Embed Size (px)
Citation preview
PROGRAM OF THE
The conference is organized by The Czech Society for Cybernetics and Informatics (CSKI) and Politecnico di Milano in cooperation with the Modelica Association.
12 INTERNATIONAL
CONFERENCEM DELICAMay 15–17, 2017Clarion Congress Hotel PragueCzech Republicwww.modelica.org

2Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
Doc. MUDr. Jiří Kofránek, CSc., Charles University, Czech Republic (Conference Chair)Prof. Francesco Casella, Politecnico di Milano, Italy (Program Chair)Prof. Peter Fritzson, Linköping University, SwedenProf. Martin Otter, DLR, GermanyDr. Hilding Elmqvist, Mogram AB, Lund, SwedenDr. Michael Tiller, Xogeny, Michigan, USA
CONFERENCE BOARD ............................................................................................................................................. 2WELCOME ................................................................................................................................................................ 2KEYNOTE SPEAKERS .............................................................................................................................................. 3GENERAL SCHEDULE .............................................................................................................................................. 4FMI USER MEETING & TUTORIALS ......................................................................................................................... 5VENDOR SESSIONS ................................................................................................................................................. 5SCIENTIFIC PROGRAM ............................................................................................................................................ 6POSTER SESSION.................................................................................................................................................. 12SOCIAL PROGRAM ................................................................................................................................................ 13PRACTICAL INFORMATION ................................................................................................................................... 13SITE PLAN ............................................................................................................................................................. 14EXHIBITION ........................................................................................................................................................... 14EXHIBITORS .......................................................................................................................................................... 15SPONSORS ............................................................................................................................................................ 16
CONTENTS
WELCOME
CONFERENCE BOARD
Francesco CasellaProgram Chair
Jiří KofránekConference ChairWe would like to welcome you to Prague for the 12th international Modelica Conference. The conference was organized by the Modelica Association in cooperation with the Czech Society for Informatics and Cybernetics and Politecnico di Milano.
Modelica is not only a unique modeling language, which is widely used in numerous branches of industry and also in research and science, but most of all it is an immensely effective tool for complex simulations in the automotive industry, building energy management, aerospace and many other fields of engineering.
The program of the conference is interesting not only for the participants, who already use Modelica, but also for those who would like to be introduced to the possibilities of this new modern modeling language by our numerous tutorials. The usage of the language is facilitated by Modelica libraries focused on diverse fields. Consequently, an important part of the conference is the traditional Library Award Announcement.
We welcome you to Prague, the city of many historic sites, culture and also the music festival Prague Spring, taking place in Prague this week.
The International Modelica Conference is the most important place for the Modelica and FMI communities to meet, exchange ideas and advance the state of the art in object-oriented modelling.
This year we received 129 paper submissions for the scientific program. After a thorough peer review process by the International Program Committee, 83 were accepted for full oral presentation and 19 for poster presentation, with authors coming from 18 different countries in Europe, Asia, America, and Oceania. The scientific program is completed by two distinguished keynote talks, one from industry and one from academia.
The conference also hosts nine tutorials, the FMI User Meeting, as well as vendor presentations and a commercial exhibition.
I warmly welcome you to the 12th International Modelica Conference and I wish you a successful, pleasant, and rewarding stay in Prague!

3
KEYNOTE SPEAKERS
Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
Abstract: The family of Synchronous programming languages was born in the 1980’s in three different French labs that gathered researchers in Computer Science and Control Theory. The three first languages were Esterel, dedicated to control-dominated problems in embedded systems, telecom protocols and later digital circuit design, Lustre, dedicated to continuous control, and Signal, oriented towards signal processing. They share a common perfect synchrony principle that expresses that the reaction to an input should be viewed as conceptually instantaneous. This simple principle is well-adapted to the targeted applications and greatly simplifies programming by reconciling parallelism and determinism. It also leads to well-defined mathematical semantics that directly ground their formal compiling, simulation and verification environments. Synchronous programming rapidly became used in Industry for safety-critical production systems in avionics (Dassault Aviation, Airbus, etc.), railways, etc., as well as in robotics and circuit design. In the 2000’s, Esterel and Lustre have been unified in two new languages industrialized by Esterel Technologies (now part of Ansys): SCADE 6 for safety critical software and Esterel v7 for hardware design, both also incorporating ideas from Harel’s reactive graphical formalism Statecharts.The talk will explain the practical and mathematical concepts of synchronous programming and stress its advantages over asynchronous concurrent programming for the considered applications. It will also explore the links between synchronous programming and modeling / simulation. In one direction, synchronous languages are ideal targets to generate embedded code from executable parts of simulation models. In the other direction, embedding synchrony into conventional modelers may be necessary to solve the current tricky issues due to the coupling of discrete and continuous computations in modelers, in particular for the currently mishandled case where external or internal events provoke cascades of discrete reactions. Pouzet and Bourkes’s new Zelus language is a step in this direction.
Bio: Former student of the Ecole polytechnique, Member of the Academy of sciences, of the Academy of technology and the Academia Europaea, CNRS Gold medal 2014, Gérard Berry was a researcher at the Ecole des mines of Paris and INRIA from 1973 to 2000, Chief Scientist of the company Esterel Technologies from 2001 to 2009, then Research Director at INRIA and President of the Evaluation Committee of this Institute from 2009 to 2012. He holds the Chair Algorithms, Machines and Languages at the Collège de France from 2012, after having held two annual chairs in 2007-2008 and 2009-2010.His scientific contribution concerns four main topics: the formal treatment of programming languages and their relations with mathematical logic, reactive and real-time programming for embedded systems, integrated circuit computer-aided design, and formal verification of programs and circuits. He is the creator of the Esterel programming language.
Abstract: Robotics will change the world! It will unleash the same if not an even more disruptive and transformational power within the next 50 years as mainstream IT-technology and the Internet have over the last half a century. Nurtured by technological breakthroughs in industrial automation, robotics will exhaustively permeate all domains of the human living realm. Hence, our grandchildren will grow up in a society that is enriched and enhanced by assistive technologies in every imaginable way. Robotics and automation will be tailored into many everyday objects, becoming an integral part of all kinds of appliances. This Generation ‚R‘ will be without fear of these technologies perceiving their beneficial nature - they will grow up as Robotic Natives. This implies, that today‘s people are already born to become the first society of Robotic Immigrants. Although it is not possible to precisely predict the world of tomorrow, the presented model of the 4 Robotic Revolutions provides a compelling, holistic approach to describe the future phases of robotic evolution, characterizing them according to their technological enablers and underlying interaction paradigms.
Bio: Dr. Bernd Liepert is the Chief Innovation Officer of KUKA AG, a world leading manufacturer of industrial robots. Dr. Liepert earned his diploma in mathematics in 1990 from the University of Augsburg and his honorary doctor degree from University of Magdeburg in 2011. Since 1990 Dr. Liepert has worked in changing positions for KUKA. From 1990 to 1996 he worked as mathematician and developer at KUKA Schweissanlagen + Roboter GmbH before he took charge as head of development of the newly founded company KUKA Roboter GmbH until 1997. From 1998-1999 he was a member of KUKA Roboter GmbH Board of Management, responsible for development and design. From 2000-2009 Dr. Liepert was the CEO of KUKA Roboter GmbH. From 2010 to January 2015 he was the CTO of KUKA AG, responsible for technology and development of the whole KUKA group. As Chief Innovation Officer of KUKA AG, Dr. Liepert is now responsible for expanding innovations at KUKA where he can apply his vast robotics experience at the interface between technology and the market. From 2008-2012 Dr. Liepert was President of EUROP, the European Robotics Technology Platform, and subsequently President of euRobotics AISBL – the European Robotics Association. euRobotics was founded in September 2012 and has become the private side of SPARC, the European Public- Private Partnership in Robotics in 2013. As president of these associations Dr. Liepert has been leading the European robotics community and representing it at high political levels.
