Embed Size (px)
Citation preview

Research Collection
Doctoral Thesis
De la précision des liaisons indirectes en triangulation
Author(s): Perret, Charles André
Publication Date: 1960
Permanent Link: https://doi.org/10.3929/ethz-a-000104552
Rights / License: In Copyright - Non-Commercial Use Permitted
This page was generated automatically upon download from the ETH Zurich Research Collection. For moreinformation please consult the Terms of use.
ETH Library

PROMOTION No. 2844
DE LA PRÉCISION DES LIAISONS INDIRECTES
EN TRIANGULATION
THÈSE
PRÉSENTÉE
A L'ÉCOLE POLYTECHNIQUE FÉDÉRALE, ZURICH
POUR L'OBTENTION
DU GRADE DE DOCTEUR ES SCIENCES TECHNIQUES
PAR
CHARLES ANDRÉ PERRET
ing. top. dipl. E. P. F.
de La Sagne (NE)
Rapporteur: Prof. Dr. F. Kobold
Corapporteur: Prof. Dr. C. F. Baeschlin
JURIS-VERLAG ZORICH
1960

A la me'moîre de mon père
et
à ma femme

DE LA PRECISION DES LIAISONS INDIRECTES
EN TRIANGULATION
Table des matières
p-ïge
CHAPITRE I 1
Objet de cette étude. 1
1. Introduction. 1
2. Exposition du problème par un exemple. 1
CHAPITRE II 4+
De la précision des angles implicites dans le problene de liansen. 4
1. Généralités. 4
2. Méthode analytique, par application directe de la loi de
propagation des erreurs. 6
3. Méthode géométrique. 11
4. Relation entre la néthode analytique et la méthode géonétrique. 19
5. Comparaison de différentes néthodes 22
CHAPITRE III 23
De la forme et des poids à donner aux éléments du problene de la
liaison indirecte d'après Hanscn pour obtenir un résultat optircun. 23
,1. Généralités. 23
2. Précision requise sur les angles observés pour obtenir une
précision fixée d'avance sur les angles implicites.(Problene inverse). 24
3. De diverses formes types du réseau auxiliaire. 25
4. Fornes de type I. 28
5. Ponr.es de type II. 48
6. Fornes de type III. 51
7. Formes de type IV. 52
S. Combinaison entre les poids des angles .observés et la forme
du Réseau auxiliaire. 54
9. Résumé 54

page
OHAPITRS IV'
55
Raccordement au réseau principal. 55
1. Généralités. 55
2. Exemple numérique théorique. 57
3. Principe du raccordement. 73
U* Différents aspects du raccordement. 75
A. Avec observation des angles 0 s y> * y et -p = <p * &' 75
B. Avec différentes méthodes d'observations az.bmtales. 76
C. Discrimination de cas généraux de raccordement. 76
5. Incorporation de la direction fictive aux autres
directions d'une station. 77
A. Méthode des séries ou tours d'horizon. 77
B. Méthode des couples sur référence. 79
C. Méthode par mesure directe des angles (Schreiber). 81
D. Méthode des secteurs. 83
CHAPITRE V. • 85
Conclusions et applications. 85
1. Récapitulation. 85
2. Applications. 86
A. Résolution de problèmes similaires à celui présentéan paragraphe 1.2. 86
B. Mesure d'un angle en un point inaccessible. 86
C. Mesure d'une station excentrique a partir d'une autre
station excentrique. 86
D. Passage d'une crête inaccessible par une chaîne de
quadrilatères. 86
BIBLIOGRAPHIE 88
CURRICULUM VITAE 89

_"I
_
CHAPITRE I
Objet de cette étude
I. î. INTRODUCTION
Un réseau de triangulation primordiale se présente rarement sous la
forme régulière et homogène indiquée par la théorie. La configuration du
terrain et d'autres obstacles peuvent empêcher l'observation de certaines
visées qui seraient nécessaires à l'obtention d'un réseau homogène. U est
possible, jusqu'à un certain point, de remédier à cet inconvénient par des
artifices. La liaison indirecte d'après îîansen est un de ces artifices.
Dans cette thèse, nous nous bornerons à cette méthode qui, par l'introduc¬
tion de stations auxiliaires, nous permet de rétablir indirectement les
iiaisons manquantes d'un réseau. L'objet de ce travail est l'étude des con¬
ditions à réaliser pour que les liaisons fictives ainsi obtenues s'incorpo¬rent harmonieusement à 1- ensemble des liaisons directement observées, for¬
mant ainsi un système homogène»
I. 2. EXPOSITION PU PROBLEME PAR UN EXEMPLE
Soit le réseau donné par la figure 1 où la visée A-«—«-B est impossible
G
F^~
H
FIGURE 1 : Réseau principal
Pour le calcul définitif du réseau, il serait intéressant d'en rétablirson homogénéité par un artifice qui donnerait la valeur de la directionA—»B avec son poids. H serait en outre commode que le poids de cette di¬rection soit le mSme que le poids des autres directions du réseau ou toutau moins à celui des directions observées sur les stations A et B respec¬tivement.
Si nous introduisons deux stations auxiliaires S, et S*, desquelles
nous pouvons observer respectivement les directions S, A , S,B , S, S* etS2A , 5jS,, S, 8 (Fig. 2), nous pouvons calculer les angles cp, y, 'p,eb *p'"(Problème de Koiisen).

- 2 -
Nous pouvons également déterminer les pcidc de ces angles par les r.6-
thodes développées plus loin (voir Chapitre II).
FIGURE 2 : Introduction de stations auxiliaires
I'incorporation ce la directe n A-«-»B aux stations A et B s'obtient
par l'obscrvaticn de l'un ou l'autre ou des deux oncles de raccordement,
g- , <r pour- la station A et r, >
°lr tiour la station B.
es, stcr
S,G c*i -
G G
FIGURE 3 :
Détail du réseau auxiliaire et de son
raccordement au réseau principal

Connaissant les angles implicites y et V et leur poids et les anglesde raccordement <rffS ou cs c
(ou les deux) et leur poids, nous connaissons
ainsi les angles coe's ou a>BC (ou les deux) et leur poids, c'est-à-dire qu'ilnous est des lors possible de combiner la direction A-B aux autres directions
observées de la station A (Développement analogue pour la station B).Remarquons en passant que les stations A et B sont accessibles dans la
grande majorité des cas (quelques exceptions sont indiquées au chapitre V),On pourra donc observer les angle" S,jiSj=0= y + <p'
et S> B S, = yy = </> * </>' ce qui aura pour effet d'augmenterla précision du réseau auxiliaire A S, B S* .
Si les stations secondaires S, et S* sont convenablement choisies et
si des poids idoines sont donnés aux angles auxiliaires ce, oc', JB et fi'de même qu'aux angles de raccordement cei/ , <?SjtC et cSG , cC5i ainsi qu'auxangles / et *p on peut alors compléter harmonieusement les observations des
stations A et B et rétablir ainsi l'homogénéité du réseau (Yoir Chapitre 17).L'incorporation rigoureuse de la liaison A-B dans le système primordial
devrait se faire en introduisant dans la compensation du réseau général les
stations secondaires S; et S2 et toutes les observations relatives a ces
stations au même titre que toutes lea autres stations et toutes les autres
observations.
H est évident que si l'on choisissait cette méthode, on jne pourraitplus parler de liaison indirecte et ce travail serait sans objet.
Il s'agit donc de remplacer la figure auxiliaire A S,B S2 par la di¬
rection fictive A-B en vue d'alléger la compensation de l'ensemble du ré¬
seau et d'examiner dans quelle mesure cette substitution est tolérable.
Nous voyons donc que ce probiene peut se décomposer en deux phasesbipn distinctes.
1. Etude de la figure auxiliaire A S, B S2 quant à sa forme et aux
poids à donner aux observations ci , ce', /s et g'ainsi qu'aux, angles/ et typour obtenir une précision maxima des angles implicites <p t 9' > <fi et je'
2. Etude du raccordement de la direction fictive A-B, obtenue par le
calcul, au réseau principal de triangulation.Ces deux phases serrmt détaillées dans les chapitres qui suivent.

CHAPITRE I
De la précision des cinglas implicites dans le problème de Hansen
E. I .GENERALITES
Nous avons vu dans le chapitre précédent que le premier pas à franchir
pour arriver à la solution de notre problème est la détermination de la
grandeur et de la précision d'angles non observés.
Pour le moment, considérons uniquement la figure 3 qui représente le
réseau auxiliaire de la figure 2 introduit entre les points A et B du ré¬
seau principal.La visée A*—«-B étant matériellement impossible, les angles oc
, ce', fi ,
et /S' sont seuls observés. C'est le problème bien connu dit "de Hansen"
dont plusieurs solutions ont été données par des auteurs différents ^voir[5] pages 463 - AU).
ïïous donnerons ici un bref rappel de la solution directe dont les équa¬tions finales, publiées par Lindemahn et Firmenich dans "Zeitschr. f. Verra.
1879, S. 196, 256 und 1880 S. 58 (cf. [5] p. 466j serviront de point de dé¬
part pour la détermination de la précision des angles implicites ç» , p', <ft ,
et 4J' par la méthode directe développée dans le paragrapne suivant de ce
chapitre.Il convient de mentionner ici l'étude, faite par le Dr. 0. Eggert et
publiée dans "Zeitschrift fur Vermessungovesen" BandXL, Heft I, 1. Januar
1911, qui traite de la précision de la détermination des points par le pro¬blème de Hansen. Cependant, comme le titre"l'indique, le Dr. Eggert ne
traite que de la précision ponctuelle ,ct le problème qui nous intéresse est
celui de l'étude de la précision angulaire.
Nous partons de l'expression t,'~t~~ l (M. 1.1) (voir figure à)
3 a. a. '
S,
^ B
FIGURE 4 :
Problème de Hansen
Dénomination des éléments
où nous remplaçons les trois quotients par les rapports des sinus des anglescorrespondants, ce qui donne
s!n <P Sin(ct.'+J3') sinj3_ m 1 3 1
Sin («. + #)' sin(f>''
sin fi'-i U-U-L.*.;

