Embed Size (px)
Citation preview

1
LỜI CẢM ƠN
Em xin chân thành cảm ơn thầy Nguyễn Năng Tâm đã tận tình giúp
đỡ em trong suốt thời gian em thực hiện đề tài.
Xin chân thành các thầy, các cô trong tổ Hình học - Khoa toán,
Trường Đại học Sư phạm Hà Nội II đã tạo mọi điều kiện giúp đỡ em hoàn
thành đề tài này.
Xin chân thành cảm ơn gia đình và bạn bè đã tạo mọi điều kiện thuận
lợi cho em trong quá trình thực hiện đề tài.
Em xin chân thành cảm ơn.
Xuân Hòa, ngày 05 tháng 05 năm 2013
Sinh viên
Đinh Thị Ly
2
LỜI CAM ĐOAN
Tôi xin cam đoan khóa luận là công trình nghiên cứu của riêng tôi.
Trong khi nghiên cứu, tôi đã thừa kế những thành quả nghiên cứu của
các nhà khoa học, nhà nghiên cứu với sự chân trọng và biết ơn.
Những kết quả nêu trong khóa luận chưa được công bố trên bất kì
công trình nào khác.
Xuân Hòa, ngày 05 tháng 05 năm 2013
Sinh viên
Đinh Thị Ly
3
LỜI NÓI ĐẦU
1. Lý do chọn đề tài
Toán học có vai trò quan trọng trong đời sống thực tiễn, cũng như
trong nghiên cứu khoa học. Toán học là cơ sở nền tảng để nghiên cứu các
môn khoa học khác. Trong quá trình học tập, em được nghiên cứu về
chuyên nghành hình học. Đây là môn học có tính chặt chẽ, tính lôgic, tính
trừu tượng hóa cao độ nên nó là môn học tương đối khó. Với mỗi bài tập
hình học lại có thể có nhiều phương pháp giải khác nhau: phương pháp tọa
độ, phương pháp vectơ, phương pháp tổng hợp....
Việc sử dụng phương pháp tọa độ để giải toán cung cấp cho học sinh
cách nhìn mới, kiến thức mới về toán học hiện đại. Giúp cho các em thấy
được mối quan hệ 1-1 giữa đại số và hình học nhằm phát triển tư duy toàn
diện cho học sinh. Phương pháp tọa độ không chỉ giúp chúng ta giải quyết
các bài toán quỹ tích khó hoặc các bài toán chứng minh mà ta không giải
được bằng suy luận, cứu cánh ta mỗi khi bí, hiệu quả trong khi còn ít thời
gian vì dù tính toán có hơi phức tạp nhưng ta không cần nghĩ nhiều.
Bắt nguồn từ lòng say mê của bản thân và được sự giúp đỡ chỉ bảo
của thầy Nguyễn Năng Tâm em chọn đề tài PHƯƠNG PHÁP TỌA ĐỘ VÀ
ỨNG DỤNG để làm khóa luận tốt nghiệp của mình.

4
2. Mục đích nghiên cứu
Tìm hiểu về phương pháp tọa độ và ứng dụng của phương pháp tọa
độ trong việc giải các bài toán sơ cấp và chứng minh một số định lí trong
hình học xạ ảnh.
3. Nhiệm vụ nghiên cứu
- Nghiên cứu phương pháp tọa độ
- Nghiên cứu một số ứng dụng của phương pháp tọa độ
4. Đối tượng và phạm vi nghiên cứu
- Đối tượng: phương pháp tọa độ và ứng dụng
- Phạm vi nghiên cứu: hình học afin, hình học Ơclit, hình học xạ ảnh
5. Phương pháp nghiên cứu
- Nghiên cứu lý luận, tài liệu tham khảo.
- Phân tích, tổng hợp kiến thức phục vụ cho mục đích nghiên cứu
6. Cấu trúc
Ngoài phần mở đầu, kết luận, tài liệu tham khảo, khóa luận tốt nghiệp
gồm hai chương:
- Chương 1: Phương pháp tọa độ
- Chương 2: Một số ứng dụng giải toán bằng phương pháp tọa độ.

5
MỤC LỤC
LỜI NÓI ĐẦU .............................................................................................. 3
1. Lý do chọn đề tài .................................................................................. 3
2. Mục đích nghiên cứu ............................................................................ 4
3. Nhiệm vụ nghiên cứu ........................................................................... 4
4. Đối tượng và phạm vi nghiên cứu ....................................................... 4
5. Phương pháp nghiên cứu ..................................................................... 4
6. Cấu trúc ................................................................................................. 4
CHƯƠNG 1. PHƯƠNG PHÁP TỌA ĐỘ .................................................. 7
1.1. MỘT VÀI NÉT VỀ HỆ TỌA ĐỘ ................................................... 7
1.2. KHÔNG GIAN AFIN ....................................................................... 8
1.2.2. Mặt phẳng 2A và không gian 3A ................................................. 9
1.3.1. Định nghĩa ..................................................................................... 10
1.3.2. Một số tính chất trong ................................................................. 12
1.3.3 Một số công thức cơ bản trong hệ tọa độ Đêcac vuông góc ..... 13
1.4. KHÔNG GIAN XẠ ẢNH ............................................................... 18
1.4.1. Định nghĩa ................................................................................. 18
CHƯƠNG 2. MỘT SỐ ỨNG DỤNG CỦA PHƯƠNG PHÁP TỌA ĐỘ
VÀO GIẢI TOÁN ...................................................................................... 20
2.1. PHƯƠNG PHÁP TỌA ĐỘ ............................................................ 20
2.2. MỘT SỐ BÀI TOÁN HÌNH HỌC GIẢI BẰNG HỆ TỌA ĐỘ
AFIN ........................................................................................................ 21
2.2.1. Một số toán trong hình học phẳng .......................................... 21
2.2.2. Các bài toán trong không gian .................................................... 25

6
2.3. MỘT SỐ BÀI TOÁN HÌNH HỌC GIẢI BẰNG HỆ TỌA ĐỘ
TRỰC CHUẨN....................................................................................... 31
2.3.1. Trong mặt phẳng ...................................................................... 31
2.3.2. Trong không gian ..................................................................... 39
2.4. ỨNG DỤNG CỦA MỤC TIÊU XẠ ẢNH ................................. 46
KẾT LUẬN ................................................................................................. 53
MỘT SỐ TÀI LIỆU THAM KHẢO ........................................................ 54
7
CHƯƠNG 1. PHƯƠNG PHÁP TỌA ĐỘ
1.1. MỘT VÀI NÉT VỀ HỆ TỌA ĐỘ
Hệ tọa độ là tập hợp các điều kiện để xác định vị trí của một điểm
trên đường thẳng, trên mặt phẳng hay trong không gian.
Khái niệm về hệ tọa độ đầu tiên được đưa vào địa chất và thiên văn
để xác định vị trí trên mặt đất và trên bầu trời. Vào thế kỷ XIV, nhà toán
học người Pháp N.Oresme (1323-1382) sử dụng hệ tọa độ trên mặt phẳng
để dựng đồ thị. Ông dùng khái niệm kinh độ và vĩ độ ứng với khái niệm
tung độ và hoành độ của ta hiện nay.
Vào thế kỷ XVII nhờ các công trình của nhà toán học người Pháp
Descarter, người ta thấy rõ ý nghĩa của phương pháp tọa độ: cho phép
chuyển các bài toán hình học về ngôn ngữ giải tích và ngược lại cho phép
mô tả các kết quả khác nhau toán học giải tích bằng hình học. Ông đã mở ra
một thời kỳ mới cho toán học.
Tọa độ của một điểm là một bộ số được sắp thứ tự, đặc trưng cho vị
trí của một điểm trên đường thẳng, trên mặt phẳng hay trong không gian.
Tọa độ của một điểm luôn gắn liền với một hệ tọa độ xác định, bao
gồm gốc tọa độ và các trục tọa độ. Tùy theo tính chất của việc khảo sát đối
tượng này hay đối tượng khác mà người ta chọn các hệ tọa độ khác nhau.

8
1.2. KHÔNG GIAN AFIN
1.2.1. Định nghĩa
Định nghĩa Cho tập A và không gian vectơ nV trên trường số K .
Giả sử có ánh xạ: : nA A V thỏa mãn hai điều kiện:
i) Với bất kỳ M A và bất kì nv V
đều có duy nhất N A sao cho:
,M N v
ii) Với bất kì M , N , P A đều có: , , ,M N N P M P .
Khi đó, bộ ba , , nA V gọi là một không gian afin liên kết với nV bởi
ánh xạ liên kết .
Kí hiệu: n nA V
, , ,n nA A V , ,MN M N
, nM A M A ,
n nv A v V
.
Định nghĩa Trong không gian afin n chiều nA , trên trường số K cho
điểm O và một cơ sở 1 2, ,...., ne e e
của nA
. Ta gọi bộ số 1 2; , ,...., nO e e e
là một hệ tọa độ afin của nA .
Điểm O được gọi là gốc của hệ tọa độ.
Cơ sở 1 2, ,...., ne e e
gọi là cơ sở của hệ tọa độ.
Định nghĩa Trong không gian afin n chiều nA với hệ tọa độ
1 2; , ,...., nO e e e
cho điểm M bất kỳ. Khi đó có thể biểu thị
1 1 2 2. . .... .n nOM x e x e x e
. Thì bộ số 1 2, ,...., nx x x được gọi là tọa độ
afin của điểm M đối với hệ tọa độ đã cho.
Ký hiệu: 1 2, ,...., nM x x x hay 1 2, ,...., nM x x x .

