Embed Size (px)
Citation preview

Magnetic Swarm Control for Active Embolization
by
Mengxi Luo
A thesis submitted in conformity with the requirements for the degree of Master of Applied Science
Graduate Department of Mechanical and Industrial Engineering University of Toronto
© Copyright by Mengxi Luo 2019

ii
Magnetic Swarm Control for Active Embolization
Mengxi Luo
Master of Applied Science
Graduate Department of Mechanical and Industrial Engineering
University of Toronto
2019
Abstract
Conventional embolization strategy using agents such as polymer particles lacks the ability of
active control after the particles are released into the bloodstream, thus risking damaging healthy
tissues with unintended occlusion. This thesis presents a new magnetic swarm control to achieve
targeted embolization by maintaining (vs. periodically lowering) the magnetic force interactions
of swarm for aggregation (vs. disassembly) within (vs. outside) the confined region under
continuous flow. The dynamic of swarm was studied to determine the required minimum
magnetic force and the corresponding strength of magnetic field to form aggregation. A model of
magnetic field and an algorithm of electric current determination were created to spatially and
temporally generate a magnetic field rotating pattern to differentiate the aggregation inside and
outside the target region. The magnetic system was validated on a microfluidic model and a
porcine omentum tissue using swarms of 1 µm thrombin-coated magnetic particles in a
physiological flow.

iii
Acknowledgments
I am sincerely grateful to my advisor, Professor Yu Sun, for his support, and guidance throughout
my Master study. Whenever I encountered difficulties, Prof. Sun always inspired me to think
deeper and broader instead of demanding me to do what he preferred. His guidance significantly
improved my critical thinking and problem-solving skills. Prof. Sun’s enthusiasms for research
and his dedication to work are also what I appreciate and always motivate me to be passionate for
not only research but also my own life. I appreciate everything he has done for me during the past
two years, which makes my master’s study a unique and beneficial experience in my life.
I would like to give special thanks to Xian Wang, Liming Xin, Zhuoran Zhang, Han Wu, Guanqiao
Shan, Changsheng Dai, Wenkun Dou, Min Zhu, Zongjie Huang and Tiancong Wang for sharing
their valuable knowledge with me; and all past and present members of the Advanced Micro and
Nanosystems Laboratory for all their helpful discussion and encouragement. Especially, big
thanks to Junhui Law for collaborating with me on this project and it is truly a pleasure; and
Zhensong Xu for being a fabulous lab mate and supportive friend, who always give me wise
suggestions and emotional support.
I would like to express my special thanks to my husband, Haijiao Liu for his care, companion and
endless love. I will miss the days we worked together in the lab.
Last but not least, I wish to thank my parents for their encouragement and love over the years.
They always support every decision I make in my life, giving me the courage to move forward.

iv
Table of Contents
Acknowledgments.......................................................................................................................... iii
Table of Contents ........................................................................................................................... iv
List of Tables ................................................................................................................................ vii
List of Figures .............................................................................................................................. viii
Chapter 1 ..........................................................................................................................................1
Introduction .................................................................................................................................1
1.1 Motivation ............................................................................................................................1
1.2 Research objectives ..............................................................................................................3
1.3 Dissertation outline ..............................................................................................................4
Chapter 2 ..........................................................................................................................................6
Background .................................................................................................................................6
2.1 Embolization therapy ...........................................................................................................6
2.2 Principles of magnetic actuation ..........................................................................................7
2.3 Magnetic control in locally targeted therapy .......................................................................9
2.3.1 High-gradient pulling force ......................................................................................9
2.3.2 Biohybrid for targeted drug delivery .....................................................................12
2.4 Techniques of magnetic swarm control .............................................................................13
2.4.1 Self-propulsive microswimmer swarm ..................................................................14
2.4.2 Magnetic particle swarm ........................................................................................15
2.5 Techniques of magnetic multi-agent selective control ......................................................17
Chapter 3 ........................................................................................................................................19
Spatial confinement of aggregation ..........................................................................................19
3.1 Application scenario ..........................................................................................................19
3.2 Strategy for spatial confinement of aggregation ................................................................21
Chapter 4 ........................................................................................................................................23

v
Modelling and characterization .................................................................................................23
4.1 Aggregation shape and dynamic model .............................................................................23
4.2 Magnetic field modelling ...................................................................................................28
4.3 Validation of magnetic field modelling .............................................................................31
4.4 Constraints on magnetic field for aggregation confinement ..............................................33
4.5 Validation of the control strategy by COMSOL simulation ..............................................35
Chapter 5 ........................................................................................................................................38
System design ...........................................................................................................................38
5.1 Magnetic particle selection ................................................................................................38
5.2 Electromagnetic coil system ..............................................................................................38
5.3 Imaging stage .....................................................................................................................39
5.4 Microfluidic phantom of vasculature networks .................................................................39
Chapter 6 ........................................................................................................................................41
Results .......................................................................................................................................41
6.1 System calibration ..............................................................................................................41
6.1.1 Magnetic field modelling calibration .....................................................................41
6.1.2 Determination of frequency of rotating magnetic field .........................................43
6.1.3 Determination of the critical B ..............................................................................44
6.2 Performance of magnetic aggregation confinement control ..............................................45
6.3 Magnetic particle functionalization for embolization ........................................................47
6.3.1 Functionalization group selection ..........................................................................47
6.3.2 Determination of thrombin coating concentration .................................................49
6.4 In-vitro embolization in microchannel phantom ................................................................50
6.5 Ex-vivo embolization .........................................................................................................53
6.5.1 Heart .......................................................................................................................53
6.5.2 Omentum................................................................................................................53

vi
Chapter 7 ........................................................................................................................................56
Conclusion and future work ......................................................................................................56
7.1 Conclusion .........................................................................................................................56
7.1 Future work ........................................................................................................................57
References ......................................................................................................................................59

vii
List of Tables
Table 1. Position related constant Rm and Zm for each coil. ....................................................... 31
Table 2. Calibrated parameters in the magnetic field modelling. ................................................. 41

viii
List of Figures
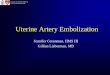
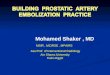
Figure 1-1. Schematic of tumour embolization. ............................................................................. 3
Figure 2-1. Four different actuation modes of magnetic micromanipulations. .............................. 9
Figure 2-2. Targeted therapy using magnetic high-gradient pulling force. .................................. 11
Figure 2-3. Targeted therapy using magnetic biohybrid microrobots. ......................................... 13
Figure 2-4. Techniques of magnetic swarm control of self-propulsive microswimmer and
microparticles. ............................................................................................................................... 16
Figure 2-5. Techniques of magnetic multi-agent selective control.. ............................................. 18
Figure 3-1. Schematic of magnetic aggregation formation in the blood vessels of the target
region for active embolization treatment. ..................................................................................... 20
Figure 3-2. Strategy for spatial confinement of aggregation. ....................................................... 22
Figure 4-1. The mechanism of the disassembly of a chain-shaped aggregate at the blood vessel’s
branching junction under the flow. ............................................................................................... 25
Figure 4-2. The mechanism of the disassembly of a disk-shaped aggregate at the blood vessel’s
branching junction under the flow. ............................................................................................... 27
Figure 4-3. The coordinate systems of a single current loop and the four-coil setup . ................. 30
Figure 4-4. Iron cores induced distortion in the magnetic field. ................................................... 32
Figure 4-5. Definition of the targeted region and the non-targeted region in the corresponding ¼
control cycle. ................................................................................................................................. 35
Figure 4-6. Validation of the MATLAB off-line calculator with COMSOL simulated magnetic
fields over a complete control cycle. ............................................................................................ 37
Figure 5-1. System setup for magnetic guided active embolization and design of the microfluidic
device for mimicking blood vessels. ............................................................................................. 40

ix
Figure 6-1. The calibration of magnetic field modelling and the determination of the effective
workspace. .................................................................................................................................... 43
Figure 6-2. The frequency response of the magnetic aggregate in the flow and the validation of
the aggregation dynamic model. ................................................................................................... 45
Figure 6-3 Performance of aggregation spatial confinement control. The control accuracy was
evaluated in terms of the radius and the position of the confinement region. .............................. 47
Figure 6-4. The fibrin crosslinking with the thrombin-coated beads by changing the fibrinogen
conformation ................................................................................................................................. 50
Figure 6-5. The embolization experiment in vitro with microchannel phantom ......................... 52
Figure 6-6. The embolization ex-vivo experiment with the porcine heart and the porcine greater
omentum ....................................................................................................................................... 55

1
Chapter 1
Introduction
1.1 Motivation
Embolization is a clinical procedure to cut off blood supply to “starve” a tumour of nutrients, as
well as for a range of other therapeutic purposes [1]. During the procedure, a catheter is used to
inject embolic agents at the point near where the clinician wants to interrupt the blood supply.
Various embolic agents are in use, including metallic coils and cyanoacrylate-based synthetic
glue. If the agent is to block small vessels downstream, polyvinyl alcohol (PVA) polymer
spheres are used [2]. All current techniques are difficult to precisely localize the embolic agents,
which limits their effectiveness. In order to achieve a complete interruption of the blood supply
within the targeted tissue, embolic agents are aggressively released upstream of the target and
block all the vessels downstream from that point (Figure 1-1) [3]. Most agents are large (i.e., >25
µm [2]) and can only passively follow blood flow. Unintended clogging and resulting tissue
necrosis is a common complication, which leads to irreversible damage to the nearby healthy
tissue [4]. To mitigate unintended vessel blocking, clinicians can precisely position the catheter
to deliver embolic agents to only specifically targeted blood vessels [4]. However, this
precaution means that the embolic agent is often limited to one or a few blood vessels per
injection, making it extremely challenging to cover an entire complex vasculature network in
vivo [5] and resulting in incomplete interruption of blood supply, which reduces the therapy’s
efficacy. There is also an additional risk that some of these large agents can escape and enter
blood circulation, causing unintended occlusions elsewhere and leading to severe complications
such as blindness and stroke [2][6][7].
Magnetic nanoparticles in recent years have gained great attention as a drug delivery approach.
Owing to their intrinsic magnetic properties, they can be guided by an external magnetic field to
target tissue for highly effective drug delivery. The superparamagnetic iron oxide has been
widely used for biomedical applications, since these particles are highly biocompatible,
eventually degraded by macrophages and transformed into ferritin and hemosiderin to supply
iron to the body when needed[8]. Recent studies have shown the promising results of using

2
magnetic particles as the drug carriers for targeted drug delivery[9][10]. The magnetic swarm
control has a great potential for active embolization, demanding a control strategy that can
precisely control the magnetic particles flowing in the bloodstream to accumulate only in the
target region.
One of the challenges of using magnetic particles as a controllable embolic agent is to precisely
confine the region where the magnetic particles aggregate for embolization. The most commonly
used strategy in targeted drug delivery with magnetic particles is to place a strong magnet or
electromagnet close to the targeted tissue [11][12][13]. However, the high gradient pulling force
generated by the magnets cannot be used for deep-tissue applications since the magnetic gradient
decays significantly with distance with an order of four. Additionally, unintended aggregation of
magnetic particles will form between the target tissue and the skin surface. Magnetic swarm
control is now a prevalent strategy to control a group of magnetic particles to assemble and
navigate [14] [15]. The challenge in the swarm control is to control the magnetic particles in
different regions selectively since the previously developed strategies use a uniform magnetic
field to control magnetic particles synchronously [14]. In fact, it is very challenging to spatially
confine the magnetic aggregation only inside a central region of a workspace without
aggregation at the periphery region. This is because the magnetic field is continuous in nature
with the highest field strength and gradient close to the generation source of the field (i.e.,
magnets or coil cores).
Another challenge in using magnetic particle for embolization is to perform the magnetic swarm
control in the complex vasculature networks with high blood flow rate (50-200 μm/s ) [16].
Magnetic microbots such as the ‘helical swimmer’ have been shown to resist flows up to 50μm/s
[17]; however, these microbots are usually in the sizes of tens of micron, which are too large
compared to the blood capillaries (8-12 μm). The high magnetic gradient pulling force by the
electromagnets has been demonstrated to accumulate swarms of 1 µm magnetic particles in the
vasculature structure. However, as mentioned before, it is not applicable for precise spatial
confinement control, which is essential for active embolization. Therefore, a magnetic swarm
control that generates strong magnetic interactions among the magnetic particles is required to
resist a high blood flow rate for active embolization in the deep tissue.

3
Figure 1-1. Schematic of tumour embolization. The catheter releases embolic agents to occlude
the tumour’s blood vessels. The red arrow points to unintended blockage; the green arrow
indicates that the large particles enter circulation. The inset is an MR image of a breast tumour
and its surrounding vessels (reproduced by permission of [18]).
1.2 Research objectives
The overall goal of this project is to use magnetic particles as an active embolic agent to achieve
targeted embolization. As discussed above, the challenge is to precisely confine the magnetic
particles to accumulate only in the targeted region of the tissue while generating strong magnetic
interactions among the beads to resist the high blood flow rate for occluding the targeted blood
vessels. Here, we propose a novel magnetic control strategy to tackle these challenges. To
confine the region of embolization, the magnetic field is applied in a dynamic pattern which
keeps the target region always exposed to a rotating magnetic field. In the meanwhile, the
dynamic application of magnetic field ensures the magnetic interactions of magnetic particles in
the non-targeted regions are periodically attenuated, thus enabling the disassembly of unintended
aggregates by blood flow. To facilitate the formation of occlusion, the magnetic particles can be
chemically functionalized for enhancing adhesions among the particles to increase resistance to
the blood flow.

