Embed Size (px)
Citation preview

Journal of Applied Mathematics and Physics, 2018, 6, 2681-2696 http://www.scirp.org/journal/jamp
ISSN Online: 2327-4379 ISSN Print: 2327-4352
DOI: 10.4236/jamp.2018.612222 Dec. 29, 2018 2681 Journal of Applied Mathematics and Physics
Lie Symmetry Analysis, Optimal Systems and Explicit Solutions of the Dispersive Long Wave Equations
Xiaomei Xue, Yushan Bai
Department of Mathematics, Inner Mongolia University of Technology, Hohhot, China
Abstract In this paper, the dispersive long wave equation is studied by Lie symmetry group theory. Firstly, the Lie symmetries of this system are calculated. Se-condly, one dimensional optimal systems of Lie algebra and all the symmetry reductions are obtained. Finally, based on the power series method and the extended Tanh function method, some new explicit solutions of this system are constructed.
Keywords Dispersive Long Wave Equations, Lie Symmetry Analysis, Optimal Systems, Power Series Method, Extended Tanh Function Method, Explicit Solutions
1. Introduction
In mathematical physics, many significant phenomena and dynamic processes can be represented by nonlinear partial differential equations (NLPDEs) [1] [2] [3] [4]. Therefore, it is very important to find the solution of NLPDEs. A wealth of effective methods have been developed to explore the solutions of the NLPDEs, such as Adomian decomposition method [5], Darboux and Backlund transformations [6], Hirota bilinear method [7] [8] [9], and Lie symmetry me-thod [10] [11], etc. The Lie symmetry method for constructing explicit solutions of the NLPDEs has been regarded as one of the most widely applicable methods [12] [13] [14]. Its core idea is the invariance principle of the NLPDEs under the action of Lie point transformation group (point symmetry) [10]. In recent years, there has been a great deal of research and considerable development in the symmetry field of differential equations, in terms of the number of academic papers, books and new symbolic programs dedicated to this subject [15]-[20].
How to cite this paper: Xue, X.M. and Bai, Y.S. (2018) Lie Symmetry Analysis, Optim-al Systems and Explicit Solutions of the Dispersive Long Wave Equations. Journal of Applied Mathematics and Physics, 6, 2681-2696. https://doi.org/10.4236/jamp.2018.612222 Received: November 23, 2018 Accepted: December 26, 2018 Published: December 29, 2018 Copyright © 2018 by author(s) and Scientific Research Publishing Inc. This work is licensed under the Creative Commons Attribution International License (CC BY 4.0). http://creativecommons.org/licenses/by/4.0/
Open Access

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2682 Journal of Applied Mathematics and Physics
At present, there is no general method for solving NLPDEs. Although the symmetry method has a wide range of applications in solving methods, it still faces many difficulties and challenges to promote its development. However, the symmetry method and other methods (e.g. generalized simple equation method [21], generalized Tanh function method [22], homotopy perturbation method [23] and power series method [24], etc.) are effectively combined to reflect the complementarity of each other, which makes it possible to obtain exact solutions of some NLPDEs with physical significance, and attracts the attention and re-search of many scholars [25] [26] [27].
In the present paper, based on the Lie group method, we will investigate the dispersive long wave equations
( )( )
21 0,2
0,
t x x
t xx x
u v u
v uv u u
+ + = + + + =
(1)
where u represents the amplitude of a surface wave, propagating along the x-axis with a horizontal velocity. It plays an important role in nonlinear physics [28] [29], considered as a good model for the study of bidirectional solitons in water waves. In [30] [31], Eckhaus and Boiti et al. presented the extensions of Equation (1) in higher-dimensional spaces. In [32], Zhang J F et al. discussed its some new multi-soliton solutions and travelling wave solutions using the extended homo-geneous balance method, etc.
The outline of this paper is as follows: in Section 2, the Lie symmetry analysis is performed for the dispersive long wave equations; in Section 3, the optimal systems and the similarity reductions of Equation (1) are researched employing Lie group analysis in the last section; in Section 4, the exact solutions for the re-duced equation are obtained by using the power series method and the extended Tanh method; and in Section 5, a brief summary is done to the full text.
2. Lie Symmetry Analysis
We first do some preparatory work on the concept of classical Lie symmetry of general NLPDEs. Consider the kth-order scalar NLPDEs of the form
( ) ( )( )1, , , , 0, 1, 2, , ,kf x u u u mα α= = (2)
where ( )1 2, , , nx x x x= denotes n independent variables, ( )1 2, , , mu u u u= denotes m independent variables, and ( ) ( )
1 21, 2, , , 1, 2, ,
ji i i sju u j k i jα= = =
denote the partial derivatives of uα with respect to ( )1,2, ,ix i n= = up to jth-order, i.e.
( )1 2 j
j
ji i i
uux x x
αα ∂
=∂ ∂ ∂
.
Suppose that the one-parameter Lie group of point transformations
( ) ( ) ( )( ) ( ) ( )
2
2
, ; , ,
, ; , ,
ii
q
x X x u x x u O
u U x u u x u Oα
ε εξ ε
ε εη ε
∗
∗
= = + +
= = + + (3)

