Embed Size (px)
Citation preview

Integrating Induction, Deduction and Structure for Synthesis
Integrating Induction, Deduction and Structure for Synthesis
Sanjit A. Seshia
Associate ProfessorEECS Department
UC Berkeley
NSF ExCAPE Summer SchoolJune 12, 2013
Students & Postdocs: S. Jha, W.Li,A. Donze, L. Dworkin, B. Brady, D. Holcomb, J. Kotker, D. Sadigh
Collaborators: A. Tiwari, S. Gulwani, J. Deshmukh, X. Jin

– 2 –
Software Synthesis
Machine Learning (Theory)
Formal Verification
Connections in this TalkConnections in this Talk

– 3 –
Two MessagesTwo Messages
1. Synthesis Everywhere– Many problems can be solved effectively
when viewed as synthesis
2. Effective Approach: Induction + Deduction + Structure – Induction: Learning from examples– Deduction: Logical inference and constraint solving– Structure: Hypothesis on syntactic form of artifact
to be synthesized

– 4 –
Many Problems map to SynthesisMany Problems map to Synthesis Formal Verification
– Synthesis of “verification artifacts”– E.g.: Inductive invariants, abstraction functions
Formal Specification– E.g., synthesis of temporal logic formulas
Reverse Engineering– E.g., malware analysis
System Modeling– E.g., timing models for embedded platforms
…

– 5 –
Formal Verification as SynthesisFormal Verification as Synthesis
Inductive Invariants
Abstraction Functions

– 6 –
Example Verification ProblemExample Verification Problem
Transition System– Init: I
x = 1 y = 1– Transition Relation:
x’ = x+y y’ = y+x Property: = G (y 1) Attempted Proof by Induction:
y 1 x’ = x+y y’ = y+x y’ 1 Fails. Need to Strengthen Invariant: Find s.t.
x = 1 y = 1 y 1 x’ = x+y y’ = y+x ’ y’ 1

– 7 –
Example Verification ProblemExample Verification Problem
Transition System– Init: I
x = 1 y = 1– Transition Relation:
x’ = x+y y’ = y+x Property: = G (y 1) Attempted Proof by Induction:
y 1 x’ = x+y y’ = y+x y’ 1 Fails. Need to Strengthen Invariant: Find s.t.
x 1 y 1 x’ = x+y y’ = y+x x’ 1 y’ 1 Safety Verification Invariant Synthesis

– 8 –
One Reduction from Verification to SynthesisOne Reduction from Verification to Synthesis
SYNTHESIS PROBLEMSynthesize s.t.
I ’ ’
VERIFICATION PROBLEMDoes M satisfy ?
NOTATIONTransition system M = (I, ) Safety property = G()

– 9 –
Two Reductions from Verification to SynthesisTwo Reductions from Verification to Synthesis
NOTATIONTransition system M = (I, ), S = set of states Safety property = G()
SYNTHESIS PROBLEM #1Synthesize s.t.
I ’ ’
VERIFICATION PROBLEMDoes M satisfy ?
SYNTHESIS PROBLEM #2Synthesize : S Ŝ where
(M) = (I, ) s.t.
(M) satisfies iff
M satisfies
ˆ ˆ

– 10 –
Common Approach for both: “Inductive” SynthesisCommon Approach for both: “Inductive” Synthesis
Synthesis of:-
Inductive Invariants– Choose templates for invariants– Infer likely invariants from tests (examples)– Check if any are true inductive invariants, possibly
iterate
Abstraction Functions– Choose an abstract domain– Use Counter-Example Guided Abstraction
Refinement (CEGAR)

– 11 –
Counterexample-Guided Abstraction Refinement is Inductive SynthesisCounterexample-Guided Abstraction Refinement is Inductive Synthesis
Invoke Model
CheckerDone
Valid
Counter-example
CheckCounterexample:
Spurious?Spurious
Counterexample
YES
Abstract Domain
System +Property
Initial Abstraction
Function
DoneNO
Generate Abstraction
Abstract Model + Property
Refine Abstraction
Function
New Abstraction Function
Fail
SYNTHESIS VERIFICATION
[Anubhav Gupta, ‘06]

