e||||xg||
≤ ||A−1||||A|| ||r||||b||
Burada gerçek rölatif (bagıl) hata için alt ve üst sınır elde edilmistir. Gerçekrölatif hata bu sınırlar arasında yer almak zorundadır. Buna rölatif hatanıngenligi denir.
BuradacondA = ||A||||A−1||
sayısına A matrisinin kosul sayısı/condition number denir.
Bu durumda son esitsizlik
1
condA
||r||||b||≤ ||e||||xg||
≤ condA ||r||||b||
biçiminde de yazılabilir.
Matrisin kosul sayısı
(i) Problemin çözümü, problemi tanımlayan parametrelerdeki küçük degi-sikliklere çok hassas ise problem kötü kosulludur/bad conditioned.
(ii) Matrisi içeren problemler için, örnegin lineer denklem sistemi çözme,matrisin kosul sayısını bulmak hassasiyeti göstermek için kullanıslı ola-bilir.
(iii) Kosul sayısı birim matris için 1’dir. Herhangi bir matrisin kosul sayısı 1veya daha büyüktür.
Örnek 2.2.4510x1 − x2 + x3 − 3x4 = 13
−2x1 + 15x2 − 3x3 + 0.5x4 = 422x1 − 4x2 + 11x3 + 1.5x4 = −13
0.5x1 − 2.5x2 + 5.5x3 − 15x4 = 22
lineer denklem sistemi için gerçek çözüm ve sayısal çözümler
xg =
130−2
, xs =
1.00763.0029−0.162−1.9244
olarak verilsin.
79

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(a) Gerçek hata (e) ve rezidü (r) degerini,(b) xg, e, r ve b vektörleri için sonsuz normu(c) Sonsuz norm için A matrisinin kosul sayısını bulunuz.(d) Rölatif hata için üst ve alt sınırları dikkate alarak sonuçları degerlendiri-
niz.
(a)
e = xg − xs =
130−2
−
1.00763.0029−0.162−1.9244
=
−0.0076−0.0029
0.162−0.00756
r = Ae =
10 −1 1 3−2 15 −3 0.52 −4 11 1.5
0.5 −2.5 5.5 −15
−0.0076−0.0029
0.162−0.00756
=
0.3157−0.55211.66502.0284
(b)
||xg||∞ = max1≤i≤4 |xgi | = max{|1|, |3|, |0|, | − 2|} = 3||e||∞ = max1≤i≤4 |ei| = 0.162||r||∞ = max1≤i≤4 |ri| = 2.0284||b||∞ = max1≤i≤4 |bi| = 42
(c) Kosul sayısıcondA = ||A||∞||A−1||∞
Bunun için A−1 bulunmalıdır, elementar satır islemleri ile veya bilgisayarprogramı (örnegin MATLAB ile) bulunabilir.
A−1 =
0.1014 0.039 0.0018 −0.020.0108 0.0725 0.0178 0.002−0.014 0026 0.0928 0.0129−0.0036 −0.0024 0.0311 −0.0629
Bu durumda sonsuz norm satır elemanlarının mutlak degerleri toplamınınen büyügü oldugu için
||A||∞ = max1≤i≤n
n∑j=1
|aij | = max{|15|, |20.5|, |18.5|, |23.5|} = 23.5
olur.||A−1||∞ = 0.1457
olarak elde edilir. Bu durumda kosul sayısı
condA = ||A||∞||A−1||∞ = 3.424
olur.
80

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
(d)1
condA||r||||b|| ≤
||e||||xg || ≤ condA
||r||||b||
=⇒ 13.424
2.028442 ≤ ||e||
||xg || ≤ 3.4242.028442
=⇒ 0.0141 ≤ ||e||||xg || ≤ 0.1654
olur. Gerçek rölatif hata 0.0141 ve 0.1654 arasında olmalıdır. Gerçek rölatifhata
||e||||xg||
=0.162
3= 0.054
olup yukarda hesaplanan alt ve üst sınır arasında yer almaktadır.
Kötü Kosullu Denklem Sistemleri/Ill-conditioned systems of linear equ-ations
Katsayılar matrisinin tekil (tersi olmayan/singular) bir matrise çok yakın ol-ması, böyle bir durumu ortaya çıkarır. Katsayılardaki veya sag taraf sabitvektördeki küçük degisiklikler, sistemin çözümünde büyük degisikliklere se-bep olur. Katsayılar matrisinin kosul sayısının 1’den çok büyük olması denk-lem sisteminin kötü kosullu/ill-conditioned oldugunu gösterir.
Örnek 2.2.4610x1 − 4x2 = 10
−18.5x1 + 7.25x2 = −20
denklem sistemi kötü kosullu mudur? a21 = −18.4 alarak denklem sisteminiçözünüz. Sonsuz ve 1-normuna göre katsayılar matrisinin kosul sayısını bulu-nuz.
Verilen denklem sistemini Cramer kuralı ile çözelim.
detA =
∣∣∣∣ 10 −4−18.5 7.25
∣∣∣∣ = −1.5 6= 0
x1 =
∣∣∣∣ 10 −4−20 7.25
∣∣∣∣−1.5
=−7.5
−1.5= 5, x2 =
∣∣∣∣ 10 10−18.5 −20
∣∣∣∣−1.5
=−15
−1.5= 10
Verilen denklem sisteminde katsayılar matrisinde a21 = −18.5’dur. Bu katsayıdegerinde küçük bir degisiklik yapıp a21 = −18.4 alalım. Bu degisim denklemsisteminin çözümünü nasıl etkiledigine bakalım.
x1 =
∣∣∣∣ 10 −4−20 7.25
∣∣∣∣∣∣∣∣ 10 −4−18.4 7.25
∣∣∣∣ =−7.5
−1.1= 6.82, x2 =
∣∣∣∣ 10 10−18.5 −20
∣∣∣∣∣∣∣∣ 10 −4−18.4 7.25
∣∣∣∣ = 14.55
81

Lineer Denklem Sistemleri (Sytems of Linear Equations)
olur. Görüldügü gibi katsayıdaki küçük bir degisiklik çözüm üzerinde büyükdegismelere sebep olmustur. Bu nedenle denklem sistemi kötü kosulludur.
A =
[10 −4−18.5 7.25
], A−1 =
1
−1.5
[7.25 418.5 10
]Bu durumda sonsuz norma göre kosul sayısı
||A||∞ = 26, ||A−1||∞ = 19 =⇒ condA = (26)(19) = 494 > 1
olur. Bu kosul sayısı 1’den çok büyüktür. 1-normuna göre kosul sayısı
||A||1 = 28.5, ||A−1||1 = 17.1666 =⇒ condA = (28.5)(17.1666) = 489.25 > 1
Bu kosul sayısı 1’den çok büyüktür. Denklem sistemi kötü kosulludur.
Kosul sayısı bir matrisin ne kadar iyi kosullu oldugunu ölçer. Kosul sayısıbüyük ise matris kötü kosulludur. Kosul sayısı bire yakın ise iyi kosulluolarak adlandırılır. Birden önemli derecede büyük ise kötü kosullu olarakadlandırılır.
82

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
2.2.6 Alıstırmalar
(1) Asagıdaki lineer denklem sisteminin çözümünü (varsa) Cramer kuralıile bulunuz.
2x1 − x2 + 3x3 = 94x1 + 3x2 + 5x3 = 27
x1 + 4x2 = 9
C: x1 = −3, x2 = 3, x3 = 6
(2) Asagıdaki lineer denklem sisteminin çözümünü (varsa) Cramer kuralıile bulunuz.
x1 + x2 + x3 = 62x1 + 4x2 + 2x3 = 16−x1 + 5x2 − 4x3 = −3
C: x1 = 1, x2 = 2, x3 = 3
(3) Asagıdaki lineer denklem sisteminin çözümü varsa Gauss eleme yön-temi ile bulunuz.
x1 + 2x2 + x3 + 4x4 = 132x1 + 4x3 + 3x4 = 28
4x1 + 2x2 + 2x3 + x4 = 20−3x1 + x2 + 3x3 + 2x4 = 6
C: x1 = 3, x2 = −1, x3 = 4, x4 = 2
(4) Asagıdaki lineer denklem sisteminin çözümünü Gauss eleme yöntemiile bulunuz.
2x1 − 3x2 − 4x3 + 5x4 = 4−x1 − 5x2 + 2x3 − 10x4 = −29x1 + 4x2 − 3x3 − x4 = 16−x1 + x2 + 5x3 − 2x4 = −6
C: x1 = 2, x2 = 3, x3 = −1, x4 = 1
(5) Asagıdaki lineer denklem sisteminin çözümünü Gauss eleme yöntemiile bulunuz.
2x1 − 4x2 + x3 = −44x1 − 8x2 + 7x3 = 2−2x1 + 4x2 − 3x3 = 5
C: Çözüm yoktur.
(6) Asagıdaki lineer denklem sisteminin çözümünü Gauss eleme yöntemiile bulunuz.
3x1 + 6x2 − 9x3 = 152x1 + 4x2 − 6x3 = 10−2x1 − 3x2 + 4x3 = −6
83

Lineer Denklem Sistemleri (Sytems of Linear Equations)
C: Sonsuz çözüm vardır. Çözüm kümesi
S = {(−3− t, 4 + 2t, t) : t ∈ R}
olur.
(7)0.0003x1 + 59.14x2 = 59.175.291x1 − 6.13x2 = 46.78
Denklem sisteminin gerçek çözümü
x1 = 10, x2 = 1
olarak verilmistir. Gauss eleme ile ve pivotlama ile Gauss eleme çözümübulunuz.
C: Gauss eleme ile x1 = −9.713, x2 = 1.001 bulunur. Pivotlama ile Gausseleme ile gerçek çözüm bulunur.
(8) Asagıdaki lineer denklem sisteminin çözümünü varsa Gauss-Jordaneleme yöntemi ile bulunuz.
2x1 − x2 + 3x3 = 94x1 + 3x2 + 5x3 = 27
x1 + 4x2 = 9
C: x1 = −3, x2 = 3, x3 = 6
(9) Asagıdaki lineer denklem sisteminin çözümünü varsa Gauss-Jordaneleme yöntemi ile bulunuz.
x1 + x2 + x3 = 1−x1 − x2 + x3 = 3x1 + x2 + 2x3 = 5
C: Çözüm yoktur.
(10) Asagıdaki lineer denklem sisteminin çözümünü varsa Gauss-Jordaneleme yöntemi ile bulunuz.
x1 + x2 + x3 = 2−x1 − x2 + x3 = 0x1 + x2 + 2x3 = 3
C: Sonsuz çözüm vardır. S = {(1− t, t, 1) : t ∈ R}
84

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
(11) A matrisi
A =
1 2 3 44 3 2 11 1 2 22 2 1 1
olsun. A matrisinin determinantını elementar satır islemlerini kullana-rak bulunuz.
C: detA = 0
(11) A matrisi
A =
2 4 2 14 3 0 −1−6 0 2 00 1 1 2
olsun. A matrisinin determinantını elementar satır islemlerini kullana-rak bulunuz.
C: detA = 14
(12) A matrisi
A =
1 −1 01 0 −16 −2 −3
olsun. A matrisinin tersini (varsa) elementar satır islemlerini kullanarakbulunuz.
C:
A−1 =
−2 −3 1−3 −3 1−2 −4 1
(13) A matrisi
A =
1 2 3 44 3 2 11 1 2 22 2 1 1
olsun. A matrisinin tersi (varsa) elementar satır islemlerini kullanarakbulunuz.
C: A matrisinin tersi yoktur.
(14)
A =
2 2 35 9 104 1 2
85

Lineer Denklem Sistemleri (Sytems of Linear Equations)
matrisinin LU çarpanlarını (A = LU olacak sekilde L:alt üçgen, U: üstüçgen matrislerini) Gauss eleme yöntemi kullanarak bulunuz.
C: L =
1 0 052 1 02 −3
4 1
, U =
2 2 30 4 5
20 0 −17
8
(15)
A =
2 4 −61 5 31 3 2
matrisinin LU çarpanlarını Doolittle yöntemi kullanarak bulunuz.
C: L =
1 0 012 1 012
13 1
, U =
2 4 −60 3 60 0 3
(16)
A =
1 2 32 7 21−1 −1 6
matrisinin LU çarpanlarını Crout yöntemi kullanarak bulunuz.
C: L =
1 0 02 3 0−1 1 4
, U =
1 2 30 1 50 0 1
(17)
3x1 + 4x2 + 2x3 = 155x1 + 2x2 + x3 = 182x1 + 3x2 + 2x3 = 10
lineer denklem sistemini Doolittle LU ayrısımı kullanarak çözünüz.
C: L =
1 0 053 1 023 −1
4 1
, U =
3 4 20 −14
3 −73
0 0 12
olur. Önce Ly = b çözülür.
y =
15−7−1
2
bulunur. Sonra Ux = y çözülür. Denklem sisteminin çözümü
x1 = 3, x2 = 2, x3 = −1
olur.
(18)x1 + 2x2 + 3x3 = 19
2x1 + 7x2 + 21x3 = 116−x1 − x2 + 6x3 = 27
86

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
lineer denklem sistemini Crout LU ayrısımı kullanarak çözünüz.
C: L =
1 0 02 3 0−1 1 4
, U =
1 2 30 1 50 0 1
olur. Denklem sisteminin çözümü
x1 = 2, x2 = 1, x3 = 5
olur.
(19)
A =
4 2 142 17 −514 −5 83
matrisinin pozitif tanımlı oldugunu gösterin.
(19)
A =
4 −1 1−1 4.25 2.751 2.75 3.5
pozitif tanımlı matrisini Cholesky Yöntemi ile A = LLT seklinde çar-panlara ayırınız.
C: L =
2 0 0−0.5 2 00.5 1.5 1
(20)
−5x1 − x2 + 2x3 = 12x1 + 6x2 − 3x3 = 22x1 + x2 + 7x3 = 32
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0) alarak Jacobiiterasyon yöntemi ile ilk iki noktayı bulunuz.
C: x(1) = (−0.2, 0.3333, 4.5714), x(2) = (1.5619, 2.6857, 4.5810)
(20)9x1 + x2 + x3 = 10
2x1 + 10x2 + 3x3 = 193x1 + 4x2 + 11x3 = 0
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0) alarak Jacobiiterasyon yöntemi ile ilk iki noktayı bulunuz.
C: x(1) =(
109 ,
1910 , 0
), x(2) =
(−19
90 ,15190 ,
984990
)
87

Lineer Denklem Sistemleri (Sytems of Linear Equations)
(21)4x1 − x2 + x3 = 74x1 − 8x2 + x3 = −21−2x1 + x2 + 5x3 = 15
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0), ε = 0.0001alarak Gauss-Seidel iterasyon yöntemi çözünüz. Gerçek çözüm x∗ =(2, 4, 3) olarak verilmistir. Yakınsama için kaç iterasyon gereklidir bulu-nuz.
C:iterasyon x1 x2 x3 ε
0 0 0 0 0.0001
1 1.75 3.5 3 0.0001
2 1.875 3.9375 2.9625 0.0001
3 1.99375 3.992188 2.999063 0.0001
4 1.998281 3.999023 2.999508 0.0001
5 1.999879 3.999878 2.999976 0.0001
6 1.999975 3.999985 2.999993 0.0001
7 1.999998 3.999998 3 0.0001
8 2 4 3 0.0001
(22)4x1 − x2 − x3 = 3−2x1 + 6x2 + x3 = 9−x1 + x2 + 7x3 = −6
lineer denklem sistemini baslangıç noktasını x(0) = (0, 0, 0) alarak Gauss-Seidel iterasyon yöntemi ile ilk iki noktayı bulunuz.
C: x(1) = (0.75, 1.75,−1), x(2) = (0.938, 1.979,−1.006)
(23)13x1 + 5x2 − 3x3 + x4 = 182x1 + 12x2 + x3 − 4x4 = 133x1 − 4x2 + 10x3 + x4 = 292x1 + x2 − 3x3 + 9x4 = 31
lineer denklem sisteminin çözümü için Jacobi ve Gauss-Seidel yöntem-leri yakınsar mı? Neden?
C: Iki yöntemde yakınsar, çünkü katsayılar matrisi A kesin kösegenbaskın matristir.
(24)9x1 − 2x2 + 3x3 + 2x4 = 54.52x1 + 8x2 − 2x3 + 3x4 = −14−3x1 + 2x2 + 11x3 − 4x4 = 12.5−2x1 + 3x2 + 2x3 + 10x4 = −21
88

Lineer Denklem Sistemleri için Çözüm Yöntemleri (Solution Methods for Systems of Linear Equations)
lineer denklem sistemi için gerçek çözüm ve sayısal çözümler
xg =
5−22.5−1
, xs =
4.98805−1.995112.49806−1.00347
olarak verilsin.
(a) Gerçek hata (e) ve rezidü (r) degerini,
(b) xg, e, r ve b vektörleri için sonsuz normu
(c) Sonsuz norm için A matrisinin kosul sayısını bulunuz.
(d) Rölatif hata için üst ve alt sınırları dikkate alarak sonuçları deger-lendiriniz.
C:
(b) ||xg||∞ = 5, ||e||∞ = 0.0119, ||r||∞ = 0.13009, ||b||∞ = 54.5
(c) condA = ||A||∞||A−1||∞ = 20(0.1902) = 3.804
(d) 6.275x10−4 ≤ ||e||||xg || ≤ 0.00908 burada ||e||
||xg || = 0.00238.
(25)x1 + 2x2 = 4
2x1 + 3.999x2 = 2.999
denklem sistemi kötü kosullu mudur? b =
[4.0012.998
]alarak denklem sis-
temini çözünüz. Sonsuz ve 1-normuna göre katsayılar matrisinin kosulsayısını bulunuz.
C: Gerçek çözüm: x1 = 2, x2 = 1, b degisince çözüm x1 = −3.999, x2 = 4.00kötü kosulludur. Sonsuz norma göre condA = 3.5988x104, 1-norma görekosul sayısı condA = 3.5988x104 kosul sayısı birden çok büyüktür. Kötükosulludur.
(26)2x1 − 6αx2 = 33αx1 − x2 = 3/2
denklem sistemi için
(a) tek çözümü
(b) çözümsüz olmasını
(c) sonsuz çözüm olmasını
saglayan α deger/degerlerini bulunuz.
C: (a) α ∈ R\{−1
3 ,13
}için tek çözüm vardır. (b) α = −1
3 için çözüm yoktur.(c) α = 1
3 için sonsuz çözüm vardır.
89


3 Sayısal Türev (NumericalDifferentiation)
Türev kavramı sayısal analizin temel konularından biridir. Analitik olaraktürevin hesaplanmasının uzun ve zor oldugu durumlarda sayısal türev yön-temleri kullanılmaktadır. Fonksiyonun kendisinin degilde sadece belirli nok-talardaki degerinin bilindigi durumlarda da sayısal türev formülleri ile iste-nen noktada türeve bir yaklasım elde edilebilir. Türevin geometrik yorumunabakıldıgında, belirli bir noktadaki türev fonksiyonun o noktadaki çizilen tegetdogrusunun egimidir. Fiziksel dünyada ise bir gözlemler/ölçümler degerinintürevi, ölçülen veya gözlenen degerlerin uzaklıga veya zamana baglı degisi-mini yansıtır. Yani türev fiziksel dünyadaki degisimlerin belirlenmesi esasınadayanır. Türev, bir niceligin nasıl bir hızla degistiginin belirlenmesini saglar,bize özel anla ilgili bilgi verir. Sayısal türev örnegin adi ve kısmi diferansiyeldenklemlerin sayısal çözümleri için yöntem elde etmekte kullanılmaktadır.
y = f(x) fonksiyonunun türevi
dy
dx, y′,df
dxveya f ′(x)
ile gösterilir. Belirli bir x = x0 noktasındaki türevi
dy
dx|x=x0 , y
′|x=x0 ,df
dx|x=x0veya f ′(x0)
ile gösterilir.
Tanım 3.0.1 (Türev)
f fonksiyonunun x = x0 noktasındaki türevi limitin varlıgının garantisi altında
f ′(x0) = limh→0
f(x0 + h)− f(x0)
h
olarak tanımlıdır.
Bu formül kullanılarak h’nin yeterince küçük degerleri için
f(x0 + h)− f(x0)
h
91

Sayısal Türev (Numerical Differentiation)
oranının f ′(x0) türevine bir yaklasım oldugunu söylemek mümkündür.
Taylor Seri Açılımı Kullanarak Sayısal Türev
f(x) fonksiyonunun x0 + h noktasındaki Taylor serisinin ilk üç terimi
f(x0 + h) = f(x0) + hf ′(x0) +h2
2f′′(c), c ∈ (x0, x0 + h)
olarak yazılır. Bu denklemi f ′(x0) için çözersek
f ′(x0) =f(x0 + h)− f(x0)
h− h
2f′′(c)
burada h2f′′(c) hata terimidir. Burada hata terimi h ile orantılıdır. Hata h kü-
çüldükçe önce azalacak, ancak bir süre sonra yuvarlama hataları (round-offerror) önemli olmaya baslayınca artmaya baslayacaktır. Buradaki hata kesmehatasıdır. Taylor serisi üç terimden sonra kesilmistir.
Eger hata terimi h2f′′(c) ihmal edilirse
f ′(x0) ≈ f(x0 + h)− f(x0)
h
yaklasımı elde edilir. Bu yaklasıma ileri fark formulü/forward differenceformula denir.
c noktası bilinmediginden hata teriminin hesaplanması mümkün degildir. Fa-kat eger tüm x ∈ (x0, x0 + h) degerleri için
|f ′′(x)| ≤M
kosulu saglanıyorsa f(x0+h)−f(x0)h oranının f ′(x0) degerine
M |h|2
hata sınırına sahip bir yaklasım oldugu sonucu elde edilir.
Benzer sekilde f(x) fonksiyonunun x0−h noktasındaki Taylor serisinin ilk üçterimi
f(x0 − h) = f(x0)− hf ′(x0) +h2
2f′′(c), c ∈ (x0 − h, x0)
olarak yazılır. Bu denklemi f ′(x0) için çözersek
f ′(x0) =f(x0)− f(x0 − h)
h+h
2f′′(c)
92

Sayısal Türev (Numerical Differentiation)
𝒙𝟎 + 𝒉 𝒙𝟎 𝒙𝟎 − 𝒉
𝐴 =
𝜋𝑟2
x
y
𝒇′(𝒙𝟎) eğimi
𝒇(𝒙𝟎+𝒉)−𝒇(𝒙𝟎)
𝒉 eğimi
𝒇(𝒙𝟎)
𝒇(𝒙𝟎 + 𝒉)
𝒇(𝒙𝟎 + 𝒉) − 𝒇(𝒙𝟎)
𝒉
Sekil 3.1: Ileri fark formulü
burada h2f′′(c) hata terimidir. Burada da benzer sekilde hata terimi h ile oran-
tılıdır. Hata h küçüldükçe önce azalacak, ancak bir süre sonra yuvarlama ha-taları önemli olmaya baslayınca artmaya baslayacaktır. Buradaki hata kesmehatasıdır. Taylor serisi üç terimden sonra kesilmistir.
Eger hata terimi h2f′′(c) ihmal edilirse
f ′(x0) ≈ f(x0)− f(x0 − h)
h
yaklasımı elde edilir. Bu yaklasıma geri fark formulü/backward differenceformula denir.
c noktası bilinmediginden hata teriminin hesaplanması mümkün degildir. Fa-kat eger tüm x ∈ (x0 − h, x0) degerleri için
|f ′′(x)| ≤M
kosulu saglanıyorsa f(x0)−f(x0−h)h oranının f ′(x0) degerine
M |h|2
hata sınırına sahip bir yaklasım oldugu sonucu elde edilir.
f ′(x0) için daha iyi bir yaklasım elde etmek istersek Taylor serilerinde dahafazla terim alarak
93

