Embed Size (px)
Citation preview

LAB RESULTS FROM THE GREGOR MCAO TEST BENCH
Dirk Schmidt1,2, Thomas Berkefeld2, and Frank Heidecke2
1 National Solar Observatory, P.O. Box 62, Sunspot, 88349 New Mexico, USA2 Kiepenheuer-Institut für Sonnenphysik, Schöneckstr. 6, 79104 Freiburg, GERMANY
Abstract. We present the performance of the GREGOR MCAO system. This MCAO system, whichactually is a tripple-conjugate adaptive optics, was set up in a laboratory test bench. GREGOR is the newGerman 1.5-meter solar telescope, and it is currently equipped with a 256-actuators classical adaptiveoptics system. On-sky tests of the MCAO system are planned for this observing season. A cooktop platewas used to generate turbulence in the test bench. We present measurements of residual agile imagedistortion, and of wavefront errors in the 19 guide directions.
1 Introduction
After 5 years of development, tests, and experiments, we present performance results gainedin the lab from the MCAO system for the solar telescope GREGOR. This system, which is atriple-conjugate system with simultaneously controlled deformable mirrors in 0, 8, and 25 kmconjugate planes, will be installed at the telescope in late 2013. GREGOR, located at the TeideObservatory on Tenerife (Spain), is a state-of-the-art solar telescope with a 1.5 meter primarymirror, which makes it the second largest optical solar telescope in the world. Because GRE-GOR is aimed on observations of the Sun with high spatio-temporal resolution, adaptive opticsand in particular multi-conjugate adaptive optics are extremely important to exploit the tele-scope’s large aperture for researching the solar surface on small scales but yet extended fieldsthrough Earth’s turbulent atmosphere.
In this paper, we give a short, and incomplete overview of the tests performed in the lab. Fora complete resume and more detailed aspects on the system, be referred to reference [1].
2 Laboratory testbed and control matrix
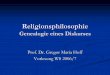
An image of the testbed as it was set up in the lab of the Kiepenheuer-Institut in Freiburg (Ger-many) is shown in figure 1. Most of the original components that will be moved to GREGORby the end of 2013 were used. Detailed descriptions of the GREGOR MCAO system werepublished in references [1–4].
The key features involve three deformable mirrors in 0, 8, and 25 km conjugate distances, andtwo correlating Hartmann-Shack wavefront sensors. One wavefront sensor, the on-axis WFS,exhibits small subapertures and a small field of view (here 15 cm and 10′′), where as the otherwavefront sensor, the multi-direction WFS, uses larger subapertures and a larger field of view(here 30 cm and 68′′). These sensor types are well known in the solar AO community[5].
Intuitively, the best order of the components in a closed-loop control would place both wave-front sensors downstream of all three deformable mirrors. In GREGOR, however, the opticaldesign is such that the deformable mirror in the pupil plane is upstream of the deformable con-jugate to high-altitudes. In order to avoid non-linear interactions of the deformable mirrors and
Third AO4ELT Conference - Adaptive Optics for Extremely Large TelescopesFlorence, Italy. May 2013ISBN: 978-88-908876-0-4DOI: 10.12839/AO4ELT3.13386

