Embed Size (px)
Citation preview

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
519
Mat. Symp. str. 519 – 531
Jerzy KORNOWSKI Główny Instytut Górnictwa, Katowice
Równania emisji sejsmoakustycznej i ich zastosowanie
Streszczenie
W pracy przedstawiono tak zwane sejsmoakustyczne równania stanu – składające się
z równań ewolucji emisji i z równań obserwacji – opisujące emisję sejsmoakustyczną ze ściany skrawanej kombajnem i obserwowanej czujnikami sieci sejsmoakustycznej oraz sieci dyspozytorskiej. W chwilach tq = qT – gdzie T jest przyjętą jednostką czasu (godzina, kwadrans, itp.) natomiast q = 1, ..., K gdzie K to czas skrawu w jednostkach T – otrzymywane są (i wykorzystywane mogą być np. do oceny i prognozy zagrożenia) informacje o aktywności i „umownej” energii emisji oraz o położeniu lub prędkości kombajnu. Informacja ta umożliwia rozwiązywanie równań stanu. Sekwencyjne (co jednostkę T) rozwiązywanie równań stanu (m.in.) umożliwia estymację względnego (mierzonego względem poziomu odniesienia) naprężenia lub estymację zmian wielkości proporcjonalnej do naprężenia w kolejnych segmentach ściany wzdłuż skrawanego ociosu.
Równania stanu są ważne zarówno w teorii (umożliwiając optymalną estymację za pomocą
tak zwanego filtru Kalmana) jak i w praktyce, umożliwiając – mimo braku lokalizacji źródeł –
estymację stanu z rozdzielczością znacznie lepszą niż było to dotąd możliwe.
1. Wprowadzenie
Celem tej pracy jest przybliżenie Czytelnikowi tak zwanych sejsmoakustycznych równań
stanu (dalej: AESE) opisujących (m.in.) emisję sejsmoakustyczną (dalej: AE) – czyli
aktywność i energię – w skrawanej kombajnem ścianie. Przybliżoną formę AESE wyprowadził
i opisał Kornowski (2001, 2002a,b), a „dokładne” wyprowadzenia znaleźć można w pracy
Kornowskiego (2004a). Równania stanu są powszechnie znane i stosowane w teorii systemów
i sterowania (np. Ogata 1974), zawdzięczając swą popularność pracom Kalmana (1960) oraz
Kalmana i Bucy’ego (1961), gdzie wykazano ich użyteczność w zadaniu sekwencyjnej
(w czasie rzeczywistym) estymacji i prognozy.
Równania stanu (ang.: state equations, także: state-space equations) zwyczajowo składają
się z (być może wektorowo-macierzowych) równań ewolucji (stanów) – opisujących ewolucję
często bezpośrednio nie obserwowalnych zmiennych stanu (np. energii AE emitowanej
w źródłowym polu emisji) – i z równań obserwacji wiążących zmienne stanu z wielkościami
obserwowalnymi (np. z energią „umowną” na wyjściu systemu obserwacyjnego). Zmienne
stanu to wielkości fizyczne określające badane procesy (np. proces AE). W sejsmoakustyce
górniczej zmiennymi stanu mogą być (np.): aktywność N, czyli liczba zdarzeń w jednostce T
czasu i energia E generowana w polu emisji (którą odróżniać trzeba od energii Eobs „umownej”,
rejestrowanej na wyjściu systemu obserwacyjnego). Gdy AE wykorzystana ma być do oceny
i prognozy indukowanego zagrożenia sejsmicznego, do zmiennych stanu zaliczamy też C0,
wielkość proporcjonalną do naprężenia, lub VCf 0 , wielkość zwaną wymuszeniem (V jest

J. KORNOWSKI – Równania emisji sejsmoakustycznej i ich zastosowanie
____________________________________________________________________________
____________________________________________________________________________
520
to prędkość skrawania, naprężeniem nazywamy tu tą składową tensora, która lokalnie decyduje
o procesie pękania skały, zatem i o AE). Stanem może więc być (np.) jeden z trzech
wektorów: [N(t), f(t)], [E(t), f(t)], [N(t), E(t), f(t)].