9
Định nghĩa Trong không gian afin n chiều nA với hệ tọa độ
1 2; , ,...., nO e e e
cho vectơ v
. Khi đó vectơ v
được biểu thị duy nhất dưới
dạng:
1 1 2 2. . ..... .n nv v e v e v e
Bộ số 1 2, ,...., nv v v được gọi là tọa độ afin của vectơ v
đối với
hệ tọa độ đã chọn. Ký hiệu: 1 2, ,..... nv v v v
hay 1 2, ,..... nv v v v
.
Nếu 1 2, ,...., nM x x x và 1 2, ,..., nN y y y thì 1 1,..., n nMN y x y x
.
1.2.2. Mặt phẳng 2A và không gian 3A
Mặt phẳng 2A
Hệ tọa độ afin bao gồm một điểm gốc O và hai vectơ cơ sở 1e
, 2e
.
Trong đó 1e
, 2e
khác vectơ không và không cùng phương.
Không gian 3A
Hệ tọa độ afin gồm một điểm gốc O và ba vectơ cơ sở 1e
, 2e
, 3e
.
Trong đó 1e
, 2e
, 3e
khác vectơ không và không đồng phẳng.
x
y O

10
1.3. KHÔNG GIAN ƠCLIT
1.3.1. Định nghĩa
Định nghĩa Cho không gian vectơ thực V và một ánh xạ :V V mà
ta ký hiệu ,x y
hoặc .x y
. Nếu ánh xạ này thỏa mãn bốn điều kiện sau
thì ta gọi là một hàm tích vô hướng trên V .
i) . .x y y x
ii)
1 2 1 2
1 2 1 2
. . . ;
. . .
x x y x y x y
x y y x y x y
iii) . . . .kx y k x y x ky
iv) . 0x x
và . 0x x
thì 0x
(với mọi x
, 1x
, 2x
, y
, 1y
, 2y
V và mọi k )
Số thực .x y
được gọi là tích vô hướng của hai vectơ x
, y
.
Cặp ,E V
được gọi là một không gian vectơ Ơclit.
Định nghĩa Không gian Ơclit là không gian afin liên kết với không gian
vectơ Ơclit hữu hạn chiều.
x
y
z O

11
Không gian Ơclit sẽ được gọi là n chiều nếu không gian vectơ Ơclit
liên kết với nó có chiều bằng n . Kí hiệu: nE .
Định nghĩa Trong không gian Ơclit n chiều nE 1n . Gọi
1 2, ,..., ne e e
là một cơ sở trực chuẩn của nE , nghĩa là:
( )( )
0.
1i j
i je e
i j
ìï ¹ïï= íï =ïïî
r r
và O là điểm cho trước thì tập hợp ;O hay 1 2; , ,..., nO e e e
được gọi là
hệ tọa độ trực chuẩn hay hệ tọa độ Đêcác vuông góc.
Định nghĩa Trong không gian Ơclit n chiều nE 1n với hệ tọa độ
1 2; , ,..., nO e e e
cho vectơ v
. Khi đó, luôn tồn tại duy nhất bộ số
1 2, ,..., nx x x sao cho:
1 1 2 2. . ... .n nv x e x e x e
Bộ số 1 2, ,..., nx x x gọi là tọa độ của vectơ v
đối với hệ tọa độ đã
cho.
Ký hiệu: 1 2, ,..., nv x x x
hay 1 2, ,..., nv x x x
Định nghĩa Trong không gian Ơclit n chiều nE với hệ tọa độ
1 2; , ,..., nO e e e
cho điểm M bất kỳ. Tọa độ của vetơ OM
được gọi là tọa
độ của điểm M đối với hệ tọa độ đó.
Như vậy, nếu 1 2, ,..., nOM x x x
thì bộ số 1 2, ,..., nx x x được gọi là tọa độ
của điểm M .
Ký hiệu 1 2, ,..., nM x x x hay 1 2, ,..., nM x x x

12
1.3.2. Một số tính chất trong nE
Trong nE cho hệ tọa độ Đêcác vuông góc, cho hai vectơ
1 2( , ,..., )nx x x x
và 1 2, ,..., ny y y y
và số k . Khi đó, ta có:
1 1 2 2, ,..., n nx y x y x y x y
1 2. , ,..., nk x kx kx kx
1 1 2 2. . . ... .n nx y x y x y x y
2 2 2 21 2 ... nx x x x
Khi đó: 2 2 21 2 ... nx x x x
1 1 2 2
2 2 2 2 2 21 2 1 2
. . . ... .cos ,
. ... . ...
n n
n n
x y x y x y x yx y
x y x x x y y y
Cho hai điểm 1 2( , ,..., )nM x x x và 1 2, ,..., nN y y y .Khi đó,
tọa độ của vectơ: 1 1 2 2, ,..., n nMN y x y x y x
.
Đặc biệt, trong 3E ta có:
#) Tích có hướng của 1 1 1, ,u x y z
và 2 2 2, ,v x y z
là w
trong đó :
1 1 1 1 1 1
2 2 2 2 2 2
, , ,y z z x x y
w u vy z z x x y
Vectơ w
này có tính chất:
+) w u
; w v
+) 0 .w u k v
+) Khi .u k v
thì . .sin ,w u v u v
#) Ba vectơ u
, v
, w
đồng phẳng khi và chỉ khi tích hỗn tạp của ba vectơ
bằng không. Tức là: , , , . 0D u v w u v w

13
1.3.3 Một số công thức cơ bản trong hệ tọa độ Đêcac vuông góc
1.3.3.1. Công thức tính khoảng cách
Khoảng cách giữa hai điểm
Trong không gian nE cho hai điểm 1 2, ,..., nM x x x và
1 2, ,..., nN y y y . Khi đó khoảng cách giữa hai điểm M và N là độ dài
vectơ MN
và được tính bởi công thức:
22 2
1 1 2 2 ... n nMN y x y x y x
Khoảng cách từ một điểm đến một siêu phẳng
Trong nE 1n cho một mục tiêu trực chuẩn, một điểm
0 0 00 1 2, ,..., nM x x x và một siêu phẳng có phương trình:
1 1 2 2 0. . ... . 0n na x a x a x a
Khi đó, khoảng cách từ 0 0 00 1 2, ,..., nM x x x đến là:
0 0 0
1 1 2 2 0
0 2 2 21 2
. . ... .,
...
n n
n
a x a x a x ad M
a a a
* Khi 2n , đây là công thức tính khoảng cách từ một điểm đến một đường
thẳng.
* Khi 3n , đây là công thức tính khoảng cách từ một điểm đến một mặt
phẳng.
Khoảng cách giữa hai phẳng
Cho hai cái phẳng và của nE . Giả sử không gian vectơ
có cơ sở 1 2, ,..., nu u u
thì với điểm bất kì A , điểm bất kì B , ta có:

14
1 2
1 2
, ,..., ,,
, ,...,
n
n
Gr u u u ABd
Gr u u u
* Đặc biệt, khi 3n thì và trở thành hai đường thẳng chéo nhau.
Trong không gian, muốn tính khoảng cách giữa hai đường thẳng chéo nhau
ta có những cách sau:
Cách 1:Nếu biết độ dài đoạn vuông góc chung AB giữa hai đường
thẳng chéo nhau a và b thì: ,d a b AB .
Cách 2:
Bước 1: Lập phương trình mặt phẳng chứa đường thẳng a và
b
Bước 2: Lấy một điểm M trên b và tính khoảng cách từ M tới
, ,d a b d M
Cách 3: Ta thực hiện theo các bước:
Bước 1: Tìm vectơ chỉ phương 1u
của đường thẳng a và một điểm
1 1 1 1, ,M a b c
Bước 2: Tìm vectơ chỉ phương 2u
của đường thẳng b và một điểm
2 2 2 2, ,M a b c
Bước 3: Tính khoảng cách giữa hai đường thẳng chéo nhau a và b
theo công thức sau:
1 2 1 2
1 2
, .,
,
u u M Md a b
u u
1.3.3.2. Chia đoạn thẳng theo một tỷ số cho trước