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2683 Journal of Applied Mathematics and Physics
where 1,2, ,i n= , 1, 2, ,q m= . ε is an infinitesimal parameter, ,i αξ η are some smooth function with variables ,x u .
Theorem 1. [10] (The Infinitesimal Invariant Formula for NLPDEs) If
i
i
Xx u
ααξ η∂ ∂
= +∂ ∂
(4)
is the infinitesimal generator of the one-parameter Lie group of transformations for (3), and the k-th prolongation of the infinitesimal generator is
( ) ( ) ( )1 2
1 2
1,
,k
k
kki i i i
i i i i
X Xu u
ααα αη η∂ ∂
= + + +∂ ∂
(5)
where the prolongation of the infinitesimals satisfy the following recurrence re-lation
( ) ( )1 , 1, 2, , ,ji i i jD D u i nα α αη η ξ= − =
( ) ( ) ( ) ( )1 2 11 2 1 2 1
1,, , , 1, 2, , 2
k k kk k
k k ji i i i i j li i i i i iD D u i k kα α αη η ξ
−−
−= − = ≥
where iD denotes the total derivative operator defined as
1 21 2
, 1, 2, , .j
j
i i ij i i ii j i i i
D u u u i nx u u u
α α α∂ ∂ ∂ ∂= + + + + + =∂ ∂ ∂ ∂
That one-parameter Lie group of transformations (3) is the Lie symmetry of Equation (2), if and only if
( )( ) ( )( )
( ) ( )( )11
, , , , 0, , , , 0.
k
kk
f x u u uX f x u u u
α
α
==
Next, we calculate the Lie symmetry of Equation (1). With regard to the infi-nitesimal generator of Equation (1), it can be expressed from (4) as the following form
.Xx t u v
ξ τ η φ∂ ∂ ∂ ∂= + + +
∂ ∂ ∂ ∂ (6)
Applying the Theorem 1 to Equation (1), we have
( ) ( )( ) ( )
( ) ( ) ( ) ( )
2
2
3 2
1 0, 02
31 0, 02
1 0,2
0.
t x t xx xx
t x t xx xx
t x xu v u v uv u u
t xx x u v u v uv u u
X u v u
X v uv u u
+ + = + + + =
+ + = + + + =
+ + = + + + =
(7)
By simplifying (7), we can get the following overdetermined equations about , , ,ξ τ η φ
0, 0, 0,0,2 2 0,
2 2 0, 0,2 2 2 2 0, 0.
u v x u v x t v
x t u u u
x x t t
t t v v
vv v
v v u v
ξ ξ τ τ τ η η ηφ φ φ η η φξ ξ φ τ τ φη η ξ ξ φ φ φ φ
= = = = = = = = = = = + − = + + = + + = + − − − = − − =
(8)
From (8) it is easy to caculate that the only solution of this system is
4 3 1 4 2 4 3 4 4, 2 , , 2 2 ,k x k t k k t k k u k k v kξ τ η φ= + + = + = − + = − − (9)

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2684 Journal of Applied Mathematics and Physics
where 1 2,k k and 3k are arbitrary constants. Accordingly, the symmetry groups of Equation (1) can be written as
( )1 2 3 4, , , 2 2 1 .X X X t X x t u vx t x u x t u v∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
= = = + = + − − +∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
(10)
The infinitesimal generators (10) correspond to a four-parameter Lie group of nontrivial point transformations acting on ( ), , ,x t u v -space.
3. Optimal System and Symmetry Reductions 3.1. Optimal System
In this section, we study how to construct the one-dimensional optimal system of Equation (1) in order to obtain more abundant group invariant solutions. The basic method of constructing it is to simplify the expression of Lie algebra by using a variety of adjoint transformations on the most general expression of Lie algebra. The adjoint transformation is expressed as the following series form
( )( )2 3
exp
, , , , , , ,2 3!
i j
j i j i i j i i i j
Ad X X
X X X X X X X X X X
ε
ε εε = − + − +
where ε is a parameter, and ,i jX X is the usual commutator, given by
, .i j i j j iX X X X X X = −
Hence we can get the following commutator Table 1 and the adjoint repre-sentation Table 2.
According to the method of constructing one dimensional optimal system in [11], we set up the following non-zero vector field with arbitrary coefficients
1 2 3, ,a a a and 4a , which is a Lie algebras made up of (10)
1 1 2 2 3 3 4 4 ,X a X a X a X a X= + + +
and simplify the coefficients of the vector as much as possible. Without loss of generality, suppose first that 4 0a ≠ and set up 4 1a = , then the vector X be-comes 1 1 2 2 3 3 4X a X a X a X X= + + + To eliminate the coefficient of 1X , we use
1X to act on X by means of the adjoint operation, i.e.
( )( )1 1 2 2 3 3 4exp ,X Ad X X a X a X Xε′ = = + +
where the group parameter 1 1aε = . Then continue to eliminate 2 3,X X by us-ing one after another 2 3,X X to act on X ′ , the vector becomes
( )( ) ( )( )3 3 2 2 4exp exp ,X Ad X Ad X X Xε ε′′ ′= =
where the group parameters 2 2 3 32,a aε ε= = − . It can be seen easily that the vector form can not be simplified much more. Secondly, suppose that
4 30, 0a a= ≠ and set up 3 1a = , the vector X becomes 1 1 2 2 3X a X a X X= + + . To eliminate the coefficient of the vector 1X we use 2X to act on X by means of the adjoint operation, i.e.
( )( )4 2 2 2 3exp ,X Ad X X a X Xε′′′ = = +