Sayısal Türev (Numerical Differentiation)
𝒙𝟎 + 𝒉 𝒙𝟎 𝒙𝟎 − 𝒉
𝐴 =
𝜋𝑟2
x
y
𝒇′(𝒙𝟎) eğimi
𝒇(𝒙𝟎)−𝒇(𝒙𝟎−𝒉)
𝒉 eğimi
Sekil 3.2: Geri fark formulü
f(x0 + h) = f(x0) + hf ′(x0) +h2
2!f′′(x0) +
h3
3!f′′′
(x0) +h4
4!f (4)(c1), c1 ∈ (x0, x0 + h)
f(x0 − h) = f(x0)− hf ′(x0) +h2
2!f′′(x0)− h3
3!f′′′
(x0) +h4
4!f (4)(c2), c2 ∈ (x0 − h, x0)
Burada terim terim çıkarma yaparsak
f(x0 + h)− f(x0 − h) = 2hf ′(x0) +2h3
3!f′′′
(c), c ∈ (x0 − h, x0 + h)
olur. Bu denklemi f ′(x0) için çözersek
f ′(x0) =f(x0 + h)− f(x0 − h)
2h− h2
3!f′′′
(c), c ∈ (x0 − h, x0 + h)
elde edilir. Burada hata terimi h2 ile orantılıdır. h küçüldükçe hata terimi ilerive geri fark formüllerine göre daha hızlı azalır.
f ′(x0) degeri için
f ′(x0) ≈ f(x0 + h)− f(x0 − h)
2h
yaklasımına merkezi fark formulü/central difference formula denir. c nok-
94

Sayısal Türev (Numerical Differentiation)
𝒙𝟎 + 𝒉 𝒙𝟎 𝒙𝟎 − 𝒉
𝐴 =
𝜋𝑟2
x
y
𝒇′(𝒙𝟎) eğimi
𝒇(𝒙𝟎+𝒉)−𝒇(𝒙𝟎−𝒉)
𝟐𝒉
eğimi
Sekil 3.3: Merkezi fark formulü
tası bilinmediginden hata teriminin hesaplanması mümkün degildir. Fakateger tüm x ∈ (x0 − h, x0 + h) degerleri için
|f ′′′(x)| ≤M
kosulu saglanıyorsa f(x0+h)−f(x0−h)2h oranının f ′(x0) degerine
Mh2
6
hata sınırına sahip bir yaklasım oldugu sonucu elde edilir.
Örnek 3.0.1 h = 0.1 ve h = 0.05 alarak ileri fark, geri fark ve merkezi farkformülleri yardımıyla x0 = 1 noktasında f(x) = x3 fonksiyonunun türev dege-rine yaklasımlarını bulunuz. Her bir h degeri için olusan rölatif hata yüzdesihesaplayınız. Mutlak hataları ve hata sınırlarını hesaplayalım.
(a) h = 0.1 alınırsa x0 = 1, x0 + h = 1.1, x0 − h = 0.9:
Ileri fark: f ′(1) ≈ f(1.1)−f(1)0.1 = (1.1)3−13
0.1 = 1.331−10.1 = 3.31
Geri fark: f ′(1) ≈ f(1)−f(0.9)0.1 = 13−(0.9)3
0.1 = 1−0.7290.1 = 2.71
Merkezi fark: f ′(1) ≈ f(1.1)−f(0.9)2(0.1) = (1.1)3−(0.9)3
0.2 = 1.331−0.7290.2 = 3.01
yaklasımları bulunur.
95

Sayısal Türev (Numerical Differentiation)
(b) h = 0.05 alınırsa x0 = 1, x0 + h = 1.05, x0 − h = 0.95:
Ileri fark: f ′(1) ≈ f(1.05)−f(1)0.05 = (1.05)3−13
0.05 = 3.1525
Geri fark: f ′(1) ≈ f(1)−f(0.95)0.05 = 13−(0.95)3
0.05 = 2.8525
Merkezi fark: f ′(1) ≈ f(1.05)−f(0.95)2(0.05) = (1.05)3−(0.95)3
2(0.05) = 3.0025
yaklasımları bulunur.
Gerçek türevf(x) = x3 =⇒ f ′(x) = 3x2 =⇒ f ′(1) = 3
olur.
Rölatif (bagıl) hata yüzdeleri ve mutlak hatalar, hata sınırları:
(a) h = 0.1 için
Ileri fark: εr = |3−3.31||3| x100 = %10.33, εm = |3− 3.31| = 0.31
Geri fark: εr = |3−2.71||3| x100 = %9.66, εm = |3− 2.71| = 0.29
Merkezi fark: εr = |3−3.01||3| x100 = %0.333, εm = |3− 3.01| = 0.01
olarak hesaplanır. Merkezi fark formülü ile hesaplanan daha küçük hatavermistir.
Hata sınırları için, f ′(x) = 3x2, |f ′(x)| ≤ 6.6, x ∈ [1, 1.1] oldugundan ileri farkiçin hata sınırı
E ≤ 6.6(0.1)
2= 0.33
f ′(x) = 3x2, |f ′(x)| ≤ 6, x ∈ [0.9, 1] oldugundan geri fark için hata sınırı
E ≤ 6(0.1)
2= 0.3
f′′′
(x) = 6, |f ′′′(x)| ≤ 6, x ∈ [0.9, 1.1] oldugundan merkezi fark için hata sınırı
E ≤ 6(0.1)2
6= 0.01
(b) h = 0.05 için
Ileri fark: εr = |3−3.1525||3| x100 = %5.08, εm = |3− 3.1525| = 0.1525
Geri fark: εr = |3−2.8525||3| x100 = %4.916, εm = |3− 2.8525| = 0.1475
Merkezi fark: εr = |3−3.0025||3| x100 = %0.0833, εm = |3− 3.0025| = 0.0025
olarak hesaplanır. h = 0.05 için hatalar daha da azalmıstır. Merkezi farkformülü ile hesaplanan daha küçük hata vermistir.
96

Sayısal Türev (Numerical Differentiation)
Hata sınırları için, f ′(x) = 3x2, |f ′(x)| ≤ 6.3, x ∈ [1, 1.05] oldugundan ilerifark için hata sınırı
E ≤ 6.3(0.1)
2= 0.31
f ′(x) = 3x2, |f ′(x)| ≤ 6, x ∈ [0.95, 1] oldugundan geri fark için hata sınırı
E ≤ 6(0.1)
2= 0.3
f′′′
(x) = 6, |f ′′′(x)| ≤ 6, x ∈ [0.95, 1.05] oldugundan merkezi fark için hatasınırı
E ≤ 6(0.05)2
6= 0.025
Örnek 3.0.2 h = 0.1 ve h = 0.01 alarak ileri fark yardımıyla x0 = 1.8 nokta-sında f(x) = lnx fonksiyonunun türev degerine yaklasımlarını bulunuz. Herbir h degeri için yaklasımda olusan hataya ait sınır belirleyiniz. h = 0.1 için
f ′(1.8) ≈ f(1.8 + 0.1)− f(1.8)
0.1=
ln 1.9− ln 1.8
0.1= 0.5406722127 = y
olarak hesaplanır.
h = 0.01 için
f ′(1.8) ≈ f(1.8 + 0.01)− f(1.8)
0.01=
ln 1.81− ln 1.8
0.01= 0.5540180376 = y
olarak hesaplanır.
Gerçek türev degeri
f(x) = lnx =⇒ f ′(x) =1
x=⇒ f ′(1.8) =
1
1.8= 0.5 = y∗
olur. Bulunan degerlerin gerçek türev degerine yakın oldugu gözlemlenmekte-dir. Ikinci mertebeden türev
f′′(x) = − 1
x2
olup bu fonksiyonun (1.8, 1.8 + h) aralıgındaki maksimum (en büyük) degerix = 1.8 noktasında olur. Bu nedenle x ∈ (1.8, 1.8 + h) için
|f ′′(x)| ≤ max1.8≤x≤1.8+h
∣∣∣∣ 1
x2
∣∣∣∣ =1
(1.8)2=
25
81= 0.3086419753 = M
olarak bulunur.
97

Sayısal Türev (Numerical Differentiation)
h = 0.1 için yapılan yaklasımda olusan hatanın sınırı
E ≤ M |h|2
=25
81
0.1
2= 0.01543209877
h = 0.1 için gerçek hata E = |y∗ − y| = 0.0148833428. Gerçek hata sınırdanküçüktür. h = 0.01 için yapılan yaklasımda olusan hatanın sınırı
E =M |h|
2=
25
81
0.01
2= 0.001543209877
olarak bulunur. h = 0.01 için gerçek hata E = |y∗ − y| = 0.0015375179. Gerçekhata sınırdan küçüktür.
Ikinci Türev için Orta Nokta Formülü
f(x0 + h) = f(x0) + hf ′(x0) +h2
2!f′′(x0) +
h3
3!f′′′
(x0) +h4
4!f (4)(x0) +
h5
5!f (5)(x0) + · · ·
f(x0 − h) = f(x0)− hf ′(x0) +h2
2!f′′(x0)− h3
3!f′′′
(x0) +h4
4!f (4)(x0)− h5
5!f (5)(x0) + · · ·
Toplarsak
f(x0 + h) + f(x0 − h) = 2f(x0) + h2f′′(x0) + 2
h4
4!f (4)(x0) + · · ·
elde edilir. Buradan f′′(x0) için çözersek
f′′(x0) =
f(x0 + h)− 2f(x0) + f(x0 − h)
h2− h2
12f (4)(c), c ∈ (x0 − h, x0 + h)
olarak elde edilir.
Mutlak hata için üst sınır
E ≤ Mh2
12
burada |f (4)(x)| ≤M, x ∈ [x0 − h, x0 + h].
Örnek 3.0.3 h = 0.1 için f(x) = x3 fonksiyonunun ikinci mertebeden türevininyaklasık degerini x0 = 1 noktasında bulunuz. Rölatif hata yüzdesini bulunuz.
Gerçek deger
f(x) = x3 =⇒ f ′(x) = 3x2 =⇒ f′′(x) = 6x =⇒ f
′′(1) = 6
olarak bulunur.
98

Sayısal Türev (Numerical Differentiation)
Yaklasık deger
f′′(1) ≈ f(1.1)− 2f(1) + f(0.9)
(0.1)2= 6, εr = %0
bulunur.
Mutlak hata için üst sınıra bakalım.
f(x) = x3, f ′(x) = 3x2, f′′(x) = 6x, f
′′′(x) = 6, f (4)(x) = 0
Bu durumda M = 0 olur ve E ≤ 0 olur. Bu nedenle E = 0 bulunur.
Örnek 3.0.4 f(x) = x sinx ve h = 0.1 olmak üzere f ′′(1) degeri için bir yakla-sımda bulununuz. Bu yaklasımda olusan mutlak hatayı hesaplayınız ve hataiçin bir üst sınır belirleyiniz.
f(x) = x sinx, x0 = 1, h = 0.1 için
f′′(1) ≈ 1
h2[f(x0 + h)− 2f(x0) + f(x0 − h)]
≈ 1(0.1)2
[f(1.1)− 2f(1) + f(0.9)]
≈ 0.23803
olarak bulunur. Gerçek ikinci türev f(x) = x sinx ise f ′(x) = sinx + x cosx vef′′(x) = 2 cosx− x sinx oldugundan
f′′(1) = 2 cos 1− sin 1 = 0.23913
olur. Mutlak hataem = |0.23913− 0.23803| = 1.1x10−3
olur. Hata terimi dördüncü türevi içerdiginden f′′′
(x) = −x cosx−3 sinx ve f (4)(x) =−4 cosx+ x sinx olmak üzere yaklasımda olusan hata için bir üst sınır
E ≤ h2
12max
c∈[0.9,1.1]|f (4)(c)|
esitsizligi ile verilir. Buna göre sinx ve cosx fonksiyonlarının her x için birdenküçük ve [0.9, 1.1] aralıgında sinx fonksiyonu artan, cosx fonksiyonu ise azalanoldugundan hata için üst sınır
E ≤ (0.1)2
12max
c∈[0.9,1.1]|−4 cos c+ c sin c| = (0.1)2
12|−4 cos 0.9 + 0.9 sin 0.9| = 1.4945x10−3
olarak elde edilir. Gerçek mutlak hatanın üst sınırdan küçük oldugu görülür.
99

Sayısal Türev (Numerical Differentiation)
Örnek 3.0.5 Bir ok yerden V0 = 40 m/s’lik baslangıç hızıyla dikey olarak atı-lırsa kat ettigi mesafeler zamana baglı olarak asagıdaki tabloda verilmistir.Okun t = 3 saniyedeki hızını geri fark ve merkezi fark formülleri yardımıylahesaplayınız. Gerçek hızı bulup, rölatif hata yüzdesini bulunuz. Okun t = 3saniyedeki gerçek ivmesini ve yaklasık ivmesini bulup rölatif hata yüzdesinihesaplayınız.
t (sn) 0 1 2 3 4y(t) (m) 0 35.1 60.4 75.9 81.6
g yerçekimi ivmesi, V0 ilk hız olmak üzere yer çekimi ivmesi altında düsey ola-rak hareket eden bir cismin yüksekligi
y(t) = −1
2gt2 + V0t+ y0
fonksiyonu ile verilir. Hızın gerçek degeri, türev alınarak bulunur:
dy
dt= V (t) = −gt+ V0
burada g = 9.8m/s2 olarak kullanılırsa t = 3. saniyedeki gerçek hız
V (3) = (−9.8)3 + 40 = 10.6 m/s
olarak bulunur.
Yaklasık hız degerini tablodan bulalım.
Geri fark: y′(3) ≈ y(3)−y(2)1 = 75.9−60.4
1 = 15.5 m/sMerkezi fark: y′(3) ≈ y(4)−y(2)
2(1) = 81.6−60.42 = 10.6 m/s
Rölatif hata yüzdeleri
Geri fark: εr = |10.6−15.5||10.6| = %46.2
Merkezi fark: εr = %0
olarak bulunur.
Gerçek ivme degeriy′′(t) = −g = −9.8m/s2 = y
′′(3)
olur. Yaklasık ivme degeri
y′′(3) ≈ y(4)− 2y(3) + y(2)
12=
81.6− 2(75.9) + 60.4
1= −9.8m/s2
olarak bulunur. Yani, hata sıfırdır, gerçek deger ile aynı deger bulunmustur.
100

Sayısal Türev (Numerical Differentiation)
Ileri fark, geri fark, merkezi fark formülleri dısında da sayısal türev için for-müller vardır. Bu formüller Lagrange interpolasyon polinomlarını kullanarakbulunabilir.
Üç Nokta Formülleri
Bir f(x) fonksiyonunun x0 noktasındaki türevi için üç nokta kullanılarakyapılan türev yaklasımlarından bazıları asagıda verilmistir.
f ′(x0) =1
2h[f(x0 − 2h)− 4f(x0 − h) + 3f(x0)] +
h2
3f′′′
(c), c ∈ (x0 − 2h, x0) (3.1)
f ′(x0) =1
2h[−3f(x0) + 4f(x0 + h)− f(x0 + 2h)] +
h2
3f′′′
(c), c ∈ (x0, x0 + 2h) (3.2)
f ′(x0) =1
2h[f(x0 + h)− f(x0 − h)]− h2
6f′′′
(c), c ∈ (x0 − h, x0 + h) (3.3)
Sonuncu formül merkezi fark olarak bilinir.
Bes Nokta Formülleri
Bir f(x) fonksiyonunun x0 noktasındaki türevi için bes nokta kullanılarakyapılan türev yaklasımlarından bazıları asagıda verilmistir.
c ∈ (x0 − 2h, x0 + 2h) için
f ′(x0) =1
12h[f(x0 − 2h)− 8f(x0 − h) + 8f(x0 + h)− f(x0 + 2h)] +
h4
30f (5)(c) (3.4)
c ∈ (x0, x0 + 4h) için
Örnek 3.0.6 f(x) = xex fonksiyonunun bazı noktalardaki degerleri asagıdaverilmistir. f ′(2.0) degeri için üç nokta ve bes nokta formüllerini kullanarak biryaklasımda bulununuz ve mutlak hatayı hesaplayınız.
x f(x)
1.8 10.889365
1.9 12.703199
2.0 14.778112
2.1 17.148957
2.2 19.855033
h = 0.1 için 3.2 de verilen üç nokta formülünü kullanarak
f ′(2.0) ≈ 1
2(0.1)[−3f(2.0) + 4f(2.1)− f(2.2)] = 22.032310
101

Sayısal Türev (Numerical Differentiation)
yaklasımı elde edilir. Bu formül ile h = −0.1 degeri için yapılan yaklasımınsonucu ise 22.054525 olarak bulunur.
h = 0.1 için 3.3 de verilen üç nokta formülünü kullanarak
f ′(2.0) ≈ 1
2(0.1)[f(2.1)− f(1.9)] = 22.228790
yaklasımı elde edilir. Bu formül ile h = 0.2 degeri için yapılan yaklasımın so-nucu ise 22.414163 olarak bulunur.
h = 0.1 için 3.4 de verilen bes nokta formülünü kullanarak
f ′(2.0) ≈ 1
12(0.1)[f(1.8)− 8f(1.9) + 8f(2.1)− f(2.2)] = 22.166999
yaklasımı elde edilir.
Türevin gerçek degeri f ′(x) = ex(1 + x) oldugundan
f ′(2.0) = e2.0(1 + 2.0) = 22.167168
Buna göre yapılan yaklasımlarda olusan mutlak hata asagıda tabloda veril-mistir:
Kullanılan formül Adım Uzunlugu Mutlak Hata3.2 üç nokta formülü h = 0.1 1.35x10−1
3.2 üç nokta formülü h = −0.1 1.13x10−1
3.3 üç nokta formülü h = 0.1 6.16x10−2
3.3 üç nokta formülü h = 0.2 2.47x10−1
3.4 bes nokta formülü h = 0.1 1.69x10−4
Türev Yaklasımında Olusan Yuvarlama Hataları
Türev hesabında hem kesme hemde yuvarlama hataları vardır. Bu durumabakmak için 3.3 ile verilen üç nokta formulünü (merkezi fark formulü) elealalım, c ∈ (x0 − h, x0 + h) için
f ′(x0) =1
2h[f(x0 + h)− f(x0 − h)]− h2
6f′′′
(c)
Farz edelim ki, f(x0 + h) ve f(x0 − h) ifadeleri sırası ile e(x0 + h) ve e(x0 − h)yuvarlama hataları ile f(x0 + h) ve f(x0 − h) olarak hesaplansın. Dolayısıyla,bu yaklasımda kesme ve yuvarlamadan dolayı olusan toplam hata
f ′(x0) =1
2h
[f(x0 + h) + e(x0 + h)− f(x0 − h)− e(x0 − h)
]− h2
6f′′′
(c)
102

Sayısal Türev (Numerical Differentiation)
=f(x0 + h)− f(x0 − h)
2h+e(x0 + h)− e(x0 − h)
2h− h2
6f′′′
(c)
yani
f ′(x0)− f(x0 + h)− f(x0 − h)
2h=e(x0 + h)− e(x0 − h)
2h− h2
6f′′′
(c)
seklinde elde edilir. Eger e(x0 ± h) yuvarlama hatası bir ε > 0 sayısı ile, ffonksiyonunun üçüncü türevi bir M sayısı ile sınırlı ise∣∣∣∣∣f ′(x0)− f(x0 + h)− f(x0 − h)
2h
∣∣∣∣∣ =ε
h+h2
6M
elde edilir. h2
6 M kesme hatasını minimize etmek için h uzunlugunu azaltmakgerekir. Fakat h degerinin azalması durumunda ε
h ile verilen yuvarlama ha-tası degeri artacaktır. Dolayısıyla, pratikte, olusan yuvarlama hatasının yak-lasıma etkisi göz önüne alındıgında h degerinin çok küçük olması nadirenavantajlı bir durum olarak karsımıza çıkmaktadır.
Örnek 3.0.7 f(x) = sinx fonksiyonu için verilen h degerleri için f ′(0.9) türevine
f ′(0.9) ≈ f(0.9 + h)− f(0.9− h)
2h
merkezi fark formulü kullanılarak yapılan yaklasımlar ve bu yaklasımlar so-nucu gerçek degerin f ′(0.9) = cos 0.9 = 0.62161 olup mutlak hatalar verilmistir.
h f ′(0.9) yaklasım Mutlak hata0.001 0.625 0.00339
0.002 0.6255 0.00089
0.005 0.622 0.00039
0.01 0.6215 0.00011
0.02 0.6215 0.00011
0.05 0.6214 0.00021
0.1 0.62055 0.00106
Hatalara bakıldıgında türev için en iyi yaklasımların h’nin 0.005 ile 0.05 arasın-daki degerleri için olustugu görülmektedir. Diger taraftan yapılan yaklasımdaolusan kesme ve yuvarlama hatalarının
e(h) =ε
h+h2
6M
103

Sayısal Türev (Numerical Differentiation)
oldugunu biliyoruz. Simdi e(h) fonksiyonunun minimum (en küçük) degerini al-dıgı noktayı bulalım:
e′(h) = − ε
h2+h
3M =
Mh3 − 3e
3h2= 0 =⇒ Mh3 − 3ε = 0
oldugundan
h =
(3ε
M
)1/3
noktası e(h) fonksiyonu minimum yapan noktadır. Bununla birlikte
e′′(h) =
2ε
h3+M
3=⇒ e
′′
((3ε
M
)1/3)> 0
sagladıgından ikinci türev teoremine göre h =(
3εM
)1/3 noktasında e(h) minimumdegerini alır. Ayrıca M sayısı f fonksiyonunun üçüncü türevi için üst sınır ol-dugundan f(x) = sinx için f
′′′(x) = cosx dir. Buradan
M = maxx∈[0.8,1]
|f ′′′(x)| = maxx∈[0.8,1]
| cosx| = cos 0.8 = 0.69671
Yuvarlama aritmetigi ile k ondalık basamak kullanılarak yapılan bir yakla-sımda olusacak hata için bir sınır 5x10−k−1 seklinde verildiginden, 5 ondalıkbasamak kullanılarak hesaplanan f degerlerinin yuvarlama hatası için bir sı-nır ε = 5x10−6 olarak elde edilir.
Yukarda hesaplanan M ve ε degerleri h ifadesinde yerine yazılırsa(3ε
M
)1/3
=
(3(0.000005)
0.69671
)1/3
≈ 0.028
elde edilir. Buna göre h = 0.028 seçilmesi durumunda en uygun yaklasımınyapılacagı sonucuna ulasılır.
Alıstırmalar
(1) h = 0.1 ve h = 0.05 alarak ileri fark, geri fark ve merkezi fark formülleriyardımıyla x0 = 1.5 noktasında f(x) = 4xex fonksiyonunun türev dege-rine yaklasımlarını bulunuz. Her bir h degeri için olusan rölatif hatayüzdesi hesaplayınız. Hangi yöntemle ve hangi h degeriyle en iyi sonuçelde edilmistir.
C: Gerçek türev f ′(x) = 4ex + 4exx, f ′(1.5) = 44.817
104