- 5 -
maiesin cp' = sin ( cp * ot * oc') (11.1.3.)
en remplaçant et séparant les expressions en cp ,
sin ( p * oc * oc) sin ( oc' * fi') sin fi
sin ç» sin ( oc + fi) sin fi'
en transformant
sin cp cos ( o( * oc') + cos cp sin (oc* oc')_
sin Çoc'* /S')sin fi
sin cp~
sin (oc *jB) sin fi'
En procédant de façon analogue pour les autres angles, nous obtien
drons finalement
(II.1.4.)
(11.1.5.)
COtff Cp s - COtff ( oc* oc') +
i sin (oc* fi') sin fi _ F,sin (oc * oc') sin (oc * fi) sin fi'
~
cote? Cp's- cotg (oc * oc') *s sin (oc. * fi) sin fi'
_
F*sin (oc * oc') sin (oc'*fi') sin fi
~
cotg ip = - £0*9 (fi* fi') +t sin («' * fi')sin oc
_
Fssin (fi*fi') sin (oc*JS) sinoi"~
COtff çp'-- cotg (/S * /S') +1 sin (oc* fi) sin oc'_
F>sin (fi * fi') sin (oc'*fi')sin oc~
(II.1.6.)
(II.1.7.)
(II.1.8.)
(II.1.9.)
Cette solution au problème de Hancen nous a parue la plus favorable
pour l'analyse de la précision des angles implicites, car sous cette for¬
me, chacun d'eux est donné directement en fonction des seules observrttions.
Cependant, pour la détermination des grandeurs cp t cp' 3 tp et ç/' la
solution donnée par Delanbre (cf. [5] sveiter Band, erster Halband S.467.)nous parait plus indiquée. Nous rappelons brièvement le développement de
cette solution.
Dans la figure 4 nou3 voyons que
cp * <P2
~ 90°
c=
sin fi' sin ( oc* oC')
cL sin oc' sin (fi * fi')
sin fi' sin (oc* oc')
OC + fi~
2
et HZ-*sin tft
ou nous posons .
*~
,—.- ~~——- = cota u
*Sin oC' sin (fi * fi')
9 ^
(II.1.10.)
(II.l.ll.)
(II.1.12.)
comme pour le relèvement nous obtenons alors

- 6 -
tg <p^±_ = tg<pj_4^
CQtg (^s*+ Mj (12.1.13.)
Des deux valeurs ? *
• et ^J
nous tirons par addition et soustraction successives les angles </> et ^ et
les autres éléments du quadrilatère serent donnés par application du théo¬
rème àxi sinus. (Voir exemple numérique, page 7;
TX.2. METHODE ANALYTIQUE, PAR APPLICATION DIRECTE DELA LOI DE PROPAGATION
DES ERREURS.
La valeur des angles implicites étant formulée univoquement par les
équations II.1.6. - II.1.9.» nous nous proposons maintenant cle déterminerleur précision par 3.'application directe do la loi de propagation des
erreurs.
Soit oct
oc', js , fi' les grandeurs mesurées
p<x, p«', Pp , Pp' leurs poids et
mcc s mee't mp t mp' leurs erreurs moyennes quadratiques.
Les erretu*s vraies des grandeurs mosurées étant t^ , £<*', tp , £ /s'',l'erreur vraio de notre fonction F sera tp
F t EF = f(cc*£cc, oc'* £«', fi* BB , fi'* Efi' ) ^11.2.1.)
En admettant que ces erreurs vraies soient assez petites pour pouvoiren négliger les puissances d'ordre supérieur a 1, nous pouvons déterminer
Ef en développant cette fonction à l'aide de la formule de Taylor.
tF = /C«*£«, oc'* Ecc', P + Ep, fi'+ £p')- f (**"'> fi* fi') (II.2.2.)
et, en appliquant la formule bic-n connue de la propagation des erreurs,
nous obtenons
Cherchons maintenant l'erreur moyenne quadratique mtp de l'angle implicite
</> . En reprenant la formule (11.1.6.), posons
v~
IL

- 7 -
Problème de Hansen
Calcul d'un exemple numérique
par la méthode Delambre
Données : ocO t II
= 121 4 6 12.43 tX'= 18 23' 06*7 7
fi*O t II
: 64 26 II. 60 fi'- SS° 42' 19". 42
ocO t et
121 46 12.4-3 oc' /8° 23' 06". 77
fi 64° 26' II". 60 fi' SS" 42'/9"4Z
(oc.fi) 186' IZ' Z*"03 (oc'*-fi) 74' OS' 26"./S
(OC + CC') 14-0* 0$' /$".20 (fi-fi') /2 0' OS'3/."02
oC*fi2
93° 06' IZ".0Ice', fi'
237° 02' 43". 10
<p + 4> « ce *fi_
O / //
- 3 0 6 IZ .01(p'+f/j' 0 Cf.'* fi'
= 90 -
2"
2SZ° 57' /6".90
/og sin fi' 9.91 7 OS 95.7 log sin fi 9 .955Z58 S.Z
log sin (oc + ot') 9. 806 6 6 04-. 2 log sin (et*oc') 9 . 3066 è 0 4 'Z
log sin jS'*log sin (ce* a') 9. 723 7/99. 9 log sin /5 * log sin (at+ct') 9.76 / 9/89.4
log sin oc' 9. 49 8 8674.2 log sin oc 9,. 9 29 S 044.4
log sin ( fi* fi') 9. 9 36 9076.6 log sin (fi*fi') $.936 9'o 76.6
log sin ce'*log sin (8*0') 9. 4-35 7 7 SO.8 log sin a +log sin(jB*JS') 9 .8 66 4/ Z /.O
log cotg (jl O.2879449.1 log colg (jl 9 . S9SS068. 4
V-— _
O / t*
Z7 IS 4Z.4Z V'ù t t*
SI 49 38./O
(JL* 45° 72° /S' 42".42 &'* 45" 96° 49' 381/0
*ft°9 C0^9 (& + 4S°) 9
. 50498/4.3 + //og colg(a*4s") 9.078/ S SS.OC")1 hg tg <"/ 8 . 7 3 4 / 3 t / . 9 (n) l log /y "';*" 0./ Z 2 / 7 / 2 .2
I09 (9 "'Z 8 .2 39// 2 6 -2(n) ****:+' 9. 2003567.2 (n)
2
- 0' 59'36"80
z-9° 00' 47'.'30
tp + p2
-3* 06' ,2'.'o/<p'+4>'
252"57'/6"90
9 -4-" OS' 48".8/ <f' 43° 56'
29 "60
<!> -2° 06'35 12/ f 6/° 58' 04".20

soit
(II.2.18.)'MF,?sin**=MF>'
cpco'tg**i*=M?
(pcotgvaleursaparF,remplaçonssimplifier,Pour
(II.2.17.)MFi•
pMJf
'
Mvd*où
(il.2.16.)F,cotgarc=tpdonc
(II.2.15.)(pcotg=F,mais
alors1devientF,fonctionladequadratiquemoyenneL'erreur
%
)VJ-l.^.Xj).T*~
'*fi)Joc(sinfi'sina')(oc*[sin~
ôfi',.,„#TTJj__
oc')(oc*sinfi)*focsinBsinoc'sin_
&E
)\Xi..<»±si»rr*fi)]*(oc*fi'sinsinoc')(oc*[sin
~
effi^
.yç^_
exsinfi')+oc'(sinfi'sinoc')(oc*sin_
$B
UJ-«<»-U-.;T*"
*fi)]'(ocsinfi'sin(oc*ocl)[sin~
tJoc'?
',j^__
0')-oc(sin/S)tfocsinfi'sinfisin_
&M
'U1,<t,il*Tf
~
*
fiJJ*oc(sinfi'sincx'J*oc(fsin«â
.,Bi_
fi))(oc**oCJ(roc*sinfi'sinfisinfi')oc'*(sin-
_
&Z
m.2.9.;0|i/=(ir.2.8.)Tfis0
(IJ.2.7.)oc-)-A'((X+slr)I-#-£,=(11.2,6.)oc')~A'(ex*sin»Tcc~
suivants:résultatslesobtiendronsnouspartiellement,dérivantEn
II.etIparties2endécomposonsnousque
-S-

..Cl-
OÙ les termes sont:
A, =
sin1 C oc * oc')
C, = sin fi sin fi' sin ( ce *fi) sin ( oc - fi')
D, = sin (oc i- <x') sin fi' sin (oc' * fi') sin oi
E, = - sin ex' sin fi sin (oc* fi) sin (ot + oc1)
T* = [sin ( oc f oc') sin fi' s/'n (oc * fi)]'
(II.2.20.)
B, = - sin (oc1* fi') sin fi sinp sin (roc * ex') * (oc * fi)) (II.2.21.)
(II.2.22.)
(II.2.23.)
{11,2.21.)
(IT.2.25.)
De façon analogue, nous obtenons pour les autres angles les erreurs
moyennes quadratiques suivantes:
Pour l'angle <p'
Mp' = t sin 'vVCj? >**)'< +<% +*')' m'cc' *(p'"i *(%Ymfi'
où. les termes sont:
(II.2.26.)
Az =
sin» (oc* of)
Bi = sin fi sin fi' sin ( oc'* fi') sin (ex'- fi)
Dt = -sin (ex* ex') sin ( «'+ fi'J s/'n fi'sin ex
Eg = s/'n ( ex * ex') s/'n (ex* fi) s/'n fi sin oc'
T/ = [sin ( oc*oc') sin fi sin (oc** fi')]'
Pour l'angle d>
(II.2.27.)
(II.2.28.)
Ci = - sin (oc* fi) sin fi' sin fi s/'n ((oc * ex') t (ex'* fi')) (II.2.29. J
(n.2.30.;
(II.2.31.)
(II.2.32.)

