Embed Size (px)
Citation preview

Literature Review of State of the Art Numerical and Analytical Approaches to Problems in
Spine Mechanics
MAE 586: Project Work in Mechanical Engineering
Modeling of the Human Spine
North Carolina State University
Raleigh, North Carolina
May 2016
Prepared by:
Christine Reubi
Advisor:
Dr. Andre Mazzoleni

i
Table of Contents
1. Introduction ........................................................................................................................... 1
2. Background ............................................................................................................................ 1
2.1 Biological Structures ...................................................................................................... 2
2.1.1 Vertebrae ................................................................................................................. 2
2.1.2 Intervertebral Discs ................................................................................................ 5
2.1.3 Ligaments................................................................................................................. 6
2.2 Interbody Devices ........................................................................................................... 8
3. State of the Art Numerical and Analytical Approaches .................................................... 9
3.1 Disc Mechanics ............................................................................................................... 9
3.1.1 Analytical Model of Intervertebral Disc Mechanics .......................................... 10
3.1.2 Viscoelastic Numerical Model of Intervertebral Disc Mechanics .................... 14
3.2 Ligament Models ......................................................................................................... 21
3.3 Multiscale Optimization .............................................................................................. 22
3.4 Artificial Neural Networks .......................................................................................... 25
4. Discussion ............................................................................................................................. 27
4.1 Model Limitations ........................................................................................................ 28
4.1.1 Disc Model Limitations......................................................................................... 28
4.1.2 Multiscale Optimization Limitations .................................................................. 29
4.2 Future Analysis Opportunities .................................................................................... 30
4.2.1 Disc Analysis .......................................................................................................... 30
4.2.2 Interbody Device Design....................................................................................... 31
4.3 Summary ....................................................................................................................... 31
References .................................................................................................................................... 33

ii
List of Figures
Figure 1: Vertebral Body (A) Side View and (B) Top View ..................................................... 3
Figure 2: Internal Trabeculae Structure of the Vertebral Body .............................................. 3
Figure 3: Left Lateral View of the Vertebral Body with Posterior Elements ......................... 4
Figure 4: Simplified Model of the Lumbar Spine ...................................................................... 4
Figure 5: Structure of an Intervertebral Disc ............................................................................ 5
Figure 6: Compressive Stress Applied to an Intervertebral Disc ............................................. 6
Figure 7: Section of the Lumbar Spine Including Ligaments................................................... 7
Figure 8: Schematic Diagram of the Intervertebral Disc ........................................................ 10
Figure 9: Diagram of the Fiber Angle and Membrane Stress Resultants ............................. 11
Figure 10: Diagram of the Equilibrium State of the Membrane ............................................ 12
Figure 11: Spring and Dashpot Diagram of the Zener Model ................................................ 15
Figure 12: Network Diagram of the Viscoelastic Model ......................................................... 16
Figure 13: Influence of Parameter τ for c1e = 0 and ɳ = 1 ....................................................... 17
Figure 14: Influence of Parameter τe for c1 = 0 and ɳ = 1 ....................................................... 18
Figure 15: Influence of Parameter ɳ for c1 and c1e = 1 ............................................................ 18
Figure 16: Pressure Distribution within the Intervertebral Disc ........................................... 20
Figure 17: von Mises Stress Distribution within the Intervertebral Disc .............................. 20
Figure 18: AF NP Relative Contributions to the Intervertebral Disc Resultant Force........ 21
Figure 19: Geometrical Model (C2-T1) .................................................................................... 22
Figure 20: Finite Element Model (C2-T1) ................................................................................ 23
Figure 21: Design Process for ALIF Cage Design.................................................................... 25
Figure 22: Artificial Neural Network Process Diagram .......................................................... 27
List of Tables
Table 1: Boundary and Load Conditions for Analytical Disc Model .................................... 12
Table 2: Intervertebral Disc Dimensions for 2-D Axisymmetric COMSOL Model ............. 19
Table 3: Material Constants for COMSOL Simulation .......................................................... 20
Table 4: COMSOL Simulation Parameters for the Nucleus Pulposus .................................. 21
Table 5: FEA Input Parameters ................................................................................................ 26
Table 6: Final Result of ANN Analysis ..................................................................................... 27

Page 1 of 34
1. Introduction
In order to inform future analytical and numerical studies for problems in spine
mechanics, this literature review presents a collection of state of the art analyses and
discusses the limitations of each. This investigation describes analyses of
intervertebral disc mechanics and of interbody fusion device design. These analyses
involve simplifying assumptions and generally utilize data from healthy spines as
validation for the results. Future analyses look to improve researchers’ and
physicians’ understanding of the behavior of diseased or damaged human spinal
structures.
The effects of scoliosis and the efficacy of fusion as a treatment are of particular
interest to the study of spine mechanics and to interbody fusion device research and
development. Scoliosis involves a structural deformation of the spine that may occur
in any region of the vertebral column, though more prevalent in the thoracic and
lumbar regions. This spinal deformation indicative of this disease affects the
surrounding tissues and, critically, the intervertebral discs. The deformation alters
stress distributions within the disc; however, the current state of the art in disc
mechanics has thus far focused on the simplifying assumptions of a uniform load
applied to an axisymmetric disc structure. Further study and experimentation of the
disc response may provide additional insight into why and how intervertebral discs
degenerate and fail in scoliotic patients so that treatment may be developed.
Diseases such as scoliosis and spondylolisthesis may require interbody fusion as a
treatment to prevent further progression of the disease by limiting movement of the
spinal column. Interbody fusion cages use bone grafts to fuse adjacent vertebrae and
are frequently applied to the lumbar region of the spine with the goal of reducing pain
in the patient’s back. This review includes two state of the art design methods for
developing highly effective interbody fusion cages. The studies summarized herein
introduce a multiscale optimization technique to optimize the effectiveness of
vertebral fusion and to employ an artificial neural network analysis to reduce the
occurrence of fusion failure.
2. Background
To fully understand the anatomy required to study problems in spine mechanics,
some background is provided on the biological structures within the spine. The
different sections of vertebral columns within the spine (cervical, thoracic, and
lumbar) through the sacrum are described in the sections that follow, as well as the
associated intervertebral discs and ligaments. Following the biological background of
the spine, a brief overview of interbody fusion devices is given. Design of these
devices and analysis of their effects on the surrounding structure are perhaps the most
crucial applications dealing with biomechanics of the spine.

Page 2 of 34
2.1 Biological Structures
The cervical spine resides at the top of the spinal column. This section features
small vertebral bodies, and cervical disc height is thick compared to the scale of
the cervical vertebrae. These large discs allow the cervical spine greater mobility,
which can be experienced by extending, flexing, or rotating the head. From top
to bottom, the cervical vertebrae are numbered C1-C7. Intervertebral discs are
named by the vertebrae they reside between. The cervical spine contains the C1-
C2, C2-C3, C3-C4, C4-C5, C6-C7, and C7-T1 discs [1]. The analyses discussed
here will not generally deal with analysis of the cervical spine but with that of
the lumbar spine.
Below the cervical spine, sits the thoracic spine, which includes the thoracic
vertebrae and discs, the ribs, and the sternum. This section transfers compressive
loads to the lumbar spine below [1]. Thoracic vertebrae number from T1 to T12,
and the corresponding discs are named as T1-T2 through T12-L1.
Most of the analysis review and discussion will focus on the lumbar spine. The
lumbar column contains five vertebral elements, L1-L5. The associated lumbar
discs are named L1-L2 through L4-L5. An additional intervertebral disc, the
lumbosacral disc, separates the L5 from the sacrum, L5-S1. Some analyses also
include the sacrum, which supports the lumbar column. This bone transmits
loads from the spine to the lower limbs [1].
The spine allows movement between the skull and the pelvis through four basic
motions: flexion, extension, lateral bending, and axial rotation. Flexion occurs
when the torso curves forward into a bend. Extension bends the spine back from
a standing posture into an arch, which is opposite from flexion. Lateral bends
bend the spine from side to side (i.e., left or right). Finally, axial rotation is a
twist around the plane of the spinal column. These movements indicate the types
of loads that are applied in detailed analysis.
2.1.1 Vertebrae
The vertebral components of the human spine sustain compressive loads
that are transmitted from the trunk onto the spine. To support these
compressive loads, each vertebrae contains two types of bone: cortical and
trabecular. The cortical bone serves as the outer shell of the roughly
cylindrical vertebral body (Figure 1). Overlapping vertical and horizontal
trabeculae reinforce the structure of the vertebral body by adding support
to carry compressive loads and to prevent buckling. The reinforcing effect
of the trabeculae is demonstrated in Figure 2 and described in greater
detail in The Biomechanics of Back Pain [1].