– 12 –
CEGAR = Inductive SynthesisCEGAR = Inductive Synthesis
INITIALIZE
SYNTHESIZE VERIFY
CandidateArtifact
Counterexample
Verification SucceedsSynthesis Fails
Structure Hypothesis, Initial Examples

– 13 –
CEGAR = Inductive Synthesis = Learning from (Counter)ExamplesCEGAR = Inductive Synthesis = Learning from (Counter)Examples
INITIALIZE
LEARNINGALGORITHM
VERIFICATIONORACLE
CandidateConcept
Counterexample
Learning SucceedsLearning Fails
“Concept Class”, Initial Examples

– 14 –
Active Learning: Key ElementsActive Learning: Key Elements
ACTIVELEARNING
ALGORITHM
1. Search Strategy: How to search the space of candidate concepts?
2. Example Selection: Which examples to learn from?
Examples
Search Strategy
SelectionStrategy

– 15 –
Counterexample-Guidance: A Successful Paradigm for Synthesis and LearningCounterexample-Guidance: A Successful Paradigm for Synthesis and Learning
Active Learning from Queries and Counterexamples [Angluin ’87a,’87b]
Counterexample-Guided Inductive Synthesis (CEGIS) [Solar-Lezama et al., ’06]– See upcoming lectures
Both rely heavily on Verification Oracle
Other effective active learning methods?– Especially when Verification Oracle is expensive

– 16 –
Induction + Deduction + StructureInduction + Deduction + Structure
Structure Hypotheses(on artifacts to be synthesized)
SKETCH,TEMPLATE,
Etc.
Deductive Procedure “Lightweight”: solves
lower complexity problem or special case of original
decision problem
Inductive ProcedureActive Learning: selects examples to learn from
S. A. Seshia, “Sciduction: Combining Induction, Deduction,and Structure for Verification and Synthesis”, DAC 2012

– 17 –
Reverse Engineering MalwareReverse Engineering Malware
Obfuscated code:Input: y Output: modified value of y
{ a=1; b=0; z=1; c=0;while(1) { if (a == 0) {if (b == 0) { y=z+y; a =~a;b=~b; c=~c; if (~c) break; }else {z=z+y; a=~a; b=~b; c=~c;if (~c) break; } }else if (b == 0) {z=y << 2; a=~a;}else { z=y << 3; a=~a; b=~b;}
} }FROM CONFICKER WORM
What it does:
y = y * 45
We solve this using program synthesis.
Paper: S. Jha et al., “Oracle-Guided Component-Based Program Synthesis”, ICSE 2010.

– 18 –
Reverse Engineering MalwareReverse Engineering Malware
Obfuscated code:Input: y Output: modified value of y
{ a=1; b=0; z=1; c=0;while(1) { if (a == 0) {if (b == 0) { y=z+y; a =~a;b=~b; c=~c; if (~c) break; }else {z=z+y; a=~a; b=~b; c=~c;if (~c) break; } }else if (b == 0) {z=y << 2; a=~a;}else { z=y << 3; a=~a; b=~b;}
} }FROM CONFICKER WORM
What it does:
y = y * 45
We solve this using program synthesis.
Paper: S. Jha et al., “Oracle-Guided Component-Based Program Synthesis”, ICSE 2010.
Loop-free compositions of “components” (+, -, <<, >>, *, if-then-else,…)
+Learning from Distinguishing I/O Examples
+SMT Solving (bit-vector arithmetic)

– 19 –
Synthesizing Switching Logic for Hybrid SystemsSynthesizing Switching Logic for Hybrid Systems
• SAFETY: Room Temperature x must lie between 20 and 22 C.• OPTIMALITY: Minimize switching between modes to save energy
?
?
?
?
Papers: S. Jha et al., ICCPS 2010 and EMSOFT 2011.

– 20 –
Synthesizing Switching Logic for Hybrid SystemsSynthesizing Switching Logic for Hybrid Systems
• SAFETY: Room Temperature x must lie between 20 and 22 C.• OPTIMALITY: Minimize switching between modes to save energy
?
?
?
?Guards are Hyperboxes
+Hyperbox Learning from +/- Examples
(safe/unsafe switching states)+
Numerical Simulation (constraint solving)
Papers: S. Jha et al., ICCPS 2010 and EMSOFT 2011.