Synchronous Programming and its fit with Modeling
Presenter:Gérard BerryParis, France
Challenges of Future Robotics
Presenter:Bernd LiepertPresident of the euRobotics AISB Chief Innovation Officer at KUKA AG

4
GENERAL SCHEDULE
Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
MONDAY, MAY 15
13:00-16:30 FMI User Meeting & Tutorials16:30-17:00 Coffee Break
Zenit Nadir Tycho-Kepler
17:00-17:45 Vendor Session I17:45-18:30 Vendor Session II 18:30-19:15 Vendor Session III19:30 Welcome Reception will take place at the Foyer of the conference floor
TUESDAY, MAY 16
Zenit-Nadir Tycho-Kepler Aquarius-Taurus Leo-Virgo Foyer-Meridian
9:00-9:20 Opening and Welcome Address
9:20-9:30 Modelica News9:30-10:15 Keynote 110:15-10:45 Coffee Break 1
10:45-12:25 Automotive I Buildings IProcess
& Chemical Engineering
Control Systems I
12:25-14:15 Lunch in Veduta Restaurant
14:15-15:30 Automotive II Buildings II Electrical & Power Systems I Control Systems II
15:30-16:00 Coffee Break 216:00-17:15 Poster Session
17:15-18:30 Automotive III Thermodynamic Systems
Electrical & Power Systems II Control Systems III
20:00Conference Dinner including Library Award Announcement
at Národní dům na Vinohradech individual transportation, offered assistance: meeting point at 19.00 by the registration desk
WEDNESDAY, MAY 17
Zenit-Nadir Tycho-Kepler Aquarius-Taurus Leo-Virgo Foyer-Meridian
8:30-9:15 Keynote 29:15-9:20 Short Break
9:20-10:35 FMI INumerical & Symbolic
Methods
Acoustic & Medical Systems
Wind & Naval Engineering
10:35-11:05 Coffee Break 1
11:05-12:45 FMI II Modelica Language & Tools
Mechanical Systems
ModellingHVAC Systems
12:45-14:30 Lunch in Veduta Restaurant
14:30-16:10 Modelica Tools & GUIs
Power Plants & Energy Systems Aerospace
Mechanical Systems, Robotics
& VR16:10-16:15 Short Break16:15-16:30 Closing16:30 Coffee Break 2
5Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
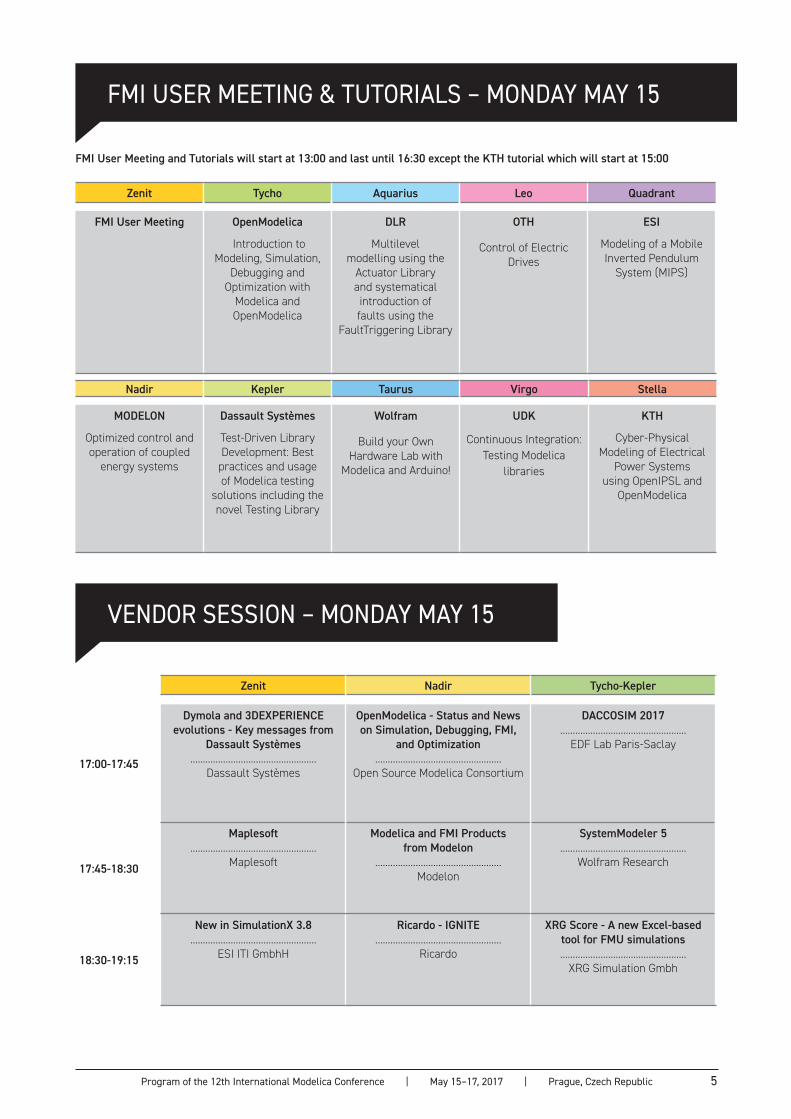
Zenit Nadir Tycho-Kepler
17:00-17:45
Dymola and 3DEXPERIENCE evolutions - Key messages from
Dassault Systèmes..................................................
Dassault Systèmes
OpenModelica - Status and News on Simulation, Debugging, FMI,
and Optimization ..................................................
Open Source Modelica Consortium
DACCOSIM 2017 ..................................................
EDF Lab Paris-Saclay
17:45-18:30
Maplesoft ..................................................
Maplesoft
Modelica and FMI Products from Modelon
.................................................. Modelon
SystemModeler 5 ..................................................
Wolfram Research
18:30-19:15
New in SimulationX 3.8 ..................................................
ESI ITI GmbhH
Ricardo - IGNITE ..................................................
Ricardo
XRG Score - A new Excel-based tool for FMU simulations ..................................................
XRG Simulation Gmbh
Zenit Tycho Aquarius Leo Quadrant
FMI User Meeting OpenModelica
Introduction to Modeling, Simulation,
Debugging and Optimization with
Modelica and OpenModelica
DLR
Multilevel modelling using the
Actuator Library and systematical introduction of faults using the
FaultTriggering Library
OTH
Control of Electric Drives
ESI
Modeling of a Mobile Inverted Pendulum
System (MIPS)
Nadir Kepler Taurus Virgo Stella
MODELON
Optimized control and operation of coupled
energy systems
Dassault Systèmes
Test-Driven Library Development: Best
practices and usage of Modelica testing
solutions including the novel Testing Library
Wolfram
Build your Own Hardware Lab with
Modelica and Arduino!