Page 3 of 34
Figure 1: Vertebral Body (A) Side View and (B) Top View [1]
Figure 2: Internal Trabeculae Structure of the Vertebral Body [1]
Without posterior elements, the vertebral bodies would slide front to back
or side to side along the spinal column. Posterior elements (Figure 3)
constrain the movement of each vertebrae. These additional bone
structures also provide attachment sites for muscles along the spinal
column. These muscles apply loads to bend or twist the spine indirectly by
leveraging the posterior elements [1].

Page 4 of 34
Figure 3: Left Lateral View of the Vertebral Body with Posterior Elements (VB =
Vertebral Body, P = Pedicle, TP = Transverse Process, iaf = Inferior Articular Facet,
SP = Spinous Process) [1]
Understanding the vertebrae and their structure sets the stage for the
analysis environments discussed in this review. Vertebrae are often key
modeling components in finite element and other numerical analyses.
Typically, actual patient computed tomography (CT) scans form the basis
of these models and provide incredible detail. More simplified models
(Figure 4), such as proposed by Xiaoyang Wang, save computing time
while still providing insightful results [2].
Figure 4: Simplified Model of the Lumbar Spine [2]

Page 5 of 34
2.1.2 Intervertebral Discs
Between each consecutive vertebra in the spine, an intervertebral disc
evenly transmits the compressive load while enabling bending movement
in the torso. The summation of all intervertebral discs contributes about
25% of the total spine length [1]. These discs have a structure consisting
of three components – a central gel known as the nucleus pulposus (NP),
sheets of tightly packed lamellae that comprise the annulus fibrosus (AF),
and vertebral end plates (VEP) that sandwich the disc on top and bottom
Figure 5). All three components are essential for stable, supportive discs.
The nucleus pulposus is
a gel-like material
located at the center of
each intervertebral disc
that expands under
compressive loading.
This gel consists of
proteoglycans,
composed of complex
sugars and protein.
These proteoglycans
retain water essential for
healthy disc function.
Within the center of the
disc, the nucleus
pulposus acts as a fluid
with a hydrostatic
pressure; however,
under rapid loading, it
behaves as a viscoelastic
solid [1]. For the
purposes of disc
modeling, it is critical to
understand these fluid
mechanical properties
and behavior of the
nucleus pulposus.
The nucleus pulposus prevents the annulus fibrosus from buckling under
compression by expanding and generating hoop stress within the wall of
the annulus fibrosus (Figure 6). 10-20 sheets of collagen lamellae form
this wall to sustain the compressive loads of the spine. In each sheet,
Figure 5: Structure of an Intervertebral Disc (VEP =
Vertebral End Plate, NP = Nucleus Pulposus, AF =
Annulus Fibrosus) [1]

Page 6 of 34
collagen fibers are oriented at an angle of approximately 65o. The sheets
are successively ordered in opposing orientations to maintain the integrity
of the disc wall. Fibers in the annulus fibrosus curve from endplate to
endplate, which may cause more complex geometrical modeling problems.
These fibers sustain tensile stress produced by the aforementioned
expansion of the nucleus pulposus that is of keen interest for spine
mechanics [1].
Figure 6: Compressive Stress Applied to an Intervertebral Disc Generates Tensile
Hoop Stress in the Annulus Fibrosus [1]
Inner fibers of the annulus fibrosus attach directly into the vertebral
endplates that bind the disc to the vertebrae. The superior endplate resides
at the top of the intervertebral disc; while, the inferior endplate bonds to
the bottom of the disc structure (Figure 5). Endplates are composed of
cartilage that is loosely bonded to the bone and supported by the
hydrostatic pressure provided by the nucleus pulposus [1].
2.1.3 Ligaments
Upon review of a number of studies for interbody cage design using finite
element methods, certain ligaments of the spine are frequently considered
in analysis:

Page 7 of 34
Figure 7: Section of the Lumbar Spine Including Ligaments (ALL = Anterior
Longitudinal Ligament, PLL = Posterior Longitudinal Ligament, SSL = Supraspinous
Ligament, ISL = Interspinous Ligament, v = Ventral Part, m = Middle Part, d = Dorsal
Part, LF = Ligamentum Flavum) [1]
Interspinous and Supraspinous
The interspinous ligament (ISL) connect the edges of the spinous
processes on the posterior elements of the vertebrae with sheets of
collagen fiber. Supraspinous ligaments (SSL) are actually tendinous fibers
that attach to muscles in the back. These ligaments may be entirely absent
from the lower spine beyond the L3 vertebra. Both the interspinous and
supraspinous ligaments merge together. Their fibers are intertwined,
which significantly increases the combined tensile stiffness of the
ligament structure [1]. This consideration may be key to accurately
modeling any influence of these ligaments on the spine.

Page 8 of 34
Intertransverse
Residing between the transverse processes of the posterior vertebrae
elements, the intertransverse ligament consists of collagen membranes that
separate the ventral muscle compartment from the dorsal muscle
compartment. This ligament stretches most significantly of all the
ligaments of the spine and plays a key role in the action of bending [1].
Ligamentum Flavum
As shown in Figure 7, the ligamentum flavum connects the internal
surface of one posterior lamina of the vertebrae to the external surface of
the one below. This ligament is composed of elastin fibers that stretch and
extend during flexion [1].
Capsular
Situated laterally to the mid-sagittal plane, capsular ligaments resist
bending movement in any direction [1].
Posterior Longitudinal
According to The Biomechanics of Back Pain, “the posterior longitudinal
ligament covers the floor of the vertebral canal,” as shown in Figure 7.
This ligament attaches to the posterior elements and the intervertebral
discs [1].
Anterior Longitudinal
Similar to the posterior longitudinal ligament, the anterior longitudinal
ligament connects to the intervertebral discs and to the anterior edges of
the vertebrae (Figure 7). This ligament is stronger and thicker than its
posterior counterpart [1].
2.2 Interbody Devices
Interbody cages fuse segments of the spine together to reduce back pain for those
patients suffering disc degeneration. According to The Biomechanics of Back
Pain, “Their aim is to restore height, lordosis and sagittal balance, while placing
the remaining annular fibers under tension” [1]. These devices also limit motion
in the fused segment of the spine, which is a key concern in interbody cage
design and analysis.

Page 9 of 34
Types of Interbody Fusion
Analyses and designs for interbody fusion devices often reflect the type of lumbar
interbody fusion surgery that will be used to implement the device. There are
three main categories of lumbar interbody fusion procedures – anterior, posterior,
and transforaminal. Anterior lumbar interbody fusion (ALIF) is performed
through the front of the body and most commonly involves removal of an
intervertebral disc and implantation of a device and bone graft. For diseases such
as scoliosis or spondylolisthesis, posterior lumbar interbody fusion (PLIF) is
utilized. A disc is also removed and an interbody device is implanted with a bone
graft, similar to the procedure for ALIF. Transforaminal lumbar interbody fusion
(TLIF) works on both the anterior and posterior simultaneously [3]. Interbody
fusion also has applications to the cervical and thoracic spine using similar
methods and similar fusion devices, though the scale of these devices differs from
that of the lumbar fusion cages.
Materials for Cage Devices
Interbody cage devices for spinal fusion are manufactured from a variety of
materials. Most commonly used materials include titanium, polyetheretherketone
(PEEK), composites (carbon-fiber reinforced), and bioabsorbable polymers (poly-
L, D-lactic acid (PLDLA)). Though titanium provides significantly large load
bearing capability and strength, its material properties are also much greater than
those of the surrounding bone and tissue components of the spine. These titanium
cages also interfere with radiographic techniques and apply abnormal load
distributions on the vertebral endplates [1]. Materials that display properties
closer to that of the surrounding structure may have clinical benefits over
titanium. In the discussion of design analyses (sections 3.3 and 3.4), the most
commonly used materials are titanium and PEEK; however, section 3.3 attempts
to optimize the properties of a biomaterial for enhancing vertebral fusion.
3. State of the Art Numerical and Analytical Approaches
Understanding the state of the art in numerical and analytical approaches to a variety
of problems in spine mechanics gives insight into the historical foundation of research
and experimentation. This review also helps form future analysis by identifying
limitations in technology or resources, such as time. In this literature review, two
analyses of disc mechanics and two methods for designing interbody fusion cages are
summarized.
3.1 Disc Mechanics
Analysis of intervertebral disc mechanics provides researchers and doctors with a
view of how discs fail and lead to disc replacement or surgical stabilization.
Researchers can also begin to understand how the disc behaves in bending, how

