-
Computing constraint Jacobians
Claude Lacoursie`reHPC2N/UMIT
andDepartment of Computing Science
Umea UniversitySE-901 87, Umea, [email protected]
December 1, 2011
1 Introduction
These notes should explain more about how to compute Jacobians
for simulating simplemultibody systems which are only subject to
distance and contact constraints.
2 Whats a Jacobian?
Properly speaking, a Jacobian is a gradient and for a given
scalar function g(x) of areal vector x Rn, thats defined as the row
vector
g
x= g = G =
[gx1
gx2
. . . , gxn
]. (1)
In my convention here, lower case letters are either scalars or
vectors, and upper caseletters refer to matrices. I will use g(x)
for any function, but in particular, the functionsthat define
constraints when g(x) = 0.
Consider the simple example where g(x) = x, i.e., the norm of
the vector x whichcan also be written as
xTx =
x x, where xT is the transpose of vector x. I write
the dot-product of two vectors of compatible dimensions as
either xT y or x y. Theconvention here is that vectors are always
column vectors, and so xT is a row vector.Using standard
matrix-matrix multiplication rules, xTx =
ni=1 x
2i , and this is a scalar
as it should.
1
-
Now, think of x as a scalar and now, by chain rule, we have
dx2
dx=
1
2x2
dx2
dx=
xx2. (2)
Were almost there. Now, consider that x is an n-dimensional
vector and use the chainrule again so that
g = x = xTx =
1
2xTx
(xTx)
=1xTx
xT =1
xxT .
(3)
This is just the transpose of the unit vector pointing in the
direction of x. The reasonto keep the fractions in front is to
separate the vectors and the scalars. The transposehas to be there
because of the convention for g being a row vector.
Now, if the function g(x) is also a vector of m-dimensions,
meaning that
g(x) =
g1(x)g2(x)
...gm(x)
(4)we can still compute gi for each components. Since that gives
us a row vector, thecomplete Jacobian g = G is now an m n matrix,
namely
g = G =
g1x1
g1x2
g1xng2x1
g2x2
g2xn...
.... . .
...gmx1
gmx2
gmxn .
(5)That looks daunting at first but its going to be very simple.
Recall that in our cases,the function g(x) is a constraint, and
that usually involves only two bodies. So, if x isthe vector of
coordinates of the entire system, well have gi/xj = 0 unless j is
thecoordinate of one body constrained by gi.
Also, dont worry too much about matrices and storage, since you
only need thenonzero components. In the case of particles or rigid
body constraints, youll need 2msmall matrices to store a Jacobian
and you can put that in your data structure for aconstraint, or
keep pointers to a storage area if you like. Thats what we do in
theAgX code to keep everything nice and tight, i.e., we use structs
of arrays instead ofarrays of structs.
3 Point particles
First consider a particle at position x and the constraint g(x)
= x l. Thats asimple pendulum hooked to the origin by a string of
length l. The Jacobian for that
2
-
x(1)
x(2)
x(1) x(2)
G(1)
G(2)
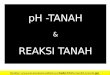
Figure 1: A distance constraint between two particles. The
Jacobians here are simplynormals aligned along the center line
between the particles. What else couldit be!
is given by Eqn. (3). As the Jacobian points in the direction of
fastest increase, wecan move along (1/x)xT to move radially toward
the origin. If you remember thedefinition of a constraint force as
GT, you can guess that < 0 is the force neededto keep the
particle from flying away.
Now consider two particles x (1), x (2) and the length
constraint g(x) = x (1) x (2)l = 0, where l is a constant. Here, I
am writing x as the set of generalized coordinatesso that
x =
[x (1)
x (2)
]=
x(1)1
x(1)2
x(1)3
x(2)1
x(2)2
x(2)3
(6)
where x(1)j , j = 1, 2, 3 are the coordinates of the first
particle, and same for the second.
For the case of particles, we have three dimensions for
positions and three dimensionsfor velocities. Youll see later that
this does not work exactly the same way for rigidbodies because of
the quaternion representation of the rotations. But dont worry
yet.
