Embed Size (px)
Citation preview
MODUL 6
Laplace transformationen
Forfattere:Michael ELMEGARD & Øistein WIND-WILLASSEN
24. juni 2014

2

Indhold
1 Laplace transformationen 51.1 En lineær transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2 Lidt krav til f (t), funktionsklassen L . . . . . . . . . . . . . . . . . . . . . . . 101.3 Translation, differentiation, integration og partialbrøker . . . . . . . . . . . . . . 13
1.3.1 Translation i t-domænet, f (t−a) . . . . . . . . . . . . . . . . . . . . . 141.3.2 Afledte i t-domænet, f (n)(t) . . . . . . . . . . . . . . . . . . . . . . . . 161.3.3 Integraler i t-domænet,
∫ t0 f (τ)dτ . . . . . . . . . . . . . . . . . . . . . 21
1.3.4 Translation i s-domænet . . . . . . . . . . . . . . . . . . . . . . . . . . 231.3.5 Periodiske funktioner . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
1.4 Teaser: en lineær partielle differentialligning . . . . . . . . . . . . . . . . . . . . 261.5 Tabel: operationer for Laplace transformationen . . . . . . . . . . . . . . . . . . 29
3

4 INDHOLD

Kapitel 1
Laplace transformationen
I det følgende skal vi stifte bekendtskab med et matematisk værktøj – Laplace transformationen –der finder anvendelse indenfor en lang række ingeniørtekniske udfordringer, eksempelvis elektri-ske kredsløb, varmetransmission, mekaniske svingninger og reguleringsteknik. Mere generelt erdet et formidabelt værktøj til at simplificere løsningsprocessen forbundet med differentiallignin-ger. En af de smarte ting ved Laplace transformationen er, at den blandt andet kan transformeredifferentialligninger til algebraiske problemer som man sa løser med simple regneregler og trans-formerer tilbage, dette er visualiseret i Figur 1.1. Rent formelt er Laplace transformationen, L ,af en funktion f (t) defineret ved
Definition 1.1.L { f (t)}= F(s) =
∫∞
0f (t)e−stdt. (1.1)
Vi antager desuden at t ≥ 0. Den inverse Laplace transformation noteret som L −1{F(s)}= f (t).Der findes en inversionsformel, men den er, overraskende nok, praktisk talt unødvendiggjortaf f.eks. matematiske programmer som Maple og Mathematica og opslag i lister over Laplacetransformationer, se Tabel 1.1.
For eksemplets skyld viser vi hvordan transformationen udregnes for to simple funktioner.Først ser vi hvorledes man transformerer en konstant funktion f (t) = 1.
5
6 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Algebraisk Ligning(AL)
Differentialligning(DL)
Løs denAlgebraiske Ligning
Løsning tilDifferentialligningen
L
Simpel Algebra
L −1
Andre metoder
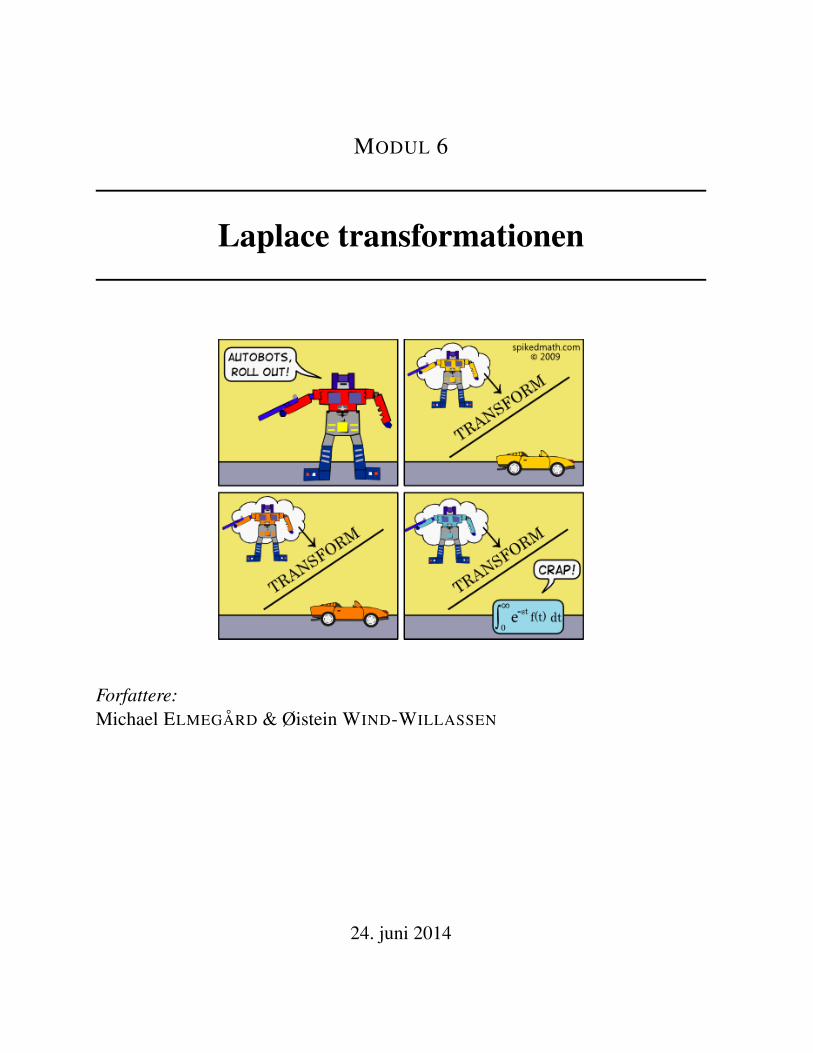
Figur 1.1: Fremgangsmaden til løsning af differentialligninger med Laplace transformationen.Algoritmen udføres i tre trin: 1) Laplace transformer differentialligningen (dette gøres ved atanvende alle de sætninger som vi har gennemgaet i det foregaende); 2) Løs den algebraiske lig-ning (dette gøres ved at isolere den variabel/funktion som man vil bestemme); 3) bestem deninverse Laplace transformation til den nyligt isolerede ubekendte funktion (dette gøres ved at be-nytte matematikprogrammer som Matlab, Maple, Mathematica eller tabelopslag eller kompleksintegration). Herved er differentialligningen løst.
Eksempel 1.1. Givet f (t) = 1 for alle t ≥ 0, find F(s).
Vi benytter Ligning (1.1) fra definitionen pa Laplace transformationen, altsa
F(s) = L ( f (t)) =∫
∞
0f (t)e−stdt,
=∫
∞
01 · e−stdt,
=
[−1s
e−st]∞
0,
=1s
(s > 0).
Bemærk at integralet ikke er defineret for s≤ 0. (Overbevis lige dig selv om dette!)