Sayısal Türev (Numerical Differentiation)
h = 0.1 için
Ileri fark: f ′(1.5) ≈ 48.093, εr = %7.3Geri fark: f ′(1.5) ≈ 41.810, εr = %6.7
Merkezi fark: f ′(1.5) ≈ 44.951, εr = %0.3
h = 0.05 için
Ileri fark: f ′(1.5) ≈ 46.42, εr = %3.5Geri fark: f ′(1.5) ≈ 43.282, εr = %3.4
Merkezi fark: f ′(1.5) ≈ 44.850, εr = %0.07
En iyi sonuç h = 0.05 ve merkezi fark formulü ile elde edilmistir.
(2) h = 0.05 alarak x0 = 1.5 noktasında f(x) = 4xex fonksiyonunun ikincimertebeden türev degerine yaklasım bulunuz. Gerçek ikinci mertebe tü-revi bulunuz. Yaklasımdaki rölatif hata yüzdesini bulunuz.
C: Gerçek türev f′′(x) = 4ex(1+x)+4ex, f
′′(1.5) = 62.744. f
′′(1.5) ≈ 62.764, εr =
%0.0319
(3) Bir roketin zamana baglı olarak aldıgı mesafeler asagıdaki tabloda veril-mistir. Roketin t = 4 saniyedeki hızını ileri fark, geri fark, merkezi farkformülleri yardımıyla hesaplayınız. Roketin t = 4 saniyedeki ivmesinibulunuz.
t (sn) 0 1 2 3 4 5y(t) (m) 0 3 9 15 40 60
Roketin aldıgı mesafenin fonksiyonu
y(t) = −0.55t5 + 6.33t4 − 24.96t3 + 40.17t2 − 18t
olarak verilmis ise t = 4 saniyedeki gerçek hızını ve ivmesini bulunuz.(Sayısal) Yaklasık hız ve ivme degerlerindeki rölatif hata yüzdesini he-saplayınız. Hangi yöntemle hız için en iyi sonuç elde edilmistir?
C: Gerçek hız= 21.76 m/s, Gerçek ivme=−5m/s2
Sayısal hız degerleri ve hatalar: Ileri fark- 20 m/s, εr = %8.08, Geri fark-25 m/s, εr = %14.88, Merkezi fark-22.5 m/s, εr = %3.4 Merkezi fark ile eniyi sonuç elde edilmistir. Sayısal ivme- −5m/s2, εr = %0
(4) f(x) = sinx, a = 0.5 olsun. f(x) fonksiyonunun a = 0.5 noktasındakisayısal türevini ileri fark formülü ile hesaplarsak olusan mutlak hatayıh = 10−k, k = 1, 2, · · · , 6 ve h = 10−k, k = 7, 8, · · · , 17 degerleri için bulunuz.Hangi h degerinden sonra mutlak hata artmaktadır? Toplam hata için
|et| ≤h
2M1 +
2ε∗
hM2, ε
∗ ≤ 6x10−6
105

Sayısal Türev (Numerical Differentiation)
buradaM1 = max
x∈[a,a+h]|f ′′(a)|,M2 = max
x∈[a,a+h]|f(a)|
formüllerini kullanarak h’nin hangi seçiminde en uygun yaklasımın ola-cagını bulunuz.
C: Gerçek türev f ′(x) = cosx, cos(0.5) = 0.87758256 olmaktadır.
h = 10−k, k = 1, 2, · · · , 6 için mutlak hatalar
h Mutlak hata10−1 2.5x10−2
10−2 2.4x10−3
10−3 2.4x10−4
10−4 2.4x10−5
10−5 2.4x10−6
10−6 2.4x10−7
h = 10−k, k = 7, 8, · · · , 17 için mutlak hatalar
h Mutlak hata10−7 2.5x10−8
10−8 2.9x10−10
10−9 2.9x10−10
10−11 1.2x10−6
10−14 5.1x10−4
10−15 11x10−2
10−16 2.3x10−1
10−17 8.8x10−1
h∗ ≈ 1.7x10−8 için en uygun degerdir. olur. Ikinci tablodan da görüldügügibi h degeri 10−8’den küçük degerler için hata artmıstır.
106

4 Sayısal Integral (NumericalIntegration)
Integral, fiziksel degiskenlerin toplamının belirlenmesinde kullanılabildigi gibibir alanın veya hacmin hesaplanmasında, türev ve hız denklemlerinin çözüm-lenmesinde de kullanılmaktadır. Özellikle fonksiyonların sadece ayrık nokta-larda tanımlı olması durumunda veya analitik olarak integrallerin hesaplan-masının zor ya da mümkün olmadıgı durumlarda sayısal integral yöntemlerikullanılmaktdır. Örnegin,
I(x) =
∫ x
0
t3
et − 1dt
integrali katı bir maddenin ısı kapasitesini verir ancak integralin analitik ifa-desi yoktur. Bu integrale sayısal integral yöntemleri ile yaklasık degerler bul-mak mümkündür. Benzer sekilde
∫ 10 e
x2dx veya∫ π
0 cos(x2)dx integralleri anali-tik olarak bulunamaz. Çünkü antitürev fonskiyonları yoktur. Yani türevi ex
2
ve cos(x2) olan analitik bir fonksiyon bulunamaz. Bu integral degerleri içinsayısal integral yöntemleri ile yaklasık degerler bulunabilir.
∫ b
af(x)dx
integral degeri f(x) ≥ 0 ise fonksiyonun x ∈ [a, b] aralıgı için altında ka-lan alanı verir. Fonksiyon negatifse, integralin mutlak degeri fonksiyonunx-ekseni ile sınırlandırdıgı alanı verir. Belirli bir aralık için fonksiyon x ekse-ninin altında ise integral degeri negatif olur. Toplam integralin degeri bize netalanı verir.
Sayısal integral için temel yöntemler asagıdaki basit fikre dayanır:
(a) f(x) fonksiyonuna [a, b] aralıgı için herhangi bir polinom p(x) yaklasımıyapın. Örnegin, Lagrange interpolasyon polinomu (Lagrange interpola-tion polynomial).
(b) [a, b] aralıgında polinomun integralini alın.
I =
∫ b
af(x)dx ≈
∫ b
ap(x)dx
107

Sayısal Integral (Numerical Integration)
∫ ba f(x)dx integral degerine yapılan en temel yaklasım
∑ni=0 cif(xi) toplamı ile
elde edilen sayısal alan hesabı metodur.
Tanım 4.0.1 (Interpolasyon Polinomu)
m+ 1 tane (xi, yi) verisi verilmis olsun.
p(xi) = yi, i = 0, 1, · · · ,m
olacak sekilde mümkün olan en küçük dereceden bir p(x) polinomuna interpo-lasyon polinomu denir.
Interpolasyon polinomu tektir.
Teorem 4.0.1 Eger x0, x1, x2, · · · , xm farklı reel sayılar ise, bu durumda keyfiy0, y1, · · · , ym sayıları için
pn(xi) = yi, i = 0, 1, · · · ,m
olacak sekilde derecesi en fazla m olan tek bir pn polinomu vardır.
Bu durumda f(x) fonksiyonu ve x0 noktası için 0. dereceden interpolasyonpolinomu
p0(x) = f(x0)
olur.
f(x) fonksiyonu ve x0, x1 noktaları için 1. dereceden interpolasyon polinomu
p1(x0) = f(x0), p1(x1) = f(x1)
saglayan
p1(x) = f(x0) +f(x1)− f(x0)
x1 − x0(x− x0)
polinomu olur.
Genel durumda Lagrange interpolasyon polinomlarına bakalım. Sayısal in-tegral yöntemleri temel olarak Lagrange interpolasyon polinomu yaklasımın-dan elde edilir.
Tanım 4.0.2 (Lagrange Interpolasyon Polinomu)
[a, b] aralıgında {x0, x1, · · · , xm} gibi m + 1 tane farklı nokta verilsin. Buna göref(x) fonksiyonunu bu m+ 1 noktada kesen m. dereceden Lagrange interpolas-yon polinomu Lk(x) su sekilde tanımlıdır:
Lk(x) =(x− x0)(x− x1) · · · (x− xk−1)(x− xk+1) · · · (x− xm)
(xk − x0)(xk − x1) · · · (xk − xk−1)(xk − xk+1) · · · (xk − xm)
108

Sayısal Integral (Numerical Integration)
Yani,
Lk(x) =m∏
i=0,i 6=k
(x− xi)(xk − xi)
seklinde tanımlıdır. m. dereceden Lagrange interpolasyon polinomunun hataterimi
Rm(x) =
m∏i=0
f (m+1)(ξ)
(m+ 1)!(x− xi) =
f (m+1)(ξ)
(m+ 1)!(x− x0)(x− x1) · · · (x− xm)
ile verilir. Bu durumda f(x) fonksiyonu
f(x) = Pm(x) +Rm(x) =m∑i=0
f(xi)Li(x) +m∏i=0
(x− xi)f (m+1)(ξ)
(m+ 1)!(4.1)
olur. Burada ξ sayısı {x0, x1, · · · , xm} noktaları arasında bir sabittir.
4.1 ifadesinin her iki tarafının a’dan b’ye integrali alınırsa ci =∫ ba Li(x)dx ola-
rak tanımlanmak üzere∫ b
af(x)dx =
∫ b
a
m∑i=0
f(xi)Li(x)dx+
∫ b
a
m∏i=0
(x− xi)f (m+1)(ξ)
(m+ 1)!dx
=
m∑i=0
cif(xi) +1
(m+ 1)!
∫ b
a
m∏i=0
(x− xi)f (m+1)(ξ)dx
esitligi elde edilir. Bu integral hesabında olusan hata
E(f) =1
(m+ 1)!
∫ b
a
m∏i=0
(x− xi)f (m+1)(ξ)dx
ihmal edildiginde integral için∫ b
af(x)dx ≈
m∑i=0
cif(xi)
yaklasımı bulunmus olur.
Sayısal integral yöntemleri olarak
(a) Dikdörtgen Kuralı, sıfırıncı (sabit polinom) dereceden polinom
(b) Orta Nokta Kuralı, sıfırıncı (sabit polinom) dereceden polinom
(c) Yamuk Kuralı, birinci dereceden polinom
(d) Simpson 13 kuralı, ikinci dereceden polinom
(e) Simpson 38 kuralı, üçüncü dereceden polinom
kullanılır.
109

Sayısal Integral (Numerical Integration)
4.0.1 Dikdörtgen Kuralı (Rectangle Rule)
Bu yöntemde f(x) fonksiyonunu [a, b] aralıgında sıfırıncı dereceden bir po-linom (sabit polinom, m = 0 dereceden) ile yaklasım yapılır. Bu polinomp(x) = f(a) alınırsa Sol Dikdörtgen kuralı, p(x) = f(b) alınırsa Sag Dikdört-gen kuralı olur. Bu bölümde islemler sol dikdörtgen kuralına göre yapılacak-tır, sag dikdörtgen kuralı için islemler benzerdir. Burada p(x) = f(a) alalım.Yani f(x) ≈ p(x) = f(a) alalım. Sekil 4.1’de Dikdörtgen kuralı gösterilmistir.Dikdörtgenin alanı f(x) fonksiyonunun [a, b] aralıgı altında kalan alanına biryaklasımdır.
𝒃 𝒂
𝐴 =
𝜋𝑟2
x
y
𝒇(𝒙)
𝒇(𝒂)
Sekil 4.1: Dikdörtgen kuralı
Yani, ∫ b
af(x)dx ≈
∫ b
ap(x)dx =
∫ b
af(a)dx = f(a)(b− a)
olur. Yani, Dikdörtgen kuralında∫ b
af(x)dx ≈ f(a)(b− a)
yaklasımı elde edilir.
Burada f(a)(b−a) degeri Sekil 4.1 de verilen dikdörtgenin alanıdır. Yani, Dik-dörtgen kuralı ile elde edilmis yaklasık integral degeridir.
110

Sayısal Integral (Numerical Integration)
Örnek 4.0.1 f(x) = 1x fonksiyonunun [1, 1.2] aralıgındaki integraline yaklasımı
sol Dikdörtgen kuralı ile bulalım. Integralin gerçek degerini bulup mutlak hatayıhesaplayalım. ∫ 1.2
1
1
xdx ≈ f(1)(1.2− 1) = 1(0.2) = 0.2
Gerçek deger: ∫ 1.2
1
1
xdx = lnx
∣∣1.21 = ln(1.2)− ln 1 = 0.1823
olmaktadır. Yaklasımdaki mutlak hata
εm = |0.1823− 0.2| = 0.0177
olur.
Bilesik Dikdörtgen Kuralı (Composite Rectangle Rule)Bu bölümde Sol Dikdörtgen kuralının uygulamasına bakalım. [a, b] aralıgınıesit uzunlukta n tane alt aralıga bölelim. Bu aralıklar
a = x0, xn = b
olmak üzere[x0, x1], [x1, x2], [x2, x3], · · · , [xn−1, xn]
olsun. Her bir alt aralıkta dikdörtgen kuralını uygulayarak yaklasık alanıbulalım. Sekil 4.2 de bu durum gösterilmistir. Taralı dikdörtgenlerin alan-ları toplamı f(x) fonksiyonunun altında kalan alana bir yaklasım verir. Budurumda yaklasık alan her bir küçük dikdörtgenin alanları toplamı olur.
∆x =xn − x0
n
olmak üzere∫ xnx0
f(x)dx =∫ x1x0f(x)dx+
∫ x2x1f(x)dx+ · · ·+
∫ xnxn−1
f(x)dx
≈ ∆xf(x0) + ∆xf(x1) + · · ·+ ∆xf(xn−1)= ∆x [f(x0) + f(x1) + · · ·+ f(xn−1)]
= ∆x∑n−1
i=0 f(xi)
olur.Bilesik Dikdörtgen Kuralı:
∆x =xn − x0
nolmak üzere ∫ xn
x0
f(x)dx ≈ ∆x
n−1∑i=0
f(xi)
yaklasımı elde edilir.
111
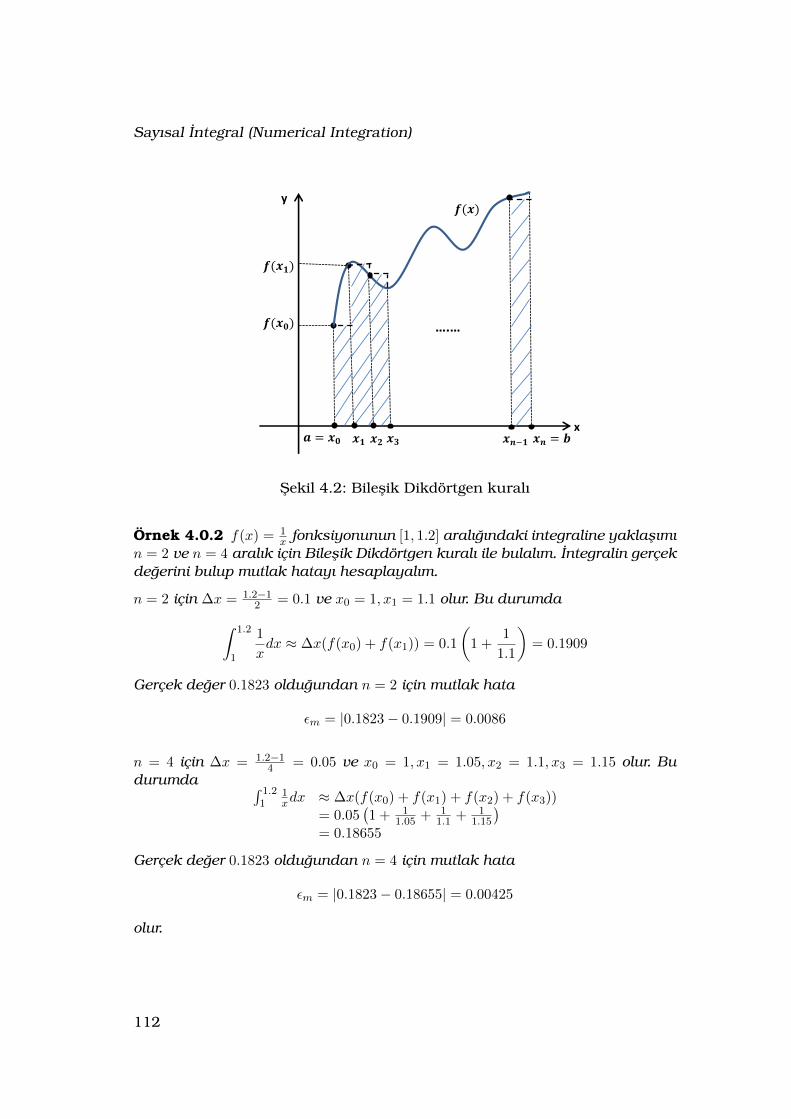
Sayısal Integral (Numerical Integration)
𝒙𝒏−𝟏 𝒙𝟏 𝒂 = 𝒙𝟎
….…
x
y 𝒇(𝒙)
𝒙𝟐 𝒙𝟑 𝒙𝒏 = 𝒃
𝒇(𝒙𝟎)
𝒇(𝒙𝟏)
Sekil 4.2: Bilesik Dikdörtgen kuralı
Örnek 4.0.2 f(x) = 1x fonksiyonunun [1, 1.2] aralıgındaki integraline yaklasımı
n = 2 ve n = 4 aralık için Bilesik Dikdörtgen kuralı ile bulalım. Integralin gerçekdegerini bulup mutlak hatayı hesaplayalım.
n = 2 için ∆x = 1.2−12 = 0.1 ve x0 = 1, x1 = 1.1 olur. Bu durumda∫ 1.2
1
1
xdx ≈ ∆x(f(x0) + f(x1)) = 0.1
(1 +
1
1.1
)= 0.1909
Gerçek deger 0.1823 oldugundan n = 2 için mutlak hata
εm = |0.1823− 0.1909| = 0.0086
n = 4 için ∆x = 1.2−14 = 0.05 ve x0 = 1, x1 = 1.05, x2 = 1.1, x3 = 1.15 olur. Bu
durumda ∫ 1.21
1xdx ≈ ∆x(f(x0) + f(x1) + f(x2) + f(x3))
= 0.05(1 + 1
1.05 + 11.1 + 1
1.15
)= 0.18655
Gerçek deger 0.1823 oldugundan n = 4 için mutlak hata
εm = |0.1823− 0.18655| = 0.00425
olur.
112

Sayısal Integral (Numerical Integration)
Sayısal Integral Hata Analizi
Bütün sayısal integral formülleri için hata polinom interpolasyonu için hata-dan elde edilir. Polinom interpolasyonu için olan formül kullanılarak hatanınformu bulunur. Genel olarak sayısal integral yöntemlerinde hata
Ekural = I − Ikural=∫ ba f(x)dx−
∫ ba p(x)dx
=∫ ba [f(x)− p(x)]dx
gibi olur. (m+ 1) tane noktadaki Lagrange interpolasyon polinomunun hatası
f(x)− p(x) =1
(m+ 1)!
m∏i=0
(x− xi)f (m+1)(ξ)dx
burada ξ ∈ [x0, xm]. Bu durumda
Ekural = 1(m+1)!
∫ ba
∏mi=0(x− xi)f (m+1)(ξ)dx
= f (m+1)(ξ)(m+1)!
∫ ba
∏mi=0(x− xi)dx
burada eger
w(x) =
m∏i=0
(x− xi) = (x− x0)(x− x1) · · · (x− xm)
dersek hata
Ekural =f (m+1)(ξ)
(m+ 1)!
∫ b
aw(x)dx
integrali ile hesaplanır. Burada iki durumu incelemek gerekir:
(1) w(x) fonksiyonu, [a, b] aralıgında w(x) ≥ 0 veya w(x) ≤ 0 olması.
(2)∫ ba w(x)dx = 0
Dikdörtgen Kuralı Hata Analizi
Dikdörtgen kuralındaw(x) = x− a
oldugundan ve bu fonksiyon [a, b] aralıgında daima pozitif oldugundan biraralık için Dikdörtgen kuralının hatası m+1 = 1 oldugundan (w(x) polinomu-nun derecesi)
Ed = f (m+1)(ξ)(m+1)!
∫ ba w(x)dx
= f ′(ξ)∫ ba w(x)dx = f ′(ξ)
2 (b− a)2
113

Sayısal Integral (Numerical Integration)
olur. Yani, n = 1 aralık için∫ ba f(x)dx integralinin hesabı için ξ ∈ [a, b] olmak
üzere Dikdörtgen kuralının hatası
Ed =f ′(ξ)
2(b− a)2
ile verilir.
Genel n aralıgı için Dikdörtgen Kuralının Hatası ise tek bir aralık için olanhata formulü kullanılarak
Ed =f ′(ξ)
2n(b− a)2
olarak elde edilir. Aralık genisligi azaldıkça, yani n arttıkça hata aynı hızdaazalır. Negatif hata yöntemin integrali abartarak tahmin ettigi anlamına gel-mektedir.
Bu durumda Dikdörtgen Kuralında hata için üst sınır
|Ed| ≤K(b− a)2
2n, |f ′(x)| ≤ K,x ∈ [a, b]
olarak bulunur.
Hata için üst sınırı kullanarak istenen dogrulukta integral yaklasımı bulmakiçin gerekli aralık sayısı bulunabilir. Asagıda bunu bir örnekle açıklayalım.
Örnek 4.0.3∫ 1
0 x4dx integralini 0.001 dogrulukla Dikdörtgen kuralı ile hesap-
layabilmek için gerekli aralık sayısını bulunuz.
|Ed| ≤K(b− a)2
2n, |f ′(x)| ≤ K,x ∈ [a, b]
Soruda f(x) = x4, f ′(x) = 4x3 olur. f′(x) fonksiyonunun [0, 1] aralıgındaki en
büyük degeri x = 1’de olur. |f ′(1)| = 4 olur. Yani K = 4 olmaktadır.
|f ′(x)| ≤ K = 4
olur. Bu durumda|Ed| ≤
K(b−a)2
2n
= 4(1−0)2
2n ≤ 10−3
=⇒ 2n ≤ 10−3
=⇒ 2.103 ≤ n
Bu durumda Dikdörtgen kuralı ile istenen dogrulukta sonuç elde edebilmek içinn = 2000 aralık kullanılmalı.
114

Sayısal Integral (Numerical Integration)
4.0.2 Orta Nokta Kuralı (Midpoint Rule)
Bu yöntemde de yine [a, b] aralıgında f(x) fonksiyonuna sabit polinomla yak-lasım yapılır. Fakat bu sefer aralıgın orta noktası kullanılır. Yani, interpolas-yon polinomu
p(x) = f
(a+ b
2
)olarak alınır. Bu durumda∫ b
af(x)dx ≈
∫ b
ap(x)dx =
∫ b
af
(a+ b
2
)dx = f
(a+ b
2
)(b− a)
Yani, ∫ b
af(x)dx ≈ f
(a+ b
2
)(b− a)
yaklasımı elde edilir.Sekil 4.3 bir aralık için Orta Nokta kuralı ile yaklasım gösterilmistir. Burada[a, b] aralıgının orta noktasındaki fonksiyon degeri dikdörtgenin uzun kenarıolmaktadır. Taralı dikdörtgenin alanı f(x) fonksiyonunun altında kalan alanabir yaklasım olmaktadır.
𝒃 𝒂
𝐴 =
𝜋𝑟2
x
y
𝒇(𝒙)
𝒇 𝒂 + 𝒃
𝟐
𝒂+ 𝒃
𝟐
Sekil 4.3: Orta Nokta kuralı
Örnek 4.0.4 f(x) = 1x fonksiyonunun [1, 1.2] aralıgındaki integraline yaklasımı
Orta Nokta kuralı ile bulalım. Integralin gerçek degerini bulup mutlak hatayıhesaplayalım.
115