UDK
Continuous Integration: Testing Modelica
libraries
KTH
Cyber-Physical Modeling of Electrical
Power Systems using OpenIPSL and
OpenModelica
VENDOR SESSION – MONDAY MAY 15
FMI User Meeting and Tutorials will start at 13:00 and last until 16:30 except the KTH tutorial which will start at 15:00
FMI USER MEETING & TUTORIALS – MONDAY MAY 15

6Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
SCIENTIFIC PROGRAM – TUESDAY MAY 16Ze
nit-N
adir
9:00
-9:2
0Op
enin
g an
d W
elco
me
Addr
ess
9:20
-9:3
0M
odel
ica
New
s
9:30
-10:
15Ke
ynot
e 1:
Ber
nd L
iepe
rt: C
halle
nges
of F
utur
e Ro
botic
s
Zeni
t-Nad
irTy
cho-
Kepl
erAq
uariu
s-Ta
urus
Leo-
Virg
o
Auto
mot
ive
ICh
air:
Mic
hael
Till
er
Bui
ldin
gs I
Chai
r: Ch
risto
ph N
ytsc
h-Ge
usen
Proc
ess
& C
hem
ical
Eng
inee
ring
Chai
r: Ge
rhar
d Sc
hmitz
Con
trol
Sys
tem
s I
Chai
r: Jo
han
Åkes
son
10:4
5-11
:10
Deve
lopm
ent o
f an
Inte
grat
ed
Cont
rol o
f Fro
nt S
teer
ing
and
Torq
ue V
ecto
ring
Diff
eren
tial G
ear
Syst
em U
sing
Mod
elic
a
Yuta
ka H
irano
Cou
pled
Sim
ulat
ion
betw
een
CFD
and
Mul
tizon
e M
odel
s Ba
sed
on
Mod
elic
a Bu
ildin
gs L
ibra
ry to
Stu
dy
Indo
or E
nvir
onm
ent C
ontr
ol
Wei
Tia
n, W
angd
a Zu
o,
Thom
as S
evill
a an
d M
icha
el S
ohn
Dev
elop
men
t of a
The
rmod
ynam
ic
Engi
ne in
Ope
nMod
elic
a
Rahu
l Jai
n, K
anna
n M
oudg
alya
, Pe
ter
Fritz
son
and
Adria
n Po
p
Fram
ewor
k fo
r dy
nam
ic
optim
izat
ion
of d
istr
ict h
eatin
g sy
stem
s us
ing
Optim
ica
Com
pile
r To
olki
t
Gera
ld S
chw
eige
r, H
åkan
Run
vik,
Fr
edrik
Mag
nuss
on,
Per-
Ola
Lars
son
an
d St
épha
ne V
elut
11:1
0-11
:35
Vir
tual
Occ
upan
t Mod
el
for
Ridi
ng C
omfo
rt S
imul
atio
n
Hyu
ng Y
un C
hoi,
Man
yong
Han
, Ak
inar
i Hira
o
and
His
ayos
hi M
atsu
oka
Co-
Sim
ulat
ion
betw
een
deta
iled
build
ing
ener
gy p
erfo
rman
ce
sim
ulat
ion
and
Mod
elic
a H
VAC
com
pone
nt m
odel
s
Andr
eas
Nic
olai
and
Ann
e Pa
epck
e
Inte
grat
ed P
roce
ss a
nd M
olec
ular
De
sign
with
Mod
elic
a U
sing
Co
ntin
uous
-Mol
ecul
ar T
arge
ting
Chris
toph
Udo
Ger
tig,
Dom
inik
Till
man
ns,
Joha
nnes
Sch
illin
g, U
we
Bau,
Fr
anz
Lanz
erat
h, J
oach
im G
ross
an
d An
dré
Bard
ow
Optim
al C
ontr
ol o
f Dis
tric
t Hea
ting
Syst
ems
usin
g Dy
nam
ic S
imul
atio
n an
d M
ixed
Inte
ger
Line
ar
Prog
ram
min
g
Loïc
Gira
ud, M
assi
niss
a M
erab
et,
Rola
nd B
avie
re
and
Mat
hieu
Val
lée
11:3
5-12
:00
A S
imul
atio
n-Ba
sed
Digi
tal T
win
fo
r M
odel
-Dri
ven
Hea
lth M
onito
ring
an
d Pr
edic
tive
Mai
nten
ance
of a
n Au
tom
otiv
e Br
akin
g Sy
stem
Ryan
Mag
argl
e, L
ee J
ohns
on,
Padm
esh
Man
dloi
, Joh
n Ba
tteh
an
d An
and
Pitc
haik
an
Aspe
cts
of F
MI i
n Bu
ildin
g Si
mul
atio
n
Tors
ten
Schw
an, R
ené
Ung
er
and
Jörg
Pip
iork
e
Dyn
amic
Sim
ulat
ions
of t
he P
ost-
com
bust
ion
CO2
Capt
ure
Syst
em o
f a
Com
bine
d Cy
cle
Pow
er P
lant
Rub
én M
ocho
lí M
onta
ñés
an
d La
rs O
lof N
ord
Rapi
d de
velo
pmen
t of a
n ai
rcra
ft ca
bin
tem
pera
ture
reg
ulat
ion
conc
ept
Alex
ande
r Po
llok,
Dan
iel B
ende
r, In
es K
erlin
g an
d Di
rk Z
imm
er
12:0
0-12
:25
Impr
oved
Aer
odyn
amic
Pre
dict
ion
Thro
ugh
Coup
led
Syst
em a
nd C
FD
Mod
els
Ed T
ate,
Joa
quin
Gar
golo
ff,
Brad
Dun
can,
Hub
ertu
s Tu
mm
esch
eit,
John
Gri
ffin
an
d Jo
hn B
atte
h
Appl
icat
ion
of R
icha
rdso
n Ex
trap
olat
ion
to th
e Co
-Sim
ulat
ion
of F
MU
s fr
om B
uild
ing
Sim
ulat
ion
Chris
toph
Cla
uss,
Kris
tin M
ajet
ta
and
Rich
ard
Mey
er
Opt
imiz
ing
the
star
t-up
pro
cess
of
post
-com
bust
ion
capt
ure
plan
ts b
y va
ryin
g th
e so
lven
t flow
rat
e
Thom
as M
arx-
Schu
bach
an
d Ge
rhar
d Sc
hmitz
Inve
stig
atio
n of
the
Influ
ence
of
Cont
rolle
r Ap
proa
ches
on
Room
Th
erm
al B
ehav
iour
–
A Si
mul
atio
n St
udy
Kris
tin M
ajet
ta, C
hris
toph
Cla
uss
and
Chris
toph
Nyt
sch-
Geus
en

7Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
SCIENTIFIC PROGRAM – TUESDAY MAY 16Ze
nit-N
adir
Tych
o-Ke
pler
Aqua
rius-