15
Trong nE cho điểm 1 2, ,..., nM x x x chia đoạn thẳng 1 2M M theo tỷ số k
có nghĩa là: 1 2.MM k MM
, khi đó:
1 11
2 22
.
1
.
1
.
1n n
n
y k zx
k
y k zx
k
y k zx
k
Với 1 1 2, ,..., nM y y y và 2 1 2, , , nM z z z .
Đặc biệt, khi 1k thì M là trung điểm của đoạn thẳng
1 2M M và tọa độ điểm M được xách định như sau:
1 11
2 22
2
2
....................
2n n
n
y zx
y zx
y zx
1.3.3.3. Công thức tính góc
Góc giữa hai vectơ
Trong nE cho hai vectơ u
và v
khác vectơ không. Góc giữa hai
vectơ u
và v
là số mà: 0 và .
cos.
u v
u v
.
Góc giữa hai đường thẳng

16
Trong nE , cho hai đường thẳng a và b với vectơ chỉ phương lần
lượt là u
và v
. Góc giữa hai đường thẳng đó là số mà: 02
và
.cos
.
u v
u v
.
Góc giữa hai siêu phẳng
Trong nE , cho hai siêu phẳng và có hai vectơ pháp tuyến lần
lượt là n
và m
. Góc giữa hai siêu phẳng đó là số mà 02
và
.cos
.
m n
m n
.
Góc giữa đường thẳng và siêu phẳng
Trong nE , cho đường thẳng d và siêu phẳng . Vectơ chỉ phương
của đường thẳng d là u
và vectơ pháp tuyến của siêu phẳng là n
. Góc
giữa đường thẳng d và siêu phẳng là số mà : 02
và
.sin
.
u n
u n
.
1.3.3.4. Điều kiện thẳng hàng
Trong nE , điều kiện cần và đủ để ba điểm 1 2, ,..., nA x x x ,
1 2, ,..., nB y y y và 1 2, ,..., nC z z z thẳng hàng là:
1 1 2 2
1 1 2 2
. n n
n n
z x z x z xAC k AB
y x y x y x

17
Đặc biệt, trong không gian cho bốn điểm 1 1 1, ,A x y z , 2 2 2, ,B x y z ,
3 3 3, ,C x y z và 4 4 4, ,D x y z . Điều kiện cần và đủ để bốn điểm đó đồng
phẳng là:
, . 0A B A C A Dé ù
=ê úë û
uuur uuur uuur
1 1 1
2 2 2
3 3 3
4 4 4
1
10
1
1
x y z
x y z
x y z
x y z
1.3.3.5. Công thức tính diện tích tam giác, thể tích tứ diện
Trong mặt phẳng, diện tích tam giác có các đỉnh ( )1 1,A x y , ( )2 2
,B x y ,
( )3 3,C x y được cho bởi công thức sau:
1 1
2 2
3 3
11
. 12
1A BC
x y
S x y
x y
=V
Trong không gian, cho ba điểm ( )1 1 1, ,A x y z , ( )2 2 2
, ,B x y z và
( )3 3 3, ,C x y z không thẳng hàng. Khi đó, diện tích tam giác A BCV được
tính bởi công thức:
1. ,
2A BCS A B A C
é ù= ê ú
ë ûV
uuur uuur
2 2 2
2 1 2 1 2 1 2 1 2 1 2 1
3 1 3 1 3 1 3 1 3 1 3 1
1.
2
y y z z z z x x x x y y
y y z z z z x x x x y y
- - - - - -= + +
- - - - - -

18
Trong không gian, thể tích tứ diện có các đỉnh ( )1 1 1, ,A x y z ,
( )2 2 2, ,B x y z , ( )3 3 3
, ,C x y z , ( )4 4 4, ,D x y z được tính theo công thức:
( )1. . ,
6A BCDV D OA OB OC=
uuur uuur uuur
1 1 1
2 2 2
3 3 3
4 4 4
1
11
16
1
x y z
x y z
x y z
x y z
=
1.4. KHÔNG GIAN XẠ ẢNH
1.4.1. Định nghĩa
Định nghĩa Cho một tập hợp P , một K không gian vectơ 1n + chiều
1nV + và một song ánh 1: np V P+é ù®ê úë û. Khi đó, bộ ba ( )1, , nP p V + được gọi
là không gian xạ ảnh n chiều trên trường K , liên kết với K không gian
vectơ 1nV + sinh bởi song ánh p .
Ta ký hiệu: nP
Định nghĩa Cho không gian xạ ảnh nP liên kết với không gian vectơ
1nV + . Một tập hợp có thứ tự gồm 2n + điểm của nP . { }0 1, , ....., ;
nS S S E
được gọi là mục tiêu xạ ảnh nếu bất kỳ 1n + điểm trong 2n + điểm đó
đều độc lập.
i
S gọi là đỉnh của mục tiêu.
E gọi là điểm đơn vị.

19
_m phẳng ( )m n< đi qua 1m + đỉnh gọi là
_m phẳng tọa độ.
i
S , j
S ( )i j¹ gọi là các trục tọa độ.
Định nghĩa Trong không gian xạ ảnh nP liên kết với 1nV + , cho mục tiêu
xạ ảnh { }0 1, , ....., ;
nS S S E có đại diện là cơ sở { }i
er
của 1nV + . Với mỗi điểm
X bất kỳ của nP ta lấy vectơ xr
đại diện cho X . Khi đó, tọa độ
( )0 1: : ... :
nx x x của đối với cơ sở{ }i
er
cũng là tọa độ của X đối với mục
tiêu { }0 1, , ....., ;
nS S S E .
Viết là: ( )0 1: : ... :
nX x x x=
Trong chương này em đã giới thiệu một số kiến thức cơ bản về hệ tọa
độ. Đây là công cụ để giải các bài toán ở chương 2

20
CHƯƠNG 2. MỘT SỐ ỨNG DỤNG CỦA PHƯƠNG
PHÁP TỌA ĐỘ VÀO GIẢI TOÁN
Ở chương 2 em đưa ra một số ví dụ để minh họa cho ứng dụng của
phương pháp tọa độ.
2.1. PHƯƠNG PHÁP TỌA ĐỘ
Phương pháp tọa độ là phương pháp giải toán bằng cách gắn bài toán
vào một hệ tọa độ thích hợp.
Các bước giải một bài toán bằng phương pháp tọa độ.
Bước 1: Chọn hệ tọa độ thích hợp, sao cho điểm gốc O và các trục
tọa độ trùng với các điểm đặc biệt, các đường đặc biệt thì
việc tính toán sẽ đơn giản ngắn gọn hơn.
Bước 2: Chuyển ngôn ngữ hình học sang ngôn ngữ tọa độ.
Bước 3: Sau đó bằng phương pháp tọa độ và các phép tính đại số
chúng ta thực hiện các yêu cầu của bài toán đặt ra.
Bước 4: Chuyển các ngôn ngữ tọa độ về ngôn ngữ hình học.

21
2.2. MỘT SỐ BÀI TOÁN HÌNH HỌC GIẢI BẰNG HỆ TỌA ĐỘ
AFIN
2.2.1. Một số toán trong hình học phẳng
Bài toán 1: Cho tam giác A BCV .Từ một điểm P thay đổi trong mặt
phẳng kẻ các đường thẳng song song với CA , CB lần lượt cắt CB , CA
tại Q và R . Đường thẳng d nối Q với trung điểm I của CA cắt
đường thẳng 'd nối R với trung điểm J của CB tại S . Chứng minh
rằng đường thẳng PS luôn đi qua điểm cố định.
Lời giải
Hình 1
Chọn hệ tọa độ afin { }; ,C CA CBuur uuur
, ta có: ( )0, 0C , ( )1, 0A , ( )0,1B ,
1, 0
2I
æ ö÷ç ÷ç ÷ç ÷çè ø,
10,
2J
æ ö÷ç ÷ç ÷ç ÷çè ø.
A
B
C
P Q
R I
d
J
'd
S

22
Giả sử ( ),P a b thì ( ), 0R a , ( )0,Q b
Phương trình đường thẳng QI là:
11
2
x y
b+ =
Phương trình đường thẳng R J là:
11
2
x y
a+ =
Phương trình chùm đường thẳng tâm S xác định bởi hai đường thẳng QI
và R J có dạng:
. 2. 1 . 2. 1 0y x
m x n yb a
æ ö æ ö÷ ÷ç ç÷ ÷+ - + + - =ç ç÷ ÷ç ç÷ ÷ç çè ø è ø 2 2( 0)m n+ ¹
Đường thẳng PS thuộc chùm và đi qua điểm ( ),P a b nên tọa độ ( ),a b thỏa
mãn phương trình đường thẳng PS . Do đó ta có: . . 0m a n b+ =
Chọn m b= - thì n a= , ta được phương trình đường thẳng PS là:
( ) ( )2. 1 2. 1 0x y a y b x- + - - - =
Muốn cho đường thẳng này không phụ thuộc vào tọa độ ( ),a b của P ta cần
có:
2. 1 01
2. 1 02
0
y
x x y
x y
ìï - =ïïï - = Û = =íïï - =ïïî
Vậy PS luôn đi qua điểm cố định là trung điểm M của A B .