4
The specific objectives of this study are as follows:
• Identify the optimal aggregation shape for embolization
• Investigate the force experienced by the magnetic aggregates in the flow and establish the
relationship between the magnetic field applied and the flow rate that can be resisted by the
magnetic aggregates
• Establish the magnetic field model to relate the currents in the electromagnetic coils with the
magnetic field pattern inside the workspace
• Develop a current determination strategy to compute current profile that can generate the
magnetic field profile designed for aggregation spatial confinement
• Design, build and integrate the magnetic control system with high magnification and
movable imaging system to visualize microchannels and image across the whole workspace
• Calibrate and validate the system design, and determine the confinement accuracy and the
effective workspace
• Analyze the coating material and concentration required
• Perform in-vitro embolization using vasculature mimicking microfluidic device
• Perform ex-vivo embolization using an animal tissue
1.3 Dissertation outline
This thesis contains the concept, modelling and experimental results of the proposed magnetic
control system for active embolization.
In chapter 2, the literature review on the current magnetic control strategies for targeted drug
delivery, swarm control and multi-agents are presented, together with an introduction on
embolization therapy. Chapter 3 presents the concept of the aggregation confinement and
targeted embolization strategy, and the application scenario where the approach can be applied.
In chapter 4, the force analysis is conducted on different shapes of the aggregation, and the
optimal aggregation shape is identified. Modelling and characterization of the magnetic system
are investigated. A current determination strategy is proposed for determining the electric
currents of each coil to achieve magnetic aggregation confinement in the targeted region with the
flexibility of controlling the size and the position of the target region. Numerical simulation for
the validation of this control strategy is also presented in this chapter. In chapter 5, magnetic

5
particle selection and the magnetic system setup are discussed. The microfluidic phantom for
mimicking vasculature network is also discussed in this chapter. In chapter 6, the experimental
results are presented, including the system calibration; the performance of the confinement
control; the selection of magnetic particles’ coating and concentration; the in-vitro embolization
test in the microfluidic device; and the primary ex-vivo test in animal tissue. The whole thesis is
summarized in chapter 7, and the future directions are also discussed in this chapter.

6
Chapter 2
Background
In this chapter, an overview of clinically used embolization treatment is first introduced. A
literature review is also conducted on magnetic control techniques for locally targeted therapy as
well as different control methods for multiple magnetic objects, including swarm control and
multi-agent selective control.
2.1 Embolization therapy
Catheter embolization places medications or synthetic materials called embolic agents through a
catheter into a blood vessel to block the blood flow to a targeted area of the tissue. It can be used
to control or prevent abnormal bleeding, cut off blood supply to a tumour, eliminate abnormal
connections between arteries and veins, or treat aneurysms [19]. Embolization is commonly used
together with chemotherapy medications for tumour treatment. Due to the blockage of the
vessels, the medication can stay in the tumour for an extended duration with a desired
concentration. During the embolization procedure, x-ray imaging and a contrast material are
used to visualize the blood vessels, and a catheter (usually a long, thin plastic tube approximately
1/8 inch in diameter) is inserted through the skin into a blood vessel and is advanced to the
treatment site. The embolic agent is then injected through the catheter to the selected vessels to
stop the blood flow. The physician usually chooses the embolic agent depending on the size of
the blood vessel and whether the treatment is intended to be permanent or temporary [3]. The
commonly used embolic agents include [20][2]:
• Gelfoam™, a gelatin sponge material. The material dissolves after a few days, up to two
weeks.
• Particulate agents, including Polyvinyl alcohol (PVA) and gelatin-impregnated acrylic
polymer spheres, which are injected into the bloodstream to block small vessels. These
agents are used to block blood vessels permanently.
• Metallic coils or other mechanical devices made of stainless steel or platinum, which are
used to block large arteries. They need to be positioned very precisely to stop bleeding
from an injured artery or stop the flow of arterial to an aneurysm.

7
• Liquid sclerosing agents such as alcohols, which are used to destroy blood vessels and
vessel malformations.
• Liquid glue that hardens quickly. When injected into the target channel, it hardens
quickly.
Embolic agents such as Gelfoam and polymer spheres follow the bloodstream passively until
reaching small vessels that stop them from flowing. The metal coils and glue usually induce
embolization at their injection spot.
The embolic therapy is less invasive than the conventional open surgery, resulting in fewer
complications and shorter duration of hospital stay (i.e., typically only one night after the
procedure is performed) [19]. This method can be used to treat the tumours and vascular
malformation that cannot be removed surgically by shrinking its size or limiting the potential
bleeding during the removal surgery. Clinical research data has shown that it is possible that
embolic agents can block in the wrong place and deprive healthy tissue of its oxygen supply[20].
In more severe cases, this can result in stroke and blindness[7].
2.2 Principles of magnetic actuation
For a magnetic object within the magnetic field, the magnetic pulling force 𝐅 that the object is
subjected to depends on its induced magnetic moment m and the gradient of the magnetic field
∇𝐁 (Figure 2-1 a).
𝐅 = ∇(𝐦 · 𝐁)
The magnetic moment induced by the magnetic field depends on the magnetic permeability of
the material and the total volume of the magnetic material within the field. When the size of the
object scales down, the magnetic moment m scales down with the volume, thus the magnetic
force scales down by a factor of three. Due to the convenience of generating a magnetic gradient
force on magnetic objects, application of direct pulling force is the commonly used method for
steering and accumulating the magnetic objects. Permanent magnets generate a large magnetic
field without generating heat in the workspace, and the field generated depends on the shape,
material, and distance from the magnet to the target [21]. Compared with a permanent magnet,
the electromagnetic system can be programmed to generate more complicated field profiles (e.g.

8
rotating magnetic field, time-invariant magnetic field) and dynamic alternating field, by
controlling the current applied to the electromagnetic coils.
A rotating magnetic field can be used to actuate the magnetic objects to rotate with respect to
their own center axis to exert torque (Figure 2-1b). When the direction of the magnetic field B
changes, the direction of the magnetic moment aligns itself toward the direction of the magnetic
field, as the magnetic torque follows
𝑇 = 𝒎×𝑩 = |𝒎||𝑩|𝑠𝑖𝑛𝜃
The θ is the angle between m and B, and sinθ reaches the maximum when m and B are
perpendicular and reaches the minimum when m and B are aligned. Helmholtz coils are the most
commonly used setup due to its capability of generating a high-frequency-rotatory uniform
magnetic field within a relatively large workspace up to a few centimetres.
Magnetic aggregation describes the phenomenon of magnetic objects form aggregates in a
magnetic field (Figure 2-1c). The objects are magnetized by a magnetic field and subsequently
interact with the neighbouring objects via dipole-dipole force, forming aggregations. The dipole-
dipole force is associated with the magnetic field strength and the distance between the particles
(i.e., scales down with the distance between magnetic particles by a factor of four). Thus, only a
thin layer of surface coating should be applied, while the thick coating such as polymer
compound on the surface of a small object would result in weak attractive forces for forming
aggregation. Suppose 𝒎1 and 𝒎2 are two magnetic dipole moments with distance r apart. The
interaction force can be expressed as
𝑭 =3𝜇
4𝜋𝑟4(𝒎1(𝒎2 ∙ �̂� ) +𝒎2(𝒎1 ∙ �̂� ) + �̂� (𝒎1 ∙ 𝒎2) − 𝟓�̂� (𝒎1 ∙ �̂� )(𝒎2 ∙ �̂� ))
The dipole-dipole interaction can be generated in the presence of a magnetic field, regardless of
gradient magnetic field or rotating magnetic field. Therefore, the formation of aggregation is
often integrated with other magnetic actuation to achieve advanced tasks. Magnetic heating
(Figure 2-1d), has also been used to generate heat, which has been used in hyperthermia
treatment for cancer [22]. Alternating magnetic fields at frequencies between 100 kHz and 40
MHz induce the alternating current on the magnetic particle and thus heat up the magnetic
particle. With a high surface to volume ratio, the microscale magnetic particle quickly dissipates
the generated heat into the surrounding environment.

9
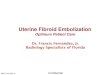
Figure 2-1. Four different actuation modes of magnetic micromanipulations. (a) In the magnetic
gradient pulling mode, magnetic objects subject to a magnetic pulling force in the magnetic
gradient field. (b) In the magnetic torque rotation mode, magnetic objects rotate and exert torque
to the attached structure. (c) In the magnetic aggregation control mode, magnetic objects are
attracted among themselves to assemble into aggregates due to dipole-dipole interactions. (d) In
the magnetic heat generation mode, magnetic objects are heated up by the current induced within
them in a high frequency alternating magnetic field.
2.3 Magnetic control in locally targeted therapy
2.3.1 High-gradient pulling force
Drug-loaded magnetic nanoparticles guided with an external magnetic field has emerged as a
promising strategy of drug delivery. The high-gradient pulling force was commonly used for
steering magnetic particles under the flow condition [23] . A magnet was attached on the skin
surface to generate a high magnetic gradient for pulling magnetic particles to accumulate near
the magnet[11][12]. Alexiou et al. introduced the drug-loaded nanoparticles through the femoral
artery close to the tumour. An electromagnet with a sharp tip was used to generate a focused high
gradient magnetic field to trap the magnetic nanoparticles during the application (Figure 2-2a)
[24]. From the image of the histological cross-section, they found that the particles penetrated the
vascular wall, infiltrated towards the magnet tip, and concentrated inside the tumour tissue
(Figure 2-2b).

10
In addition to drug delivery, this strategy was also used to reversibly occlude blood flow in
microvessels for studying ischemia in any specific cortical region [25]. A small permanent
magnet was placed above small vessels on the surface of the brain to induce aggregation of
magnetic nanoparticles for vessel occlusion (Figure 2-2c). The size of the occlusion region was
controlled by changing the permanent magnet's size as well as the distance of the magnet to the
tissue. In addition, they found that the occlusion was reversible. Without the application of an
external magnetic field, the aggregation in the vessels was cleared by blood flow in a few
seconds.
In order to use high magnetic gradient pulling in deep tissue, a small magnet can be implanted
near to the targeted region to generate a locally high magnetic gradient for attracting the
magnetic particles in the blood [26][27]. For example, in a porcine kyphoplasty model, a bone
cement integrated with magnet was implanted into the vertebral body. The magnetic
nanoparticles were intravenously injected and guided to accumulate around the thoracic vertebra
for better drug delivery [27] (Figure 2-2d). The implantation of the magnet in the core is
relatively invasive; thus it is not suitable for the soft tissue application which the magnet is
difficult to be secured. Many studies have attempted to achieve more precise magnetic particle
steering inside the vasculature by using a multiple-poles magnetic system to generate magnetic
force from multiple directions [28][29]. Hoshiar et al. effectively steered the aggregated particles
to follow the desired path in the Y-shape channel using their tow-pole system [29] (Figure 2-2e).
All the above control strategies involving gradient pulling force are not suitable for deep-tissue
applications since the magnetic gradient significantly decays with distance leading to limited
penetration depth [25]. In addition, the magnetic field gradient and strength are the highest at the
magnetic field generator (i.e. the magnet/coil) due to the nature of the magnetic field generation.
Therefore, the aggregation of magnetic particles is inevitably throughout the path between the
target tissue and the magnet/coil.

11
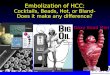
Figure 2-2. Targeted therapy using magnetic high-gradient pulling force (a) Schematic drawing of
magnetic drug targeting using attached electromagnet. Superparamagnetic nanoparticles
conjugated with drugs were injected into the supplying vascular system of the tumour while
focused by a strong external magnetic field to the target region. (b) Histological cross-sections of
the tumour showing particles can penetrate the vascular wall after magnetic drug targeting
(reproduced by permission of [24]). (c) Once a magnet approaches a blood vessel, magnetic
particles accumulate to form an occlusion, which is reversible by removing the magnet from the
blood vessel. Images show the blood vessels under a thinned skull and the occlusion of a target
vessel (reproduced by permission of [25]). (d) Schematic drawing of drug targeting using
implanted magnets. Following the introduction and inflation of the balloon, the cement with
magnets was injected into the vertebra. Magnetic nanoparticles (MNPs) were trapped by the
implanted magnet for localizing drugs in the vertebrae (reproduced by permission of [27]). (e) The
mechanism of the nanoparticle steering within a Y-shape vascular structure using the two-poles
magnetic system (reproduced by permission of [29]).
(c) (d) (e)

12
2.3.2 Biohybrid for targeted drug delivery
Self-propelled cells have been of interest to scientists for their swimming performance in a
complex physiological microenvironment. These cells usually have propeller-like flagella that
can generate large propulsion force [30]. With the integration of a magnetic component, the
external magnetic field can guide their moving direction. Xu et al. used motile sperms to serve as
the propulsion source and drug carriers, and integrated it with a 3D printed magnetic tubular
microstructure [31]. The sperm swam along the direction of the external magnetic field. The
magnetic microstructure had a four-arm feature that enabled the sperm to be released when the
feature pushes against a solid object such as tumour spheroid (Figure 2-3a). Sperms have great
potential as a treatment candidate for female reproductive diseases. However, since sperms
require specific microenvironment to survive and propel actively (such as the pH, the
concentration of mineral elements, etc.[32]), the sperm integrated system is very difficult to be
applied in the bloodstream.
The use of living bacteria as delivery vehicles has been successfully demonstrated in the animal
models [33]. Magnet-aerotactic bacteria (MC-1) is a type of bacteria, which contains a chain of
magnetic iron-oxide nanocrystals; therefore, they tend to swim along the magnetic field
direction. Meanwhile, their aerotactic sensor directs them to move towards the region with low
oxygen concentration. Felfoul et al. reported that the MC-1 could be guided by an external
magnetic field to transport drug-loaded liposomes into hypoxic regions of the tumour in mice
[34]. In the experiment, they directly injected the drug-loaded MC-1 into the tissue that near the
tumour and used the external magnetic field to guide the bacteria move towards the tumour
(Figure 2-3b). Their results showed that with magnetic guidance, the targeting ratio increased
significantly reaching over 55%. Without the magnetic directional guidance, MC-1 cells
randomly swam in a random direction and only a small portion of them swam in the direction of
the tumour, which potentially could be influenced by oxygen gradients in the tumoral tissues.
Nonetheless, it is noteworthy that rapid clearance or even autoimmune reactions might be caused
by the immune response to certain bacteria [31]. To the best of my knowledge, there is no
magnetic integrated self-propelled cell that has been controlled in the bloodstream for targeted
drug delivery.