By wyprowadzić AESE, wykorzystuje się model ciała lepko-sprężysto-kruchego (MRSK –
model reologiczny ze sprężysto-kruchym polem) zawierający stochastyczne „pole” (czyli
zbiór) elementów kruchych, które pod wpływem naprężenia rozciągającego (o wartości
przekraczającej wartość krytyczną danego elementu) mogą ulegać niszczeniu, generując
przemiany i przepływy energii, które interpretujemy jako AE. Dzięki temu każdy ciąg zdarzeń
AE jest realizacją stochastycznego procesu punktowego, lecz intensywność procesu (średnia
po realizacjach) jest dobrze zdefiniowaną, ciągłą funkcją czasu, zależną od naprężenia
i parametrów modelu. MRSK zawiera parametry deterministyczne (sprężystość, lepkość)
i stochastyczne (pole kruche). Modele nazywamy stochastycznie identycznymi gdy ich
parametry deterministyczne są identyczne, a parametry stochastyczne pochodzą z tego samego
rozkładu prawdopodobieństwa. Wykazano, że w przypadku małych odkształceń niesprę-
żystych, ogólnie nieliniowe równanie konstytutywne MRSK i jego odpowiedź na skok
wymuszenia mogą być aproksymowane równaniami znanego modelu ciała standardowego
(Zenera) i jego wykładniczo malejącą odpowiedzią )( t . Aproksymację tą oznaczamy dalej
skrótem SMAE (od ang.: standard model with AE). SMAE otwiera możliwość prostej
aproksymacji przebiegów AE w warunkach niewielkich odkształceń niesprężystych (co dla
górnika oznaczać może „stan niewielkiego zagrożenia sejsmicznego”).
AESE wyprowadza się zakładając, że skrawany kombajnem pokład składa się z elementów,
z których każdy może być aproksymowany modelem SMAE oraz – by nie komplikować
wyprowadzeń – że tylko przyociosowa, mogąca się swobodnie odkształcać, warstwa pokładu
jest źródłem AE (a warstwy leżące w głębi pozostają skrępowane do chwili aż znajdą się przy
ociosie). W ten sposób i naprężenie („przyłożone do pokładu”) i proces skrawania, łącznie
decydują o AE. Przyjęcie realistycznych założeń o sposobie obserwacji (okresowo, co T – np.
co godzinę – obserwuje się skumulowane w okresie o długości T, wartości Nt oraz obstE ,
a także położenie lub prędkość Vt kombajnu, przyczyny źródła AE nie są lokalizowane)
powoduje, że wyprowadzenia AESE są dość złożone i nie będą tu, z braku miejsca,
powtarzane. Wszystkie wyprowadzenia i uzasadnienia znaleźć można w pracy
Kornowskiego (2004a), tu przedstawiane są gotowe wyniki. Równanie ewolucji naprężeń C0t
nie jest wyprowadzane: z braku lepszej informacji apriorycznej ewolucję tą zwyczajowo
aproksymuje się jednowymiarowym ruchem Browna („błądzenie przypadkowe”), co w wielu
zastosowaniach zapewnia dobre wyniki. Dysponując lepszą informacją aprioryczną (np. o tym,
że czoło ściany zbliża się do krawędzi), użytkownik AESE wprowadzić może lepszą
aproksymację.
Gdy nie lokalizuje się źródeł AE, sformułowanie linowych równań obserwacji wymaga –
wspomnianego już – założenia, że AE generowana jest w przyociosowej warstwie pokładu.
Założenie to umożliwia linearyzację problemu pozwalając na zdefiniowanie transmitancji
(funkcji przejścia) pomiędzy rejonem źródeł a wyjściem systemu obserwującego.
AESE umożliwiają zastosowanie algorytmu zwanego filtrem Kalmana do optymalnej,
sekwencyjnej estymacji i prognozy zmiennych stanu. Wprowadzana przez AESE
dyskretyzacja czasu i przestrzeni umożliwia estymację i prognozę zmiennych stanu
w segmentach ściany mniejszych od tej ściany – mimo że obserwacje (bez lokalizacji AE)
dotyczą całości ściany. Są to zupełnie nowe zagadnienia i nowe możliwości sejsmoakustyki
górniczej. By ułatwić zapamiętanie akronimów, powtórzmy że:
AESE – to sejsmoakustyczne równania stanu;
MRSK – model reologiczny ze sprężysto-kruchym polem;

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
521
SMAE – to liniowy „model standardowy z emisją akustyczną” aproksymujący nieliniowy
MRSK
2. Założenia i oznaczenia
W rozdziale tym przedstawiono założenia ważne dla zrozumienia AESE, oraz stosowane
dalej oznaczenia.
Z 1: Ściana składa się z elementów aproksymowalnych stochastycznie identycznymi
modelami MRSK i występują w niej tylko niewielkie odkształcenia niesprężyste, co umożliwia
zastąpienie MRSK przez SMAE.
Z 2: Tylko SMAE sąsiadujące z powierzchnią swobodną generują AE. Elementy w głębi
ociosu pozostają skrępowane.
Z 3: Skrawający kombajn wyłącza (likwiduje) przyociosowe elementy/SMAE właśnie
urobione i jednocześnie włącza (do działania polegającego na generowaniu AE) nowe, właśnie
odsłonięte elementy/SMAE.
Z 4: Przestrzenny rozkład )y,x( naprężenia w ścianie jest funkcją zmiennych x oraz y
lecz w czasie (t) zmienia się bardzo powoli pozostając stały w okresie jednego skrawu. Postęp
ściany powoduje że [choć )y,x( nie zmienia się z upływem czasu] naprężenie na ociosie
(powoli) zmienia się z czasem nawet dla x=const. (patrz rys. 1).