1.1. EN LINEÆR TRANSFORMATION 7
I det næste eksempel finder vi Laplace transformationen F(s) af den rette linie f (t) = ax medhældning a = 1.
Eksempel 1.2. Givet f (t) = t for alle t ≥ 0, find F(s).
Vi benytter Ligning (1.1) fra definitionen pa Laplace transformationen, altsa
F(s) = L ( f (t)) =∫
∞
0f (t)e−stdt,
=∫
∞
0t · e−stdt,
=
[(ts− 1
s2
)e−st
]∞
0,
=1s2 (s > 0).
Bemærk at integralet ikke er defineret for s≤ 0. (Overbevis lige dig selv om dette!)
Vi skal i det følgende gennemga de mest essentielle matematiske omstændigheder og udlede enrække vigtige regneregler. Ydermere, skal vi undersøge Laplace transformationer for nogle af deofte anvendte funktioner, f.eks., eλ t ,cos(ωt),sin(ωt) og Heavisides trinfunktion. Desuden skalvi ogsa vise hvordan man kan behandle en bred vifte af differentialligninger med denne metode.
Tanken med modulets opbygning er at det opbygger det matematiske fundament for anven-delsen af Laplace transformationen samtidig med at man lærer at anvende den pa relevante in-geniørtekniske problemer. Man vil erfare at man kan handtere avancerede anvendelser, og indenlænge kan man f.eks. løse en lang række lineære differentialligninger!
1.1 En lineær transformationLad os allerførst overveje betydningen af Ligning (1.1). Vi forestiller os, at f (t) er en vilkarligfunktion af tid, altsa f.eks. et elektrisk signal eller udbøjningen af tippen pa en bjælke; i dettetilfælde overfører Laplace transformationen f (t) til en ny funktion F(s), altsa
L : f (t) 7→ F(s). (1.2)
Transformationen identificerer funktionen f af variablen t med en ny funktion F i en ny variabels (se figur 1.2).
L er en sakaldt lineær operator og dette er kendetegnet ved egenskaberne
L ( f1(t)+ f2(t)) = L ( f1(t))+L ( f2(t)), (1.3)L (c f (t)) = cL ( f (t)), (1.4)

8 KAPITEL 1. LAPLACE TRANSFORMATIONEN
F(s)
L
L −1
f (t)
Figur 1.2: Laplace transformationen, L afbilder funktioner i den uafhængige variabel t til funk-tioner i den uafhængige variabel s. Omvendt afbilder den inverse Laplace transformation funk-tioner i den uafhængige variabel s til funktioner i den uafhængige variabel t.
hvor c er en vilkarlig konstant. Vi kalder de to egenskaber additivitet og homogenitet. Beggeegenskaber følger direkte af definitionen,
L ( f1(t)+ f2(t)) =∫
∞
0( f1(t)+ f2(t))e−stdt,
=∫
∞
0f1(t)e−stdt +
∫∞
0f2(t)e−stdt,
= L ( f1(t))+L ( f2(t)).
Tilsvarende kan man vise homogenitetsegenskaben. (Gør det lige, for at overbevise dig selv,det tager kun et øjeblik). Desuden er den inverse Laplace transformation ogsa en lineær operator.Bemærk, at disse egenskaber er enormt vigtige. Den ene medfører, at vi kan transformere hvertenkelt led i en ligning hver for sig, og den anden at amplituderne af funktionerne overføresuændret. Se nu hvordan vi f.eks. kan bestemme Laplace transformationen til den lineær funktionf (t) = at +b hvor a,b er vilkarlige konstanter.
Eksempel 1.3. (Linearitet af Laplace transformationen).
f (t) = at +b.
Laplace transformationen kan opslittes pa følgende made,
L ( f (t)) = F(s) = L (at +b),= L (at)+L (b),= aL (t)+bL (1),
hvor vi først har gjort brug af Ligning (1.3) til at splitte ledene fra hinanden og dernæst Lig-ning (1.4) til at flytte konstanterne udenfor transformationen. Den endelige transformation

1.1. EN LINEÆR TRANSFORMATION 9
findes nu ved at anvende resultaterne fra Eksempel 1.1 og Eksempel 1.2 for at opna,
F(s) =as2 +
bs.
Det betyder altsa at f (t) = 5t +6 f.eks. har Laplace transformationen F(s) = 5s2 +
6s .
Netop pga. disse egenskaber kan vi altsa klare os med at kende transformationer for nogle fafunktioner hver for sig og i Tabel 1.1 har vi opskrevet de hyppigst forekommende.
Tabel over Laplace transformationer
F(s) f (t)
1s 1
1s2 t
1sn , n = 1,2, . . . tn−1
(n−1)!
1s−a eat
ω
s2+ω2 sinωt
ss2+ω2 cosωt
ω
(s−a)2+ω2 eat sinωt
s−a(s−a)2+ω2 eat cosωt
e−as
s , a > 0 ua(t)
Tabel 1.1: Laplace transformationer af kendte funktioner (Joel Schiff: ”The Laplace Transform— Theory and Applications ”).
Vi har foreløbig undgaet diskussionen om for hvilke funktioner integralet giver mening –heldigvis kan en stor klasse af funktioner anvendes og det vil vi forklare i den følgende sektion.