23
Bài toán 2: Cho hình bình hành A BCD .Trên cạnh DC chọn điểm E sao
cho 1
.DE DCn
=uuur uuur
và trên cạnh BD chọn điểm F sao cho
1.
1DF DB
n=
+
uuur uuur với 0n > . Chứng minh A , F , E thẳng hàng.
Lời giải
Chọn hệ tọa độ afin { }; ,A A B A Duuur uuur
Hình 2
Ta có: (0, 0)A , (1, 0)B , (0,1)D , (1,1)C , 1
, 02
Iæ ö÷ç ÷ç ÷ç ÷çè ø
, 1
0,2
Jæ ö÷ç ÷ç ÷ç ÷çè ø
Từ điều kiện: 1
.DE DCn
=uuur uuur
Þ 1
,1En
æ ö÷ç ÷ç ÷ç ÷çè ø
Từ điều kiện: 1
.1
DF DBn
=+
uuur uuur Þ
1,
1 1
nF
n n
æ ö÷ç ÷ç ÷ç ÷ç + +è ø
Khi đó 1
AF ;1 1
n
n n
æ ö÷ç ÷= ç ÷ç ÷ç + +è ø
uuur và
1( ;1)A En
=uuur
A B
C D
F
E

24
Þ AF .AE1
n
n=
+
uuur uuur
Þ A Euuur
, A Fuuur
là hai vecto cùng phương
Þ A , F , E thẳng hàng.
Bài toán 3: Cho tam giác A BCV .Hai điểm M , N lần lượt lấy trên các
cạnh A B và A C sao cho: .MB h MA=uuur uuur
và .NC k NA=uuur uuur
với 1h k+ = - .
Chứng minh rằng MN luôn đi qua điểm cố định.
Lời giải
Hình 3
Chọn hệ tọa độ afin { }; ,A A B A Cuuur uuur
, ta có ( )0, 0A , ( )1, 0B , ( )0,1C
theo giả thiết ta có:
.MB h MA=uuur uuur
Û . 1
1
A M MB h
A M
-=
uuur uuur
uuur Þ 1
.1
A M A Bh
=-
uuur uuur Þ
1;0
1M
h
æ ö÷ç ÷ç ÷ç ÷ç -è ø
C
B A
N
M

25
Tương tự ta tìm được 1
0;1
Nk
æ ö÷ç ÷ç ÷ç ÷ç -è ø
Đường thẳng MN có phương trình:
11 1
1 1
x y
h k
+ =
- -
Û ( ) ( )1 . 1 . 1 0h x k y- + - - =
Do đó 1h k+ = - nên 1h k= - -
Thay vào phương trình đường thẳng MN ta có:
( )2. . 1 0x y h y x+ + - - = ( )1
Muốn MN đi qua điểm cố định, ta buộc đẳng thức ( )1 không phụ thuộc
vào h . Từ đây ta suy ra:
0
2 1 0
y x
x y
ìï - =ïíï + - =ïî
Û 3 1
x y
y
ìï =ïíï =ïî
Û 1
3x y= =
Vậy điểm cố định mà đường thẳng MN đi qua là 1 1
,3 3
Gæ ö÷ç ÷ç ÷ç ÷çè ø
, đó chính là
trọng tâm tam giác A BCV .
2.2.2. Các bài toán trong không gian
Bài toán 1: Cho ba tia không đồng phẳng Ox , Oy , Oz cùng xuất phát từ
điểm O trong không gian. Trên các tia đó lần lượt lấy các điểm A , B , C
thay đổi sao cho:

26
1 1 1 1
OA OB OC k+ + = ( )_ , 0k const k ¹ .
Chứng minh ( )A BC luôn đi qua điểm cố định.
Lời giải
Chọn hệ tọa độ afin { }1 2 3; , ,O e e er r r
, với các vectơ 1
er
, 2
er
, 3
er
lần lượt nằm trên
các trục Ox , Oy , Oz . Giả sử, ta có: 1
.OA a e=uuur r
, 2
.OB be=uuur r
, 3
.OC c e=uuur r
.
Hình 4
Phương trình mặt phẳng ( )A BC là: 1x y z
a b c+ + =
Theo giả thiết ta có:
1 1 1 1
a b c k+ + = . Do đó: 1
k k k
a b c+ + =
Hay ( ); ;M k k k thỏa mãn phương trình mặt phẳng ( )A BC
y
x
z
O
A
C
B

27
Vậy mặt phẳng ( )A BC luôn đi qua điểm ( ); ;M k k k cố định.
Bài toán 2: Cho tứ diện A BCD . Trên các cạnh A B , A C , A D lần lượt
lấy các điểm K , L , M sao cho: .A B a A K=uuur uuur
, .A C b A L=uuur uuur
,
.A D c A M=uuur uuur
. Chứng minh rằng: nếu 1b a= + , 1c b= + thì mặt phẳng
( )KML luôn đi qua một điểm cố định.
Lời giải
Chọn hệ tọa độ afin { }; , ,A A B A C A Duuur uuur uuur
Phương trình mặt phẳng ( )KML là:
1x y z
A K A L A M+ + =
. . . 1a x b y c zÛ + + =
( ). 2. 1 0a x y z y zÛ + + + + - =
Đây là phương trình chùm mặt phẳng luôn đi qua một đường thẳng cố định
có phương trình là:
0
2. 1 0
x y z
y z
ìï + + =ïíï + - =ïî

28
Hình 5
Bài toán 3: Cho hình tứ diện A BCD . Gọi E , F , G , H , I , K lần lượt là
trung điểm của các cạnh A B , CD , A C , BD , A D , BC và M , N , P , Q
lần lượt là trọng tâm của các tam giác A BCV , A DCV , A BDV , BCDV .
Chứng minh EF , GH , IK , A Q , BN , CP , DM đồng qui.
Lời giải
A
C
B
M
D L
K

29
Hình 6
Chọn hệ tọa độ afin { }; , ,A A B A C A Duuur uuur uuur
Ta có:
(0, 0, 0)A , (1, 0, 0)B , (0,1, 0)C , (0, 0,1)D , 1
( , 0, 0)2
E , 1 1
(0, , )2 2
F , 1
(0, , 0)2
G ,
1 1( , 0, )2 2
H , 1
(0, 0, )2
I1 1
( , , 0)2 2
K
Ta có:
1 1 1, ,
2 2 2EF
æ ö÷ç ÷= -ç ÷ç ÷çè ø
uuur,
1 1 1, ,
2 2 2GH
æ ö- ÷ç ÷= ç ÷ç ÷çè ø
uuur
Phương trình đường thẳng EF là:
1
21 1 1
2 2 2
x y z-= =
-
( )1
A
D B
C
E I
H
F
G
K
M N
P
Q
30
Phương trình đường thẳng GH là:
1
21 1 1
2 2 2
yx z-= =
-
( )2
Gọi O là giao điểm của EF và GH Khi đó, tọa độ của O là nghiệm của hệ
phương trình xác định bởi phương trình ( )1 và phương trình ( )2 .
Giải hệ phương trình này ta tìm được 1 1 1
, ,4 4 4
Oæ ö÷ç ÷ç ÷ç ÷çè ø
.
Đường thẳng IK qua 1
(0, 0, )2
I và nhận 1 1 1
( , , )2 2 2
IK -uur
làm vectơ chỉ
phương, nên có phương trình:
1
21 1 1
2 2 2
zx y -= =
-
( )3
Dễ thấy tọa độ điểm O thỏa mãn phương trình ( )3
Þ Ba đường thẳng EF , GH , IK đồng qui tại O .
Do Q là trọng tâm tam giác BCDV nên ( )1
3A Q A B A D A C= + +uuur uuur uuur uuur
Suy ra: 1 1 1
( , , )3 3 3
Q .
Đường thẳng A Q qua (0, 0, 0)A và nhận A Quuur
làm vectơ chỉ phương nên có
phương trình:

31
1 1 1
3 3 3
x y z= =
Ta thấy tọa độ của O cũng thỏa mãn phương trình đường thẳng A Q
Suy ra bốn đường thẳng EF , GH , IK , A Q đồng qui tại O .
Tương tự ta cũng chứng minh được O thỏa mãn phương trình của các
đường thẳng BN , CP , DM .
Vậy cả bảy đường thẳng EF , GH , IK , A Q , BN , CP , DM đồng qui tại
1 1 1, ,
4 4 4O
æ ö÷ç ÷ç ÷ç ÷çè ø.
Nhận xét: việc sử dụng hệ tọa độ afin vào giải các bài toán sơ cấp giúp cho
việc giải toán đơn giản và dễ dàng hơn.
2.3. MỘT SỐ BÀI TOÁN HÌNH HỌC GIẢI BẰNG HỆ TỌA ĐỘ
TRỰC CHUẨN.
2.3.1. Trong mặt phẳng
Bài toán 1: Cho đường tròn tâm O , bán kính bằng a , có hai đường kính
vuông góc với nhau là A B và CD .Trên tia CD lấy hai điểm M ,N sao
cho CN OM=uuur uuur
. Đường thẳng A B cắt đường tròn tại P . Hãy xét xem khi
N thay đổi trên đoạn OC thì A NPV có vuông tại N không?
Nếu A NPV vuông thì khi đó điểm N nằm ở vị trí nào?
Lời giải

