Embed Size (px)
Citation preview
Ćwiczenie
Komputerowy system zbierania i przetwarzania danych
pomiarowych.
Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z komputerowym systemem zbierania danych pomiarowych oraz z możliwościami przetwarzania tych danych.
Teoretyczne podstawy pomiaru.
Szybki rozwój systemów pomiarowych związany jest z dynamicznym rozwojem tech-niki komputerowej, szczególnie z powstaniem tzw. komputerów osobistych. Ze względu na ich uniwersalność, elastyczność, otwartą architekturę, niski koszt, dostępność i duże możli-wości postanowiono wykorzystać je jako jednostki sterujące, zapewniające prawidłowy obieg informacji w systemie pomiarowym i czasową koordynację pracy poszczególnych jego ele-mentów.
W komputerowym systemie pomiarowym poszczególne przyrządy pomiarowe połą-czone są z kontrolerem za pomocą systemu interfejsu, organizującego wymianę informacji między elementami tego systemu. Co prawda podstawowym blokiem systemu pomiarowego jest komputer, ale głównym elementem, wokół którego zbudowany jest system stał się inter-fejs systemu. Powstało kilkanaście standardów interfejsów, które znalazły zastosowanie w syste-mach pomiarowych, m.in.: RS-232C, USB, RS-422, RS-485, CAMAC, IEC-625(IEEE-488), VME. Na wstępie omówiony zostanie stosowany w prostych systemach pomiarowych, składających się z kontrolera i przyrządu bądź czujnika, interfejs szeregowy RS-232C oraz najbardziej po-pularny opracowany w 1978r. interfejs IEEE-488(europejska wersja tego interfejsu nosi na-zwę IEC-625). Główny obszar zastosowań tego standardu stanowią systemy badawcze i labo-ratoryjne, a także wybrane systemy przemysłowe. Interfejs ten umożliwia łączenie przyrzą-dów pomiarowych, sterujących i pomocniczych z komputerem nadzorującym pracę systemu. Interfejs RS-232C zaliczany jest do interfejsów szeregowych. Stosowana jest w nim transmisja szeregowa, która jest najtańszą, ale i najwolniejszą metodą przesyłania danych między urządzeniami. Podstawową zaletą transmisji szeregowej jest możliwość stosowania tanich kabli o bardzo małej liczbie przewodów(dwa lub trzy), co pozwala na budowę systemów rozłożonych na dużej przestrzeni. Standard RS-232 został określony w 1962 roku, a w 1969 ustalono jego poprawioną wersję RS-232C. Zdefiniowany on został w zleceniach organizacji CCITT (Comite Consultatif In-ternational des Telegraphes et Telephones) składających się z dwóch dokumentów: V.24 za-wierającego definicję obwodów połączeniowych i V.28 zawierającego parametry elektryczne tych obwodów. Standard RS-232C określa sposób połączenia urządzeń w celu szeregowego przesyłania da-nych(rys 1).

Rys. 1. Struktura układu transmisyjnego z interfejsem RS-232C. Ogólna struktura układu transmisyjnego z interfejsem RS-232C (rys.1.) składa się
z dwóch urządzeń końcowych dla danych DTE (Data Terminal Equipment) np. komputerów, połączonych kanałem teletransmisji. Ponieważ bezpośrednie połączenie urządzeń DTE z kanałem teletransmisji jest niemożliwe, wykorzystuje się dodatkowe urządzenia komunika-cyjne dla danych DCE (Data Communication Equipment), np. modemy telefoniczne, połą-czone z urządzeniami DTE łączem RS-232C.
Do połączenia urządzenia DTE z łączem RS-232C wykorzystuje się 25-stykowe lub 9-stykowe gniazdo typu Cannon oraz odpowiednią liczbę linii przesyłowych. Spośród linii zdefiniowanych przez protokół V.24 zwykle wykorzystuje się tylko kilka, w zależności od potrzeb. Opis wyprowadzeń na złączach 25- i 9- stykowych przedstawiono w tabeli 1.
Tabela 1. Opis wyprowadzeń na złączu interfejsu RS232C
Numer wyprowadzenia w złączu
25-styk. 9-styk.