Taur
usLe
o-Vi
rgo
Auto
mot
ive
IICh
air:
Ed T
ate
Bui
ldin
gs II
Chai
r: M
icha
el W
ette
r E
lect
rica
l & P
ower
Sys
tem
s I
Chai
r: Di
etm
ar W
inkl
er C
ontr
ol S
yste
ms
IICh
air:
Bern
hard
Bac
hman
n
14:1
5-14
:40
Pow
ertr
ain
and
Ther
mal
Sys
tem
Si
mul
atio
n M
odel
s
of a
Hig
h Pe
rfor
man
ce E
lect
ric
Road
Veh
icle
Mas
sim
o St
ella
to, L
uca
Berg
iant
i an
d Jo
hn B
atte
h
Tem
plat
e ba
sed
code
gen
erat
ion
of M
odel
ica
build
ing
ener
gy
sim
ulat
ion
mod
els
Chri
stop
h N
ytsc
h-Ge
usen
, Al
exan
der
Inde
rfur
th,
Wer
ner
Kaul
, Kat
harin
a M
ucha
, Jö
rg R
ädle
r, M
atth
is T
hora
de
and
Carl
es R
ibas
Tug
ores
Sim
ulat
ion
of L
arge
Gri
ds
in O
penM
odel
ica:
refl
ectio
ns
and
pers
pect
ives
Fran
cesc
o Ca
sella
, Alb
erto
Lev
a
and
Andr
ea B
arto
lini
Fro
m s
yste
m m
odel
to
opt
imal
con
trol
- A
tool
cha
in fo
r th
e ef
ficie
nt s
olut
ion
of
opt
imal
con
trol
pro
blem
s
Man
uel G
räbe
r, Jö
rg F
ritzs
che
an
d W
ilhel
m T
eget
hoff
14:4
0-15
:05
Inve
stig
atin
g th
e Ef
fect
of a
Son
ic
Rest
rict
or in
the
Inta
ke o
f an
Engi
ne
Mau
ra G
alla
rott
i, Al
essa
ndro
Pi
care
lli a
nd M
ike
Dem
psey
Mod
ellin
g an
d Si
mul
atio
n of
St
anda
rdis
ed C
ontr
ol F
unct
ions
fr
om B
uild
ing
Auto
mat
ion
Geor
g Fe
rdin
and
Schn
eide
r,
Geor
g Am
bros
ius
Peßl
er
and
Sim
one
Stei
ger
A M
odel
ica-
base
d To
ol fo
r Po
wer
Sy
stem
Dyn
amic
Sim
ulat
ions
Glad
ys E
. Leo
n,
Fran
cois
P. B
eaud
e
and
Jean
-Bap
tiste
Hey
berg
er
Non
linea
r M
odel
Pre
dict
ive
Cont
rol
of a
The
rmal
Man
agem
ent S
yste
m
for
Elec
trifi
ed V
ehic
les
usin
g FM
I
Torb
en F
isch
er, T
om K
raus
, Ch
ristia
n K
irche
s
and
Fran
k Ga
uter
in
15:0
5-15
:30
Eng
ine
ther
mal
sho
ck te
stin
g pr
edic
tion
thro
ugh
cool
ant
and
lubr
ican
t cyc
ling
in D
ymol
a
Ales
sand
ro P
icar
elli,
Ed
uard
o Ga
lindo
an
d Ro
dolfo
Sol
er
Mod
ellin
g of
Hea
t Pum
ps w
ith
Calib
rate
d Pa
ram
eter
s Ba
sed
on
Man
ufac
ture
r Da
ta
Mas
sim
o Ci
mm
ino
an
d M
icha
el W
ette
r
A M
odel
ica
VSC-
HVD
C Av
erag
e Va
lue
Mod
el Im
plem
enta
tion
and
its S
oftw
are-
to-S
oftw
are
Valid
atio
n us
ing
an E
MT
Pow
er S
yste
m
Dom
ain
Spec
ific
Sim
ulat
or
Moh
amm
ed A
hsan
Adi
b M
urad
an
d Lu
igi V
anfr
etti
Defin
ing
and
Solv
ing
Hyb
rid
Optim
al C
ontr
ol P
robl
ems
w
ith H
ighe
r In
dex
DAEs
Rado
slaw
Pyt
lak,
Dam
ian
Susk
i, To
mas
z Ta
rnaw
ski
and
Tom
asz
Zaw
adzk
i
8Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
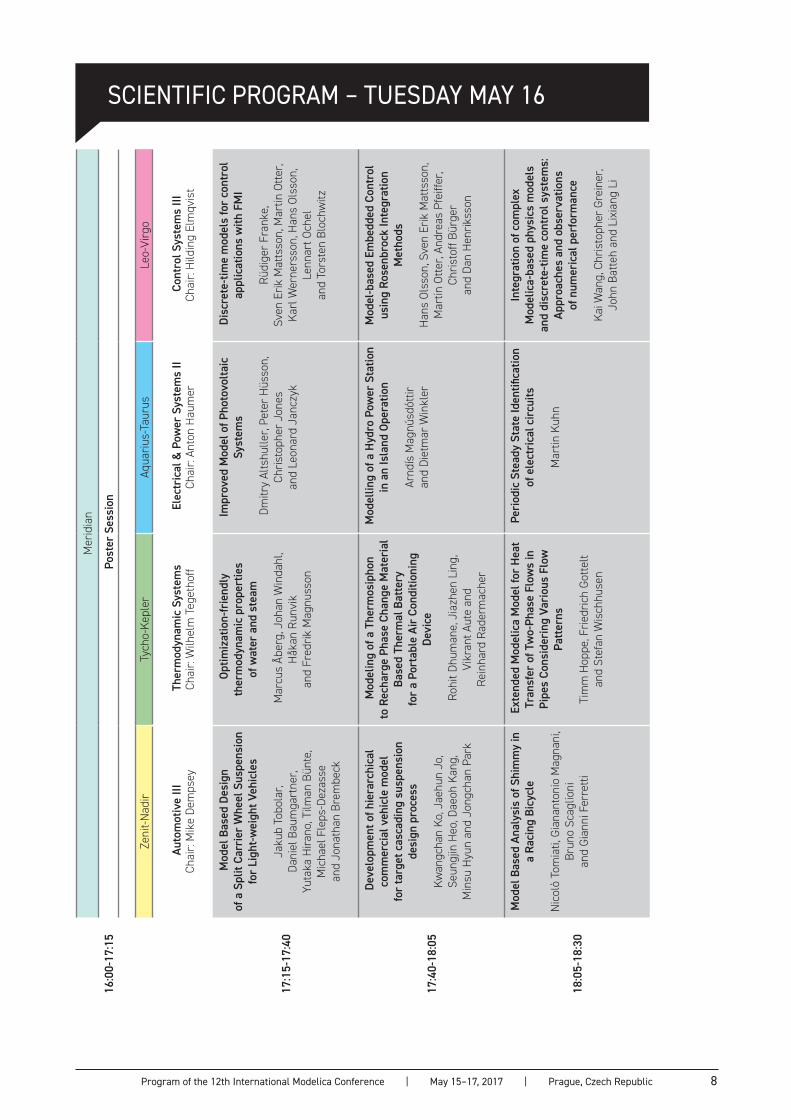
SCIENTIFIC PROGRAM – TUESDAY MAY 16M
erid
ian
16:0
0-17
:15
Pos
ter
Sess
ion
Zeni
t-Nad
irTy
cho-
Kepl
erAq
uariu
s-Ta
urus
Leo-
Virg
o
Aut
omot
ive
III
Chai
r: M
ike
Dem
psey
The
rmod
ynam
ic S
yste
ms
Chai
r: W
ilhel
m T
eget
hoff
Ele
ctri
cal &
Pow
er S
yste
ms
IICh
air:
Anto
n H
aum
er C
ontr
ol S
yste
ms
IIICh
air:
Hild
ing
Elm
qvis
t
17:1
5-17
:40
Mod
el B
ased
Des
ign
of
a S
plit
Carr
ier
Whe
el S
uspe
nsio
n fo
r Li
ght-
wei
ght V
ehic
les
Jaku
b To
bola
r,
Dani
el B
aum
gart
ner,
Yu
taka
Hira
no, T
ilman
Bün
te,
Mic
hael
Fle
ps-D
ezas
se
and
Jona
than
Bre
mbe
ck
Opt
imiz
atio
n-fr
iend
ly
ther
mod
ynam
ic p
rope
rtie
s
of w
ater
and
ste
am
Mar
cus
Åber
g, J
ohan
Win
dahl
, H
åkan
Run
vik
an
d Fr
edrik
Mag
nuss
on
Impr
oved
Mod
el o
f Pho
tovo
ltaic
Sy
stem
s
Dm
itry
Alts
hulle
r, Pe
ter
Hüs
son,
Ch
risto
pher
Jon
es
and
Leon
ard
Janc
zyk
Dis
cret
e-tim
e m
odel
s fo
r co
ntro
l ap
plic
atio
ns w
ith F
MI
Rüdi
ger
Fran
ke,
Sven
Erik
Mat
tsso
n, M
artin
Otte
r,
Karl
Wer
ners
son,
Han
s Ol
sson
, Le
nnar
t Och
el
and
Tors
ten
Bloc
hwitz
17:4
0-18
:05
Dev
elop
men
t of h
iera
rchi
cal
com
mer
cial
veh
icle
mod
el
for
targ
et c
asca
ding
sus
pens
ion
desi
gn p
roce
ss
Kwan
gcha
n Ko
, Jae
hun
Jo,
Seun
gjin
Heo
, Dae
oh K
ang,
M
insu
Hyu
n an
d Jo
ngch
an P
ark
Mod
elin
g of
a T
herm
osip
hon
to
Rec
harg
e Ph
ase
Chan
ge M
ater
ial
Base
d Th
erm
al B
atte
ry
for
a Po
rtab
le A
ir C
ondi
tioni
ng