Page 10 of 34
the viscoelastic nucleus pulposus affects disc stress response and failure, and
why certain conditions of the spine increase the risk for disc degeneration and
failure. The following sections provide overviews of the development of an
analytical model of disc mechanics that assumes a uniformly applied
compressive load and an attempt to numerically describe the viscoelastic
behavior of the disc under rapid loading.
3.1.1 Analytical Model of Intervertebral Disc Mechanics
Very few recent studies exist that probe into analytical modeling of the
intervertebral disc structures to determine their mechanical response. One
often cited model by McNally and Arridge [4] examines the mechanical
response of an axisymmetric, thin-walled disc structure under a uniformly
applied load. To develop analytical models of the intervertebral disc, the
geometry is simplified, allowing the disc to be modeled as a whole with
fewer boundary conditions and assumptions than for a numerical model.
This model improves on previous work by allowing the equilibrium
equations to determine the shape the annulus fibers take under load
conditions, rather than prescribing an arbitrary shape.
Figure 8: Schematic Diagram of the Intervertebral Disc in the Coordinate System [4]
A geometrical diagram of the model is displayed by Figure 8. The disc is
axisymmetric with circular symmetry about the z-axis. rθ and rΦ represent
the two radii of curvature for the disc membrane. In this model, the
membrane is the simplified depiction of the annulus fibrosus. By
considering the hydrostatic pressure (p) applied to the membrane by the
central nucleus pulposus, as discussed in section 2.1.2, the components of
the membrane stress (Nθ and NΦ) are in equilibrium:

Page 11 of 34
𝑁𝜃
𝑟𝜃+
𝑁𝜙
𝑟𝜙= 𝑝
Figure 9: Diagram of the Fiber Angle and Membrane Stress Resultants [4]
Figure 9 shows the cross-hatched pattern the alternating layers of the
annulus fibrosus create. The collagen fibers are oriented at an angle β,
which is described in section 2.1.2 as typically an angle of 65o. This
analysis utilizes two different, separate treatments of the collagen fibers.
The first, the trellis rule, states that “the fibres in any one layer are
considered as frictionlessly ‘pin-jointed’ to those in the layer beneath so
that the layers then deform like a piece of trellis [4].”
tan2𝛽
𝑟=
𝑟 sin2 𝛽𝑐
𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐
𝑟𝑐 = 𝑟𝑎𝑑𝑖𝑢𝑠 𝑎𝑡 𝑡ℎ𝑒 𝑒𝑞𝑢𝑎𝑡𝑜𝑟𝑖𝑎𝑙 𝑝𝑙𝑎𝑛𝑒
𝛽𝑐 = 𝛽 𝑎𝑡 𝑡ℎ𝑒 𝑒𝑞𝑢𝑎𝑡𝑜𝑟𝑖𝑎𝑙 𝑝𝑙𝑎𝑛𝑒 (𝑧 = 0, 𝑟 = 𝑟𝑐)
A second treatment of the fibers is performed using the geodesic law.
“Fibres, which are independent of each other, are assumed to take up the
form of curves of shortest length on the surface of revolution [4].”
tan2𝛽
𝑟=
𝑟𝑐2 sin2 𝛽𝑐
[𝑟(𝑟2 − 𝑟𝑐2 sin2 𝛽𝑐)]
By not prescribing the fiber shape, the geometry becomes more complex
but is now driven by the equilibrium equation and these fiber interaction
models.
(1)
(2)
(3)

Page 12 of 34
Figure 10: Diagram of the Equilibrium State of the Membrane [4]
It is assumed in this model that the collagen fibers in the disc membrane
are “inextensible and do not support bending” [4]. Also as mentioned
previously, the disc is assumed to be axisymmetric; therefore, this model
cannot be applied to situations where bending or torsion in the spine are
present, which destroys the symmetry assumptions. For this analysis, a
uniform, compressive load, W, is applied to the superior surface of the
disc, as shown in Figure 10. This load is statically applied and considered
at an instantaneous point in time. The boundary conditions for this model
are listed in Table 1 [4].
Table 1: Boundary and Load Conditions for Analytical Disc Model
Parameter Value Units
Nuclear Pressure (p) 1.67 MPa
Applied Load (W) 1392 N
Radius at Equator (rc) 19.4 Mm
Half-height of Disc Under Load (h) 4.9 mm
Several outputs for the model may be determined, including the fiber
angle, fiber path, fiber tension, fiber length, membrane (annulus fibrosus)
area, and disc volume. Two examples applying the results of the analytical
development were discussed in this study. These examples demonstrate
the bulging that occurs in the intervertebral disc under a compressive load.
In applying these analytical equations, the analyst must apply specific
assumptions and make the appropriate modifications to the model.
Length of the fiber (endplate to endplate) [4]:

Page 13 of 34
Trellis Model
𝐿 = 2 ∫(𝜋𝑝𝑟𝑐
2 − 𝑊)𝑟𝑐2 cos 𝛽𝑐
(𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)12[(𝜋𝑝𝑟𝑐2 − 𝑊)2𝑟𝑐2 cos2 𝛽𝑐 − (𝜋𝑝𝑟2 − 𝑊)2(𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)]
12
𝑑𝑟
𝑟
𝑟𝑐
Geodesic Model
𝐿 = 2 ∫(𝑟(𝜋𝑝𝑟𝑐
2 − 𝑊)
[(𝜋𝑝𝑟𝑐2 − 𝑊)2(𝑟2 − 𝑟𝑐2 sin2 𝛽𝑐) − 𝑟2(𝜋𝑝𝑟2 − 𝑊)2 cos2 𝛽𝑐]12
𝑟
𝑟𝑐
𝑑𝑟
Tension in the fibers [4]:
Trellis Model
𝑇(𝑟) =𝑟𝑐
3(𝜋𝑝𝑟𝑐2 − 𝑊) cos 𝛽𝑐
4𝜋𝑟𝑛(𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)32
𝑛 = 𝑛𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑓𝑖𝑏𝑒𝑟𝑠 𝑝𝑒𝑟 𝑢𝑛𝑖𝑡 𝑤𝑖𝑑𝑡ℎ 𝑝𝑒𝑟𝑝𝑒𝑛𝑑𝑖𝑐𝑢𝑙𝑎𝑟 𝑡𝑜 𝑡ℎ𝑒𝑖𝑟 𝑎𝑥𝑖𝑠
Geodesic Model
𝑇(𝑟) =𝜋𝑝𝑟𝑐
2 − 𝑊
4𝜋𝑛𝑟 cos 𝛽 cos𝛽𝑐
Mean tension in the fibers [4]:
Trellis Model
�̅� =2(𝜋𝑝𝑟𝑐
2 − 𝑊)2𝑟𝑐4 cos2 𝛽𝑐
𝐿𝑁 ∫
𝑑𝑟
𝑔(𝑟)
𝑟
𝑟𝑐
𝑔(𝑟) = (𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)
32 [(𝜋𝑝𝑟𝑐
2 − 𝑊)2𝑟𝑐2 cos2 𝛽𝑐
− (𝜋𝑝𝑟2 − 𝑊)2(𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)]
12
Geodesic Model
𝑇 = 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡
(4)
(5)
(6)
(7)
(8)
(9)