– 21 –
Reactive Synthesis from LTLReactive Synthesis from LTL
SystemRequirements
EnvironmentAssumptions
SynthesisTool
Realizable
FSM
Unrealizable
Often due to missing environment assumptions!
s
e
e s
Paper: W. Li et al., “Mining Assumptions for Synthesis”, MEMOCODE 2011.

– 22 –
Reactive Synthesis from LTLReactive Synthesis from LTL
SystemRequirements
EnvironmentAssumptions
SynthesisTool
Realizable
FSM
Unrealizable
Often due to missing environment assumptions!
s
e
e s
Paper: W. Li et al., “Mining Assumptions for Synthesis”, MEMOCODE 2011.
Env Assumptions are Restricted GR(1)+
Version Space Learning (from Counterstrategies)
+(finite-state) Model Checking

– 23 –
OutlineOutline
Program Synthesis from Input-Output Examples Synthesizing Environment Assumptions for
Reactive Synthesis from LTL Conclusions and Future Directions

– 24 –
Reverse Engineering Malware by Program SynthesisReverse Engineering Malware by Program Synthesis
Obfuscated code:Input: y Output: modified value of y
{ a=1; b=0; z=1; c=0;while(1) { if (a == 0) {if (b == 0) { y=z+y; a =~a;b=~b; c=~c; if (~c) break; }else {z=z+y; a=~a; b=~b; c=~c;if (~c) break; } }else if (b == 0) {z=y << 2; a=~a;}else { z=y << 3; a=~a; b=~b;}
} }FROM CONFICKER WORM
What it does:
y = y * 45
We solve this using program synthesis.
Paper: S. Jha et al., “Oracle-Guided Component-Based Program Synthesis”, ICSE 2010.

– 25 –
Class of Programs: “Loop-Free”Class of Programs: “Loop-Free”
Programs implementing functions: I O
Functions could be if-then-else definitions and hence, the above represents any loop-free code.
P(I):O1 = f1 (V1)O2 = f2 (V2)…On = fn (Vn)
where
f1,f2,…,fn are functions from a given component library

– 26 –
ProblemProblem
Space of all possible programsEach dot represents semantically unique program
I/O OracleProgram Space
Specification Oracle
I/O Examples that identify the correct program?

– 27 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program
[Goldman & Kearns, 1995]

– 28 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program

– 29 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program
(i1, o1)
Example Set of programs ruled out by that example

– 30 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program
(i1, o1) - E1(i2, o2) - E2
………
(in, on) - En
Theorem: [Goldman & Kearns, ‘95]Smallest set of I/O examples to learn correct program
IS
Minimum size subset of {E1, E2, ……, En } that covers all the incorrect programs

– 31 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program
(i1, o1) - E1(i2, o2) - E2
………
(in, on) - En
Smallest set of I/O examples to learn correct design
IS
Minimum size subset of {E1, E2, ……, En } that cover all the incorrect programs
Practical challenge: can’t enumerate all inputs and find set Ei for each

– 32 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program
(i1, o1) - E1(i2, o2) - E2
………
(in, on) - En
ONLINE set-cover:
In each step, • choose some (ij,oj) pair• eliminated incorrect programs Ejdisclosed

– 33 –
Program Learning as Set CoverProgram Learning as Set Cover
Space of all possible programsEach dot represents semantically unique program
(i1, o1) - E1(i2, o2) - E2
………
(in, on) - En
ONLINE set-cover:
In each step, • choose some (ij,oj) pair• eliminated incorrect programs Ejdisclosed
Our heuristic:|Ej| 1: atleast one incorrect program identified
Efficient model counting could yield better algorithm

– 34 –
Our Approach: Learning based on Distinguishing InputsOur Approach: Learning based on Distinguishing Inputs
Space of all possible programsEach dot represents semantically unique program
[Jha et al., ICSE’10]

– 35 –
Space of all possible programs
Example I/O set E := {(i1,o1)}
Our ApproachOur Approach