Nazwa Obwodu Zgodnie
z RS-232C
Najczęściej używane oznaczenia wraz określeniem
Zgodnym z PN-75/T-0502
1 AA PG (Masa ochronna) 2 3 BA TxD (Dane nadawane) 3 2 BB RxD (Dane odbierane) 4 7 CA RTS (Żądanie nadawania) 5 8 CB CTS (Gotowość do nadawania) 6 6 CC DSR (Gotowość DCE) 7 5 AB SG (Masa sygnałowa) 8 1 CF DCD, RLSD (Poziom sygnału odbierającego) 9 - Zarezerwowane dla celów dydaktycznych 10 - Zarezerwowane dla celów diagnostycznych 11 Nie wykorzystany 12 SCF SRLSD (Poziom sygnału odbieranego w kan. pow) 13 SCB SCTS (gotowość kanału powrotnego) 14 SBA STxD (Dane nadawane w kanale powrotnym) 15 DB Podstawa czasu z DCE dla element. nadawanych 16 SBB SRxD (Dane odbierane w kanale powrotnym) 17 DD Elementowa podstawa czasu wytwarzana w DCE 18 Nie wykorzystany 19 SCA SRTS (Żądanie nadawania w kanale powrotnym) 20 4 CD DTR (Gotowość DTE) 21 CG Jakość sygnału odbieranego 22 9 CE RI (Wskaźnik wywołania) 23 CH/CI Wybór szybkości transmisji przez DTE 24 DA Podstawa czasu z DTE dla element. nadawanych 25 Nie wykorzystany
kanał
teletransmisji RS-232C RS-232C
łącze łącze DTE DCE DCE DTE

Przy połączeniu dwóch urządzeń DTE bez pośrednictwa urządzeń DCE stosowane jest tzw. połączenie NULL MODEM ( modem zerowy). Polega ono na skrzyżowaniu linii trans-misji danych RxD i TxD. W przypadku, gdy wykorzystywane są sygnały sterujące stosuje się również skrzyżowanie linii DTR i DSR. Linię RTS zapętla się do wejścia CTS i jednocześnie łączy z linią DCD drugiego urządzenia.
Najczęściej stosowanym sposobem transmisji przy wykorzystywaniu tego interfejsu jest transmisja asynchroniczna(nie sterowana sygnałem zegarowym) zwana czasem start-stopową. W transmisji tej słowa w postaci ciągów bitów przesyłane są asynchronicznie, jeden za dru-gim, z czasem trwania wynikającym z prędkości transmisji.
Na liniach danych (TxD, RxD) obowiązuje logika ujemna, tzn. jedynce logicznej od-powiada stan niski, a na pozostałych liniach (sterujące, synchronizacji i masy) obowiązuje logika dodatnia. Stanowi niskiemu odpowiada napięcie o wartości –15…-3V, a wysokiemu 3…15V.
Przesyłanie danych rozpoczyna się bitem startu. Po pojawieniu się jego narastającego zbocza odbiornik odczytuje stany wszystkich spodziewanych bitów danego słowa. Po tym bicie przesyłanych jest od 5 do 8 bitów danych, a po nim może być przesyłany bit kontrolny. Przesył kończy się przesłaniem jednego lub dwóch bitów stopu. Po odebraniu bitów stopu odbiornik gotowy jest do odebrania kolejnego słowa. Format przykładowego słowa przedsta-wia rys. 2.
Rys. 2. Format jednostki informacyjnej.
Dla prawidłowego odbioru informacji nadajnik i odbiornik muszą pracować z tą samą szybkością. Odbiornik musi znać również format przesyłanego słowa, tzn. liczbę bitów da-nych, występowanie i znaczenie bitu kontrolnego (even parity – kontrola parzystości lub odd parity – kontrola nieparzystości) oraz liczbę bitów stopu.
Maksymalna prędkość transmisji zależy od długości połączeń i pojemności elektrycz-nej obciążającej źródło sygnału (CLmax= 2500pF) i z reguły nie przekracza 20 kbodów. Dłu-gość kabla łączącego dwa dowolne urządzenia nie powinna przekraczać 15m. Wydłużenie toru transmisji zwiększa wrażliwość na zakłócenia, stwarzając niebezpieczeństwo wzrostu liczby błędów transmisji danych. Ponadto potencjały uziemień urządzeń znajdujących się w dużej odległości od siebie mogą znacznie się różnić. Powstałe w ten sposób napięcie może dodatkowo zakłócać współpracę urządzeń, a także prowadzić do ich uszkodzeń.
Zwiększenie zasięgu interfejsu RS-232C umożliwia zastosowanie tzw. „pętli prądowej 20 mA” ( ang. 20 mA loop). Interfejs pętli prądowej, poza zwiększeniem zasięgu, zapewnia dzięki separacji galwanicznej zrealizowanej za pomocą transoptora ochronę przed wzajem-nym uszkodzeniem połączonych urządzeń przemysłowych oraz sprzętu komputerowego.
Bit parzystości
1 lub2 bity stopu
Stop
Kontrola Pole danych Start
Koniec Początek
Bit startu

2T
W interfejsie pętli prądowej pozostawiono tylko dwie pary przewodów dla transmisji (TxD) i odbioru (RxD) danych, rezygnując ze wszystkich sygnałów kontrolnych określonych w protokole RS-232C. Format danych ma taką samą postać jak w asynchronicznym łączu RS-232C przeznaczonym do transmisji znakowej. Przyjęto, że „1” reprezentuje tu przepływ prądu 20 mA, „0”- brak przepływu prądu. Przykład realizacji obwodu pętli prądowej przedstawiono na rys.3.
Rys. 3.Galwaniczna separacja w obwodzie pętli prądowej zrealizowana za pomocą transoptora.