Z 5: Ocios ściany ma stałą wysokość i stały jest zabiór bębna kombajnowego określający
dyskretyzację osi y.
Założenie Z 1 ma podstawowe znaczenie w tej pracy, Z 2 tylko ułatwia linearyzację. Z 3,
Z 4 i Z 5 przede wszystkim opisują sytuację, nie nakładając ważnych ograniczeń (gdy akceptu-
jemy „niewielkie odkształcenia”, stacjonarność naprężenia nie jest ważnym ograniczeniem).
Przyjmijmy teraz, że czoło ściany rozciąga się wzdłuż osi x, od x0 do xK (rys. 2.1) i że
obserwacje „nadchodzą” w momentach Tqttq 0 (q = 1, 2,..., K w czasie jednego skrawu)
gdzie T = 1 (np. T jest godziną) jest jednostką czasu dyskretnego. K jest liczbą obserwacji
w ciągu skrawu i liczbą umownych segmentów czoła ściany (rys. 1). Kombajn skrawa (jak często
bywa w praktyce) jadąc od x0 do xK a wracając ładuje urobek (dla teorii jest to nieistotne).
Zatem w chwilach tq obserwowana jest aktywność jKqq )]x,x(),t,t[(N 01 i energia
jKqq )]x,x(),t,t[(E 01 – z całej ściany ),( 0 Kxx , skumulowane w okresie ),( 1 qq tt –
oraz prędkość skrawania jqq )t,t(V 1 . Indeks „j” oznacza numer skrawu i położenie
ściany wzdłuż osi y. Jest to realistyczny opis sytuacji w kopalniach z systemami
dyspozytorskimi.
Poniżej „segmentem” nazywamy odcinek iii VT)x,x( 1 , natomiast „okresem” –
jednostkowy (T = 1) przedział czasu. Rysunek 2.1 pokazuje sytuację gdy segmenty
o ustalonym numerze mają ustaloną długość niezależnie od numeru skrawu „j” – co pozwala
na bardzo prostą dyskretyzację przestrzeni (x,y). Rysunek 2.2 pokazuje sytuację gdy wymóg
ten rozluźniono zachowując stałą liczbę (K) obserwacji w ciągu skrawu.
Dla uproszczenia zapisu dalej stosowane są oznaczenia:
jbbqqj )]x,x(),t,t[(N)b,q(N 11 , aktywność z segmentu
jKqqj )]x,x(),t,t[(N),q(N 01 , aktywność ze ściany
i analogicznie dla energii. Ponadto dla prędkości skrawania
jbbbbj )]x,x(),t,t[(V)b(V 11 , prędkość w segmencie

J. KORNOWSKI – Równania emisji sejsmoakustycznej i ich zastosowanie
____________________________________________________________________________
____________________________________________________________________________
522
Rys. 2.1. Szkic ilustrujący najprostszą dyskretyzację (czyli podział na segmenty) płaszczyzny pokładu
w przypadku stałej prędkości skrawania Fig. 2.1. An example of simple discretization of a coal seam midplane, in case of constant cutting velocity
Rys. 2.2. Szkic ilustrujący dyskretyzację płaszczyzny pokładu w przypadku stałej
średniej prędkości skrawania Fig. 2.2. An example of seam midplane discretization in case of constant mean cutting velocity
Ponadto wprowadzamy jeszcze dwie funkcje jn (b)f i je (b)f , które – dla wygody –
nazywane będą wymuszeniem (fn – „aktywnościowym”, fe – „energetycznym”):
jjnjn )b(V)b(c)b(f , ps-2 (2.1a)
jnjnejjeje )b(f)b(c)b(V)b(c)b(f 23 , Nms-2 (2.1b)
gdzie:
cn, ce i cne=ce/cn – to stałe proporcjonalności. Należy pamiętać, że jest to tylko wygodne
nazewnictwo: z punktu widzenia fizyki „wymuszeniem” jest naprężenie (lub obciążenie),
a skrawający kombajn – wytwarzając powierzchnię swobodną – zdejmuje więzy krępujące, co
umożliwia rozwój spękań i AE (aproksymując wymuszenia jednowymiarowym procesem
Browna, otrzymujemy 1jj )b(f)b(f oraz 1 jj )b(f)b(f gdzie η to zmienna
losowa). Dla wykorzystywanego tu modelu SMAE:
- odkształcenie ε jest splotem wymuszenia (σ) z funkcją Greena modelu,

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
523
- aktywność (n) jest proporcjonalna do pochodnej ( ) odkształcenia w obszarze
niesprężystym,
- energia emisji jest proporcjonalna do iloczynu 2n , aktywności i odkształcenia.