Devi
ce
Roh
it Dh
uman
e, J
iazh
en L
ing,
Vi
kran
t Aut
e an
d
Rein
hard
Rad
erm
ache
r
Mod
ellin
g of
a H
ydro
Pow
er S
tatio
n in
an
Isla
nd O
pera
tion
Arnd
ís M
agnú
sdót
tir
and
Diet
mar
Win
kler
Mod
el-b
ased
Em
bedd
ed C
ontr
ol
usin
g Ro
senb
rock
Inte
grat
ion
Met
hods
Han
s Ol
sson
, Sve
n Er
ik M
atts
son,
M
artin
Otte
r, An
drea
s Pf
eiffe
r, Ch
risto
ff Bü
rger
an
d Da
n H
enrik
sson
18:0
5-18
:30
Mod
el B
ased
Ana
lysi
s of
Shi
mm
y in
a
Raci
ng B
icyc
le
Nic
olò
Tom
iati,
Gia
nant
onio
Mag
nani
, Br
uno
Scag
lioni
an
d Gi
anni
Fer
rett
i
Ext
ende
d M
odel
ica
Mod
el fo
r H
eat
Tran
sfer
of T
wo-
Phas
e Fl
ows
in
Pipe
s Co
nsid
erin
g Va
riou
s Fl
ow
Patt
erns
Tim
m H
oppe
, Frie
dric
h Go
ttelt
an
d St
efan
Wis
chhu
sen
Per
iodi
c St
eady
Sta
te Id
entifi
catio
n of
ele
ctri
cal c
ircu
its
Mar
tin K
uhn
Inte
grat
ion
of c
ompl
ex
Mod
elic
a-ba
sed
phys
ics
mod
els
and
disc
rete
-tim
e co
ntro
l sys
tem
s:
Appr
oach
es a
nd o
bser
vatio
ns
of n
umer
ical
per
form
ance
Kai W
ang,
Chr
isto
pher
Gre
iner
, Jo
hn B
atte
h an
d Li
xian
g Li
9Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
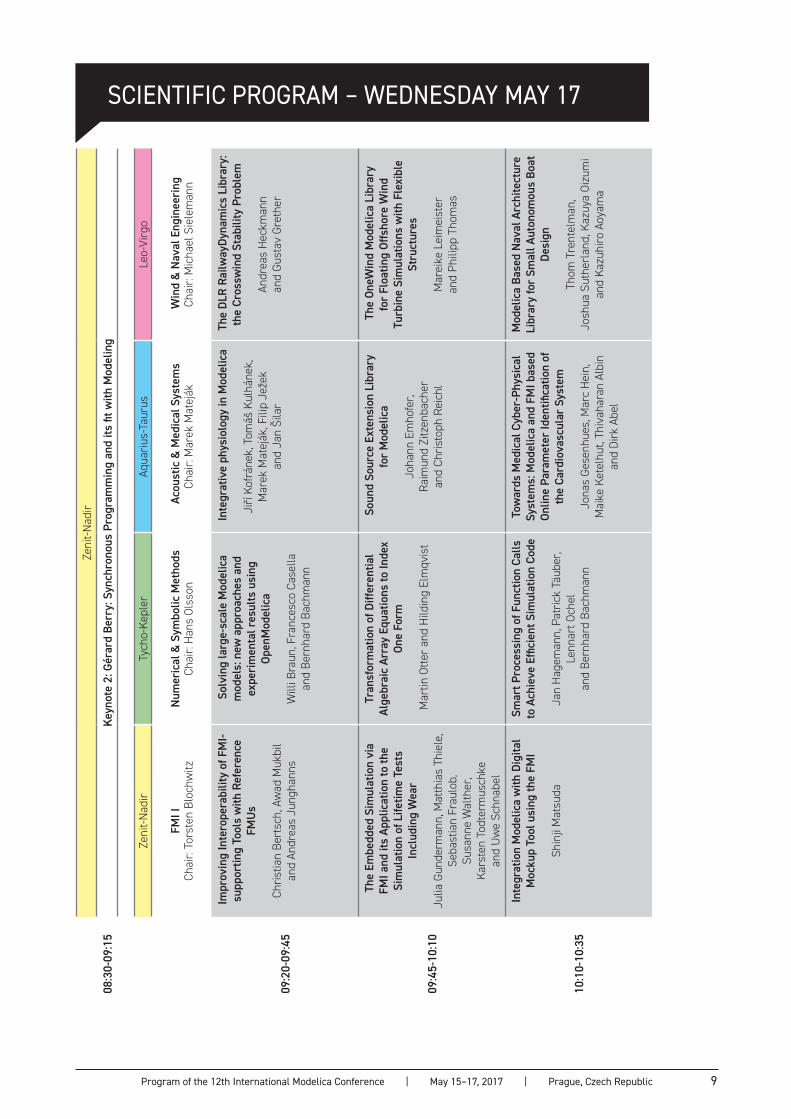
SCIENTIFIC PROGRAM – WEDNESDAY MAY 17Ze
nit-N
adir
08:3
0-09
:15
Keyn
ote
2: G
érar
d Be
rry:
Syn
chro
nous
Pro
gram
min
g an
d its
fit w
ith M
odel
ing
Zeni
t-Nad
irTy
cho-
Kepl
erAq
uariu
s-Ta
urus
Leo-
Virg
o
FMI I
Chai
r: To
rste
n Bl
ochw
itzN
umer
ical
& S
ymbo
lic M
etho
ds
Chai
r: H
ans
Olss
on A
cous
tic &
Med
ical
Sys
tem
sCh
air:
Mar
ek M
atej
ák W
ind
& N
aval
Eng
inee
ring
Chai
r: M
icha
el S
iele
man
n
09:2
0-09
:45
Impr
ovin
g In
tero
pera
bilit
y of
FM
I-su
ppor
ting
Tool
s w
ith R
efer
ence
FM
Us
Chris
tian
Bert
sch,
Aw
ad M
ukbi
l an
d An
drea
s Ju
ngha
nns
Sol
ving
larg
e-sc
ale
Mod
elic
a m
odel
s: n
ew a
ppro
ache
s an
d ex
peri
men
tal r
esul
ts u
sing
Op
enM
odel
ica
Will
i Bra
un, F
ranc
esco
Cas
ella
an
d Be
rnha
rd B
achm
ann
Inte
grat
ive
phys
iolo
gy in
Mod
elic
a
Jiří
Kofr
ánek
, Tom
áš K
ulhá
nek,
M
arek
Mat
eják
, Fili
p Je
žek
an
d Ja
n Ši
lar
The
DLR
Rai
lway
Dyna
mic
s Li
brar
y:
the
Cros
swin
d St
abili
ty P
robl
em
Andr
eas
Hec
kman
n
and
Gust
av G
reth
er
09:4
5-10
:10
The
Em
bedd
ed S
imul
atio
n vi
a FM
I and
its
Appl
icat
ion
to th
e Si
mul
atio
n of
Life
time
Test
s In
clud
ing
Wea
r
Julia
Gun
derm
ann,
Mat
thia
s Th
iele
, Se
bast
ian
Frau
lob,
Su
sann
e W
alth
er,
Kars
ten
Todt
erm
usch
ke
and
Uw
e Sc
hnab
el
Tran
sfor
mat
ion
of D
iffer
entia
l Al
gebr
aic
Arra
y Eq
uatio
ns to
Inde
x On
e Fo
rm
Mar
tin O
tter
and
Hild
ing
Elm
qvis
t
Sou
nd S
ourc
e Ex
tens
ion
Libr
ary
for
Mod
elic
a
Joha
nn E
mho
fer,
Ra
imun
d Zi
tzen
bach
er
and
Chris
toph
Rei
chl
The
One
Win
d M
odel
ica
Libr
ary
for
Floa
ting
Offs
hore
Win
d Tu
rbin
e Si
mul
atio
ns w
ith F
lexi
ble
Stru
ctur
es
Mar
eike
Lei
mei
ster
an
d Ph
ilipp
Tho
mas
10:1
0-10
:35
Inte
grat
ion
Mod
elic
a w
ith D
igita
l M
ocku
p To
ol u
sing
the
FMI
Shin
ji M
atsu
da
Smar
t Pro
cess
ing
of F
unct
ion
Calls
to
Ach
ieve
Effi
cien
t Sim
ulat
ion
Code
Jan
Hag
eman
n, P
atric
k Tä
uber
, Le
nnar
t Och
el
and
Bern
hard
Bac
hman
n
Tow
ards
Med
ical
Cyb
er-P
hysi
cal
Syst
ems:
Mod
elic
a an
d FM
I bas
ed
Onlin
e Pa
ram
eter
Iden
tifica
tion
of
the
Card
iova
scul
ar S
yste
m
Jona
s Ge
senh
ues,
Mar
c H
ein,
M
aike
Ket
elhu
t, Th
ivah
aran
Alb
in
and
Dirk
Abe
l
Mod
elic
a Ba
sed
Nav
al A
rchi
tect
ure
Libr
ary
for
Smal
l Aut
onom
ous
Boat
De
sign
Thom
Tre
ntel
man
, Jo
shua
Sut
herl
and,
Kaz
uya
Oizu
mi
and
Kazu
hiro
Aoy
ama

10Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
SCIENTIFIC PROGRAM – WEDNESDAY MAY 17Ze
nit-N
adir
Tych
o-Ke
pler
Aqua
rius-
Taur
usLe
o-Vi
rgo
FM
I II
Chai
r: An
drea
s Ju
ngha
nns
Mod
elic
a La
ngua
ge &
Too
ls
Chai
r: Pe
ter
Fritz
son
Mec
hani
cal S
yste
ms
Mod
ellin
g Ch
air:
Gian
ni F
erre
tti
HVA
C Sy
stem
sCh
air:
Stef
an W
isch
huse
n
11:0
5-11
:30
FM
I Go!