Układy pętli prądowej mogą być umieszczone wewnątrz standardowych obudów DB25 lub DB9, co zapewnia wygodę użytkowania i odporność mechaniczną. Wartości zwiększonego zasięgu interfejsu z pętlą prądową zależą od realizacji technicznej pętli oraz od szybkości transmisji i przykładowo wynosi 4000m przy szybkości 9600bit/s. W przypadku gdy wymagana jest większa odporność na zakłócenia, można zastosować inny interfejs szere-gowy. Do popularniejszych należą : RS-422A, RS-423A i RS-485. Stosowana jest w nich organizacja logiczna przesyłanych znaków, taka jak w RS-232C, różnią się natomiast realiza-cją obwodów interfejsu i parametrami elektrycznymi.
Standard IEC-625 jest obecnie najpopularniejszym standardem interfejsu, umożliwia-jącym sprzęganie aparatury kontrolno-pomiarowej i informatycznej w system pomiarowy. Ze względu na prostotę i elastyczność system rozpowszechnił się i został znormalizowany przez IEEE (Institute of Electrical and Electronic Engineers) w roku 1978 jako IEEE 488. Standard ten znany jest również pod nazwą GPIB (General Purpose Interface Bus). W Polsce znany jest pod nazwą IEC-625 ( International Electrotechnical Commission).
RxD
3R
+5V
Pętla prądowa 20 mA +12V
1RTxD
2R
1T
TTL
Część nadawcza
TTL
Część odbiorcza
Posiada on następujące cechy: - urządzenia systemu są dołączane do magistrali cyfrowej równolegle, dzięki czemu sys-
tem jest otwarty i elastyczny strukturalnie, - urządzenia różnych producentów wyposażone w interfejs IEC-625 mogą być dołączane
do magistrali bez przeróbek technicznych, - przesyłanie informacji w postaci bajtów odbywa się asynchronicznie, ze zwrotnym po-
twierdzeniem odbioru, - możliwa jest budowa systemów pomiarowych bez kontrolera, z jednym lub wieloma kon-
trolerami. W przypadku budowy systemu z więcej niż jednym kontrolerem, w danej chwili tylko jeden może być aktywny.
Struktura interfejsu opiera się na konfiguracji magistralowej, którą przesyłane są komu-
nikaty interfejsowe (adresy i rozkazy) oraz komunikaty urządzeń (dane). Magistrala składa się z 16 linii sygnałowych (8 linii danych, 3 linie synchronizacji, 5 linii sterowania) oraz 9 linii masy. Na magistrali obowiązuje logika ujemna, tzn. stan niski L odpowiada jedynce logicznej („1”), stan wysoki – zeru logicznemu („0”). Do magistrali cyfrowej IEC-625 może być jedno-cześnie dołączonych najwyżej 15 urządzeń. Długość kabla między dwoma dowolnymi przy-rządami nie powinna przekroczyć 2m, zaś całkowita długość wszystkich kabli 20m. Informa-cje mogą być przesyłane z szybkością 250-500 kb/s a nawet 1000 kb/s przy dwukrotnym skróceniu kabli. Dla umożliwienia