13
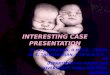
Figure 2-3. Targeted therapy using biohybrid microrobots. (a) Schematic of the mechanical release
mechanism of the magnetic microstructure and the sequence of the sperm releasing process when
the arms hit the HeLa cells (red arrows point at the sperm head) (reproduced by permission of
[31]). (b) After the injection of the MC-1 cells around the tumour tissue, the magnetic system
applied a directional magnetic field to direct the bacteria towards the xenograft. The bar graph
shows that a significant number of the peritumorally injected MC-1 cells were able to penetrate
the xenograft with magnetic guidance compared to the case without guidance. On the right is a
scanning electron microscopy image (SEM) of MC-1 cell with drug-loaded liposomes (diameter,
∼170 nm) attached to its surface (reproduced by permission of [34]).
2.4 Techniques of magnetic swarm control
In nature, swarms with thousands or even millions of individual elements can collectively
accomplish tasks that individual element cannot achieve, such as insect swarms for cargo
transportation, bacteria swarms for translocation, etc. Inspired by nature, magnetic swarm
control has been widely investigated in biomedical research. Comparing with the large solid
robots such as imaging capsule and catheter, magnetic swarm energized by an external
(a)
(b)

14
magnetic field can collectively navigate inside hard-to-reach region in the human body such
as small cavity and even vasculatures. The swarm control techniques can be classified into
two categories based on the translocation mechanism: the self-propulsive microswimmer
swarms and magnetic particles swarms that are substrate dependent.
2.4.1 Self-propulsive microswimmer swarm
Magnetic objects with specific shapes such as wave or helical shape can generate self-propulsive
force by rotating, which has been utilized in swarm locomotion control. Under a uniform rotating
magnetic field, a helix rotates with the applied field and generate a propulsion force for moving
along the rotating axis of the applied field. Servant et al. demonstrated that a swarm of helical
shape magnetic microrobot could be magnetically controlled to navigate in the peritoneal cavity
of a mouse (Figure 2-4) [35]. These microrobots were 8 and 16 µm long, which were fabricated
with 3D direct laser writing and two-photon polymerization and coated with nickel to gain the
magnetic properties. They demonstrated that the helical magnetic microswimmers could be
controlled in a collective manner to navigate inside a cavity, showing its potential for drug
delivery. Jeon et al. used the same helical microswimmers as a 3D culture scaffold for stem cell
culture and then used for stem cell delivery. They observed the proliferation and differentiation
of the stem cell into astrocytes, oligodendrocytes, and neurons after 72 hours of culture on the
microswimmers. The microswimmers were also demonstrated to be capable of magnetically to
navigate in a mouse brain slice and rat brain blood vessel as well as a peritoneal cavity of a
mouse [36].
Besides using the microswimmers as drug/ cell carriers, the recent research from Schuerle et al.
showed that the rotation of a microswimmer inside the blood flow could promote the diffusion of
the drug from the bloodstream to tumour tissue [17]. Their experiment was conducted in the
vascular mimicking microfluidic device, which has one channel to mimic blood vessels lined
with a hydrogel to mimic tumour tissue ( Figure 2-4b). Their results indicated that the magnetic
microswimmer pushed the 200 nm polymer particles in the flow to penetrate twice the depth of
nanoparticles delivered without the aid of the microswimmer into the gel compared with no aid
of the magnetic robot. These self-propulsive swimmers can resist flow; however, the size of
helical or wave shape swimmer is no smaller than several microns due to the limitation in
fabrication. Although single microswimmer has been demonstrated to navigate in the brain blood

15
vessels ( diameter 200 μm) ( Figure 2-4c) [36], it is still too big ( 80 μm) for application in the
bloodstream, where the typical sizes of capillaries range from 5 to 12 μm.
2.4.2 Magnetic particle swarm
Magnetic particles, on the other hand, are much smaller in size; however, they don’t have the
ability to generate propulsive force with only a rotating field. Instead, it tends to rotate on the
spot to align themselves with the external magnetic field without generating translational motion.
In order to generate locomotion, the particles require the interaction with a nearby solid surface
to “walk” along [37][38]. Yigit et al. achieved well-defined collective locomotion of a swarm of
microrobots, consisting of a linear chain of self-assembled magnetic microparticles[39]. The
length and precession of the microparticles chain were controlled by engineering attractive and
repulsive interactions among microrobots (Figure 2-5d). The microswarms can collectively
navigate on a solid surface by application of a tilt angle to the precession axis of the magnetic
field. Other than locomotion, magnetic particle swarm have been successfully controlled to form
diverse collective self-organization such as clustering [40], flocking [41], schooling [42], and
dissembling [43]. Xie et al. integrated several swam control strategy to achieve multiple
collective modes within one colloidal. Using alternating magnetic fields, they are able to
program hematite colloidal particles into the liquid, chain, vortex, and ribbon-like swarms and
enable fast and reversible transformations between each pattern [14]. The flexibility in swarm
reconfiguration allows the magnetic particles swarm to address environmental variations or
multitasking requirement (Figure 2-5e). Although the swam control of the magnetic particles can
tackle complex tasks in a narrow space, it is not suitable for flow environment, because the flow
will highly reduce the interaction between the magnetic aggregates and the solid surface.

16
Figure 2-4. Techniques of magnetic swarm control of self-propulsive microswimmer and
microparticles (a) The scheme of controlled swimming of a swarm of helical shape microrobot in
the intra peritoneal cavity of a mouse (reproduced by permission of [35]). (b) Schematic of a
helical shape microrobot enhancing mass transport of nanoparticles by generating convective flow
to improve mass transport(reproduced by permission of [17]). (c) Helical microrobot spinning
through the blood vessel in a rat brain. Scale bars = 200 μm (reproduced by permission of [36]).(d)
Self-assembled chains locomote on a solid surface when a tilt angle is applied to the precession
axis. The bottom-left inset shows the experimental images (reproduced by permission of [39]). (e)
Schematic showing the capabilities of collective manipulation of microrobotic swarms in different
swarm configuration, enabling them to pass through a confined channel, handle large loads and
achieve large-area synchronized manipulation (reproduced by permission of [14]).

17
2.5 Techniques of magnetic multi-agent selective control
Selective control the magnetic objects can be beneficial for the application that the magnetic
objects are distributed in the workspace to perform different tasks. Control of multiple magnetic
objects has been achieved using heterogeneous microrobot designs. With heterogeneous
magnetic object designs, the agents respond differently to the same magnetic field. Diller et al.
achieved independent control of magnetic microrobots in three dimensions using two magnetic
objects with different magnetizations [44]. Two magnetic objects that had different magnetic
moment aligned in different angles in the same rotating field B. With a rotating field locking the
orientation of the objects, they experienced forces in different directions even though in the same
magnetic gradient field, enabling independent motion control and path following of multiple
microrobots along arbitrary 3D trajectories (Figure 2-5a). Tottori et al. achieved independent
selective actuation of microrobots by combining two types of external magnetic field rotations
and two designs of the microrobot (a bar-shaped head and a cross-shaped head) [42]. Different
types of rotations of the magnetic field were designed to actuate each type of microrobot
individually or both of them simultaneously. Other designs of heterogenous magnetic objects
relying on different patterns of magnetization or mechanical designs have also been investigated
[45].
Nevertheless, very limited studies have achieved selective control of identical magnetic objects.
From my knowledge to date, selective control of identical magnetic objects has been achieved
only on a group of identical helical screws based on their spatial position [46]. By attaching a
permanent magnet on the head of each plastic screw, the screw can be rotated up and down in z-
direction with an applied rotating field. To selectively control the screw, the external field was
controlled to make a full rotation in the targeted region only (Figure 2-5b). This was realized by
combining a static magnetic field gradient with the application of a rotating field. The static
magnetic field was used to form a field-free point where all the magnetic field vectors point
away from it. The rotating uniform field was then used to move the field-free point in the
workspace along a circular trajectory around the targeted position; therefore, only the screw
inside the circular trajectory experienced a full rotation. This method locally controlled the
magnetic field direction in the workspace to achieve spatial selective control of the magnet
attached screw. While for objects such as magnetic particles, different from the fixed positioned
screw, can freely move in the workspace and can interact with each other due to dipole-dipole

18
force. Therefore, a new control strategy is required based on the application scenario and control
goal.
Figure 2-5. Techniques of magnetic multi-agent selective control (a) Schematic showing the
method to achieve independent orientation control of two microrobots in the same rotating field.
R2 has a strong magnetic moment and nearly aligns with the rotating field B with phase lag φ2.
Microrobot R1 has a weak magnetic moment and aligns with the rotating field B with phase lag
φ2. In a magnetic gradient field, the resulting force directions of each microrobot are shown as
arrows (reproduced by permission of [44]). (b) The simulation results of the path of the field-free
point (the red circle). All positions inside the circle experience a rotating field (red arrows),
whereas outside the circle, the field vectors do not go through a full rotation. Thus, actuation of
helical screws can be confined to the circle. Two pictures on the right show that three plastic screws
mounted in a threaded plate. Application of a rotating uniform field in the horizontal plane drives
all screws simultaneously (the left image). Superposition of a sharp gradient field on the rotating
field drives selected screws individually (the right image) (reproduced by permission of [46]).

19
Chapter 3
Spatial confinement of aggregation
3.1 Application scenario
Conventional embolic agents are usually released at the upstream of the target tissue by a
catheter. Once being released, the embolic agents passively flow in the bloodstream without any
active control or adjustment and often occlude healthy vessels. This can be mitigated by using
the magnetic particle as embolic agents, because their sizes can be significantly reduced
compared to the conventional agents and are able to assemble into large aggregates under
magnetic control for vessel occlusion. Furthermore, the location of embolization can be
manipulated with a programmable external magnetic field to target the tumour tissue after the
magnetic embolic agents are released into the bloodstream (Figure 3-1).
To achieve an active embolization using magnetic embolic agents, a swarm of small magnetic
particles (<1 um) are released into the vessels flowing towards the target tissue. The magnetic
particles that flow in the bloodstream are distributed in the capillary networks to cover large
areas of the targeted tissue. The flow rate in capillaries is lower than that in a large vessel,
therefore, a lower magnetic force interaction is required in capillary networks occlusion to resist
the blood flow. Importantly, the exchange of oxygen and nutrients between blood and tissue take
place at the capillary networks, thus the occlusion in capillary networks can effectively cut off
the nutrients supplies for the target tissue.
The magnetic dipole-dipole interaction is used to assemble small magnetic particles into
large aggregates. A greater dipole-dipole force is required to hold the shape of the aggregates for
continuous accumulation inside a vessel. In the absence of a large dipole-dipole force, the drag
force induced by blood flow can deform the aggregates and squeeze them through the vessels.
In the spatial confinement control of the aggregation, a dynamic pattern of the magnetic field is
applied to the workspace ensuring that the magnetic field is always strong enough to provide
sufficient dipole-dipole force to resist the flow but only in the target region. The untargeted
region is programmed to periodically experience a smaller magnetic field so that the dipole-
dipole forces are lower than needed to hold the aggregate in the flow, resulting in the
disassembly of the aggregates.

20
The dynamic control of the magnetic field pattern in the workspace enables the formation of
aggregation only in the target region. Although the magnetic dipole-dipole force is not sufficient
to completely stop the flow in the vessel, the magnetic particles can also be used as carriers for
delivery of reagents to occlude the vessels with precise control of regions for accumulation. In
this thesis, the thrombin coated magnetic particles were used as advanced embolization agents by
simultaneously and locally inducing the formation of blood clots.
The aggregation confinement control is designed to take advantage of the operating environment
with the vasculature structure and blood flow. The vasculature branching structures facilitate the
magnetic aggregates to accumulate and build up into bigger sizes as they flow down the
bloodstream and stack at the junctions of the vessels. Flow environment is also essential for
disassembling the unintended aggregates in the non-targeted region, leaving the targeted
embolization only in the confined region in the workspace.
Figure 3-1. Schematic of magnetic aggregation formation in the blood vessels of the target
region for active embolization treatment. The magnetic particles are introduced by a catheter and
aggregates as exposing to a magnetic field. The aggerates built up into large cluster and

21
accumulated at the junction of the blood vessel. The particles are coated with thrombin that can
induce the conversion of fibrinogen to fibrin mesh for blocking the blood vessels.
3.2 Strategy for spatial confinement of aggregation
To achieve spatial confinement aggregation control, in that it confined the aggregates immobilized
only in the desired region, two challenges in the magnetic control remain to be addressed. The first
challenge is to achieve the non-synchronized behaviour of magnetic swarm. The magnetic
actuation signals are designed based on the dynamic motions of magnetic aggregates to generate
a non-uniform rotating magnetic field such that the target region is exposed to a magnetic field
strong enough to resist the flow, while the magnetic field of the non-target region is attenuated.
The force interactions of the magnetic swarm are weakened in the attenuated magnetic field so
that the flow can effectively disassemble the aggregates into individual particles. The second
challenge is to confine the aggregation region by mitigating the issue of induced aggregation by
the highest magnetic field strength and gradient near the generator (i.e. electromagnetic coils). The
actuation signals are then carefully designed to generate switching pattern of the uniform rotating
magnetic field such that the target region is always exposed to rotating magnetic field, while the
magnetic field in the non-target region is periodically attenuated.
More precisely, in every ¼ cycle, there are two adjacent coils acting as the dominant coils for
generating a rotating magnetic field in the workspace, and the other two coils acting as the
auxiliary coils to enhance the attenuation of the magnetic field. The dominant coils and the
auxiliary coils are shifted by one coil every ¼ cycle, as shown in Figure 3-2a. Take the first two
¼ cycle as an example: in the first cycle, the dominant coils are supplied with out-of-phase
sinusoidal alternating currents with a phase shift of 90 degrees to generate a rotating magnetic
field. Meanwhile, the pair of auxiliary coils are supplied with opposing alternating currents to
weaken the rotating magnetic field in the disassembly region and create a sharp magnetic field
gradient between the target region and the disassembly region. The target region and the
temporary aggregated region (Figure 3-2b) experience a strong rotating magnetic field, while the
disassembly region experiences a weak rotating magnetic field. The magnetic moment
interaction of the magnetic beads in the weak rotating magnetic field (i.e., disassembly region) is
not sufficient to overcome the drag force exerting by the flow, hence no aggregation forms in
such region. For the subsequent ¼ cycle, the dominant coils and the auxiliary coils are shifted by

22
one coil (Figure 3-2a). Within the second ¼ cycle, the aggregates in the target region remain
aggregated, while the aggregates in the temporary aggregated region previously are experiencing
weak magnetic field (i.e., they are in disassembly region in this cycle), causing the aggregates to
be disassembled by the flow. Such control of dominant coils and auxiliary coils allow us to
selectively confine the aggregation region within the workspace.
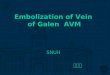
Figure 3-2 Strategy for spatial confinement of aggregation (a)The dominant coils (i.e., labelled in
orange) shift by one coil every ¼ T over a control cycle 𝑻. The dash line separates the workspace
into two regions: the aggregation region (i.e., red region) and the disassembly region (i.e., blue
region). (b) Schematic of the target region, aggregation region and a disassembly region in one ¼
T cycle.
(a)
(b)

23
Chapter 4
Modelling and characterization
4.1 Aggregation shape and dynamic model
The aggregates need to resist blood flow to accumulate in the vessels. The accumulated aggregates
may or may not stop the flow depending on the interaction between magnetic dipole-dipole force
and the hydrodynamic force. Comparing with complete blockage of the blood flow, accumulating
the magnetic aggregates inside the vessel without significant disturbance of the blood flow
required much smaller magnetic interaction. For instance, in a typical blood vessel with a diameter
of 10 µm and length 200 µm in a flow rate of 100 μm/s, the blockage will induce a hydrostatic
pressure of around 20 Pa, which is equivalent to 1200 pN on an aggregate. While, to maintain in
the same vessel, a thin disk shape aggregate only needs to resist a drag force of 21 pN without
being washed away by the blood flow. Between two 1 µm superparamagnetic particles, the
maximum dipole-dipole force is about 50 pN. Therefore, it is more efficient and practical to
accumulate the aggregation in the blood vessels than completely stop the blood flow. For
embolization, the magnetic particles can be functionalized for additional adhesion as discussed in
section 6.3.
To accumulate in the blood vessels, magnetic particles can assemble into different shapes
controlled by the external magnetic field. Within a static magnetic field, the magnetic particles
assemble into chain shape that aligned with the external magnetic field. While in a rotating
magnetic field, the magnetic particles either rotate with the low-frequency rotating field in a rod
shape or form disk shape aggregates in the high-frequency rotating field. Both chain shape and the
disk shape aggregate can accumulate inside the blood vessel at the junction.
For aggregation spatial confinement control, it is necessary to determine the minimum magnetic
field strength required to hold magnetic aggregates in a flow. From the experiment observations,
disk/chain shape aggregates separated into two parts at the junction of the blood vessels under a
large flow (Figure 4-1c, Figure 4-2c). Such phenomenon can be analyzed based on conservation
of energy that the work done by the flow equals the change in the magnetic dipolar energy.