– 36 –
Space of all possible programs
Example I/O set E := {(i1,o1)}
P1
P2
Our ApproachOur Approach
SMT
SMT

– 37 –
Space of all possible programs
Example I/O set E := {(i1,o1)}
P1
P2i2
Our ApproachOur Approach
SMT

– 38 –
Space of all possible programs
Example I/O set E := {(i1,o1)}
i2
(i2, o2)
Input/output Oracle
P1
P2
Our ApproachOur Approach
– 39 –
Space of all possible programs
Example I/O set E := E {(i2,o2)}
Our ApproachOur Approach
– 40 –
Space of all possible programs
Example I/O set E := E {(ij,oj)}
Our ApproachOur Approach

– 41 –
Space of all possible programs
Example I/O set E := E {(ik,ok)}
Our ApproachOur Approach

– 42 –
Space of all possible programs
Example I/O set E := E {(in,on)}
Semantically Unique Program
Correct Program?
Our ApproachOur Approach

– 43 –
SoundnessSoundness
Library of components is sufficient ?
Correct design
I/O pairs show infeasibility ?
YES
Infeasibility reported
Incorrect design
YES
NO
NO
Can invoke a Verification Oracle at the end and iterate
Conditional on Validity of Structure Hypothesis

– 44 –
Other Important DetailsOther Important Details
Novel encoding of the space of possible programs as an SMT formula
Obtain a feasible program for given set of input/output pairs using SMT solving
Obtain second feasible program and a distinguishing input using SMT solving
[Jha et al., ICSE ’10, PLDI ’11]

– 45 –
Result HighlightsResult Highlights
Malware Deobfuscation– Conficker worm– MyDoom and – survey paper on obfuscations by Collberg et al*
Synthesized over 35 bit-manipulation programs from Hacker’s delight (the “Bible of bit-manipulation”).
Program length: 3-15 Number of input/output examples: 2 to 13. Total runtime: < 1 second to 5 minutes.
*C. Collberg, C. Thomborson, and D. Low. A taxonomy of obfuscating transformations. Technical Report 148, Dept. Comp. Sci., The Univ. of Auckland, July 1997.

– 46 –
OutlineOutline
Program Synthesis from Input-Output Examples Synthesizing Environment Assumptions for
Reactive Synthesis from LTL Conclusions and Future Directions

Synthesis from LTL
47
SystemRequirements
EnvironmentAssumptions
SynthesisTool
Unrealizable
Realizable
FSM
Often due to incomplete environment assumptions!
s
e
e s

Satisfiability and Realizability
48
A LTL formula is satisfiable if there exists an infinite word (i.e. sequence of inputs and outputs) that satisfies .
A LTL specification is realizable if there exists a finite-state transducer M (e.g. a Moore machine) which, for any input sequence, generates computations that satisfies .

Problem Description
49
Goal:Generate additional assumptions to enable synthesis
Context:Original specification is satisfiable but unrealizable
Assume:- Given a few interesting user scenarios (satisfying traces) - Specifications are in the GR(1) class
Challenge:- Space of possible additional assumptions is huge-Want assumptions that can be understood and analyzed by a human user

Example
50
Inputs: request r and cancel c
Outputs: grant g
System specification s:- G (r X F g)- G(c g X g)
Environment assumption e: - True
No user scenarios.
Not realizable because the environment can force c to be high all the time

Our Contribution
Counterstrategy-guided synthesis of environment assumptions Demonstrated to generate useful/intuitive
environment assumptions for digital circuits and robotic controllers
[Wenchao Li et al., MEMOCODE 2011]
51

Approach for Synthesizing Environment Assumptions
Structure Hypothesis: Environment Assumptions are Restricted GR(1) properties
Deductive Engine:(Finite-state) Model Checking
Inductive Inference: Version Space Learning from Counterstrategies
+
+
52

Formulas in the form: e s
o Input and output partitions I and O.o
i: initial state formulas.o
t: transition formulas, in the form of G B, where B is a Boolean combination of variables in I O and expressions X u, u I if = e and u I O if = s.
o f: fairness formulas, in the form of G F B, where B is a
Boolean formula over I O.
o Synthesis as a turn-based two-player game between the system and the environmento Realizable if the system has a winning strategy, otherwise env
wins; Strategy representable as finite-state transducer
GR(1) Synthesis
53
{e, s}
[Piterman, Pnueli, Saar]

Counter-strategy and counter-trace
54
Counter-strategy is a strategy for the environment to force violation of the specification.
Counter-trace is a fixed input sequence such that the specification is violated regardless of the outputs generated by the system.