A s
imul
atio
n ru
ntim
e en
viro
nmen
t with
a c
lient
ser
ver
arch
itect
ure
over
mul
tiple
pro
toco
ls
Clau
de L
acou
rsiè
re
and
Tom
as H
ärdi
n
Inno
vatio
ns fo
r Fu
ture
Mod
elic
a
Hild
ing
Elm
qvis
t,
Toiv
o H
enni
ngss
on
and
Mar
tin O
tter
Obje
ct-o
rien
ted
mod
ellin
g of
a
flexi
ble
beam
incl
udin
g ge
omet
ric
nonl
inea
ritie
s
Davi
de In
vern
izzi
, Bru
no S
cagl
ioni
, Gi
anni
Fer
rett
i an
d Pa
olo
Albe
rtel
li
Cab
in T
herm
al N
eeds
: M
odel
ing
and
Assu
mpt
ion
Anal
ysis
Flor
ent B
requ
e
and
Mar
oun
Nem
er
11:3
0-11
:55
Exp
erim
entin
g w
ith M
atry
oshk
a Co
-Sim
ulat
ion:
Bui
ldin
g Pa
ralle
l an
d H
iera
rchi
cal F
MU
s
Virg
inie
Gal
tier,
Mic
hel I
anot
to,
Mat
hieu
Cau
jolle
, Ré
mi C
orni
glio
n,
Jean
-Phi
lippe
Tav
ella
, Jo
sé É
vora
Góm
ez,
José
Jua
n H
erná
ndez
Cab
rera
, Vi
ncen
t Rei
nbol
d
and
Enriq
ue K
rem
ers
Hie
rarc
hica
l Sem
antic
s
of M
odel
ica
Chr
isto
ph H
öger
Mus
culo
skel
etal
Mod
elin
g of
th
e H
and
and
Cont
act O
bjec
t in
Mod
elic
a
Shas
hank
Sw
amin
atha
n
and
Joha
n An
drea
sson
Sim
ulat
ive
Com
pari
son
of M
obile
Ai
r-Co
nditi
onin
g Co
ncep
ts fo
r M
echa
nica
l and
Ele
ctri
cal D
rive
n Sy
stem
s
Arni
m v
on M
anst
ein,
Di
rk L
impe
rich
an
d Sh
ivak
umar
Ban
akar
11:5
5-12
:20
Sca
ling
FMI-C
S Ba
sed
M
ulti-
Sim
ulat
ion
Beyo
nd T
hous
and
FMU
s on
Infin
iban
d Cl
uste
r
Step
hane
Via
lle,
Jean
-Phi
lippe
Tav
ella
, Che
rifa
Dad,
Re
mi C
orni
glio
n, M
athi
eu C
aujo
lle
and
Vinc
ent R
einb
old
Tow
ards
a S
tand
ard-
Conf
orm
, Pl
atfo
rm-G
ener
ic
and
Feat
ure-
Rich
Mod
elic
a De
vice
Dr
iver
s Li
brar
y
Bern
hard
Thi
ele,
Th
omas
Beu
tlich
, Vol
ker
Wau
rich,
M
artin
Sjö
lund
and
Tob
ias
Bellm
ann
Mod
elic
a Sp
ur G
ears
with
Her
tzia
n Co
ntac
t For
ces
Mar
kus
Dahl
, Håk
an W
ette
rgre
n
and
Hen
rik
Tide
felt
Dut
y Cy
cle
for
Low
Ene
rgy
Oper
atio
n of
a P
erso
nal
Cond
ition
ing
Devi
ce
Roh
it Dh
uman
e, J
iazh
en L
ing,
Vi
kran
t Aut
e
and
Rein
hard
Rad
erm
ache
r
12:2
0-12
:45
Dev
elop
men
t of a
n op
en s
ourc
e m
ulti-
plat
form
sof
twar
e to
ol
for
para
met
er e
stim
atio
n st
udie
s in
FM
I mod
els
Javi
er B
onill
a,
Jose
Ant
onio
Car
ballo
, Lid
ia R
oca
an
d M
anue
l Ber
engu
el
mod
elic
a.un
iver
sity
: A P
latfo
rm fo
r In
tera
ctiv
e M
odel
ica
Cont
ent
Mic
hael
Till
er
and
Diet
mar
Win
kler
Mod
elin
g of
Rol
ler
Bear
ings
Tobi
as W
eise
r
and
Burk
hard
Cor
ves
A P
latfo
rm fo
r th
e Ag
ent-
base
d Co
ntro
l of H
VAC
Syst
ems
Rooz
beh
Sang
i, Fe
lix B
ünni
ng,
Joha
nnes
Füt
tere
r
and
Dirk
Mül
ler
11Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
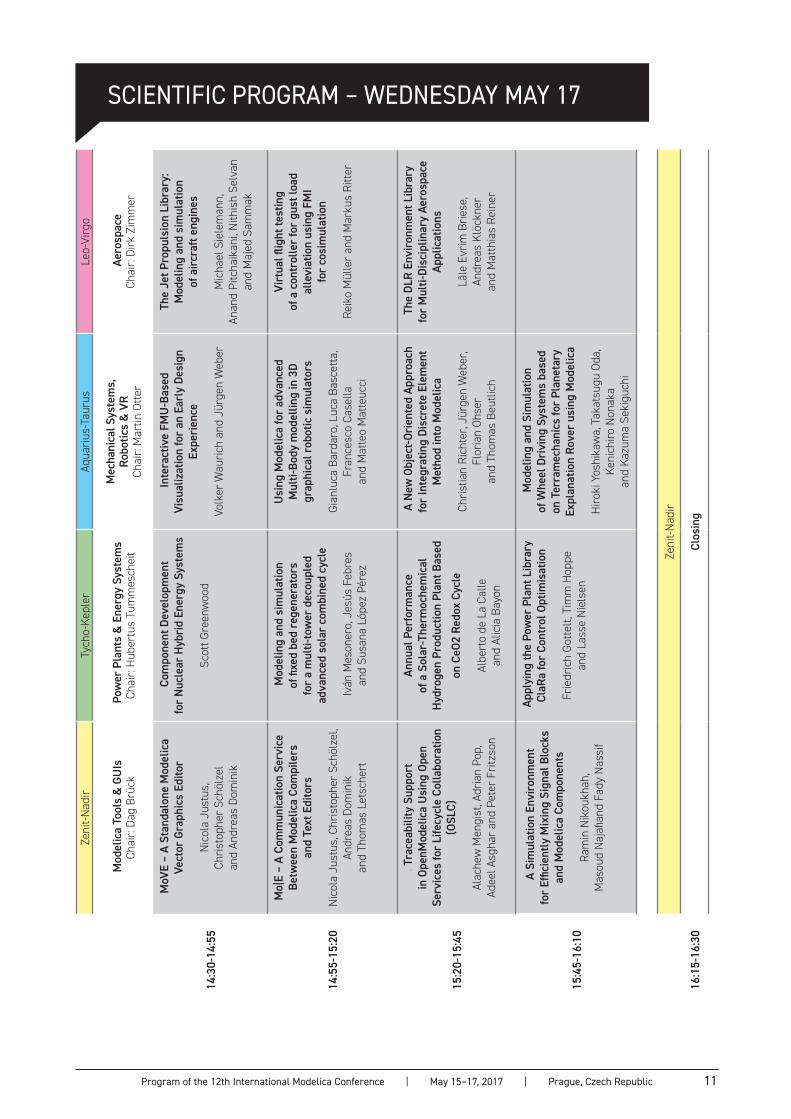
SCIENTIFIC PROGRAM – WEDNESDAY MAY 17Ze
nit-N
adir
Tych
o-Ke
pler
Aqua
rius-
Taur
usLe
o-Vi
rgo
Mod
elic
a To
ols
& G
UIs
Chai
r: Da
g Br
ück
Pow
er P
lant
s &
Ene
rgy
Syst
ems
Chai
r: H
uber
tus
Tum
mes
chei
t
Mec
hani
cal S
yste
ms,
Ro
botic
s &
VR
Chai
r: M
artin
Otte
r
Aer
ospa
ceCh
air:
Dirk
Zim
mer
14:3
0-14
:55
MoV
E –
A St
anda
lone
Mod
elic
a Ve
ctor
Gra
phic
s Ed
itor
Nic
ola
Just
us,
Chris
toph
er S
chöl
zel
and
Andr
eas
Dom
inik
Com
pone
nt D
evel
opm
ent
for
Nuc
lear
Hyb
rid
Ener
gy S
yste
ms
Scot
t Gre
enw
ood
Inte
ract
ive
FMU
-Bas
ed
Visu
aliz
atio
n fo
r an
Ear
ly D
esig
n Ex
peri
ence
Volk
er W
auric
h an
d Jü
rgen
Web
er
The
Jet P
ropu
lsio
n Li
brar
y:
Mod
elin
g an
d si
mul
atio
n
of a
ircr
aft e
ngin
es
Mic
hael
Sie
lem
ann,
An
and
Pitc
haik
ani,
Nith
ish
Selv
an
and
Maj
ed S
amm
ak
14:5
5-15
:20
Mo|
E –
A Co
mm
unic
atio
n Se
rvic
e Be
twee
n M
odel
ica
Com
pile
rs
and
Text
Edi
tors
Nic
ola
Just
us, C
hris
toph
er S
chöl
zel,
Andr
eas
Dom
inik
an
d Th
omas
Let
sche
rt
Mod
elin
g an
d si
mul
atio
n
of fi
xed
bed
rege
nera
tors