24
The average magnetic dipolar energy 𝑈𝑚 of an aggregate in magnetic field 𝑩 is [47]
𝑈𝑚 =∑∑3𝜇0
4𝜋𝑟𝑖𝑗3 (3(𝒎𝑖 ∙ �̂�𝑖𝑗)(𝒎𝑗 ∙ �̂�𝑖𝑗) −𝒎𝑖 ∙ 𝒎𝑗)
𝑁2
𝑗=1
𝑁1
𝑖=1
[1]
where 𝑟 is the distance between two particles and �̂� is a unit vector parallel to the line
joining the centers of the two dipoles, 𝜇0 is the permeability of air, 𝒎 is the magnetic
moment, 𝑉 is the volume of a magnetic particle, 𝑁1 and 𝑁2 are the number of magnetic
particles of the top and the bottom segments respectively, Note that only the interaction
between the top and the bottom segments is considered since the opening of the aggregate
only affect the interaction energy between the segments.
In the disassembling process, the interaction between the particles of the top segments and the
bottom segments changes over the breaking displacement 𝑫. Taking the derivative of the
magnetic dipolar energy (Eq. 4) over the breaking displacement, 𝑑𝑈𝑚
𝑑𝑫, the drag force that causes
the change in the magnetic dipolar energy can be computed.
The drag force induced by a flow rate 𝒗 can be expressed in the modified Stock Law with a Stokes
shape correction factor 𝑓𝑐, an effective diameter 𝑑𝑒 as [48]
𝑭𝒅𝒓𝒂𝒈 = 𝑓𝑐6𝜋𝜂𝑑𝑒𝒗 for 𝑅𝑒 ≪ 1 [2]
The maximum flow rate that can be resisted by a given magnetic field 𝐵 is computed as
𝒗 =1
𝑓𝑐6𝜋𝜂𝑑𝑒𝑚𝑎𝑥(
𝑑𝑈𝑚𝑑𝑫
) [3]
Aggregates in a chain shape
A magnetic chain can accumulate at the junction with a static external magnetic field that
perpendicular to the flow direction. In the disassembling process, the interaction between the
particles of the top segments and the bottom segments changes over the breaking displacement D
as shown in Figure 4-1a. With the displacement equals to 0, the magnetic force is aligned with
the external field generating no force for resisting the flow. With the increment of the distance D,
the resistible drag force first increases up to 9.5 pN at 0.4µm then decrease to zero in a static

25
magnetic field of 15mT (Figure 4-1b). According to Eq. 3, the maximum flow rate that a chain-
shape aggregate can resist is 187 μm/s. The correction factor of a chain 𝑓𝑐 is 4/3 𝐸2/3
𝑙𝑛(2𝐸)−0.5 , and the
effective diameter 𝑑𝑒 is 𝐿𝑎𝐸2/3 (𝐸 = 𝐿𝑎/𝑊𝑎), where 𝐿𝑎 is the length of the chain and 𝑊𝑎 is its
width[48]. Note that physical properties of Dynabeads® MyOne™ magnetic beads were used in
the analytical modelling.
Figure 4-1. (a) The disassembly of a chain-shaped aggregate at the blood vessel’s branching
junction under the flow. (b) The magnetic dipolar energy that is stored between the top and bottom
segments 𝑼𝒎, increases with the displacement distance D before plateau at 0. (c) The resistible
drag force by an aggregate increases with the displacement D until it reaches its maximum value

26
at a distance of 0.4 µm. (d)Time sequence of the disassembling process observed from the
experiment. Scale bar = 20 μm.
Aggregates in a disk shape
Different from the chain shape, the disk-shape aggregates are formed in a high frequency rotating
magnetic field (i.e., 30 Hz). The average magnetic dipolar energy 𝑈𝑚 of an aggregate in a rotating
magnetic field 𝑩(𝑡) = 𝐵[cos(𝜔𝑡) 𝒆𝒙 − sin(𝜔𝑡)𝒆𝒚] is
𝑈𝑚 =𝜔
2𝜋∫ ∑∑
3𝜇04𝜋𝑟𝑖𝑗
3 (3(𝒎𝑖 ∙ �̂�𝑖𝑗)(𝒎𝑗 ∙ �̂�𝑖𝑗) −𝒎𝑖 ∙ 𝒎𝑗)
𝑁2
𝑗=1
𝑁1
𝑖=1
2𝜋𝜔
0
𝑑𝑡 [4]
where 𝒎 = 3V
𝜇0(𝜇𝑝−𝜇0
𝜇𝑝+2𝜇0)𝑩 and 𝑟 is the distance between two particles and �̂� is a unit
vector parallel to the line joining the centers of the two dipoles, 𝜇𝑝 and 𝜇0 are the
permeability of the magnetic particle and air respectively, 𝒎 is the magnetic moment, 𝑉
is the volume of a magnetic particle, 𝐵 is the strength of the magnetic field, 𝜔 is the
angular frequency of the magnetic field, 𝑡 represents time, and 𝒆𝒙 and 𝒆𝒚 are the unit
vectors along 𝑥 and 𝑦 axis.
Figure 4-2 b,c indicate the change of dipolar energy and the resistible drag force during the
dissembling process. The maximum drag force can resist by an aggregate in a 15mT rotating
magnetic field is 23 pN occurred at around 5 µm of breaking displacement, approximately 1/3 of
the diameter of the aggregate. Using the above equation, the maximum flow rate that a disk-
shape aggregation can resist is calculated as 192 μm/s. The correction factor of a disk with a
thickness of 𝑇𝑎 𝑎𝑛𝑑 𝑑𝑖𝑎𝑚𝑒𝑡𝑒𝑟 𝑜𝑓 𝐷𝑎 is 𝑓𝑐 =16 𝐸−1/3
9𝜋 , and the effective diameter 𝑑𝑒 is 𝐿𝑎𝐸
2/3
(𝐸 = 𝑇𝑎/𝐷𝑎) [48]. Similarly, the physical properties of the Dynabeads® MyOne™ magnetic
beads were used in analytical modelling.
Although in the magnetic fields with the same strength, the chain shape aggregation and disk
shape aggregate can resist similar flow rate, the chain shape can only accumulate inside the
vessels that are perpendicular to its alignment direction. While, a disk shape aggregation enables
accumulation in the vessels flowing from any direction; therefore, the disk shape aggregate is
preferred.

27
Figure 4-2. (a) The disassembling of a disk-shape aggregate at the blood vessel’s junction by the
flow. (b) The magnetic dipolar energy stored between the top and bottom segments 𝑼𝒎 increases
with the displacement D. (c) The resistible drag force by an aggregate increase as breaking
displacement increases, until it reaches its maximum value at a breaking displacement of around
1/3 of the diameter of the aggregate. (d)Time sequence of the disassembling process observed
from the experiment. Scale bar = 20 μm.

28
4.2 Magnetic field modelling
To confine the aggregation region, a dynamic alternating magnetic field is required to periodically
weaken the magnetic field in the non-target region to below the magnetic field strength that can
resist the fluidic flow so that the unintended aggregates are disassembled by the fluidic flow. The
magnetic field is modelled to relate the generated magnetic field in the workspace and the current
in each coil.
The system consisted of four identical magnetic coils located along x and y axis with the same
distance to the origin points. Each coil was inserted with an iron core to increase the magnetic field
strength (description of the system design is in section 5.2). At any point in the workspace of the
system, the magnetic field is the superposition of the fields contributed by each coil and can be
obtained by integrating the Biot-Savart Law over the circular current loop.
Off-axis Magnetic Field generation of a single current loop
The magnetic field B due to a single current loop can be computed by evaluating the curl
of the magnetic vector potential A. At any point in the xy-plane (i.e., P(𝑟, 0, 𝑧) ) (Figure 4-3a),
the magnetic vector potential 𝑨 produced by a constant current 𝐼 in a current loop can be
calculated by as computed in [49]:
𝑨(𝑟, 𝑧) =𝜇𝑜𝐼𝑎
4𝜋∫
cos𝜙 𝑑𝜙
√𝑎2 + 𝑟2 + 𝑧2 − 2𝑎𝑟 cos𝜙
2𝜋
0
=𝜇𝑜𝜋
𝐼𝑎
(𝑎 + 𝑟)2 + 𝑧2[(2 − 𝑘2)𝐸2(𝑘) − 2𝐸1(𝑘)
𝑘2] [5]
where 𝑎 is the radius of the coil, 𝑟, 𝜙, and 𝑧 are the cylindrical coordinates (Figure 4-3a), 𝜇0 is the
permeability of air,𝐸1(𝑘) and 𝐸2(𝑘) are the complete elliptic integrals of the first and second kind
respectively, and the argument 𝑘 of the elliptic integrals is
𝑘2 =4𝑟𝑎
(𝑎 + 𝑟)2 + 𝑧2 [6]
Knowing magnetic field 𝑩 is the curl of vector field A, based on the Law of Biot-Savart the
components of magnetic induction in cylindrical coordinates are

29
𝑩 = ∇ × 𝑨 [7]
{
𝐵𝑟 = −
1
𝑟
𝜕(𝑟𝐴)
𝜕𝑧=
𝜇𝑜𝑧
2𝜋𝑟√(𝑎 + 𝑟)2 + 𝑧2(𝑎2 + 𝑧2 + 𝑟2
𝑧2 + (𝑟 − 𝑎)2𝐸1(𝑘) − 𝐸2(𝑘)) 𝐼
𝐵𝑧 =1
𝑟
𝜕(𝑟𝐴)
𝜕𝑟=
𝜇𝑜
2𝜋√(𝑎 + 𝑟)2 + 𝑧2(𝑎2 − 𝑧2 − 𝑟2
𝑧2 + (𝑟 − 𝑎)2𝐸1(𝑘) + 𝐸2(𝑘)) 𝐼
[8]
Off-axis Magnetic Field generation of a multi-layer coil with a iron core
Different from the single current loop, to generate a high magnetic field with a compact device,
multi-layer coils with iron cores were used. The Eq.8 was modified based on the system setup. 1)
The current 𝐼 was replaced by the multiplication of the number of turns 𝑁 and the current in the
coil. 2) Since the multi-layer coil was used for enhancing the magnetic field strength and reducing
the high-frequency losses, the radius of the current loop 𝑎 needed to be replaced with the mean
radius of the coil 𝑎′ that required experimental calibration. 3) An iron core was inserted in each
coil to enhance the magnetic field strength. The permeability of the air 𝜇𝑜 was replaced by the
permeability of the core 𝜇. In our system, a thin ring of iron was used as the core to minimize the
filed distortion caused the magnetization of the core (discussed in section 4.5); therefore the 𝜇 was
a combination effect of air core and the iron ring, which required experimental calibration. The
modified magnetic field modelling is:
{
𝐵𝑟 =
𝜇 𝑧
2𝜋𝑟√(𝑎′+𝑟)2+𝑧2(𝑎′2+𝑧2+𝑟2
𝑧2+(𝑟−𝑎′)2𝐸1(𝑘) − 𝐸2(𝑘))𝑁𝐼 = 𝑅𝑚𝑁𝐼
𝐵𝑧 =𝜇
2𝜋√(𝑎′+𝑟)2+𝑧2(𝑎′2−𝑧2−𝑟2
𝑧2+(𝑟−𝑎′)2𝐸1(𝑘) + 𝐸2(𝑘))𝑁𝐼 = 𝑍𝑚𝑁𝐼
[9]
where 𝑅𝑚 and 𝑍𝑚 are the position related constant determined by the cylindrical coordinate of a
target point, and 𝑚 = 1, 2, 3, 4 representing the four coils.
Magnetic Field in the workspace
In a 2D Cartesian coordinates workspace, the magnetic field of an arbitrary position, 𝐵(𝑥,𝑦), can
be modelled as the superposition of magnetic fields contributed by the four coils (Figure 4-3b).