So, going back to the definition in Eqn. (1), we need to get all
partial derivatives ofg(x) with respect to all coordinates. But you
might already guess that there is a lot ofsymmetry between whats
going on with x (1) and x (2). To make the chain rule clear
3
-
and easy to use here, write r = x (1) x (2). Thats just a 3D
vector now and we canget the partials easily
r
x (1)=x (1) x (2)
x (1)= I
r
x (2)=x (1) x (2)
x (2)= I
(7)
where I is the 3 3 identity matrix. Recall now that r is a 3D
vector so thatr/x (i), i = 1, 2 must be a 3 3 matrix as shown
already. So now, using the chainrule, we have
g
x (1)=
1
2rrT r
x (1)=
1
rrT r
x (1)
=1
rrT I =
1
rrT .
(8)
Clearly, for particle 2, we get the opposite sign
g
x (1)= 1rr
T . (9)
Recall now that the gradient of a function is the direction of
fastest increase and clearlynow, this shows that moving the
particles in the central direction 1/rr changesthe distance as fast
as possible. Which is obvious.
What happens if we have a long chain of n particles each linked
to its neighbor witha distance constraint? That gives us m = n 1
constraint equations and so we needto compute the beast of a matrix
described in Eqn. (5). If you look at that matrix,the particles
identify the columns, and the constraints are on the rows. Lets
label theconstraints from 1 to n 1 so that constraint gi is the one
that keeps particles x (i)and x (i+1) at the given distance lii. So
now, for a given constraint gi(x), we will havegi/x
(j) = 0 unless j = i or j = i1. Given what was computed for the
two particlecase, well then have
gix (i)
=1
ri,i+1 (x(i) x (i+1)) = 1rii+1ri,i+1, where ri,j = rij = x
(i) x (j). (10)
I use a coma in ri,i+1 to avoid confusion but rij in general.
Similarly,
gix (i+1)
= 1ri,i+1ri,i+1. (11)
Lets introduce the unit vectors uij = (1/rij)rij and so when you
put all theseconstraints together in a matrix form, you have
G =
u12 u12 0 0 . . . 00 u23 u23 0 . . . 00 0 u34 u34 . . . 0...
.... . .
. . ....
...0 0 0 un2,n1 un1,n 00 0 0 0 un1,n un1,n
. (12)
4
-
And thats very, very sparse.This is all there is to distance
constraints and as it turns out, except for a small
issue regarding quaternions, thats the same for rigid
bodies.
4 Rigid body constraints
For rigid bodies, the generalized coordinates are labeled q
because they are not onlyCartesian, but contain also the rotational
degrees of freedom. Though there are onlythree of these, and though
the angular velocity is a simple 3D vector, the rotationof the body
is best represented as a quaternion. Well, lets write the velocity
vector ofa rigid body with coordinate x as
v =
[x
]. (13)
Thats not the same as q because if we use the position x and the
quaternion e asgeneralized coordinates, thats a 7 dimensional
vector. What happened? Well, thevelocity of the quaternion is given
by the well known formula
e =1
2 ? e, (14)
where is here a pure imaginary quaternion. I did not change the
letter for it becausethere is a straight forward way to promote 3D
vectors to quaternions. If we separatequaternions in terms of real
(scalar) and imaginary components (a 3D vector), we canwrite
e =
[esev
](15)
and so for the 3D vector , or any other vector for that matter,
we have
=
[0
](16)
with a flagrant abuse of notation. The quaternion product in
Eqn. (14) can be writtenin matrix form
e =1
2 ? e =
1
2GT (e)
G(e) = [ev esI3 ev] , (17)and the convention used there is that
the cross product of two 3D vectors x y canbe represented as
x y = xy = 0 x3 x2x3 0 x1x2 x1 0
y1y2y3
. (18)If you look at Eqn. (17), you can now see that it is
possible to write
q = K(q)v, (19)
5
-
A contact constraint between two bodies
A distance constraint between two bodies
x(1)
x(2)
r(12) l0 = 0
p(1)
p(2)
A ball joint constraint between two bodies
x(1)
x(2)
r(12) = 0
p(1)p(2)
x(1)p(1)
x(2)
p(2)
n(1)
n(2)
Figure 2: Various constraints between two rigid bodies which all
rely on the same basicBall Joint Jacobian. Note that normals at
contacts are not unambiguouslydefined.