Page 14 of 34
Membrane area [4]:
Trellis Model
𝐴 =
4𝜋(𝜋𝑝𝑟𝑐2 − 𝑊)𝑟𝑐 cos 𝛽𝑐 ∫
𝑟
[(𝜋𝑝𝑟𝑐2 − 𝑊)2𝑟𝑐2 cos2 𝛽𝑐 − (𝜋𝑝𝑟2 − 𝑊)2(𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)]12
𝑑𝑟
𝑟
𝑟𝑐
Geodesic Model
𝐴 =
4𝜋(𝜋𝑝𝑟𝑐2 − 𝑊) ∫
(𝑟2 − 𝑟𝑐2 sin2 𝛽𝑐)
12𝑟
[(𝜋𝑝𝑟𝑐2 − 𝑊)2(𝑟2 − 𝑟𝑐2 sin2 𝛽𝑐) − 𝑟2(𝜋𝑝𝑟2 − 𝑊)2 cos2 𝛽𝑐]12
𝑑𝑟
𝑟
𝑟𝑐
Disc volume [4]:
Trellis Model
𝑉 = 2𝜋 ∫𝑟(𝜋𝑝𝑟2 − 𝑊)(𝑟𝑐
2 − 𝑟2 sin2 𝛽𝑐)12
[(𝜋𝑝𝑟𝑐2 − 𝑊)2𝑟𝑐2 cos2 𝛽𝑐 − (𝜋𝑝𝑟2 − 𝑊)2(𝑟𝑐2 − 𝑟2 sin2 𝛽𝑐)]12
𝑑𝑟
𝑟
𝑟𝑐
Geodesic Model
𝑉 = 2𝜋 ∫(𝜋𝑝𝑟2 − 𝑊)𝑟3 cos 𝛽𝑐
[(𝜋𝑝𝑟𝑐2 − 𝑊)2(𝑟2 − 𝑟𝑐2 sin2 𝛽𝑐) − 𝑟2(𝜋𝑝𝑟2 − 𝑊)2 cos2 𝛽𝑐]12
𝑑𝑟
𝑟
𝑟𝑐
3.1.2 Viscoelastic Numerical Model of Intervertebral Disc Mechanics
As described in section 2.1.2, the nucleus pulposus in the center of the
intervertebral disc exhibits viscoelastic behavior under rapid load
conditions. In the thesis “A First Step towards the Modeling of
Intervertebral Disc Tissue Reconstruction,” a model of this viscoelastic
behavior is attempted using COMSOL. This study utilizes a combination
of a 1-D analytical model and a 3-D finite element model. The viscoelastic
model is based on the Zener model of viscoelasticity. Traditional models
of viscoelasticity, such as the Maxwell model and the Voight model, do
not account for both stress relaxation and creep [5].
(10)
(11)
(12)
(13)

Page 15 of 34
Viscoelastic Model
Viscoelasticity is characterized by hysteresis, stress relaxation, and creep.
When an object is deformed, strain energy is stored within the body.
Under inelastic deformation, where the object does not regain its original
shape, some strain energy remains in the body, which is hysteresis energy
[5]. Stress relaxation occurs under plastic deformation where the level of
strain remains constant, but the stress decreases. As opposed to stress
relaxation, creep results under constant stress where the strain level
increases. The Maxwell model is represented by a spring and a dashpot in
series. The Zener model (Figure 11) incorporates a spring in series with
the Maxwell element [5].
Figure 11: Spring and Dashpot Diagram of the Zener Model [5]
In the case of linear viscoelasticity, the Zener model relation is given by
equation (14).
�̇� +𝐸2
𝜂 𝜎 = (𝐸1 + 𝐸2) 𝜖̇ +
𝐸1𝐸2
𝜂 𝜖
𝜎 = 𝑠𝑡𝑟𝑒𝑠𝑠
𝜂 = 𝑣𝑖𝑠𝑐𝑜𝑠𝑖𝑡𝑦 𝑜𝑓 𝑡ℎ𝑒 𝑚𝑎𝑡𝑒𝑟𝑖𝑎𝑙 𝜖 = 𝑠𝑡𝑟𝑎𝑖𝑛
�̇� = 𝑡𝑖𝑚𝑒 𝑑𝑒𝑟𝑖𝑣𝑎𝑡𝑖𝑣𝑒 𝑜𝑓 𝑠𝑡𝑟𝑒𝑠𝑠
𝜖̇ = 𝑡𝑖𝑚𝑒 𝑑𝑒𝑟𝑖𝑣𝑎𝑡𝑖𝑣𝑒 𝑜𝑓 𝑠𝑡𝑟𝑎𝑖𝑛
𝐸 = 𝑌𝑜𝑢𝑛𝑔′𝑠 𝑀𝑜𝑑𝑢𝑙𝑢𝑠
Under large deformations, the material responds exhibiting non-linear
viscoelastic behavior, which is inseparable in creep and load. For this
analysis, the disc material is assumed to be incompressible. Considering
this assumption, the non-linear viscoelastic response is given by equation
(15) [5].
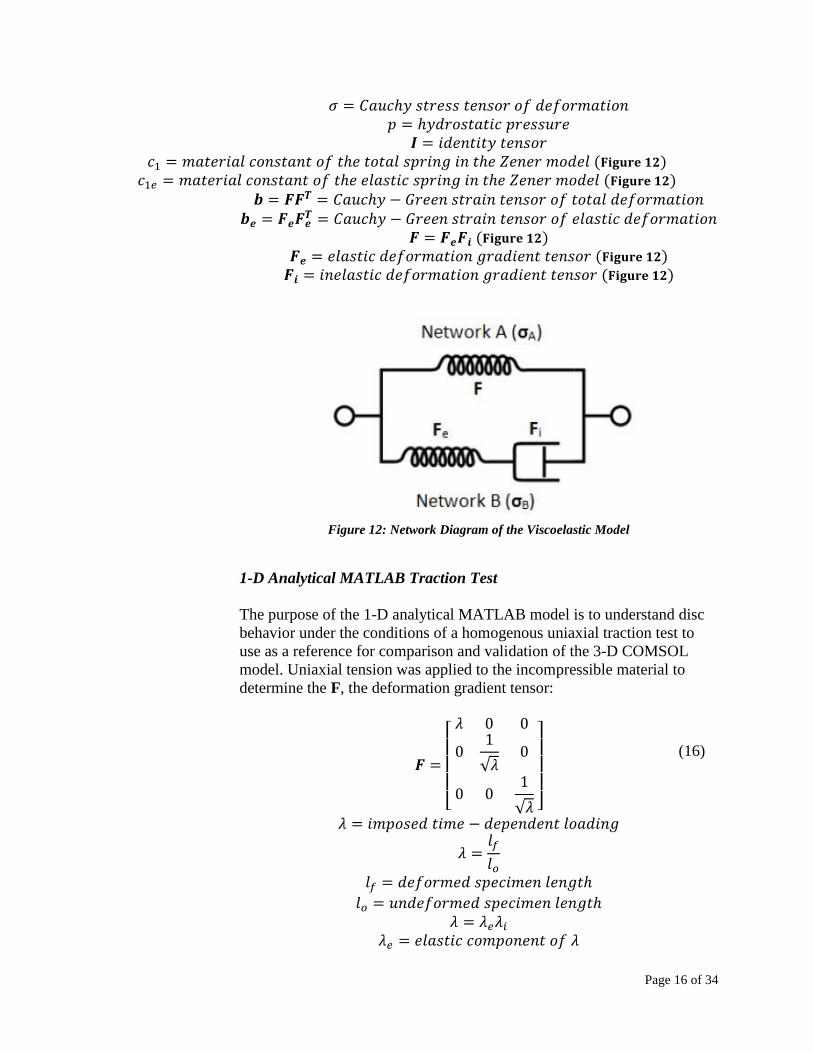
𝜎 = −𝑝𝑰 + 2𝑐1𝒃 + 2𝑐1𝑒𝒃𝒆
(14)
(15)
Page 16 of 34
𝜎 = 𝐶𝑎𝑢𝑐ℎ𝑦 𝑠𝑡𝑟𝑒𝑠𝑠 𝑡𝑒𝑛𝑠𝑜𝑟 𝑜𝑓 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑡𝑖𝑜𝑛
𝑝 = ℎ𝑦𝑑𝑟𝑜𝑠𝑡𝑎𝑡𝑖𝑐 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒
𝑰 = 𝑖𝑑𝑒𝑛𝑡𝑖𝑡𝑦 𝑡𝑒𝑛𝑠𝑜𝑟
𝑐1 = 𝑚𝑎𝑡𝑒𝑟𝑖𝑎𝑙 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 𝑜𝑓 𝑡ℎ𝑒 𝑡𝑜𝑡𝑎𝑙 𝑠𝑝𝑟𝑖𝑛𝑔 𝑖𝑛 𝑡ℎ𝑒 𝑍𝑒𝑛𝑒𝑟 𝑚𝑜𝑑𝑒𝑙 (𝐅𝐢𝐠𝐮𝐫𝐞 𝟏𝟐)
𝑐1𝑒 = 𝑚𝑎𝑡𝑒𝑟𝑖𝑎𝑙 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 𝑜𝑓 𝑡ℎ𝑒 𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑠𝑝𝑟𝑖𝑛𝑔 𝑖𝑛 𝑡ℎ𝑒 𝑍𝑒𝑛𝑒𝑟 𝑚𝑜𝑑𝑒𝑙 (𝐅𝐢𝐠𝐮𝐫𝐞 𝟏𝟐)
𝒃 = 𝑭𝑭𝑻 = 𝐶𝑎𝑢𝑐ℎ𝑦 − 𝐺𝑟𝑒𝑒𝑛 𝑠𝑡𝑟𝑎𝑖𝑛 𝑡𝑒𝑛𝑠𝑜𝑟 𝑜𝑓 𝑡𝑜𝑡𝑎𝑙 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑡𝑖𝑜𝑛
𝒃𝒆 = 𝑭𝒆𝑭𝒆𝑻 = 𝐶𝑎𝑢𝑐ℎ𝑦 − 𝐺𝑟𝑒𝑒𝑛 𝑠𝑡𝑟𝑎𝑖𝑛 𝑡𝑒𝑛𝑠𝑜𝑟 𝑜𝑓 𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑡𝑖𝑜𝑛
𝑭 = 𝑭𝒆𝑭𝒊 (𝐅𝐢𝐠𝐮𝐫𝐞 𝟏𝟐)
𝑭𝒆 = 𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑡𝑖𝑜𝑛 𝑔𝑟𝑎𝑑𝑖𝑒𝑛𝑡 𝑡𝑒𝑛𝑠𝑜𝑟 (𝐅𝐢𝐠𝐮𝐫𝐞 𝟏𝟐)
𝑭𝒊 = 𝑖𝑛𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑑𝑒𝑓𝑜𝑟𝑚𝑎𝑡𝑖𝑜𝑛 𝑔𝑟𝑎𝑑𝑖𝑒𝑛𝑡 𝑡𝑒𝑛𝑠𝑜𝑟 (𝐅𝐢𝐠𝐮𝐫𝐞 𝟏𝟐)
Figure 12: Network Diagram of the Viscoelastic Model
1-D Analytical MATLAB Traction Test
The purpose of the 1-D analytical MATLAB model is to understand disc
behavior under the conditions of a homogenous uniaxial traction test to
use as a reference for comparison and validation of the 3-D COMSOL
model. Uniaxial tension was applied to the incompressible material to
determine the F, the deformation gradient tensor:
𝑭 =
[
𝜆 0 0
01
√𝜆0
0 01
√𝜆
]
𝜆 = 𝑖𝑚𝑝𝑜𝑠𝑒𝑑 𝑡𝑖𝑚𝑒 − 𝑑𝑒𝑝𝑒𝑛𝑑𝑒𝑛𝑡 𝑙𝑜𝑎𝑑𝑖𝑛𝑔
𝜆 =𝑙𝑓
𝑙𝑜
𝑙𝑓 = 𝑑𝑒𝑓𝑜𝑟𝑚𝑒𝑑 𝑠𝑝𝑒𝑐𝑖𝑚𝑒𝑛 𝑙𝑒𝑛𝑔𝑡ℎ
𝑙𝑜 = 𝑢𝑛𝑑𝑒𝑓𝑜𝑟𝑚𝑒𝑑 𝑠𝑝𝑒𝑐𝑖𝑚𝑒𝑛 𝑙𝑒𝑛𝑔𝑡ℎ
𝜆 = 𝜆𝑒𝜆𝑖
𝜆𝑒 = 𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑜𝑓 𝜆
(16)