30
The magnetic field model as in Eq. 9 is computed with respect to the cylindrical coordinates of
each coil, which can be transformed to the global coordinates as follows:
𝐵𝑥 = 𝐵1𝑧 − 𝐵2𝑟 − 𝐵3𝑧 + 𝐵4𝑟,
𝐵𝑦 = −𝐵1𝑟 − 𝐵2𝑧 + 𝐵3𝑟 + 𝐵4𝑧
[𝐵𝑥𝐵𝑦] = [
𝑍1 −𝑅2 −𝑍3 𝑅4𝑅1 𝑍2 −𝑅3 −𝑅4
] [
𝐼1𝐼2𝐼3𝐼4
] [10]
The 𝐵𝑥 and 𝐵𝑦 are the components of magnetic fields along the x-axis and y-axis respectively. The
value of the position related constant 𝑅𝑚 and 𝑍𝑚are summarized in Table 1. Based on Eq. 10, the
magnetic field 𝑩 generated by four coils can be calculated on any given position in the workspace.
Figure 4-3. The coordinate systems of a single current loop and the four-coil setup (a) Schematic
of a single current loop in cylindrical coordinate for the calculation of magnetic field. (b) The
cylindrical coordinate of each coil in the global coordinate.
(a) (b)

31
Table 1. Position related constant 𝑅𝑚 and 𝑍𝑚 for each coil.
Coil 1 Coil 2 Coil 3 Coil 4
Z 𝐷𝑐2+ x
𝐷𝑐2+ y
𝐷𝑐2− 𝑥
𝐷𝑐2− 𝑦
R y -x -y x
* 𝐷𝑐 is the distance between two opposite coils
4.3 Validation of magnetic field modelling
In the magnetic field modelling, the superposition principle is applied to compute the magnetic
field with the assumption that the field generated by each coil is independent with each other.
However, the iron cores can be magnetized by other coils leading to a magnetic field distortion.
As shown in Figure 4-4a, with 2 A applied to one coil, the core of the other three coils got
magnetized and reduced the field attenuation rate. Using ring core instead of a solid core can
significantly reduce the distortion caused by the core magnetization as shown in Figure 4-4c.The
thicker ring has better ability to strengthen the magnetic field; however, it can cause more field
distortion. To find the optimal thickness of the iron core, the core with thickness ranging from
0.1cm to 1.8cm (solid core) was applied to the magnetic field simulation. The magnetic field
strength and the distortion caused error were evaluated. The thickness of the core was set to be 2
mm, as it significantly reduced the field distortion while only resulted in an 8% reduction of the
magnetic field strength in the workspace center compared with the solid iron core as shown in
Figure 4-4 b, and c. With a thickness of 2 mm iron core, the magnetic modelling calculated
results agreed well with the simulation results with 𝑅2 of 0.992 (Figure 4-4b and c).

32
Figure 4-4. Iron cores induced magnetic field distortion (a) Comparison of the magnetic field
generated with air core (left) and solid iron coil (right). (b)(c) The magnetic field strength along
the coil axis inserted with a solid iron core and a ring core. (c) With the solid cores, the opposite
core gets magnetized, leading to a reduction of the field attenuation rate.

33
4.4 Constraints on magnetic field for aggregation confinement
For accurately controlling the aggregation region, an optimal selection of 𝐼𝑚 = [𝐼1, 𝐼2, 𝐼3, 𝐼4] for
each coil based on the targeted region is required. The application of currents needs to ensure
that the targeted region is exposed to a continuously rotating magnetic field; meanwhile the
untargeted region is periodically applied with a weakened magnetic field with field strength
below the 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 that required for maintaining aggregates against the flow.
Based on the magnetic field model Eq.10 together with the dynamic model of magnetic aggregate
Eq. 3, the combinations of the current of each coil 𝐼𝑚 was calculated using the brute-force search.
The current limit was set to be -2 A to 2 A, considering the output limit for the current amplifier.
Considering the current of each coil 𝐼𝑚 varies with time 𝑡 , and the constant 𝑅𝑚 and 𝑍𝑚 are
dependent on the cylindrical coordinate of a point 𝑝. Eq. 10 can be re-written as
𝐵(𝑡, 𝑝) = √𝐵𝑥(𝑡, 𝑝)2 + 𝐵𝑦(𝑡, 𝑝)
2
[𝐵𝑥(𝑝, 𝑡)𝐵𝑦(𝑝, 𝑡)
] = [𝑍1(𝑝) −𝑅2(𝑝) −𝑍3(𝑝) 𝑅4(𝑝)
𝑅1(𝑝) 𝑍2(𝑝) −𝑅3(𝑝) −𝑍4(𝑝)] [
𝐼1(𝑡)𝐼2(𝑡)𝐼3(𝑡)𝐼4(𝑡)
] [11]
where 𝐵𝑥 and 𝐵𝑦 are the magnetic fields along the x-axis and y-axis respectively
To search for the current values that generate aggregation only in the target region 𝑄 by
disassembling the aggregates in disassembly region 𝑈, the following constraints were introduced
in the brute-force search.
(1) A rotating magnetic field is necessary for the aggregation of a magnetic swarm to form the
disk shape. To simplify the constraint, the signals with 90 degrees out of phase are chosen to
generate a rotating magnetic field.
{𝐼𝑖,1(𝑡) = 𝐼 sin(𝜔𝑡)
𝐼𝑖,2(𝑡) = 𝐼 sin(𝜔𝑡 +𝜋
2), 𝑡 ∈ 𝑇𝑖 [12]

34
(2) Sufficiently large magnetic forces among the magnetic particles within the aggregates are
required to maintain aggregates’ integrity and occupy the junctions of blood vessels (or
microfluidic channels) within the specified target region. Thus, the average magnetic field strength
of each point in the target region must be equal to or higher than 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 in every quarter of a
control cycle, 𝑇𝑖.
∑ 𝐵(𝑡, 𝑝) 𝑇𝑖𝑡=0
𝑇𝑖≥ 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 , ∀𝑝 ∈ 𝑄 𝑡 ∈ 𝑇𝑖 [13]
(3) Contrary to the strong inter-particle forces of aggregates in the target region, the inter-particle
forces are required to be weak enough in the non-target region for the unintended aggregates to
loss their integrity and be broken by fluidic drag force at the junctions. The average magnetic field
strength of each point in the non-target region 𝑈𝑖 must be lower than 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 in every quarter of
a control cycle, 𝑇𝑖.
∑ 𝐵(𝑡, 𝑝)𝑇𝑖𝑡=0
𝑇𝑖< 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙, ∀𝑝 ∈ 𝑈𝑖 𝑡 ∈ 𝑇𝑖 [14]
where 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 is the minimum magnetic field strength to resist a given flow rate, 𝑖 =
1, 2, 3, 4 represent each quarter of the rotation of dominant coils, In every quarter of the
cycle, 𝑖, there is a disassembly region 𝑈𝑖. The target region 𝑄 was defined by the desired
center position 𝑃𝑄 and a radius 𝑟𝑄 to form a circular region (Figure 4-5).
To obtain a single solution from the search, an optimization function was added to sort out the
solution that gives the strongest magnetic field in the target region 𝑄, ensuring the aggregates can
resist the given blood flow.
𝑚𝑎𝑥∑𝐵(𝑡, 𝑝)
𝑄
𝑝=1
, ∀𝑡 ∈ 𝑇𝑖 [15]

35
Figure 4-5. Definition of the target region and the non-targeted region in the corresponding ¼
control cycle. The target region 𝑸 was defined by a center position 𝑷𝑸 and a radius 𝒓𝑸. The non-
targeted region was separated into four disassembly regions 𝑼𝟏−𝟒. In every ¼ control cycle, a
corresponding disassembly region was exposed to a magnetic field below 𝑩𝒄𝒓𝒊𝒕𝒊𝒄𝒂𝒍.
4.5 Validation of the control strategy by COMSOL simulation
An offline calculator for determining the profile of currents in each coil is developed within
MATLAB using the mentioned current determination algorithm. For any arbitrary targeted
region defined with a center position and a radius (i.e. 𝑃𝑄𝑟𝑄,), with a defined 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙, the
currents profile for each coil can be computed. The magnetic modelling and current
determination algorithm were validated with COMSOL simulation by comparing the desired
region with simulated results. The COMSOL model was built with the same geometry and
material properties used in mathematical modelling.
An example of validation of the off-line calculator using COMSOL is presented as follows. An
arbitrary targeted region at (1, 0) cm with a radius of 0.5 cm was selected as a targeted region.
The 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 was set for 15mT. These parameters were inputted into the MATLAB off-line
calculator for generating the current profiles for each coil (Figure 4-6a). Then, the magnetic

36
fields generated by such current profile over a control cycle were simulated using the COMSOL
to check if the MATLAB generated current profile can generate a target region that fulfills the all
the contains defined in section 4.3 for aggregation confinement. Overlaying the simulated
magnetic field at each time point throughout a control cycle, the region that is always exposed to
a magnetic field that larger than the 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 was determined as the simulated confined region,
which was compared with the desired targeted region. The simulated results of the magnetic
fields are shown in Figure 4-6b, indicating high agreement of the desired region and the
simulated region, with the variance within 0.1 mm.
Notice that for first and fourth ¼ control cycle, the currents in two dominant coils were
sinusoidal waves with the maximum current of 2A, and the other two coils were used to adjust
the boundary of the 15mT field strength based on the target region position. While in the other
two ¼ control cycles, the currents in two dominant coils were no longer sinusoidal waves. That
is because in these cycles the confined boundaries were very close to the dominant coils, thus the
magnetic field generated by a 2A sinusoidal currents in the dominant coils required large
currents in the auxiliary coil to push the boundary of the 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 to the confined region,
resulting in a high magnetic field in the disassembly region that close to these auxiliary coils.
Therefore the algorithm reduced the currents in the dominant coils according to the constrains
that described in section 4.4 to avoid the formation of unintended aggregation, leading to the
distorted wave shape of currents in the dominant coils during the second and third control cycle
as shown in Figure 4-6a.

37
Figure 4-6. Validation of the MATLAB off-line calculator with COMSOL simulated magnetic
fields over a complete control cycle. (a) The current profile for each coil was generated from the
MATLAB off-line calculator over a complete control cycle. (b) Overlaying the simulated magnetic
field throughout a control cycle, the region where always experience a magnetic strength higher
than 15mT (red dash lines) is overlaps with the desired target region (blue circle).
(a) (b)

38
Chapter 5
System design
5.1 Magnetic particle selection
Magnetic materials can respond differently to an external magnetic field. Ferromagnetic particles
have the highest permeability to an external magnetic field; however, they retain magnetization
after the external field has been removed, leading to uncontrollable aggregations. Paramagnetic
particles, on the other hand, do not retain magnetization when the external field is removed,
while they have relatively weak permeability. Among large varieties of magnetic nanoparticles,
the superparamagnetic particles, typically iron oxide micro-nano-particles such as magnetite
(Fe3O4) and maghemite (γ-Fe2O3), have been most widely used for biomedical use for the
following reason: 1) the superparamagnetic properties allow it strongly respond to external fields
meanwhile reducing the risk of agglomeration when no external magnetic field is applied, and 2)
they have excellent biocompatibility because iron-containing nanoparticles can be metabolized
into ferritin and utilized by the body [50].
For our application, we need appropriate magnetic dipole-dipole interaction to resist the flow
drag force. The magnetic interaction force scales with the volume of the particle and
magnetization of the material with a power of two according to Eq. 4. As the diameters of the
capillaries range from 5 to 12 μm, we only consider the magnetic particles that no larger than 1
um for the safety concern. We chose Dynabeads® MyOne™ beads, due to its high permeability
and highly uniform in size. High permeability ensures the magnetic particles generates
significant dipolar force in a specific magnetic field before reaching the saturated magnetization.
Uniform size ensures the even dipole-dipole interaction in the aggregates which is essential in
the critical B determination (Eq. 4).
5.2 Electromagnetic coil system
In order to form disk shape aggregates of magnetic particles, a system that can generate high
frequency (above 20 Hz) of a rotating magnetic field is required [37]. Electromagnetic coil
systems are commonly used for magnetic swarm control and actuation. The magnetic system was
built of four identical circular electromagnetic coils (Figure 5-1b) that were located along the x
and y axis with 35 mm away from the origin. The coil fixtures were made of thermoplastic

39
polymer (acrylonitrile butadiene styrene) via 3D printing. Each coil was inserted a 2 mm thick
iron ring core with a 30 mm outer diameter. The circular coils were made of 900 turns of 24
AWG magnet wire. Arduino Mega board was used to generate a voltage profile of each coil and
amplified by an amplifier circuit to have a maximum current of ± 2A. The highest magnetic field
of this magnetic system is 35 mT at the origin.
5.3 Imaging stage
To visualize the aggregation in the entire workspace, the magnetic coil system was integrated
with a camera and a translational stage. The camera (Retiga EXi Fast1394; QImaging) was
mounted on the translational stage for controlling the camera position along x and y axis. The
sample stage was surrounded by the magnetic coils and could be adjusted along the z-axis for
focusing. To ensure the image quality, the acrylic boards holding four coils are supported by a
frame, that is separated from the imaging stage to isolate the vibration generated by the coils
during the operation (Figure 5-1a).
5.4 Microfluidic phantom of vasculature networks
The PDMS (Polydimethylsiloxane) microfluidic devices were used to mimic the vascular
structures (Figure 5-1c). The smallest branches are 10 µm wide, which is the mean size of the
capillary. The inlet channel is 80 µm which matches the typical size of the arterial vessels that
feeding a tumour. The average blood velocity in an 80 µm arteriole was measured to be 0.8-10
mm/s, and the flow was reduced to 50-200 μm/s in the capillaries [51]. To mimic the vascular
structure, 256 of 10 µm channels were constructed in 32 identical branching networks. The
distributing channels ensure the magnetic particles and blood can be evenly delivered to each
channel. The device is composed of two inlets, as shown in Figure 5-1c. One inlet is connected
to a syringe pump (Harvard Apparatus Pump 11) to provide continuous blood flow, and the other
inlet is for the introduction of magnetic particles.

40
Figure 5-1. The system setup for magnetic guided active embolization and the design of the
microfluidic device for mimicking vasculature networks. (a) The electromagnetic coil system was
integrated with a translational imaging stage and a syringe pump (b) The electromagnetic coil
system consisted of four identical coils with 2 mm iron ring inserted in each coil. (c) Microfluidic
device for mimicking blood vessels. The 256 of 10 µm channels were constructed in 32 identical
branching networks and connected with the distributing channels to ensure the magnetic particles
and blood can be evenly delivered to each vasculature structure.