32
Chọn hệ tọa Đêcác vuông góc Oxy sao cho gốc O trùng với tâm O của
đường tròn. Trục Ox OBº , Oy OCº . Đặt CN OM l= = ( )0 l a£ £ .
Hình 7
Ta có tọa độ các điểm ( )0, 0O , ( ), 0A a- , ( )0,C a , ( )0,D a- , ( ), 0B a ,
( )0,M l- , ( )0,N a l- .
Hệ số góc m của đường thẳng A M là:
0
0 ( )N A
N A
y y a l a lm
x x a a
- - - -= = =
- - -
Khi đó, phương trình đường thẳng A M là:
( ).a y lx
l
- +=
Tọa độ giao điểm của đường thẳng A M và đường tròn tâm O là nghiệm
của hệ phương trình:
O
y
C
M
N
P
A
B
D
x

33
( )( )2 2 2
. . . 0 1
2
l x a y a l
x y a
ìï + + =ïïíï + =ïïî
Từ ( )1 ta có: ( ).a y l
xl
- += Thay vào ( )2 ta được:
2
2 2
2. .a ly
a l
-=
+
+Với 0y = Þ x a= - . Suy ra đây là tọa độ điểm A .
+Với 2
2 2
2. .a ly
a l
-=
+ Þ
( )2 2
2 2
.a a lx
a l
-=
+ Þ
( )2 2 2
2 2 2 2
. 2. .,
a a l a lP
a l a l
æ ö- ÷ç - ÷ç ÷ç ÷ç ÷+ +ç ÷çè ø
Khi đó, hệ số góc k của đường thẳng NP là:
( ) ( )( )
2 2 2
2 2
. 2. .
.
N P
N P
a l a l a ly yk
x x a l a
- + +-= =
- -
A NPV vuông tại N khi và chỉ khi:
A N NP^ Û . 1m k = - Û 1
km
-=
Vậy ( ) ( )
( )
2 2 2
2 2
. 2. .
.
a l a l a l aA N NP
a la l a
- + + -^ Û =
--
( ) ( ) ( ) ( )
( )
2 22 2 2
22
. . . . 0
. 00
a l l a l a a a l l a
l aa l l
l
Û - + - + - - =
é =êÛ - = Û ê =êë
Do đó A NPV vuông tại N khi N Cº hoặc khi N Oº . Ngoài hai điểm
đó của N thì A NPV không vuông tại N .
Bài toán 2: Cho A BCV có đường cao CH . Gọi I , K lần lượt là trung
điểm của các đoạn A B và CH . Một đường thẳng d di động luôn luôn song

34
song với cạnh A B cắt A C tại M và cắt cạnh BC tại N . Dựng hình chữ
nhật MNPQ với hai điểm P , Q nằm trên cạnh A B . Gọi J là tâm hình
chữ nhật MNPQ . Chứng tỏ I , K , J thẳng hàng.
Lời giải
Chọn hệ trục tọa độ Đêcác vuông góc Oxy sao cho H Oº . Các
điểm A , B nằm trên trục Ox điểm C nằm trên trục Oy .
Hình 8
Tọa độ của các điểm ( )0, 0H , ( ), 0A a , ( )0,C c , ( ), 0B b .
Vì I là trung điểm của A B nên , 02
a bI
æ ö+ ÷ç ÷ç ÷ç ÷çè ø
Vì K là trung điểm của CH nên 0,2
cK
æ ö÷ç ÷ç ÷ç ÷çè ø
Vì d song song với A B suy ra d song song với Ox nên có phương trình:
y m= (với 0 m c< < ).
x H
N
P B I Q
K
M
C
A
J
y

35
Đường thẳng A C có phương trình:
1x y
a c+ =
. . . 0c x a y a cÛ + - =
Đường thẳng BC có phương trình:
1x y
b c+ =
. . . 0c x b y bcÛ + - =
Do M là giao điểm của A C và đường thẳng d nên tọa độ điểm M thỏa
mãn hệ phương trình sau:
( ).. . . 0
y my m
a c mc x a y a c x
c
ìï =ì ïï = ïï ïÛí í -ï ï+ - = =ï ïî ïïî
Suy ra: ( )
,a c m
M mc
æ ö- ÷ç ÷ç ÷ç ÷ç ÷÷çè ø
Vì N là giao điểm của d và BC tương tự ta cũng có: ( ).
,b c m
N mc
æ ö- ÷ç ÷ç ÷ç ÷ç ÷÷çè ø
Theo giả thiết MNPQ là hình chữ nhật suy ra MQ A B
NP A B
ìï ^ïíï ^ïî
Hay P , Q lần lượt là hình chiếu vuông góc của M , N trên trục Ox

36
( )., 0
a c mP
c
æ ö- ÷ç ÷çÞ ÷ç ÷ç ÷÷çè ø,
( )., 0
b c mQ
c
æ ö- ÷ç ÷ç ÷ç ÷ç ÷÷çè ø
J là trung điểm của PM suy ra ( ) ( ).
,2 2
a b c m mJ
æ ö+ - ÷ç ÷ç ÷ç ÷ç ÷÷çè ø
Ta có: ,2 2
a b cIK
æ ö+ ÷ç ÷= -ç ÷ç ÷çè ø
uur, ,
2 2
a b mIJ m
c
æ ö+ ÷ç ÷= -ç ÷ç ÷çè ø
uur
Ta nhận thấy .c
IK IJm
=uur uur
nên I , K , J thẳng hàng.
Bài toán 3: Cho tam giác A BCV nhọn, đường thẳng ( )d thay đổi. Gọi D ,
E , F lần lượt là hình chiếu vuông góc của A , B , C lên ( )d .
Biết 2 2 2. t an . tan . t an 2.A BC
A D A BE B CF C S+ + =V
Xác định vị trí của đường thẳng ( )d để A D đạt giá trị lớn nhất.
Lời giải
Chọn hệ trục tọa độ Đêcác Oxy sao cho ( )0,A a , ( ), 0B b- , ( ), 0C c ,
( ), 0b c > .
Ta có: t ana
Bb
= , t ana
Cc
= , ( )2
t an tantan
tan . tan 1
a b cB CA
B C a bc
++= =
- -
( )2 .A BC
S OA BC a b c= = +V
Giả sử đường thẳng ( )d có phương trình:
sin cos 0x y da a+ + =

37
Hình 9
Khi đó:
( ),( ) . cosA D d A d a da= = +
( ),( ) sinBE d B d b da= = - +
( ),( ) sinCF d C d c da= = +
Theo giả thiết, ta có:
2 2 2. t an . tan . t an 2. .A BC
A D A BE B CF C S+ + =V
( )( )
( ) ( ) ( )2 2 2
2. cos sin sin
.
a b c a aa d b d c d a b c
b ca bca a a
+Û + + - + + + = +
-
2 22cos 2 cos 0
a dbc ad
bca aÛ + + =
y
F
x
C O
E
B
( )d

38
. cos 0bc
da
aÛ + =
Điều này chứng tỏ, đường thẳng ( )d đi qua điểm 0,bc
Ha
æ ö÷ç ÷ç ÷ç ÷çè ø là trực tâm tam
giác A BCV .
Vậy A D đạt giá trị lớn nhất bằng A H khi đường thẳng ( )d đi qua H và
song song với BC .
Bài toán 4: Chứng minh rằng trong tam giác A BCV với độ dài ba cạnh a ,
b , c ta có:
( ) 2 2 2 2 2 22 a b c a b b c c a+ + £ + + + + +
Lời giải
Nhận xét: giả thiết cho a , b , c là độ dài ba cạnh của một tam giác nên ta áp
dụng hệ thức sau: a b a b- < +
b c c b- < + ( với a , b , c 0> )
c a a c- < +
Từ đó, đặt tọa độ các vecto ứng với độ dài ba cạnh
Cụ thể là: Trong mặt phẳng tọa độ xét:
( ),u a br
, ( ),v b cr
, ( ),w c ar
, ( )1,1tr
Ta có:
. .u t u t£r rr r
hay ( ) 2 22.a b a b+ £ + ( )1
. .v t v t£r rr r
hay ( ) 2 22.c b c b+ £ + ( )2
. .w t w t£r rr r
hay ( ) 2 22.a c a c+ £ + ( )3