10 KAPITEL 1. LAPLACE TRANSFORMATIONEN
1.2 Lidt krav til f (t), funktionsklassen L
Vi skal nu beskrive en klasse af funktioner som vi vil holde os indenfor i dette modul. Helt gene-relt kan man tale om funktionsklassen af alle de funktioner for hvilke Laplace transformationener meningsfuld, altsa de f (t) hvor integralet i Ligning (1.1) kan beregnes. Af praktiske arsagerog med tanke pa den tekniske anvendelse som vi har for øje, kan vi med fordel begrænse os til enmarginalt mindre klasse af funktioner og derved spare os selv for en enorm mængde matematiskespidsfindigheder. Lad os benævne denne klasse af funktioner ved L og definere den pa følgendemade,
Definition 1.2. Klassen L bestar af funktionerne f som er
• stykkevis kontinuerte pa [0,∞[,
• af eksponentiel orden α ⇔ | f (t)| ≤Meαt .
Intuitivt kan man sige, at de stykkevis kontinuerte funktioner dækker over dem som vi kan tegnemed en blyant hvor vi kun ma løfte blyanten et endeligt antal gange i ethvert interval [0,b].Geomtrisk set kan man ogsa huske pa, at den eksponentielle orden betyder, at | f (t)| bare skalkunne holdes under kurven for en eksponential funktion Meαt .
I praksis dækker disse funktioner over de fleste ingeniørtekniske udfordringer hvor man malereller beregner en proces hvor input og output ikke eksploderer. I Figur 1.2 giver vi to grafiskeeksempler.
Vi nævner uden bevis denne meget vigtige sætning vedrørende funktionerne i klassen L,
Sætning 1.1. Hvis f (t) ∈ L sa eksisterer Laplace transformationen F(s) = L ( f (t)) fors > α og integralet er absolut konvergent.
Med Sætning 1.1 er vi nu pa sikker grund og godt udrustet til at anvende Laplace transforma-tionen. Vi ser nu nærmere pa de meget velkendte trigonometriske funktioner og eksponential-funktionen. Lad os i det følgende eksempel beregne Laplace transformationen for eksponential-funktionen eλ t hvor λ ∈ C, altsa
Eksempel 1.4. Givet f (t) = eλ t for alle t ≥ 0, find F(s).
Bemærk at f (t) tilhører funktionsklassen L. Dette følger direkte fordi eksponentialfunktionener af eksponentiel orden α(> Re(λ )) og ydermere kontinuert pa intervallet.
1.2. LIDT KRAV TIL F(T ), FUNKTIONSKLASSEN L 11
0.5
0
t
f(t)
0.5
0
t
f(t)
0t
f(t)
0
M
t
f(t) M⋅eαt
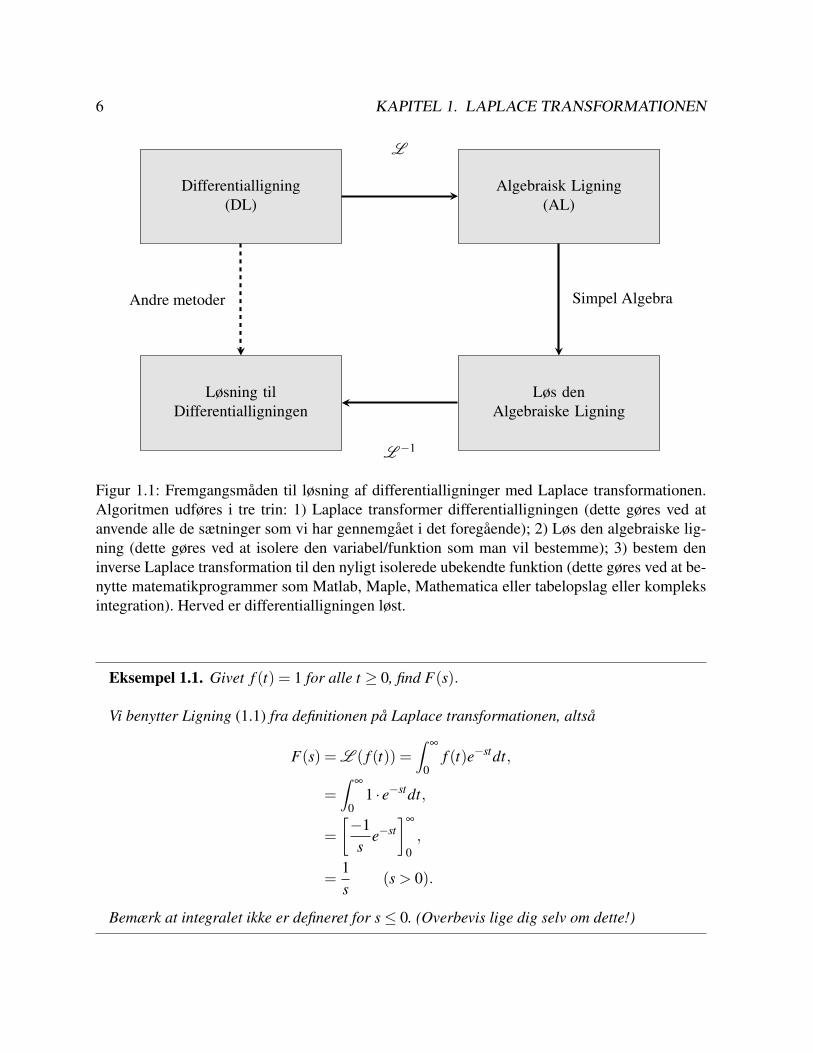
Figur 1.3: Øverst: f (t) = 1/(t− 0.5). Denne funktion har en lodret asymptote og hører ikke tilklassen L. Nederst: en stykkevis kontinuert funktion som er begrænset og tilhører klassen L.
Dernæst benytter vi Ligning (1.1) fra definitionen pa Laplace transformationen, altsa
F(s) = L ( f (t)) =∫
∞
0f (t)e−stdt,
=∫
∞
0eλ te−stdt,
=
[−1
λ − se(λ−s)t
]∞
0,
=1
s−λ(s > Re(λ )).
Bemærk igen, at ligningen kun er gældende nar s er større end real-delen af λ fordi detteforbehold sikrer at e(λ−s)t → 0 nar t→ ∞.
Fra det foregaende eksempel og ved at gøre brug af superpositionsprincippet fra tidligere ogEulers formel1 kan man lynhurtigt vise de tilsvarende transformationer for cos(ωt) og sin(ωt).
1Eulers formel: eiθ = cos(θ)+ isin(θ) hvor θ er et reelt tal.

12 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Eksempel 1.5. Givet f (t) = cos(ωt) for alle t ≥ 0, find F(s).
Indse først at f (t) tilhører funktionsklassen L. I stedet for at indsætte f (t) i definitionen somi de foregaende eksempler, bemærker vi at man vha. Eulers formel kan skrive cos(ωt) =eiωt+e−iωt
2 . Dermed bliver
F(s) = L (cos(ωt)),
= L
(eiωt + e−iωt
2
)=
12L (eiωt)+
12L (e−iωt),
=12
(1
s− iω+
1s+ iω
), (s > 0),
=s
s2 +ω2 , (s > 0),
Vis pa samme made resultatet for sin(ωt), nemlig L (sin(ωt)) = ω
s2+ω2 .
Vi nævner uden bevis en sætning som vedrører Laplace transformationers asymptotiske opførsel.
Sætning 1.2. Hvis f (t) ∈ L sa gælder F(s)→ 0 for s→ ∞.
Dette er et ganske praktisk resultat, fordi det giver os en nødvendig betingelse for at F(s) overho-vedet kan være en Laplace transformation af f (t)∈L. F.eks. kan F(s) = es ikke være en Laplacetransformation af f (t) ∈ L. Vi tjekker et par af vores tidligere resultater fra eksemplerne.
Eksempel 1.6. Laplace transformationerne for f (t) = 1, f (t) = t og f (t) = eλ t .
F(s) = L (1) =1s→ 0, s→ ∞,
F(s) = L (t) =1s2 → 0, s→ ∞.
Vi ser altsa at vores transformationer i det mindste overholder det nødvendige krav. Bemærk,at nar et krav en nødvendig betingelse er det ikke tilstrækkeligt til at vise hvorvidt vi harregnet rigtigt!