Sayısal Integral (Numerical Integration)
[1, 1.2] aralıgının orta noktası 1.1 noktasıdır. Bu durumda, integral için yaklasım
∫ 1.2
1
1
xdx ≈ f(1.1)(1.2− 1) =
1
1.1(0.2) = 0.18181
Gerçek deger: ∫ 1.2
1
1
xdx = lnx
∣∣1.21 = ln(1.2)− ln 1 = 0.1823
olmaktadır. Yaklasımdaki mutlak hata
εm = |0.1823− 0.18181| = 5x10−4
olur.
Bilesik Orta Nokta Kuralı (Composite MidPoint Rule)
Bu bölümde Orta nokta kuralının uygulamasına bakalım. [a, b] aralıgını esituzunlukta n tane alt aralıga bölelim. Bu aralıklar
a = x0, xn = b
olmak üzere[x0, x1], [x1, x2], [x2, x3], · · · , [xn−1, xn]
olsun. Her bir alt aralıkta Orta Nokta kuralını uygulayarak yaklasık alanıbulalım. Sekil 4.4 de bu durum gösterilmistir. Taralı dikdörtgenlerin alanlartoplamı f(x) fonksiyonunun altında kalan alanına bir yaklasım verir. Buradaher bir aralıkta orta noktadaki fonksiyon degeri dikdörtgenlerin uzun kenarıolmaktadır.
∆x =xn − x0
nve
[x0, x1], [x1, x2], [x2, x3], · · · , [xn−1, xn]
aralıklarının orta noktaları sırasıyla
x∗1, x∗2, · · · , x∗n
noktaları olsun. Bu durumda∫ xnx0
f(x)dx =∫ x1x0f(x)dx+
∫ x2x1f(x)dx+ · · ·+
∫ xnxn−1
f(x)dx
≈ ∆xf(x∗1) + ∆xf(x∗2) + · · ·+ ∆xf(x∗n)= ∆x [f(x∗1) + f(x∗2) + · · ·+ f(x∗n)]= ∆x
∑ni=1 f(x∗i )
olur.
116

Sayısal Integral (Numerical Integration)
𝒙𝒏∗ 𝒙𝟏
∗ 𝒙𝟐∗
….…
x
y 𝒇(𝒙)
𝒙𝟑∗
Sekil 4.4: Bilesik Orta Nokta kuralı
Bilesik Orta Nokta Kuralı (Composite Midpoint Rule)
∆x =xn − x0
n
ve x∗i , i = 1, 2, · · · , n noktaları [xi−1, xi], i = 1, 2, · · · , n aralıgının orta noktalarıolmak üzere ∫ xn
x0
f(x)dx ≈ ∆xn∑i=1
f(x∗i )
yaklasımı elde edilir.
Örnek 4.0.5∫ 1
0 x2dx integrali için n = 1, 2, 3, 4, 5 için Orta Nokta kuralı ile yak-
lasım yapalım. Gerçek integral degerini bulup her bir n için rölatif hata yüzde-sini hesaplayalım.
Gerçek integral degeri ∫ 1
0x2dx =
x3
3
∣∣∣∣x=1x=0 =
1
3= 0.3333
olur.
n = 1 için x0 = 0, x1 = 1, ∆x = 1−01 = 1, orta nokta x∗1 = 0+1
2 = 0.5 olur. Budurumda ∫ 1
0x2dx ≈ f(0.5)(1− 0) = (0.5)2 = 0.25
117

Sayısal Integral (Numerical Integration)
olur. Rölatif hata yüzdesi εr = |0.3333−0.25||0.3333| x100 = %25 olur.
n = 2 için ∆x = 1−02 = 0.5, x0 = 0, x1 = 0.5, x2 = 1 olur. [0, 0.5] aralıgının orta
noktası x∗1 = 0.25, [0.5, 1] aralıgının orta noktası x∗2 = 0.75 olur. Bu durumda∫ 1
0x2dx ≈ (0.5)(f(0.25) + f(0.75)) = (0.5)((0.25)2 + (0.75)2) = 0.3125
olur. Rölatif hata yüzdesi εr = |0.3333−0.3125||0.3333| x100 = %6.25 olur. Hata azalmıstır.
n = 3 için ∆x = 1−03 = 1
3 , x0 = 0, x1 = 13 , x2 = 2
3 , x3 = 1 olur. [0, 13 ] aralıgının orta
noktası x∗1 = 16 , [1
3 ,23 ] aralıgının orta noktası x∗2 = 3
6 , [23 , 1] aralıgının orta noktası
x∗3 = 56 olur. Bu durumda∫ 1
0x2dx ≈
(1
3
)(f
(1
6
)+ f
(3
6
)+ f
(5
6
))=
(1
3
)((1
6
)2
+
(3
6
)2
+
(5
6
)2)
= 0.3247
olur. Rölatif hata yüzdesi εr = |0.3333−0.3247||0.3333| x100 = %2.78 olur. Hata azalmıstır.
Benzer sekilde n = 4 için∫ 1
0x2dx ≈ 0.328125, εr = %1.56
ve n = 5 için ∫ 1
0x2dx ≈ 0.33, εr = %0.9
olarak elde edilir. Aralık sayısı n arttıkça hatanın azaldıgı görülür.
Orta Nokta Kuralı Hata Analizi∫ ba f(x)dx integralinin yaklasımını bulurken Orta Nokta kuralı için
w(x) = x− a+ b
2
olur. Bu fonksiyon sol taraf için negatif degerler alır.∫ b
aw(x)dx =
(x− a+b
2
)22
|ba = 0
oldugundan diger noktayı ekleyerek ve interpolasyon polinomunun altındakalan alanı degistirmeyerek
w(x) =
(x− a+ b
2
)(x− a+ b
2
)
118

Sayısal Integral (Numerical Integration)
olarak alıyoruz. Bu durumda [a, b] aralıgında w(x) ≥ 0 olur ve hata analizi içinolan (1.) durumu kullanabiliriz.
Eo = f′′
(ξ)2
∫ ba w(x)dx
= f′′
(ξ)2
∫ ba
(x− a+b
2
)2dx
= f′′
(ξ)2
(x−a+b2 )
3
3 |ba= f
′′(ξ)2
( b−a2 )
3−(a−b2 )
3
3
= f′′
(ξ)2
2(b−a)3
24
= f′′
(ξ)24 (b− a)3
olur.
Genel n aralık sayısı için (Bilesik) Orta Nokta kuralının hatası
Eo =f′′(ξ)
24n2(b− a)3
olur.
Bu durumda Orta Nokta Kuralında hata için üst sınır
|Eo| ≤K(b− a)3
24n2, |f ′′(x)| ≤ K,x ∈ [a, b]
olur.
Hata için üst sınırı kullanarak istenen dogrulukta integral yaklasımı bulmakiçin gerekli aralık sayısı bulunabilir. Asagıda bunu bir örnekle açıklayalım.
Örnek 4.0.6∫ 1
0 x4dx integralini 0.00001 dogrulukla Orta Nokta kuralı ile hesap-
layabilmek için gerekli aralık sayısını bulunuz.
|Eo| ≤K(b− a)3
24n2, |f ′′(x)| ≤ K,x ∈ [a, b]
Soruda f(x) = x4, f ′(x) = 4x3, f′′(x) = 12x2 olur. f
′′(x) fonksiyonunun [0, 1] aralı-
gındaki en büyük degeri x = 1’de olur. |f ′′(1)| = 12 olur. Yani K = 12 olmaktadır.
|f ′′(x)| ≤ K = 12
olur. Bu durumda|Eo| ≤ K(b−a)3
24n2
= 12(1−0)3
24n2 ≤ 10−5
=⇒ 12n2 ≤ 10−5
=⇒ 1 ≤ 2n2(10−5)=⇒ 105 ≤ 2n2
=⇒ 50000 ≤ n2
=⇒ 223.606 ≤ n
119

Sayısal Integral (Numerical Integration)
Bu durumda Orta nokta kuralı ile istenen dogrulukta sonuç elde edebilmek içinn = 224 aralık kullanılmalı.
Aynı integrali 0.001 = 10−3 dogrulukla hesaplayabilmek için Orta Nokta kuralıile n = 23 aralık kullanmak gereklidir. Ancak Dikdörtgen kuralı ile hesapla-yabilmek için n = 2000 aralık gerektigini bulmustuk (Örnek 4.0.3). Yani, aynıdogruluga Orta nokta kuralı ile daha az aralık sayısı ile ulasılmaktadır.
Hata için üst sınır ve gerçek hatayı karsılastıralım.
Örnek 4.0.7∫ 4
2 x3dx integralini n = 4 aralık ile Orta Nokta yaklasımı yapıldı-
gında ∫ 4
2x3dx ≈ 59.625
bulunur. Gerçek integral degeri ∫ 4
2x3dx = 60
olur. Mutlak hata εm = 0.375 olmaktadır. Hata için üst sınır
|Eo| ≤K(b− a)3
24n2, |f ′′(x)| ≤ K,x ∈ [a, b]
Soruda f(x) = x3, f ′(x) = 3x2, f′′(x) = 6x olur. f
′′(x) fonksiyonunun [2, 4] aralı-
gındaki en büyük degeri x = 4’de olur. |f ′′(4)| = 24 olur. Yani K = 24 olmaktadır.
|f ′′(x)| ≤ K = 24
olur.|Eo| ≤ K(b−a)3
24n2
= 24(4−2)3
24(42)= 0.5
olur. Hata 0.5 den büyük olamaz. Gerçek hata 0.375 dir. Bu durumda
|E| = |Gerçek deger-Yaklasık deger| ≤ 0.5−0.5 ≤ |Gerçek deger-Yaklasık deger| ≤ 0.5
59.125 ≤ Gerçek deger ≤ 60.125
olarak bulunur. Gerçek integral degeri 60 oldugundan, bu aralık içinde yer al-maktadır. Hata için üst sınır kullanılarak Gerçek deger için bir aralık elde edi-lebilmektedir.
120

Sayısal Integral (Numerical Integration)
4.0.3 Yamuk Kuralı (Trapezoid Rule)
Bu yöntemde interpolasyon polinomu lineer (birinci dereceden) polinomdur.[a, b] aralıgında f(a) ve f(b) noktalarından geçen birinci derecden interpolas-yon polinomu kullanılır.
(a, f(a)), (b, f(b)) noktalarından geçen birinci dereceden interpolasyon poli-nomu
p(x) = f(a) + (x− a)f(b)− f(a)
b− aolmaktadır. ∫ b
a p(x)dx =∫ ba
[f(a) + (x− a)f(b)−f(a)
b−a
]dx
= f(a)(b− a) + f(b)−f(a)2 (b− a)
= b−a2 [f(a) + f(b)]
olur. Yani, ∫ b
af(x)dx ≈ b− a
2[f(a) + f(b)]
Eger ∆x = b− a ise ∫ b
af(x)dx ≈ ∆x
2[f(a) + f(b)]
olur.
Sekil 4.5 de bir aralık için Yamuk kuralı gösterilmistir. Taralı yamugun alanı[a, b] aralıgında f(x) fonksiyonunun altında kalan alana bir yaklasım vermek-tedir.
Örnek 4.0.8 f(x) = 1x fonksiyonunun [1, 1.2] aralıgındaki integraline yaklasımı
Yamuk kuralı ile bulalım. Integralin gerçek degerini bulup mutlak hatayı hesap-layalım.
∆x = 1.2− 1 = 0.2 olur.∫ 1.2
1
1
xdx ≈ ∆x
2[f(1) + f(1.2)] =
0.2
2
(1 +
1
1.2
)= 0.18333
Gerçek deger: ∫ 1.2
1
1
xdx = lnx
∣∣1.21 = ln(1.2)− ln 1 = 0.1823
olmaktadır. Yaklasımdaki mutlak hata
εm = |0.1823− 0.1833| = 0.001
olur.
121

Sayısal Integral (Numerical Integration)
𝒃 𝒂 x
y
𝒇(𝒙)
𝒇(𝒂)
𝒇(𝒃)
𝒇(𝒃) − 𝒇(𝒂)
Sekil 4.5: Yamuk kuralı
Bilesik Yamuk Kuralı (Composite Trapezoid Rule)∫ xnx0
f(x)dx integrali için, genel n için Yamuk kuralını elde edelim. [a, b] aralıgıesit uzunlukta n tane aralıga bölünür. Aralıklar
[x0, x1], [x1, x2], · · · , [xn−1, xn]
olsun. Her alt aralıkta Yamuk kuralı uygulanır. Bu durumda
∆x =xn − x0
n
olmak üzere∫ xnx0
f(x)dx =∫ x1x0f(x)dx+
∫ x2x1f(x)dx+ · · ·+
∫ xnxn−1
f(x)dx
≈ ∆x2 [f(x0) + f(x1)] + ∆x
2 [f(x1) + f(x2)] + ∆x2 [f(x2) + f(x3)]
+ · · ·+ ∆x2 [f(xn−1) + f(xn)]
= ∆x2 [f(x0) + 2f(x1) + · · ·+ 2f(xn−1) + f(xn)]
= ∆x2
[f(x0) + 2
∑n−1i=1 f(xi) + f(xn)
]Yani, Bilesik Yamuk Kuralı
∆x =xn − x0
n
vexi+1 = xi + ∆x, i = 0, 1, 2, · · · , n− 1
122

Sayısal Integral (Numerical Integration)
(veya xi = x0 + i∆x, i = 1, 2, · · · , n) olmak üzere∫ xn
x0
f(x)dx ≈ ∆x
2
[f(x0) + 2
n−1∑i=1
f(xi) + f(xn)
]olarak yazılabilir.
Sekil 4.6 da Bilesik Yamuk kuralı gösterilmistir. [x0, xn] aralıgında f(x) fonksi-yonunun altında kalan alana, taralı yamukların alanları toplamı ile yaklasımyapılmıstır.
𝒙𝒏−𝟏 𝒙𝟏 𝒂 = 𝒙𝟎
….…
x
y 𝒇(𝒙)
𝒙𝟐 𝒙𝟑 𝒙𝒏 = 𝒃
Sekil 4.6: Bilesik Yamuk kuralı
Örnek 4.0.9 f(x) = sinx fonksiyonunun [0, π] aralıgındaki integraline yakla-sımı n = 4 aralık kullanarak Yamuk kuralı ile bulalım. Integralin gerçek dege-rini bulup mutlak hatayı hesaplayalım.
∆x = π−04 = π
4 olur. Bu durumda noktalar
x0 = 0, x1 =π
4, x2 =
π
2, x3 =
3π
4, x4 = π
olur. ∫ π0 sinxdx ≈ ∆x
2 [f(0) + 2f(π4
)+ 2f
(π2
)+ 2f
(3π4
)+ f(π)]
= π8
[sin 0 + 2 sin
(π4
)+ 2 sin
(π2
)+ 2 sin
(3π4
)+ sinπ
]= π
8
[0 + 2
√2
2 + 2.1 + 2√
22 + 0
]= π
8
[2√
2 + 2]
= 1.894
123

Sayısal Integral (Numerical Integration)
olarak bulunur.
Gerçek deger:∫ π
0sinxdx = − cosx |π0 = − cosπ + cos 0 = −(−1) + 1 = 2
olmaktadır. Yaklasımdaki mutlak hata
εm = |2− 1.894| = 0.106
olur.
Yamuk Kuralı Hata Analizi
Buradaw(x) = (x− a)(x− b)
olur. [a, b] aralıgında w(x) < 0 olmaktadır. Hata
Ey = f′′
(ξ)2
∫ ba w(x)dx
= f′′
(ξ)2
∫ ba (x− a)(x− b)dx
= f′′
(ξ)2
∫ ba (x2 − bx− ax+ ab)dx
= f′′
(ξ)2−(b−a)3
6
= −f′′
(ξ)12 (b− a)3
Genel n aralık sayısı için (Bilesik) Yamuk kuralının hatası
Ey = −f′′(ξ)
12n2(b− a)3
olur.
Bu durumda Yamuk Kuralında hata için üst sınır
|Ey| ≤K(b− a)3
12n2, |f ′′(x)| ≤ K,x ∈ [a, b]
olur.
Örnek 4.0.10∫ 7
21xdx integralini 5x10−9 dogrulukla Yamuk kuralı ile hesapla-
yabilmek için gerekli aralık sayısını bulunuz.
|Ey| ≤K(b− a)3
12n2, |f ′′(x)| ≤ K,x ∈ [a, b]
124

Sayısal Integral (Numerical Integration)
Soruda f(x) = 1x , f
′(x) = − 1x2, f′′(x) = 2
x3olur. f
′′(x) fonksiyonunun [2, 7] aralı-
gındaki en büyük degeri x = 2’de olur. |f ′′(2)| = 14 olur. Yani K = 1
4 olmaktadır.
|f ′′(x)| ≤ K =1
4
olur. Bu durumda|Ey| ≤ K(b−a)3
12n2
= 14
(7−2)3
12n2 ≤ 5x10−9
=⇒ 12848n2 ≤ 5x10−9
=⇒ 2548109 ≤ n2
=⇒ 22821.77 ≤ nBu durumda Yamuk kuralı ile istenen dogrulukta sonuç elde edebilmek içinn = 22822 aralık kullanılmalı. Adım uzunlugu h = 7−2
22822 = 0.000219086 olur.
4.0.4 Simpson Kuralları (Simpson’s Rules)
Iki tane farklı Simpson kuralı vardır: Simpson 13 Kuralı ve Simpson 3
8 Kuralı.
(a) Simpson 13 Kuralı
Bu yöntemde interpolasyon polinomu kuadratik/karesel (ikinci dereceden)polinomdur. [a, b] aralıgında f(a), f
(a+b
2
)ve f(b) noktalarından geçen 2. dere-
ceden interpolasyon polinomu kullanılır.
x0 = a, x1 = a+b2 , x2 = b olmak üzere
p(x) = c0 + c1(x− x0) + c2(x− x0)(x− x1)
biçiminde olsun. Buradan
p(x0) = f(x0), p(x1) = f(x1), p(x2) = f(x2)
esitlikleri kullanılarakc0 = f(x0)
c1 = f(x1)−f(x0)x1−x0
c2 = f(x2)−2f(x1)+f(x0)2(∆x)2
olur. Burada ∆x = b−a2 ’dir. ∫ b
af(x)dx ≈
∫ b
ap(x)dx
Burada c0, c1, c2 sabitleri yerine yazılarak p(x) polinomunun integrali alındı-gında ∫ b
af(x)dx ≈ ∆x
3[f(x0) + 4f(x1) + f(x2)]
125

Sayısal Integral (Numerical Integration)
olarak bulunur.
Sekil 4.7 de bir aralık için Simpson 13 kuralı gösterilmistir. p(x) polinomunun
altında kalan alan, yani taralı bölgenin alanı [a, b] aralıgında f(x) fonksiyonu-nun altında kalan alana bir yaklasım vermektedir.
𝒙𝟐 = 𝒃 𝒙𝟎 = 𝒂
𝐴 =
𝜋𝑟2
x
y
𝒇(𝒙)
𝒙𝟏
𝒑(𝒙)
Sekil 4.7: Simpson 13 kuralı
Örnek 4.0.11 f(x) = x2 fonksiyonunun [0, 1] aralıgındaki integraline yakla-sımı Simpson 1
3 kuralı ile bulalım. Integralin gerçek degerini bulup mutlak ha-tayı hesaplayalım.
∆x = 1−02 = 0.5 olur.∫ 1
0x2dx ≈ ∆x
3
[f(0) + 4f
(1
2
)+ f(1)
]=
1
6
(02 + 4
(1
2
)2
+ 12
)=
1
3
Gerçek deger: ∫ 1
0x2dx =
1
3x3
∣∣∣∣10 =1
3
olmaktadır. Yaklasımdaki mutlak hata
εm = 0
olur. Simpson 13 kuralı derecesi ≤ 3 olan polinomlarda tam sonuç verir. Çünkü
zaten integrali alınan fonksiyona 2. dereceden polinomla yaklasım yapılmak-tadır.
126

Sayısal Integral (Numerical Integration)
Bilesik Simpson 13 Kuralı∫ xn
x0f(x)dx integrali için, genel n için Simpson 1
3 kuralını elde edelim. [a, b]aralıgı esit uzunlukta n tane aralıga bölünür. Burada n çift sayıdır. Aralıklar
[x0, x2], [x2, x4], · · · , [xn−2, xn]
olsun. Her alt aralıkta Simpson 13 kuralı uygulanır. Bu durumda
∆x =xn − x0
n
olmak üzere∫ xnx0
f(x)dx =∫ x2x0f(x)dx+
∫ x4x2f(x)dx+ · · ·+
∫ xnxn−2
f(x)dx
≈ ∆x3 [f(x0) + 4f(x1) + f(x2)] + ∆x
3 [f(x2) + 4f(x3) + f(x4)]
+∆x3 [f(x4) + 4f(x5) + f(x6)] + · · ·+ ∆x
3 [f(xn−2) + 4f(xn−1) + f(xn)]
= ∆x3 [f(x0) + 4f(x1) + 2f(x2) + 4f(x3) + · · ·+ 2f(xn−2) + 4f(xn−1) + f(xn)]
= ∆x3
[f(x0) + 4
∑n−1i=1,3,5,···(tek) f(xi) + 2
∑n−2i=2,4,6,···(ift) f(xi) + f(xn)
]Yani, Bilesik Simpson 1
3 Kuralı
∆x =xn − x0
n
vexi+1 = xi + ∆x, i = 0, 1, 2, · · · , n− 1
(veya xi = x0 + i∆x, i = 1, 2, · · · , n) olmak üzere∫ xn
x0
f(x)dx ≈ ∆x
3
f(x0) + 4
n−1∑i=1,3,5,···(tek)
f(xi) + 2
n−2∑i=2,4,6,···(cift)
f(xi) + f(xn)
olarak yazılabilir.
Örnek 4.0.12 f(x) = 1 + x3 fonksiyonunun [1, 5] aralıgındaki integraline yak-lasımı n = 4 aralık kullanarak Simpson 1
3 kuralı ile bulalım. Integralin gerçekdegerini bulup mutlak hatayı hesaplayalım.
∆x = 5−14 = 1 olur. Bu durumda
x0 = 1, x1 = 2, x2 = 3, x3 = 4, x4 = 5
olur. ∫ 51 (1 + x3)dx ≈ ∆x
3 [f(x0) + 4f(x1) + 2f(x2) + 4f(x3) + f(x4)]= 1
3 [f(1) + 4f(2) + 2f(3) + 4f(4) + f(5)]= 1
3
[(1 + 13) + 4(1 + 23) + 2(1 + 33) + 4(1 + 43) + (1 + 53)
]= 1
3 [2 + 36 + 56 + 260 + 126] = 160
127