39
Từ ( )1 , ( )2 và ( )3 cộng từng vế ta có:
( ) ( )2 2 2 2 2 22 2.a b c a b c b a c+ + £ + + + + +
( ) ( )2 2 2 2 2 22. a b c a b c b a cÞ + + £ + + + + +
Dấu bằng xảy ra khi ur
, vr
, wr
, tr
cộng tuyến
Nghĩa là: ( ) ( ), . 1,1a b k a b= Þ =
( ) ( ), . 1,1b c l c b= Þ =
( ) ( ), . 1,1c a m a c= Þ =
Hay tam giác A BCV là tam giác đều.
2.3.2. Trong không gian
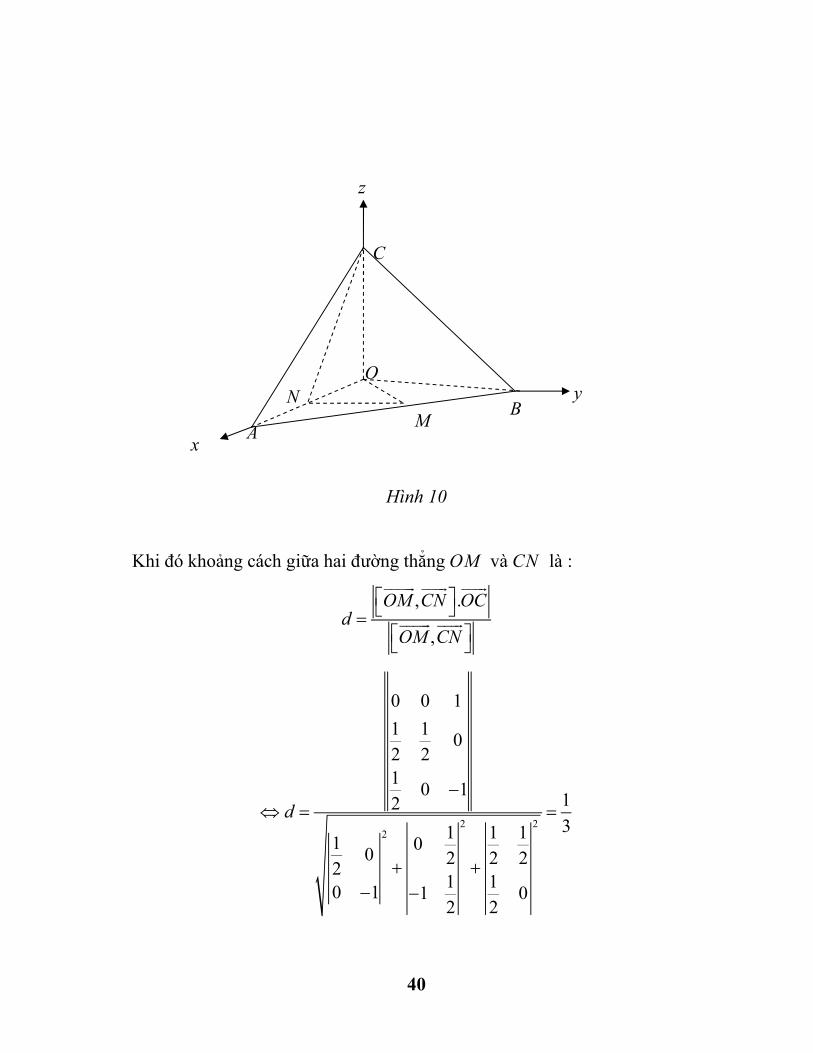
Bài toán 1: Cho tứ diện OA BC có góc tam diện đỉnh là tam diện vuông,
1OA OB OC= = = . Gọi M , N lần lượt là các trung điểm của các cạnh
A B , OA . Tính khoảng cách giữa hai đường thẳng OM , CN .
Lời giải
Chọn hệ trục tọa độ Đêcác vuông góc Oxyz sao cho điểm O của
chóp trùng với gốc tọa độ.
Khi đó: (0, 0, 0)O ; (1, 0, 0)A ; (0, 0,1)C ; 1 1
( , , 0)2 2
M ; 1
( , 0, 0)2
N
Ta có véctơ chỉ phương của đường thẳng OM là 1 1
( , , 0)2 2
OMuuur
Ta có véctơ chỉ phương của đường thẳng CN là 1
( , 0, 1)2
CN -uuur
40
Hình 10
Khi đó khoảng cách giữa hai đường thẳng OM và CN là :
, .
,
OM CN OCd
OM CN
2 22
0 0 1
1 10
2 2
10 1
1231 1 1
1 00 2 2 2
21 1
0 1 1 02 2
d
y
x
O
C
B
A M
N
z

41
Bài toán 2: Cho hình chóp .S A BCD có SA ABCD tại A , có đáy
A BCD là nửa lục giác đều nội tiếp đường tròn đường kính 2AB a ,
3SA a và vuông góc với đáy.
a, Tính góc giữa hai mặt phẳng ( )SAD và ( )SBC
b, Tính khoảng cách từ điểm A đến mặt phẳng ( )SBC
Lời giải
Vì giả thiết cho SA ABCD tại A . Do đó, ta có thể chọn hệ trục toạ độ
Đêcác vuông góc Oxyz sao cho A O . Giả sử điểm B Ox , S Oz .
Khi đó: (0,0,0)A , (2 ,0,0)B a . Do A BCD là nửa lục giác đều nên suy ra
3 3( , ,0)
2 2
a aC ,
3( , ,0)2 2
a aD , (0,0, 3)S a
Hình 11
a) Gọi 1 1 1 1( , , )n x y z
,
2 2 2 2( , , )n x y z
theo thứ tự là vectơ tuyến của các mặt
phẳng ( )SAD , ( )SBC .
x
z
y D
C
S
A B

42
1
1
n SA
n SD
Với (0,0, 3)SA a
, 3
( , , 3)2 2
a aSD a
1( 3, 1,0)n
2
2
n SB
n SC
Với (2 ,0, 3)SB a a
, 3 3
( , , 3)2 2
a aSC a
2( 3,1,2)n
Khi đó, gọi là góc tạo bởi hai mặt phẳng ( )SAD và ( )SBC
1 2
1 2
. 3 1 0 2 1cos
. . 3 1. 3 1 4 4 2 2 2
n n
n n
b) Mặt phẳng ( )SBC qua 2 ,0,0B a và có vectơ pháp tuyến 2( 3,1,2)n
.
Do đó phương trình mặt phẳng ( )SBC có dạng:
3. 2 1. 0 2. 0 0x a y z
3. 2. 2 . 3 0x y z a
Khi đó khoảng cách từ điểm A đến mặt phẳng ( )SBC được xác định như
sau:
3.0 0 0.2 2 . 3 3
, .23 1 4
ad A SBC a
Bài toán 3: Cho hình lập phương 1 1 1 1
.ABCD A B C D . Gọi G là trọng tâm của
tam giác 1
BDA . Chứng minh rằng A , G , 1
C thẳng hàng.
Lời giải
Chọn hệ tọa độ Đêcác vuông góc Oxyz sao cho A O . Các điểm B , D ,
1A lần lượt thuộc các trục Ox , Oy , Oz .