- 10 -
où les tenues sont
A>sin' ( fi + B')
B3 = sin ( fi * fi') sin a' sin ( oc'+ fi') s'm fi
C3 = ~sin (B + â') sin (ce* fi) sin oc sin fi'
£3 = sin oc sin oc' sin ( oc* fi) sin (fi-oc')
r/ = [sin ( fit b') sin oc' sin ( oc * fi)]*
Pour l'angle &'
tf * ** *:y(^),KHw<-'(^,A^i'(%,A^
où les termes sont
Au =
sin* (£*£')
B4 = - sin C fi *fi')sin (oc'* fi') sin ce' sin fi
C* = sin (fi * fi') sin oc sin (ex. * fi) sin fi'
Du = sin (oe'-f fi') sin oc sin oc' sin (fi'- a)
7"/ = [sin (fi+B') sin oc sin (ce'> fi')]
(II.2.34.)
(II.2.35.;
(II.2.36.)
D3 = - sin ( oc' + B') sin oc sin oc' sin (CB + fi') + (oc+fi)) (II.2.37.)
(II.2.38.)
(11*2.39.)
(11.2.4.0.;
(II.2.41.)
(II.2.A2.)
(II.2.43.)
VII.2.^0
£« = - sin (oc +fi) sin oc' sin ((fi *b') + ( oc'' + fi')) sinoc (II.2.45.)
(II.2.A6.)
Nous voyonr» que les équations obtenues par cette méthode analytiquedirecte srnt quelque peu compliquées. Toutefois, si l'on procède par ordre
en établissant un tableau des fonctions trigonométriques des angles mesurés
et de leurs combinaisons ( oc + fi ), ( oc + B' ) etc., etc., le calcul numé¬
rique en est ascez aisé.
D'autres avantages et inconvénients de cette méthode seront discutés
plus loin (Chapitre II, A)»

- 11 -
H faut cependant remarquer que les stations A et B sont accessibles,puisque stations du réseau principal» Donc on peut observer les directions
AS, , ASZ et BS,, BSr et il faudra en tenir compte.En effet, le réseau auxiliaire sera, au moment de l'observation, sem¬
blable à celui de la figure 5.
B
FIGURE 5
Les angles observés seront oc, oc'
, jS > /S' $ $ et ^
où 0 = (f * cf (jt.z.w) et \|r = tp * <//' (H. 2.46)
Ce sont donc deux triangles indépendants dans lesquels les erreurs de
fermeture seront compensées. Les poids des angles ex,oc
, /5 et 0'utilisés dans notre problème seront ceux obtenus après la compensation decette phase préliminaire, et par conséquent plus grands que les poids des
moyennes des observations directes.
^On peut se demander si une compensation ae station se justifie a priori,bi nous compensions dans un même système le réseau principal et le réseauauxiliaire elle ne se justifirait pas car elle introduirait des poids nou¬
veaux, différents pour chaque direction. Mais notre intention est de scin¬der notre problème et de le résoudre en deux temps de façon à simplifieret abréger les calculs.
JT..3 . METHODE GEOMETRIQUE
Reprenons les équations II.1.6. - II.1.9. donnant les erreurs moyennesquadratiques des angles implicites. En les élevant au carré, nous auronst
n-^>/'^'V^^^V^^,/^^/V7^/'-^;^.5^V^'^, (II.3.1.)
Mf,'= *iB*r'(££ *A*)'mit *sia* <f(-^ +A,)2 *>'«. * si"4<?(%)* m} * sm*9'(^f^p. (II.3.2. )
M^ = Sin^f^)2^,sin^f^ym^,s;n*ç,f^,As)!mys/n^^*Asymy (11.3.3.)
m*,,* swfjjj'mi '^Vr^]'^,^/"V'f|^/»^ .î^V'^m/^, (II.3.4.)

- 12 -
que nous écrivons plus simplement
M\
<e
M2a>' =
V
M**
~
M*</,<
a, m^ + bi /n£, + C,m£ + d'mZ/s'
a2 m*, * b2 m^, + cz m^ + d2 m^,
5j /"£ + h m^, + c3 m*fi + d3 m^,
(II.3.5.)
(II.3.6.}
(II.3.7.)
(11.3.8.;
Ces équations jouissent d'une propriété remarquable. En effet:
a3 = a<
b, = b3
(II.3.9.)
(II.3.10.)
c*
d, = d2 = d3
(11.3.11.)
(II.3.12.)
ce que nous allons démontrer géométriquement de la façon suivante:
Connaissant les angles oc, ex' , /s et /s' , construisons la solution
géométrique du problème de Hansen à l'aide des points auxiliaires*de
Uollins Q, et Q,(Cf. [5] pages 468-469). la figure initiale A B S, Srétant établie (Figure 6 ; lignes fortes continues J, considérons un petitaccroissement ù. oc de l'angle ex et construisons la figure correspondanteA B S; S/ (lignes en traits-points).
Etudions maintenant l'influence" de l'accroissement sur les angles
implicites cp , y>' , <p et if/' .
A partir de l'intersection G de la ligne S/ A et du cercle de construc¬
tion I' ,menons une parallèle à la droite S, S* . Cette droite coupera
le cercle I' en G', puisque le cercle AG'sous-tena l'angle oc en G et
en B. De façon analogue, une parallèle à S, B2 menée par H passera par Q'puisque QJB sous-tend J3 en A, G et H. Traçons une droite passant par G
et Q,' • Cette droite formera un angle' a oc avec la droite GG', puisquela corde G'QJ scus-tend également l'accroissement a oc que l'on a utilisé
pour la construction de la figure A B S/ s^ . L'angle G Q, h sera
également a oc puisque H Q', est parallèle à GG'. Remarquons que les trois
ançles a #>' » a e et a^' sont égaux pour être sous-tendus par la
même corde S2 S^ du cercle de construction II. A 6 se retrouve en B Q', H
pour être alterne interne de S2 Q* S2 •
A <p étant sous-tendu par la même corde S', H que s' QJ// est
aussi égal à as , A<p' et A^' •
Nous avons ainsi démontré qu'un accroissement ù, oc provoque sur <f ,
</>' et tp des accroissements égaux entre eux en valeur absolue.
Donc, en démontrant que
(II.3.13.)
nous avons du même coup démontré que dans notre système d'équationsII.3»6» - H.3.9., les termes affectés par une erreur sur l'angle oc doivent
être égaux pour les trois équations donnant M*v, , M2f , et AfV6'est-à-dire que
a2 r a3 = a^ (n. 3 . 9.)
A </>' c= A 4> = At//>

FIGURE 6 : Solution géométrique du problème de Hansen
et influence d'un petit accroissement donne'à ot

- Il ~
FIGURE 7: Dénomination des éléments de la solution
géométrique du problème de Hansen

-15-
De façon analogue, nous pouvons démontrer que
b,*b3=b+ (JL.3.10.) C, = CZ=C<. (H. 3.11.) d,:dz = cf3 (H. 3.12.)
Reprenons notre figure 6 et étudions l'influence ae a « sur l'angle cp.
Pour être sous-tendu par la corde S,'B, l'angle a cp se retrouve en
S, B G. De même, pour être sous-tendu par la corde G n, l'angle a ex se
retrouve en G B H. Nous voyons donc que
A cp A ex - ]** (II.3.U.)
Cette propriété importante, ainsi que celles données par les expressions
II.3.9» - II.3»12. seront utilisées par la suite pour la formation des
coefficients des équations donnant la valeur des erreurs moyennes quadrati¬
ques des angles implicites cp , cp' , <f> et ^' .
Ayant démontré précédemment que la variation ù e de la direction
S/ S2 est égale en valeur absolue au?: variations des angles cp' , <p' et <p ,
nous allcns essayer d'exprimer géométriquement ces valeurs.
Reprenons la solution géométrique du problème à l'aide des points de
Collins (Figure 7) et étudions la relation qui existe entre l'accroissement
donné û oc et la variation a e «
L'accroissement a ex étant très petit et les côtés du quadrilatèrerelativement grand, on peut écrire k=k, ,
et b = b, , (voir figure 8).
FIGURE 8
D'autre part, l'accroissement a ex peut être remplacé par l'erreur
moyenne quadratique m^ et a e par me (que l'on exprimera erreur
moyenne quadratique partielle de e par rapport à ex ). En introduisant ces
termes dans la formule de réduction des observations excentriques, nous
obtenons dans le triangle Q,,Q',B

-1C-
e = m.
sin(<x+$) oc
et dans le triangle Q, Q' Q2
be =• m
(il.3-15.)
(II.3.16.)sin y e^
mais nous savons que pour un certain accroissement a oc , nous avons
A 3 A if \ = A «^ = A ip' (II.3.17.)
ou, ce qui revient au même: pour une certaine erreur moyenne quadratique^sur l'angle oc , les erreurs moyennes quadratiques partielles m^,, 3 m^, f
m^i et. m6et sont égales entre elles.* "
"
Donc, pour l'homogénéité de la formule II.3.16., nous pouvons remplacer
m6 par m y,soit:
c =-77^r "V„ (TI.3.18.)
En égalisant les formules (II.3.15.) et (II.3.16.), nous obtenons
*V =LnïcÏ») cc (H.3.19.)
fec' à sin (oc*p) '"«
et en appliquant le théorème du sinus (voir figures 7 et 8)
sin <P
sm ( a * j3)
c
3
Donc, en remplaçant
Yoc b a °f
(II.3.20.)
(II.3.21.)
qui exprime la partie "de l'erreur moyenne quadratique de l'angle <p imputa¬ble à l'erreur moyenne quadratique de l'angle « •
Puisque
m ,f, = ni y'= m ^/'
nous aurons aussi
kcm
kcv' -çâ m^ (II.3.23.) m^
=TE mcba
«
Nous avons démontré plus haut que
A <f = A OC \ -Ai/'
(11.3.22.)
(11.3.24.)
(I1.3.U.)