Page 17 of 34
𝜆𝑖 = 𝑖𝑛𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 𝑜𝑓 𝜆
The MATLAB code computes λ, F, σA (Figure 12) at the beginning of
each time step. Then the previous value of λi is used to calculate λe. The
elastic component provides the Fe tensor, which is used to estimate σB
(Figure 12). After applying the Euler method for solving first-order
ordinary differential equations (ODEs), the code determines a new
inelastic deformation gradient tensor (Fi) and a new λi. When the final
value of λi is determined to be within the error limit compared to the
previous λi, the test is complete [5]. Appendix B of “A First Step towards
the Modeling of Intervertebral Disc Tissue Reconstruction” contains a full
listing of the MATLAB code used for this test.
This model characterizes the three material parameters for nonlinear
viscoelasticity: c1, c1e, and η. From these parameters, two characteristic
times are defined to separate the purely viscous response (equation (17))
from the elastic response (equation (18)):
𝜏𝑒 =𝜂
𝑐1𝑒= 𝑡𝑖𝑚𝑒 𝑡𝑜 𝑝𝑢𝑟𝑒𝑙𝑦 𝑣𝑖𝑠𝑐𝑜𝑢𝑠 𝑟𝑒𝑠𝑝𝑜𝑛𝑠𝑒
𝜏 =𝜂
𝑐1= 𝑡𝑖𝑚𝑒 𝑡𝑜 𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑟𝑒𝑠𝑝𝑜𝑛𝑠𝑒
For a given triangular strain history, the code output results for τ, τe, and η,
which are displayed in Figures 13-15 [5].
Figure 13: Influence of Parameter τ for c1e = 0 and ɳ = 1 [5]
(17)
(18)

Page 18 of 34
Figure 14: Influence of Parameter τe for c1 = 0 and ɳ = 1 [5]
Figure 15: Influence of Parameter ɳ for c1 and c1e = 1 [5]
Based on these trends, c1 (Figure 13) provides global stiffness and
instantaneous response; whereas, c1e (Figure 14) and η (Figure 15)
determine the viscoelastic behavior [5].

Page 19 of 34
3-D and Axisymmetric 2-D COMSOL Models
COMSOL Multiphysics software was leveraged in this viscoelastic
analysis for finite element modeling. Appendix A of “A First Step towards
the Modeling of Intervertebral Disc Tissue Reconstruction” contains a
detailed listing of specific expressions implemented in the COMSOL
model. The models implemented in this analysis represent a
homogeneous, incompressible intervertebral disc of cylindrical shape.
Additionally, the 2-D model reflects an axisymmetric geometry (Table 2).
Analysis for this case determines only the stresses and deformation in the r
and z directions [5].
Table 2: Intervertebral Disc Dimensions for 2-D Axisymmetric COMSOL Model
Parameter Value Units
Nucleus Pulposus Radius 12 mm
Disc Radius 23 mm
Disc Height 12 mm
To simulate the axisymmetric 2-D case in COMSOL, the following
boundary conditions were applied:
r direction: constrain nodes along the axis of symmetry
r direction: constrain nodes along the vertebral end plates (top and
bottom)
z direction: constrain the bottom, rigid and fixed
Two sets of three material parameters (c1, c1e, and η) defined the
incompressible disc, one set each for the nucleus pulposus and the annulus
fibrosus [5].
When a characteristic time of ten seconds and all material parameters set
to equal one, COMSOL produced results for both the disc pressure
distribution and its von Mises stress distribution, shown in Figure 16 and
Figure 17, respectively.