43
Hình 12
Ta giả sử: A B a= , A D b= , 1
AA c=
Khi đó, ta có: (0,0,0)A , ( ,0,0)B a , (0, ,0)D b , 1(0,0, )A c ,
1( , , )C a b c
Theo giả thiết G là trọng tâm tam giác 1
A BD .
Do đó: 1
3AG AB AD AA
Ta có: ( ,0,0)AB a
, (0, ,0)AD b
, 1(0,0, )AA c
Suy ra:
13 ,0,0 0, ,0 0,0,AG AB AD AA a b c
Suy ra: 1
, ,3
AG a b c
Mặt khác, 1, ,AC a b c
suy ra
1
1.
3AG AC
Vậy A , G , 1
C thẳng hàng.
z
C
A
x
y
1C
1B
1D
D B
1A
G
44
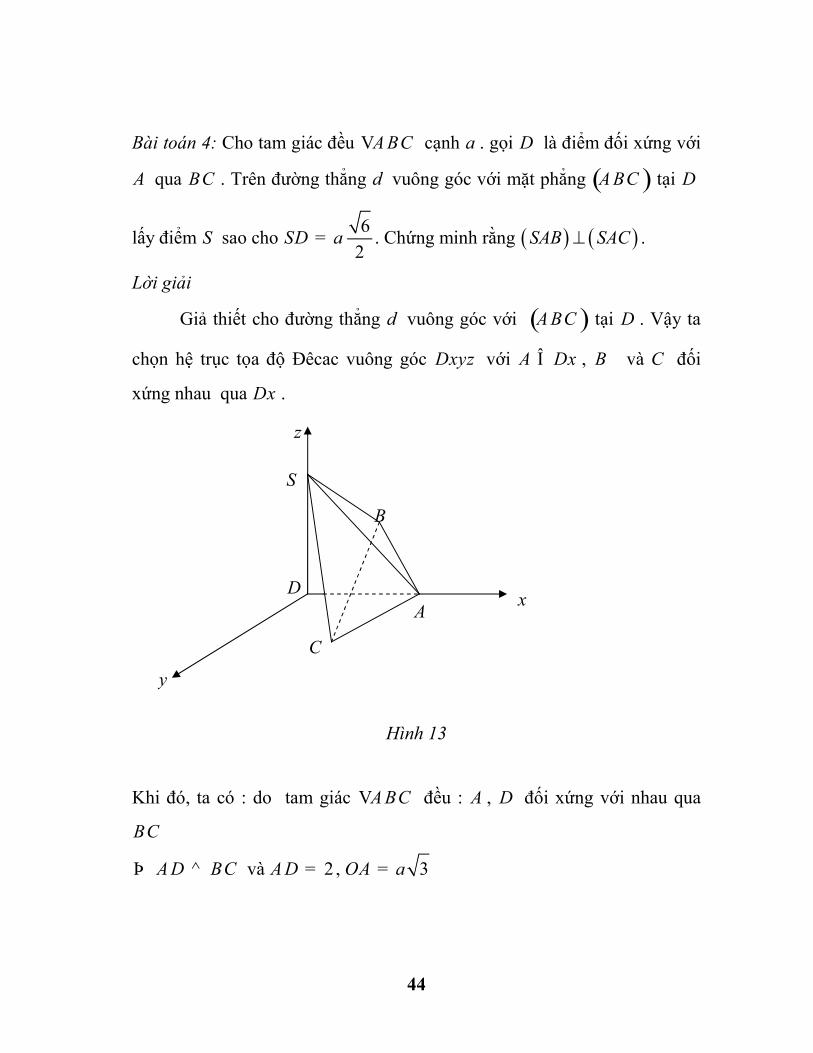
Bài toán 4: Cho tam giác đều A BCV cạnh a . gọi D là điểm đối xứng với
A qua BC . Trên đường thẳng d vuông góc với mặt phẳng ( )A BC tại D
lấy điểm S sao cho 6
2SD a= . Chứng minh rằng SAB SAC .
Lời giải
Giả thiết cho đường thẳng d vuông góc với ( )A BC tại D . Vậy ta
chọn hệ trục tọa độ Đêcac vuông góc Dxyz với A DxÎ , B và C đối
xứng nhau qua Dx .
Hình 13
Khi đó, ta có : do tam giác A BCV đều : A , D đối xứng với nhau qua
BC
A D BCÞ ^ và 2A D = , 3OA a=
x D
y
z
B
A
C
S

45
(0, 0, 0)DÞ , ( 3, 0, 0)A a , 3
( , , 0)2 2
aB a
-,
3( , , 0)
2 2
a aC ,
6(0, 0, )
2
aS
Gọi 1
nur
, 2
nr
lần lượt là vecto pháp tuyến của ( )SA B và ( )SA C
Ta có: ( )
1
2
( )n SA B
n SA C
ìï ^ïïíï ^ïïî
ur
ur Þ 1
2
n SA
n SA
ìï ^ïïíï ^ïïî
ur uur
ur uur và 1
2
n A B
n A C
ìï ^ïïíï ^ïïî
ur uuur
ur uuur
Þ
1
2
63, 0,
2
3, , 0
2 2
an SA a
a an A C
ì æ öï - ÷ï ç ÷ï ç^ ÷çï ÷çï ÷çè øïí æ öï - ÷çï ÷çï ^ ÷çï ÷çï ÷çè øïî
ur uur
ur uuur Þ ( )2
1, 3, 2n -ur
Ta thấy: 1 2. 1.1 3. 3 2. 2 0n n = - + =
ur uur
( ) ( )SA B SA CÞ ^
Như vậy, việc sử dụng phương pháp tọa độ vào giải toán làm cho lời
giải của bài toán đơn giản, dễ hiểu hơn. Giúp ta giải quyết những bài toán
mà bằng phương pháp suy luận rất khó có thể tìm ra lời giải.
46
2.4. ỨNG DỤNG CỦA MỤC TIÊU XẠ ẢNH
Mục tiêu xạ ảnh không được biết đến rộng rãi để giải các bài toán sơ cấp
như hệ tọa độ afin hay hệ tọa độ Đêcac vuông góc nhưng đây lại là công cụ
rất hữu hiệu trong việc chứng minh một số định lý toán học.Chẳng hạn như:
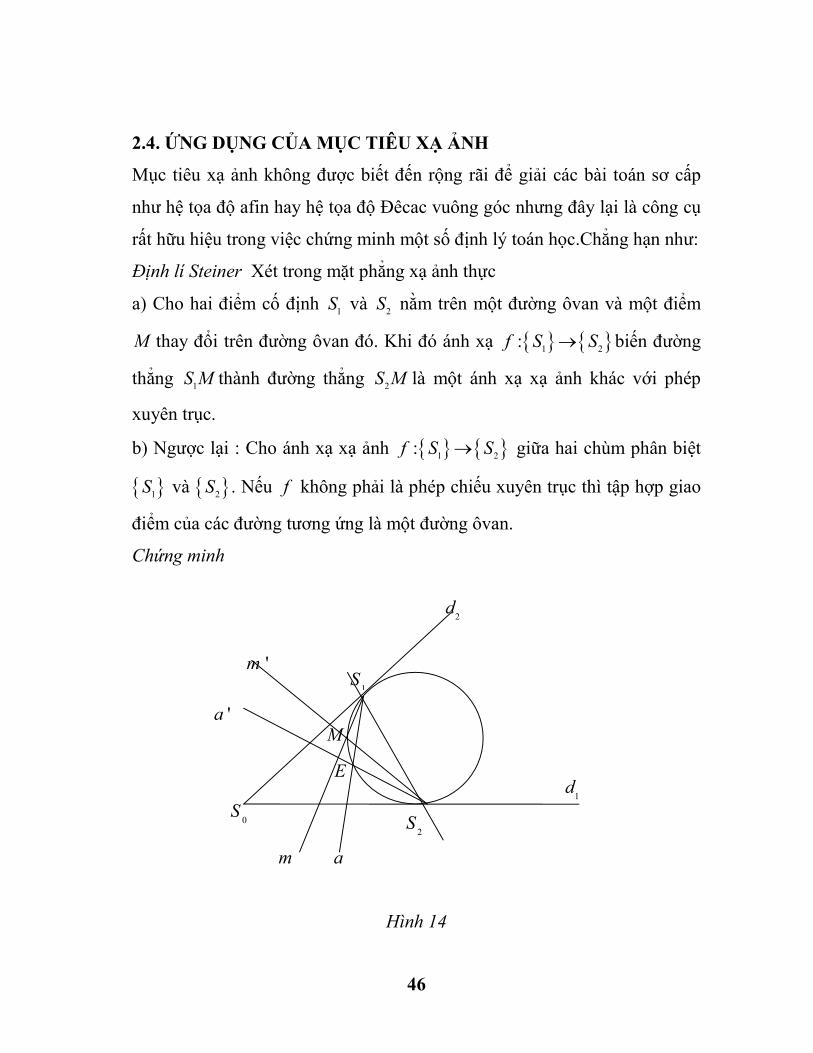
Định lí Steiner Xét trong mặt phẳng xạ ảnh thực
a) Cho hai điểm cố định 1
S và 2
S nằm trên một đường ôvan và một điểm
M thay đổi trên đường ôvan đó. Khi đó ánh xạ 1 2:f S S biến đường
thẳng 1
S M thành đường thẳng 2
S M là một ánh xạ xạ ảnh khác với phép
xuyên trục.
b) Ngược lại : Cho ánh xạ xạ ảnh 1 2:f S S giữa hai chùm phân biệt
1S và 2S . Nếu f không phải là phép chiếu xuyên trục thì tập hợp giao
điểm của các đường tương ứng là một đường ôvan.
Chứng minh
Hình 14
2d
0S
1d
2S
1S
'm
M
m
'a
a
d0
E