fo
r a
mul
ti-to
wer
dec
oupl
ed
adva
nced
sol
ar c
ombi
ned
cycl
e
Iván
Mes
oner
o, J
esús
Feb
res
an
d Su
sana
Lóp
ez P
érez
Usi
ng M
odel
ica
for
adva
nced
M
ulti-
Body
mod
ellin
g in
3D
grap
hica
l rob
otic
sim
ulat
ors
Gian
luca
Bar
daro
, Luc
a Ba
scet
ta,
Fran
cesc
o Ca
sella
an
d M
atte
o M
atte
ucci
Virt
ual fl
ight
test
ing
of
a c
ontr
olle
r fo
r gu
st lo
ad
alle
viat
ion
usin
g FM
I fo
r co
sim
ulat
ion
Reik
o M
ülle
r an
d M
arku
s Ri
tter
15:2
0-15
:45
. Tra
ceab
ility
Sup
port
in
Ope
nMod
elic
a U
sing
Ope
n Se
rvic
es fo
r Li
fecy
cle
Colla
bora
tion
(OSL
C)
Alac
hew
Men
gist
, Adr
ian
Pop,
Ad
eel A
sgha
r an
d Pe
ter
Fritz
son
Annu
al P
erfo
rman
ce
of a
Sol
ar-T
herm
oche
mic
al
Hyd
roge
n Pr
oduc
tion
Plan
t Bas
ed
on C
eO2
Redo
x Cy
cle
Albe
rto
de L
a Ca
lle
and
Alic
ia B
ayon
A N
ew O
bjec
t-Or
ient
ed A
ppro
ach
for
Inte
grat
ing
Disc
rete
Ele
men
t M
etho
d in
to M
odel
ica
Chris
tian
Rich
ter,
Jürg
en W
eber
, Fl
oria
n Oh
ser
an
d Th
omas
Beu
tlich
The
DLR
Env
iron
men
t Lib
rary
fo
r M
ulti-
Disc
iplin
ary
Aero
spac
e Ap
plic
atio
ns
Lâle
Evr
im B
riese
, An
drea
s K
löck
ner
an
d M
atth
ias
Rein
er
15:4
5-16
:10
A S
imul
atio
n En
viro
nmen
t fo
r Ef
ficie
ntly
Mix
ing
Sign
al B
lock
s an
d M
odel
ica
Com
pone
nts
Ram
in N
ikou
khah
, M
asou
d N
ajafi
and
Fady
Nas
sif
App
lyin
g th
e Po
wer
Pla
nt L
ibra
ry
ClaR
a fo
r Co
ntro
l Opt
imis
atio
n
Frie
dric
h Go
ttelt,
Tim
m H
oppe
an
d La
sse
Nie
lsen
Mod
elin
g an
d Si
mul
atio
n
of W
heel
Dri
ving
Sys
tem
s ba
sed
on T
erra
mec
hani
cs fo
r Pl
anet
ary
Expl
anat
ion
Rove
r us
ing
Mod
elic
a
Hiro
ki Y
oshi
kaw
a, T
akat
sugu
Oda
, Ke
nich
iro N
onak
a
and
Kazu
ma
Seki
guch
i
Zeni
t-Nad
ir
16:1
5-16
:30
Clos
ing

12Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
17. Large Scale Training through
Spoken Tutorials to Promote and use OpenModelica
.................................................. Kannan Moudgalya,
Bhargava Nemmaru, Kaushik Datta, Priyam Nayak, Rahul Jain,
Peter Fritzson and Adrian Pop
8. Model Reduction Techniques Applied to a Physical Vehicle Model for HiL
Testing..................................................
Romain Gillot, Alessandro Picarelli, Mike Dempsey and Stephen Gallagher
1. Generic FMI-compliant
Simulation Tool Coupling..................................................
Edmund Widl and Wolfgang Müller
18. Dymola-JADE Co-Simulation
for Agent-Based Control in Office Spaces
.................................................. Ana Constantin, Artur Löwen,
Ferdinanda Ponci, Kristian Huchtemann
and Dirk Müller
11. PDEModelica and Breathing
in an Avalanche..................................................
Jan Šilar, Filip Ježek and Jiří Kofránek
2. Modelling and Simulation of the passive Structure of
a 5-Axis-Milling Machine with rigid and flexible bodies for evaluating
the static and dynamic behaviour..................................................
Michael Schneider, Anton Haumer and Rupert Köckeis
14. EMOTH
The EMobility Library of OTH Regensburg
.................................................. Alexander Grimm and Anton Haumer
9. Towards Virtual Validation of ECU Software using FMI..................................................
Lars Mikelsons and Roland Samlaus
5. FMI and IP protection of models:
A survey of use cases and support in the standard
.................................................. Erik Durling, Elias Palmkvist
and Maria Henningsson
12. Failure Modes of Tearing
and a Novel Robust Approach..................................................
Ali Baharev, Arnold Neumaier and Hermann Schichl
13. Multirotor Aerial Vehicle
modeling in Modelica..................................................