- 17
où nous remplaçons a 4> par sa valeur et les accroissements par les erreurs
moyennes quadratiques correspondantes, soit
mv - tnex
k cm
b a« (II.3.25.)
ou bien
m *w= O'tÎ) m« (II.3.26.)
De façon analogue, nous trouverons les erreurs xaoyennes quadratiquespartielles des autres angles implicites par rapport à «'
, fi et jB'respectivement.
Récapitulons les termes:
Erreurs moyennes .quadratiques relatives à ex
mkc
*«s ('"£) m« (H.3.27.) ">^= "»^= f"^=JT mcc (II.3.23.)
Erreurs moyennes quadratiques relatives à <x'
k'c'\m%
= 0 "
TÎ) ">«' (H.3.29.) "><>,,= "V„,= *>+•«.=
-ET m«' (H.3.30.)
Erreurs moyennes quadratiques relatives à j3
l 4m
%= ('- Ij) mP (H.3.31.) ">%=mv. »
my= £f vn, (II.3.32.)
Erreurs moyennes quadratiques relatives à 0'
mtye ('- ïï) mf (H«3«330 /»£,» my ">fy=jJ'n/}> (H-3.3A.)
En combinant ces erreurs moyennes quadratiques partielles suivant laloi de propagation des erreurs, nous aurons
»\ - {>-&)'-. -(£7-1. * fHH *C&'""r
-v • (W"i, * />-•&?'-- •(&*', '*(&"*•
-v -(ter-'. *(*k$'-'«'(>-&r*•,*.(%)'-•,
»'*-(nr»-« * f0r^*fa7«; *(-%r-i-
(II.3.35.)
(II.3.36.)
(II.3.37.)
(II.3.38.)

- 18 -
Dans un problème numérique, il suffira, en général, de construire la
figure 7 à l'aide d'un rapporteur d'angles et de mesurer les éléments de
droites avec une règle divisée pour connaître avec précision la deuxièmedécimale des erreurs moyennes quadratiques des angles implicites.
Si une plus granae précision est requise, les éléments de la figurepeuvent se calculer aisément ou bien alors on appliquera les formules
développées au paragrapne 11.2.
Uous pensons utile de donner ici un tableau récapitulatif des éléments
linéaires de la solution géométrique du problème de Hansen en fonction des
angles qui interviennent dans ce même problème. La distance A-B est prisecomme unité.
(II.3.39.) c'= s% S/^.j (II.3.A0.)
Ui:3.U.) d'-- sto'"^,; (II.3.42.)
UI.3.A3.) *'« Infj.'p,) (II.3.44.)
(II.3.45.) /' = £„%%>) (H.3.46.;
(II.3.470 *«*'
5's//y *"';(H.3.48.)
(II.3.49.J A-V "'sin^^ (H.3.5U.)
/T_ „ ,,-, \ t_
3 sinp'sin (ex* ex') . .
(II.3.51.) t'
sincoc'+p'jsinr(H.3.52.)
a t>rnve s,m ( p r p J fr- „ c-,\ /
_
g 5/'/7 OC' St'n (p*/S') /__ - -. »
sin foc* fi) sin <p' UJ-OOJ.Jo-
sin(cC'*fi')sin? UJ-004.;
Les rapports qui interviennent ïe plus souvent dans nos développementspeuvent s'exprimer assez simplement de la façon suivante., en fonction des
angles calculés y> , ep' , *f> et <£>' •
tfl.3.55.)
(II.3.56.)
(II.3.57.)
I a_
sin y sin y_
,_, « \
ba"
sin(y*<t")sin(<p*<t>') \ii.j.?o»)
Ces formules permettent un calcul rapide des problèmes numériques. Les
angles <p , ç>', y et tp' sont calculés par l'une ou l'autre des méthodes
données au paragrapne H.l.»
ca sin ip
sin (oc*p)
da sin y
sin (ex*/s)
ha sin /5
sin (oc*fi)
la sin ex
sin (oc* fi)
i, -
te sin (oc* oc')sin <p'
b =.
l sin (J3 *JS')sin tp'
b =a sin p'sin ('ex* ex')sin (oc*fi) sin y"
ua
since
sin(fi*
fi')
tec_
sin <P sin ip'
ba'"
sin (<p * tp) sin (ep*ep')
k'C sin (p' sin <p
ba sin ( cpi*tf')sin (cp* <p')
l d sin tp' sin ip
ba~
sin (ep * <p) sin (<p*<p')
l'd' sin & sin V

- 19 -
H .4. RELATION ENTRE LA METHODE ANALYTIQUE
ET LA METHODE GEOMETRIQUE .
Il nous reste à prouver que notre méthode géométrique est bien correcte
en démontrant que les termes des équations donnant les M? , Mç>', M? etM^'sont identiques à ceux développés analytiquement.
Démontrons, par exemple, l'identité des coefficients de m* dans les
équations 11.2,33, (après avoir élevé cette dernière au carré) et 11,3,37.donnant toutes deux l'erreur moyenne quadratique de l'angle & •
Nous aurons donc à prouver que
ou en remplaçant dans le premxer membre (-^-j-) par sa valeur
'3
sin « <p sin1 ( B *S'J sin2 «' sin2 fc('->-i3') sin2 fi_
rkç.)2\
sin*(fi+fi') sin* ai' stn*(oc+fi)~
' bal (II.4»2.)
ou, en simplifiant:
sin2 <f> sin («'*£') sin fi _ k_£ .
y i -i \'stn f/3+0'J sm *' sin* (cx*/3)
~
ba (J..U40»/
en appliquant le théorème du sinus aux éléments de la figure 7, nous voyons
que:
sin(tp) = f (H.4.5.; sin(«'+fi')*£*%£ (II.4.6.)
en remplaçant dans (11,4.3.)
c a sin ip sin g_
k c
l V sin (a* fi) stn (jS+fi')~
ba (II.4.7.)
mais
sin * = 4' sin ( fi.fi') (H.4.8.) £^j = j- (II.4.9.)
et notre expression 23.4.7. devient alors
c a Vk sin (0*$')_
k c
a v ba sin (fi* fi')-
ba (II.4.10.)
et, en simplifiant
k c k c
b a==s
b a (II.4.11.)
G.q.f«d.

- 20 -
De façon analogue, on peut démontrer l'identité des autres terrien de
même forme.
Démontrons maintenr-nt que ±e coefficient de mj pour My est bien
égal à
un moins le coefficient de m*
ce
peur Mip'par exemple.
boit à démontrer que
f*s;„iv>(*L + Al) s j7+a, (11.4.12.;
tirés aec équations II.2.26 et 11.2,19 respecu.ver.ont.En remplaçant les lettres i)ar leur valeur:
sin'fce* oc')_
sin' (fi' sin fi stn/S' sin foc'* fi') sin foc'-fi)_
sini>'
sin'foc * oc') sm* f ex* «•) sin* foc'* fi'Jsin'p sinl(oc*ce)
_
- sin' Cfi sin foc'* fi') sin /S sin fi' sin f oc * oc' * oc *fi) sin'y
sim foc * oc) sin' foc * fi) sin*fi srh*foc*ot')
en simplifiant:
sin'cp' sin fi' sinf et'* fi') sin foc'-fi) •
,_
.
sm'foc'* fi') sin fi* sin cf sin f ex * oc )
(IÏ.A.14.)—
's,'n* f sin fi sin foc'* fi') sin foc*cx'*cc+B) .t
~
sin' ( ex* fi) sin fi'
en appliquant le tnéor&me du sinus aux éléments de la figure 7, nous avons:
Sin2ep' d"ITT / 1K \ S'n*V
-
d*/Tr , -M. \
sin'f oc'*/s')~
a' \XX.^*±7*J sin'foc*fi)~
T* U-U4.1Q.J
Ss%% =
-^7 (II.4.17.) et notre identité devient
d' d
—gTsin ( oc' + fi') sin f oc'-fi) * sin' V - sin' f oc * oc')
d' d= —jj-
sin (oc'* fi') sin ( oc* oc'* oc * fi) - sm3 cy
(II.4.18.;
ou bien
d'd
-jj-sin foc'* fi')£sw foc'~fi)- sinfoc*oc'*cY*fi)J
= sin' f oc * oc') - sin' cp - sin' e/'
(II.4.19.)
Pour faciliter la réduction de la parenthèse f 1, posons
sin (oc'-fi)=.sin(oc*ex'-ex-fi) = sin(oc*oc<) cosfoc * fi) -
cosfoc* 0C')sin foc*fi) (II.4.20.)