47
a) Gọi 0
d là đường thẳng đi qua 1
S và 2
S ; 1
d và 2
d lần lượt là tiếp tuyến
của ôvan tại 2
S và 1
S , 0 1 2
S d d . Lấy một điểm E cố định trên ôvan và
khác với 1
S và 2
S . Nếu chọn 0 1 2, , ;S S S E làm mục tiêu xạ ảnh thì phương
trình của ôvan là: 2
0 1 2. 0x x x .
Nếu điểm M nằm trên ôvan, khác với 1
S và 2
S thì tọa độ 0 1 2: :x x x của
nó thỏa mãn phương trình đó và 0
0x . Do đó 1
0x . Bởi vậy: 2 0
0 1
x x
x x
Nên gọi 1
a S E , 2
'a S E , 1
m S M , 2
'm S M thì dễ dàng thấy
rằng: 2
0 2
0
, , ,x
d d a mx
, 0
1 0
1
, , ', 'x
d d a mx
.
Suy ra: 0 2 1 0, , , , , ', 'd d a m d d a m . Do đó f là ánh xạ xạ ảnh và vì
0d
không tự ứng nên f không phải là phép chiếu xuyên trục.
b. Gọi 0
d là đường thẳng đi qua 1
S và 2
S , 0 1
( )f d d , 1
0 2( )f d d . Vì f
không phải là phép chiếu xuyên trục nên 0
d không tự ứng, do đó 0
d , 1
d , 2
d
đôi một phân biệt. Vì vậy ba điểm 0 1 2
S d d , 1
S , 2
S là ba điểm độc lập.
Gọi a là đường thẳng của chùm 1S khác với 0
d và 2
d , 'a a , và
'E a a . Ta chọn 0 1 2, , ;S S S E làm mục tiêu xạ ảnh. Với mỗi đường
thẳng 1m S và 2'm f m S , ta đặt 0 1 2
' : :m m X x x x . Khi
đó: 0
(1: 0 : 0)d , 1
(0 :1: 0)d , 2
(0 : 0 :1)d , (1: 0 : 1)a , ' ( 1:1: 0)a ,
2 0( : 0 : )m x x ,
1 0' ( : : 0)m x x .
Từ đó suy ra: 2
0 2
0
, , ,x
d d a mx
và 0
1 0
1
, , ', 'x
d d a mx

48
Hình 15
Nhưng vì f là ánh xạ xạ ảnh nên: 0 2 1 0, , , , , ', 'd d a m d d a m
Vậy 2 0
0 1
x x
x x hay 2
0 1 2. 0x x x
Đó là phương trình của đường ôvan tiếp xúc với 1
d và 2
d lần lượt tại 1
S và
2S .
Định lí Pappus Trong 2 cho ba điểm phân biệt A , B , C thuộc đường
thẳng d và ba điểm phân biệt 'A , 'B , 'C thuộc đường thẳng 'd . Giả sử
'd d và 0
'd d S không trùng với sáu điểm đã cho. Khi đó ba điểm
' 'BC B C , ' 'AC A C , ' 'BA B A thẳng hàng.
Chứng minh
1S
0S
a
m
1d
0d
2S
2d E
'a
'm

49
Chọn mục tiêu xạ ảnh 0 1 2, , ;S S S E , trong đó
1S d ,
2'S d với
1S
không trùng với ba điểm A , B , C còn 2
S không trùng với ba điểm . 'A ,
'B , 'C , E là điểm tùy ý.
Khi đó ta có:
( :1:0)A a , ( :1:0)B b , ( :1:0)C c , '( ' : 0 :1)A a , '( ' : 0 :1)B b , '( ' : 0 :1)C c
Hình 16
Từ đó ta tính được: ' ' ( ' ' : ' ' : )BC B C bb cc b c b c
' ' ( ' ' : ' ' : )AC A C cc aa c a c a
' ' ( ' ' : ' ' : )AB A B aa bb a b a b
Cộng ba dòng tọa độ của a , b , g lại ta được 0 :0 : 0 nên
' ' ' '
' ' ' ' 0
' ' ' '
bb cc b c b c
cc aa c a c a
aa bb a b a b
Do đó a , b , g thẳng hàng.
A
'd
d
0S
C B
'A 'B
'C

50
Định lí Staud Trong 2P cho một đường bậc hai không suy biến ( )G , nếu
hai cặp đỉnh đối diện của một hình bốn cạnh toàn phần liên hợp với nhau
đối với ( )G thì cặp đỉnh đối diện còn lại cũng liên hợp với nhau đối với
( )G
Chứng minh
Giả sử , 'A A , , 'B B , , 'C C là ba cặp đỉnh đối diện của hình bốn
cạnh toàn phần nào đó mà A liên hợp với 'A còn B liên hợp với 'B đối
với ( )G .
Chọn mục tiêu xạ ảnh , ', ; 'A A B B và giả sử ( )G có phương trình:
2 2 2
00 0 11 1 22 2 01 1 2 02 0 2 12 1 22 2 2 0a x a x a x a x x a x x a x x
Ta có (1:0 :0)A , '(0 :1:0)A , (0 :0 :1)B , '(1:1:1)B . Từ đó ta tính được
(1: 0 :1)C và '(0 :1:1)C .
Đặt
0 1 2 0 1 2 00 0 0 11 1 1 22 2 2 01 0 1 1 0, , , , ,F x x x y y y a x y a x y a x y a x y x y
02 0 2 2 0 12 1 2 2 1a x y x y a x y x y
Vì A liên hợp với 'A nên (1,0,0,0,1,0) 0F do đó 01
0a
Vì B liên hợp với 'B nên (0,0,0,0,1,1) 0F do đó 22 02 12
0a a a
Với hai điểm C và 'C ta có 22 02 12
(1,0,1,0,1,1) 0F a a a , tức là C liên
hợp với 'C .
Định lí về hình bốn đỉnh toàn phần Trong hình bốn đỉnh toàn phần, hai
điểm chéo nhau nằm trên một đường chéo chia điều hòa cặp giao điểm của
đường chéo đó với cặp cạnh đi qua điểm chéo thứ ba.

51
Chứng minh
Giả sử A BCD là hình bốn đỉnh toàn phần. Ba điểm chéo của nó là:
P AB CD , Q AD BC và R AC BD .
Gọi M AD PR , N BC PR . Ta phải chứng minh: , , , 1P R M N .
Trong mặt phẳng 2P chứa hình bốn đỉnh ta chọn mục tiêu xạ ảnh
0 1 2, , ;S S S E , sao cho:
0(1: 0 : 0)S A ,
1(0 :1: 0)S B , (1:1:1)E D
Hình 17
Đường thẳng A B có phương trình 2
0x , nên điểm P có tọa độ là
0 1( : : 0)x x .
Mặt khác, ba điểm P , D , C thẳng hàng nên:
0 10
1 1 1 0
0 0 1
x x
hay 0 1
x x suy ra 1:1:0P
Tương tự ta tính được: 1:0 :1R
A
Q
P
D
B
C
R
M
N

52
Phương trình đường thẳng PR là:
0 1 2
1 1 0 0
1 0 1
x x x
hay 0 1 2
0x x x
Còn đường thẳng BC có phương trình: 0
0x
Suy ra tọa độ điểm là: 0 :1: 1N
Phương trình đường thẳng A D là:
0 1 2
1 0 0 0
1 1 1
x x x
hay 2 1
0x x
Tọa độ điểm 2 :1:1M AD PR .
Từ đó ta có: M P R và N P R hay , , , 1P R M N
Như vậy, bằng việc sử dụng mục tiêu xạ ảnh các nhà toán học đã chứng
minh được các định lí toán học đây là công cụ hữu ích trong việc nghiên
cứu không gian xạ ảnh.

53
KẾT LUẬN
Khái niệm hệ tọa độ ra đời cho ta một phương pháp mới để giải toán
một cách hiệu quả hơn. Nhờ có phương pháp này mà các bài toán chứng
minh vuông góc, thẳng hàng, tìm quỹ tích...được giả quyết ngắn gọn dễ
dàng hơn. Không những thế đây còn là một phương pháp rất hữu ích trong
việc chúng minh các định lí toán học.
Không có phương pháp nào là chìa khóa vạn năng trong việc giải tất
cả các bài toán, một bài toán có thể có nhiều cách giải. Có thể lời giải em
đưa ra chưa thực sự tối ưu và còn rất nhiều định lí khác trong không gian xạ
ảnh được chứng minh nhờ phương pháp tọa độ song các bài toán hay các
định lí em đưa ra trong bài khóa luận là để minh họa cho ứng dụng của
phương pháp này.
Mặc dù, đã có nhiều cố gắng song đây là lần đầu tiên em làm quen
với việc nghiên cứu khoa học nên không thể tránh được những thiếu sót.
Em mong muốn các thầy cô, các bạn sinh viên đóng góp ý kiến trao đổi để
luận văn hoàn thiện tốt hơn.
Ngày 05 tháng 05 năm 2103
Sinh viên
Đinh Thị Ly

54
MỘT SỐ TÀI LIỆU THAM KHẢO
1. Phạm Khắc Ban- Phạm Bình Đô, Hình học afin và hình học Ơclit
trên những ví dụ và bài tập, NXB ĐHSP.
2. Văn Như Cương- Tạ Mân, Hình học afin và hình học Ơclit, NXB
Đại học quốc gia Hà Nội 1998.
3. Văn Như Cương, Hình học xạ ảnh, NXBGD 1999.
4. Phạm Bình Đô, Bài tập hình học xạ ảnh, NXBĐHSP.
5. Từ điển Toán học, Hoàng Hữu Như, Lê Đình Thịnh dịch, NXBKH
và KT 1993.
6. Http: Ebook.ringring.vn





