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 13
c
m
k
f(t)
x
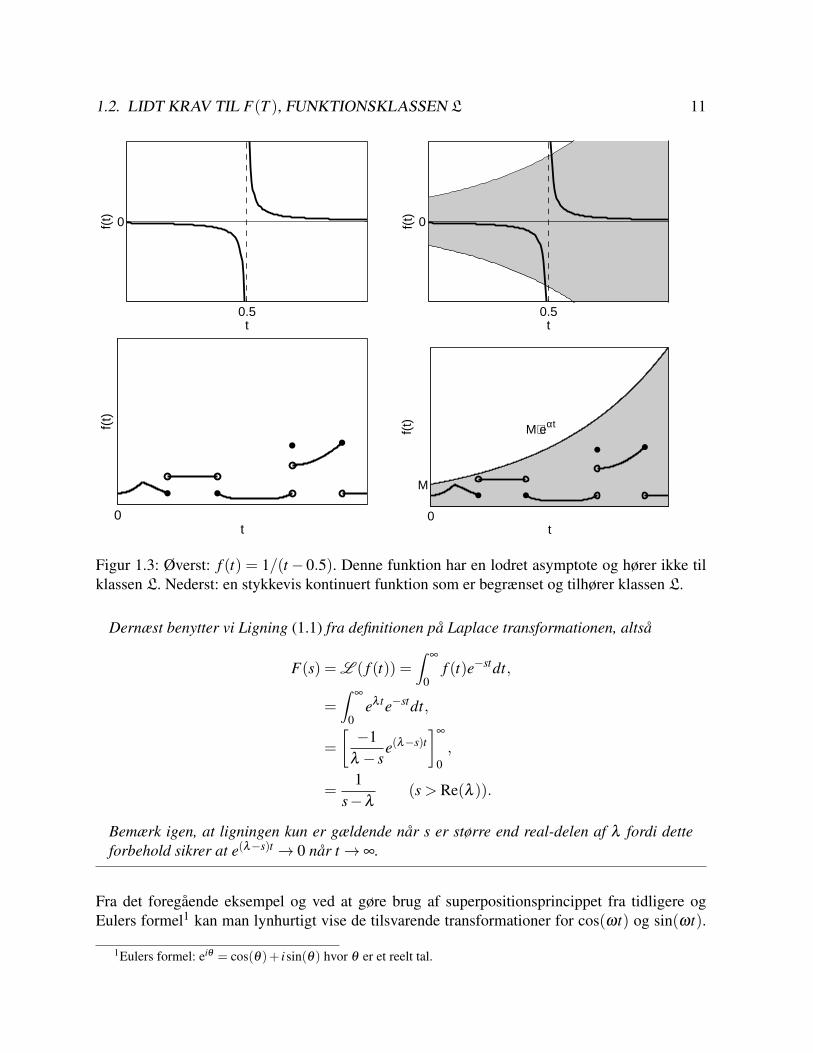
Figur 1.4: Mass, spring and damper system diagram.
Dette er værd at huske nar man regner! I den næste sektion ser vi nærmere pa hvordan Laplacetransformationen hjælper os med at handtere f.eks. f ′(t) og
∫ t0 f (τ)dτ .
1.3 Translation, differentiation, integration og partialbrøker
En af de helt store styrker ved Laplace transformationen er som nævnt tidligere at vi kan handteredifferentialligninger pa en relativt simpel made. Det bliver let som en leg at løse sakaldte begyn-delsesværdiproblemer2. Disse kunne f.eks. være det velkendte mekaniske system
Masse/fjeder/dæmper system (se figur 1.4):
mx+ cx+ kx = f (t), (1.5)x(0) = a og x(0) = b. (1.6)
Hvor m er massekonstanten, c er dæmpningskonstanten og k er fjederkonstanten. Det meka-niske system er under pavirkning af en kraft f (t).
Et andet eksempel er det ækvivalente elektriske kredsløb
2Det er dem hvor man har betingelser der skal opfyldes til tiden t = t0.
14 KAPITEL 1. LAPLACE TRANSFORMATIONEN
E
R
L
C
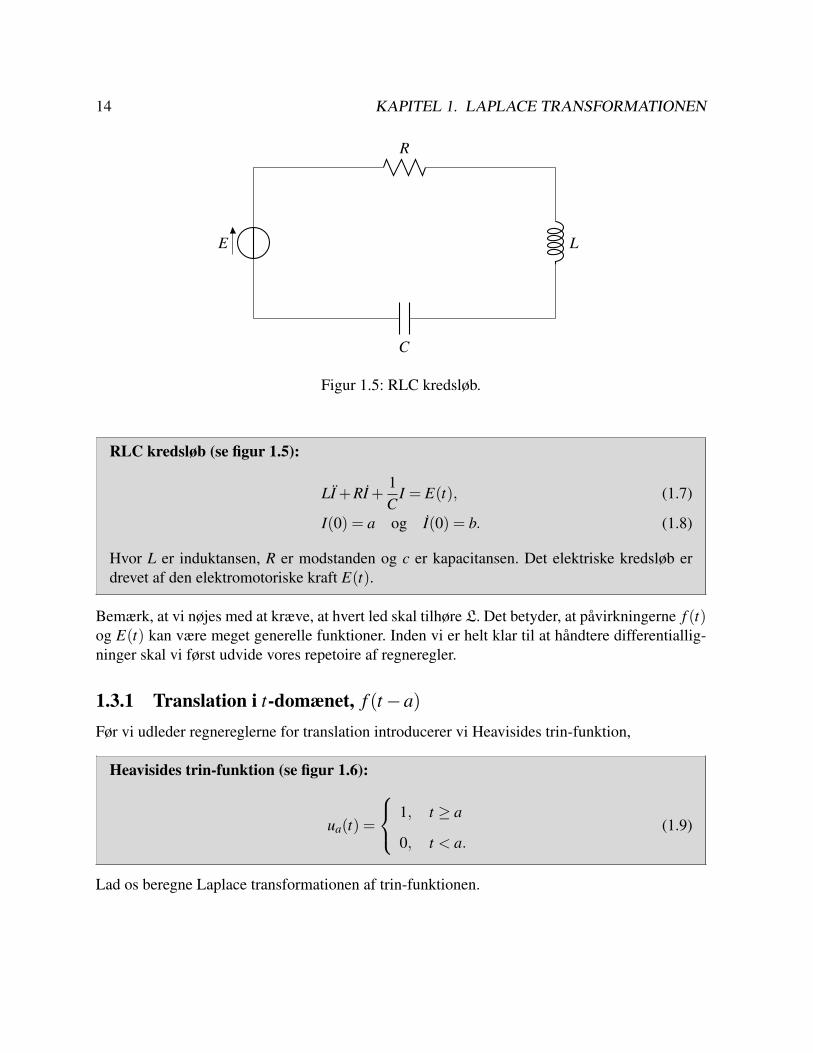
Figur 1.5: RLC kredsløb.
RLC kredsløb (se figur 1.5):
LI +RI +1C
I = E(t), (1.7)
I(0) = a og I(0) = b. (1.8)
Hvor L er induktansen, R er modstanden og c er kapacitansen. Det elektriske kredsløb erdrevet af den elektromotoriske kraft E(t).
Bemærk, at vi nøjes med at kræve, at hvert led skal tilhøre L. Det betyder, at pavirkningerne f (t)og E(t) kan være meget generelle funktioner. Inden vi er helt klar til at handtere differentiallig-ninger skal vi først udvide vores repetoire af regneregler.
1.3.1 Translation i t-domænet, f (t−a)
Før vi udleder regnereglerne for translation introducerer vi Heavisides trin-funktion,
Heavisides trin-funktion (se figur 1.6):
ua(t) =
1, t ≥ a
0, t < a.(1.9)
Lad os beregne Laplace transformationen af trin-funktionen.