N oraz E bez górnych indeksów to wielkości generowane w polu emisji (np. Kornowski,
2004b), Nobs oraz Eobs to wielkości obserwowane na wyjściu systemu obserwacyjnego (symbol
to równość definiująca lub tożsamość). Ściana może być obserwowana za pomocą
M czujników i w każdej dyskretnej chwili q system dostarcza Nobs(m), Eobs(m), m = 1,..., M
obserwacji aktywności i energii „umownej” oraz jedną wartość V(b)j.
Symbol „p” użyty jako jednostka oznacza zdarzenia/impulsy (AE), od ang.: pulses.
W układzie SI symbol ten można po prosty pominąć, lecz gdy rzecz dotyczy AE, autor uznał
że należy go zachować.
Kreska nad zmienną (np. V ) oznacza jej wartość średnią, kropka (np. ) – pochodną
względem czasu.
3. Sejsmoakustyczne równania stanu (AESE)
Równania ewolucji stanów wymagają wprowadzenia wielkości zwanych macierzami
przejść (lub współczynnikami – czasem też prawdopodobieństwami – przejść, ang.: state
transition matrices), decydującymi o ewolucji zmiennych stanu:
SN
10
1 030 )B(BB 'k
(3.1a)
SE
10
01 )'k(H)(H)(H/)(H EEEE (3.1b)
Symbolem z (nie mylić z !) oznaczymy stałą czasową zaniku aktywności (np. po
zatrzymaniu kombajnu), jedną dla danej ściany (jednostką jest przyjęta jednostka czasu T, lecz
dla poprawności wymiarów piszemy [s]). Znając z możemy obliczyć
)/Texp(B z0 (3.2a)
z)B(B 02 1 , s (3.2b)
)B()BT(B zz 223 1 , s2 (3.2c)
k' – to okres skrawu, czas pomiędzy kolejnymi „odwiedzinami” kombajnu w x(b)j-1 oraz x(b)j,
( TK'k + czas przerw i ładowania).
Czynnik 'k0B określa względną aktywność emisji „szczątkowej”, utrzymującej się
w segmencie b, w chwili q, z poprzedniego skrawu.
Dla „wystarczająco dużych” wartości k
'
00'kB (3.3)
stąd macierz SN jest ściśle stała w czasie skrawu i w przybliżeniu stała zawsze, nawet gdy
przerwy i postoje są w każdym skrawie inne – o ile tylko K=const. (to ważne założenie).
Systemy, w których macierz przejść pozostaje stała nazywamy niezmienniczymi
względem czasu (ang: TI – time-invariant; a gdy system jest liniowy to LTI – linear time-
invariant).

J. KORNOWSKI – Równania emisji sejsmoakustycznej i ich zastosowanie
____________________________________________________________________________
____________________________________________________________________________
524
Wielkość τ (nie mylić z τz !) to opóźnienie, różnica czasu między momentami obserwacji
i przyłożenia wymuszenia:
1
1
jorazbqgdy,
jorazbqgdy,
bqgdy,
)qb('k
bq
(3.4)
(„b” – to numer segmentu czoła ściany, segment b jest zawsze skrawany – co oznacza też
przyłożenie wymuszenia – w chwili b; „q” to moment obserwacji; czas jest dyskretny).
Wprowadzimy teraz ważną wielkość:
]/)hBT(B)B()hB,T(BB)BT(B[)(H MMz
E 350 2230
212
2020 ,s2 (3.5a)
gdzie: 01 1 Bh (3.5b)
32012 /)Bh(h (3.5c)
BM.
to parametr modelu (SMAE) aproksymującego skałę, mierzalny (Kornowski 2004a)
wykorzystując pomiary energii AE zanikającej np. po zatrzymaniu kombajnu.
Wyznaczenie (eksperymentalne) liczbowych wartości parametrów τz oraz BM
wystarcza do obliczenia wszystkich elementów macierzy SN i SE.
Gdy wszystkie (prócz 30
200 B,B,B ) elementy wyrażenia )(H E są ustalone, równanie (3.5a)
zapisać można w postaci:
)exp(A)exp(A)exp(A)(HE 131211 32 (3.6)
gdzie:
350 222
3122311 /)hBT()B(A),hB,T(BA,BA,/T Mz
Mzz .