Page 20 of 34
Figure 16: Pressure Distribution within the Intervertebral Disc [5]
Figure 17: von Mises Stress Distribution within the Intervertebral Disc [5]
Then, elastic parameters were assigned to the annulus fibrosus and
viscoelastic parameters were assigned to the nucleus pulposus (Table 3) in
order to simulate the force responses within the intervertebral disc.
Table 3: Material Constants for COMSOL Simulation
𝒄𝟏𝒆𝑨𝑭
𝜼𝑨𝑭 𝒄𝟏𝑨𝑭 𝒄𝟏
𝑵𝑷
0.0001 1 1 0.001

Page 21 of 34
This study outlined three series of simulations performed in COMSOL.
The first series did not converge; meanwhile, the second and third series
show a nearly perfect elastic response, which does not reflect the reality of
disc mechanics. Figure 18 indicates that the force response of the nucleus
pulposus contributes minimally to the total response in the intervertebral
disc [5]. Potential causes of this issue, as well as limitations of these
models is discussed in section 4.1.1.
Figure 18: Annulus Fibrosus (AF) and Nucleus Pulposus (NP) Relative Contributions
to the Intervertebral Disc (IVD) Resultant Force [5]
Results displayed in Figure 18 were based on the parameters contained in
Table 4.
Table 4: COMSOL Simulation Parameters for the Nucleus Pulposus
𝜼𝑵𝑷 𝝉𝑵𝑷 𝒄𝟏𝒆𝑵𝑷 𝝉𝒆
𝑵𝑷
0.01 10 1 0.01
3.2 Ligament Models
As discussed in section 2.1.3, seven ligaments are frequently used in numerical
models of the spine. However, many analyses do not model the ligaments at all.
Studies generally relating to the spine and problems in spine mechanics do not
generally focus on the effects of the ligaments or the loads they carry. The

Page 22 of 34
previously discussed models of the intervertebral disc (sections 3.1.1 and 3.1.2)
focused solely on the disc structure and not on the spine as a whole; therefore,
those analyses did not attempt to model any of the ligamentous components. In
consideration of the analysis methods utilized for interbody device design
(sections 3.3 and 3.4), there are a variety of approaches for modeling the
ligaments:
Absent – no ligaments are included in the numerical analysis [7]
Nonlinear springs
2 node or 3-D truss elements [6]
3.3 Multiscale Optimization
In a 2015 study, “Development of a Spinal Fusion Cage by Multiscale Modelling:
Application to the Human Cervical Spine,” a multiscale optimization approach
was attempted in order to enhance spinal fusion. Optimization focused on the
osteoconductivity (microstructure) and stiffness of the cage device. Constraints
on structure permeability are applied to obtain ideal device osteoconductivity. In
consideration of the cage stiffness, optimization considered the basic spine
motions of flexion, extension, bending, and axial rotation (section 2.1) [6].
Figure 19: Geometrical Model (C2-T1) [6]
A geometrical (Figure 19), finite element model (C2-T1) developed from CT
images of a healthy, adult subject formed the basis for this study. The spine
model included cortical and trabecular bone, the annulus fibrosus and nucleus
pulposus, and five ligaments (ALL, PLL, FL, ISL, and CL). Section 2.1 provides
further background on these biological components.

Page 23 of 34
Vertebrae and intervertebral disc structures were assumed to exhibit linear elastic
behavior and were modeled using tetrahedral elements in ABAQUS. Ligaments
were added to the model with 3-D truss elements that attached to their
corresponding anatomical insertion points through a coupling interaction. Figure
20 displays the finite element model via a 3-D visualization [6].
Figure 20: Finite Element Model (C2-T1) [6]
The desired result of this multiscale optimization is the idealized properties of a
linear, isotropic biomaterial that enhances vertebral fusion. A unit-cell of scaffold
material with a porous periodic microstructure is initially assumed prior to
executing the optimization. The objective is to optimize the structure on a global
scale (stiffness) and a micro-scale (osteoconductivity, material permeability), so a
two-scale optimization is arranged [6]:
𝑡 = 𝑡𝑟𝑎𝑐𝑡𝑖𝑜𝑛𝑠 𝑎𝑝𝑝𝑙𝑖𝑒𝑑 𝑡𝑜 𝑠𝑢𝑟𝑓𝑎𝑐𝑒
Γ = 𝑏𝑜𝑑𝑦 𝑠𝑢𝑟𝑓𝑎𝑐𝑒
𝑏 = 𝑏𝑜𝑑𝑦 𝑙𝑜𝑎𝑑𝑠
𝜌 = 𝑚𝑎𝑐𝑟𝑜 − 𝑠𝑐𝑎𝑙𝑒 𝑑𝑒𝑛𝑠𝑖𝑡𝑦
𝜇 = 𝑚𝑖𝑐𝑟𝑜 − 𝑠𝑐𝑎𝑙𝑒 𝑑𝑒𝑛𝑠𝑖𝑡𝑦
0 ≤ 𝜌 ≤ 1
0 ≤ 𝜇 ≤ 1
𝐻 = ℎ𝑜𝑚𝑜𝑔𝑒𝑛𝑖𝑧𝑒𝑑 𝑡𝑒𝑛𝑠𝑜𝑟
𝑃 = 𝑛𝑢𝑚𝑏𝑒𝑟 𝑜𝑓 𝑒𝑥𝑡𝑒𝑟𝑛𝑎𝑙 𝑙𝑜𝑎𝑑 𝑐𝑎𝑠𝑒𝑠
(19)

Page 24 of 34
𝛼 = 𝑤𝑒𝑖𝑔ℎ𝑡 𝑓𝑎𝑐𝑡𝑜𝑟𝑠
𝑌 = 𝑢𝑛𝑖𝑡 𝑐𝑒𝑙𝑙 𝑑𝑜𝑚𝑎𝑖𝑛
𝐸𝑖𝑗𝑘𝑙 = 𝐸𝑙𝑎𝑠𝑡𝑖𝑐 (𝑌𝑜𝑢𝑛𝑔′𝑠) 𝑚𝑜𝑑𝑢𝑙𝑢𝑠
𝐾 = 𝑠𝑡𝑖𝑓𝑓𝑛𝑒𝑠𝑠
�̅� = 𝑟𝑒𝑠𝑜𝑢𝑟𝑐𝑒 𝑐𝑜𝑛𝑠𝑡𝑟𝑎𝑖𝑛𝑡
When ρ or µ are equal to zero, a void is present. Conversely, ρ or µ equal to one
represents a solid space. ρ also takes intermediate, non-integer values that indicate
a prescribed volume fraction for the material. First, the inner problem of elasticity
must be solved using equation (20) for the homogenized elastic tensor [6].
𝐸𝑖𝑗𝑘𝑙𝐻 =
1
|𝑌|∫𝐸𝑝𝑞𝑟𝑠(𝜇) (𝛿𝑟𝑘 𝛿𝑠𝑙 −
𝜕𝜒𝑟𝑘𝑙
𝛿𝑦𝑠
) (𝛿𝑝𝑖𝛿𝑞𝑗 −𝜕𝜒𝑝
𝑖𝑗
𝛿𝑦𝑞
)𝑑𝑌
𝑌
𝑌 = 𝑢𝑛𝑖𝑡 𝑐𝑒𝑙𝑙 𝑑𝑜𝑚𝑎𝑖𝑛
|𝑌| = 1
In consideration of the set of six equilibrium equations in the Y domain, the
homogenized tensor is dependent on the micro-displacements χ, as described by
equation (21) [6].
∫𝐸𝑖𝑗𝑝𝑞(𝜇)𝜕𝜒𝑃
𝑘𝑙
𝑦𝑞
𝜕𝑤𝑖
𝜕𝑦𝑗 𝑑𝑌
𝑌
= ∫𝐸𝑖𝑗𝑘𝑙(𝜇)𝜕𝑤𝑖
𝜕𝑦𝑗 𝑑𝑌
𝑌
However, when the tensor depends instead on the elastic properties of the
microstructure, E is dependent on µ and follows the relationship in equation (22)
[6].
𝐸𝑖𝑗𝑘𝑙(𝜇) = 𝜇𝑃𝐸𝑖𝑗𝑘𝑙0
𝐸𝑖𝑗𝑘𝑙0 = 𝑒𝑙𝑎𝑠𝑡𝑖𝑐 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 𝑜𝑓 𝑎 𝑠𝑜𝑙𝑖𝑑, 𝑙𝑖𝑛𝑒𝑎𝑟 𝑖𝑠𝑜𝑡𝑟𝑜𝑝𝑖𝑐 𝑚𝑎𝑡𝑒𝑟𝑖𝑎𝑙
After determining the material distribution from the inner optimization, it is used
as a constraint in the outer optimization problem, which deals with the
permeability of the material. The permeability tensor is orthotropic and given by
equation 23 [6].
𝐾𝑖𝑗𝐻 =
1
|𝑌| ∫𝐾𝑠𝑚 (𝛿𝑖𝑠 −
𝜕𝜒𝑖
𝜕𝑦𝑠)(𝛿𝑚𝑗 −
𝛿𝜒𝑗
𝛿𝑦𝑚) 𝑑𝑌
𝑌
An interpolation is then performed between permeability and the local density
via:
𝐾𝑖𝑚(𝜇) = (1 − 𝜇)𝑃 𝐾𝑖𝑚0 (𝜇)
𝐾0 = 𝑢𝑛𝑖𝑡𝑎𝑟𝑦, 𝑑𝑖𝑎𝑔𝑜𝑛𝑎𝑙, 𝑎𝑛𝑑 𝑖𝑠𝑜𝑡𝑟𝑜𝑝𝑖𝑐 𝑡𝑒𝑛𝑠𝑜𝑟
(20)
(21)
(22)
(23)
(24)