- 21 -
la parenthèse [ ] devient alors
[.sinfor,'/3)-sfn('oe*cK,*tK*/3)J s-2 COS ( oc + <X')sin{cx+0) (H.4.21.)
et notre expression devient
-2 -0-' sfnfcf'*/9'J cosfex + oCJsin (<x+/3)= sin*(cx + oc') - sin2 (?-sin2y>' (11.4.22.)
et en remplaçant cosfa+ce'jpar sa valeur (théorème du cosinus, figure 7)
,.-b* + k'+k
,TT .
„0. .
,k'z sin2 (oc + oe)
,TT i _,.
cos(a + oe)= TkP~~ (U»4.23.) sm*ç>= -p (II.4.24.)
., .
k2 sin* fcx+ot.') .__ .__
.
Sin* <f'= ji (II.A.25.)
a*kk'sin'(oc + cc>) \+b k kJ~f b* b*UI-A.26.J
5ù
sin(ec + ot')= aSjt<P' (II.4.27.) 5//? (ct+fi)=*
S'£ V(II.4.28.;
5,V f** *'J - Ai^il . Ai^ Ux.4.29. J
en remplaçant dans le premier membre et simplifiant
£f,**-*"-**; a , - *£ - -|J (H.4.30.J
ou bien
'- fa --fi s t-fr-fi (n.4.31.)
qui est bien une identité.
C.q.f.d.

- 22
n-5. COMPARAISON DE DIFFERENTES METHODES
Les deux raéthodes exposées dans les paragrapnes II.2, et 11,3. ne sont
pas les seules qui donnent une solution du problème. D'autres possibilitéssont offertes par l'application des méthodes de compensation médiate ou de
compensation conditionnée avec inconnues.
L'intérêt des méthodes analytique et géométrique décrites plus haut
résident dans le fait qu'elles nous conduisent très rapidement au résultat
cherché dans la phase préliminaire, soit la détermination des angles impli¬cites dans le problème de Hansen. Elles nous permettent d'étudier d'une
façon aisée les effets de la forme du réseau auxiliaire sur les angles im¬
plicites <p , cp> , tp et <p' et les poids à donner aux observations
auxiliaires. En d'autres mots, elles seront utiles pendant les. travaux de
reconnaissance et pour l'établissement d'un programme d'observation.
Par contre, dans la phase finale, lorsque le réseau secondaire aura
été remplacé par la liaison fictive, nous compenserens l'ensemble du réseau
primordial avec liaison fictive par la méthode de compensation médiate.

- 23 -
CHAPITRE HT
De la forme et des poids a donner aux éléments du problème
de la liaison indirecte d'après Hansen pour obtenir un résultat optimum
JI . 1 . GENERALITES
Il est aisé de remarquer dans les formules développées aux paragraphesII.2 et 11,3 que les erreurs moyennes quadratiques des angles implicitessent principalement fonctions de deux causes bien distinctes et indépendan¬tes l'une de l'autre et qui sent:
1 La précision des observations,
2 La position relative des stations S, et S*, qui définit la forme du
réseau auxiliaire (figure 3)lia effet, prenons par exemple l'équation
»',('- W-i, ' (Tr)'"K"(T7l'",*(TT)'"r (H.3.35W
nous voyons que chacun des quatre termes du second membre est formé des deuxéléments cités ci-dessus:
mot i m«'> m% e^ mfi> représentant les inverses des poids des observations et
(i~ -jj)*'• (~fr) » etc étant des coefficients uniquement déterminés
par la forme de la figure auxiliaire.
D'autre part, il faut remarquer queOT£, »»£, , m% et mg> étant les inver¬
ses des poids d'observations indépendantes, sont indépendants, tandis que
les coefficients
(f--çj-) t (ttJ f etc.... sont dépendants les uns des
autres.
Si, pour des raisons que nous examinerons plus loin ( chapitre IV),nous voulons que l'erreur moyenne quadratique d'un angle implicite ait une
certaine valeur donnée d'avance, plusieurs possibilités sont en principeoffertes per:
o.) la variation de l'un ou de plusieurs des poids des angles observés
b) la variation de la forme du réseau auxiliaire.
Cependant, ces variations prises séparément ont des effets limités et
c'est plus généralement par
c) la variation combinée des" poids des angles observés et de la forme
du réseau auxiliaire
que l'on obtiendra le résultat désiré, particulièrement si l'on veut obtenir
simultanément une erreur moyenne quadratique fixée d'avance pour chacun des
quatre angles implicites. Il s'agit ici de ce que nous appellerons le "pro¬blème inverse" qui trouve des applications importantes dans la préparationde chaque programme d'observation, ici en particulier. Le cas général où la
forme et les poids varient n'est pas étudié ici.

- 24 -
UI.2. PRECISION REQUISE SUR LES ANGLES
OBSERVES POUR OBTENIR UNE PRECISION
FIXEE D'AVANCE SUR LES ANGLES IMPLICITES. (Problème inverse)
Reprenons notre système d'équations II.3.35 - II.3.38
"'*'= * (&)'«'**(-£)'>*'*• + (#)'«', - ({?)'*; (n.3.36.:
a/V- * (&}'«'« + (UT»**' * (TT)*'»'e*(>-Tf)t<»> vll.3.38.)
danc lequel noi-.s nous proposons de trouver quelles valeurs il faut donner à
m*c(tm'tx'> m'/3 et m*Bi pour obtenir dos valeurs m*v , m*v> , m1$ et m'?'fixéesd'avance.
En procédant ccnventicnellencnt par eliroiiations successives nous trou¬
verons les valeurr ôom*^ fm'^m'g et m*fii que nous donnons, pour r.énoire,sous leur forme générale;
li-—Y f-—Y ( - l'd']z
M'v + tM'r-M'r')- ZL-tfM'y.-M'*) ^fS~*(M'v-M*^)——-
,'~2Â7 '-*Tâ '-2T?
m ** '
//, A'e'j* 7" TTTï 7~ /' d' y \U11»«î»1«;
// *cl'*// ?kc\ \'~ ba) l '- 77/ ( '"ET/
('-—J2 ("'-—/ ('—'J'y»/V * (M*r'-M'r) ^- * (M'v-Mty —^- * f*v- *W—~-
tt
'-*T7 '-'Si f-*TTm
K's J7~TcTi /, id\2 /, t'd'U |(I1I.2.2.J
('sj) +('-2ti)lzh±
*
, 2u. ~T7W
| >'*Të '-2Tâ '-ZTF/
(,.*£.)' (,-§)* 0-ffî«V * (Af'i» - iW'y»; jî— f (M'<f> -M2V>) pp +(M2</,-M*p') yrgr
'~2Tï i-zT7 i-iTî .
TT
P
,, Us* ,ld)/(,'J7J {'-T7J
,
K'"S7J
0-—V (>-—)* 0-—Y
2 '^tt >^ji '-'nm
&'~ //, kc\z r, k'c'U ficld]* i(III.2.4.)
1-2 E£ t-2±£- f-zU.ba ba ba

- 25 -
IIous étudierons plus spécialement le cas où
Mzv = M*v> Mz<fi * M^' (III.2.5.)
qui nous intéresse particulièrement. Les poids à donner aux observations
seront alors
,I '-'Ta '-zTâ '-* Ta/
P«*^=
JPf(I11-2-6^
/, *'CV./, -k'c'\ [('~t\Y
.
('-Ta)1,
('~ bal'('- tt) U'"z Tî)
— +
—TT*
W\'-2Ta '-2TÏ '~* n,
Cl m'ct' M2tpian.2,7.)
Id \i.
/. .ld\ /('"bal
.
r'57/.
\'~TTJ(>-&)'*('-&
.'-*Tï '-zTë '-zTl/,Pa'lh- *
: i (III.2.8.)p
fi M >
r'j'
('-&)'• t<" G)/v, [(-¥.)' .('-£)' (-&)'
kc k'c' td // I '->TÏ '-2TÏ '-2 Ta/
,
p?'*—fi>=
^v(m#SWM
HT.3. DE DIVERSES FORMES TYPES DU RESEAU AUXILIAIRE
Nous avons vu plus haut que les coefficients des équations donnant les
erreurs noyennes quadratiques des angles implicites sont l'expression de la
forme du réseau auxiliaire et dépendent donc entièrement du choix aes sta¬
tions S;et S2.D'une façon générale, nous cherchons h. ootenir une précision maximale
des angles implicites. Pour y arriver, nous avons les trois possibilitéssuivantes :
a) en augmentant la précision des angles observés.
Il est évident que, si les poids des observations tendent vers l'in¬
fini, les poids des angles implicites tenaront également vers l'in¬fini. Cette solution n'est praticable que jusqu'à un certain degrécar, a partir d'un certain nombre d'observations, leur répétitionn'augmente pas sensiblement le poids de leur moyenne.