41
Chapter 6
Results
6.1 System calibration
6.1.1 Magnetic field modelling calibration
Eq. 10 reveals that the magnetic field of an arbitrary point in the workspace is the resultant of the
magnetic field contributed by each coil. Two parameters in the magnetic field modelling required
experimental calibration as discussed in section 4.2: the mean radius of the coil 𝑎 and
permeability of the core 𝜇. Four coils were calibrated separately. A constant current of 2A was
applied to one coil at a time, and the magnetic field generated along the axis of the coil was
measured by a gaussmeter (Model 410; Lake Shore Cryotronics). By fitting the modelled
magnetic field strength with the measured data, the 𝑎 and the 𝜇 of each core were
calibrated. The results are shown in Table 2, with the coefficient of determination R-squared
over 0.99. Notice that the first measured data point was considered as anomalous data in the
regression fitting (Figure 6-1a). The first value is eliminated because it was measured on the
surface of the iron ring core, where the distortion was not considered in the magnetic field
modelling.
Table 2. Calibrated parameters in the magnetic field modelling.
Coil 1 Coil 2 Coil 3 Coil 4
a (µm) 2.75 2.70 2.78 2.69
µ (H/m) 2.96e-3 3.03e-3 2.78e-3 3.43e-3
Determination of Effective Workspace
To validate the magnetic field model, the magnetic field in the workspace generated by an
arbitrary current profile was measured and compared to the values calculated using the model
(Eq. 10). 2A (i.e. maximum currents of the system) were applied to two adjacent coils to exam
the maximum magnetic field distortion can be generated in the aggregation confinement control

42
for the determination of the size of the effective workspace. Figure 6-1b shows the mapping of
the magnetic field 𝐵 that calculated from the model and measured in the experiment. The error
was defined as the difference between the measured values and the calibrated-model values. The
quantified error was within 10% in the circular region of 20 mm radius from the center of the
system. In the magnetic field model, the magnetization of the iron cores was not considered. The
distortion caused by the iron ring cores was the main source of the error. As discussed in section
4.3, iron ring core can significantly reduce the core magnetization induced field distortion;
however, close to the edges of the ring cores, the distortion is inevitable, resulting in the
limitation in size of the effective workspace. The circular region of 200 mm from the center was
chosen to be the effective workspace based on the quantified error map, ensuring the error would
be within 10% in the effective workspace.
(a)
(b)

43
Figure 6-1. (a) A representative calibration curve of the magnetic field generated by a single coil.
The measured magnetic field strength was fitted into the magnetic field model along the coil axis
and fitted to the magnetic modelling to calibrate the mean radius of the coil 𝒂 and permeability of
the core 𝝁. (b) Determination of effective workspace. Magnetic field computed by the magnetic
field model and the experimental measured magnetic field strength in the workspace. The error
was less than 10% within the circle in the field error map
6.1.2 Determination of frequency of the rotating magnetic field
The formation of magnetic aggregates in a rotating magnetic field with different frequency in
both static and flow environment were studied. The shape of an aggregate is determined by the
equilibrium of magnetic force and hydrodynamic force on that aggregate. In a flow-less liquid
environment, the aggregation was formed within a rotating rod shape when the frequency of the
external magnetic field was lower than 5 Hz. When exposed to a higher frequency, the rod shape
aggregates started to periodically break-up and reassemble due to the increase in the fluid-
induced viscous torque 𝑇𝑣𝑖𝑠𝑐𝑜 = −8𝜋𝜂𝜔𝑟3 (r is the equivalent radius of the aggregate and η is
the fluid viscosity, ω is the angular frequency). With a rotating magnetic field from 20 Hz to 40
Hz, compact disk shape aggregates were formed. While over 40Hz, the aggregates were formed
in a long-chain shape because the rotation of the aggregates couldn't catch up the rotation of the
external field, which was described as the step-out rotating phenomenon in [40].
The aggregation formation in flow was tested in the microfluidic device with a flow rate of 80
μm/s. Similar to in a flow-less liquid environment, the aggregates rotated into a rod shape in the
low frequency rotating magnetic field. The increment in rotating frequency led to a decrease in
the length of the rod due to the increment of viscous torque. When exposed to a frequency of
around 20 Hz, disk shape aggregates were observed with the presence of rod shape aggregates.
Over 30 Hz, only compact disk shape aggregates were observed. Different from in a flow-less
liquid environment, the rotation of the aggregates was much slower than the frequency of applied
rotating magnetic field in the high fluidic flow. Under the same rotating frequency, a high fluidic
flow will induce a higher velocity gradient around the rotating aggregate than in flow-less liquid
environment, leading to a higher viscous torque (i.e., based on the general expression of viscous
torque T=µdv/dy, the viscous torque in the same liquid depends on the flow velocity gradient
around the aggregate). In Figure 6-2a, the shape of the aggregate was quantified in term of its

44
aspect ratio (i.e., length to width), where the aspect ratio of 1 corresponds to the shape of a
perfect round disk and an aspect ratio higher than 1 represents a more elongated shape.
The hysteresis loss caused by the magnetization and demagnetization of the coil core increases
with the rotating frequency increases, 𝑃 = 𝜂 ∗ 𝐵𝑛𝑚𝑎𝑥 ∗ 𝑓 ∗ 𝑉 (η is the material dependent
Steinmetz hysteresis coefficient, 𝐵𝑚𝑎𝑥 is the maximum field strength, 𝑓 is rotating frequency,
and V is the volume) [52]. Therefore, 30 Hz was selected for generating the disk-shape
aggregates while minimizing the energy losses during the conversion between electrical power
and mechanical power.
6.1.3 Determination of the critical B
As mentioned in section 4.3, the aggregation region confinement is achieved by controlling the
boundary of the critical magnetic field 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙, which is the minimum magnetic field required to
generate sufficient interaction force to remain aggregation in a certain flow rate. The critical
magnetic field required to resist a given flow rate was determined based on the developed dynamic
model of the magnetic aggregate. Using Eq. 3, the relationship between the flow rate and the
minimum magnetic field required 𝐵𝑐𝑟𝑖𝑡𝑖𝑐𝑎𝑙 was computed. However, this relationship requires
further calibration as the magnetic moment of the magnetic particles used in Eq. 3 was estimated
using the M-H curve provided on the website of ThermoFisher. The magnetic moment was
calibrated in a rotating magnetic field of 20 mT by comparing the maximum flow rate computed
by the dynamic model and the flow rate measured experimentally. The calibration showed a ratio
of 1.2 and was applied to Eq. 3 as a correction factor.
The dynamic model was then validated with the experimental results. In experiments, different
magnetic field strengths were applied at a rotating frequency of 30 Hz, and the flow rate applied
to the channel was slowly increased to determine the highest resistible flow rate of magnetic
aggregates. Figure 6-2c shows the modelled results and experimentally measured results fitted well
with a coefficient of determination 𝑅2 of 0.978.
For the upcoming experiment, the flow rate was chosen to be 80 μm/s , which was physiologically
relevant to the blood flow in the tumour vessel [51] and corresponded to a critical magnetic field
of 15 mT. The frequency of the rotating magnetic field generated by dominant coils in each cycle

45
was set to be 30 Hz. The period of a complete cycle T was set to be 12 s because the aggregates
disassembled in 3s (i.e., ¼ T) in the disassembly region from experiment observation.
Figure 6-2. (a) Frequency response of the magnetic aggregate in the flow. The respect ratio is the
length of the aggregate over its width. Only disk-shape aggregates were observed over 30 Hz (blue
region). (b) Snapshots of the aggregates formed under different driving frequencies of the rotating
magnetic field under a flow rate of 80 μm/s. (c) The flow rate can be resisted by an aggregate under
different strength of a rotating magnetic field. Error bars represent the SDs from three independent
measurements.
6.2 Performance of magnetic aggregation confinement control
The accuracy of the aggregation spatial confinement control was evaluated in terms of the
confinement radius 𝑟𝑄 and positioning of the confinement center 𝑃𝑐. A microfluidic device with
parallel branching channels as shown in Figure 6-3b was used. The control accuracy of the

46
confinement radius was evaluated from 0 mm to 20 mm, with a center position of (0,0). The profile
of the currents was generated by setting the desired radius in the model based on Eq.7-11. The
channel arrays were aligned along the x=0 or y=0 axis of the workspace. The channels with
aggregates accumulated were identified as the confined region and the radius of the confined
region was then quantified. Figure 18a shows that experimentally determined radii and modelled
radii (i.e., desired radius) fitted well with a coefficient of determination 𝑅2 of 0.941. The radii
above 4 mm were preferred as the accuracy was above 90%. The error in radius control is because
the magnetic field is consciously attenuated with the distance away from the dominant coils,
resulting in a blurry boundary of the confinement region. For example, with 1 mm from the
boundary, the magnetic field B decreases about 5%, resulting in a decrease of dipole force less
than 10%; while with 3 mm from the boundary, the magnetic force reduced over 20% resulting in
a decrease of about 40% in bead attraction force ( in radius control, 𝑟𝑄 =10 mm).
Then we evaluated the accuracy of poisoning the aggregation inside the workspace. Four
representative positions (e.g., (𝒙𝒄,𝒚𝒄)=[(0,0) (0,1) (1,0) (0.5,0.5)] were chosen (Figure 6-3b). The
aggregation confinement radius was set to be 6 mm. During the experiment, the device was
positioned across the desired position and in parallel to the x-axis. The aggregation region was
measured to identify the center position 𝒙𝒄, then the device was aligned in parallel to y-axis
across the desired position for identification of the center position 𝒚𝒄. The measurement of the
center of the confined region in each position was conducted 3 times and the results were plotted
in Figure 6-3b. The experimentally determined center position and modelled center position had
a root mean square error of 0.74 mm. Large errors were observed further from the workspace
center which potentially caused by magnetic field distortion as mentioned in section 4.3 and the
variance of magnetic gradient at the boundary of confinement region.

47
Figure 6-3 Performance of aggregation spatial confinement control. The control accuracy was
evaluated in terms of the radius (a) and the position (b) of the confinement region. Error bars
represent the SDs from three independent measurements. Error bars represent the SDs from three
independent measurements
6.3 Magnetic particles’ functionalization for embolization
The aggregation can accumulate at the junction of the vessels but cannot completely stop the
blood flow due to the limited drag force that can be resisted by the magnetic dipole-dipole
interaction. To enhance the bead-bead attraction force, we functionalized the bead for additional
adhesion.
6.3.1 Functionalization group selection
A coating that can provide an additional adhesive force between the particles is demanded. The
force should be high enough for the aggregation to stop the flow; meanwhile, it should be low
enough so that the aggregate in the non-target region can be disassembled by the flow. Three
types of the coating were tested. The first one used covalent bonding, such as peptide bonds. The
second one used hydrogen bonds, such as streptavidin-biotin interaction. And the third strategy
used clotting factors such as thrombin to trigger the formation of the blood clot to stop the blood
flow.
(a) (b)

48
To ensure the interaction force is not too large for flow to disassemble the aggregates in the non-
target region, a preliminary test was conducted to estimate the bonding force. For each coating,
the suspension of the coated particles was first exposed to a rotating magnetic field for 9 seconds
(i.e., ¾ T), which was the time of the magnetic particles aggregate in the unintended region in a
control cycle. Then a large flow (around 0.1 m/s at the opening of pipette tip) was introduced by
a 1000uL pipette to disassemble the aggregate. If the aggregates remained assembled, the
interaction force was identified to be too large to be applied for aggregation confinement control.
The peptide bonds were formed by mixing the amino group coated beads with COOH coated
beads. The aggregation was formed even without the application of the magnetic field; therefore,
it is not suitable for the aggregation confinement control. The formation of streptavidin-biotin
binding between beads was achieved by adding biotinylated anti-streptavidin (BioLynx Inc.) into
the suspension of the streptavidin-coated bead. No aggregation was observed in a low
concentration of the biotinylated anti-streptavidin (0.0125 ng/ml) without the application of the
magnetic field. After the magnetic field is removed, however, the aggregation remained its
entity, which could not be disassembled by the pipette induced flow as described above.
Different concentrations of the biotinylated anti-streptavidin were tested, and the results showed
that its concentration only determined the size of the aggregation. Once the bond was formed, the
aggregates would not be disassembled by the drag force anymore. Therefore, the streptavidin-
biotin bonding is also not suitable for our control strategy.
The third coating material was thrombin, a clotting factor that triggers the blood clotting cascade.
Thrombin is an enzyme that converts soluble fibrinogen in the blood to insoluble strands of
fibrin to form the fibrin mesh that causes the formation of the blood clot (Figure 6-4a) [53]. It
has been commonly utilized in clinical treatment for hemostasis and pseudoaneurysm. In the
clinical treatment, thrombin with a concentration of 50-1000 U/mL is directly injected into the
pseudoaneurysm or bleeding site to stop bleeding[54]. In our study, the magnetic particles were
coated with thrombin in the following procedures. The tosyl-activated superparamagnetic beads
(1um diameter; Myone, Dynal Biotech) were washed with phosphate buffered saline (PBS),
reconstituted in carbonate buffer (pH 9.4), and combined with thrombin (Thrombin from bovine
plasma; Sigma-Aldrich) in a 0.1% bovine serum albumin (BSA; Bioshop). After incubation for
48 h at 4 ºC, the beads were washed with 0.1% BSA in PBS and resuspended in 100 ml of the
0.1% BSA solution. This protocol was modified from [55]. The thrombin-coated beads were

49
mixed with diluted blood to test if the thrombin coating was suitable for the aggregation
confinement control. Fibrinogen was added to the diluted blood to reconstruct the concentration
of the fibrinogen to be 4 mg/ml, that found in the human body. The same experiment described
above was conducted. After exposing to a rotating magnetic field for 9 s, the beads coated with a
low concentration of the thrombin (1 U) could be disassembled into single particles by the
pipette induced flow. While, the aggregates formed in 9s with a high concentration of thrombin
coating (50 U) could not be disassembled by the flow, indicating that the thrombin coated
magnetic particles have a great potential to serve as an active embolic agent, while optimization
of the coating concentration is required.
6.3.2 Determination of thrombin coating concentration
The observation mentioned in Section 6.3.1 indicated that the concentration of thrombin coating
on the bead surface regulated the fibrinogen conversation rate and determined the bonding
strength. Therefore, it is essential to find an optimal coating concentration so that the thrombin
coated beads can be used for the aggregation region confinement strategy, meanwhile,
adequately react with the fibrinogen in blood flow to occlude the vessel. We examined the
coating concentration from 0.05 U to 20 U in the microfluidic device and compared the time
required for a clot to build up to affect the flow in the target region. The performance of
aggregates in the non-target region was also examined. Under the coating concentration of 3 U,
no disturbance of the flow is observed after 20 mins of the treatment. While above 5 U, the
aggregation cannot be disassembled by the flow leading to the formation of unintended
inclusion. We eventually chose 4 U coating, with such coating concentration, it took around 30 s
to form irreversible aggregation, giving enough time for the unintended aggregation to be
disassembled and took around 3 mins to disturbance to the flow.