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2685 Journal of Applied Mathematics and Physics
Table 1. Commutator table.
,i jX X 1X 2X 3X 4X
1X 0 0 0 1X
2X 0 0 1X 22X
3X 0 1X− 0 3X−
4X 1X− 22X− 3X 0
Table 2. Adjoint representation table.
Ad 1X 2X 3X 4X
1X 1X 2X 3X 4 1X Xε−
2X 1X 2X 3 1X Xε− 4 22X Xε−
3X 1X 2 1X Xε+ 3X 4 3X Xε+
4X 1eX ε 22eX ε 3eX ε− 4X
where the group parameter 4 1aε = . Obviously, it can not continue to simplify by using adjoint operators. Thirdly, suppose that 4 3 20, 0, 0a a a= = ≠ and set up
2 1a = , the vector is already the simplest form as 1 1 2X a X X= + . Last suppose that 4 3 2 10, 0, 0, 0a a a a= = ≠ ≠ and set up 1 1a = , that can only be 1X X= .
To summarize, we state the result that the one-dimensional optimal system of symmetry groups (10) is
{ }1 2 3 4 1 2 2 3, , , , ,X X X X aX X aX X+ +
where a is arbitrary constant.
3.2. Symmetry Reductions
In the present section, we present all possible similarity reduction forms of Equa-tion (1), which is an indispensable step to solve the NLPDEs by the symmetry method.
For the symmetry 4X , the corresponding characteristic equation is
( )d d d d ,
2 2 1x t u vx t u v= = =
− − + (11)
hence we can get a similarity independent variable from (11) defined as 1 2xtς −= and group invariant solutions defined as
( ) ( ) ( ) ( )1 2 1, , , 1u x t t F v x t t Hς ς− −= = − + ,
which satisfy the following reduced equation
( )3
2 2 0,
2 2 2 2 0,
F F FF H
H HF H FH F
ς
ς
′ ′ ′+ − − =
′ ′ ′− + − − =
where d d,d dF HF Hς ς
′ ′= = .
For other symmetries in the optimal system, the reduction method is the same as 4X . The results are shown in Table 3.

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2686 Journal of Applied Mathematics and Physics
4. Explicit Solution of the Dispersive Long Wave Equation
In the third section, we obtain the one-dimensional optimal system of Equation (1), and give the reduction equation corresponding to each symmetry in the op-timal system in Table 3. The reduction equations corresponding to 1X and
3X can be easily solved by Mathematica, where the process is omitted. For oth-er symmetries in the optimal system, it is very difficult to get directly through the calculation software. In this connection, we will use two methods to solve the rest of reduction equations, namely, the power series method and the extended Tanh function method.
4.1. Explicit Power Series Solutions of the Reduction Equation (A)
The power series method is a useful approach to solve higher order ordinary differential equations. A large number of solutions for ordinary differential equ-ations can be constructed by utilizing the method.
Suppose that the power series solution is the following form
( ) ( )0 0
, ,n nn n
n nF c H sς ς ς ς
∞ ∞
= =
= =∑ ∑ (12)
where ,n nc s is undetermined coefficient. Substituting (12) into (A), we get
( )
( )
( )
( )
( )( )( )
0 11 1 1 0
0 1 1 11
0 1 0 11 1 0
1 0 11 1 0
3 31
2 1
2 2 1 2 0,
2 2 2 1 2
2 1 2
2 1 2 3 12 0.
nn n n
n n k n kn n n k
nn
nn
n nn k n k
n n kn
n nn k n k
n n k
nn
n
c c nc n k c c
c c n s s
s s n k s c s c
ns n k c s c s
n n n c c
ς ς ς
ς
ς ς
ς ς
ς
∞ ∞ ∞
+ −= = = =
∞
+=
∞ ∞
+ −= = =
∞ ∞
+ −= = =
∞
+=
+ + − + −
− − + − =
+ − + − −
+ − + − −
− + + + − =
∑ ∑ ∑∑
∑
∑ ∑∑
∑ ∑∑
∑
Through comparing the coefficients of ς, we can easily get the following results when 0n = ,
0 0 1 0 0 1 0 11 3
2, ,
2 6c c c s s c c s
s c− − −
= = (13)
when 1n ≥ ,
( ) ( ) ( )
( )( )( ) ( ) ( )
( )
1 10
3 10
10
1 1 2 1 ,2 1
1 2 2 12 1 2 3
2 1 .
n
n n k n kk
n
n n k n kk
n
k n kk
s n c n k c cn
c n s n k s cn n n
n k c s
+ + −=
+ + −=
+ −=
= + − + − +
= + − + −+ + +
− + −
∑
∑
∑
(14)
The sequence { } { }1 3,n ns c∞ ∞ can be uniquely determined by (13) and (14) and
depend on the other undetermined coefficients ( )0 , 0,1, 2is c i = . It is easy to