- 26 -
b) en choisissant convenablement la position relative des stations do
façon que, par la forme même du réseau auxiliaire, la précision des
angles implicites soit plus grande que celle des angles observés.Cette solution est économique, car elle réduit le nombre des obser¬
vations. Cependant, dans les cas pratiques, elle est limitée par la
confiLToration du terrain et les obstacles qui peuvent se présentersur les lignes de visées idéales,
c) en combinant judicieusement les deux points précédents, c'est-a-direen fixant les stations S, et Si dans la meilleure position possibleofferte par le terrain et en augmentant le poids des observations
dans une limite économique.
Pour étudier l'effet de la forme du réseau auxiliaire sur la précisiondes angles implicites, nous adraettrons le cas le plus sinple et en même tempsle plus probable, c'est-à-dire que nous fixerons un poids égal pour toutes
les observations
P« = P,oc' Pfi= PjS' et m* = 1 (III.3.1.)
Notre système d'équations II.3.35. - II.3.3^. deviendra alors
M^ - f'-a///r'e'li /ld\» /t'd'l'
'
\—3J *
(77/*
[57/
M tat• ity-
/ k'e'\' (Id \2 (Vd'Y
M2^ (W- m* (>'&)' - (%)'
M*<fi> - (W* m > m*(<-'$'
(III.3.2.)
(in.3.3.)
(III.3.4.)
(Iil.3.5.)
Ce système est uniquement fonction de la forme du réseau auxiliaire.Comme chacune des stations auxiliaires peut occuper théoriquement n'im¬
porte quel point, le réseau auxiliaire peut donc prendre une infinité de
formes différentes.
Une représentation graphique générale des valeurs des erreurs moyennes
quadratiques des angles implicites pour toutes les positions relatives des
stations auxiliaires 3, et S* par rapport aux stations fixes A et B étant
impossible, nous nous bornerons à étudier divers exemples qui nous ont parusintéressants.
Tout d'abord, pour mettre un peu d'ordre et faciliter la référence,nous avons classé les différents cas qui peuvent se présenter en quatre caté¬
gories de formes types. Cette classification est basée sur la position rela¬
tive des stations auxiliaires S,et Si par rapport aux pointsfixes A et B.Mous distinguons:

27 -
Formes de type I.
formes de type II.
Les deux stations auxiliaires S; et Si
sont situées de part et d'autre de la
ligne A-B et la droite S, S* passe entre
A et B (Figure 9).
Les deux stations auxiliaires S/ et S*
sont situées de part et d'autre de la
ligne A-B et la droite S/ S* passe der¬
rière A (Figure 10) ou derrière B.
FIGURE IO
Formes de type III»
Les deux stations auxiliaires S/ et Si
sont situées d'un même côté de la ligneA-B et le prolongement de la droite S/ Si
passe entre A et B (Figure 11).
FIGURE 11
Formes de type IV.
Les deux stations auxiliaires S/ et bj
sont situées d'un même côté de la ligneA-3 et le prolongement de la droite S/ Si
passe derrière A (Figure 12) ou derrière
B.
FIGURE 12
Les paragraphes suivants sont consacrés à 1'-étude de ces formes.

- 28 -
ÏÏI.4 FORMES DE TYPE I
Les deux stations auxiliaires S/et S* sont situées de part et
d -autre de la ligne A-B et la ûroite S/ S* passe entre A et B.
Cas général.Si dans la figure 13 qui représente le cas général de la forme de type I
nous mesurons les éléments à l'aide d'une règle divisée en prenant la distan¬
ce A-B conme unité nous aurons
a =1.00
b = 0.40
c=1.30
d =1.60
k = C.6o
t = C44
c'=1.17
d'-1.10
k'=0.70
l'=0.38
(III.4.1.)
En calculami à la règle et en arrondissant a 0.05, nous obtiendrons les
ternes des formules III.3.2. - III.3.5. que nous récapitulons dans le tableau
suivant:

- 29 -
kcba
*.£'ba
Lé.ba
ba
= I. 95
= 2.OS
= /• 75
1.05
(kc\*Tâl s
m- -
J.eo ('-ifc)' s °'9°
J-°S (>-W= °'5S
1.10 (> ïd')*_ O-OO
> (III.4.2.J
J
Introduisant ces termes dans lea formules III.3.2. - I1I.3.5»» nous
obtiendrons
M*v = O.PO + 4.20 + 3.OS + I.IO * 9.25
M'y'= 5.80 f I.IO + 3. OS + I.IO = 9-OS
M*4> = 3-80 + 4.20 + O.SS + I.IO = Ç.65
M*<p'z: 3.80 + 4.20 + 3.05 + O.OO =• II.OS
> (111.^.3.)
J
Ces valeurs sont relativement grandes. Elles indiquent que, dans cet
exemple, les poids des angles calculés sont environ le dixième des poids des
angles observés. Ce cas n'est donc pas favorable. Quelques essais nous mon¬
trent rapidement que lorsqu-au moins une des stations auxiliaires se rappro¬che de la ligne A-B, les valeurs des erreurs moyennes quadratiques sur les
angles implicites ^'améliorent nettement.
Pour fixer les idées, nous avons
établi un tableau récapitulatif ^page30) desMVi^VVV etAfV'pour les com¬
binaisons possibles des positions de
S/ et S; quand tp et tp prennent les
valeurs 20e, 40', 60°et 90°et que fet <j>' prennent les valeurs 5°, 10* et20° (voir' figure 14-).
Cevtableau-est conçu pour les cas
ou une dos stations auxiliaires est
voisine de la liaison fictive et quel'autre en est relativement éloignée.
Bien que ce cas ne soit pas très
favorable, il peut se présenter, par¬ticulièrement lorsqu'une station du
réseau général est utilisée égalementcomme 1-un des sommets ae la figureauxiliaire.
o
u
u
o
co
*> w>
O «r «,
5 o J:
FIGURE 14
3 5/ \
•S o ^ \Voîr tab,c<>u P°9« 30 )

30 -
Tableau des carrés des erreurs moyennes quadratiques
des angles implicites pour certaines valeurs de ceux— ci
V <l> V 4>' M*v M2# M y>i M^t 9> * V" 4» M'p M2? M'p' A/V
20' 20' s' s' 1. 1316 1 . 1346 0. 5417 0.54/7 60' 20' 5' s' /. 3622 1.0663 0.4698 0.6166
te' /./7*6 /0243 0.301/ 0.9 43* /o' 1 . *9I7 0.9*77 e .2762 1.107»
20' 1. 313 7 a. 96re 0.2233 / .3/37 20' /
. 7633 0.89*3 e .2835 /. 6/06
10' S''
1 .02*3 /1746 0.933* 0.308/ te' 5' / . 2998 /.065* 0.8075 0. 3*22
/a' 0. 93 79 a.9399 0. 6/49 0.614? te' /.3086 0.826/ 0.50// 0. 7*2*
20' 0. 9978 a.8012 0. 4316 0. 9978 20' /.5263' 0.-7/88 0.3938 /.285/
2e' S' 0.7 670 / 3/37 / . 3117 0 . 2233 20' s' / . 268/ /.1*66 1.1466 0./99*
4e' s'
ta'
2a'
S'
0 . 3012 0 9978 0. 9978 O. 4316
40' 5'
10'
20'
5'
I . /7S8
/.29/4
/. 328*
0 . 8092
0.596»
/. 23 7/
0.3092
0.3968
0.47*7
0. *»*2
0.9663
0.54/3
\a . 75** O . 754* 0.754* B . 75*4 |
'/ . 0928 1 • 1017 e. 5866 0. 4864
le' i . ieoo / .227/ 0.32Ç2 0. 8*09 10' 1 . 409/ /./3S9 0.2523 0. 9696
2a' 1 . 19*6 /./eae 0.1909 / . 1946 20' /. 62B5 1. es/* 0. 1994 /• 4398
ie' s' 0 . 9783 / -3965 /.0332 0. 274/ /O' 5* /.253* /.2 7 7g 0 .8739 0.274»
ta' 0. 86le / . 7975 0.682O O. 32*5 /O' 1. 2/35 I. 056/ 0.5189 0.6027
2e' a.8612 / . 0643 0.4409 0.8612 20' /. 3578 0 . 9043 0.3382 /.0B3S
20' s' 0 . 92/7 0 .8089 /.*92/ e. 2403 20' S' /.1817 /. *20S 1.27*5 0.lis?
le' 0 .7377 0.706 6 /. 158 O 0.3796 10' /.0605 /.//S2 0.903 0 o.lfS?
20' 0 .6272 0.7290 0.8508 0.6272 20' 1'0935 0 . 8523 0.6/// 0. 7570
60' S' S' 1 . 0663 /.3622 0.6166 0.4698 6e' S' S' /.2362 / . 2862 e. 5/93 0.5/93
10' 1 . 063* / 2998 0.3*22 0. 8075 /e' /358* /. /812 0.2685 0.930/
20' 1 . 14-66 1 2681 0./99* 1.1466 20' 1 . 5685 /• 0661 0. 2/41 7.39»/
10' S' 0 94-77 1 -49/7 /. 0978 0.2762 10' S' / .1812 / . 3584 0. 9301 1.2685
10' 0. 8261 0.S653 a. 7*2* 0.50// /o' /. /366 /. /366 0. 570* 0. 570*
20' C . 8092 0 . 6613 B. 4842 0. 8092 20' 1.2 759 0. 9509 0 .3866 1 . 0344
2a' S' a .89*3 /.7633 1. 6106 0.2835 20' S' / . 0662 /. 5685 1.3981 0.21*/
10' a . 7188 0. 7830 1.2851 0.3938 ta' e. 9SO) /. 2 759 1.0366 0.31*6
10' s'
2e'
s'
0 . S968
1 . 029/
0 . 7738
/ . 4-043
B. 9 663
0.655 7
0.5968
O. 460360' 6o' 30'
20'
30'
0. 9B4S 0. f»45 e.7433 0. 7*33
\/.OOOO / .OOOO 1 . BOBO i. oooe\
la' / . 0251 1 • 3357 0.378/ 0. 780/ 90' S' 5' 0. 5432 /.2408 a.3846 O.S36I
2e' 11039 7.2779 0.2330 /. /039/o'
20'
0 . 6563
/ . 0806
/ . 0 4 7*
0.8/98-
0 .376 0
0.53*0
0.97*4
1. 6417
la' s' o. rosi / • 5805 1. 1835 0.2 973
10'
2e'
0.'7879
0. 7703
/ 3988
/ . 2448
0.8325
0.573 8
a.496e
0.7705
10' S'
10'
20'
0 . 7094
0 . 7146
1 . B680
/. 4058
/ . 1038
0. 80 72
/ . 0887
0 . 7 788
0. 8072
0.3625
0. 6833
/.3289
20' s' 0 . 86/2 /. 7299 / .7742 0.3689 20' 5' 1 . 1983 1. 8952 /•8356 0.3735
10" 0 . 7089 / . 7/30 / .*7/a 0.*S22 10' / . ISIS t. 5406 / . 5406 0.7613
20' 0 . 4339 / -303* /.002/ /.3*30 20' 1.24$» 0.9180 1. 3/30 2.6235
40' 20' S' S' / .3022 /•0928 0.486* 0-5866 30' 20' S' S' /. 4043 7.029/ O. 4603 0. 6557
te' / .397/ 0. 9783 0.27*0 / .043/ 10' / . 5805 0.9BSI 0. 2 973 /. /93S
20' /. 6/4-8 0.92/7 0.2402 / . *f2/ 20' /. 72 99 0. 86/2 0 . 3687 /.7741
10' S' 1 . 2270 / . 1000 0.8*09 0.3202 te' S' 1. 3357 1.0251 0. 7801 0.378/
10' / . 1974 0. 86/0 0.52*5 0.6820 10' /.3988 0.78 79 O. 4960 0.8325
20' / . 3483 O. 7377 0.379 6 /.1580 20' /. 7130 0.7089 0. *522 /.47/8
20' 5' /.1882 / . 1940 / .19*0 0 ,/903 20' S' 1 . 2 779 1. 1039 /.1039 0.2330
10' /. 064-2 0. 8606 0. 8606 0. 4*01 10' / . 2447 0. 7 703 0. 7 705 0.5738
20' / . /0*5 0.6266 0.62 6 6 O . 8502 20' / . 4740 O. 6063 0.6 063 I. 1727
ta' 5' S' 1.2684 /.2684 a. 5/6 8 0.5/68 40' s' 5' 1. 3*65 t.17/S 0 . 4857 0.5807
10' /. 3193 /. 7843 B.260* 0. 9/50 ta' 1. 4795 /•es* 6 0. 279* 1.0612
20' 1 . 4766 / 1220 0.1662 / .3}/* 20' 1.8079 a.9237 0.33BO 1.6*86
10' S' 1 . 1843 / 3/93 O.9I50 0.2604 10' 3' / .2408 Z.2/49 0.8528 0.3169
10' /. ne) / /I09 0.55*7 0.5547 te' /.2608 a. 9649 O.S256 0.7O47
20' 1. 1884 0 . 9687 0.3363 0.9687 20' 1 .5407 0.305S 0.347* /32I0
20' S' / 122 0 / . 4766 / .33/* 0.1662 20' 5' /. 0977 / .3868 /.2696 0.2372
10' 0. 9687 /./884 0. 9687 0.3363 /a' / . 0361 1 0 551 0. 9077 0.4989
20' 0 . 9293 0.9293 0.6550 O.6550 20' /. 224» 0 . 8046 0. 7032 /. 0*58
60' S' S' / . 23 7/ / .3284 0.5*13 0 .4947 60' S' 3' r.2408 /.1592 O.S36I 0.58*6
10' / . 2776 / .2534 0.27*8 0 . 8739 10' /. 4066 0. 9703 0.362S /. 08B7
20' 1 . 418 7 /1901 0.16*/ /. 2727 20' 7.8952 0.809/ 0.5735 /.8356
ta' S' 1 1339 /*09> 0.9694 0-2523 10' 5' 7.0474 /. 2 736 0.974* 0.3760
10' /. 0361 / .2135 0 .6027 O. S/8 9 10' / . 1033 0. 9 755 0.6835 0.7788
20' 1 . /134 1. 0667 0.364/ 0.90/2 20' /.5*06 0. 7623 0. 7623 /.5*06
20' S' 1 . OS/4 /.6205 /.4398 0. 1994 20' S' 0 .8/98 I. 6939 / .64/7 0.53*0
10' 0. 9045 1.3578 1 .0835 0.3382 10' 0 .8072 /.3287 / .3289 0.8072
20' 0 . 8S05 / 0997 /. 7552 0. 6093 20' /. 1586 /. 0303 0.76 53 1.4836
30' S'
10'
20'
S'
10'
10'
S'
te'
20'
S'
10'
10'
1. 1715
1. 21*9
1 . 3868
. 1. 03 46
0. 964-7
1.0351
a. 9235
0.8055
0. 63 40
1. 3463
1 .2 408
1.0977
1. *7fS
1.260»
I.B36I
1 . 8077
/• 5407
1OS42
0.5807
0.3/6 9
0.7372
1.0612
1.70*7
0.4789
/. 6*B*
/.32/0
/. 8752
0.4B57
0.8528
1.2(76
0.27)4
0.5256
0.9077
0.3298
0.4*74
/. *397