Page 25 of 34
This optimization is performed by sequentially calculating “the global and local
problem variables by the Method of Moving Asymptotes (MMA) and the
CONvex LINearization methods (CONLIN), respectively” [6]. The cage design
that results from this multiscale optimization proves to be useful for site-specific
scaffolds by accounting for both the overall spine behavior in flexion, extension,
lateral bending, and axial rotation and the site-specific boundary conditions.
3.4 Artificial Neural Networks
The use of artificial neural networks (ANN), as proposed by Nassau, et al, aims to
improve the computational efficiency of the cage design optimization process for
an ALIF cage. When finite element analysis (FEA) design inputs change, large
output changes result, which make FEA difficult to utilize for cage design
optimization. Traditional optimization methods are often computationally
intensive and inefficient. In the proposed design process, Taguchi statistical
methods and FEA combine with ANN to minimize the number of experimental
runs to optimize parameters for limiting potential fusion failure [7].
Figure 21: Design Process for ALIF Cage Design [7]
The first stage of the design process outlined in Figure 21 organizes the design
variables in a Taguchi framework. Taguchi statistical methods enable multiple
design variable modifications for each design in order to limit the number of
experimental runs and to improve the quality of the design. Used in combination
with FEA, this statistical method reduces the time spent during this stage of the
optimization process over that for traditional multiple linear regression [7].
Six design variables were arranged in the Taguchi matrix:
Cage material – analyzed within the property ranges for PEEK and
titanium
Ridge height – within the range of interface heights for commercially
available devices
Ridge width
Ridge oblique
Ridge rows – evenly spaced along the surface of the cage
Graft area

Page 26 of 34
A combination of SolidWorks 2011 and Abaqus/CAE 6.9 were used to perform
the FEA. Surface-to-surface frictionless contact interfaces were implemented with
no slip conditions with the cage positioned on the inferior vertebral body. A 1200
N uniform, compressive load was applied to the implant to simulate typical load
requirements for the lumbar spine. The parameters input for the FEA model are
summarized in Table 5 [7].
Table 5: FEA Input Parameters
Parameter Value Units
Poisson’s Ratio Cancellous Bone 0.3
Poisson’s Ratio Cortical Bone 0.3
Poisson’s Ratio Implant 0.3
Elastic Modulus Bone 137.5 MPa
Elastic Modulus 0.5 mm Partitioned Cortical Bone 12.0 GPa
Elastic Modulus Implant PEEK 3.6 GPa
Elastic Modulus Implant Ti6Al4V 110.0 GPa
Implant Height (constant, not including ridges) 6 mm
Implant Length 34 mm
Implant Width 26 mm
Bone Length 40 mm
Bone Width 40 mm
Bone Height 50 mm
Next, the ANN coding was implemented using Python version 2.7. In these
software simulations, a network of artificial neurons accomplishes a set task and
determines the cost of performing that task (output). According to Nassau, et al,
“ANNs can reduce the time and effort spent in model development and
computation time.” This process requires application of learning methods, which
include supervised, unsupervised, and reinforced learning. Since the design
variable inputs are determined from the combination of Taguchi statistical
methods and FEA, supervised learning is utilized [7].
The costs (outputs) used for learning are the maximal von Mises stresses on the
vertebra. Through the learning functions, the weights between variable
connections from the Taguchi matrix are updated. As shown in Figure 22, the
variable inputs (cage material, ridge height, ridge width, ridge oblique, ridge
rows, and graft area) represent individual neurons that are trained to reach the
single output neuron (von Mises stress) [7].

Page 27 of 34
Figure 22: Artificial Neural Network Process Diagram [7]
After 10,000 training executions in the ANN process, a solution was achieved at
30-45 minutes per model. Results from 30 models are presented in “Analysis of
Spinal Lumbar Interbody Fusion Cage Subsidence using Taguchi Method, Finite
Element Analysis, and Artificial Neural Network” with the final optimal result
shown here in Table 6.
Table 6: Final Result of ANN Analysis
Run
Cage Material
(GPa)
Ridge Height
(mm)
Ridge Width
(mm)
Ridge
Oblique (o)
Ridge
Rows
Graft Area
(mm2)
O3 3.600 1.400 1.000 104.000 11 224.000
4. Discussion
Each of the analyses summarized in section 3 utilizes a number of assumptions that
limit its use to a narrower range of specific scenarios of spine mechanics. These
analyses are often also limited by the available resources; however, limitations do not
make these models unimportant. Limitations of analyses may be overcome by
modifying assumptions, obtaining additional experimental data, refining the
simulations, or improving technology. Recommendations for future analysis of
intervertebral disc mechanics and for design of interbody fusion devices may increase
the range of problems in spine mechanics that may be studied using analytical and
numerical techniques.

Page 28 of 34
4.1 Model Limitations
4.1.1 Disc Model Limitations
Analytical Model of Intervertebral Disc Mechanics
The development of an analytical model for intervertebral disc mechanics
[4] relied on the assumption that the disc is axisymmetric. This assumption
precludes any models involving flexion or lateral bending, which are
typically asymmetric applications. Any deviation from horizontal, parallel
vertebral end plates that may be caused by disease, injury, or movement
also displays asymmetry such that this model must be modified.
This model also does not determine the specific interaction of the lamellae
in the annulus fibrosus. The model considers only two lamellae though the
annulus fibrosus contains 10-20 lamellae of alternating orientation. Disc
degeneration is caused by structural failure. In the annulus fibrosus,
circumferential tears, peripheral rim tears, and radial fissures cause
structural failure. The internal lamellae of the annulus may also buckle,
causing gross internal failure of the disc [1]. By simplifying the geometry
of the annulus fibrosus to produce an analytical model, rather than a
numerical one, this model is limited for studying the potential failure
conditions for intervertebral discs.
Viscoelastic Numerical Model of Intervertebral Disc Mechanics
The model of viscoelastic behavior of the intervertebral disc [5] produced
some unusual results that were not consistent with known disc behavior.
The model generated results that were almost perfectly elastic, which
indicates that the disc behavior is almost entirely governed by the annulus
fibrosus response. The author of the study included a validation of the
viscoelastic model in COMSOL to negate any concerns that the viscous
response was improperly modeled [5]. Rather, it is possible that the
annulus fibrosus model in COMSOL was too coarse and did not account
for the anisotropic structure of the lamellae.
During this study, a full sensitivity analysis could not be performed on the
parameters controlling the disc behavior. This posed convergence
difficulties for most of the simulations that were executed and yielded
unsatisfactory results [5]. Though direct application of these parameters
provided limited and unexpected results, further refinement and adjusted
parameters may improve the analysis.
Similar to the development of an analytical model of disc mechanics, this
model assumed that the disc exhibited axisymmetric geometry. Thus,