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 15
0 a0
1
t
f(t)
Figur 1.6: Heavisides trin-funktion.
Eksempel 1.7. Laplace transformationen af trin-funktionen:
F(s) = L (ua(t)),
=∫
∞
0ua(t)e−stdt,
=∫
∞
ae−stdt,
=e−as
s, (s > 0).
Sammenlign dette resultat med Eksempel 1.1 nar a = 0.
Bemærk at trin-funktionen giver os en mere kompakt made at skrive stykkevis kontinuerte funk-tioner pa. F.eks. kan man pa en simpel made skrive boks-funktionen som en kombination af totrin-funktioner ( fboks(t) = ua(t)−ub(t) hvor a < b, skitser funktionen og overvej hvorledes mankan bruge dette til at skrive en stykkevis defineret funktion). Lad os nu vise det følgende resultat.
Sætning 1.3. (Translation i t-domænet). Hvis F(s) = L ( f (t)), sa gælder
L (ua(t) f (t−a)) = e−asF(s), (a≥ 0). (1.10)
Bevis. Resultatet følger umiddelbart direkte ved anvendelse af definitionen pa Laplace transfor-

16 KAPITEL 1. LAPLACE TRANSFORMATIONEN
mationen.
L (ua(t) f (t−a)) =∫
∞
0e−stua(t) f (t−a)dt,
=∫
∞
ae−st f (t−a)dt.
Benyt koordinatskiftet τ = t−a for at opna
L (ua(t) f (t−a)) =∫
∞
0e−s(τ+a) f (τ)dτ,
= e−as∫
∞
0e−sτ f (τ)dτ,
= e−asL ( f (τ)),
= e−asF(s).
Vi har hermed kommet frem til Ligning (1.10).
Sætning 1.3 er enormt praktisk i systemer hvor man tænder og slukker for pavirkninger, f.eks. iet elektrisk kredsløb. En praktisk fortolkning af translation er at man forsinker et signal eller enpavirkning fra t = 0 til t = a.
1.3.2 Afledte i t-domænet, f (n)(t)
Nar vi skal handtere differentialligninger far vi brug for at kunne transformere afledte af f (t),f.eks. f ′, f ′′, f ′′′. Dette er formuleret i de følgende sætninger.
Sætning 1.4. (Transformation af afledte). Lad f være kontinuert pa [0,∞[ og af eksponentielorden α og lad f ′ være stykkevis kontinuert pa [0,∞[. Sa
L ( f ′(t)) = sL ( f (t))− f (0), (ℜ(s)> α). (1.11)
Bevis. Dette viser vi ved at anvende partiel integration∫ b
au(t)v′(t)dt = [u(t)v(t)]ba−
∫ b
au′(t)v(t)dt
hvor vi fra definitionen pa Laplace transformationen L ( f ′(t)) =∫
∞
0 e−st f ′(t)dt vælger u(t) =e−st og v(t) = f (t). Ved direkte indsættelse giver det,
∫∞
0e−st f ′(t)dt = [e−st f (t)]∞0 + s
∫∞
0e−st f (t)dt,
= limτ→∞
e−sτ f (τ)− f (0)+ s∫
∞
0e−st f (t)dt,
=− f (0)+ sL ( f (t)), (ℜ(s)> α).

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 17
Vi har hermed vist sætningen.
Det er fornuftigt at bemærke detaljerne i det ovenstaende bevis, altsa hvor opstar antagelsernesom star i Sætning 1.4. F.eks. er den eksponentielle orden α nødvendig for at vi kan ga fra dennæstsidste ligning til den sidste. Det er nærliggende at tænke over hvorledes dette forsætter tilhøjere ordens afledte. Dette er formuleret i følgende generalisering (uden bevis):
Sætning 1.5. (Transformation af n’te ordens afledte). Lad f (t), f ′(t), . . . , f (n−1)(t) være kon-tinuert pa [0,∞[ og af eksponentiel orden α og lad f (n)(t) være stykkevis kontinuert. Sa
L ( f (n)(t)) = snL ( f (t))− sn−1 f (0)− sn−2 f ′(0)−·· ·− f (n−1)(0). (1.12)
Det medfører f.eks. resultatet for andenordens afledte,
L ( f ′′(t)) = s2L ( f (t))− s f (0)− f ′(0). (1.13)
(Opskriv tilsvarende udtrykket for L ( f ′′′(t)) ved hjælp af Ligning 1.12). Inden vi begiver os ud iat løse vores første differentialligning med Laplace transformationen giver vi et kort overblik overde enkelte trin der er forbundet med denne udfordring. Betragt igen Figur 1.1 som forklarer hvor-dan Laplace transformationen benyttes til løsning af differentialligninger. Det er vigtigt at nævneat der findes andre løsningsmetoder til lineære differentialligninger og derfor er det nærliggendeat undre sig over hvorfor vi finder et behov for at introducere endnu en metode. Det fordelagtigeved denne metode er blandt andre ting at man kan behandle diskontinuerte pavirkninger, f.eks.en elektromotorisk kraft som tænder og slukker pa en relativt simpel made. Desuden fremhævermetoden hvordan enkelte elementer i et system pavirker den komplette løsning og dette kanman med fordel udnytte i f.eks. reguleringsteknik hvor man er interesseret i at regulere et givetsystems opførsel.
Lad os nu teste vores regneregler for de afledte pa den simpleste differentialligning vi kanfinde pa.
Eksempel 1.8. (Bevægelse med konstant hastighed.) Lad x(t) være positionen af en par-tikel/bil/person/bold der bevæger sig pa en linie. Vi kræver, at partiklen bevæger sig medkonstant hastighed v. Dette formulerer en ordinær differentialligning
dxdt
= v.

18 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Vi ved pa forhand at løsningen til denne ligning er x(t) = x(0)+ vt, men lad os alligevelanvende Laplace transformationen:
L (x′(t)) = L (v), ⇔
sX(s)− x(0) =vs, (s > α), ⇔
X(s) =x(0)
s+
vs2 .
Vi genkender denne transformation fra Eksempel 1.3, og finder x(t),
x(t) = L −1(X(s)),= x(0)+ vt.
Det ovenstaende eksempel kunne ogsa løses ved direkte integration. For træningens skyld forsæt-ter vi med endnu et simpelt eksempel.
Eksempel 1.9. (Frit fald uden friktion). Inden Galileo Galilei udførte sit eksperiment sompaviste at legemer falder lige hurtigt i frit fald uanset vægt var det en udbredt misforstaelseat tunge legemer faldt hurtigst. Galileo paviste netop, at alle legemerne i frit fald har densamme accelleration – nemlig tyngdeacceleration g. Vi lader x(t) angive den vertikale posi-tion og specificerer to begyndelsesbetingelser, positionen og hastigheden – vi lader x(0) = x0og vælger x′(0) = v0. Systemet som vi skal løse er altsa
x′′ = g,x(0) = x0,
x′(0) = v0.
Vi anvender nu Laplace transformationen pa differentialligningen,
L (x′′(t)) = L (g),
s2X(s)− sx(0)− x′(0) =gs,
X(s) =x(0)
s+
x′(0)s2 +
gs3 .
Vi finder nu x(t) ved at transformere hvert led, f.eks. benytter vi at L (t2) = 2/s3. Hermedfinder vi x(t) og indsætter samtidig begyndelsesbetingelserne,
x(t) = L −1(X(s)) = x0 + v0t +12
gt2.