50
Figure 6-4. The fibrin crosslinking with the thrombin-coated beads by changing the fibrinogen
conformation. (a) The schematic of the interaction of the thrombin and fibrinogen. Thrombin
converts fibrinogen into fibrin, and as a result the fibrin molecules aggregate into a mesh structure.
The mesh can trap platelets and other blood cells to form blood clots. (b) SEM image of the
thrombin coated magnetic aggregates that reacted in blood for 10 mins. The zoom-in image shows
the mesh structure of fibrin that covers the surface of the magnetic particles.
6.4 In-vitro embolization in microchannel phantom
The aggregation confinement control was applied to perform embolization in a microfluidics-
based phantom of a superficial vascular network made with PDMS. To mimic the vascular
structure, the vascular network was designed to have an inlet channel (width of 80 µm) and
distributed into 32 vascular structure units. Each unit consisted of eight junctions from a 20 µm
channel to two 10 µm channels. The device setup is shown in Figure 5-1c. One inlet is for the
supply of blood flow, and the other one is for the introduction of the thrombin coated beads.
In the experiment, the aggregation confinement radius and center position were set to be 1 cm at
the workspace center. To enhance the visibility of magnetic particles, mice’s blood was diluted
(a)
(b)

51
1:2 with phosphate-buffered saline to lower the concentration of the red blood cells and
reconstituted the fibrinogen concentration to 5 ug/mL (Fibrinogen from bovine plasma; Sigma-
Aldrich) to maintain the fibrinogen level the same as the fresh blood before the dilution. The
diluted mice’s blood was then simultaneously injected with thrombin-coated magnetic particles
(1 × 1011particles/ mL) into the microchannels. The flow rate of the fluid in the channel was
determined by measuring the speed of the red blood cells that passing through.
Figure 6-5c shows that the flow rate of the fluid in the target region decreased to around zero
after 5 mins of magnetic field application, while the flow rate in the non-target region remained
the same as supplied. In the targeted region, the flow rate reduced slowly over time indicated the
gradual reaction between thrombin and fibrinogen for the formation of the clot. Figure 6-4b is an
SEM (scanning electrical microscope) image of the clot generated by an aggregate of 4U-
thrombin coated magnetic particles in blood for 5 mins. The aggregates were fixed with 4%
paraformaldehyde, 0.4% glutaraldehyde in 0.2 M sodium cacodylate buffer, and the sample was
dehydrated in an ascending series of ethanol and dried using acetone. Finally, the sample was
sputtered with a thin layer of gold palladium for SEM imaging [56]. Figure 6-4b shows that the
fibrin mesh was formed and spread on the surface of the magnetic particles and trapped the red
blood cells to form larger aggregates that accelerate the vessel occlusion process.
These results indicated that aggregation confinement control could be used to aggregate
magnetic swarm and hold the aggregates for polymerization of fibrin in the target region, while
the aggregates in the non-target region were disassembled in every cycle hence no aggregation
was accumulated long enough to induce the occlusion of the channel.

52
Figure 6-5. The embolization experiment in vitro with microchannel phantom. (a) The magnetic
aggregates in the target region and non-target region over a complete control cycle T under a
flow rate of 80 µm/s. In the target region, the aggregate formed and stayed at the vessel’s
junction while the aggregates formed in the non-targeted region were dissembled by the flow
within ¼T cycle. (b) The flow rate of the channels in the target region and the non-targeted
region after 5 mins of treatment. Error bars represent the SDs from three independent
measurements, p = 0.012 < 0.05. (c) Representative plot showing flow rate changed over time
after the aggregate formed at the junction of the channel. The flow rate started decreasing after
40 s and the fibrin clot gradually reduced the flow rate to 10 μm/s in 150s.

53
6.5 Ex-vivo embolization
Real vessels have very different mechanical properties and geometries as the microfluidic
device. For example, the PDMS material used for the microfluidic devices is much stiffer than a
real tissue, with the Young’s modulus on the order of MPa for PDMS (for the 1:10 mixing
ratio)[57] compared to kPa for real tissue [58]. Moreover, the cross-sections of the microfluidic
channels are rectangle, whereas the blood vessels are circular. Therefore, the active embolization
was tested in real vascular structures. The porcine heart and the porcine greater omentum that
consisted of rich vascular networks were used.
6.5.1 Heart
The porcine heart was selected due to its abundant superficial vessels. In addition, it has large
arteries that can be directly connected to a plastic connector for introducing a constant flow via a
syringe pump. The challenge of using the porcine heart as an ex-vivo sample was to visualize the
magnetic aggregates inside the blood vessels. For an opaque object like the heart tissue, top
lighting (incident lighting) was first tried; However, the tissue was in dark red which had a
similar colour to the magnetic particles and the blood, therefore it was very challenging to
distinguish the aggregates in blood from the tissue background. Then, transmitting light was
tried, and the tissue was cut into a thin sheet to ensure the light can pass through the tissue
(Figure 6-6a), providing good contrast between the tissue and the magnetic aggregates. The
process of the aggregation formation was observed inside the heart arteriole (Figure 6-6b).
However, the superficial vessels were relatively large (1-2 mm) and the small capillaries that we
targeted were embedded in the deep tissue due to the structure of the heart, making the
visualization of the aggregation in capillaries very difficult. Therefore, porcine heart tissue was
not suitable for testing the aggregation confinement control.
6.5.2 Omentum
The aggregation confinement control was applied to perform embolization in a porcine greater
omentum. The greater omentum is a fold of visceral peritoneum that hangs down from the
stomach and is suggested to be a “fertile soil” for cancer growth [59]. It consists of a trabecular
framework of vessels that can be observed under the microscope. Different from heart arteriole,
the vessels in the omentum is very thin and fragile, which makes it very challenging to connect it

54
to the syringe for introducing flow and magnetic beads. Therefore, we introduced the solution
from the left gastro-omental artery and used blood vessel clamps to clamp the vessels that go into
the stomach as well as the far end of the artery. In such way, the introduced liquid went into the
vascular networks of the omentum.
In the experiment, the greater omentum was harvested from a pig injected with heparin that
prevented blood clotting in the sample. The greater omentum was then washed and flushed with
sodium chloride 0.9 % before the experiment. The greater omentum was placed in the workspace
and frequently sprayed with phosphate-buffered saline to keep it moist as it is prone to drying and
collapses when exposed to air. Fresh heparin-free porcine blood was mixed 1:1 with thrombin-
coated magnetic particles (1 × 1011 particles/ mL) of thrombin-coated magnetic beads, and then
injected into the greater omentum from the gastroepiploic artery at a flow rate of 80 µm/s.
The ex-vivo results show that aggregation formed in the vessel’s junctions within 10 s (Figure
6-6d) of magnetic field application, which is comparable to the in-vitro experiment. After 10 mins
of application of the magnetic field, the bead-blood mixture was replaced by a blue dye solution.
The vasculature gradually turned into blue except the targeted vessel which remained red,
indicating the occlusion of the targeted vessel caused by the thrombin coated magnetic aggregates
(Figure 6-6e).

55
Figure 6-6. The ex-vivo embolization experiment with the porcine heart and the porcine greater
omentum (a) The slice of porcine heart connected to a plastic connector for flow supply. (b) The
aggregates formed inside the arterial of the porcine heart under a 30 Hz rotating magnetic field.
Scale bar = 100 μm. (c) The set up for embolization in the porcine greater omentum. (d) The
magnetic particles aggregated in the blood vessel’s junction (white arrow) of the porcine greater
omentum. Scale bar = 40 μm. (e) The blood flow was replaced by blue dye after 10 mins of
application of rotating magnetic field targeted at the black circle. The targeted vessel did not turn
into blue indicating the occlusion of the vessel. Scale bar = 5 mm.

56
Chapter 7
Conclusion and future work
7.1 Conclusion
In this thesis, we present a magnetic swarm control strategy to control the magnetic
particles to assemble and accumulate in the desired confined region inside the vascular structure
within a flow environment. Compared to the traditional swarm control strategy that uses a uniform
magnetic field to control all the particles in the workspace synchronically, our system used a non-
uniform magnetic field for spatial selective actuation of the magnetic particles. Moreover, to
overcome the challenge of the high magnetic field induced aggregation in the periphery region,
the magnetic field in those regions was controlled to switch off periodically, leaving only the
desired region always exposed to a magnetic field strong enough to resist the flow. while the
magnetic field of the non-target region is attenuated periodically so that the aggregates in the
untargeted region were disassembled by the flow drag force.
In our control strategy, the rotating magnetic field was chosen for the formation of disk
shape aggregation to resist flow in a complex vasculature. The dynamic model of magnetic
aggregate was established for the determination of the minimum magnetic field strength that
demanded to generate sufficient magnetic dipole-dipole interaction for resisting certain flow rate.
Magnetic field modelling of a single iron ring inserted electromagnetic coil was studied. With the
superposition principle, the magnetic field generated by the four-coil system on the x-y plane was
established. The criteria for the magnetic field to form a confined aggregation region was discussed.
The algorithm to determine the currents in each coil was proposed based on the exhaustive search
method to ensure the criteria were fulfilled. With the inputs of the radius and center position of the
desired aggregation region as well as the flow rate in the vessels, the currents profile in each coil
was determined. The aggregation spatial confinement control achieved a RMSE 0.74 mm position
accuracy and a radius accuracy over 90%.
For embolization, the magnetic particles were coated with thrombin to locally trigger the
clotting effect, which enabled complete occlusion of the blood vessel. The optimal coating
concentration and procedure were investigated for the aggregation to induce targeted embolization
effectively (in our study is 5-10 mins), meanwhile ensuring the unintended aggregation in the non-

57
target region was disassembled. The aggregation confinement control was applied both in-vitro
using microchannel phantoms and ex-vivo using the porcine greater omentum for active
embolization. The results showed that swarms of thrombin-coated magnetic particles aggregated
and occluded the target region under a flow of 80 µm/s, without affecting the flow in the non-
target region.
7.1 Future work
Several physiologically relevant environmental conditions were considered in the swarm
control system described in this thesis and were applied to the demonstration of embolization
using the magnetic particles, including the vascular structures and blood flow. To broaden the
applications of the proposed swarm control system, more environmental conditions need to be
considered with further investigation. For example, the maximum resistible flow rate of the
proposed system is around 100 μm/s; however, the flow rate in the capillaries can range from 50
μm/s to 2 mm/s depending on the organ and the size of the tumour. Therefore, the strength of the
magnetic interaction force demands improvement, which can potentially be achieved by
increasing the power of the electromagnetic coil and using the magnetic particle with higher
magnetic permeability and saturation magnetization.
In addition, this thesis is an exploration of the magnetic spatial confinement strategy, and
the proof-of-concept experiments were conducted on a 2D plane only. However, the vasculature
of tumour in vivo is in 3D and active clinical embolization of the tumour also requires operation
in 3D setting. This requires further investigation in expanding the current control strategy from
2D to 3D. Two strategies might be used for expanding the magnetic control with additional
dimension: 1) implementation of an additional pair of electromagnetic coils [40], and 2) enabling
the displacement of the electromagnets to add one more degree of freedom in the control space
[60][61]. For the first strategy, one more pair of electromagnetic coils can be added along the z-
axis. The magnetic field modelling described in section 4.2 needs adjustment for computation of
magnetic field in a volume by extending the position related constant matrix from 2 by 4 to 3 by
6. The current determination objective and constraints remain the same, expect the computation
should base on a target volume instead of a 2D target region as developed in this thesis. One
limitation of such set-up is the size of the new workspace, as it would be restricted to the
confined and closed space that restricts the size of the sample. The second strategy requires

58
controlled motion of the coil in the z-axis with the four-coil system, which was used in this thesis
to confine the aggregation region in the x-y plane. Therefore, the new set-up as in the second
strategy would generate a confined cylindrical volume in the 3D space with the height dependent
on the geometry of the coils. Additionally, the coils can be moved step by step along the z
direction to achieve aggregation confinement control to embolize only a portion of the target
volume in each step to control the embolization ultimately in a larger volume. For accurate
aggregation control in the z direction, the 3D modelling of the magnetic field generated from the
four-coil system should be carefully investigated and the confined volume in each z-step needs to
be precisely identified.
In this thesis, all the control is open-loop, which requires precise calibration and
measurement of the system setup and the flow rate in channels. The advantage of open-loop
control is that it does not require real-time visual feedback, which is critical for biomedical
application where real-time imaging is currently slow and difficult to obtain. However, with the
development of advanced imaging techniques such as ultrasound Doppler imaging [62] and x-ray
imaging [63], closed-loop control strategies could be investigated for more precise embolization
applications, which is essential for minimizing the relevant complications. The integration of the
magnetic actuation with advanced imaging system should also be considered in the future study.
Furthermore, the proposed magnetic aggregation confinement control system can be
applied to applications beyond active embolization, such as general drug delivery. Guided by an
external magnetic field, the drug-coated magnetic particles can accumulate around the targeted
tissue deep in the body. The particles accumulated in the target region can significantly enhance
doses of the chemotherapeutic agent in the target tissue with a reduced overall dose by avoiding
rapid clearance by the circulatory system [64].