Example
55
System s:- G (r X F g)- G(c g X g)
A counter-trace:r: 1 1 (1)c: 1 1 (1)

CounterStrategy-Guided Environment Assumption Synthesis
56
FormalSpecification
Synthesis Tool
Realizable
Done
ComputeCounterstrategy
Unrealizable
Start
MineAssumptions
AddSpecificationTemplates
UserScenarios

Assumption Synthesis Algorithm
57
Generate Candidate φ
e.g. G F ?Specification
Templates
UserScenarios
Counter-strategy
Eliminate or Accept
Candidate
e.g. G F p
DoneAccept φ
Eliminate φ
(check consistency with existing assumptions)

Assumption Synthesis Algorithm
58
Generate Candidate φ
e.g. G F ?Specification
Templates
UserScenarios
Counter-strategy E
Invoke Model Checker: Does E satisfy φ ?
e.g. G F p
DoneYES: Accept φ
NO: Eliminate φ
VERSION SPACES:• Retain candidates
consistent with examples
• Traverse weakest to strongest
(check consistency with existing assumptions)

Assumption Templates follow GR(1)
59
1: G F ?b, where b I 2: G (?b1 X ?b2), where b1 I O and b2 I 3: G (?b1 ?b2), where b1, b2 I
The specification remains in GR(1) after the addition of new assumptions.
Occam’s Razor: Simple propositional structure generalizable Selecting candidate assumptions: (next slide)
Weakest to Strongest, with heuristics G F b weaker than G X b weaker than G b

Version Space Learning
G F p1
true
false
G F p2 G F pn
G X p1
G p1
G p1 p2
G p2 G pn
G pn-1 pn
G X pn
G (p1 X p2)
G X p2
. . .
. . .
. . .
. . .
. . .
. . .
STRONGEST (most specific)
WEAKEST (most general)
Originally due to [Mitchell, 1978]

Theoretical Results
61
Theorem 1: [Completeness] If there exist environment assumptions under our structure hypothesis that make the spec realizable, then the procedure finds them (terminates successfully). “conditional completeness” guarantee
Theorem 2: [Soundness] The procedure never adds inconsistent environment assumptions.
Example
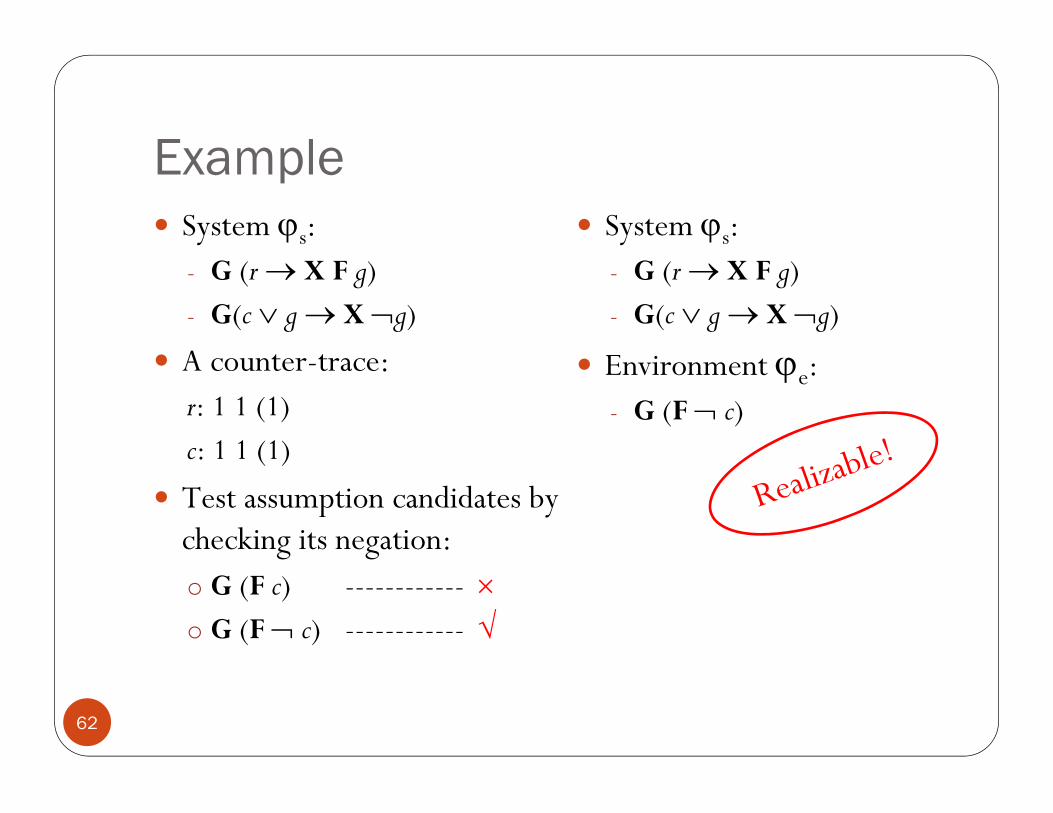
62
System s:- G (r X F g)- G(c g X g)
A counter-trace:r: 1 1 (1)c: 1 1 (1)
Test assumption candidates by checking its negation:o G (F c) ------------ o G (F c) ------------
System s:- G (r X F g)- G(c g X g)
Environment e:- G (F c)