dołączenia kolejnych przyrządów do dowolnego miejsca magistrali wszystkie kable łączące współpracujące urządzenia powinny być obustronnie za-kończone złączami posiadającymi w jednej obudowie wtyk i gniazdo. W obowiązującym w Polsce standardzie IEC-625 stosuje się 25-stykowe złącza szufladowe Cannon. W USA zgodnie z IEEE-488 stosowane są 24-stykowe złącza bocznokontaktowe Amphenol.
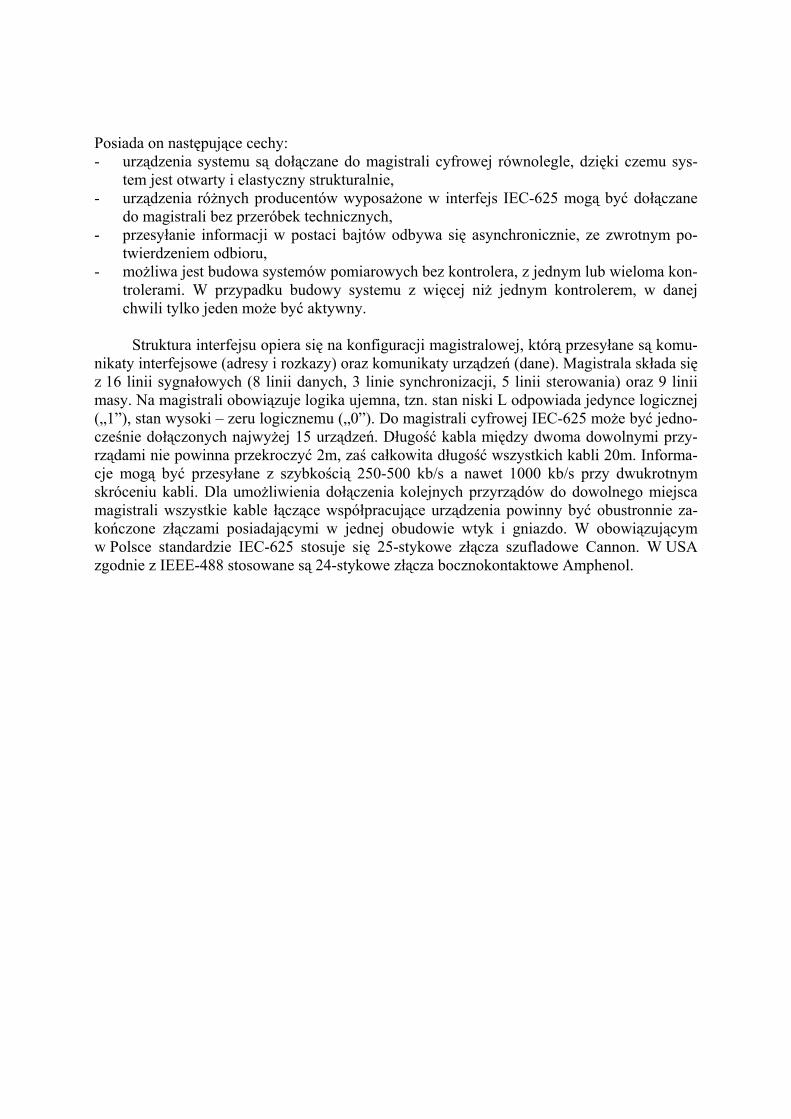
Przepływ informacji odbywa się między urządzeniami systemu, które kwalifikuje się jako nadajnik (N), odbiornik (O) i kontrolery (K). Ilustruje to rys.4.
Linie magistrali IEC-625
Rys.4.Struktura magistrali IEC-625. Linie przesyłania danych DIO (Data Input-Output) – stanowi je 8 linii służących do szeregowego przesyłania bajtów. Transmisja odbywa się asynchronicznie, dwukierunkowo z potwierdzeniem odbioru pojawiającym się na liniach kontroli współpracy. W zależności od stanu linii sterowania ATN, po liniach DIO przesyłane są dane pomiarowe (wyniki pomiarów, dane programujące przyrządy itp.) lub instrukcje organizujące pracę systemu (rozkazy, adre-sy). Informacje na liniach DIO przesyłane są w kodzie ISO-7, którego 7 bitów informacji uzupełnione jest bitem parzystości.
Linie sterowania – stanowi je 8 linii, które można podzielić na dwie grupy:
- 5 linii sterowania interfejsów (ATN, IFC, REN, SRQ, EOI) służących do kierowania pra-widłowym przepływem informacji w interfejsie,
- 3 linie do kontroli transmisji (DAV, NRFD, NDAC) służące do sterowania transmisją każdego bajtu danych na liniach DIO, z nadajnika lub kontrolera do jednego lub kilku od-biorników. Grupa tych trzech linii umożliwia asynchroniczne przesyłanie informacji ze zwrotnym potwierdzeniem odbioru.
Głównym zadaniem magistrali IEC-625 jest przesyłanie informacji pomiędzy dwoma
lub więcej urządzeniami. Przed rozpoczęciem przesyłania kontroler wyznacza, przez wysłanie odpowiednich adresów, jedno urządzenie jako nadawcę oraz jedno lub więcej urządzeń jako
Odbiorca np. drukarka
Nadawca np. klawiatura
Nadawca/Odbiorca np. woltomierz
Kontroler Nadawca/Odbiorca np. IBM PC
do innych urządzeń
magistrala IEC-625
magistrala danych
magistrala synchronizacji
magistrala sterowania
DIO1...8
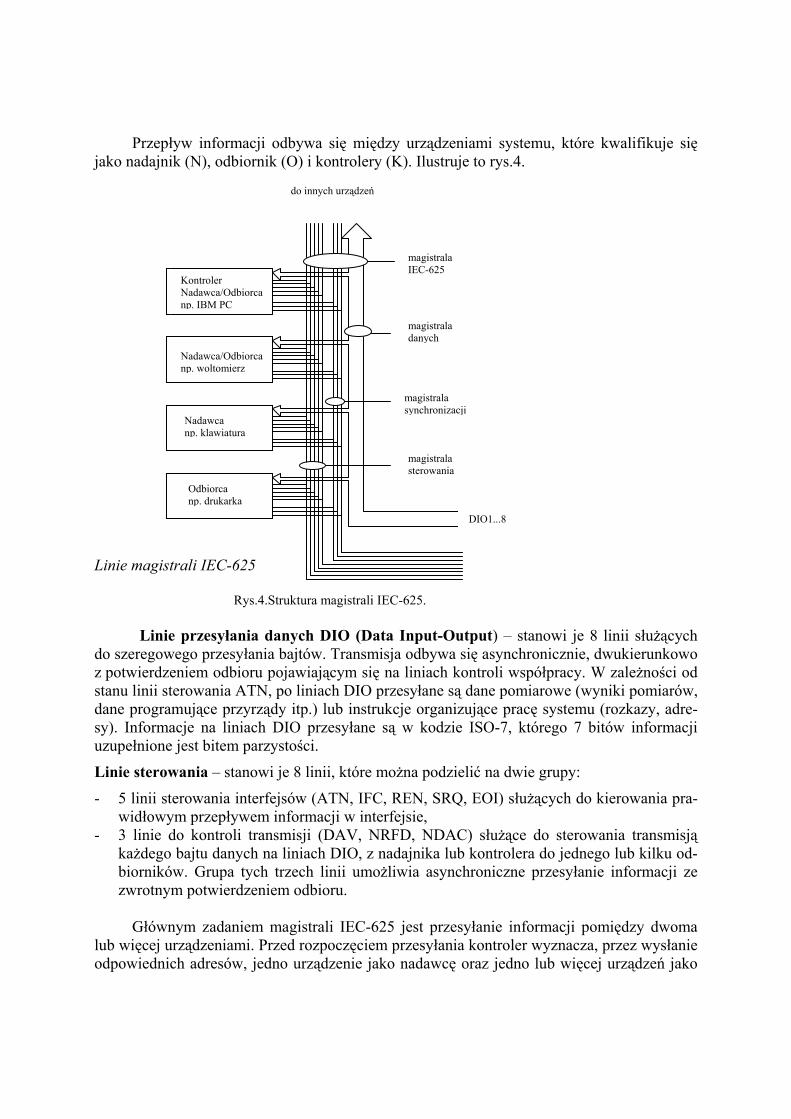
odbiorcy. Adresy urządzeń ustala użytkownik w czasie podłączania ich do magistrali interfej-su. Do tego celu służy zwykle pięć przełączników, za pomocą których ustawia się 5-bitowy adres. Na rys.5. przedstawiono schemat blokowy typowego systemu pomiarowego.