Sayısal Integral (Numerical Integration)
Gerçek deger:∫ 1
0(1 + x3)dx = x+
1
4x4
∣∣∣∣51 =
(5 +
54
4
)−(
1 +1
4
)= 160
olmaktadır. Yaklasımdaki mutlak hata
εm = 0
olur.
Örnek 4.0.13 f(x) = sinx fonksiyonunun [0, π] aralıgındaki integraline yak-lasımı n = 4 aralık kullanarak Simpson 1
3 kuralı ile bulalım. Integralin gerçekdegerini bulup mutlak hatayı hesaplayalım.
∆x = π−04 = π
4 olur. Bu durumda noktalar
x0 = 0, x1 =π
4, x2 =
π
2, x3 =
3π
4, x4 = π
olur. ∫ π0 sinxdx ≈ ∆x
3 [f(0) + 4f(π4
)+ 2f
(π2
)+ 4f
(3π4
)+ f(π)]
= π12
[sin 0 + 4 sin
(π4
)+ 2 sin
(π2
)+ 4 sin
(3π4
)+ sinπ
]= π
12
[0 + 4
√2
2 + 2.1 + 4√
22 + 0
]= π
12
[4√
2 + 2]
= 2.0046
olarak bulunur.
Gerçek deger:∫ π
0sinxdx = − cosx |π0 = − cosπ + cos 0 = −(−1) + 1 = 2
olmaktadır. Yaklasımdaki mutlak hata
εm = |2− 2.0046| = 0.0046
olur. Aynı integral için Örnek 4.0.9’de Yamuk kuralı ile yaklasım yapılmıstır.Simpson 1
3 kuralı ile yapılan yaklasım daha iyidir.
Simpson 13 Kuralı Hata Analizi
Burada∫ ba w(x)dx = 0 oldugundan alanı degistirmeyecek sekilde bir tane daha
interpolasyon noktası eklenir, böylece hata degismez.{a,a+ b
2,a+ b
2, b
}
128

Sayısal Integral (Numerical Integration)
noktalarını alalım.
w(x) = (x− a)
(x− a+ b
2
)2
(x− b)
olur. [a, b] aralıgında w(x) < 0 olmaktadır. Hata n = 1 aralık için
Es = − 1(90)
(b−a
2
)5f (4)(ξ)
=⇒ Es = −f (4)(ξ)2880 (b− a)5
olur. Genel n aralık sayısı için (Bilesik) Simpson 13 kuralının hatası
Es = −f(4)(ξ)
180n4(b− a)5
olur.Bu durumda Simpson 1
3 Kuralında hata için üst sınır
|Es| ≤K(b− a)5
180n4, |f (4)(x)| ≤ K,x ∈ [a, b]
olur.
Örnek 4.0.14∫ 1
0 x4dx integralini 0.00001 dogrulukla Simpson 1
3 kuralı ile he-saplayabilmek için gerekli aralık sayısını bulunuz.
|Es| ≤K(b− a)5
180n4, |f (4)(x)| ≤ K,x ∈ [a, b]
Soruda f(x) = x4, f ′(x) = 4x3, f′′(x) = 12x2, f
′′′(x) = 24x, f (4)(x) = 24 olur.
f (4)(x) = 24 fonksiyonu sabit oldugundan [0, 1] aralıgındaki en büyük degeri24 olur. Yani K = 24 olmaktadır.
|f (4)(x)| ≤ K = 24
olur. Bu durumda|Es| ≤ K(b−a)5
180n4
= 24(1−0)5
180n4 ≤ 10−5
=⇒ 24.105
180 ≤ n4
=⇒ 13333.333 ≤ n4
=⇒ (13333.333)14 ≤ n
=⇒ 10.74 ≤ n
Bu durumda n çift sayı olmak zorunda oldugundan, n = 12 olur. Simpson 13 ku-
ralı ile istenen dogrulukta sonuç elde edebilmek için n = 12 aralık kullanılmalı.Örnek 4.0.6 Orta nokta kuralı ile aynı dogrulukta sonuç elde edebilmek içinn = 224 aralık kullanılması gerektigi bulunmustu. Simpson 1
3 kuralı ile aynıdogruluga çok daha az aralık kullanarak ulasılabilmektedir.
129

Sayısal Integral (Numerical Integration)
(b) Simpson 38 Kuralı
Bu yöntemde interpolasyon polinomu kübik (üçüncü dereceden) polinomdur.[a, b] aralıgında 4 nokta x0, x1, x2, x3 kullanılır.
p(x) = c0 + c1x+ c2x2 + c3x
3
biçiminde olsun. Buradan
p(x0) = f(x0), p(x1) = f(x1), p(x2) = f(x2), p(x3) = f(x3)
esitlikleri kullanılarak c0, c1, c2, c3 sabitleri hesaplanır. Polinomun integrali alı-nır.
∫ b
af(x)dx ≈
∫ b
ap(x)dx
Burada c0, c1, c2, c3 sabitleri yerine yazılarak p(x) polinomunun integrali alın-dıgında ∆x = b−a
3∫ b
af(x)dx ≈ 3∆x
8[f(x0) + 3f(x1) + 3f(x2) + f(x3)]
olarak bulunur.
Aralık sayısı n, 3’e bölünüyor olmalıdır (n = 3k, k ∈ N ).
Bilesik Simpson 38 Kuralı∫ xn
x0f(x)dx integrali için, genel n için Simpson 3
8 kuralını elde edelim. [a, b]aralıgı esit uzunlukta n tane aralıga bölünür. Burada n üçe bölünen sayıdır.Aralıklar
[x0, x3], [x3, x6], · · · , [xn−3, xn]
olsun. Her alt aralıkta Simpson 38 kuralı uygulanır. Bu durumda
∆x =xn − x0
n
olmak üzere∫ xnx0
f(x)dx =∫ x3x0f(x)dx+
∫ x6x3f(x)dx+ · · ·+
∫ xnxn−3
f(x)dx
≈ 3∆x8 [f(x0) + 3f(x1) + 3f(x2) + f(x3)] + 3∆x
8 [f(x3) + 3f(x4) + 3f(x5) + f(x6)]
+3∆x8 [f(xn−3) + 3f(xn−2) + 3f(xn−1) + f(xn)]
= 3∆x8
[f(x0) + 3
∑n−2i=1,4,7,··· f(xi) + 3
∑n−1i=2,5,8,··· f(xi) + 2
∑n−3i=3,6,9,··· f(xi) + f(xn)
]Yani, Bilesik Simpson 3
8 Kuralı
∆x =xn − x0
n
130

Sayısal Integral (Numerical Integration)
vexi+1 = xi + ∆x, i = 0, 1, 2, · · · , n− 1
(veya xi = x0 + i∆x, i = 1, 2, · · · , n) olmak üzere
∫ xn
x0
f(x)dx ≈ 3∆x
8
f(x0) + 3n−2∑
i=1,4,7,···f(xi) + 3
n−1∑i=2,5,8,···
f(xi) + 2n−3∑
i=3,6,9,···f(xi) + f(xn)
olarak yazılabilir.
Örnek 4.0.15 f(x) = 0.2 + 25x − 200x2 + 675x3 − 900x4 + 400x5 fonksiyonunun[0, 0.8] aralıgındaki integralini Simpson 3
8 Kuralı ile bulalım.
∆x = 0.8−03 = 0.8
3 ve
x0 = 0, x1 =0.8
3, x2 =
1.6
3, x3 = 0.8
olur.f(x0) = 0.2, f(x1) = 1.432724, f(x2) = 3.487177, f(x3) = 0.232
olur. Bu durumda∫ 0.8
0f(x)dx ≈ 3∆x
8[f(0) + 3f(x1) + 3f(x2) + f(x3)] = 1.51917
olur. Gerçek integral degeri 1.640533’dür. Bu durumda mutlak hata ve rölatifhata yüzdesi sırasıyla
εm = 0.048833, εr = %7.4
olarak bulunur.
Simpson 38 Kuralı 1 kere uygulandıgında yöntemin hatası
Es3/8 = −f(4)(ξ)
2880(b− a)5, ξ ∈ [a, b]
olur.
Simpson 38 Kuralı derecesi ≤ 3 olan polinomlar için gerçek degeri vermektedir.
4.0.5 Gauss Kareleme Yöntemi (Gauss Quadrature)
Bu yöntemde∫ ba f(x)dx integrali için∫ b
af(x)dx ≈
n∑i=1
cif(xi)
131

Sayısal Integral (Numerical Integration)
yaklasımının hatası en küçük olacak sekilde c1, c2, · · · , cn ve x1, x2, · · · , xn(Gauss-Legendre noktaları) seçilir. Bu durumda elde edilen formüle n-noktaGauss-Legendre integral formulü denir. [−1, 1] aralıgı için elde edilir, genel[a, b] aralıgı bu aralıga transform edilebilir. Yani, burada∫ 1
−1f(x)dx ≈
n∑i=1
cif(xi)
yaklasımı yapılır. Burada 2n keyfi parametre oldugundan 2n − 1 veya dahaküçük dereceli polinomlar için tam sonuç verir.
Örnek olarak n = 2 ve [−1, 1] aralıgı için∫ 1
−1f(x)dx ≈ c1f(x1) + c2f(x2)
yaklasımının n = 2 oldugu için 2n − 1 = 3 ve daha küçük dereceli polinomlariçin tam sonuç vermesini saglayan c1, c2, x1, x2 bulalım.
f(x) = a0 + a1x+ a2x2 + a3x
3 olsun. Bu durumda∫f(x)dx =
∫ (a0 + a1x+ a2x
2 + a3x3)dx
= a0
∫1.dx+ a1
∫xdx+ a2
∫x2dx+ a3
∫x3dx
olur.
Yaklasımın f(x) = 1, x, x2, x3 için dogru oldugunu göstermek ile esdegerdir.
f(x) = 1 için∫ 1−1 1.dx = c1.1 + c2.1 = 2
f(x) = x için∫ 1−1 x.dx = c1.x1 + c2.x2 = 0
f(x) = x2 için∫ 1−1 x
2.dx = c1.x21 + c2.x
22 = 2
3
f(x) = x3 için∫ 1−1 x
3.dx = c1.x31 + c2.x
32 = 0
olur. Yani bilinmeyenler c1, c2, x1, x2 asagıdaki denklemleri saglar:
c1 + c2 = 2c1x1 + c2x2 = 0c1x
21 + c2x
22 = 2
3c1x
31 + c2x
32 = 0
Bu denklemler çözülerek
c1 = c2 = 1, x1 = − 1√3, x2 =
1√3
bulunur. Böylece, ∫ 1−1 f(x)dx ≈ c1f(x1) + c2f(x2)
= 1.f(− 1√
3
)+ 1.f
(1√3
)
132

Sayısal Integral (Numerical Integration)
2-nokta Gauss-Legendre integral formulü
∫ 1
−1f(x)dx ≈ f
(− 1√
3
)+ 1.f
(1√3
)Bu formül 3. dereceden ve daha az dereceli polinomlar için gerçek integraldegerini verir.
Burada x1 = − 1√3
ve x2 = 1√3
noktaları 2. dereceden Legendre polinomununkökleridir. Bazı Legendre polinomları
q0(x) = 1 (0.derece)q1(x) = x (1.derece)q2(x) = 3
2x2 − 1
2 (2.derece)q3(x) = 5
2x3 − 3
2 (3.derece)
3. derece Legendre polinomunun kökleri
x1 = −√
3
5, x2 = 0, x3 =
√3
5
noktaları kullanılarak 3-nokta Gauss-Legendre integral formulü bulunur:
∫ 1
−1f(x)dx ≈ 5
9f
(−√
3
5
)+
8
9f(0) +
5
9f
(√3
5
)
Katsayıları elde etmek için
f(x) = 1 için∫ 1−1 1.dx = c1 + c2 + c3 = 2
f(x) = x için∫ 1−1 x.dx = −
√35c1 +
√35c3 = 0
f(x) = x2 için∫ 1−1 x
2.dx = 35c1 + 3
5c3 = 23
olur. Yani bilinmeyenler c1, c2, c3 asagıdaki denklemleri saglar:
c1 + c2 + c3 = 2c1 − c3 = 0c1 + c3 = 10
9
Denklemler çözülürse
c1 =5
9, c2 =
8
9, c3 =
5
9
olarak bulunur.
133

Sayısal Integral (Numerical Integration)
Örnek 4.0.16∫ 1−1 x
3dx integraline 2-nokta Gauss-Legendre formulü ile yakla-sım yapalım. Gerçek integral degerini bulup hataya bakalım.
Gerçek integral degeri∫ 1
−1x3dx =
x4
4|1−1 =
1
414 − 1
4(−1)4 = 0
2-nokta Gauss-Legendre formulü ile∫ 1
−1x3dx ≈
(1√3
)3
+
(− 1√
3
)3
= 0
2-nokta Gauss-Legendre formulü derecesi 3 olan polinomlar için gerçek integraldegerini vermektedir.
Eger integral sınırları [−1, 1] degilse, verilen [a, b] sınırların dönüsümü gerekir.
x =b+ a
2+b− a
2t
dx =1
2(b− a)dt
dönüsümü kullanılır. Bu dönüsüm ile [a, b] aralıgı [−1, 1] aralıgına dönüsür.Yani ∫ b
af(x)dx =
∫ 1
−1f
(b+ a
2+b− a
2t
)b− a
2dt
Örnek 4.0.17∫ 4
0 2 cosxdx integralini
(i) 2-nokta Gauss-Legendre
(ii) 3-nokta Gauss-Legendre formülleriyle bulunuz. Gerçek integrali bulup,rölatif hata yüzdelerini hesaplayınız.
Integralin sınırları [−1, 1] olmadıgı için, sınırların bu aralıga dönüstürülmesi ge-rekir.
x = 2 + 2t =⇒ dx = 2dt
Bu durumda ∫ 4
02 cosxdx =
∫ 1
−14 cos(2 + 2t)dt
olur.
2-nokta Gauss-Legendre∫ 1
−14 cos(2 + 2t)dt ≈ 4
[cos
(2− 2
1√3
)+ cos
(2 + 2
1√3
)]= −1.3456
134

Sayısal Integral (Numerical Integration)
olur, rölatif hata yüzdesi εr = %11.09 Integralin gerçek degeri∫ 1
−14 cos(2 + 2t)dt = 2 sin(2 + 2t)|1−1 = −1.15136
3-nokta Gauss-Legendre∫ 1
−14 cos(2+2t)dt ≈ 4
[5
9cos
(2− 2
√3
5
)+
8
9cos 2 +
5
9cos
(2 + 2
√3
5
)]= −1.51196
olur, rölatif hata yüzdesi εr = %0.356 düsmüstür.
4.0.6 Alıstırmalar
(1) f(x) = x fonksiyonunun [0, 1] aralıgındaki integraline yaklasım olarakn = 1, 2, 3, 4, 5, 6, 10, 20 aralık için Dikdörtgen kuralı ile bulunuz. Integra-lin gerçek degerini bulup, her bir n için rölatif hata yüzdesini hesaplayın.
C: I =∫ 1
0 xdx = 0.5 olsun. n = 1, I ≈ 0, εr = %100, n = 2, I ≈ 0.25, εr = %50,n = 3, I ≈ 0.3333, εr = %33.4, n = 4, I ≈ 0.375, εr = %25, n = 5, I ≈ 0.4, εr =%20, n = 6, I ≈ 0.41666, εr = %16, n = 10, I ≈ 0.45, εr = %10, n = 20, I ≈0.475, εr = %5
(2) f(x) = x3 fonksiyonunun [2, 4] aralıgındaki integraline yaklasım olarakn = 4 aralık için Orta Nokta kuralı ile bulunuz. Integralin gerçek dege-rini bulup, rölatif hata yüzdesini hesaplayın.
C: I =∫ 4
2 x3dx = 60 olsun. n = 4 için ∆x = 0.5, orta noktalar
x∗1 = 9/4, x∗2 = 11/4, x∗3 = 13/4, x∗4 = 15/4
olur. I ≈ 59.625, εr = %0.62
(3) f(x) = x4 fonksiyonunun [0, 2] aralıgındaki integraline yaklasım olarakn = 4 aralık için Orta Nokta kuralı ile bulunuz. Integralin gerçek dege-rini bulup, rölatif hata yüzdesini hesaplayın.
C: I =∫ 2
0 x4dx = 6.4 olsun. n = 4 için ∆x = 0.5, orta noktalar
x∗1 = 0.25, x∗2 = 0.75, x∗3 = 1.25, x∗4 = 1.75
olur. I ≈ 8.021, εr = %20.21
(4)∫ 1
01xdx integralini 0.00001 dogrulukla Orta Nokta kuralı ile hesaplayabil-
mek için gerekli aralık sayısını bulunuz.
C: n = 361 aralık kullanılmalı.
135

Sayısal Integral (Numerical Integration)
(5)∫ 1
0 x3dx integralini 0.00001 dogrulukla Orta Nokta kuralı ile hesaplaya-
bilmek için gerekli aralık sayısını bulunuz.
C: n = 159 aralık kullanılmalı.
(6) f(x) = x4 fonksiyonunun [0, 2] aralıgındaki integraline yaklasım olarakn = 4 aralık için Yamuk kuralı ile bulunuz. Integralin gerçek degerinibulup, rölatif hata yüzdesini hesaplayın.
C: I =∫ 2
0 x4dx = 6.4 olsun. n = 4 için ∆x = 0.5 olur. I ≈ 7.0625, εr = %16.34
(7) f(x) = x3 fonksiyonunun [2, 4] aralıgındaki integraline yaklasım olarakn = 4 aralık için Yamuk kuralı ile bulunuz. Integralin gerçek degerinibulup, mutlak hatayı hesaplayın.
C: I =∫ 4
2 x3dx = 60 olsun. n = 4 için ∆x = 0.5 olur. I ≈ 60.75, εm = 0.75
(8) Asagıdaki tabloda fonksiyon degerleri verilsin.
x 2 3 4 5 6 7
y = f(x) 12
13
14
15
16
17∫ 7
2 f(x)dx integralini için yaklasımı Yamuk kuralı ile bulunuz.
C: Gerçek fonksiyon I =∫ 7
21xdx = 1.25276 olur. I ≈ 1.2715, εm = 0.018
(9) f(x) = x2 fonksiyonunun [0, 1] aralıgındaki integraline yaklasım olarakn = 1, 2, 3, 4 aralık için Yamuk kuralı ile bulunuz. Integralin gerçek de-gerini bulup, rölatif hata yüzdesini hesaplayın.
C: I =∫ 1
0 x2dx = 1/3 = 0.3333 olur. n = 1, I ≈ 0.5, εr = %50, n = 2, I ≈
0.375, εr = %12.5, n = 3, I ≈ 0.3518, εr = %5.54, n = 4, I ≈ 0.34375, εr = %3.12
(10)∫ 1
0 x4dx integralini 0.00001 dogrulukla Yamuk kuralı ile hesaplayabilmek
için gerekli aralık sayısını bulunuz.
C: n = 317 aralık kullanılmalı.
(11)∫ 1
0 x3dx integralini 0.00001 dogrulukla Yamuk kuralı ile hesaplayabilmek
için gerekli aralık sayısını bulunuz.
C: n = 224 aralık kullanılmalı.
(12) f(x) = x4 fonksiyonunun [0, 2] aralıgındaki integraline yaklasımı n =4 ve n = 8 aralık kullanarak Simpson 1
3 kuralı ile bulun. Integralingerçek degerini bulup rölatif hata yüzdesini hesaplayın. Aynı integraliOrta Nokta ve Yamuk kurallarıyla n = 4 aralık için hesapladıgınızdakiröletif hata yüzdelerini bulun. n = 4 aralık için hangi yöntem daha iyisonuç vermistir?
C: I =∫ 2
0 x4dx = 6.4 olur. n = 4, I ≈ 6.41666, εr = %0.26, n = 8, I ≈
6.399088, εr = %0.014. Orta nokta için εr = %20, Yamuk kuralı için εr =%16. Simpson 1
3 kuralı en iyi sonucu vermistir.
136

Sayısal Integral (Numerical Integration)
(13)∫ 7
21xdx integralini Simpson 1
3 kuralı 5x10−9 dogrulukla ile hesaplayabil-mek için gerekli aralık sayısını bulunuz. Aynı integrali Yamuk kuralı ileaynı dogrulukta hesaplamak için gerekli aralık sayısını bulunuz.
C: n = 226 aralık kullanılmalı. Yamuk kuralı ile n = 22822 aralık kullanıl-malı (Bakınız Örnek 4.0.10). Simpson ile çok daha az aralık kullanılarakistenen dogruluga ulasılmaktadır.
(14)∫ 1
0 ex2dx integralini Simpson 1
3 kuralı 0.00001 dogrulukla ile hesaplaya-bilmek için gerekli aralık sayısını bulunuz.
C: n = 20 aralık kullanılmalı.
(15) f(x) = 11+x fonksiyonunun [0, 1] aralıgındaki integralini Simpson 3
8 Ku-ralı ile bulalım. Gerçek degeri bulup rölatif hata yüzdesini hesaplayın.
C: I =∫ 1
01
1+xdx = 0.69314 olur. I ≈ 0.6932, εr = %0.0087,
(16)∫ 1−1 2 cosxdx integralini
(i) 2-nokta Gauss-Legendre
(ii) 3-nokta Gauss-Legendre formülleriyle bulunuz. Gerçek integralibulup, rölatif hata yüzdelerini hesaplayınız.
C: Gerçek integral degeri I = 3.366, 2-nokta Gauss-Legendre I ≈ 3.3516, εr =%0.4278, 3-nokta Gauss-Legendre I ≈ 3.366, εr = %0,
(17)∫ 14
4 x3dx integralini 2-nokta Gauss-Legendre ile bulunuz, gerçek isnteg-ral degerini bulup, mutlak hatayı hesaplayın.
C: I = 9540, x = 9 + 5t, dx = 5dt =⇒ I ≈ 9540, εm = 0
137


5 Kısmi Diferansiyel DenklemlerinSayısal Çözümleri (Numerical Solutionsfor PDE)
Mühendislik ve fen alanlarında karsılasılan pek çok problem kısmi diferan-siyel denklemlerle ifade edilir. Örnegin ısı dagılımı, ses, ısık ve su dalgaları-nın hareketleri, katı bir nesnedeki ısı transferi gibi. Kısmi diferansiyel denk-lemlerin pek çogunun analitik çözümlerini elde etmek mümkün degildir, bunedenle sayısal çözümleri bulunmaktadır. Bu bölümde bu tür problemlerinsayısal çözümleri anlatılacaktır. Kısmi diferansiyel denklemlerin sayısal çö-zümleri için temelde 2 yöntem vardır:
(i) Sonlu farklar yöntemi (Finite difference method)
(ii) Sonlu elemanlar yöntemi (Finite element method)
Sonlu farklar yönteminde kısmi türevler sonlu farklar yaklasımlarıyla degis-tirilir. Bunun sonunda örnegin Laplace denkleminin sayısal çözümleri içinlineer denklem sistemi elde edilir. Sonlu farklar yöntemi, problemin çözümbölgesinin düzgün geometrik sekil olması durumunda iyi sonuç vermekte-dir. Sonlu elemanlar yöntemi hem düzgün hemde düzgün olmayan geometrikbölgelerde iyi sonuç vermektedir. Bu bölümde Sonlu farklar yöntemi anlatı-lacaktır.
Kısmi türev (Partial Derivative)
z = f(x, y) iki degiskenli fonksiyonu için x’e göre türev alırken y degiskenisabit alınır. x’e göre kısmi türev
fx(x, y),∂f
∂x, zx(x, y)
y’e göre kısmi türev
fy(x, y),∂f
∂y, zy(x, y)
ile gösterilir. Örnegin, f(x, y) = 2xy − y2 + x2 fonksiyonu için
fx(x, y) = 2x+ 2y, fy(x, y) = 2x− 2y
139