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2687 Journal of Applied Mathematics and Physics
Table 3. Reduction of the nonlinear long wave equation.
Infinitesimal generator
Similarity variables Reduction equation
1X ,tς =
( ) ( ) ( ) ( ), , , .u x t F v x t Hς ς= = 0,F ′′ = 0.H ′′ =
2X ,xς =
( ) ( ) ( ) ( ), , , .u x t F v x t Hς ς= = 0,FF H′ ′+ = ( )3 0.F HF FH F′ ′ ′+ + + = (D)
3X ,tς =
( ) ( ) ( ) ( ), , , .u x t x t F v x t Hς ς= + = 0,F Fς ′+ =
1 0.H Hς ′+ + =
4X 1 2 ,xtς −=
( ) ( ) ( ) ( )1 2 1, , , 1 .u x t t F v x t t Hς ς− −= = − +
2 2 0,F F FF Hς ′ ′ ′+ − − = ( )32 2 2 2 0.H HF H FH Fς′ ′ ′− + − − = (A)
1 2X X+ ,x tς = −
( ) ( ) ( ) ( ), , , .u x t F v x t Hς ς= = 0,F FF H′ ′ ′− + + =
( )3 0.F HF H FH F′ ′ ′ ′+ − + + = (B)
2 3X X+ 2 2 2,t xς = − +
( ) ( ) ( ) ( ), , , .u x t t F v x t Hς ς= + =
1 0,FF H′ ′+ + = ( )3 0.F HF FH F′ ′ ′+ + + = (C)
prove that the power series solution is convergent by references [13], so the re-duction Equation (A) has the following power series solution
( )
( )( )( ) ( )
( )
2 3 30 1 2 3 3
1
2 30 0 1 0 10 1 2
11 0
31
0
61 2 2 1
2 1 2 3
2 1 ,
nn
n
n
n n k n kn k
nn
k n kk
F c c c c c
s s c c sc c c
s ns n k s cn n n
n k c s
ς ς ς ς ς
ς ς ς
ς
∞+
+=
∞
+ −= =
++ −
=
= + + + +
− −= + + +
+ + − + −+ + +
− + −
∑
∑ ∑
∑
( )
( ) ( )
10 1 1
1
10 0 10 1
1 0
2 1 2 1 .2 2 1
nn
n
nn
n n k n kn k
H s s s
c c cs c nc n k c c
n
ς ς ς
ς ς
∞+
+=
∞+
+ −= =
= + +
− = + + + − + − +
∑
∑ ∑
And then we get the following power series solution of Equation (1)
( ) ( ) ( ) ( )
( )( )( ) ( )
( ) ( )
2 31 2 1 2 1 2 1 20 0 1 0 10 1 2
11 0
31 21
0
,6
1 2 2 12 1 2 3
2 1 ,
n
n n k n kn k
n n
k n kk
s s c c su x t t c c xt c xt xt
s ns n k s cn n n
n k c s xt
− − − −
∞
+ −= =
+−+ −
=
− −= + + ++ + − + −+ + +
− + −
∑ ∑
∑
( ) ( )1 1 20 0 10
2, 1
2c c c
v x t t s xt− −−= − + +
( ) ( ) ( ) ( ) 11 21
1 0
1 1 2 1 ,2 1
n n
n k n kn k
n c n k c c xtn
∞ +−+ −
= =
+ + − + − + ∑ ∑
where ( )0 , 0,1, 2ns c n = are arbitrary constant.

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2688 Journal of Applied Mathematics and Physics
4.2. Explicit Solutions of the Reduction Equation (B) Using Extended Tanh Function Method
The extended Tanh function method is a very effective method for solving some nonlinear evolution equations proposed in recent years [33]. The method is based on the Tanh function expansion method and using the general Riccati eq-uation as an auxiliary equation. It can transform the solution of complex equa-tions into the solution of nonlinear algebraic equations by traveling wave trans-formation. Next we use this method to find the traveling wave solutions of the reduction Equation (B) in Table 3.
Suppose that the solution of the reduction Equation (B) can be expressed as the form
( ) ( ) ( )( )
( ) ( ) ( )( )
01
01
,
,
mi i
i ii
nj j
j jj
F a a A
H b b B
ς φ ς φ ς
ς φ ς φ ς
−
=
−
=
= + + = + +
∑
∑ (15)
where ( ) ( )0 0, , , 1, , , , 0,1, ,i i j ja b a A i m b B j n= = are undetermined con-stants, and function ( )φ φ ς= satisfies
2 ,φ λ ρφ ωφ′ = + + (16)
where , ,λ ρ ω are arbitrary constant. By solving Equation (16), we can know that the solution of function φ can be divided into 4 categories, and amount to 27 solutions [22].
1) when 2 4 0ρ λω− > and 0ρω ≠ (or 0λω ≠ ),
11 tanh ,
2 2θφ ρ θ ς
ω
= − +
( )( )21 tanh sech ,
2iφ ρ θ θς θς
ω = − + ±
31 coth ,
2 2θφ ρ θ ς
ω
= − +
( )( )41 coth csch ,
2iφ ρ θ θς θς
ω = − + ±
51 2 tanh coth ,
4 4 4θ θφ ρ θ ς ς
ω
= − + +
( )( )2 2
6
cosh1 ,2 sinh
B A A
A B
θ θ θςφ ρ
ω θς
− − = − + +
( )( )2 2
7
sinh1 ,2 cosh
B A A
A B
θ θ θςφ ρ
ω θς
− + = − + +
where ,A B are two nonzero constants, and satisfy 2 2 0B A− > .