Rys.5. Schemat blokowy typowego systemu pomiarowego: a – adresy, rozkazy, wyniki pomiarów, b – wyniki pomiarów, c – adresy, rozkazy, wyniki pomiarów, W systemie tym kontroler programuje urządzenia i inicjuje pomiary; wyniki pomiarów przesyłane są do kontrolera systemu. Dane przesyłane do komputera jednym z przedstawionych interfejsów podlegają w nim przetworzeniu. W zależności od rodzaju wielkości mierzonej oraz od potrzeb mierzącego wy-prowadzane na zewnątrz mogą być wyniki końcowe zarówno w postaci cyfrowej, jak i analo-gowej, jak również interesujące mierzącego inne wyniki obliczeń pośrednich. Przebieg procesu przetwarzania wyników pomiarów w komputerze musi być dopasowany do dynamicznych warunków pracy całego systemu pomiarowego. Przetwarzanie danych w systemie czasu rzeczywistego możliwe jest tylko w bardzo wolnych procesach nie wyma-gających częstego próbkowania. Wyniki pomiarów procesów szybkich są zapamiętywane i przetwarzane pośrednio w trybie off-line.
Magistrala IEC-625
Kontroler Generator Zasilacz prądu stałego
Cyfrowy multimetr
Częstościo- mierz
Drukarka
Badany obiekt
Częstotliwość Stałe i zmienne napięcie
Napięcie stałe
Napięcie zmienne i częstotliwość
a a ba
ba
ca b

USB (Universal Serial Bus)
Różnorodność współczesnych urządzeń peryferyjnych wiąże się z różnymi wymaga-niami komunikacyjnymi przez nie oczekiwanymi. Jedne wymieniają z terminalem niewielkie ilości danych i akceptują niewielką szybkość przesyłu, inne natomiast przesyłają bardzo duże pliki i oczekują bardzo szybkiej transmisji.
Jeszcze do niedawna pierwsza grupę urządzeń wyposażano w asynchroniczny interfejs szeregowy RS-232C, drukarkę podłączano do portu równoległego (LPT) natomiast urządze-nia specjalizowane wymagały dedykowanych kontrolerów wejścia –wyjścia i im przypisa-nych kontrolerów (sterowników). Ponieważ wraz ze wzrostem liczby urządzeń peryferyjnych rosła liczba różnych interfejsów postanowiono opracować nowy rodzaj łącza komunikacyjne-go wolnego od utrudnień, jakie sprawiały istniejące. Takim rozwiązanie stał się uniwersalny interfejs szeregowy USB (Universal Serial Bus) zastępujący wiele tradycyjnych portów stan-dardowych i specjalizowanych.
Tabela 2. Opis wyprowadzeń na złączu USB
Numer wyprowadzenia Nazwa sygnału Opis Kolor przewodu
1 VCC lub VDC zasilanie +5 V (maks. 0,5 A) czerwony 2 D– transmisja danych D- biały lub żółty 3 D+ transmisja danych D+ zielony 4 GND masa czarny
Do podstawowych właściwości interfejsu USB należy zaliczyć:
- możliwość podłączenia dużej liczby urządzeń (do 127), - automatyczne wykrywanie włączenia urządzenia do systemu, - automatyczna konfiguracja, - szybka transmisja, - zasilanie urządzeń bezpośrednio z portu.