Muhamed Kuric, Nedim Osmic and Adnan Tahirovic
7. Modeling and Simulation
on Environmental and Thermal Control System of Manned Spacecraft
.................................................. Sun Lefeng, Jin Jian, Chen Liping,
Liu Wei, Zhou Fanli and Liu Qi
4. A Power-Based Model of a Heating
Station for District Heating (DH) System Applications
.................................................. Abdulrahman Dahash,
Annette Steingrube and Mehmet Elci
3. Simulating a Variable-structure Model
of an Electric Vehicle for Battery Life Estimation
Using Modelica/Dymola and Python..................................................
Moritz Stüber
19. Parameter Estimation
based on FMI..................................................
Rüdiger Kampfmann, Danny Mösch and Nils Menager
16. Model-based virtual sensors
by means of Modelica and FMI..................................................
Mikel Gonzalez Cocho, Oscar Salgado, Jan Croes, Bert Pluymers
and Wim Desmet
15. Towards Adjoint and Directional
Derivatives in FMI utilizing ADOL-C within OpenModelica
.................................................. Willi Braun, Kshitij Kulshreshtha, Rüdiger Franke, Andrea Walther
and Bernhard Bachmann
10. Rotating Machinery Library
for Diagnosis..................................................
Tatsuro Ishibashi, Bing Han and Tadao Kawai
6. Modeling and simulation
of complex ThermoSysPro model with OpenModelica - Dynamic Modeling of a
combined cycle power plant
.................................................. Baligh El Hefni and Daniel Bouskela
POSTER SESSION – TUESDAY MAY 16
Poster session will start in Meridian at 16:00 and will last until 17:15

13Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
Application AccessDownload from Google Play or App Store the application App4Event. Then selectthe event Modelica 2017
ProceedingsThey are available at Modelica 2017 Proceedings Page https://modelica.org/events/modelica2017/proceedings or in the App4Event application for download
WIFI ConnectionFree wireless Internet will be available.Network: CongressUser: [email protected]: modelica2017
Registration DeskThe registration desk is open from Monday May 15 2017 12:00 throughout the whole conference.
ParkingHotel is connected with a shopping mall and has its own underground garage.
VoltageElectricity in Czech Republic is 230 Volts, alternating at 50 Hertz. The used power sockets are 2 round pin plugs (Type C and E).
Emergency Numbers112 – European Emergency Number(Police, Fire Service, Emergency Medical Service)158 – Police150 – Fire and Rescue Service155 – Emergency Medical Service1240 – Emergency Road Service444 – General InformationInternational Dialing Code of the Czech Republic +420
Tourist InformationFor more information about Prague, please go to http://www.prague.eu/en
Prague City Transport FaresThe hotel is located at Metro station Vysočanská and it is advised to travel to the city centre by the public transport.Passengers have to purchase their tickets before boarding the vehicle or entering the Metro system. The ticket is valid only if marked in the validation machine. Tickets can be bought at selected Metro stations or in Dopravní podnik information centres, hotels, at news stands, travel agencies, department stores, etc.32 CZK - valid for 90 minutes after marking24 CZK - valid for 30 minutes after markingAll tickets are valid for metro, trams and buses with possible transfer.
SOCIAL PROGRAM
Welcome Reception Monday May 15, 19.30. The welcome reception will take place at the Foyer of the conference floor.
Conference Dinner Tuesday May 16, 20.00at Národní Dům na Vinohradech.individual transportation, offered assistance: meeting point at 19.00 by the registration desk
PRACTICAL INFORMATION

14
SITE PLAN
Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
STELLA
CLOAKROOM
LOBBY BAR TEMPUS
16
A B C D
E
H
F
G
QUADRANT
VIRG
O
LEO
TAU
RUS
AQU
ARI
US
TYCHO KEPLER
MERIDIAN
ZENIT NADIR
FOYER
MERIDIANZENIT
NADIR QUADRANT
STELLA
FOYERVIRGO
LEO
TAURUS
AQUARIUS TYCHO
KEPLER
1 2 3
4 5 6 7 8 9
REGI
STRA
TION
DESK
COFFEEPOSTERS
EXHIBITION
The following companies/institutes will exhibit (alphabetic order):
Altair Engineering ............................................ F ANSYS .............................................................. A CENIT AG .......................................................... 1 Claytex Services ............................................... 4Concurrent Computer ...................................... 2Dassault Systèmes ...........................................G ESI ITI GmbH .................................................... CFAB Bertelmann Technologie ........................... 3FEV SA .............................................................. 6
LTX Simulation GmbH ......................................BMaplesoft .......................................................... EModelon ............................................................HNational Instruments ....................................... 9Open Source Modelica Consortium .................. 5Ricardo Software..............................................DSchlegel Simulation GmbH .............................. 7Wolfram ............................................................ 8

15Program of the 12th International Modelica Conference | May 15–17, 2017 | Prague, Czech Republic
EXHIBITORS
model and simulation complete system-level digital prototypes
Visit ANSYS at booth A to view some of the newest ANSYS Systems capabilities and learn from our hands-on in-booth demonstrations. You’ll discover:
• Multi-Domain System Modeling• Simulation-Based Testing: Multi-Domain System Simulation• Simulation-Based Testing: Analysis and Reporting
Session 4A: Automotive I
A Simulation-Based Digital Twin for Model-Driven Health Monitoring and Predictive Maintenance of an Automotive Braking System
Tuesday, May 16th - 10:45
Ryan Magargle, Lee Johnson - ANSYS Padmesh Mandloi, John Batteh and Anand Pitchaikani - MODELON
A Simulation-Based Digital Twin for Model-Driven Health Monitoring and Predictive Maintenance of an Automotive
GOLD SPONSORMODELICA CONFERENCE 2017
BOOTH A
GOLD SPONSOR
BOOTH A
www.ansys.com

SPONSORS
GOLD
SILVER
Altair focuses on the development and application of simulation technology to synthesize and optimize designs, processes and decisions for improved business performance. Privately held, Altair is headquartered in Troy, MI, USA, has more than 2,600 employees in over 45 offices throughout 20 countries, and serves more than 5,000 corporate clients.
Dassault Systèmes, the 3DEXPERIENCE Company, provides business and people with virtual universes to imagine sustainable innovations. Its world-leading solutions transform the way products are designed, produced, and supported. Dassault Systèmes delivers roles and applications, Dymola and CATIA Dymola Behavior Modeling, for System Modeling and Simulation, using the open Modelica language.
ANSYS is the global leader in engineering simulation. We bring clarity and insight to our customer‘s most complex design challenges through the broadest portfolio of fast, accurate and reliable simulation tools. Our technology enables organizations in all industries to imagine high-quality, innovative product designs that are sustainable and have an accelerated time to market. Founded in 1970, ANSYS employs almost 3000 professionals, more than 700 of them with PhDs in engineering fields such as finite element analysis, computational fluid dynamics, electronics and electromagnetics, embedded software, system simulation and design optimization. Headquartered south of Pittsburgh, U.S.A., ANSYS has more than 75 strategic sales and development locations throughout the world with a network of channel partners in 40+ countries.
MapleSim is a Modelica-based system-level modeling and simulation tool that applies modern techniques to dramatically reduce model development time, provide greater insight into system behavior, and produce fast, high-fidelity simulations. The combination of Modelica with the symbolic computation power of MapleSim enables a level of understanding, power, and extensibility not possible with “black-box” tools.
Claytex is an engineering consultancy specialised in systems engineering. Our core competency is in the modelling, simulation and analysis of complex multi-domain systems such as cars & aircraft, using Dymola & Modelica. Since 1999, we‘ve been working with some of the world‘s most respected Automotive, Motorsport/F1, Aerospace & Energy companies.
Modelon is a global expert in solutions for model-based systems and a leader in developing and supporting the Modelica and FMI open standards. Our open and flexible tools and model libraries for simulation and optimization accelerate virtual product creation and allow our customers to focus on their core business objectives.
Wolfram is the company where computation meets knowledge. For three decades, Wolfram has been a leader in knowledge-based programming, creating innovative technologies like Mathematica and the Wolfram Language. Wolfram SystemModeler brings this tradition of innovation to modeling and simulation.