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
olur.
Diferansiyel Denklemler (Differential Equations)
Bilinmeyen bir fonksiyon ve türevlerini içeren denklemlere diferansiyel denk-lem denir. t bagımsız degiskeni, ve bilinmeyen y = f(t) fonksiyonu ve bu fonk-siyonun y′, y
′′, · · · , y(n) türevleri arasındaki bir bagıntıya diferansiyel denk-
lem denir. Bu denklem
F (t, y, y′, y′′, · · · , y(n)) = 0
seklinde gösterilir. y = f(t) fonksiyonu tek degiskenli bir fonksiyon ise denk-leme adi diferansiyel denklem, bilinmeyen y fonksiyonu birden fazla degis-kene baglı ise denkleme kısmi diferansiyel denklem denir. Örnegin,
dy
dx− y = sinx : adi diferansiyel denklem
∂2z
∂x∂y− p(x, y)
∂z
∂x= Q(x, y) : kısmi diferansiyel denklem
En yüksek mertebeden türeve göre lineer olan kısmi diferansiyel denklemekuasilineer diferansiyel denklem denir. Ikinci mertebeden iki bagımsız degis-kenli kuasilineer denklem,
auxx + 2buxy + cuyy = F (x, y, ux, uy)
Burada x, y bagımsız degisken ve u bagımlı (bilinmeyen fonksiyon) degisken-dir. Eger,
(i) b2 − 4ac < 0 ise denklem eliptik
(örnegin Laplace denklemi: uxx + uyy = 0 veya Poisson denklemi uxx +uyy = f(x, y))
(ii) b2 − 4ac = 0 ise denklem parabolik
(örnegin bir boyutlu Isı denklemi ut = cuxx)
(iii) b2 − 4ac > 0 ise denklem hiperbolik
(örnegin bir boyutlu Dalga denklemi utt = cuxx)
Eliptik denklemler potansiyel adı verilen bir büyüklügün bölge içindeki de-gisimini temsil ederler. Potansiyel, bir büyüklügün sıklıgını ölçer. Örneginsıcaklık ve konsantrasyon birer potansiyel büyüklüktür. Bagımlı u degis-keni potansiyelin herhangi bir noktada, sınırdaki degerlere baglı olarak aldıgıdenge (equilibrium) veya daimi-durum (steady state) degerlerini belirtir. Elip-tik denklemin 2-boyutlu hal için genel tanımı uxx + uyy = f(x, y) seklindedir.
140

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Poisson denklemi olarak bilinir. Laplace denklemi ise uxx + uyy = 0 olarak bi-linir. Laplace denkleminin bir çok uygulaması vardır. Bunlardan birisi de ikiboyutlu bir cisim üzerindeki daimi-durum sıcaklık dagılımıdır.Potansiyelin farklı bir baslangıç durumundan itibaren eristigi daimi durumdegerleri bir parabolik denklemle temsil edilir. Dolayısıyla bu denklemler t za-man degiskenini de bagımsız degiskenlerden biri olarak içerir. Gerçekte bas-langıç durumundan itibaren zaman ilerledikçe nihai denge durumuna dogruadım adım ilerlenir. Önemli bir parabolik denklem bir boyutlu ısı denklemi(ut = cuxx) olup, bu denklem bir çubuk boyunca sıcaklıgın uçlardaki sartlarabaglı olarak zamanla nasıl degistigini temsil etmektedir. Buradaki c = bρ
k sa-biti sırasıyla b ısıl kapasite, ρ yogunluk ve k ısıl iletkenlik katsayısını belirtensabitlerden olusur.Üçüncü tip (hiperbolik) denklemler de zamana baglıdır. Dalgaların nasıl ya-yıldıgını ifade ettiklerinden, dalga denklemi olarak adlandırılırlar. Bir boyutluhalde yayların titresimini gösterir. Titresen bir yay için kısmi-diferansiyeldenklemutt = c2uxx burada c2 = Tg
w seklinde olup, burada T, g ve w büyüklükleri sıra-sıyla yaydaki gerilmeyi, yer çekimi ivmesini ve birim uzunluk basına agırlıgıbelirtmektedir. Bütün bu parametreler pozitif büyüklüklerdir.
Baslangıç ve Sınır Kosulları (Initial and Boundary Conditions)Genel olarak bir kısmi diferansiyel denklem baslangıç ve sınır kosulların aynıanda sahip olabilir. Baslangıç ve sınır kosulları kısmi diferansiyel denklemintek çözümünü bulmak için kullanılır. Kısmi diferansiyel denklemler baslangıçdeger veya sınır deger problemleri olarak sınıflandırılabilirler. Baslangıç degerproblemlerinde en az bir tane bagımsız degiskenin açık bir bölgesi vardır.Sınır deger problemlerinde kosullar tüm sınırlar için verilir ve bölge bütündegiskenlere göre kapalıdır. Genel olarak kısmi diferansiyel denklemler için 3çesit sınır kosulu vardır. Diyelimki bölge Sekil 5.5 de verilen bölge R olsun.R bölgesinin sınırı birbiriyle örtüsmeyen 3 bölümden olussun, S1, S2, S3.
(i) Dirichlet kosulu: Bilinmeyen fonksiyon için sınırın belirli bir bölgesindeverilir:
u(x, y) = φ(x, y), tüm (x, y) ∈ S1
Çogu fiziksel problemde φ(x, y) sabit ve (x, y) koordinatlarından bagımsızolarak verilir.
(ii) Neumann kosulu: Bilinmeyen fonksiyonun gradyanı (sınıra dik olanyön) sınırın belirli bir bölgesinde verilir:
∂u
∂n(x, y) = θ(x, y), tüm (x, y) ∈ S2
Çogu fiziksel problemde θ(x, y) sabit ve (x, y) koordinatlarından bagımsızolarak verilir.
141

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
(iii) Robbins/Karısık kosul: Bilinmeyen fonksiyonun degeri ve gradyanınınlineer kombinasyonu sınırın belirli bir bölgesinde verilir:
∂u
∂n(x, y) + ru(x, y) = γ(x, y), tüm (x, y) ∈ S3
Burada r sabittir ve çogu fiziksel problemde γ(x, y) sabit ve (x, y) koor-dinatlarından bagımsız olarak verilir.
Uygulamalar
1. Isı Denklemi (Heat Equation)
Birim uzunluktaki ince bir çubuk boyunca sıcaklıgın uçlardaki sartlara baglıolarak zamanla nasıl degistigi asagıdaki kısmi diferansiyel denklem olarakifade edilebilir:
ut = cuxx, 0 < x < 1, t > 0
L uzunlugundaki bir çubuk için, basit bir degisken dönüsümü ile problem[0, 1] aralıgına alınabilir. Çubugun her noktasındaki baslangıç ısısı
u(x, 0) = f(x), 0 < x < 1
olsun. Aynı zamanda çubugun her iki ucunda ne oldugu ile ilgili bigi ge-rekmektedir. Eger çubugun uçlarındaki ısı belirli bir seviyede tutuluyorsa(örnegin, her iki uç zamanla degisen ısıda sıvıya batırılırsa) o zaman sınırkosulları
u(0, t) = g0(t), u(1, t) = g1(t), t > 0
olarak yazılır. Diger fiziksel durumlar baska sınır kosullarını verir. Örneginçubugun bir ucunun yalıtılmıs olması x’e göre kısmi türevin uçlarda sıfırolmasına karsılık gelir:
ux(0, t) = 0 veya ux(1, t) = 0
Üçüncü olasılık çubugun bir ucunda konvektif sogutma yapılmasıdır (örne-gin sıcak çubugun serin bir havaya tutulması gibi). Bu durumda sınır kosu-lunda u ve ux bir kombinasyonu olur. Bu sekilde baslangıç ve sınır kosullarıolan kısmi diferansiyel denklem parabolik kısmi diferansiyel denkleme birörnektir. Sekil 5.1 e bakınız. Sekil 5.2 de ise asagıda verilen ısı denklemininçözümünün grafigi verilmistir.
ut = uxx, 0 < x < 1, t > 0
Baslangıç ısısıu(x, 0) = 70, 0 < x < 1
142

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
𝑥 = 10 𝑥 = 0
𝐴 =
𝜋𝑟2
𝑥
𝑇 𝒕 zamanındaki ısı
Sekil 5.1: Çubuktaki ısı dagılımı
olsun. Sınır kosulları
u(0, t) = 50, u(1, t) = 20, t > 0
olsun. ∆x = 0.1,∆t = 0.025 olsun.
Matlab kodu ve örnek Matlab kodları bölümünde verilmistir.
2. Dalga Denklemi (Wave Equation)
Örnek olarak sabit iki uç noktası arasında gerilmis olan bir yayın osilasyonhareketlerini (motion of a vibrating string) modelleyen 1-boyutlu dalga denk-lemi dikkate alınabilir:
utt − c2uxx = 0, 0 < x < 1, t ≥ 0
Daha genel aralık oldugunda [0, 1] aralıgına transform edilebilir. Yaydaki bas-langıç yer degisimi u(x, 0) ve ilk hız ut(x, 0) yayın her noktası için verilir:
u(x, 0) = f1(x), ut(x, 0) = f2(x), 0 < x < 1
Aynı zamanda yayın uçlarındaki hareketle ilgili bilgi de gerekir:
u(0, t) = 0, u(1, t) = 0, t > 0
Eger yayın uçları belirli bir fonksiyonla hareket ediyorsa sınır kosulları dahagenel sekilde
u(0, t) = g0(t), u(1, t) = g1(t), t > 0
143

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
2080
30
40
60 15
Tem
pera
ture
50
Heat Problem (Implicit Method)
Time step t=0.025
60
40 10
Length
70
20 5
0 0
Sekil 5.2: Isı denklemi örnek
144

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
olur, burada g0 veya g1 sıfır fonksiyonu da olabilir.
Eger yayın bir ucu sürtünmesiz dikey track tutturulmus ise (ısı denklemindeyalıtılmıs bir sınır kosuluna denk gelir) yaklasık sınır kosulu x = 0 veya x = 1noktasında ux = 0 olur. Daha karmasık sınır kosulları yayın bir ucu yay-kütlesistemine baglı oldugunda olur. Örnegin elastik sınır kosulu ısı denklemin-deki Newton sogutma sınır kosuluna denk gelmektedir. Bu sekilde baslan-gıç ve sınır kosulları olan kısmi diferansiyel denklem hiperbolik kısmi dife-ransiyel denkleme bir örnektir. Genel olarak bir boyutlu dalga denklemininsayısal çözümüne gerek olmasada, bir boyutlu dalga denklemi daha yük-sek boyuttaki dalga denklemlerine bir tanıtım olmaktadır. Yüksek boyuttakidalga denklemlerinin sayısal çözümleri bulunması ise önemli ve gerekli birkonudur. Örnek için Sekil 5.3 bakınız. Sekil 5.3 de asagıdaki 1 boyutlu dalgadenkleminin çözüm grafigi verilmistir.
utt = uxx, 0 ≤ x ≤ 1, 0 ≤ t ≤ 2
u(x, 0) = sin(πx),∂u
∂t(x, 0) = 0, 0 ≤ x ≤ 1
u(0, t) = 0, u(1, t) = 0, 0 ≤ t ≤ 2
3. Poisson Denklemi (Poisson Equation)
Iki boyutlu bir cisim üzerindeki daimi-durum sıcaklık dagılımını modeller.Levha boyunca sıcaklık dagılımının hesaplanmasını saglar. 0 ≤ x ≤ 1, 0 ≤ y ≤1 levha için
uxx + uyy = f(x, y)
Genel bir bölge degisken dönüsümü ile bu bölgeye transform edilebilir.
Eger herhangi bir ısı kaynagı yoksa (yani f(x, y) = 0) bu denkleme Laplacedenklemi denir. Elektrostatik ve gravitasyonel potansiyeller de Poisson denk-lemini (eger kaynak yoksa Laplace veya potansiyel denklemi) saglar.
Her sınırda ısı degerleri su sekilde tanımlanabilir:
u(0, y) = g0(y), u(1, y) = g1(y), 0 ≤ y ≤ 1
u(x, 0) = f0(x), u(x, 1) = f1(x), 0 ≤ x ≤ 1
Bir boyutlu dalga denklemi için, diger sınır kosulları
ux(0, y) = 0, veya ux(1, y) = 0 veya uy(x, 0) = 0, veya uy(x, 1) = 0
Poisson denklemi eliptik denklemlerin standart örnegidir.
145

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
-101
-5
2
0y
Hyperbolic curve for y=sin(pi*x)
1.5
5
t
0.5
x
10
10.5
0 0
Sekil 5.3: Dalga denklemi örnek
146

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
5.0.1 Eliptik Denklemler
Laplace ve Poisson Denklemleri için Fark Denklemleri
Bu bölümde en fazla karsılasılan eliptik tip denklem olarak Laplace ve Po-isson denklemleri için sonlu farklar yöntemi/finite difference method elealınacaktır. Sonlu farklar yönteminde kısmi türevler sonlu farklar yaklasım-larıyla degistirilir ve bilinmeyen fonksiyon degerlerini içeren denklemler eldeedilir. Denklemler çözülerek kısmi diferansiyel denklemi ve baslangıç/sınırkosullarını saglayan bilinmeyen fonksiyonunun yaklasık degerleri bulunur.
∇2u = uxx + uyy = 0 Laplace Denklemi
∇2u = uxx + uyy = f(x, y) Poisson Denklemi
Burada ∇2 sembolü Laplasiyen olarak adlandırılır. Eger u; x, y degiskenleri-nin bir fonksiyonu ise, bu durumda Taylor açılımı ile
u(x+ h, y) = u(x, y) + hux(x, y) + h2
2 uxx(x, y) + h3
6 uxxx(x, y) + · · ·u(x− h, y) = u(x, y)− hux(x, y) + h2
2 uxx(x, y)− h3
6 uxxx(x, y) + · · ·
Bu iki seriyi çıkarırsak ve h3, h4, · · · terimleri ihmal edilirse
ux(x, y) ≈ 1
2h[u(x+ h, y)− u(x− h, y)]
bulunur. Benzer sekilde
uy(x, y) ≈ 1
2k[u(x, y + k)− u(x, y − k)]
elde edilir. Ikinci mertebeden kısmi türevleri elde etmek için yukarıdaki Tay-lor serileri toplanır ve h3, h4, · · · terimleri ihmal edilirse
u(x+ h, y) + u(x− h, y) ≈ 2u(x, y) + h2uxx(x, y)
uxx(x, y) ≈ 1
h2[u(x+ h, y)− 2u(x, y) + u(x− h, y)] (5.1)
olur. Benzer sekilde
uyy(x, y) ≈ 1
k2[u(x, y + k)− 2u(x, y) + u(x, y − k)] (5.2)
elde edilir. Bu durumda Poisson denkleminde
uxx + uyy = f(x, y)
147

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
5.1 ve 5.2 yazılır ve h = k alınırsa
u(x+ h, y) + u(x, y + h) + u(x− h, y) + u(x, y − h)− 4u(x, y) = h2f(x, y) (5.3)
elde edilir. Bu denkleme Poisson denklemine karsılık gelen fark denklemidenir. Benzer sekilde Laplace denklemine karsılık gelen fark denklemiasagıdaki gibi bulunur:
u(x+ h, y) + u(x, y + h) + u(x− h, y) + u(x, y − h)− 4u(x, y) = 0 (5.4)
Burada h adım uzunlugudur. 5.3 ve 5.4 denklemlerinde u fonksiyonunun(x, y) noktasındaki degerinin u’nun komsulugundaki 4 nokta ile baglantılıoldugu görülmektedir. 5.4 denklemine göre u fonksiyonunun (x, y) noktasın-
(𝒙+ 𝒉,𝒚) (𝒙− 𝒉,𝒚) (𝒙,𝒚)
(𝒙,𝒚− 𝒉)
(𝒙,𝒚+ 𝒉)
𝒉
Sekil 5.4: (x, y) noktasının komsu noktaları
daki degeri komsulugundaki dört noktanın degerinin toplamının 4’e bölü-müne esittir. Eger
u(x+ h, y) = ui+1,j
u(x, y + h) = ui,j+1
u(x− h, y) = ui−1,j
u(x, y − h) = ui,j−1
ve f(xi, yj) = fij seklinde indisli yazılırsa, bu durumda 5.3 denklemi
ui+1,j + ui,j+1 + ui−1,j + ui,j−1 − 4uij = h2fij
148

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
olur. Benzer sekilde 5.4 denklemi
ui+1,j + ui,j+1 + ui−1,j + ui,j−1 − 4uij = 0
olur. baglantılı oldugunu gösterir. Laplace denkleminin Sekil 5.5 de verilenR bölgesinin C kapalı egrisi içinde çözümünü arayalım. Ilk olarak R bölge-sini sekilde oldugu gibi yatay ve dikey çizgilerle birbirinden her biri h birimuzunlukta olan aglara (grid) bölelim. Bu durumda 5.4 denklemi
𝟑𝒉 𝟐𝒉 𝒉
𝐴 =
𝜋𝑟2
𝒙
𝒚
𝟑𝒉
𝒉
𝟐𝒉
𝑹
𝟒𝒉
𝟒𝒉
𝟓𝒉
𝟓𝒉
C
Sekil 5.5: R bölgesi
uij =1
4[ui+1,j + ui,j+1 + ui−1,j + ui,j−1]
seklinde yazılabilir. uij noktası R bölgesinde en yakın komsulugunda bulu-nan 4 tane noktanın ui+1,j , ui,j+1, ui−1,j , ui,j−1 ortalamasıdır.
Örnek 5.0.1 Ince bir çelik plakanın boyutları 10 cmx20 cm dir. Kararlı ısı geçisidurumundaki sınır sartları ve plaka düzlemindeki geçerli kısmi diferansiyeldenklem asagıda verilmistir. h = 5 için iç noktalardaki sıcaklıkları sonlu farkdenklemini kullanarak bulunuz.
uxx + uyy = 0, 0 < x < 10, 0 < y < 20u(x, 0) = 0, u(x, 20) = 0, 0 ≤ x ≤ 10u(0, y) = 0 u(10, y) = 100, 0 ≤ y ≤ 20
h = 5 için 3 tane iç nokta vardır. Sekil 5.7 de uij noktaları verilmistir.
149

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
𝒖𝒊+𝟏,𝒋 𝒖𝒊−𝟏,𝒋 𝒖𝒊𝒋
𝒖𝒊,𝒋−𝟏
𝒖𝒊,𝒋+𝟏
Sekil 5.6: uij ızgara noktaları
𝒖𝟐𝟏 = 𝟏𝟎𝟎 𝒖𝟎𝟏 = 0 𝒖𝟏𝟏
𝒖𝟎𝟐 = 0
𝒖𝟏𝟑
𝒖𝟐𝟐 = 𝟏𝟎𝟎
𝒖𝟐𝟑 = 100 𝒖𝟎𝟑 = 𝟎
𝒖𝟏𝟒 = 𝟎
𝒖𝟏𝟐
𝒖𝟏𝟎 = 𝟎
Sekil 5.7: uij noktaları
150

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Her uij iç noktası için
ui+1,j + ui,j+1 + ui−1,j + ui,j−1 − 4uij = 0
sonlu farklar denklemi geçerlidir.u11 için
u21 + u01 + u12 + u10 − 4u11 = 0
olur. Buradan u01 = 0, u10 = 0, u21 = 100 oldugu için
−4u11 + u12 = −100
denklemi elde edilir. u12 için
u22 + u02 + u13 + u11 − 4u12 = 0
olur. Buradan u02 = 0, u22 = 100 oldugu için
u11 − 4u12 + u13 = −100
denklemi elde edilir. u13 için
u23 + u03 + u12 + u23 − 4u13 = 0
olur. Buradan u03 = 0, u14 = 0, u23 = 100 oldugu için
u12 − 4u13 = −100
denklemi elde edilir. Bu durumda 3 bilinmeyen (u11, u12, u13) olan 3 tane lineerdenklem
−4u11 + u12 = −100u11 − 4u12 + u13 = −100
u12 − 4u13 = −100
Denklem sistemi matris formunda −4 1 01 −4 10 1 −4
u11
u12
u13
=
−100−100−100
Lineer denklem sistemi Gauss-eleme ile çözüldügünde
u11 = 35.7143, u12 = 42.8571, u13 = 35.7143
olarak bulunur. Bu degerler plakanın iç noktalarındaki yaklasık ısı degerleridir.Yani, u fonksiyonunun yaklasık degerleri
u(5, 5) ≈ 35.7143◦C, u(5, 10) ≈ 42.8571◦C, u(5, 15) ≈ 35.7143◦C
u fonksiyonu ısı denklemini ve sınır, baslangıç kosullarını saglayan fonksiyon-dur ve ısı degerlerini verir. Sonlu farklar yöntemi ile u fonksiyonunun grid nok-talarındaki degerleri bulunmus olur.
151

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Birçok problemde sınırdaki degerler bilinmez, sadece normal dogrultudakitürev degerleri bilinir. Bu durumda sonlu farklar denklemleri yazıldıgındabazı noktalar bölgenin dısında kalır. Sınırda türev kosulu var ise Neumannkosulu denir.
Örnek 5.0.2 Verilen baslangıç, sınır kosulları (Neumann kosulu) ile Poissondenkleminin çözümüne h = 0.5 alarak bakalım.
uxx + uyy = 12xy, 0 < x < 1.5, 0 < y < 1
u(x, 0) = 0, ∂u∂n(x, 1) = 6x, 0 < x < 1.5
u(0, y) = 0 u(1.5, y) = 3y3, 0 < y < 1
Sekil 5.8 da bölge ve uij noktalarının degerleri sınır ve baslangıç kosullarınauygun olarak verilmistir. Her uij iç noktası için
𝒖𝟐𝟏 𝒖𝟎𝟏 = 0
𝒖𝟏𝟏
𝒖𝟐𝟎 = 0
𝒖𝟑𝟏 = 𝟎.𝟑𝟕𝟓
𝒖𝟐𝟐
𝒖𝟏𝟑 𝒖𝟐𝟑
𝒖𝟏𝟐
𝒖𝟏𝟎 = 𝟎
𝛛𝐮
𝝏𝒏= 𝟑
𝝏𝒖
𝝏𝒏= 𝟔
𝒖𝟑𝟐 = 𝟑
Sekil 5.8: uij noktaları
ui+1,j + ui,j+1 + ui−1,j + ui,j−1 − 4uij = h2fij
sonlu farklar denklemi geçerlidir. h2 = 0.25 ve f(x, y) = 12xy alınır.
u11 için−4u11 + u21 + u12 = 0.75
olur.
u21 için−4u21 + u11 + u22 + 0.375 = 1.5
152

