Embed Size (px)
DESCRIPTION
Integrated Management of Power Aware Computing & Communication Technologies. PI Meeting Nader Bagherzadeh, Pai H. Chou, Fadi Kurdahi University of California, Irvine, ECE Dept. DARPA Contract F33615-00-1-1719 April 18-20, 2001 San Diego, CA. Outline. Introduction - PowerPoint PPT Presentation
Citation preview

1
Integrated Management of Power Aware Computing & Communication
TechnologiesPI Meeting
Nader Bagherzadeh, Pai H. Chou, Fadi KurdahiUniversity of California, Irvine, ECE Dept.
DARPA Contract F33615-00-1-1719
April 18-20, 2001
San Diego, CA

2
Outline
Introduction Status overview, Application
Accomplishments to date Scheduling Component power models and simulators Architecture configuration: Mode Selection
Metrics
Review of program milestones and goals Fulfilled: prototype of scheduling/planning tool Upcoming: integration with COPPER project, dynamic scheduling
Future planned evaluation
Development platforms, tools, metrics
Transition plan.

3
Applications
Space Mars Pathfinder X-2000 architecture
[new] NASA Deep Impact JPL-led effort, with PowerPC 750 testbed (measures power) Mission planning, software architecture level
ATR Needs algorithm-level parallelization and arch. (DSP, FPGA) first System-level pipeline scheduling
UCAV thermal battery scheduling

4
Personnel & teaming plans
UC Irvine - Design tools Nader Bagherzadeh Pai Chou Fadi Kurdahi Jinfeng Liu Dexin Li Duan Tran
USC - Component power optimization Jean-Luc Gaudiot Seong-Won Lee
JPL - Applications and benchmarking Nazeeh Aranki Nikzad “Benny” Toomarian
students
student

5
Quad Chart
Innovations Component-based power-aware design
Exploit off-the-shelf components & protocols Best price/performance, reliable, cheap to replace
CAD tool for global power policy optimization Optimal partitioning, scheduling, configuration Manage entire system, including mechanical & thermal
Power-aware reconfigurable architectures Reusable platform for many missions Bus segmentation, voltage / frequency scaling
Impact
Enhanced mission success More task for the same power Dramatic reduction in mission completion time
Cost saving over a variety of missions Reusable platform & design techniques Fast turnaround time by configuration, not redesign
Confidence in complex design points Provably correct functional/power constraints Retargetable optimization to eliminate overdesign Power protocol for massive scale
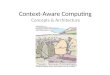
Behavior
Architecture
high-levelsimulation
functionalpartitioning& scheduling
compositionoperators
high-levelcomponents
behavioralsystem model
busses, protocols systemarchitecture
mapping system integration& synthesis
staticconfiguration
dynamic powermanagement
parameterizablecomponents
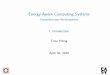
2Q 00
Kickoff
2Q 01 2Q 02
Static & hybrid optimizations partitioning / allocation scheduling bus segmentation voltage scaling
COTS component library
FireWire and I2C bus models
Static composition authoring
Architecture definition
High-level simulation
Benchmark Identification
Dynamic optimizations task migration processor shutdown bus segmentation frequency scaling
Parameterizable components library
Generalized bus models
Dynamic reconfiguration authoring
Architecture reconfiguration
Low-level simulation
System benchmarking
Year 1 Year 2

6
Program Overview
Power-aware system-level design Amdahl's law applies to power as well as performance Enhance mission success (time, task) Rapid customization for different missions
Design tool Exploration & evaluation Optimization& specialization Technique integration
System architecture Statically configurable Dynamically adaptive Use COTS parts & protocols

7
Accomplishments to date
Power-aware scheduling -- DEMO Multiple processors, mechanical, thermal Min / Max power and timing constraints Power-aware Gantt chart user interface Pipelining at system-level
Architectural optimization Bus topology optimization, segmentation Mode selection for power & timing
Component power models and simulators Performance simulator Parameterized energy model
Interface to COPPER project