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2689 Journal of Applied Mathematics and Physics
8
2 cosh 2,
sinh 2 cosh 2
λ θςφ
θ θς ρ θς
=
−
9
2 sinh 2,
sinh 2 cosh 2
λ θςφ
ρ θς θ θς
− = −
10
2 cosh,
sinh cosh i
λ θςφ
θ θς ρ θς θ
=
− ±
11
2 sinh,
sinh cosh
λ θςφ
ρ θς θ θς θ
=
− + ±
12 2
4 sinh 4 cosh 4.
2 sinh 4 cosh 4 2 cosh 4
λ θς θςφ
ρ θς θς θ θς θ
=
− + −
2) when 2 4 0ρ λω− < and 0ρω ≠ (or 0λω ≠ ),
131 tan ,
2 2θφ ρ θ ς
ω
−= − + −
( )141 tan sec ,
2φ ρ θ θς θς
ω = − + − − ± −
151 cot ,
2 2θφ ρ θ ς
ω
−= − + −
( )( )161 cot csc ,
2φ ρ θ θς θς
ω = − + − − ± −
171 2 tan cot ,
4 4 4θ θφ ρ θ ς ς
ω
− −= − + − −
( )( )2 2
18
cos1 ,2 sinh
A B A
A B
θ θ θςφ ρ
ω θς
± − − − − − = − + − +
( )( )2 2
19
sinh1 ,2 cosh
A B A
A B
θ θ θςφ ρ
ω θς
− − + − − = − + − +
where ,A B are two nonzero constants, and satisfy 2 2 0A B− > .
20
2 cos 2,
sin 2 cos 2
λ θςφ
θ θς ρ θς
− = − − + −
21
2 sin 2,
sin 2 cos 2
λ θςφ
ρ θς θ θς
− − = − − − − −
22
2 cos,
sin cos
λ θςφ
θ θς ρ θς θ
− = − − + − ± −

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2690 Journal of Applied Mathematics and Physics
23
2 sin,
sin cosh
λ θςφ
ρ θς θ θς θ
− = − − + − − ± −
24 2
4 sin 4 cos 4.
2 sin 4 cos 4 2 cos 4
λ θς θςφ
ρ θς θς θ θς θ
− − = − − − + − − − −
Above formula 1 24φ φ , the symbol θ is expressed as 2 4θ ρ λω= − . 3) when 0λ = and 0ρω ≠ ,
[ ] [ ]( )25 ,cosh sinh
bb
ρφω ρς ρς
−=
+ −
[ ] [ ]( )[ ] [ ]( )26
cosh sinh,
cosh sinhbρ ρς ρς
φω ρς ρς
+= −
+ −
where b is a arbitrary constant. 4) when 0ω ≠ and 0λ ρ= = ,
271 ,
cφ
ως=
+
where c is a arbitrary constant, and x tς = − . Considering the homogeneous equilibrium between the highest order linear
term and the nonlinear term in the reduction Equation (B), we can obtain 1, 2m n= = . As a result, the trial Equations (16) reduces to
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
10 1
2 1 20 1 2 2
,
.
AF a a
B BH b b b
ς φ ςφ ς
ς φ ς φ ςφ ς φ ς
= + + = + + + +
(17)
In order to determine the values of undetermined coefficients 0 1 0 1 2, , , ,a a b b b , substituting (16) and (17) into the reduction Equation (B) and merging the po-lynomial of the same power of φ , and setting up each polynomial coefficient to zero, we can get the following nonlinear algebraic equations
0 2 31 2 1 1 2
1 21 0 1 1 1 2
21 1 1 2 0 2 1 2
2 21 0 1 1 1 2
2 21 1 1 1 0 1 0 1
1 1 2 0 2 1 2 1
: 2 0, 6 3 0
: 2 0,
12 2 2 2 3 0: 2 0,
7 8 2 2 2 3
A B A A BA a A A B B
A A B B a B A BA a A A B B
A A A A b B a BA B B a B a B A
φ λ λ λ λ
φ λ λ ρ λ ρ
λ ρ λ λ λ ρφ ρ ρ ω ρ ω
λ λρ λ ω λ λ λρ ρ ρ λ ω
− − = − − =
− − − − − =
− − + − − =
− − − − =
− − − − + −
− + − − − 2
6 21 2
2 21 1 1 1 0 1 0 1 1 1
2 0 2 1 2 1 27 2
1 1 1 2 0 2 1 28 3
1
0
: 2 0,
7 8 2 2 2 3 0
: 0 0,12 2 2 2 3 0: 0 0,6
B
a ba a a a b b a b a b
b a b a b A ba a b b a b a b
a
φ ω ω
ω ρ ω λω ω ω ω ρρ ρ λ ω
φ ρω ω ω ω ρφ ω
=
+ =
+ + + − + +
− + + + =
= + − + + == +
1 23 0a bω
=