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
olur. Burada 4 bilinmeyen ve 2 denklem vardır. Bu denklemdeki u12 ve u22 sınırdegerleri bilinmemektedir. Fakat u12 ve u22 sınır degerlerine karsılık ∂u
∂n = ∂u∂y
normal türev verilmistir. Bu zorluk asagıdaki yöntemle giderilir. u12 ve u22 nok-talarından Sekil 5.8 de görüldügü gibi dogrular çizerek bölgeyi genisletelim. Budurumda yeni u13 ve u23 ag noktaları elde ederiz. Bu yeni noktaları kullanaraku12 için
−4u12 + u11 + u22 + u13 = 1.5 (5.5)
u22 için
−4u22 + u21 + u12 + u23 = 0 (5.6)
seklinde 2 yeni denklem elde edilir. Bu denklem sisteminde de u13 ve u23 de-gerleri bilinmemektedir. Sınır kosullarını ve ∂u
∂y için merkezi fark formulünükullanırsak
3 =∂u12
∂y≈ u13 − u11
2h= u13 − u11 =⇒ u13 = u11 + 3
6 =∂u22
∂y≈ u23 − u21
2h= u23 − u21 =⇒ u23 = u21 + 6
olarak elde edilir. Elde edilen u13 ve u23 degerleri 5.6 ve 5.5 denklemlerindeyerine yazılırsa
−4u12 + 2u11 + u22 = −1.5
−4u22 + 2u21 + u12 = −6
denklemleri elde edilir. Böylece 4 bilinmeyen 4 denklem
−4u11 + u21 + u12 = 0.75u11 − 4u21 + u22 = 1.1252u11 − 4u12 + u22 = −1.52u21 + u12 − 4u22 = −6
olur. Matris formunda−4 1 1 01 −4 0 12 0 −4 10 2 1 −4
u11
u21
u12
u22
=
0.751.125−1.5−6
u11 = 0.077, u21 = 0.191, u12 = 0.866, u22 = 1.812. yaklasık degerleri elde edilir.
153

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
5.0.2 Parabolik Denklemler
Kısmi-diferansiyel denklemlerin parabolik karakterdeki ikinci sınıfı, tipik ör-nekleri madde yayınımı veya bölge içinde ısı akısı oldugundan genellikle ya-yınım denklemi veya ısı denklemi olarak adlandırılır. Buradaki inceleme-lerde de örnek olarak ısı problemleri ele alınacaktır. Bunların daha öncekiler-den farkı artık daimi durum problemi olmayıp, zamana baglı, yani sıcaklıgınzamanla degistigi problemler olmasıdır. Ilk olarak bir çubuk boyunca bir-boyutlu ısı akısı problemi ele alınacaktır. Sayet zaman yeterince uzun tutu-lur ve sıcaklıklar daimi-durum sartlarına erisirse bu problem de daha öncekieliptik problem örnegiyle özdes olur.
Çubugun çevresinin izole oldugu ve bu yüzden çevreyle ısı alısverisi olmadıgıvarsayılmaktadır. Bakınız Sekil 5.1, Sekil 5.2.
Bu bölümdeut = cuxx, 0 < x < a, t > 0
u(x, 0) = f(x), 0 < x < au(0, t) = T1 u(a, t) = T2, t > 0
(5.7)
sınır deger probleminin yaklasık çözümü için iki yöntem verecegiz. Bu denk-lem bir boyutlu ısı denklemi olarak bilinir ve parabolik tipten bir kısmi dife-ransiyel denklemdir. Burada T1 ve T2 çubugun (rod) uç noktalarındaki ısıyıgösterir. f fonksiyonu homojen bir çubuk (rod) içinde x = 0 noktasındanx = a noktasına kadar baslangıç ısısının dagılımıdır. Eger f fonksiyonu [0, a]aralıgında sürekli ise sınır deger probleminin çözümü tektir.
Isı Denklemi için Fark Denklemi
5.7 denkleminin yaklasık çözümünü bulmak için ilk olarak denklemin yerinegeçen, onu temsil eden fark denklemi elde edilir. Bunun için ikinci türev içinmerkezi fark yaklasımı kullanılırsa
uxx ≈u(x+ h, t)− 2u(x, t) + u(x− h, t)
h2
olur. Eger birinci türev için ileri fark yaklasımını kullanırsak
ut ≈u(x, t+ k)− u(x, t)
k
olur. Bu degerler 5.7 denkleminde yerine yazılırsa
cu(x+ h, t)− 2u(x, t) + u(x− h, t)
h2=u(x, t+ k)− u(x, t)
k(5.8)
seklinde fark denklemini elde ederiz. Eger
r =ck
h2
154

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
veu(x, t) = uij
u(x+ h, t) = ui+1,j
u(x− h, t) = ui−1,j
u(x, t+ k) = ui,j+1
olarak alınırsa 5.8 fark denklemi
ui,j+1 = rui+1,j + (1− 2r)uij + rui−1,j (5.9)
seklinde yazılır.
Biz, bazı T degerleri için 0 ≤ x ≤ a, 0 ≤ t ≤ T esitsizligi ile tanımlanan xt-düzlemindeki bir dikdörtgensel bölgede 5.7 denkleminin yaklasık çözümünübulmak istiyoruz. Bu dikdörtgensel bölgeyi k birim uzunlugunda dikey ve hbirim uzunlugunda yatay çizgilerle bölelim. Bu durumda eger
h =a
nve k =
T
m
olacak sekilde n ve m pozitif tamsayılarını seçersek, yatay ve dikey ızgaranoktaları
xi = ih, tj = jk, i = 0, 1, · · · , n, j = 0, 1, · · · ,m
olur. Bakınız Sekil 5.9. Sekil 5.9 deki siyah ızgara noktalarında sınır ve bas-
𝒂 𝟑𝒉
𝒌
(𝒏 − 𝟏)𝒉
𝟑𝒌
𝒉 𝟐𝒉
𝑇
.
.
.
𝟐𝒌
𝑥
𝑡
0
(𝒎 − 𝟏)𝒌
. . .
Sekil 5.9: Isı denklemi ızgara noktaları
155

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
langıç kosulları verildigi için u fonksiyonunun degerleri bilinmektedir. Kır-mızı ızgara noktalarında ise u fonksiyonunun degerleri bilinmemektedir. Farkdenklemi kullanılarak bilinmeyen degerler yaklasık olarak bulunur.
Amacımız, j. zaman dogrusunu kullanarak j + 1. zaman dogrusu üzerindekinoktada u(x, t) fonksiyonunun yaklasık degerini bulmak için 5.9 formulü kul-lanmaktır. Örnegin, birinci zaman dogrusu üzerindeki degerler (j = 1) sıfırıncı
𝒖𝒊+𝟏,𝒋 𝒖𝒊−𝟏,𝒋 𝒖𝒊𝒋
𝒖𝒊,𝒋+𝟏 𝒋+ 𝟏 . zaman doğrusu
𝒋. zaman doğrusu
Sekil 5.10: Isı denklemi uij noktaları
zaman dogrusu üzerinde verilen
ui0 = u(xi, 0) = f(xi)
baslangıç kosuluna baglıdır. Bu tür nümerik islemler açık sonlu farklar yön-temi diye bilinir.
Örnek 5.0.3 Çelik bir çubugun (rod) sol ucundaki ısı 100◦C sag ucundaki ısı25◦C olarak verilmistir. Çubugun uzunlugu 0.05 m dir. Çubuktaki ısı dagılımınıt = 0 ve t = 9 saniyeler için bulunuz. ∆x = 0.01 m ve ∆t = 3 s alınız. Çubuktakiilk ısı 20◦C. Çubuk için c = bρ
k olmak üzere, b = 490 cal/gr◦C ısıl kapasitekatsayısı, ρ = 7800 kg/m3 yogunluk ve k = 54 cal/s◦C ısıl iletkenlik katsayısıolarak verilmistir.
Isı denklemiut = cuxx
156

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
olup, burada c = bρk verilen sabitler kullanılarak hesaplanır. Buradan r = ck
h2=
0.4239 olur. Bu durumda 5.8 denklemi
ui,j+1 = ui,j + 0.4239(ui+1,j − 2ui,j + ui−1,j)
olur. t = 0 ısıları
u00 = 100◦C, u10 = u20 = u30 = u40 = 20◦C, u50 = 25◦C
Sekil 5.11 bakınız.
𝒊 = 𝟐 𝒊 = 𝟎
𝒖 = 𝟐𝟓
𝒖 = 𝟏𝟎𝟎
𝒊 = 𝟏
𝒊 = 𝟑 𝒊 = 𝟒 𝒊 = 𝟓
Sekil 5.11: Çubuktaki uij noktaları
t = 3 s ısıları, j = 0, i = 1
u11 = u10 + r(u20 − 2u10 + u00)= 20 + 0.4239(20− 2.20 + 100)= 53.912◦C
i = 2u21 = u20 + r(u30 − 2u20 + u10)
= 20 + 0.4239(20− 2.20 + 20)= 20◦C
i = 3, u31 = 20◦C
i = 4, u41 = 22.120◦C
157

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
t = 6 s ısıları, j = 1, i = 1
u12 = u11 + r(u21 − 2u11 + u01)= 53.912 + 0.4239(20− 2.(53.912) + 100)= 59.073◦C
i = 2u22 = u21 + r(u31 − 2u21 + u11)
= 20 + 0.4239(20− 2.20 + 53.912)= 34.375◦C
i = 3, u32 = 20.889◦C
i = 4, u42 = 22.442◦C
t = 9 s ısıları, j = 1, i = 1
u13 = u12 + r(u22 − 2u12 + u02)= 59.073 + 0.4239(34.375− 2.(59.073) + 100)= 65.953◦C
i = 2u23 = u22 + r(u32 − 2u22 + u12)
= 34.375 + 0.4239(20.899− 2.(34.375) + 59.073)= 39.132◦C
i = 3, u33 = 27.266◦C
i = 4, u43 = 22.872◦C
Örnek 5.0.4 Asagıda verilen sınır deger problemini h = 0.2, k = 0.01 alarakçözelim.
ut = uxx, 0 < x < 1, 0 < t < 0.5u(x, 0) = sin(πx), 0 < x < 1
u(0, t) = 0 u(1, t) = 0, 0 ≤ t ≤ 0.5
Gerçek çözümu(x, t) = e−π
2t sin(πx)
fonksiyonudur. Farklı (x, t) noktalarında analitik çözüm ile yaklasık çözüme aitdegerleri karsılastırınız. Mutlak hataları hesaplayınız.
Bu durumda r = ckh2
= 1.(0.01)(0.2)2
= 0.25 olur.
xi = 0.2i, i = 0, 1, 2, 3, 4, 5
tj = 0.01j, j = 0, 1, 2, · · · , 50
158

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
𝒖𝟐𝟏
𝒕 = 𝟎.𝟎𝟏 𝒔
𝒖𝟏𝟏
𝒖𝟎𝟐 = 𝟎
𝒕 = 𝟎.𝟎𝟐 𝒔𝒏
𝒖𝟒𝟏
𝒕 = 𝟎.𝟎𝟑 𝒔𝒏
𝒖𝟐𝟎= 𝒔𝒊𝒏(𝟎.𝟒 𝜋)
𝒖𝟑𝟏
𝒖𝟏𝟎= 𝒔𝒊𝒏(𝟎.𝟐𝝅)
Denklemi buraya yazın.
𝒕 = 𝟎.𝟓 𝒔𝒏
𝒕
𝒙
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
𝒖𝟑𝟎 = 𝐬𝐢𝐧(𝟎.𝟔𝝅)
𝒖𝟎𝟎 = 𝟎
𝒕 = 𝟎 𝒔𝒏
𝒖 = 𝟎 𝒖 = 𝟎
𝒖(𝒙,𝟎) = 𝐬𝐢𝐧(𝝅𝒙)
𝒖𝟒𝟎 = 𝒔𝒊𝒏(𝟎.𝟖 𝝅)
𝒖𝟓𝟎 = 𝟎
𝒖𝟓𝟏 = 𝟎
Sekil 5.12: Isı denklemi sınır, baslangıç kosulları ve uij noktaları
olur. Sekil 5.12 de problem için bölge, sınır ve baslangıç kosulları, zaman se-viyeleri ile bilinmeyen iç degerler (iç noktalardaki ısı degerleri) gösterilmistir.
ui,j+1 = ui,j + r(ui+1,j − 2ui,j + ui−1,j)
fark denkleminde yazılırsa
ui,j+1 = 0.25(ui+1,j + 2ui,j + ui−1,j)
elde edilir. j = 0 alırsak birinci zaman dogrusu üzerindeki yaklasık u sıcaklıgınıveren
ui1 = 0.25(ui+1,0 + 2ui0 + ui−1,0)
elde edilir. i = 1, 2, 3, 4 için
u11 = 0.25(u20 + 2u10 + u00)u21 = 0.25(u30 + 2u20 + u10)u31 = 0.25(u40 + 2u30 + u20)u41 = 0.25(u50 + 2u40 + u30)
denklemleri elde edilir. Sınır kosullarından
u00 = u(0, 0) = 0, u50 = u(1, 0) = 0
159

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
olur.
Baslangıç kosulu u(x, 0) = sin(πx) kullanılarak
u10 = u(0.2, 0) = sin(0.2π) = 0.5878, u20 = u(0.4, 0) = sin(0.4π) = 0.9511
u30 = u(0.6, 0) = sin(0.6π) = 0.9511, u40 = u(0.8, 0) = sin(0.8π) = 0.5878
olarak elde edilir. Bu degerler kullanılarak
u11 = 0.25(0.9511 + 2(0.5878) + 0) = 0.5317
bulunur. Bu deger, u(0.2, 0.01) sıcaklıgının yaklasık degeridir. Benzer sekilde ufonksiyonunun yaklasık degerleri tablodaki gibi elde edilir.
Zaman x = 0.2 x = 0.4 x = 0.6 x = 0.8
0.00 0.5878 0.9511 0.9511 0.5878
0.01 0.5317 0.8602 0.8602 0.5317
0.02 0.4809 0.7781 0.7781 0.4809
0.03 0.4350 0.7038 0.7038 0.4350
0.04 0.3934 0.6366 0.6366 0.3934...
......
......
0.48 0.0048 0.0077 0.0077 0.0048
0.49 0.0043 0.0070 0.0070 0.0043
0.50 0.0039 0.0063 0.0063 0.0039
Gerçek (analitik) çözümu(x, t) = e−π
2t sin(πx)
seklindedir. Farklı (x, t) noktalarında analitik çözüm ile yaklasık çözüme aitdegerleri karsılastıralım. Mutlak hataları bulalım.
Gerçek deger Yaklasık deger Mutlak hatau(0.2, 0.04) = 0.3961 u14 = 0.3934 0.027
u(0.4, 0.05) = 0.5806 u25 = 0.5758 0.048
u(0.6, 0.06) = 0.5261 u36 = 0.5208 0.053
u(0.2, 0.1) = 0.2191 u1,10 = 0.2154 0.037
u(0.8, 0.14) = 0.1476 u4,14 = 0.1442 0.034
Gerçek deger ile yaklasık degerler karsılastırılacak olursa, bazı amaçlar içintabloda verilen yaklasık degerler uygun olabilir. Genel olarak yöntem için bazızorluklar vardır. Eger islem sırasında yapılan yuvarlama veya diger hatalarhızla büyürse sayısal yöntem kararlı olmaz. r ≤ 0.5 iken sayısal yöntem kararlıdiger duurmlarda kararlı degildir.
160

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Crank-Nicholson Yöntemi
Parabolik diferansiyel denklemin yaklasık çözümünü bulmak için kullanılanbir çok kapalı sonlu fark yöntemi vardır. Bu yöntemler (j+1). zaman dogrusuüzerinde u nun yaklasık çözümünü belirlemek için, lineer denklem sistemi-nin çözümüne gereksinim duyar. Kararlı olmayan problemlerin çözümü içinbu yöntemler uygulanır. Bu yöntemlerden en fazla kullanılanı Crank Nichol-son yöntemidir. Bu yöntemde
ut = cuxx
ısı denklemine karsılık gelen t ve t+1 gibi iki noktada hesaplanmıs iki merkzeifarkın ortalaması olan
c2
[u(x+h,t)−2u(x,t)+u(x−h,t)
h2+ u(x+h,t+k)−2u(x,t+k)+u(x−h,t+k)
h2
]= 1
k [u(x, t+ k)− u(x, t)]
fark denklemi kullanılır. r = ckh2
alınır. Denklem düzenlenirse (j + 1 zamanseviyesindeki degerler bir tarafa j zaman seviyesindeki degerler bir tarafatoplanırsa)
−ui−1,j+1 + αui,j+1 − ui+1,j+1 = ui+1,j − βuij + ui−1,j (5.10)
fark denklemi elde edilir. Burada j = 0, 1, · · · ,m− 1, i = 1, 2, · · · , n− 1 ve
α = 2
(1 +
1
r
), β = 2
(1− 1
r
)5.10 denkleminin seçilmesiyle ui,j+1 bilinmeyenine göre (n − 1) bilinmeyenli(n− 1) denklemden olusan bir lineer denklem sistemi elde edilir. Baslangıçtaverilen sınır kosullarından dolayı i = 0 ve i = n için ui,j+1 degeri bilinmektedir.Örnegin, n = 4 için (j + 1). zaman dogrusu üzerinde u nun yaklasık degerinibelirlemek için, kullanılacak lineer denklem sistemi
−u0,j+1 + αu1,j+1 − u2,j+1 = u2j − βu1j + u0j
−u1,j+1 + αu2,j+1 − u3,j+1 = u3j − βu2j + u1j
−u2,j+1 + αu3,j+1 − u4,j+1 = u4j − βu3j + u2j
olarak elde edilir. Bu denklem
αu1,j+1 − u2,j+1 = b1−u1,j+1 + αu2,j+1 − u3,j+1 = b2−u2,j+1 + αu3,j+1 = b3
seklinde yazılabilir. Burada
b1 = u2j − βu1j + u0j + u0,j+1
b2 = u3j − βu2j + u1j
b3 = u4j − βu3j + u2j + u4,j+1
161

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
seklindedir. Genel olarak 5.10 fark denklemini kullanarak u nun (j + 1). za-man dogrusu üzerindeki yaklasık çözümünü bulmak için
Ax = b
seklindeki lineer denklem sistemini çözmek gerekmektedir. Burada A matrisi
A =
α −1 0 0 0 · · · 0 0−1 α −1 0 0 0 00 −1 α −1 0 0 00 0 −1 α −1 0 0...
. . ....
...0 0 0 0 0 α −10 0 0 0 0 0 −1 α
biçiminde katsayılar matrisi, band matris, ve b vektörü
b1 = u2j − βu1j + u0j + u0,j+1
b2 = u3j − βu2j + u1j
b3 = u4j − βu3j + u2j...
bn−1 = unj − βun−1,j + un−2,j + un,j+1
elemanlarından olusur.
Örnek 5.0.5 Asagıda verilen sınır deger probleminin yaklasık çözümünü n = 5ve r = 1 alarak Crank-Nicholson yöntemiyle bulunuz.
ut = 0.119uxx, 0 < x < 20, 0 < t < 10u(x, 0) = 2, 0 < x < 20u(0, t) = 0 u(20, t) = 10, 0 ≤ t ≤ 10
h = 20/5 = 4 ve c = 0.119 olur.
r =ck
h2=⇒ k =
rh2
c=⇒ k =
1x42
0.119= 134.45
olarak bulunur. Burada k = 134.45 saniye cinsindendir, problemde verilen za-man aralıgı ise dakika cinsindendir. Yaklasık olarak k = 2.240 dakika olarakalınır. Böylece
α = 2
(1 +
1
r
)= 4, β = 2
(1− 1
r
)= 0
olarak elde edilir. Bu durumda j = 0 için
−u01 + αu11 − u21 = u20 − βu10 + u00
−u11 + αu21 − u31 = u30 − βu20 + u10
−u21 + αu31 − u41 = u40 − βu30 + u20
−u31 + αu41 − u51 = u50 − βu40 + u30
162
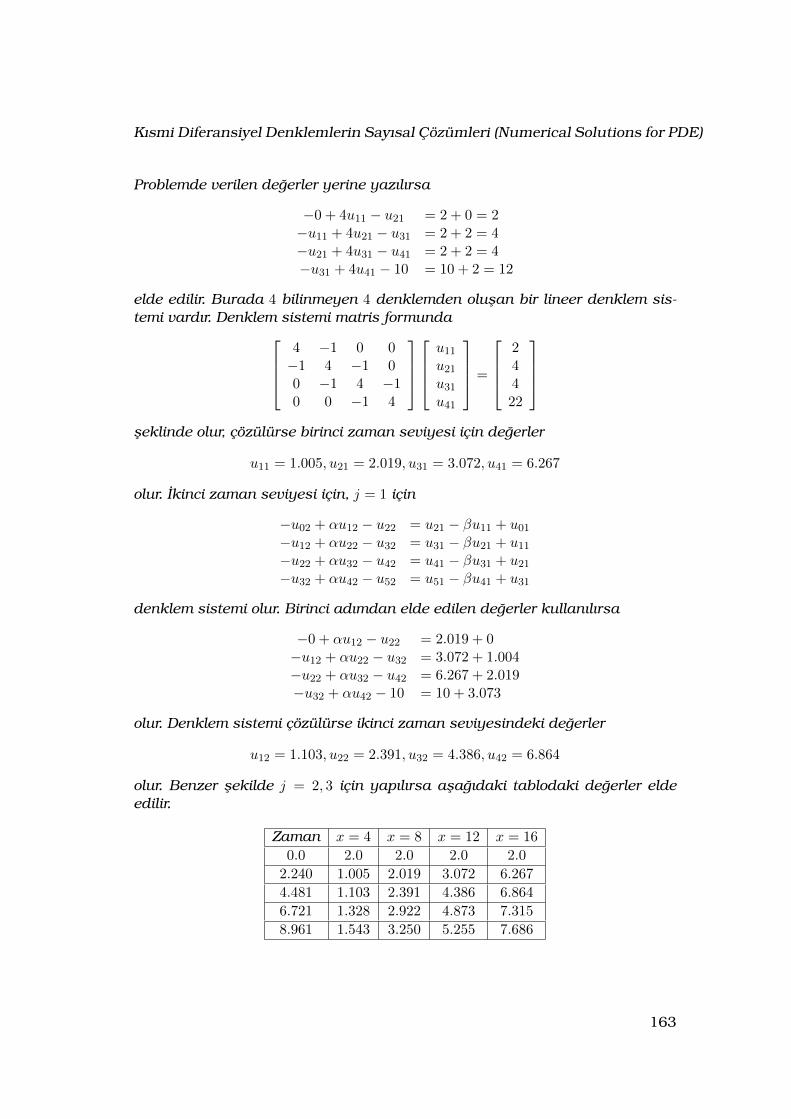
Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Problemde verilen degerler yerine yazılırsa
−0 + 4u11 − u21 = 2 + 0 = 2−u11 + 4u21 − u31 = 2 + 2 = 4−u21 + 4u31 − u41 = 2 + 2 = 4−u31 + 4u41 − 10 = 10 + 2 = 12
elde edilir. Burada 4 bilinmeyen 4 denklemden olusan bir lineer denklem sis-temi vardır. Denklem sistemi matris formunda
4 −1 0 0−1 4 −1 00 −1 4 −10 0 −1 4
u11
u21
u31
u41
=
24422
seklinde olur, çözülürse birinci zaman seviyesi için degerler
u11 = 1.005, u21 = 2.019, u31 = 3.072, u41 = 6.267
olur. Ikinci zaman seviyesi için, j = 1 için
−u02 + αu12 − u22 = u21 − βu11 + u01
−u12 + αu22 − u32 = u31 − βu21 + u11
−u22 + αu32 − u42 = u41 − βu31 + u21
−u32 + αu42 − u52 = u51 − βu41 + u31
denklem sistemi olur. Birinci adımdan elde edilen degerler kullanılırsa
−0 + αu12 − u22 = 2.019 + 0−u12 + αu22 − u32 = 3.072 + 1.004−u22 + αu32 − u42 = 6.267 + 2.019−u32 + αu42 − 10 = 10 + 3.073
olur. Denklem sistemi çözülürse ikinci zaman seviyesindeki degerler
u12 = 1.103, u22 = 2.391, u32 = 4.386, u42 = 6.864
olur. Benzer sekilde j = 2, 3 için yapılırsa asagıdaki tablodaki degerler eldeedilir.
Zaman x = 4 x = 8 x = 12 x = 16
0.0 2.0 2.0 2.0 2.0
2.240 1.005 2.019 3.072 6.267
4.481 1.103 2.391 4.386 6.864
6.721 1.328 2.922 4.873 7.315
8.961 1.543 3.250 5.255 7.686
163