)(EH – jest odpowiedzią energetyczną segmentu na jednostkowy skok wymuszenia
„energetycznego” je bf )( . Analogicznie:
τ)α(expBBB)(τHτN
1303 (3.7)
jest odpowiedzią aktywnościową na jednostkowy skok jn bf )( . Można też wykazać
(Kornowski 2004a), że dla ustalonego segmentu „b” i dla momentu bq (tzn. tylko gdy
0 , przy czym τ jest czasem liczonym od chwili „włączenia” segmentu b):
τ03jnj BB(b)fb)(q,N , p (3.8a)
)(H(b)fb)(q,EE
jej , Nm (3.8b)
Dla ustalonego segmentu b, równania te opisują ewolucję )bq( uśrednionej (po
hipotetycznym zbiorze realizacji) emisji ( N oraz E ) w miarę upływu czasu τ. Rezygnując
z formy uśrednionej, równania te można zapisać w postaci stochastycznej:

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
525
Nτ03jnj ηBB(b)fb)N(q, , p (3.9a)
EEjej η)(H(b)fb)E(q, , Nm (3.9b)
gdzie:
ηN oraz ηE – to „błędy” losowe: w przypadku zastosowania filtru Kalmana do estymacji
i prognozy potrzeba nieco więcej informacji o ηN i ηE – w tej pracy nie są one jednak
potrzebne. Równania te pokazują że (w sytuacji określonej założeniami Z 1–Z 5) pod
wpływem stałego, skokowo przyłożonego wymuszenia:
- b)(q,N maleje wykładniczo od wartości początkowej do 0;
- b)(q,E może początkowo rosnąć, by w końcu też zmaleć do 0;
i ogólnie:
- )b,q(N jest pochodną splotu )b(f)bq(H nN ;
- )b,q(E jest pochodną splotu )b(f)bq(H eE .
Jest to skutek liniowości równania konstytutywnego SMAE.
Równania (3.9a,b) opisują ewolucję emisji w trybie bezwarunkowym co powoduje, że
wariancja składowych losowych rośnie wraz z τ bez ograniczenia – i nie powinny być
stosowane dla dużych (np. większych od τ = 2 lub τ = 3) wartości τ. Znacznie lepsze wyniki
daje prognoza sekwencyjna (po zaobserwowaniu N(τ) lub E(τ) prognozuje się N(τ+1) lub
E(τ+1) i czeka na następną obserwację) prowadzona zawsze dla najbliższej jednostki czasu.
Z równania (3.6) wynika, że gdy τ rośnie to 03BB)(H E zatem asymptotycznie )(
energia maleje tak jak aktywność (pamiętać należy, że N i E to wielkości skumulowane
w jednostce czasu). Ponadto, jeżeli w równaniach (3.8a,b) w miejsce τ wstawimy q-b
i podzielimy przez równanie w którym zamiast q wystąpi q-1 to otrzymamy:
jj bqNBbqN ),1(),( 0 (3.10a)
jj bqEGbqE ),1()(),( (3.10b)
gdzie:
)1(/)()( HHG (3.10c)
Równania te można – jak poprzednio – zapisać w formie stochastycznej:
N
j0j ηb)1,N(qBb)N(q, , p (3.11a)
Ejj ηb)1,)E(qG(b)E(q, , Nm (3.11b)
opisującej ewolucję zmiennych stanu dla ustalonego segmentu b i dla 1 bq , przy czym
segment b skrawany był w „chwili” b.
Należy zauważyć różnicę w sposobie ewolucji aktywności i energii dla małych wartości τ:
różnica ta znajduje uzasadnienie w teorii modelu SMAE (np. Kornowski 2004 a).
Pamiętając, że w ociosie występuje K segmentów, wprowadzamy jeszcze funkcję
wskaźnikową Q taką, że 1Q gdy qb i 0Q gdy qb . Teraz sformułować można
równania stanu: gdy ściana obserwowana jest K–krotnie w ciągu skrawu przez każdy
z M. czujników, równania AE w przestrzeni stanów (N, f) mają postać pseudoalgorytmu:

J. KORNOWSKI – Równania emisji sejsmoakustycznej i ich zastosowanie
____________________________________________________________________________
____________________________________________________________________________
526
znając wartości początkowe Kbbcn ,...1,)( 0 oraz
0),0(),( 10 bNbqN i wiedząc że 0'
0 kB gdy 1j , oblicz
dla ,...2,1j
dla Kq ,...,1
(3.12a)
(3.12b)
Jeżeli 1 jj )b(V)b(V – czyli w przypadku prostej dyskretyzacji przestrzeni, jak na
rysunku 2.1 – to 1R . Gdy znana jest wartość τz oraz warunki początkowe, to równania (3.12)
umożliwiają, dla „obserwowanych” prędkości j)b(V , symulację ewolucji aktywności,
wymuszenia i wielkości )(bc proporcjonalnej do naprężenia – w segmentach Kb ,...,2,1
w kolejnych skrawach ,...2,1j . Równocześnie algorytm zwany filtrem Kalmana umożliwia
optymalną estymację i prognozę tych wielkości.
Zaletą tak skonstruowanych równań stanu jest możliwość estymacji stanu (N, E, f)
poszczególnych segmentów ściany, mimo że system obserwuje (bez lokalizowania
źródeł AE) całą ścianę. Rozdzielczość estymacji zależy wprost od rozdzielczości
obserwacji. Otwiera to zupełnie nowe możliwości oceny stanu – w tym stanu zagrożenia –
ściany.