6
-
where v only contains x and , and K(q)) is a configuration
dependent matrix thatdepends on the quaternions of your system of
rigid bodies. Annoying as it may seem,that turns out to be a minor
problem only.
Now, generally, if you have a constant angular velocity and want
to integrate thedifferential equation in Eqn. (14) from t = 0 to t
= h, you get the result
e(h) = exp(h
2)e(0), (20)
and the exponential of a pure imaginary quaternion is itself a
quaternion, thoughnot pure imaginary, and it is defined as
exp(h
2) =
[cos(h2 )sin(h2 ) .
](21)
So when you integrate your multibody system, you can do all your
computations for thevelocity v as defined in Eqn. (13), and then
update your quaternions as in Eqn. (21),which will keep unit
quaternions as you integrate along. Good quaternion librarieswill
generate a quaternion which produces a rotation of (h/2) in the
direction of without you having to do much calculation, and you can
then just do a quaternionproduct to update.
People use different formulae for the update but thats probably
the simplest one tocode and understand, though not the most clever
or mathematically elegant. But itsfar better than doing
ek+1 ek + h2GT (ek)k+1
ek+1 1ek+1 ek+1DONT DO THIS!
(22)
Whats the point of all this? Well, remember the stepping formula
for constrainedsystems [
M GTG T
] [vk+1
]=
[Mvk + hfkhgk + Gvk
]qk+1 = qk + hvk+1
, (23)
where is some parameter, and T is a block diagonal positive
definite matrix. Spookis only one specific choice of these two.
Except for the last line, everything can bedone using only the
velocities. But now you know how to get your new rigid
bodyconfiguration including the quaternions given velocities, so
all you need to change isthe last line in Eqn. (23).
But something else slipped in here. When we assume that q = v,
we have
g(qk+1) = g(qk + hvk+1) = g(qk) + hg
qvk+1. (24)
7
-
But thats not the case anymore. Instead, we need to look back at
the definition
g(q) =g
qq =
g
qK(q)v, (25)
and thats the formula we want. Again, by abuse of notation, for
the case of rigidbodies we still write
g = Gv (26)
and we call G the Jacobian. For this case, this is no longer
just the gradient of g buta linear mapping between the velocity
space of the rigid bodies and the constraintsthemselves.
What we want to do now is to avoid completely the computation of
quaternionderivatives to get our precious Jacobian. How can that
ever work? Consider a simplecase now of a body fixed vector p which
has world coordinates p = R(e)p, and R(e) isthe orthogonal
transform matrix that maps body-fixed vectors to world
coordinates.The thing to remember here is that
dR
dt= R = wR, (27)
and since were assuming that p is constant, then
p = (R)p+R( p)
= (R)p+R 0 = p= p = p = p.
(28)
So, for instance, if the constraint was g(q) = x+ p where x is
the center of mass of abody, this would pin the point p on the body
at the origin. The Jacobian of that cannow be computed easily from
Eqn. (26) since
g = x p = [I p] [x
], and so
G = G (BJ) =[I p] . (29)
I call that the ball-joint constraint for the good reason that
if g(q) = 0, we have locked3 degrees of freedom on the body and
thats really just that: a ball joint. Had we usedEuler angles to
define our body kinematics, this ball joint would suffer gimbal
lockfor some rotation, and thats just annoying, and unnecessary.
The Jacobian G (BJ) inEqn. (29) never goes bad, i.e., it is never
row-rank deficient because the first blockis the identity
matrix.
We almost there for defining contact constraints. Consider two
bodies and pointsp (1), p (2) fixed on them. The same superscript
convention is used for velocities andcoordinates. Now, introduce
the vector
r = x (1) + p (1) x (2) p (2) (30)
8
-
which goes from point p (1) to p (2) in world frame. The full
Jacobian for this now,considering both bodies, is just as easy to
derive, namely
r =[I p (1) I +p (2)]
x (1)
(1)
x (2)
(2)
. (31)So, lets now constrain the distance with g(q) = r l. Thats
almost too easy bynow
g = r = 1rrT r
1
rrTG (BJ)v.