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 19
I det faktiske eksperiment slap Galileo to legemer af samme materiale fra det skæve tarn iPisa og viste at det tog den samme tid for legemerne at na jorden. Vi kan se at han havderet ifølge vores formel fordi bevægelsesligningen for x(t) er uafhængig af legemets masse.Hvorvidt Galileo rent faktisk udførte det omtalte eksperiment fra det skæve tarn i Pisa ertvivlsomt, men det er en god historie!
Lad os nu forsætte med et mere generelt eksempel, nemlig en inhomogen anden-ordens lineærdifferentialligning med konstante koefficienter og begyndelsesbetingelser - det ser saledes ud
ax′′+bx′+ cx = f (t), (1.14)x(0) = x0, x′(0) = v0. (1.15)
Bemærk, at a,b,c og f (t) kan vælges sa man har et RLC kredsløb eller et masse/fjeder/dæmpersystem. Rent formelt, tager vi nu Laplace transformationen af Ligning (1.14), altsa
a[s2X(s)− sx(0)− x′(0)
]+b [sX(s)− x(0)]+ cX(s) = F(s), ⇔
X(s) =(as+b)x(0)+ax′(0)
as2 +bs+ c+
F(s)as2 +bs+ c
.
I en mere overskuelig form kan det skrives som
X(s) =P(s)Q(s)
+F(s)Q(s)
, (1.16)
hvor
Q(s) = as2 +bs+ c,P(s) = (as+b)x(0)+ax′(0).
Man finder nu x(t) ved at anvende den inverse Laplace transformation, altsa x(t) = L −1(X(s)),men dette kræver behandling af flere specialtilfælde. Bemærk, at der findes matematiske pro-grammer som kan handtere standard Laplace transformationer (ogsa den inverse) direkte, f.eks.Maple, Mathematica og Matlab. Inden man havde programmer der kunne handtere disse trans-formationer symbolsk, var man nødsaget til at manipulere udtrykkene P(s)/Q(s) og F(s)/Q(s)ved at splitte dem op i mindre komplicerede dele som man kendte den inverse transformationtil. Denne fremgangsmade er baseret pa en opsplitning af en polynomiumsbrøk i dens sakaldtestambrøker (engelsk: partial fraction expansion/decomposition). Lad os give et eksempel pa op-splitning i stambrøker,

20 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Eksempel 1.10. (Opsplitning i stambrøker). Bestem den inverse Laplace transformation af
F(s) =5s
(s2 +1)(s2 +2s+2).
Vi kender ikke umiddelbart f (t) = L −1(F(s)), men det er muligt at splitte F(s) op i denssakaldte stambrøker. Saledes kan man opna,
F(s) =1/2+ i
s+ i+
1/2− is− i
+−1/2−3/2i
s+1− i+−1/2+3/2i
s+1+ i,
og til disse kender vi de inverse Laplace transformationer (anvend linearitetsegenskaberneLigning (1.3) og (1.4) og se Eksempel 1.4 eller en Tabel 1.1). Vi viser hvordan man kan gøremed det første led,
L −1(
1/2+ is+ i
)= (1/2+ i) ·L −1
(1
s+ i
),
= (1/2+ i) · e−it .
Pa samme made kan man finde de resterende transformationer og ved at anvende Eulersformel pa det samlede resultat kan udtrykket reduceres til,
f (t) = L −1(F(s)) = cos(t)+2sin(t)− e−t(cos(t)+3sin(t)) (1.17)
Vi skal i dette modul ikke komme ind pa hvorledes man systematisk udfører opsplitning tilstambrøker, men blot nævne at dette ogsa kan udføres i diverse matematikprogrammer, f.eks.umiddelbart via funktioner som ’residue()’ i Matlab eller ’convert()’ i Maple eller ’Apart()’i Mathematica.
Som nævnt tidligere findes der i Tabel 1.1 en række praktiske transformationer til opslag. Alterna-tivt kan man finde den inverse transformation vha. kompleks integration, men dette forudsætter,som nævnt tidligere, en del kendskab til kompleks funktionsteori som vi ikke skal ind pa i dettemodul - desuden er konklusionen dog ogsa, at matematik-programmer er meget brugbare i dennesammenhæng.
Lad os undersøge det følgende generelle system
Eksempel 1.11. (Anden-ordens differentialligning under harmonisk pavirkning). I dette ek-sempel tager vi fat pa et specialtilfælde af differentiallignings-systemet (1.14) med begyndel-sesbetingelserne (1.15). (Systemet er ogsa et specialtilfælde af de tidligere nævnte praktiskesystemer givet ved differentialligningerne (1.5) og (1.7)).
x+2x+2x = 5cos(t), (1.18)x(0) = 1, x(0) =−1. (1.19)

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 21
Ved anvendelse af Ligning (1.16), altsa ved at tage Laplace transformationen pa systemet,kan vi skrive
X(s) = P(s)/Q(s)+F(s)/Q(s),
hvor X(s) ved indsættelse findes som,
X(s) =s+1
s2 +2s+2+
5s(s2 +1)(s2 +2s+2)
.
Vi finder x(t) ved at bestemme den inverse Laplace transformation,
x(t) = L −1(X(s)),
= L −1(
s+1s2 +2s+2
+5s
(s2 +1)(s2 +2s+2)
).
For at bestemme den inverse Laplace transformation til dette udtryk kan vi enten gøre det di-rekte ved brug af f.eks. ’invlaplace()’ i Maple eller ’ilaplace()’ i Matlab eller vha. opslitningi stambrøker hvor vi i Eksempel 1.10 handterede den ene af brøkerne. Vi far saledes direkte
x(t) = cos(t)+(2−3e−t)sin(t).
Vi tjekker om løsningen er korrekt ved at verificere at den overholder startbetingelserne (tiltiden t = 0) og differentialligningen (for alle t > 0). Pa den made er vi helt sikre pa at vi harregnet rigtigt.
Bemærk, at vi ikke har redegjort for hvorvidt det var meningsfuldt at anvende Laplace transfor-mationen pa alle de afledte, altsa om antagelserne i Sætning 1.5 er overholdt. Generelt gælderdet for n’te ordens lineære differentialligninger med konstante koefficienter, at Laplace transfor-mationen er veldefineret for pavirkninger f (t) som er kontinuerte og af eksponentiel orden.
1.3.3 Integraler i t-domænet,∫ t
0 f (τ)dτ
I adskillige anvendelser opstar der naturligt integraler i differentialligningerne og sa kalder mandem integro-differentialligninger. Et typisk eksempel pa en sadan er det elektriske kredsløb fraFigur 1.7. Integro-differentialligningen for dette kredsløb er,
LI +1C
∫ t
0I(τ)dτ = E(t),
hvor L er induktansen, C er kapacitansen og E(t) er den elektromotoriske kraft. Vi skal nu vise,at Laplace transformationen ogsa kan handtere integralled uden de store kvaler. Lad os visefølgende sætning,