-31-
Nouc n'avons pas étendu ce tableau à un plus grand nonbre de positionscar le nombre de leurs combinaisons deviendrait rapidement prohibitif.
L'examen aes valeurs obtenues nous conduit aux remarques suivantes;
1. M'y = A/Vet A/V= A/V
pour toutes les positions de S, et S* sur la médiatrice du segment AB.
2. M*<fi = M'y' = M'<f> = A/V - 0. 75**
pour la seule position du tableau où S, est symétrique a Sipar rapportà l'axe AB. <p = cf' = <f> = <f>' = 20°
3. M*v = Micf'= M*>p - M*<//' = 1.0000
pour la seule position du tableau où
v+ r= 90" et ?**'*so-(9=(f/ __ 6o. ft v,._r._3on
Nous étudierons plus loin ces positions remarquables.
Cas particulier no i.jl.
symétrie des stationë' S; et S; par rapport à l'axe AB.
Nous avons dit plus haut qu'une représentation graphique généraleimpossible mis l'examen des formules III.3*2. - III.3.5. et de la figure 13
nous montre que pour des positions symétriques de S, et 3^ par rapport à
l'axe aB nous aurons M!v= M'r'et M*<p = M*4>' puisque c = c', d = d',
k = k', 1=1' .
Ce cas se laisse représenter d'une façon assez simple.a l'aide d'un graphique que le manque de place nous empêche de reprodui¬
re entièrement nais dont le principe est donné par figure 15., nous tirons les
valeurs de c = c', d = d', h = 3c', l = l' et b pour 35 points repartis dans un qua¬drant du cercle de diamètre AB (figure 15).
Ces éléments sont introduits dans les formules III.3.2. - III.3.5. et le
tableau de la page 33 nous donne le calcul de ces formules et les résultatsdes M2<p= M'p'ex M*tf>= M'<f>' pour ces 35 points.
Par symétrie et par permutation des c et des d ainsi que des k et des l
nous pouvons établir le diagramme de la figure 16.Dans la partie du diagramme supérieure a AB, les lignes de m8ne valeur
pour M*y ~ M'p'ont été interpolées. La partie inférieure est symétrique à la
supérieure par rapport au centre. Nous y représentons les valeurs de A/ty»A/V.Peur utiliser le diagramme, il suffit de reporter la position relative
de S/ et S2 par rapport ù. AB ^Figure 16). En interpolant, nous lirons en S,
les valeurs M*?= M'p'et en S, les valeurs A/V = Ml<p>Ce diagramme n'est valable que pour des positions symétriques de S/ et.
Si par rapport à la ligne AB.