Warunek 1)()( jj bVbV może być „rozluźniony” dopuszczając 1)()( jj bVbV (jak na
rys. 2.2) jeżeli w kolejnych skrawach wartość K czyli liczba obserwacji i segmentów pozostaje
stała. Wówczas:
1j,1R (3.13a)
112 j,])b(V/)b(V[QR Qjj (3.13b)
gdzie Q jest funkcją wskaźnikową, natomiast
111 1
1
1
1
2
qb,j,)q(V/])q(V)q(V[Q j
q
i
j
q
i
j (3.14a)
112 qb,Q (3.14b)
Równania (3.13, 3.14) stanowią, że w pierwszym skrawie (j = 1) R nie jest liczone, a potem
emisja z urobionych segmentów )( bq ewoluuje zgodnie z (3.12a) lecz jest multiplikatywnie
modyfikowana czynnikiem 1)(/)( jj bVbV , natomiast (3.14) umożliwia określenie długości –
dla Kb ,...,1
równanie ewolucji stanów
2fN
N
1jn
jN
jn
j
ps,
p,
Qη
η(b)Qf
b)1,N(qSR
(b)Qf
b)N(q,
dla Mm ,...,1
równanie obserwacji
K
1b
Nobs1j
obsp,ηb)N(q,m)(q,N

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
527
najbliższego jeszcze nie skrawanego segmentu – tak, by pozostałe segmenty mogły zachować
długości z poprzedniego skrawu.
Analogiczne do (3.12a,b) równania wyprowadzono (Kornowski 2004a) dla zmiennych
stanu ),( efE . Mają one postać pseudoalgorytmu:
znając wartości początkowe Kbbce ,...1,)( 03 oraz
0),0(),( 10 bEbqE oblicz
dla ,...2,1j
dla Kq ,...,1
(3.15a)
(3.15b)
Energii „umownej” uobs EE nie przypisujemy tu jednostek. Funkcja b)T(m, to
„transmitancja” kanału od segmentu „b” do wyjścia systemu obsługującego czujnik „m”.
Określenie wartości b)T(m, wymaga określenia charakterystyki aparatury oraz „charaktery-
styki górotworu” (w szczególności tłumienia) między segmentem b a czujnikiem m. Obliczenia
znacznie się upraszczają, gdy zakładamy że źródłem emisji jest przyociosowa warstwa pokładu
(założenie Z2) i to jest zasadniczym powodem przyjęcia Z2. R zależy od regularności
skrawania tak jak w przypadku równań aktywności.
Zagadnienie równań stanu w przypadku zmiennej liczby niewiadomych i pomiarów
)( constK czeka na rozwiązanie.
4. Przypadki szczególne
A. Ponieważ z przyjętego równania ewolucji naprężeń wynika, że 1)()( jnjn bfbf , zatem
wyjęte z (3.12a) równanie aktywności N zapisać możemy w następującej „uśrednionej”
formie:
jn'k
jj )b(f)B(RB)b,q(NRB)b,q(N 030 11 (4.1)
(w chwili q wielkość N(q-1,b) jest znana z obserwacji zatem deterministyczna i jej uśrednianie
jest zbędne). Jak poprzednio, Q = 1 gdy q = b i Q = 0 gdy q b, możemy więc uważać, że Q
umożliwia okresowe (co k') ustalanie wartości początkowej aktywności (i od tego momentu
aktywność z b-tego segmentu maleje). Na przykład:
niech '0,1,1 kBbj i 00 )b,(N ; wówczas,
dla Kb ,...,1
równanie ewolucji stanów
21
1
Nms,
Nm,
Q)b(Qf
)b,q(ESR
)b(Qf
)b,q(E
fE
E
je
j
Eje
j
dla Mm ,...,1
równanie obserwacji
K
b
Eujj
obs)b,q(E)b,m(T)m,q(E
1
1

J. KORNOWSKI – Równania emisji sejsmoakustycznej i ich zastosowanie
____________________________________________________________________________
____________________________________________________________________________
528
w chwili: 131 1111 )(fB),(N,q n
131 11122 ),(NB),(N,q
131 12133 ),(NB),(N,q i tak dalej do q = K następnie dla dalszych
segmentów ),...,2( Kb i dla dalszych j.
Wyrażenie jn bQf )( informuje, że do segmentu „b” w chwili skrawania (tzn. gdy bq ),
przykładane jest wymuszenie fn(b).