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2691 Journal of Applied Mathematics and Physics
By solving the above system with the help of Mathematic, we can get the fol-lowing results
0 1 12 2
0 1 2 1 2
1 , 2 , 2 ,
1, 2 , 2 , 2 , 2 .
a a A
b b b B B
ρ ω λ
ρω ω λρ λ
= ± = ± = ±
= − = − = − = − = − (18)
Now, substituting (18) into (19), we obtain explicit solutions of Equation (1) as follow.
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )2
2 22
2, 1 2 ,
2 2, 1 2 2 ,
k kk
k k kk k
u x t
v x t
λρ ωφ ςφ ς
λρ λρωφ ς ω φ ςφ ς φ ς
= ± ± ± = − − − − −
(19)
where 1,2, , 27,k x tς= = − , and selecting any hyperbolic function in 1 27φ φ , for example,
( ) 1 tan .2 2
θφ ς ρ θ ςω
−= − + −
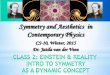
The explicit solutions (19) become as
( )
( )2 2 2
22
4, 1 tan ,2
tan2
1 8, 1 tan2 2 2
tan2
4 ,tan
2
u x t
v x t
θς λωθθςρ θ
ρ θς λ ωθθςρ θ
λρωθςρ θ
−= ± −
− − −
− = − + + − −
− + − − −
− + −
where 2, 4 0x tς θ ρ λω= − = − < (see Figure 1).
4.3. Explicit Power Series Solutions of the Reduction Equation (C)
In this section, we study the power series solution of the reduction Equation (C)
Figure 1. Plot of explicit solution above with 4, 0.2, 0.3λ ρ ω= = − = .

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2692 Journal of Applied Mathematics and Physics
in the form of (12). Substituting (12) into the reduction Equation (C), we get
( ) ( )
( ) ( )
( )
( )( )( )
1 0 1 1 11 0 1
1 1 11 1 0
0 1 1 0 11 0
3 31
1 1 1 0,
1 1
1
1 2 3 6 0.
nn n
k n k nn k n
nn n
n k n kn n k
nn
k n kn k
nn
n
n k c c c c n s s
n c c n k s c
s c n k c s c s
n n n c c
ς ς
ς ς
ς
ς
∞ ∞
+ − += = =
∞ ∞
+ + −= = =
∞
+ −= =
∞
+=
+ + − + + + + =
+ + + + − + + + − + + + + + + =
∑∑ ∑
∑ ∑∑
∑∑
∑
Through comparing the coefficients of ς , we can easily get the following re-sults. where 0n = ,
1 0 1 0 11 0 1 31 , ,
6c s c c s
s c c c+ +
= − − = −
where 1n ≥ ,
( ) ( )
( )( )( ) ( ) ( )
( )
1 10
3 1 10
10
1 1 ,1
1 1 11 2 3
1 .
n
n k n kk
n
n n k n kk
n
k n kk
s n k c cn
c n c n k s cn n n
n k c s
+ + −=
+ + + −=
+ −=
= − + −+
= − + + + −+ + +
+ + −
∑
∑
∑
Accordingly, the power series solution of the reduction Equation (C) is as fol-lows
( )
( )( )( ) ( ) ( )
( )
( ) ( ) ( ) ( )
2 31 0 1 0 10 1 2
1 11 0
31
0
10 0 1 1
1 0
61 1 1
1 2 3
1 ,
11 1 .1
n
n k n kn k
nn
k n kk
nn
k n kn k
c s c c sF c c c
n c n k s cn n n
n k c s
H s c c n k c cn
ς ς ς ς
ς
ς ς ς
∞
+ + −= =
++ −
=
∞+
+ −= =
+ += + + −
− + + + −+ + +
+ + −
= − + − + −+
∑ ∑
∑
∑∑
And then we get the following power series solution of Equation (1)
( )
( )( )( ) ( ) ( )
( )
22 2
0 1 2
321 0 1 0 1
1 11 0
32
10
2 2,2 2
26 2
1 1 11 2 3
21 , 2
n
n k n kn k
nn
k n kk
t x t xu x t t c c c
c s c c s t x
n c n k s cn n n
t xn k c s
∞
+ + −= =
+
+ −=
− + − += + + +
+ + − +−
− + + + −+ + +
− ++ + −
∑ ∑
∑