USB w zależności od standardu umożliwia transmisję z różnymi szybkościami:
- USB 1.0, mała szybkość (Low-Speed) – 1.5 Mb/s (0.1875 MB/s), - USB 1.1, pełna szybkość (Full-Speed) – 12 Mb/s (1.5 MB/s), - USB 2.0, wysoka szybkość (Hi-Speed) – 480 Mb/s (60 MB/s), - USB 3.0, super szybkość (Super-Speed) – 4,8 Gb/s (600 MB/s).
Wtyczka USB typu A Wtyczka USB typu B
Trzecia generacja standardu Universal Serial Bus umożliwi transfery z prędkością 4,8 Gb/s, a więc dziesięć razy szybciej niż 480 Mb/s oferowane przez USB 2.0. Standard bę-dzie kompatybilny wstecz, a więc bez problemu będzie obsługiwał urządzenia USB 2.0 i USB 1.1. Pierwsze urządzenia pracujące w standardzie USB 3.0 powinny pojawić się na początku 2009 roku.
Oznaczenia standardów USB
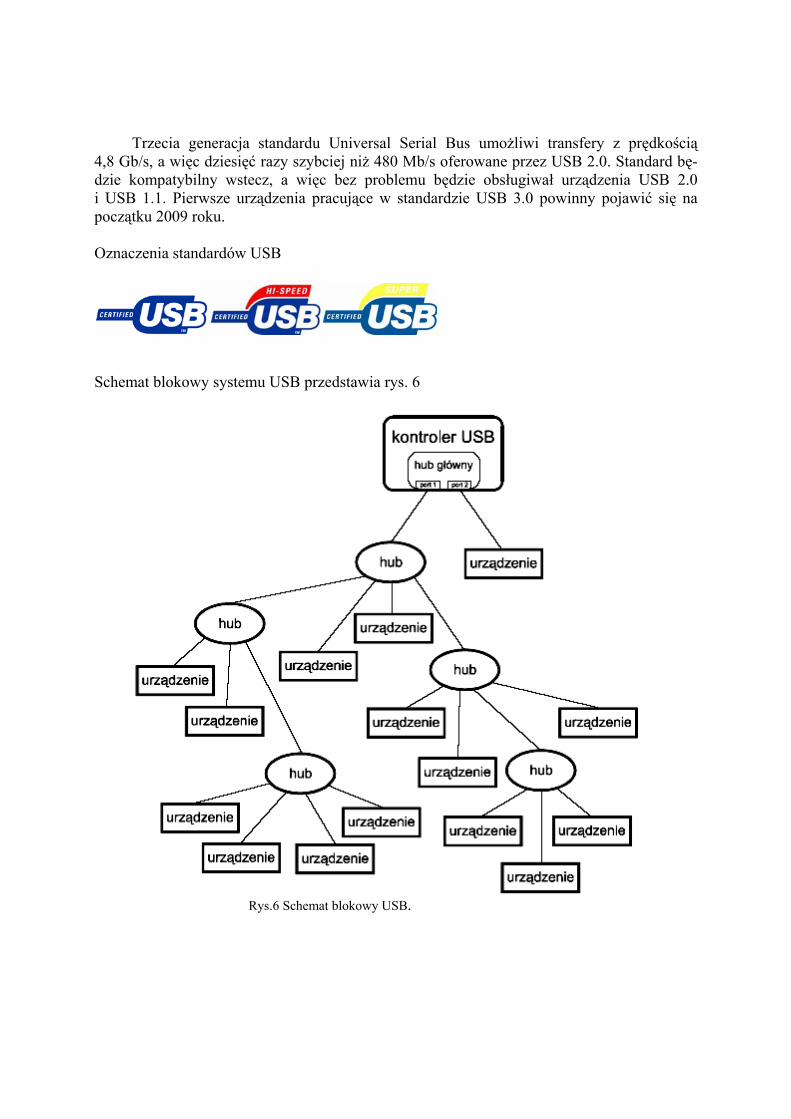
Schemat blokowy systemu USB przedstawia rys. 6
Rys.6 Schemat blokowy USB.