Dla ustalonego segmentu b, licząc czas od momentu skrawania tego segmentu możemy –
pamiętając, że równanie dotyczy AE uśrednionej po hipotetycznym zbiorze stochastycznych
realizacji – zapisać:
)()1()( 1 bQfNaN nn (4.2a)
gdzie: 01 RBa (4.2b)
)1( '03k
n BRB (4.2c)
co w dziedzinie czasu ciągłego ma postać:
,...2,1)'()()( 1 jjkttnatn nn (4.3)
gdzie:
[ )( kjtn – to ciąg impulsów o amplitudzie fn(b)j, przykładowych w chwilach t = kj (czyli
gdy np. b = 1 rozpoczynając każdy nowy (j-ty) skraw) wielkość n to intensywność aktywności
(w chwili t, z odcinka b), wielkość ta musi być całkowana w dziedzinie czasu by otrzymać
obserwowalną aktywność N]. Zarówno w przypadku (4.2) jak i (4.3) rozwiązanie, dla >0 (lub
dla t >0) ma postać funkcji skokowo wzrastającej co k' (tzn. w chwilach t = k'j) i wykładniczo
malejącej aż do następnego skoku. Zauważmy, że emisja z ustalonego segmentu „b” nie jest na
ogół łatwo obserwowalna.
B. Z równania (4.1) wynika interesująca zależność. Przyjmijmy dla uproszczenia R = 1 i usta-
lmy chwilę q. W chwili tej kombajn skończył skrawanie segmentu ( qq xx ,1 ). Sumując
równanie (4.1) w chwili q po wszystkich segmentach ),...,1( Kb otrzymamy:
jnnjj )b(fQ),q(NB),q(N 10 (4.4)
stąd
jnnjj )qb(f),q(NB),q(N 10 (4.5)
gdzie:
symbol fn(b = q) – oznacza wymuszenie w segmencie właśnie (w chwili q) urobionym i całe
równanie dotyczy wielkości uśrednionych (ponieważ po dokonaniu obserwacji wielkości
stochastyczne stają się deterministycznymi, faktycznie po chwili „q” tylko fn jest średnim
wymuszeniem). Jeżeli równanie (4.5) potraktujemy jako funkcję czasu ciągłego to, kładąc
t w miejsce q i pisząc f(tb) otrzymamy:

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
529
)(),(),( 0 bnn tftnBtn (4.6)
gdzie:
)( bn tf – jest teraz ciągłą funkcją czasu (zgodną z rozkładem wymuszenia wzdłuż czoła
ściany). ),( tn to chwilowa intensywność aktywności z całej ściany (którą należy całkować od
tq-1 do tq by otrzymać ),( qN ) i jest ona splotem wymuszenia z wykładniczo malejącą funkcją
Greena pokładu aproksymowanego zbiorem SMAE. Zgodnie z (2.1a) możemy napisać:
]),1(),([])([)( 01
jjjjn qNBqNqbVqbc (4.7)
Wykluczając momenty gdy V = 0, równanie to ma dość prostą interpretację:
Średnie naprężenie w okresie q, w segmencie b = q gdzie kombajn właśnie skończył
skrawanie, jest proporcjonalne do – podzielonej przez długość tego segmentu –
aktywności jqN ),( z całej ściany, pomniejszonej o aktywność resztkową ),1(0 qNB
z okresu poprzedzającego okres q. Zarówno ),q(N jak i ),q(N 1 są estymowalne
wykorzystując równania obserwacji.
Zależność ta umożliwia monitorowanie czaso-przestrzennego rozkładu wielkości
proporcjonalnej do lokalnego naprężenia a rozdzielczość estymacji zależy od przyjętej
jednostki czasu (okresu obserwacji) T.
Współczynnik proporcjonalności nc w równaniu (4.6) jest niewyznaczalny, stąd monitorować
można zmiany lecz nie - wartość . Równania od początku zakładają obecność „niewielkich
odkształceń niesprężystych” czyli niewielkiego zagrożenia tąpaniami, a symbol N (w odróżnie-
niu od Nobs) oznacza aktywność w źródłowym polu emisji. Jeżeli liczba (M) czujników jest nie
mniejsza od liczby (K) niewiadomych to równanie obserwacji rozwiązać można w każdej
chwili q, niezależnie od równania ewolucji. Gdy K > M, wykorzystać należy równanie ewolu-
cji rozwiązując (metodą filtru Kalmana) pełne zadanie estymacji stanów (N, fn). C. Podobnie jak w punktach A i B – lecz nieco bardziej złożone – analizy wykonać można dla
energii, lecz ze względu na rozmiary publikacji nie będziemy tego robili.