8
Power-Aware Scheduling
New constraint-based application model [paper at Codes'01] Min/Max Timing constraints
Precedence, subsumes dataflow, general timing, shared resource Dependency across iteration boundaries – loop pipelining Execution delay of tasks – enables frequency/voltage scaling
Power constraints Max power – total power budget Min power – controls power jitter or force utilization of free source
System-level, multi-scenario scheduling [paper at DAC'01] 25% Faster while saving 31% energy cost Exploits "free" power (solar, nuclear min-output)
System-level loop pipelining [working papers] Borrow time and power across iteration boundaries Aggressive design space exploration by new constraint classification Achieves 49% speedup and 24% energy reduction

9
Prototype of GUI scheduling tool
Power-aware Gantt chart Time view
Timing of all tasks on parallel resources
Power consumption of each task Power view
System-level power profile Min/max power constraint, energy
cost
Interactive scheduling Automated schedulers – timing,
power, loop Manual intervention – drag &
drop
Demo available

10
Architectural Configuration
Mode selection Power consumption level (doze, nap, sleep, etc.) Low power design techniques
Clock scaling, voltage scaling Memory/cache configurations, bus encoding Communication protocols, compression, algorithm transformations
Optimize feasible solutions for energy/timing costs Power, Real time, Inter-resource modes constraints Constraints between functionality modes and resources modes
Functionality mode and resource modes
Bus topology optimization Static clustering and bus partitioning Dynamic reclustering with shutdown

11
Component power model
Performance simulator-drive power estimation Independent performance simulator and power estimation modules Modular, can be replaced with other model, extensible
Performance simulator for SMT, up to 8 threads, emulates single thread superscalar CPU Executes Alpha EV6 binaries, emulates Alpha 21264
Power estimation model Parameterizable power model for HW modules in microarchitecture Moving average model for power profile Inputs microarchitectural params, # accesses (activity factor)

12
Metrics
Source-aware energy model Takes “free energy” into account Cost for not using free energy
Profile-aware Total energy dependent on consumers’ power profile Smoothness of power draw
Scenario-aware Cost function tracks external factors (e.g. temperature, solar level) Stage in mission
Timing/performance Makespan (length of an iteration) Dynamic planning cost

13
Review of Milestones & Goals
Accomplished UI prototype Power-aware scheduling [3 papers]
Multi-scenario System-level pipelining
Mode selection encompass power mgmt (voltage/freq scaling)
Processor power & simulation models
Upcoming Dynamic optimization
Scheduling Architectural reconfiguration
Library of parameterizable bus models Tool integration
IMPACCT tools and library between IMPACCT and COPPER

14
Future planned evaluation
Deep Impact from JPL Mission planning and scheduling example Image compression (wavelet) algorithm Architectural mapping
JPL Testbed PPC750 board to measure actual power PPC750 to simulate instrumentation in real-time advanced board with real instrumentation
Validation through COPPER Scheduler output fed to COPPER for compilation Compare estimated power with refined version

15
Technology Transition --Consystant Design Technologies
Beta just released Apr.11 shown at ESC runs on Linux will support Solaris, Win2k
Extensible system platform plugin for synthesis targets Linux, vxWorks, …
Simulator selective focus coordination centric

16
Development plans
Scripting and web-based tool Jython (Java + Python) for GUI prototype Core scheduler
Modular, detachable from GUI Option to run on separate server or same process as UI
CGI scripts for arch. configuration (unix/web based) Latest version distributed thru WebCVS
Interface with commercial CAD backend Detailed power estimation tools Functional simulation with proprietary models
Rationale Open source, runs on any platform All publicly available development tools Trivial to install, no compilation, encourage modification

17
http://www.ece.uci.edu/impacct/

18
Application requirements
System specification 6 wheel motors 4 steering motors System health check Hazard detection
Power supply Battery (non-rechargeable) Solar panel
Power consumption Digital
Computation, imaging, communication, control Mechanical
Driving, steering Thermal
Motors must be heated in low-temperature environment