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2693 Journal of Applied Mathematics and Physics
( ) ( )
( ) ( )
2
0 0 1
12
11 0
2, 12
1 21 .1 2
nn
k n kn k
t xv x t s c c
t xn k c cn
+∞
+ −= =
− += − +
− +− + − +
∑∑
4.4. Explicit Solutions of the Reduction Equation (D) Using Extended Tanh Function Method
Using extended tanh function method, similar to the solving of the reduction Equation (B), we obtain the following results:
0 1 1 0 12 2
2 1 2
, 2 , 2 , 1, 2 ,
2 , 2 , 2 .
a a A b b
b B B
ρ ω λ ρω
ω λρ λ
= ± = ± = ± = − = −
= − = − = −
and selecting the following hyperbolic function
1 coth2 2
θφ ρ θ ςω
= − +
We obtain explicit solutions of the Equation (1.1) as follow
( )
( )2 2 2
22
4, coth ,2
coth2
1 8, 1 coth2 2 2
coth2
4 ,coth
2
u x t
v x t
θς λωθθςρ θ
ρ θς λ ωθθςρ θ
λρωθςρ θ
=
−
= − + − −
− + +
+
where 2, 4 0x tς θ ρ λω= − = − < (see Figure 2).
Figure 2. Plot of explicit solution above with 4, 2, 0.2λ ρ ω= = = .

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2694 Journal of Applied Mathematics and Physics
5. Conclusion
In the field of physics and engineering mechanics, it is particularly important to solve nonlinear differential equations. In the work, the Lie group analysis me-thod has been employed to investigate the dispersive long wave equations. Based on this method, the vector fields and symmetry reductions have been obtained for the system. Since it is difficult to solve the reduction equations directly, the power series method and the extended Tanh function method have been used to construct more explicit solutions, which can enrich the exact solutions of the dispersive long wave equations. The basic idea is efficient and powerful in solv-ing wide classes of nonlinear differential equations.
Acknowledgements
The authors would like to express their thanks to the unknown referees for their careful reading and helpful comments. Project supported by the Natural Science Foundation of Inner Mongolia, China (Grant No. 2016MS0116).
Conflicts of Interest
The authors declare no conflicts of interest regarding the publication of this pa-per.
References [1] Marin, M. (1997) On Weak Solutions in Elasticity of Dipolar Bodies with Voids.
Journal of Computational and Applied Mathematics, 82, 291-297. https://doi.org/10.1016/S0377-0427(97)00047-2
[2] Adomian, G. (1998) A Review of the Decomposition Method in Applied Mathe-matics. Journal of Computational and Applied Mathematics, 135, 501-544.
[3] Fan, E.G. (2003) Uniformly Constructing a Series of Explicit Exact Solutions to Nonlinear Equations in Mathematical Physics. Chaos, Solitons & Fractals, 16, 819-839. https://doi.org/10.1016/S0960-0779(02)00472-1
[4] Broadbridge, P., Moitsheki, R.J. and Edwards, M.P. (2002) Analytical Solutions for Two Dimensional Solute Transport with Velocity-Dependent Dispersion. Envi-ronmental Mechanics, 129, 145-153. https://doi.org/10.1029/129GM14
[5] Abdul-Majid, W. and Alice, G. (2004) An Analytic Study of Fishers Equation by using Adomian Decomposition Method. Applied Mathematics and Computation, 154,609-620. https://doi.org/10.1016/S0096-3003(03)00738-0
[6] Rogers, C. and Schief, W.K. (2002) Backlund and Darboux Transformations Geo-metry and Modern Applications in Soliton Theory. Cambridge University Press, Cambridge. https://doi.org/10.1017/CBO9780511606359
[7] Hirota, R. (2004) Direct Methods in Soliton Theory. Springer, Berlin. https://doi.org/10.1017/CBO9780511543043
[8] Ma, W.X. and Fan, E.G. (2011) Linear Superposition Principle Applying to Hirota Bilinear Equations Computers and Mathematics with Applications, 61, 950-959. https://doi.org/10.1016/j.camwa.2010.12.043
[9] Ma, W.X. (2015) Lump Solutions to the Kadomtsev-Petviashvili Equation. Physics Letters A, 379, 1975-1978. https://doi.org/10.1016/j.physleta.2015.06.061