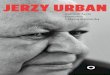
Nie mogąc pokazać przykładu ilustrującego związek zmiennych stanu (N, E) z wymuszeniem –
gdyż wielkości te nie są bezpośrednio obserwowalne – na rys. 3 pokazano zależności wiążące
obserwowalne wielkości V(t), Nobs(t) i Eobs(t) – gdzie t jest dyskretnym czasem z godzinową
jednostką. Rysunek ten przedstawia wyniki dziesięciodniowej obserwacji AE (znanej
z zagrożenia ściany 37/501 w kopalni „Wesoła”) dwoma czujnikami A9 i A11 oraz systemem
dyspozytorskim umożliwiającym oszacowanie V(t). Faktycznie wielkość ta to – na rysunku 4.1
– ułamek równy, podzielonej przez 60, liczbie minut pracy kombajnu w danej godzinie: jest to
tylko zgrubne przybliżenie V(t). Autor ma nadzieję, że dość proste - szczególnie w przypadku
aktywności – zależności splotowe (zgodnie z (4.4b) „aktywność chwilowa” jest splotem
wymuszenia z wykładniczo malejącą funkcją Greena charakteryzującą, zgodnie z modelem
SMAE, elementy pokładu), a w szczególności stopniowy – a nie ciągły – zanik emisji po
zatrzymaniu kombajnu, są na rysunku tym widoczne. Względnie proste (liniowe, określone
równaniami stanu) zależności łączące emisję z wymuszeniem są bowiem najistotniejszą rzeczą
którą autor chciał tu pokazać.

J. KORNOWSKI – Równania emisji sejsmoakustycznej i ich zastosowanie
____________________________________________________________________________
____________________________________________________________________________
530
Rys. 4.1. Przykład zależności emisji sejsmoakustycznej (N – aktywność, E – energia) od prędkości
skrawania (V). Skala pozioma (w godzinach) obejmuje 10 dób obserwacji dwoma czujnikami Fig. 4.1. An example of AE dependence (N – activity, E – energy) on cutting velocity(V). Horizontal
scale (in hours) comprizes 10 days of observarions with two sensors
5. Wnioski
1. Przedstawiono – po raz pierwszy w zwartej i pełnej formie – sejsmoakustyczne równania
stanu (3.12a,b) (3.15a,b).
2. Równania stanu są liniowe, a wszystkie ich parametry są mierzalne. Równania mogą więc
być wykorzystywane do estymacji wartości zmiennych stanu w kolejnych „momentach”
dyskretnego czasu i „punktach” dyskretnej przestrzeni.
3. Dyskretyzacja czasu i przestrzeni, zatem rozdzielczość estymacji, zależy od prędkości
skrawania i od częstości obserwacji.
4. Do „rozwiązywania” równań stanu służy algorytm zwany filtrem Kalmana.
Literatura
[1] Kalman R. E. 1960: A new approach to linear filtering and prediction problems. Trans. ASME,
J. Basic Engineering, Ser. D, Vol. 82, 1006 – 1019. [2] Kalman R. E, Bucy R. S. 1961: New results in linear filtering and prediction theory. Trans. ASME,
J. Basic Engineering, Ser. D, Vol. 83, 95 – 108. [3] Kornowski J. 2001: Sejsmoakustyczna ocena zagrożenia tąpaniami – przegląd stosowanych metod
i aparatury. W: Dubiński J., Pilecki Z., Zuberek W.M. (red.) „Badania geofizyczne w kopalniach”, Wyd. IGSMiE PAN, Kraków.
[4] Kornowski J. 2002 a: Podstawy sejsmoakustycznej oceny i prognozy zagrożenia sejsmicznego w górnictwie. Wyd. GIG, Katowice.
24 48 72 96 120 144 168 192 216 2400
1
2 V
t
24 48 72 96 120 144 168 192 216 2400
700
1400N
t
A9
24 48 72 96 120 144 168 192 216 2400
700
1400N
t
A11
24 48 72 96 120 144 168 192 216 2400
600
1200E
t
A9
24 48 72 96 120 144 168 192 216 2400
600
1200E
t
A11

WARSZTATY 2004 z cyklu „Zagrożenia naturalne w górnictwie”
____________________________________________________________________________
____________________________________________________________________________
531
[5] Kornowski J. 2002 b: Linearized Theory of Acoustic Emission from a Coal Longwall with Applications, Publs. Inst. Geophys. Pol. Acad. Sc., M-24 (340), 53 – 57.
[6] Kornowski J. 2004 a: Approximate Linear Theory of Mining Seismoacoustics. Arch. Min. Sci. (w druku).
[7] Kornowski J. 2004 b: Seismoacoustic Emission Field and Its Applications. Acta Montana, Ser. A, No. 137, 1 – 4.
[8] Ogata K. 1974: Metody przestrzeni stanów w teorii sterowania. WNT, Warszawa.
Seismoacustic emission equations and its application
Seismoacoustic state-space equations – composed of evolution equation(s) and observation equation(s) – describing AE from a coal longwall cutted with a shearer and observed with a network of AE sensors, have been presented. Information easily obtainable in normal (in seismically hazardous Polish coal mines) conditions is sufficient to (sequentially) solve the equations, resulting with estimates of state variables (e.g. activity, energy and quantity proportional to the local stress) at the coal seam segments much smaller than the whole longwall. State-space equations are both theoretically important (making possible optimal sequential estimation with the algorithm know as the Kalman filter) as well as potentially useful allowing monitoring the internal state of the observed longwall.
Przekazano: 25 marca 2004 r.