59
References
[1] S. Schuerle et al., “Synthetic and living micropropellers for convection-enhanced
nanoparticle transport,” Sci. Adv., vol. 5, no. 4, p. eaav4803, Apr. 2019.
[2] S. Vaidya, K. R. Tozer, and J. Chen, “An overview of embolic agents,” Semin. Intervent.
Radiol., vol. 25, no. 3, pp. 204–215, Sep. 2008.
[3] A. Rammohan et al., “Embolization of liver tumors: Past, present and future,” World J.
Radiol., vol. 4, no. 9, pp. 405–412, Sep. 2012.
[4] K. V Sharma et al., “Long-term biocompatibility, imaging appearance and tissue effects
associated with delivery of a novel radiopaque embolization bead for image-guided
therapy,” Biomaterials, vol. 103, pp. 293–304, 2016.
[5] H. L. Wang, C. Y. Xu, H. H. Wang, and W. Xu, “Emergency transcatheter arterial
embolization for acute renal hemorrhage,” Med. (United States), vol. 94, no. 42, p. e1667,
2015.
[6] T. P. Smith, “Embolization in the external carotid artery,” J. Vasc. Interv. Radiol., vol. 17,
no. 12, pp. 1897–912; quiz 1913, 2006.
[7] M. A. Lazzaro, A. Badruddin, O. O. Zaidat, Z. Darkhabani, D. J. Pandya, and J. R. Lynch,
“Endovascular embolization of head and neck tumors,” Front. Neurol., vol. 2, p. 64, Oct.
2011.
[8] H. Arami, A. Khandhar, D. Liggitt, and K. M. Krishnan, “In vivo delivery,
pharmacokinetics, biodistribution and toxicity of iron oxide nanoparticles,” Chem. Soc.
Rev., vol. 44, no. 23, pp. 8576–8607, 2015.
[9] V. V Mody, A. Cox, S. Shah, A. Singh, W. Bevins, and H. Parihar, “Magnetic
nanoparticle drug delivery systems for targeting tumor,” Appl. Nanosci., vol. 4, no. 4, pp.
385–392, 2014.

60
[10] K. Ulbrich, K. Holá, V. Šubr, A. Bakandritsos, J. Tuček, and R. Zbořil, “Targeted Drug
Delivery with Polymers and Magnetic Nanoparticles: Covalent and Noncovalent
Approaches, Release Control, and Clinical Studies,” Chem. Rev., vol. 116, no. 9, pp.
5338–5431, May 2016.
[11] S. Nigam and D. Bahadur, “Doxorubicin-loaded dendritic-Fe3O4 supramolecular
nanoparticles for magnetic drug targeting and tumor regression in spheroid murine
melanoma model,” Nanomedicine Nanotechnology, Biol. Med., vol. 14, no. 3, pp. 759–
768, 2018.
[12] J. H. Park, G. Saravanakumar, K. Kim, and I. C. Kwon, “Targeted delivery of low
molecular drugs using chitosan and its derivatives,” Adv. Drug Deliv. Rev., vol. 62, no. 1,
pp. 28–41, 2010.
[13] L. Sanz-Ortega, J. M. Rojas, A. Marcos, Y. Portilla, J. V Stein, and D. F. Barber, “T cells
loaded with magnetic nanoparticles are retained in peripheral lymph nodes by the
application of a magnetic field,” J. Nanobiotechnology, vol. 17, no. 1, p. 14, 2019.
[14] H. Xie et al., “Reconfigurable magnetic microrobot swarm: Multimode transformation,
locomotion, and manipulation,” Sci. Robot., vol. 4, no. 28, 2019.
[15] J. Yu, B. Wang, X. Du, Q. Wang, and L. Zhang, “Ultra-extensible ribbon-like magnetic
microswarm,” Nat. Commun., vol. 9, no. 1, p. 3260, 2018.
[16] K. P. Ivanov, M. K. Kalinina, and Y. I. Levkovich, “Blood flow velocity in capillaries of
brain and muscles and its physiological significance,” Microvasc. Res., vol. 22, no. 2, pp.
143–155, 1981.
[17] S. Schuerle et al., “Synthetic and living micropropellers for convection-enhanced
nanoparticle transport,” Sci. Adv., vol. 5, no. 4, 2019.
[18] J. M. Seely, “Management of Breast Magnetic Resonance Imaging-Detected Lesions,”
Can. Assoc. Radiol. J., vol. 63, no. 3, pp. 192–206, 2012.
[19] C. Embolization, “Catheter embolization,” J. Japanese Stomatol. Soc., vol. 33, no. 3, pp.
474–485, 1984.

61
[20] K. Osuga et al., “Current status of embolic agents for liver tumor embolization,” Int. J.
Clin. Oncol., vol. 17, no. 4, pp. 306–315, 2012.
[21] P. Ryan and E. Diller, “Five-degree-of-freedom magnetic control of micro-robots using
rotating permanent magnets,” in 2016 IEEE International Conference on Robotics and
Automation (ICRA), 2016, pp. 1731–1736.
[22] A. J. Giustini, A. A. Petryk, S. M. Cassim, J. A. Tate, I. Baker, and P. J. Hoopes,
“MAGNETIC NANOPARTICLE HYPERTHERMIA IN CANCER TREATMENT,”
Nano Life, vol. 1, no. 1n02, p. 10.1142/S1793984410000067, Mar. 2010.
[23] R. Zhou and C. Wang, “Microfluidic separation of magnetic particles with soft magnetic
microstructures,” Microfluid. Nanofluidics, vol. 20, no. 3, p. 48, 2016.
[24] C. Alexiou et al., “Cancer therapy with drug loaded magnetic nanoparticles—magnetic
drug targeting,” J. Magn. Magn. Mater., vol. 323, no. 10, pp. 1404–1407, 2011.
[25] J.-M. Jia et al., “Control of cerebral ischemia with magnetic nanoparticles,” Nat. Methods,
vol. 14, p. 160, Dec. 2016.
[26] P. Kheirkhah et al., “Magnetic Drug Targeting: A Novel Treatment for Intramedullary
Spinal Cord Tumors,” Sci. Rep., vol. 8, no. 1, p. 11417, 2018.
[27] S. Denyer et al., “Magnetic kyphoplasty: A novel drug delivery system for the spinal
column,” PLoS One, vol. 13, no. 7, p. e0201402, Jul. 2018.
[28] M. D. Tehrani, M. O. Kim, and J. Yoon, “A Novel Electromagnetic Actuation System for
Magnetic Nanoparticle Guidance in Blood Vessels,” IEEE Trans. Magn., vol. 50, no. 7,
pp. 1–12, 2014.
[29] A. K. Hoshiar, T.-A. Le, F. U. Amin, M. O. Kim, and J. Yoon, “Studies of aggregated
nanoparticles steering during magnetic-guided drug delivery in the blood vessels,” J.
Magn. Magn. Mater., vol. 427, pp. 181–187, 2017.
[30] Y. Tadir, W. H. Wright, O. Vafa, T. Ord, R. H. Asch, and M. W. Berns, “Force generated
by human sperm correlated to velocity and determined using a laser generated optical

62
trap,” Fertil. Steril., vol. 53, no. 5, pp. 944–947, 1990.
[31] H. Xu, M. Medina-Sánchez, V. Magdanz, L. Schwarz, F. Hebenstreit, and O. G. Schmidt,
“Sperm-Hybrid Micromotor for Targeted Drug Delivery,” ACS Nano, vol. 12, no. 1, pp.
327–337, Jan. 2018.
[32] J. Zhou et al., “The Semen pH Affects Sperm Motility and Capacitation,” PLoS One, vol.
10, no. 7, pp. e0132974–e0132974, Jul. 2015.
[33] U. Wegmann, A. L. Carvalho, M. Stocks, and S. R. Carding, “Use of genetically modified
bacteria for drug delivery in humans: Revisiting the safety aspect,” Sci. Rep., vol. 7, no. 1,
p. 2294, 2017.
[34] O. Felfoul et al., “Magneto-aerotactic bacteria deliver drug-containing nanoliposomes to
tumour hypoxic regions,” vol. 11, no. November, 2016.
[35] A. Servant, F. Qiu, M. Mazza, K. Kostarelos, and B. J. Nelson, “Controlled In Vivo
Swimming of a Swarm of Bacteria-Like Microrobotic Flagella,” Adv. Mater., vol. 27, no.
19, pp. 2981–2988, 2015.
[36] S. Jeon et al., “Magnetically actuated microrobots as a platform for stem cell
transplantation,” Sci. Robot., vol. 4, no. 30, 2019.
[37] T. O. Tasci, P. S. Herson, K. B. Neeves, and D. W. M. Marr, “Surface-enabled propulsion
and control of colloidal microwheels,” Nat. Commun., vol. 7, p. 10225, Jan. 2016.
[38] D. Ahmed, T. Baasch, N. Blondel, N. Läubli, J. Dual, and B. J. Nelson, “Neutrophil-
inspired propulsion in a combined acoustic and magnetic field,” Nat. Commun., vol. 8, no.
1, pp. 1–8, 2017.
[39] B. Yigit, Y. Alapan, and M. Sitti, “Programmable Collective Behavior in Dynamically
Self-Assembled Mobile Microrobotic Swarms,” Adv. Sci., vol. 6, no. 6, p. 1801837, Mar.
2019.
[40] J. Yu, L. Yang, and L. Zhang, “Pattern generation and motion control of a vortex-like
paramagnetic nanoparticle swarm,” Int. J. Rob. Res., vol. 37, no. 8, pp. 912–930, Jul.

63
2018.
[41] A. Kaiser, A. Snezhko, and I. S. Aranson, “Flocking ferromagnetic colloids,” Sci. Adv.,
vol. 3, no. 2, 2017.
[42] H. Massana-Cid, F. Martinez-Pedrero, E. Navarro-Argemí, I. Pagonabarraga, and P.
Tierno, “Propulsion and hydrodynamic particle transport of magnetically twisted colloidal
ribbons,” New J. Phys., vol. 19, no. 10, 2017.
[43] J. Yu, T. Xu, Z. Lu, C. I. Vong, and L. Zhang, “On-Demand Disassembly of Paramagnetic
Nanoparticle Chains for Microrobotic Cargo Delivery,” IEEE Trans. Robot., vol. 33, no.
5, pp. 1213–1225, 2017.
[44] E. Diller, J. Giltinan, and M. Sitti, “Independent control of multiple magnetic microrobots
in three dimensions,” Int. J. Rob. Res., vol. 32, no. 5, pp. 614–631, 2013.
[45] E. Diller, S. Miyashita, and M. Sitti, “Remotely addressable magnetic composite
micropumps,” RSC Adv., vol. 2, no. 9, pp. 3850–3856, 2012.
[46] J. Rahmer, C. Stehning, and B. Gleich, “Spatially selective remote magnetic actuation of
identical helical micromachines,” Sci. Robot., vol. 2, no. 3, pp. 1–10, 2017.
[47] J. G. Ku, X. Y. Liu, H. H. Chen, R. D. Deng, and Q. X. Yan, “Interaction between two
magnetic dipoles in a uniform magnetic field,” AIP Adv., vol. 6, no. 2, p. 25004, Feb.
2016.
[48] E. Loth, “Drag of non-spherical solid particles of regular and irregular shape,” Powder
Technol., vol. 182, no. 3, pp. 342–353, 2008.
[49] J. Simpson, J. Lane, C. Immer, and R. Youngquist, “Simple Analytic Expressions for the
Magnetic Field of a Circular Current Loop,” Recon, no. February 2001, pp. 1–3, 1829.
[50] H. Markides, M. Rotherham, and A. J. El Haj, “Biocompatibility and toxicity of magnetic
nanoparticles in regenerative medicine,” J. Nanomater., vol. 2012, pp. 13–15, 2012.
[51] W. S. Kamoun et al., “Simultaneous measurement of RBC velocity, flux, hematocrit and

64
shear rate in vascular networks,” Nat. Methods, vol. 7, p. 655, Jun. 2010.
[52] E. B. ROBERT, “CHAPTER 8 - Modeling and Control of Synchronous Reluctance
Machines,” in Control in Power Electronics, M. P. KAZMIERKOWSKI, R. KRISHNAN,
and F. BLAABJERG, Eds. Burlington: Academic Press, 2002, pp. 251–299.
[53] I. Chernysh, C. Nagaswami, P. K Purohit, and J. Weisel, “Fibrin Clots Are Equilibrium
Polymers That Can Be Remodeled Without Proteolytic Digestion,” Sci. Rep., vol. 2, p.
879, Nov. 2012.
[54] A. Mishra, A. Rao, and Y. Pimpalwar, “Ultrasound Guided Percutaneous Injection of
Thrombin: Effective Technique for Treatment of Iatrogenic Femoral Pseudoaneurysms,”
J. Clin. Diagn. Res., vol. 11, no. 4, pp. TC04–TC06, Apr. 2017.
[55] E. Alsberg, E. Feinstein, M. P. Joy, M. Prentiss, and D. E. Ingber, “Magnetically-guided
self-assembly of fibrin matrices with ordered nano-scale structure for tissue engineering,”
Tissue Eng., vol. 12, no. 11, pp. 3247–3256, 2006.
[56] W. H. Mueller, “human blood cells protocol,” 2016. [Online]. Available:
https://www.leica-microsystems.com/science-lab/human-blood-cells-protocol/. [Accessed:
27-Aug-2019].
[57] R. Seghir and S. Arscott, “Extended PDMS stiffness range for flexible systems,” Sensors
Actuators A Phys., vol. 230, pp. 33–39, 2015.
[58] D. Jhala and R. Vasita, “A Review on Extracellular Matrix Mimicking Strategies for an
Artificial Stem Cell Niche,” Polym. Rev., vol. 55, no. 4, pp. 561–595, 2015.
[59] S. A. Gerber et al., “Preferential attachment of peritoneal tumor metastases to omental
immune aggregates and possible role of a unique vascular microenvironment in metastatic
survival and growth,” Am. J. Pathol., vol. 169, no. 5, pp. 1739–1752, Nov. 2006.
[60] I. S. M. Khalil, A. Alfar, A. F. Tabak, A. Klingner, S. Stramigioli, and M. Sitti,
“Positioning of drug carriers using permanent magnet-based robotic system in three-
dimensional space,” IEEE/ASME Int. Conf. Adv. Intell. Mechatronics, AIM, pp. 1117–
1122, 2017.

65
[61] A. W. Mahoney and J. J. Abbott, “Five-degree-of-freedom manipulation of an untethered
magnetic device in fluid using a single permanent magnet with application in stomach
capsule endoscopy,” Int. J. Rob. Res., vol. 35, no. 1–3, pp. 129–147, 2015.
[62] P. Blanco, “Volumetric blood flow measurement using Doppler ultrasound: concerns
about the technique,” J. Ultrasound, vol. 18, no. 2, pp. 201–204, Mar. 2015.
[63] S.-J. Lee and G.-B. Kim, “X-ray particle image velocimetry for measuring quantitative
flow information inside opaque objects,” J. Appl. Phys., vol. 94, no. 5, pp. 3620–3623,
Aug. 2003.
[64] J. K. Patra et al., “Nano based drug delivery systems: recent developments and future
prospects,” J. Nanobiotechnology, vol. 16, no. 1, p. 71, 2018.