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2695 Journal of Applied Mathematics and Physics
[10] Olver, P.J. (1986) Applications of Lie Groups to Differential Equations. Springer, New York. https://doi.org/10.1007/978-1-4684-0274-2
[11] Bluman, G.W. and Kumei, S. (1989) Symmetries and Differential Equations. Sprin-ger, Berlin. https://doi.org/10.1007/978-1-4757-4307-4
[12] Khalique, C.M. and Adem, K.R. (2011) Exact Solutions of the (2+1)-Dimensional Zakharov-Kuznetsov Modified Equal Width Equation Using Lie Group Analysis. Mathematical and Computer Modelling, 54, 184-189. https://doi.org/10.1016/j.mcm.2011.01.049
[13] Liu, H. and Li, J. (2009) Lie Symmetry Analysis and Exact Solutions for the Short Pulse Equation. Nonlinear Analysis: Theory, Methods Applications, 71, 2126-2133. https://doi.org/10.1016/j.na.2009.01.075
[14] Rosa, M., Bruzon, M.S. and Gandarias, M.L. (2015) Symmetry Analysis and Exact Solutions for a Generalized Fisher Equation in Cylindrical Coordinates. Communi-cations in Nonlinear Science and Numerical Simulation, 25, 74-83. https://doi.org/10.1016/j.cnsns.2015.01.010
[15] Cantwell, B.J. (2002) Introduction to Symmetry Analysis. Cambridge University Press, Cambridge.
[16] Moussa, M.H.M. and Shikh, R.M.E. (2006) Similarity Reduction and Similarity So-lutions of Zabolotskay-Khoklov Equation with Dissipative Term via Symmetry Me-thod. Physica A: Statistical Mechanics and Its Applications, 371, 325-335. https://doi.org/10.1016/j.physa.2006.04.044
[17] Lukashchuk, S.Y. and Saburova, R.D. (2018) Approximate Symmetry Group Classi-fication for A Nonlinear Fractional Filtration Equation of Diffusion-Wave Type. Nonlinear Dynamics, 93, 295-305. https://doi.org/10.1007/s11071-018-4192-3
[18] Liu, Y.K. and Li, B. (2016) Nonlocal Symmetry and Exact Solutions of the (2+1) dimensional Gardner Equation. Chinese Journal of Physics, 54, 718-723. https://doi.org/10.1016/j.cjph.2016.05.014
[19] Qin, C.Y., Tian, S.F., Wang, X.B., Zou, L. and Zhang, T.T. (2018) Lie Symmetry Analysis, Conservation Laws and Analytic Solutions of the Time Fractional Kol-mogorov-Petrovskii-Piskunov Equation. Chinese Journal of Physics, 56, 1734-1742. https://doi.org/10.1016/j.cjph.2018.05.002
[20] Bruzon, M.S. and Gandarias, M.L. (2011) Classical and Nonclassical Symmetries for the Krichever Novikov Equation. Theoretical and Mathematical Physics, 168, 875-885. https://doi.org/10.1007/s11232-011-0071-5
[21] Kudryashov, N.A. (2005) Simplest Equation Method to Look for Exact Solutions of Nonlinear Differential Equation. Chaos, Solitons & Fractals, 24, 1217-1231. https://doi.org/10.1016/j.chaos.2004.09.109
[22] Xie, F.D., Chen, J. and Lu, Z.S. (2005) Using Symbolic Computation to Exactly Solve the Integrable Broer-Kaup Equations in (2+1)-Dimensional Space. Commu-nications in Theoretical Physics, 43, 585-590. https://doi.org/10.1088/0253-6102/43/4/003
[23] He, J.H. (2011) Homotopy Perturbation Method for Bifurcation of Nonlinear Prob-lems. International Journal of Nonlinear Sciences and Numerical Simulation, 6, 207-208.
[24] Barrio, R. (2005) Performance of the Taylor Series Method for ODEs/DAEs. Ap-plied Mathematics and Computation, 163, 525-545. https://doi.org/10.1016/j.amc.2004.02.015
[25] Yu, J.L., Li, F.Z. and She, L.B. (2017) Lie Symmetry Reductions and Exact Solutions

X. M. Xue, Y. S. Bai
DOI: 10.4236/jamp.2018.612222 2696 Journal of Applied Mathematics and Physics
of a Multidimensional Double Dispersion Equation. Applied Mathematics, 8, 712-723. https://doi.org/10.4236/am.2017.85056
[26] Feng, L.L., Tian S.F., Zhang, T.T. and Zhou, J. (2017) Lie Symmetries, Conservation Laws and Analytical Solutions for Two-Component Integrable Equations. Chinese Journal of Physics, 55, 996-1010. https://doi.org/10.1016/j.cjph.2017.03.008
[27] Baleanua, D., Incc, M., Yusuf, A. and Aliyuc, A.I. (2018) Lie Symmetry Analysis, Exact Solutions and Conservation Laws for the Time Fractional Caud-rey-Dodd-Gibbon-Sawada-Kotera Equation. Communications in Nonlinear Science and Numerical Simulation, 59, 222-223. https://doi.org/10.1016/j.cnsns.2017.11.015
[28] Broer, L.J.F. (1975) Approximate Equations for Long Water Waves. Applied Scien-tific Research, 31, 377-395. https://doi.org/10.1007/BF00418048
[29] Kupershmidt, B.A. (1985) Mathematics of Dispersive Water Waves. Communica-tions in Mathematical Physics, 99, 51-73. https://doi.org/10.1007/BF01466593
[30] Boiti, M., Leon, J.J.P. and Pempinelli, F. (1987) Spectral Transform for a Two Spa-tial Dimension Extension of the Dispersive Long Wave Equation. Inverse Problems, 3, 371-387. https://doi.org/10.1088/0266-5611/3/3/007
[31] Eckhaus, W. (1985) Department of Mathematics. University of Utrecht, Utrecht.
[32] Zhang, J.F., Guo, G.P. and Wu, F.M. (2002) New Multi-Soliton Solutions and Tra-velling Wave Solutions of the Dispersive Long-Wave Equations. Chinese Physics, 11, 533-536. https://doi.org/10.1088/1009-1963/11/6/303
[33] Zayed, E.M.E. and Alurrfi, K.A.E. (2013) The Modified Extended Tanh Function Method and Its Applications to the Generalized KdV-mKdV Equation with Any-Order Nonlinear Terms. International Journal of Environmental Engineering Science and Technology Research, 1, 165-170.