22 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Sætning 1.6. Hvis f er stykkevis kontinuert og af eksponentiel orden α ≥ 0, og
g(t) =∫ t
0f (τ)dτ, (1.20)
sa gælder
L (g(t)) =1sL ( f (t)), ℜ(s)> α. (1.21)
Bevis. I det første trin skal vi omskrive integralet L(g(t)) til noget mere bekvemt fordi vi gernevil finde en relation til f (t). Vi beviser dette vha. partiel integration som vi ogsa anvendte i bevisetfor Sætning 1.4. Lad os gentage formlen,∫ b
au(t)v′(t)dt = [u(t)v(t)]ba−
∫ b
au′(t)v(t)dt.
Nu sætter vi a = 0, b = ∞, u(t) = g(t) og v(t) = −1s e−st . Bemærk, at det følger af integralreg-
ningens hovedsætning, at f (t) = g′(t) nar g(t) =∫ t
0 f (τ)dτ . Vi kan saledes opna∫∞
0e−stg(t)dt =
[−1
se−stg(t)
]∞
0+
1s
∫∞
0e−st f (t)dt,
L (g(t)) =[−1
se−stg(t)
]∞
0+
1sL ( f (t)).
Vi indser dernæst, at det følger af definitionen3 af g(t) at g(0) = 0 og at limt→∞
e−stg(t) = 0 fordi
ℜ(s)> α . Tilsammen medfører dette, at vi har opnaet den ønskede identitet,
L (g(t)) =1sL ( f (t)).
Lad os afslutte med en eksemplarisk anvendelse inden vi forsætter med reglerne for differenti-ation og integration i s-domænet. Faktisk skal vi nu løse en sakaldt integro-differentialligning!
Eksempel 1.12. Integro-differentialligning – LC-circuit (se figur 1.7). Betragt det elektriskekredsløb givet ved
LI +1C
∫ t
0I(τ)dτ = E. (1.22)
3Husk at limt→0+
∫ t0 f (t)dt = 0

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 23
E L
C
Figur 1.7: LC kredsløb.
Se Figur 1.7 for et systemdiagram. De tre led repræsenterer henholdsvis induktans, kapaci-tans og elektromotorisk kraft og L,C og E er positive konstanter. Lad endvidere strømmenI(t) være givet som I(0) = 0 fra start. Vi Laplace transformerer nu Ligning (1.22) og anven-der Sætning 1.4 og Sætning 1.6, for saledes at opna
L(sL (I)− I(0))+L (I)
Cs=
Es, ⇔
L (I) =E
L(s2 +1/LC).
Man kan, som nævnt tidligere, finde den inverse Laplace transformation ved brug computer-programmer. Alternativt sa kan man ogsa gøre dette ved at anvende Tabel 1.1 – man skal blotindse at udtrykket for L (I) minder om inversionen for sinus og sa ændre lidt pa udtrykket.Vi finder løsningen,
I(t) = E
√CL
L −1
(1/√
LCs2 +1/LC
),
= E
√CL
sin(
1√LC
t).
Bemærk, at vi benyttede os af tabelopslaget L (sin(ωt)) = ω
s2+ω2 , hvor vi havde ω = 1√LC
.
1.3.4 Translation i s-domænet
I dette korte afsnit skal vi se nærmere pa hvorledes translation i s-domænet opfører sig i forholdtil Laplace transformationen.

24 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Sætning 1.7. Hvis F(s) = L ( f (t)) nar ℜ(s)> 0, sa
F(s−a) = L (eat f (t)), (a ∈ R,ℜ(s)> a). (1.23)
Bevis. Under forudsætningen af at Laplace transformationen er veldefineret for F(s) =L ( f (t))nar ℜ(s)> 0 følger det af definitionen at F(s−a) er veldefineret nar ℜ(s)> a. Derfor,
F(s−a) =∫
∞
0e−(s−a)t f (t)dt,
=∫
∞
0e−steat f (t)dt,
= L (eat f (t)).
Lad os give et eksempel pa hvordan man kan anvende dette resultat.
Eksempel 1.13. Vi ved fra tidligere, at
L (sin(ωt)) =ω
s2 +ω2 .
Det betyder, at hvis vi translaterer funktionen fra s til s−a og benytter Sætning 1.7 far vi, at
L (eat sin(ωt)) =ω
(s−a)2 +ω2 .
Dette kan være brugbart til at bestemme inverse transformationer direkte. (Bemærk, at detteogsa er forskellen pa en harmonisk svinging og dæmpet svingning).
Sætninger vedrørende operationer i s-domænet har umiddelbart lidt mere begrænset anvendelse iforbindelse med f.eks. differentialligninger, og alene derfor skal vi ikke tærske langhalm pa disseegenskaber. Vi noterer blot at der findes tilsvarende resultater for differentation og integration is-domænet (se evt. Tabel 1.2 for flere af disse egenskaber).
1.3.5 Periodiske funktionerVi skal give et resultat for periodiske funktioner. Vi kalder en funktion f (t) T-periodisk hvisf (t) = f (t +T ) for et T > 0 og alle t ≥ 0. (T er den mindste periode for funktionen). Velkendteeksempler pa periodiske funktioner er cos(ωt) og sin(ωt) der begge er T-periodiske med T =2π/ω .