DDMM88 kkmm
oonn--aaxxiiss
WWFFSS
DDMM2255 kkmm
MM1166
MM1155
MM1199
mmuullttii--ddiirr
WWFFSS
MM1122
ccaamm
FF33
DDMM00 kkmm
TTTT
Fig. 1. The laboratory setup of the GREGOR MCAO in Freiburg. This system features three deformablemirrors at 0 km, 8 km, and 25 km distance. An on-axis HS-WFS is located before the high-altitude DMs,and a multi-direction HS-WFS is located behind all three DMs. A halogen light illuminates exchangeabletargets which imitate the coude focus (F3) of the telescope. A focal plane camera (cam) monitors theMCAO corrected image.
the wavefront sensors in such a configuration, the adaptive and the sensing components in theGREGOR MCAO are ordered in an—at the first sight—weird way:
DM0km → on-axis WFS → DM25km → DM8km → multi-direction WFS
The reasoning for this order was published in references [1,3,4].The control is established by the second evolutionary step of the Kiepenheuer-Insitut Adap-
tive Optics System, called KAOS Evo 2 (fig. 2). KAOS Evo 2 is a versatile control system basedon multi-CPU computers and has been used for various applications, the most prominent beingGREGOR’s classical AO system GAOS.256[6], as well as the AO system of the German Vac-uum Tower Telescope (VTT)[7], and the image stabilizing system of SUNRISE[8], both usingthe previous version of KAOS. This version was also used for the pioneering MCAO runs atthe VTT[9]. A first successful demonstration of a solar limb AO by the U.S. National SolarObservatory was also undertaken with KAOS Evo 2 recently at the Dunn Solar Telescope[10].
The control matrix SM, converting wavefront sensor image shifts into deformable mirrormodes, we used for the presented experiments reads
SM =
pinv(MSTT, MD-WFS) 0
pinv
MSDM0 km, MD-WFS
MSDM8 km, MD-WFS
MSDM25 km, MD-WFS
DMlow0 km
pinv(
MSDM0 km, OA-WFS)
DMhigh0 km
00
, (1)
where, for example, MSDM0 km, OA-WFS = ASDM0 km, OA-WFS MADM0 km denotes the modes-to-shiftsmatrix for DM0 km with respect to the on-axis wavefront sensor. The matrix ASDM0 km, OA-WFS
2
Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes

Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes

Fig. 3. The target image was a slide showing solargranulation (about 73′′) put into the coude focus mock-up F3. The WFSs pointed at 19 regions inside this im-age (fig. 4). This image was recorded for post-factoanalysis of local image motion.
Fig. 4. Pinhole asterism which configures the 19 guideregions, spanning about 60′′, that were used for wave-front sensing. All guide regions were used in the multi-direction WFS. Only the central direction was usedin the on-axis WFS. The pinhole asterism is in thebeam for calibration and referencing and is removedthereafter.
was located behind this focus to generate turbulence that spans the conjugate volume betweenDM8 km and DM25 km. The arrangement of the 19 guide regions is shown in figure 4.
3.1 Closed-loop performance estimation
The estimations of the closed-loop performance presented in this paper are based on two kindsof data:
1. Local correlation tracking of the target image structure recorded by the separate focal planecamera.
2. Wavefront sensor signals recorded by the KAOS control software. The image shifts seen bythe multi-direction wavefront sensor are used to reconstruct aberrations up to astigmatism inall 19 guide regions.
Figure 5 shows the temporal standard deviation of the local image across the field of view. Themean value of all subfields was reduced by about 80% from 0.066′′ to 0.012′′. The reductionis very uniform across the entire field. Figure 6 shows the root-mean-square wavefront error inthe 19 guide regions as reconstructed from the recordings and attributed to local focus and localastigmatism. Due to the lack of an absolute guide-region tilt reference in the recorded wavefrontsensor data, the portion of the local tip-tilt error is not considered here. The mean error of allguide directions was reduced by 62% from 1.73 rad to 0.67 rad, however, significant static aber-rations remained in some guide regions. Figure 7, which plots the temporal standard deviation
4
Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes

Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes

Temporal standard deviation of wavefront modes in the guide directions
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
units: radiantst1, t2: tip-tilt f: focus a1,a2: astigmatism
no compensationtip-tilt modeMCAO mode
guide direction 1
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 2
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 3
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 4
t1 t2 f a1 a2
guide direction 5
t1 t2 f a1 a2
guide direction 6
t1 t2 f a1 a2
guide direction 7
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 8
t1 t2 f a1 a2
0
0.5
1
1.5
2
2.5guide direction 9
t1 t2 f a1 a2
0
0.5
1
1.5
2
2.5guide direction 10
t1 t2 f a1 a2
0
0.5
1
1.5
2
2.5guide direction 11
t1 t2 f a1 a2
0
0.5
1
1.5
2
2.5guide direction 12
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 13
t1 t2 f a1 a2
guide direction 140
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 15
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 16
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 17
0
0.5
1
1.5
2
2.5
t1 t2 f a1 a2
guide direction 18
t1 t2 f a1 a2
guide direction 19
Fig
.7.Tem
poralstandarddeviation
oftip-tilt,focus
andastigm
atismin
theguide
directionsof
them
ulti-dir
wavefrontsensor
with
variousA
Ocontrolm
odescom
pensatingfor
cooktopturbulence.
Refe
ren
ces
1.D
.S
chmidt,
Setu
pand
Chara
cterizatio
nof
the
Multi-C
onju
gate
Adaptive
Optics
System
for
the
Sola
rTelesco
pe
GR
EG
OR
.P
hDthesis,A
lbert-Ludw
igs-UniversitätF
reiburg,2012.2.
D.
Schm
idt,T.
Berkefeld,
F.H
eidecke,O
.von
derL
ühe,and
D.
Soltau,
“Testbedfor
them
ulti-conjugateadaptive
opticssystem
ofthe
solartelescope
GR
EG
OR
,”in
Astro
nom
ical
and
Space
Optica
lSystem
s,vol.7439of
Pro
c.SP
IE,A
ug.2009.
6
Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes

3. D. Schmidt, T. Berkefeld, B. Feger, and F. Heidecke, “Latest achievements of the MCAOtestbed for the GREGOR Solar Telescope,” in Adaptive Optics Systems II, vol. 7736 ofProc. SPIE, July 2010.
4. D. Schmidt, T. Berkefeld, and F. Heidecke, “The 2012 status of the MCAO testbed for theGREGOR solar telescope,” in Adaptive Optics Systems III, vol. 8447 of Proc. SPIE, July2012.
5. T. Rimmele and J. Marino, “Solar adaptive optics,” Living Reviews in Solar Physics, vol. 8,no. 2, 2011.
6. T. Berkefeld, D. Schmidt, D. Soltau, O. von der Lühe, and F. Heidecke, “The GREGORadaptive optics system,” Astronomische Nachrichten, vol. 333, p. 863, Nov. 2012.
7. T. Berkefeld, D. Soltau, D. Schmidt, and O. von der Lühe, “Adaptive optics developmentat the German solar telescopes,” Applied Optics, vol. 49, p. G155, Sept. 2010.
8. T. Berkefeld, W. Schmidt, D. Soltau, A. Bell, H. P. Doerr, B. Feger, R. Friedlein, K. Ger-ber, F. Heidecke, T. Kentischer, O. von der Lühe, M. Sigwarth, E. Wälde, P. Barthol,W. Deutsch, A. Gandorfer, D. Germerott, B. Grauf, R. Meller, A. Álvarez-Herrero,M. Knölker, V. Martínez Pillet, S. K. Solanki, and A. M. Title, “The Wave-Front Cor-rection System for the Sunrise Balloon-Borne Solar Observatory,” Solar Physics, vol. 268,pp. 103–123, Jan. 2011.
9. T. Berkefeld, D. Soltau, and O. von der Lühe, “Results of the multi-conjugate adaptiveoptics system at the German solar telescope, Tenerife,” in Astronomical Adaptive Optics
Systems and Applications II, vol. 5903, pp. 219–226, Aug. 2005.10. G. Taylor, T. Rimmele, J. Marino, and R. McAteer, “An Off-Limb Solar Adaptive Optics
System,” in Solar Physics and Space Weather Instrumentation V, vol. 8862 of Proc. SPIE,2013.
7
Third AO4ELT Conference - Adaptive Optics for Extremely Large Telescopes








![Adaptive optics for lOOm class telescopes: new challenges ...robertoragazzoni.it/Repository/[PAPERS-CONF]C085-1076_1.pdfAdaptive Optics'4 (MCAO) systems. The MCAO is based on a 3-D](https://img.dokumen.tips/doc/110x75/5f7d7d1f3379e44fda087c89/adaptive-optics-for-loom-class-telescopes-new-challenges-papers-confc085-10761pdf.jpg)