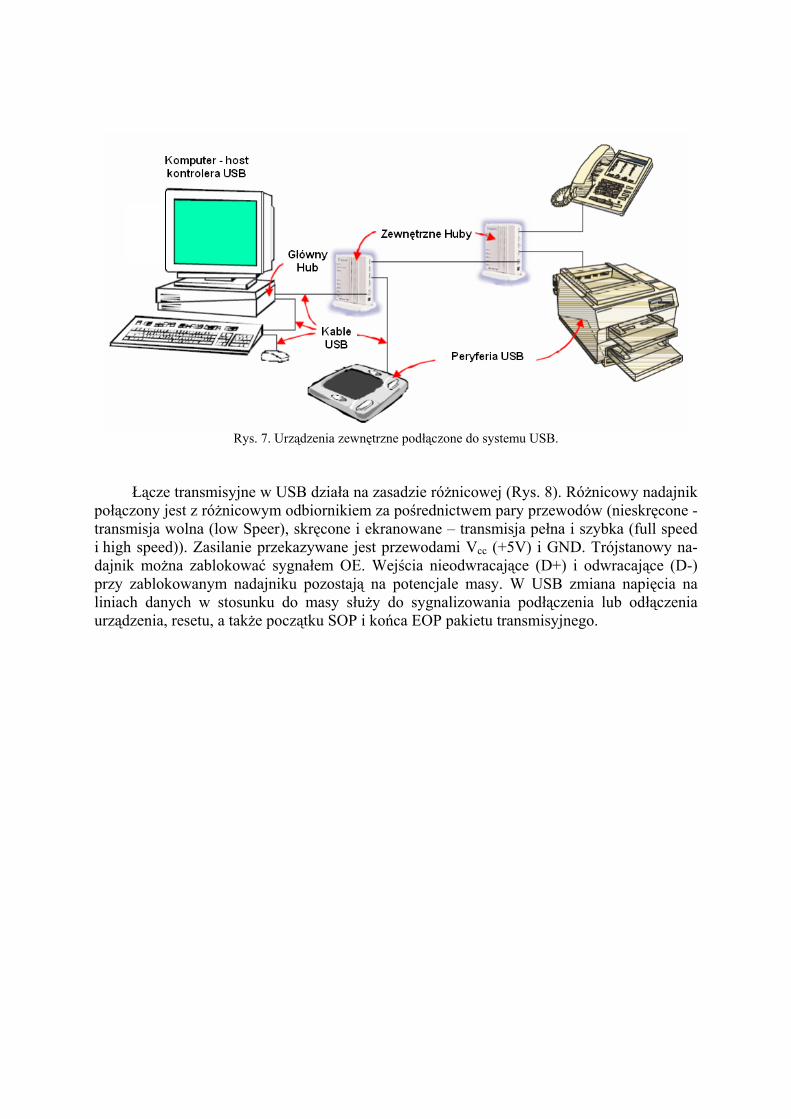
Rys. 7. Urządzenia zewnętrzne podłączone do systemu USB.
Łącze transmisyjne w USB działa na zasadzie różnicowej (Rys. 8). Różnicowy nadajnik połączony jest z różnicowym odbiornikiem za pośrednictwem pary przewodów (nieskręcone - transmisja wolna (low Speer), skręcone i ekranowane – transmisja pełna i szybka (full speed i high speed)). Zasilanie przekazywane jest przewodami Vcc (+5V) i GND. Trójstanowy na-dajnik można zablokować sygnałem OE. Wejścia nieodwracające (D+) i odwracające (D-) przy zablokowanym nadajniku pozostają na potencjale masy. W USB zmiana napięcia na liniach danych w stosunku do masy służy do sygnalizowania podłączenia lub odłączenia urządzenia, resetu, a także początku SOP i końca EOP pakietu transmisyjnego.

Rys.8 Obwód transmisyjny w standardzie USB.
Do kodowania w systemie USB przyjęto kodowanie NRZI (Non Return to Zero Inver-
ted) z uzupełnienie dodatkowymi bitami synchronizującymi. Na początku każdego bitu o war-tości logicznej 0 następuje zmiana stanu sygnału, natomiast po każdych 6 kolejnych bitach o wartości 1 wstawiany jest dodatkowy bit o wartości 0. Takie kodowanie umożliwia poprawne odkodowanie bitów w sygnale odebranym bez konieczności przesyłania sygnału zegarowego. Po rozpoznaniu bitów sygnału odebranego usuwane są bity dodatkowe. Sposób kodowania przedstawia rys. 9.
Rys. 9. Kodowanie NRZI z dodatkowymi bitami synchronizacji.