(32)
Ive abused notation again by writing G (BJ) for the Jacobian of
the ball joint involvingtwo bodies, and removed all indices on v
and r.
Lets assume now that we have a contact and maybe some
penetration so that r 0.Now, someone needs to give us a normal
vector n along which to separate, since r = 0,which means that it
may or may not be difficult to normalize. What wed like is thatthe
velocities separate at least so we want
nTG (BJ)v = G (contact)v 0. (33)
But what about tangential directions and frictional contact
forces? Thats easy too.Consider s, t as two orthogonal vectors, and
orthogonal to n as well. This is yet morenotational abuse because I
already used t for time and n for the number of bodies, butdont
worry. The point here is that we want to restrict the relative
motion r alongboth direction so we want in fact tT r = sT r = 0 if
we have stiction mode. You canjust replace n in Eqn. (33) to get
what you need.
That leaves the annoying issue of the mass matrices because when
you do Gauss-Seidel iterations, you basically work with the Schur
complement matrix GM1GT +T .For rigid bodies, contrary to
particles, this matrix is not just a multiple of the
identity.Instead, for a single rigid body, we have
M =
[mI 00 J
]=
[mI 00 RJ0RT
](34)
where J0 is the inertia tensor in body frame, which is
represented as a symmetric,positive definite 3 3 matrix, and R is
the rotation matrix of the rigid bodies. Thematrix I in the
north-west corner is the 3 3 identity matrix. So this is now a 6
6block matrix which needs to be updated at each step. The fact is
though that forspheres and boxes, the inertia tensor is a multiple
of the identity which is to say thatJ = J0 = I, where > 0 is a
scalar. Thats not true for cylinders or long boxesor other shapes.
But dont worry about this too much. In fact, if you do use such
9
-
big shapes, something will go very wrong with your simulations
because you need toinclude gyroscopic forces.
If you think of continuous time and go back to Newton-Eulers
laws of motion, youcan write the angular momentum L = M and then,
the second law reads
dL
dt= L+M = , (35)
where is an external force. This is derived exactly in the same
way as I did inEqn. (28), except that now, L = M is not constant in
body frame. In principle,you could add this with other forces on
the RHS in Eqn. (23) but that wont work.Do this and you can watch
your bodies cram up on the north pole of the Riemannsphere, that is
to say, all go to occupy infinity. The reason is complicated. You
willfind all sorts of hacks for this if you read the recommended
text or the SIGGRAPHproceedings. Some people say you can just
integrate the angular momentum L directlywith Lk+1 = Lk + h and
then recover k+1 from that, along with a rotation matrix.Thats
fallacy. The fixes are complicated to derive and not entirely
trivial to implement.So you are better off leaving them out. Still,
I will use the J in what follows withoutassuming that it is just a
scalar multiple of the identity.
Lets get to work now, and go back to our ball and socket
Jacobian. What we wanthere is GM1GT for one body first, so we just
do it. First let me write G (BJ) = G tosimplify the rest, and note
that pT = p so now
GM1GT =[I p] [m1I 0
0 J1] [Ip
]=[I p] [m1IJ1p
]= m1I pJ1p.
(36)
The last bit looks bad in general, but remember that for
distance and contact con-straints, we use something like nTG
instead of just G. The result of doing this withsome vector z R3
for instance is
zTGM1GTn = m1zT z + (p z)J1(p z). (37)And thats not too bad
after all.
Lets move on now to the two body case. We can partition the
Jacobian as
G =[G (1) G (2)
](38)
and so our computation now is
GM1GT =[G (1) G (2)
] [M (1) 00 M (2)
] [G (1)
G (2)
]= G (1)M (1)
1G (1)
T+G (2)M (2)
1G (2)
T.
(39)
In other words, we just get a simple sum of terms.Notice that
the matrix GM1GT has units of inverse mass and so (GM1GT )T
is some kind of inertia of the composite body when you apply a
force of the formf = GT to it, i.e., a force that attempts to
violate the constraint. But dont stretchthe analogy too much
because GM1GT 6= 0 for a body in contact with the groundbut
nevertheless, it has infinite inertia against forces that push it
to the ground.
10