Page 29 of 34
adjustments would be required to analyze cases of flexion, extension, or
bending.
4.1.2 Multiscale Optimization Limitations
The multiscale optimization method explored in section 3.3 sought to
enhance bone fusion at the cage insertion site in the cervical spine. This
optimization resulted in an interbody fusion cage design of a biomaterial
that met requirements for osteoconductivity (permeability) and structural
strength [6]. A two-scale optimization with a full finite element model of
the cervical spine (C2-T1) is computationally strenuous, which limits the
simulation flexibility and complexity. The computational requirements
also impose time constraints for running simulations, which are important
considerations for the researcher.
Modeling trade-offs were required to reduce or limit the computational
strain of the simulations. To simplify the optimization model, linear elastic
properties were applied to the structures. This simplification and
assumption frequently appears in analytical and numerical treatment of
problems in spine mechanics.
4.1.3 Artificial Neural Networks Limitations
The use of artificial neural networks for analysis is limited by the amount
of data applied to the training iterations to increase the accuracy of the
program. Additional time spent generating data in the training runs to
increase the accuracy of the program restricts the time available for other
stages of the process or extends the analysis time. By extending the
analysis time, the efficiency of the ANN analysis decreases, thus negating
a major benefit of this analysis.
Due to significant differences in design for different types of interbody
fusion devices, results cannot be compared among a variety of devices.
This analysis specifically pertained to boxed ALIF interbody cages with
continuous ridges at the interface or surface contact points. The results
from this particular ANN procedure will not be directly comparable to
another.
Additionally, this study focused solely on the von Mises stress as the
critical parameter for predicted subsidence and failure of the graft. Other
parameters or other purposes for this analysis may be applied; however,
modifications would need to be made. For instance, the training
procedures and functions would likely differ from those used in this
analysis, and the variables represented by the neurons may be entirely
different to achieve new objectives. Though this process is not limited by

Page 30 of 34
any of these considerations, further investigation is needed to establish and
validate additional models.
4.2 Future Analysis Opportunities
4.2.1 Disc Analysis
Future study into the mechanical response of intervertebral discs that
analyzes cases of bending, asymmetric, or non-uniform loads would
advance the understanding of disc behavior in damaged or diseased spinal
columns. Many studies, including the two outlined in section 3.1, assume
a healthy disc that displays axisymmetric geometry under a uniform
compressive load. These simplifications create a simpler problem that can
be solved analytically or numerically.
Analytical problems generally involve simplifying assumptions,
particularly regarding geometry. Numerical methods provide the ability to
quickly analyze complex geometries but may involve assumptions for the
material parameters at each node. A combination of both techniques gives
insight into different aspects of disc behavior.
The viscoelastic model reviewed here (section 3.1.2), involved
simplifications to eliminate modeling complications due to the anisotropy
of the annulus fibrosus. Disc failure occurs due to buckling or tearing in
the lamellae of the annulus fibrosus, so this component of the disc is
critical to an accurate model of disc mechanics. To fully understand why
discs fail more often in people diagnosed with spinal diseases such as
scoliosis and spondylolisthesis, researchers and physicians need to
examine the annulus in detail through simulations that more closely reflect
experimental disc responses. The disc response in this study did not
display the expected viscoelasticity that is known to occur in intervertebral
disc experiments. Other constitutive viscoelastic relationships should be
investigated to determine the most appropriate for modeling disc
responses.
Further experimentation may be performed on intervertebral discs,
particularly of the lumbar region. Experimental results reflecting disc
behavior provide a source against which to validate analytical and
experimental models. Previous experimentation regarding the
intervertebral discs, as discussed in the development of an analytical
model by McNally and Arridge [4], required sectioning the disc to
experimentally test the annulus fibrosus, which destroys its load bearing
capability. New experimental techniques or imaging technologies may
help to increase knowledge of actual disc response and may provide
additional data to validate against for mathematical simulations.

Page 31 of 34
4.2.2 Interbody Device Design
Section 3.3 discussed the application of a two-scale design optimization
for cervical interbody fusion cage design. This multiscale optimization
approach enhanced the effect of fusion (osteoconductivity) and satisfied
the structural requirements for load bearing. Optimal parameters for a
biomaterial for cage construction resulted from the intensive analysis.
However, the analysis is computationally inefficient and time consuming.
The computational efficiency of the model may be investigated further to
determine improvements in handling the optimization. One simplification
that was introduced into the analysis [6] was that all structures display
linear elastic behavior. Though this assumption is common throughout
spine mechanics literature, greater insight may be gained through more
complex modeling of the material parameters for each structure. Due to
this additional complexity, the optimization would, however, be less
efficient and significantly more time intensive. Before adjusting the
model, a cost-benefit analysis should be performed to determine the
advantage of increased complexity and model refinement.
This interbody fusion cage design development pertained specifically to
the cervical region of the spine. Future extension of this study could apply
this same design process to interbody cages for the lumbar region, where
the bone structures and load bearing requirements differ from that of the
cervical region. Resulting designs and optimal material parameters may
then be compared to those for commercially available devices to quantify
the magnitude of any improvement this optimization process yields.
Future investigation of the application of artificial neural networks (ANN)
could extend the analysis to cages of other design. The same process may
be applied to determine the optimal parameters to minimize the probability
for fusion failure for PLIF and TLIF cages. The geometry of these cages
differs from that of the ALIF cage modeled in the study by Nassau, et al
[7]. These cages also generate possible undesirable issues for the patient
other than fusion failure. Additional modeling could incorporate multiple
objectives (costs, outputs) to analyze simultaneously using the ANN. This
process provides increased computational efficiency for analyzing
multiple objectives compared to the multiscale optimization method.
4.3 Summary
Four state of the art approaches to solving problems in spine mechanics were
summarized in this literature review. Two of these focused on problems in
intervertebral disc mechanics; while, the remaining studies presented state of the
art methods for optimizing interbody fusion cage design through the use of

Page 32 of 34
multiscale optimization and artificial neural networks. Each of these analyses
were limited by assumptions, such as axisymmetric structures and linear elastic
material properties for all components. In particular, the development of an
analytical model for disc mechanics assumed an axisymmetric disc under a
uniform compressive load, which makes this model unsuitable to study cases of
bending or asymmetric loading due to spinal disease, as in the case of scoliosis.
Other limiting conditions included computational efficiency of the method and
time. These conditions required simplifications and tradeoffs to be made in order
to generate significant results. In the case of artificial neural networks, a single
objective was pursued in favor of computational efficiency, rather than delving
into a more time consuming analysis with multiple objectives and additional
iterations. Even considering the typical limitations of analytical and numerical
analyses, these models form a basis further extension and research into spine
mechanics.

Page 33 of 34
References
1. Adams, M. A. (2013). The biomechanics of back pain (3rd ed.). Edinburgh, NY: Churchil
Livingstone.
2. Wang, X. (2013). Development of a computationally efficient finite element model of the
human spine for the purpose of conducting parametric studies of the stresses
induced in the spine and in spinal fusion instrumentation hardware during flexion,
torsion and extension. Raleigh, NC: North Carolina State University.
3. The ABCs of spinal fusion surgery: ALIF, PLIF, and TLIF. (n.d.). Retrieved April 24,
2016, from University Spine Center website:
http://www.universityspinecenter.com/the-abcs-of-spinal-fusion-surgery-alif-plif-
and-tlif
4. McNally, D. S., & Arridge, R. G. (1995). An analytical model of intervertebral disc
mechanics. Biomechanics, 28(1), 53-68. http://dx.doi.org/10.1016/0021-
9290(95)80007-7
5. Brulliard, V. (2010, May). A first step towards the modeling of intervertebral disc tissue
reconstruction.
6. Coelho, P. G., Fernandes, P. C., Folgado, J., & Fernandes, P. R. (2015). Development of
a spinal fusion cage by multiscale modelling: Application to the human cervical
spine. Procedia Engineering, 110, 183-190.
http://dx.doi.org/10.1016/j.proeng.2015.06.183
7. Nassau, C. J., Litofsky, N. S., & Lin, Y. (2012). Analysis of spinal lumbar interbody
fusion cage subsidence using Taguchi method, finite element analysis, and

Page 34 of 34
artificial neural network. Mechanical Engineering, 7(3), 247-255.
http://dx.doi.org/10.1007/s11465-012-0335-2





