1.3. TRANSLATION, DIFFERENTIATION, INTEGRATION OG PARTIALBRØKER 25
Sætning 1.8. Hvis F(s) = L ( f (t)) og f (t) er T-periodisk, sa er
F(s) =1
1− e−sT F1(s), (1.24)
hvor
F1(s) =∫ T
0e−st f (t)dt (1.25)
Bevis. Dette bevis udføres ved et enkelt koordinatskifte - en translation i integrationsvariablen,
F(s) = L ( f (t)),
=∫
∞
0e−st f (t)dt,
=∫ T
0e−st f (t)dt +
∫∞
Te−st f (t)dt,
= F1(s)+∫
∞
Te−st f (t)dt.
Observer dernæst, at man ved et koordinatskifte τ = t − T i det sidste integral i ovenstaendeligning kan opna ∫
∞
Te−st f (t)dt =
∫∞
0e−s(τ+T ) f (τ +T )dτ,
= e−sT∫
∞
0e−sτ f (τ)dτ,
= e−sT F(s),
hvorved vi har,
F(s) = F1(s)+ e−sT F(s). (1.26)
Den ønskede identitet følger straks ved at isolere F(s).
Sætning 1.8 giver os en god mulighed for at simplificere udregningen af Laplace funktionenfor forskellige periodiske funktioner f (t). Betragt det følgende eksempel pa en ’square-wave’funktion.
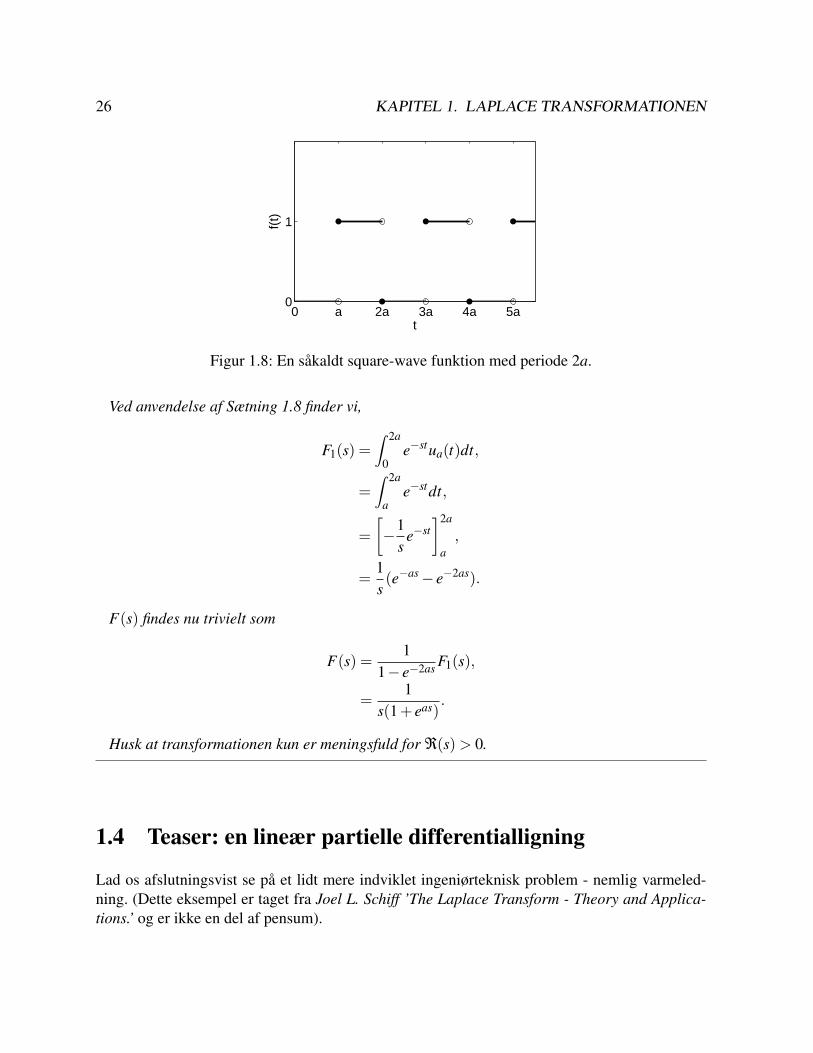
Eksempel 1.14. Square-wave funktionen er plottet pa Figur 1.8 og det ses, at foreskriftenpa den 2a-periodiske funktion kan gives vha. en trin-funktion pa intervallet [0,2a[.
f1(t) = ua(t), for 0≤ t < 2a.
26 KAPITEL 1. LAPLACE TRANSFORMATIONEN
0 a 2a 3a 4a 5a0
1
t
f(t)
Figur 1.8: En sakaldt square-wave funktion med periode 2a.
Ved anvendelse af Sætning 1.8 finder vi,
F1(s) =∫ 2a
0e−stua(t)dt,
=∫ 2a
ae−stdt,
=
[−1
se−st
]2a
a,
=1s(e−as− e−2as).
F(s) findes nu trivielt som
F(s) =1
1− e−2as F1(s),
=1
s(1+ eas).
Husk at transformationen kun er meningsfuld for ℜ(s)> 0.
1.4 Teaser: en lineær partielle differentialligning
Lad os afslutningsvist se pa et lidt mere indviklet ingeniørteknisk problem - nemlig varmeled-ning. (Dette eksempel er taget fra Joel L. Schiff ’The Laplace Transform - Theory and Applica-tions.’ og er ikke en del af pensum).

1.4. TEASER: EN LINEÆR PARTIELLE DIFFERENTIALLIGNING 27
Eksempel 1.15.
∂T∂ t
=∂ 2T∂x2 , t > 0, 0≤ x≤ l, (1.27)
T (x,0) = T0, (begyndelsesbetingelsen), (1.28)∂T∂x
(0, t) = 0, (den ene ende er isoleret!), (1.29)
T (l, t) = T1, (den anden ende har konstant temperatur T1). (1.30)
Vi anvender nu Laplace transformationen pa denne partielle differentialligning i tidsvariab-len t. Det betyder at vi forestiller os at T (x,s) = L (T (x, t)). Vi far saledes,
sT −T (x,0) =∂ 2T∂x2 ,
sT −T0 =∂ 2T∂x2 .
Husk at man kan opfatte s som en konstant i denne differentialligning. Faktisk kræver vi ats > 0. Den generelle løsning til ligningen kan skrives som (tjek dette, enten ved selv at findeløsningen eller ved at indsætte den!)
T (x,s) = c1 cosh(√
sx)+ c2 sinh(√
sx)+u0
s. (1.31)
Vi har kun brugt begyndelsesbetingelsen T0, vi bestemmer c1 og c2 ved at bruge de to rand-betingelser. Vi transformerer vores randbetingelser,
L
(∂T∂x
(0, t))= L (0) = 0, (1.32)
L (T (l, t)) = L (T1) =T1
s. (1.33)
(1.34)
Isolerings-randbetingelsen ved x= 0 medfører direkte at c2 = 0. I den anden ende, dvs. x= l,er randbetingelsen med konstant temperatur og denne giver os følgende sammenhæng,
T1
s= c1 cosh(
√sl)+
T1
s, ⇔ (1.35)
c1 =(T1−T0)
scosh(√
sl). (1.36)

28 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Løsningen i s-domænet er altsa givet ved,
T (x,s) =(T1−T0)cosh(
√sx)
scosh(√
sl)+
T0
s. (1.37)
Vi finder ved den inverse Laplace transformation løsningen i t-domænet til,
T (x, t) = T1 +4(T1−T0)
π
∞
∑n=1
(−1)n
2n−1e(2n−1)2π2t/(4l2) cos
(2n−1
2l
)πx. (1.38)
Hvor vi har benyttet os af
L −1(
cosh(√
sx)scosh(
√sl)
)= 1+
4π
∞
∑n=1
(−1)n
2n−1e(2n−1)2π2t/(4l2) cos
(2n−1
2l
)πx.
Det generelle løsningsudtryk indikerer at vi har sluppet let ved at arbejde i s-domænet!
Der findes en lang række andre partielle differentialligninger osv. hvor Laplace transformationenvirker formidabelt, dette var bare en smagsprøve!
1.5. TABEL: OPERATIONER FOR LAPLACE TRANSFORMATIONEN 29
1.5 Tabel: operationer for Laplace transformationen

30 KAPITEL 1. LAPLACE TRANSFORMATIONEN
Tabel over operationer for Laplace transformationer
F(s) f (t)
c1F1(s)+ c2F2(s) c1 f1(t)+ c2 f2(t)
F(as), a > 0 1a f( t
a
)F(s−a) eat f (t−a)
e−asF(s), a≥ 0 ua(t) f (t−a)
sF(s)− f (0+) f ′(t)
s2F(s)− s f (0+)− f ′(0+) f ′′(t)
snF(s)− sn−1 f (0+)− sn−2 f ′(0+)
− . . .− f (n−1)(0+) f (n)(t)
F(s)s
∫ t0 f (τ)dτ
F ′(s) −t f (t)
F(n)(s) (−1)ntn f (t)
∫∞
s F(ξ )dξ1t f (t)
F(s)G(s)∫ t
0 f (τ)g(t− τ)dτ
lims→∞
sF(s) limt→0+
f (t) = f (0+)
lims→0
sF(s) limt→∞
f (t)
Tabel 1.2: Relevante operationer for Laplace transformationen (Joel Schiff: ”The Laplace Trans-form — Theory and Applications ”).