2 Przebieg ćwiczenia 2.1. Komputerowy system zbierania i przetwarzania danych pomiarowych
Układ pomiarowy
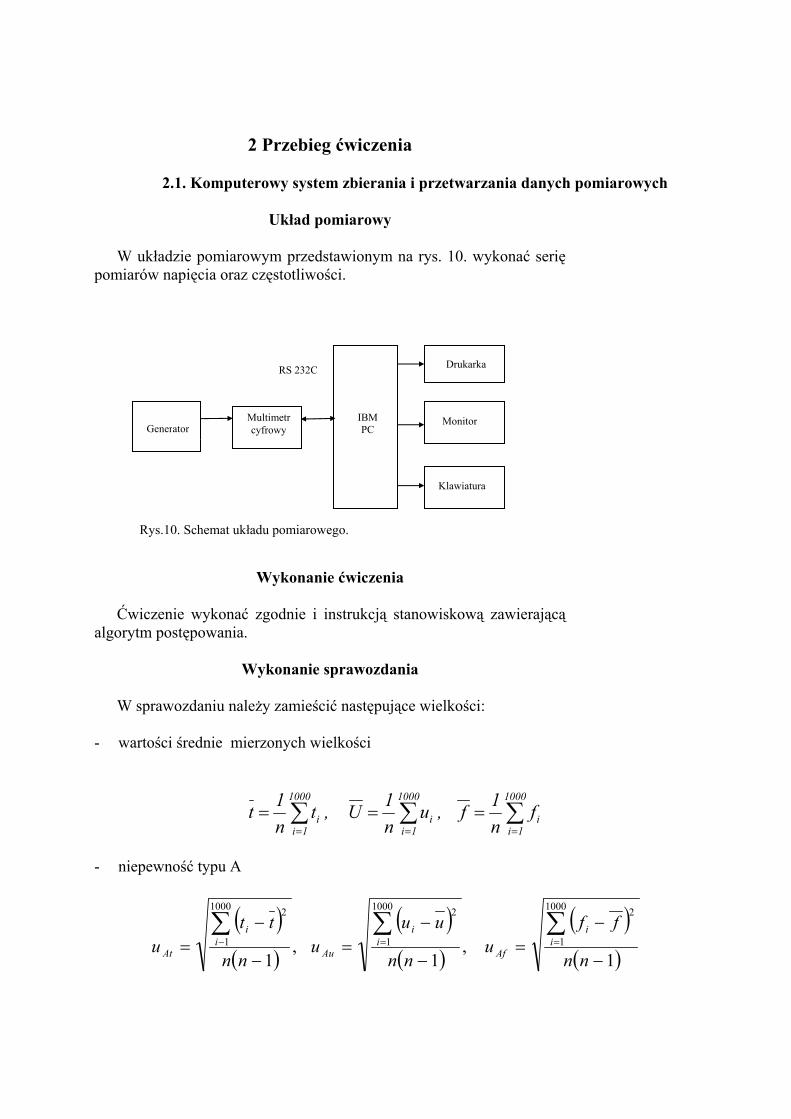
W układzie pomiarowym przedstawionym na rys. 10. wykonać serię pomiarów napięcia oraz częstotliwości. Rys.10. Schemat układu pomiarowego.
Wykonanie ćwiczenia
Ćwiczenie wykonać zgodnie i instrukcją stanowiskową zawierającą algorytm postępowania.
Wykonanie sprawozdania
W sprawozdaniu należy zamieścić następujące wielkości: - wartości średnie mierzonych wielkości
∑∑∑===
===1000
1ii
1000
1ii
1000
1ii f
n1f,u
n1U,t
n1t
- niepewność typu A
( )( )
( )( )
( )( )1
,1
,1
1000
1
21000
1
21000
1
2
−
−=
−
−=
−
−=
∑∑∑==−
nn
ffu
nn
uuu
nn
ttu i
i
Afi
i
Aui
i
At
Generator Multimetr cyfrowy
RS 232C
IBM PC
Drukarka
Monitor
Klawiatura

- niepewność typu B
3,
3,
3grf
Bfgru
Bugrt
Bt uuu∆
=∆
=∆
=
- niepewność łączną
222222 ,, BfAffBuAuuBtAtt uuuuuuuuu +=+=+= τττ
- niepewność rozszerzoną
ffuutt ukUukUukU τττ ⋅=⋅=⋅= ,,
Należy zamieścić również wykresy widoczne w arkuszu kalkulacyjnym przedstawiające wyniki pomiarów napięcia, częstotliwości oraz temperatury z naniesioną wartością średnią mierzonej wartości oraz przedziałami niepewności rozszerzonej i we wnioskach odpowiednio to skomentować.
3. Uwagi o wynikach pomiaru i wnioski
4. Pytania kontrolne i zagadnienia
1. Rodzaje transmisji danych cyfrowych (asynchroniczna, synchronicz-na, szeregowa, równoległa).
2. Interfejs RS 232C. 3. Połączenie modem zerowy (NULL MODEM). 4. Interfejs z pętlą prądową 20 mA. 5. Budowa i właściwości interfejsu IEC 625. 6. Budowa i właściwości interfejsu USB. 7. Przetwarzanie danych pomiarowych w trybie on-line i off-line.
5. Literatura
[1] Link W. : Jak mierzyć, sterować i regulować za pomocą Basicu. WNT W-wa 1988r.
[2] Lober CH. Will G.: Mikrpkomputer w technice pomiarowej. WKŁ W-wa 1989r.
[3] Mielczarek W.: Szeregowe interfejsy cyfrowe. Helion 1993r.

[4] Mielczarek W.: USB. Uniwersalny interfejs szeregowy. Helion 2005r.
[4] Świsulski D.: Laboratorium z systemów pomiarowych. Wyd. Pol. Gd. Gdańsk 1998r.
[5] Winiecki W.: Organizacja komputerowych systemów pomiarowych. Ofic. Wyd. Pol. Warsz. W-wa 1997r.
[6] Systemy pomiarowe – laboratorium. Wyd. Pol. Warsz. W-wa 1988r.





