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
5.0.3 Hiperbolik Denklemler
En tipik örnegi dalga denklemidir. Dalga denklemi fizikte çok önemli bir yeresahip bir kısmi diferansiyel denklemdir. Bu denklemin çözümlerinden, ses,ısık ve su dalgalarının hareketlerini betimleyen fiziksel nicelikler çıkar. Kul-lanım alanı, akustik, akıskanlar mekanigi ve elektromanyetikte oldukça faz-ladır.
Bu bölümde bir boyutlu dalga denkleminin sayısal çözümü ile ilgili fark denk-leminin nasıl elde edilecegini gösterecegiz. Bir boyutlu dalga denklemi
utt = c2uxx, 0 < x < a, t > 0
u(x, 0) = f(x), ∂u∂t |t=0 = g(x), 0 ≤ x ≤ a
u(0, t) = 0 u(a, t) = 0, t > 0
seklinde tanımlanır. Eger f ve g fonksiyonları (0, a) aralıgında ikinci mertebe-den sürekli türevlere sahip ve f(a) = f(0) = 0 ise, verilen dalga denklemininbir tek çözümü vardır.
Dalga denkleminin bir uygulaması titresimli yay problemidir. Öteleme dikolarak ölçülür ve degeri u ile gösterilir. utt = c2uxx denkleminde c2 = T0g
w0
burada T0 yaya uygulanan gerilme kuvveti (strecthing force applied to thestring), w0 (mass density) yayın birim uzunluk basına agırlıgı, g yerçekim iv-mesidir (gravitational acceleration). Baslangıç kosulundaki f(x) fonksiyonuyayın ilk durumdaki sekli (initial position of the string), türev kosulu yayınilk hızı (initial velocity of the string), sınır kosulları ise uçlardaki yayın sabityani öteleme degerinin sıfır oldugunu gösterir.
Dalga denklemi çözüldügünde hesaplanan zamanın fonksiyonu olarak yayboyunca ötelemedir.
Simdi daha önceki kısımlarda gibi dalga denkleminin yerine alacagımız sonlufark denklemini elde edelim. Dalga denkleminde ikinci mertebeden kısmi tü-revlerin yerine, yaklasık degerleri olan merkezi fark denklemlerini yazabiliriz.Yani,
uxx ≈u(x+ h, t)− 2u(x, t) + u(x− h, t)
h2
ve
utt ≈u(x, t+ k)− 2u(x, t) + u(x, t− k)
k2
yazarız. Böylece,
utt = c2uxx (5.11)
denklemi yerine
u(x, t+ k)− 2u(x, t) + u(x, t− k)
k2= c2u(x+ h, t)− 2u(x, t) + u(x− h, t)
h2
164

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Eger r = ckh olarak tanımlarsak her i = 1, 2, · · · , n− 1 ve j = 1, 2, · · · ,m− 1 için
5.11 denklemi
ui,j+1 = r2ui+1,j + 2(1− r2)uij + r2ui−1,j − ui,j−1 (5.12)
seklini alır. Bir boyutlu dalga denkleminin nümerik çözümü 5.12 açık sonlufark denklemi yöntemiyle bulunur. 5.12 denklemi 5.11 denkleminin xt-düzleminde0 ≤ x ≤ a, 0 ≤ t ≤ T esitsizligi ile tanımlanan bir dikdörtgensel bölgedeki u(x, t)yaklasık çözümünü bulmak için kullanılır. Eger n ve m pozitif tamsayılar ve
h =a
nve k =
T
m
ise, verilen dikey ve yatay ızgara dogruları
xi = ih, i = 0, 1, 2, · · · , n
tj = jk, j = 0, 1, 2, · · · ,m
olarak tanımlanır. Sekil 5.13 de görüldügü gibi baslangıçta verilen (j − 1). ve
𝒖𝒊+𝟏,𝒋 𝒖𝒊−𝟏,𝒋 𝒖𝒊𝒋
𝒖𝒊,𝒋+𝟏 𝒋+ 𝟏 . zaman doğrusu
𝒋. zaman doğrusu
𝒖𝒊,𝒋−𝟏
(j-1 . zaman doğrusu
h
k
Sekil 5.13: Dalga denklemi uij noktaları
j. zaman dogruları üzerindeki degerler kullanılarak ui,j+1 in (j + 1). zamandogrusu üzerindeki yaklasık degeri bulunur. Açık olarak
ui0 = u(xi, 0) = f(xi), baslangıç kosuluu0j = u(0, tj) = 0 unj = u(a, tj) = 0, sınır kosulları
165

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
kullanılarak ui,j+1 in (j + 1). zaman dogrusu üzerindeki yaklasık degeri bulu-nur. Baslangıç degerlerini hesaplamak için burada ufak bir sorun vardır.
5.12 denkleminden görüldügü gibi j = 1 için ui1 degerini bilmeliyiz. ui2 dege-rini hesaplayabilmek için birinci zaman dogrusu üzerinde ui1 degerinin bilin-mesi gerekmektedir. Sekil 5.13 de görüldügü gibi j = 0 için ilk zaman dogrusuüzerinde ui1 degeri ui,−1 ve sıfırıncı zaman dogrusu üzerindeki ui0 degerlerinebaglıdır. ui0 degerini bulmak için ∂u
∂t (x, 0) = g(x) baslangıç hızı kosulunu kul-lanırız. Buradan t = 0 için merkezi fark formulünü kullanarak
g(xi) = ut(xi, 0) ≈ u(xi, k)− u(xi,−k)
2k
yazabiliriz. Bu denklemde u(xi,−k) = ui,−1 oldugundan
u(xi,−k) ≈ u(xi, k)− 2kg(xi)
olur. Yani 5.12 denkleminde
ui,−1 = ui1 − 2kg(xi)
alınır. Bu durumda j = 0 için 5.12 denklemi
ui1 =r2
2(ui+1,0 + ui−1,0) + (1− r2)ui0 + kg(xi) (5.13)
olur.
Örnek 5.0.6utt = 4uxx, 0 < x < 1, 0 < t < 1
u(x, 0) = sin(πx), ∂u∂t |t=0 = 0, 0 ≤ x ≤ 1
u(0, t) = 0 u(1, t) = 0, 0 ≤ t ≤ 1
sınır deger probleminin yaklasık çözümünü n = 5,m = 20 alarak sonlu farkyöntemi ile bulunuz. Gerçek çözüm u(x, t) = sin(πx) cos(2πt) olarak verilmistir.Yaklasık degerler ile gerçek degerleri karsılastırınız.
Sekil 5.14 de problemin bölgesi, sınır ve baslangıç kosulları, zaman seviyeleriile bilinmeyen iç degerler gösterilmistir.
Probleme göre c = 2, h = 1n = 1
5 = 0.2, k = 1m = 1
20 = 0.05 ve r = 0.5 olur. g(x) = 0için 5.13 ve 5.12 denklemleri sırasıyla
ui1 = 0.125(ui+1,0 + ui−1,0) + 0.75ui0 (5.14)
ui,j+1 = 0.25ui+1,j + 1.5uij + 0.25ui−1,j − ui,j−1 (5.15)
166

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
𝒖𝟐𝟏
𝒕 = 𝟎.𝟎𝟓 𝒔
𝒖𝟏𝟏
𝒖𝟎𝟐 = 𝟎
𝒕 = 𝟎.𝟏 𝒔𝒏
𝒖𝟒𝟏
𝒕 = 𝟎.𝟏𝟓 𝒔𝒏
𝒖𝟐𝟎= 𝒔𝒊𝒏(𝟎.𝟒 𝜋)
𝒖𝟑𝟏
𝒖𝟏𝟎= 𝒔𝒊𝒏(𝟎.𝟐𝝅)
Denklemi buraya yazın.
𝒕 = 𝟏 𝒔𝒏
𝒕
𝒙
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
𝒖𝟑𝟎 = 𝐬𝐢𝐧(𝟎.𝟔𝝅)
𝒖𝟎𝟎 = 𝟎
𝒕 = 𝟎 𝒔𝒏
𝒖 = 𝟎 𝒖 = 𝟎
𝒖(𝒙,𝟎) = 𝐬𝐢𝐧(𝝅𝒙)
𝒖𝟒𝟎 = 𝒔𝒊𝒏(𝟎.𝟖 𝝅)
𝒖𝟓𝟎 = 𝟎
𝒖𝟓𝟏 = 𝟎
Sekil 5.14: Dalga denklemi sınır, baslangıç kosulları ve uij noktaları
olur. i = 1, 2, 3, 4 için 5.14 denklemeinden birinci zaman dogrusu üzerindeki ui1degerleri
u11 = 0.125(u20 + u00) + 0.75u10 = 0.55972100u21 = 0.125(u30 + u10) + 0.75u20 = 0.90564761u31 = 0.125(u40 + u20) + 0.75u30 = 0.90564761u41 = 0.125(u50 + u30) + 0.75u40 = 0.55972100
olarak elde edilir. Burada ui0 = u(xi, 0) = sin(πxi) degerleri kullanılır. Buradaxi = ih = 0.2i, i = 1, 2, 3, 4 olmaktadır.
j = 1 için 5.15 denklemi
ui2 = 0.25ui+1,1 + 1.5ui1 + 0.25ui−1,1 − ui0
olur. Bu durumda i = 1, 2, 3, 4 için
u12 = 0.25u21 + 1.5u11 + 0.25u01 − u10
u22 = 0.25u31 + 1.5u21 + 0.25u11 − u20
u32 = 0.25u41 + 1.5u31 + 0.25u21 − u30
u42 = 0.25u51 + 1.5u41 + 0.25u31 − u40
olur. Bu degerler, birinci zaman dogrusu üzerindeki hesaplanmıs ui1, i = 1, 2, 3, 4ve sınır degerleri kullanılarak hesaplanırsa ikinnci zaman dogrusu üzerindekiu degerleri bulunmus olur. Bu sekilde çözüme yaklasım için asagıdaki tablo-daki degerler elde edilir.
167

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
Zaman x = 0.2 x = 0.4 x = 0.6 x = 0.8
0.0 0.5878 0.9511 0.9511 0.5878
0.05 0.5597 0.9056 0.9056 0.5597
0.10 0.4782 0.7738 0.7738 0.4782
0.15 0.3510 0.5680 0.5680 0.3510
0.20 0.1903 0.3080 0.3080 0.1903
0.25 0.0115 0.0185 0.0185 0.0115
0.30 −0.1685 −0.2727 −0.2727 −0.1685
0.35 −0.3324 −0.5378 −0.5378 −0.3324...
......
......
0.50 −0.5873 −0.9503 −0.9503 −0.5873...
......
......
0.70 −0.2119 −0.3428 −0.3428 −0.2119
0.75 −0.0344 −0.0556 −0.0556 −0.0344
0.80 0.1464 0.2369 0.2369 0.1464
0.85 0.3132 0.5068 0.5068 0.3132
0.90 0.4501 0.7283 0.7283 0.4501
0.95 0.5440 0.8803 0.8803 0.5440
1.00 0.5860 0.9482 0.9482 0.5860
Verilen denklemin analitik çözümü
u(x, t) = sin(πx) cos(2πt)
seklindedir. Asagıdaki tabloda gerçek çözümle yaklasık çözüme ait bazı deger-ler verilmistir.
Gerçek deger Yaklasık degeru(0.4, 0.25) = 0 u25 = 0.0185
u(0.6, 0.3) = −0.2939 u36 = −0.2727
u(0.2, 0.5) = −0.5878 u1,10 = −0.5873
u(0.8, 0.7) = −0.1816 u4,14 = −0.2119
Tablodan görüldügü gibi gerçek deger ile yaklasık deger arasındaki fark birhayli fazladır. Dogrulugu daha fazla olan çözüm elde etmek için 5.12 denkle-minde r = ck
h = 1 seçilmelidir. Bu durumda k = hc olur.
Eger n = 8,m = 16 olarak alınırsa h = 18 , k = 1
16 ve r = 1 olur. Bu degerler kulla-nılarak yaklasık çözüm bulunursa gerçek ve yaklasık degerler karsılastırılırsa
Gerçek deger Yaklasık degeru(0.25, 0.3125) = −0.2706 u25 = −0.2706
u(0.375, 0.375) = −0.6533 u36 = −0.6533
u(0.125, 0.625) = −0.2706 u1,10 = −0.2706
168

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
elde edilir. Tablodanda görüldügü gibi gerçek deger ile yaklasık degerler birbi-rine çok yakın hemen hemen aynıdır.
Dalga denkleminin yaklasık degerini bulmak için kullanılan açık sonlu farkyönteminde r ≤ 1 ise sistem kararlı, r > 1 ise kararlı degildir.
5.0.4 Alıstırmalar
(1) u(x, y) = ln(x2 + y2) fonksiyonunun Laplace denklemini sagladıgını gös-terin.
C: uxx + uyy = 0 oldugu gösterilir.
(2) u(x, t) = sin(2x)e−8t fonksiyonunun asagıdaki ısı denklemini ve baslangıçve sınır kosullarını sagladıgını gösterin.
ut = 2uxx, 0 ≤ x ≤ π, 0 ≤ t ≤ 0.2u(x, 0) = sin(2x), 0 ≤ x ≤ πu(0, t) = u(π, t) = 0, 0 ≤ t ≤ 0.2
(3)uxx + uyy = 0, 0 ≤ x ≤ 1, 0 ≤ y ≤ 1u(x, 0) = 0, u(x, 1) = 0, 0 ≤ x ≤ 1u(0, y) = 0 u(1, y) = 0, 0 ≤ y ≤ 1
Sınır ve baslangıç kosulları verilen Laplace denklemini h = 13 alarak
sonlu farklar yöntemi ile çözünüz. Denklem sistemini matris formundayazınız.
C: Denklem sistemi matris formunda−4 1 1 01 −4 0 11 0 −4 10 1 1 −4
u11
u21
u12
u22
=
0000
u11 = u21 = u12 = u22 = 0.
(4)uxx + uyy = 0, 0 ≤ x ≤ 1, 0 ≤ y ≤ 1u(x, 0) = x, u(x, 1) = 1, 0 ≤ x ≤ 1u(0, y) = y u(1, y) = 1, 0 ≤ y ≤ 1
Sınır ve baslangıç kosulları verilen Laplace denklemini h = 13 alarak
sonlu farklar yöntemi ile çözünüz. Denklem sistemini matris formundayazınız.
169

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
C: Denklem sistemi matris formunda−4 1 1 01 −4 0 11 0 −4 10 1 1 −4
u11
u21
u12
u22
=
−2/3−5/3−5/3−2/3
u11 = 0.54667, u21 = u12 = 0.76, u22 = 0.82667.
(5)uxx + uyy = 0, 0 ≤ x ≤ 2, 0 ≤ y ≤ 2u(0, y) = 0 u(2, y) = y(2− y), 0 ≤ y ≤ 2
u(x, 0) = 0, u(x, 2) =
{x 0 < x < 1
2− x 1 ≤ x < 2
}Sınır ve baslangıç kosulları verilen Laplace denklemini h = 2
3 alaraksonlu farklar yöntemi ile çözünüz. Denklem sistemini matris formundayazınız.
C: Denklem sistemi matris formunda−4 1 1 01 −4 0 11 0 −4 10 1 1 −4
u11
u21
u12
u22
=
0−8/9−2/3−14/9
u11 = 0.1944, u21 = 0.4167, u12 = 0.3611, u22 = 0.5833.
(6)uxx + uyy = 0, 0 ≤ x ≤ 2, 0 ≤ y ≤ 2u(0, y) = 0 u(2, y) = y(2− y), 0 ≤ y ≤ 2
u(x, 0) = 0, u(x, 2) =
{x 0 < x < 1
2− x 1 ≤ x < 2
}Sınır ve baslangıç kosulları verilen Laplace denklemini h = 1
2 alaraksonlu farklar yöntemi ile çözünüz. Denklem sistemini matris formundayazınız.
C: Denklem sistemi matris formunda
−4 1 0 1 0 0 0 0 01 −4 1 0 1 0 0 0 00 1 −4 0 0 1 0 0 01 0 0 −4 1 0 1 0 00 1 0 1 −4 1 0 1 00 0 1 0 1 −4 0 0 10 0 0 1 0 1 −4 1 00 0 0 0 1 0 1 −4 10 0 0 0 0 1 0 1 −4
u11
u21
u31
u12
u22
u32
u13
u23
u33
=
000000000
170

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
u11 = 0.1094, u21 = 0.2277, u31 = 0.3951, u12 = 0.2098
u22 = 0.4063, u32 = 0.6027, u23 = 0.5848, u33 = 0.6094
(7) Verilen baslangıç, sınır kosulları (Neumann kosulu) ile Laplace denkle-minin yaklasık çözümünü h = 0.5 alarak bulunuz.
uxx + uyy = 12xy, 0 < x < 2, 0 < y < 1
u(x, 1) = x, ∂u∂n(x, 0) = 0, 0 < x < 1.5
u(0, y) = 0 u(2, y) = 1, 0 < y < 1
C: Denklem sistemi matris formunda
1 0 −4 1 0 00 1 1 −4 0 10 0 0 1 1 −4−4 1 2 0 0 01 −4 0 2 1 00 1 0 0 −4 2
u11
u21
u12
u22
u31
u32
=
−1/2−1−5/2
00−1
u11 = 0.4018, u21 = 0.750, u12 = 0.4285, u22 = 0.8125, u31 = 0.9732, u32 = 1.0714
(8) Asagıda verilen sınır deger problemini (ısı denklemi) h = 0.2, k = 0.01alarak birinci zaman seviyesindeki degerleri bulunuz.
ut = uxx, 0 < x < 1, 0 < t < 0.5u(x, 0) = x, 0 ≤ x ≤ 1u(0, t) = 0 u(1, t) = 0, 0 ≤ t ≤ 0.5
C: r = 0.25 olur. Birinci zaman seviyesi degerleri:
u11 = 0.2, u21 = 0.85, u31 = 2.4, u41 = 0.19
(9) Asagıda verilen sınır deger problemini (ısı denklemi) h = 0.2, k = 0.02alarak birinci ve ikinci zaman seviyelerindeki degerleri bulunuz.
ut = uxx, 0 < x < 1, 0 < t < 0.5u(x, 0) = x4, 0 < x < 1u(0, t) = 0 u(1, t) = 1, 0 ≤ t ≤ 0.5
C: r = 0.5 olur. Birinci zaman seviyesi degerleri:
u11 = 0.0128, u21 = 0.0656, u31 = 0.2176, u41 = 0.5648
Ikinci zaman seviyesi degerleri:
u12 = 0.0328, u22 = 0.1152, u32 = 0.3152, u42 = 0.6088
171

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
(10) Asagıda verilen sınır deger problemini (ısı denklemi) h = 0.2, k = 0.04alarak Crank-Nicholson yöntemi ile birinci ve ikinci zaman seviyele-rindeki degerleri bulunuz.
ut = uxx, 0 < x < 1, t > 0u(x, 0) = x4, 0 < x < 1u(0, t) = 0 u(1, t) = 1, t > 0
C: r = 1 olur. Birinci zaman seviyesi degerleri:
u11 = 0.0348, u21 = 0.1136, u31 = 0.2883, u41 = 0.6045
Ikinci zaman seviyesi degerleri:
u12 = 0.0783, u22 = 0.1997, u32 = 0.3973, u42 = 0.6714
(11) Asagıda verilen sınır deger problemini (ısı denklemi) n = 8,m = 30 içinCrank-Nicholson yöntemi ile ilk iki zaman seviyesi için çözünüz.
ut = 0.25uxx, 0 < x < 2, 0 < t < 0.3u(x, 0) = sin(πx), 0 < x < 2
u(0, t) = 0 u(2, t) = 0, 0 ≤ t ≤ 0.3
Gerçek çözümu(x, t) = e−π
2t/4 sin(πx)
fonksiyonudur. Ilk iki zaman seviyesi için (x, t) noktalarında analitikçözüm ile yaklasık çözüme ait degerleri x = 0.25, x = 0.5 ve x = 0.75 içinkarsılastırınız. Mutlak hataları hesaplayınız.
C: h = 0.25, k = 0.01, c = 0.25 olur.
Gerçek deger Yaklasık deger Mutlak hatau(0.25, 0.01) = 0.6899 0.6907 8.0e− 04
u(0.25, 0.02) = 0.6731 0.6747 0.0016
u(0.5, 0.01) = 0.9756 0.9768 0.0012
u(0.5, 0.02) = 0.9518 0.9542 0.0024
u(0.75, 0.01) = 0.6899 0.6907 8.0e− 04
u(0.75, 0.02) = 0.6731 0.6747 0.0016
(12)utt = uxx, 0 < x < 1, t > 0
u(x, 0) = 18 sin(πx), ∂u
∂t |t=0 = 0, 0 ≤ x ≤ 1u(0, t) = 0 u(1, t) = 0, t > 0
sınır deger probleminin (dalga denkleminin) yaklasık çözümünü h =k = 0.25 alarak sonlu fark yöntemi ile ilk üç zaman seviyesi için t =0.25, t = 0.5, t = 0.75 saniyeler için bulunuz.
172

Kısmi Diferansiyel Denklemlerin Sayısal Çözümleri (Numerical Solutions for PDE)
C: Ilk zaman seviyesi t = 0.25 sn
u11 = 1/16, u21 =√
2/16, u31 = 1/16
Ikinci zaman seviyesi t = 0.5 sn
u12 = 0, u22 = 0, u32 = 0
Üçüncü zaman seviyesi t = 0.75 sn
u13 = −1/16, u23 = −√
2/16, u33 = −1/16
(13)utt = uxx, 0 < x < 1, t > 0
u(x, 0) = x(1− x), ∂u∂t (x, 0) = 0, 0 ≤ x ≤ 1
u(0, t) = 0 u(1, t) = 0, t > 0
sınır deger probleminin (dalga denkleminin) yaklasık çözümünü h =0.2, k = 0.2 alarak sonlu fark yöntemi ile ilk üç zaman seviyesi t = 0.2, t =0.4, t = 0.6 saniyeler için bulunuz.
C: Ilk zaman seviyesi t = 0.2 sn
u11 = 0.12, u21 = 0.2, u31 = 0.2, u41 = 0.12
Ikinci zaman seviyesi t = 0.4 sn
u12 = 0.04, u22 = 0.08, u32 = 0.08, u42 = 0.04
Üçüncü zaman seviyesi t = 0.6 sn
u13 = −0.04, u23 = −0.08, u33 = −0.08, u43 = −0.04
173





