Experimental Results Summary
63
Experiment Setup: - Remove assumptions from an originally realizable specification- Use a few (often a single) satisfying traces of the original
specification as representative user scenarios- Mine additional assumptions until the specification is realizable
Use Cadence SMV to generate the satisfying traces and model check the counter-strategies
Use RATSY [Bloem et al. 2010] to check realizability of the specifications and compute the counter-strategies and counter-traces in case of unrealizability

Result Summary:- Case studies in existing literature: AMBA AHB, IBM Gen
Buffer, robotic vehicle controller, etc.- Recovered the missing assumption in most cases- AMBA AHB Example:
Experimental Results Summary
64
Mined assumption:G (F HLOCK[0] = 0)
Original assumption:G (HLOCK[0] = 1 → HBUSREQ[0] = 1)
Master 0 requests locked access to the bus
Master 0 requests access to the bus

– 65 –
OutlineOutline
Switching Logic Synthesis for Hybrid Systems Reflections on the Approach Synthesizing Environment Assumptions for
Reactive Synthesis from LTL Conclusions and Future Directions

– 66 –
Induction + Deduction + StructureInduction + Deduction + Structure
Structure Hypothesis encodes human insight about form of artifact to be synthesized
Synthesis procedure combines inductive inference with deductive reasoning
Many instances of this approach exist already
Key Points of Difference between instances:1. Search Strategy: How to search the space of
candidate concepts?2. Example Selection: Which examples to learn from?3. Deductive Oracles

– 67 –
Comparison of Three ApproachesComparison of Three Approaches
Search Strategy for Candidate Programs
Example Selection Strategy
“Traditional”Counterexample-Guided Synthesis
Determined by Constraint Encoding & Solver Heuristics
Counter-Exampleguided
Program Synthesis from I/O Examples
Determined by Constraint Encoding & Solver Heuristics
Distinguishing Inputguided
Env Assumption Generation for LTL Synthesis
Version SpacesCounter-Strategy(counter-example) guided

– 68 –
Ongoing and Future WorkOngoing and Future Work Many Other Applications
– Switching logic synthesis for safety and optimality [Jha et al ’10,’11]
– Fixed-point code from floating-point [Jha & S, ’11, ’13]– Synthesizing Abstractions for Hardware Verification
[Brady et al., ’11]– Synthesizing Requirements for Industrial Control Models
[Jin et al, ’13]– …
Need better understanding of Inductive Synthesis – Explore range of learning models– Role of structure hypothesis– Control over deductive oracles (e.g., via problem encoding
/ search strategy in SAT/SMT)





