FIGURE 15
e en S,
Lire en St
A/V =• M2<p>
0.83
FIGURE 16

- 'l'i -
«/>
te
b
«1
Ço
tl-i.
«0
V»
te
b «-
Cte
Çte
s * -s-
CO
«a H F
5ïO
^
'b *2
t |
b\*•- -8b ^û>Q. *.
ste«ite <-
a c
*
h
te
*»
te
O
«i
te
&
te
bc>
o«^
Ci
ste
V»
te
«J
«.à.
^ «n xi Oj N Ol o "o * N oi wi «o oo K N wi ><1 N Cl •o N * « <o v Vl »l XI Cl b b b b
k N «0 •> ^ ^ K oj oi^ N N o» Ol ** M K Ot Ol v N K 04 01 Cl »n 01 oj Ol ». Cl Cl b b b b
**• « Cl Cl X •s Cl Cl Cl V •s Cl Cl Cl ,*s V Cl Cl Ci ^ V Cl Cl Cl n V Cl Cl Cl Cl V V v x >. x
5
nS.
tl
Vi N Cl * •^ >o "O N. Cl In ** ifl N 01 n «M K Cl 4 0» "l v> * N. "y •* Cl b Cl b b
N <o •o <<1 >0 N « <o ><1 in K >o >0 5 »1 •o Kl Vl «1 N XI il V) 04 <e K N Xl Cl b b b b
N& b Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl o Cl Cl Cl Ci Cl Ci Cl Cl Cl Cl Cl Cl Cl Cl Q et Cl Cl s. ••» v *» x
SN
5Dl<n N Cl •* >. K m Cl * v Ol »> N >d * *\ »> <o oj •M ^» Cl «< "> Vl K N v> •y 04 b b b b b
»VJ •X N »i "1 •* <M «M "»l "»1 •* M N •n «l * "1 *1 01 "1 •* • >* * -» * XI X» XI <o <n b b b b b
3$ O b o Cl Cl Cl Cl Cl Cl Cl Cl Cl Ci Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Ci Cl Cl Cl Cl Cl Ci
M
K> ^ y» V <0 >o •s » *v IO Ol •* oi • oi > <o X «0 •* * + XI ** .*• *» X Xl 01 XI b b b b b
"HS N * «o «y n <<l N •n N «o °j -* 04 N Ol •0 >\ 11 •* 04 N 01 XI K Cl b b b» * •M >» Cl >o 4 «1 V Cl K N Ci K >n "> ** Cl Cl N Vl O) ^ XI V| N Cl Vl Vl Vl V| Vl Vl
•»|-o « Cl O Cl Cl Cl o 0 ci 0 Cl Cl Cl Ci Ci Ci Cl Cl 0 Cl ^ Cl Cl Cl Ci *» X •fc * Cl N •y •y •y •y
""^O Cl Cl O Cl Cl Ci Cl Cl Cl O Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Ci Cl Cl Cl Ci Cl b b b b b
"015 O oi oj «1 «i »0 «1 «1 «J * <o yi *1 •o >* N N N * XI •* N 04 •* «1 b b b b b
><> "0 xi N >« •» -i <0 K •j •* «0 « N «0 * >n K m »l » Vl XI N X y M ») •» b b b b
N « Cl Cl CI Cl Ci Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Q Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl b b b b b
*» * -i f- + * % % V * t. 1. t i. * * 1. * * * + * * + V 1. * * * * * *l ti •H *i ti
t>LS O N •M •M N + •* •* * •*. -O oj «0 yi * Xi <0 •* y •j N XI •y b b b b b
"o •* »l «< *s >0 * "l H «; «1 * "i M •>. «) •* »! N <o Vl "1 N 04 K Vl u Vl b
«M b o Cl Cl Cl O Q Cl Cl o Cl Cl Cl Ci CI Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl 0 Cl Ci Ci <J "% ^ x *» *s
blb ><1 V Hl *o v. •o K N N 01 * * «1 N «0 •* ^ Oi Xl XI b b b b b
•M N ** î- Cl N «J Cl N •M Cl N •M *. u *\ N N •i «l "1 "l •y Vl Vl Vl Vl Vl
o Cl Cl Cl Cl Ci Cl Cl Ci Cl Cl Cl Cl Ci Cl Cl Ci Ci Cl Cl Cl Ci Ci Cl Cl Cl Cl Cl Cl Cl Cl b b b b
"bb » Vi >o + ^ N •>l "l •>l ** N "1 * •» •* •> Cl Vl Cl Cl "1 »l Ol oj N V) Cl Ol XI Ol bo N vo >» >o N Ol •o •>> «» <o M >n •^ N XI Vl "1 «* Vl si- •» ">l «y «1 * * Ol 01
>»«iN *» •* Cl Cl V *» b Cl b ** Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl CI Cl Cl Cl Cl ci Cl Cj Cl b b b b b
« > V X *^ ^ ^ *. «1 N N N N * •*• •* »l N «0 «l K XI •» Xl X» « Ol »i Vl •» N
"b Vl *i N »* >0 •l >« •* "1 M "o »i •<< *» Vl •* «l M *» XI «o J- "1 N K xi v> •* »l
b Cl O Cl Cl Cl Cl Cl Cl Cl CI Cl CI Cl Cl o Cl Cl CI Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl b b b b b
O M «o «1 Ol Cl Cl •* yi *J Cl V Cl •* <a oj Cl XI**»»
•* N Cl X XI M XI Cl ^ K *Ss» b Cl Cl Cl Cl Ol •l Ol Cl Cl Oi oi 01 Cl O * * * * Vl Cl ^ s* •y 04 X) Ol 01 Cl K N oj Oj
•* •* •» * •* N 1 N •>> •i ^» ** ^ N N •^ N. *k ^ *s ** *» ** *» **. Cl Cl Cl Cl X Cl b b b b
«yVl Cl "0 Cl >0 <o •n «d Cl >o Ol ** •o Cl >o 01 Ol V «n 4 Vl ** * XI ** 01 XI V| Ol b b b b b
îïTè •M Cl *y Cl •M . •M Cl N N 0| Cl N «0 «1 VI <0 N <N N <x X) V 04 •» •»! N Ci Cl b b Cl b«O Ol N "C Cl "O «1 N <o Cl N
ClN <0 O K Cl *l yi Cl Cl •N V| N •^ XI 04 Oi M m Vl v» V| Vl
•*:|o Cl Cl *» ** N c> U ** ^. Cl »^ »* N Cl ^ *w ^ X *» V * •y *. ** X N •y •y «y •y «y N
V—"b Cl Cl Cl Cl Cl Ci Cl Cl Cl Cl Cl Cl Cl Cl Ci 0 Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl b Cl b 0 b b b
olb
•*e|< O Cl Cl Cl Cl •n 0) Cl Ci Cl >0 •n oj Cl Cl * <*• •t Ol Cl XI Cl «y yi «0 «0 • N Ci Xl b b b b b
1
Vi •» "1 N**
- «i "> «< ^ •* «i •M N * •1 N ^ *» "I »l m ^ Cl *» *» «I ** Cl b Cl b b b
o c> Cl Cl Cl Cl Cl Cl Cl Cl Ci Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl C) Cl Cl Cl Cl tl b b b b b
»^* * X. 1. t 1 t t » t * * 1. 1. + * «. 4. % * * * i. * t. t * % * * * t.
•»e|o o Cl J» Cl Cl Cl * N N Cl Cl VI XI •» V Cl * Cl •n * «1 •y XI Cl •* b b b b bs XI K Oi Vl •o K *J Oi "o «l <o •o s 04 Oi x> K •1 Oi 04 oj «0 Oi Oi b b b
«Vl o Cl Cl Cl Cl Ci Ci Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl « Cl Cl Ci Ci
<j| b Vi Cl Vl Cl >0 •o *» •o Cl «p K ** •o Cl vi Oo •>l ^. *l >< Vi Oi •o V » V| b b b
•ael-Q"1 •) •» «* •>! •l •4- •*4 "1 •» •» •n •^ »1 -* •^ «î *n * •» » •* • •* + v{ •n Vl Vl Vl
b Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Ci Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl b b b b b
o «1 Ol «1 o. • N Ol > fs "lK «M -» >n l-l •» o< Cl Cl N «I 04 *» b Oi XI 01 b
A:"I K ** «1 Ol K »! <o ^ •l K 00 0! Cl XI XI K K K »i Vl v> 4 Vl * "1 *i
>y X N "l "» ** -- *t N *J *» *. ** ^ *» Cl Cl Cl *• ^ Ci Cl Cl Cl Cl Cl Cl Cl Cl Cl b b b b b
b Cl Cl Cl ** Cl Cl Cl •M Cl "»l ** Cl K Vl N •» Vl M s >» Vl
u Vi y» K Oj V» •O K «0 Ol H •O J^ «J Ol *1 «O K 01 Ol Vl XI K XI Ol XI K K Oi K N oj oj Ol
b Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl Cl b b b b
o «1 K •n •o «1 Cl « + ** o< * Cl Cl N y» 0 Xt N «0 ** s Vl*
0 •*.
î!»e o Ol Oi Ol >1 Ol Ol oi oi «1 Ol oj <o <0 •* •n *l N N Cl Cl 01 * K X) »; XI V| » XI v! *
* "1 "1 •>> •n N •« «1 N «M ** *~ ^ ** ** ** ^* ** *» ^ ** ^ Cl Cl Cl Cl Cl CI Cl Cl b b b b b
b v» * «X •o »l « «1 «l "d * *^ •o *1 * K Cl Cl s XI *» N 04 XJ 4- XI N 04 Ol K ^ •1 01Ol «I «l «> « «0 «> K K K y> I>1 <o >o ><l •0 * XI oj «» K >o y >y Cl oj 01 01 Ol n
K K K N >o V» »! •»l •>l •l ">l •n N M «1 N N ** *• *• V ** ** ** *% ** Cl b 0 b b b
"•1 » N Cl <o <o •» ^ <« •>l V, yi * N *» Cl Cl Oj <o •» •y «0 y» •» «1 N 04 Ol Ol
«<j 0» Ol Oi Ol <* m « °J N K R K K ><i «O •Q •o W| «* x> «9 Xi Vl •y N «. Cl V» Ol Ol o. K Vl
N K K K K n fcl »» «1 o •> •n »l <n "i N ". "« N N X ** ^» ** >» N. V >. X Cl b b b b b
•S SiS*
- «I "1 «O XI K «4 OlCl
fe î!"> •* *i ta
•s
0» V
NN ni *
ly iyVl
•y N«0•X
01•y
Cl•>l »l
N"1 o»
>*"i
«0«1

implicites»anglesdesmaximaprécisionlasensiblementdiminuercelapoursans
ABlignelade&.deaistanceunejusqu'àABdemédiatriceladed7âûtreet
partdeSfsymétriquementetS,stationsnosd'établirpermettranousCeci
unité".
&'unequeaffectéeseranedécimaledeuxièmesa-f=S;S2distanceunepour
queetSz^aS,distanceunejusqu-'à1quepetiteplusestvMquadratiquemoyennel'erreurqueremarquer.deintéressantparticulièrementestH
variations»cesdevaleurlasurrenseignenous3$pageludetableauLe
•90°devoisinesexdevaleurs
despourpeutrèschangeraM*e/>devaleurlaquevoyonsnousCependant,
direction.une
enconfondentsecôtésdeuxsesettempsmêmeennuldevientepl'anglemais
iIII.4.16)±=M*v
alorsseravaleurSaAB.droitelademilieuauconfondentsestations
deuxlesquandcxsso'c'est-a-direpourminimaseramoyenneerreurCette
(III.4.15)M'<fi'=M'fM*,='*3\"COtg
=M*
16
a-)cotg4
ex*cotg*
*z
(/3
*S*
occotg*6oc-cotg*
,,
,oc-jex*cocg--cotg'*z
/(<s*s*
occotg'aoc-cotg-*_zM
alorsseraimplicitesanglesdesquadratique
moyennel'erreurdecarréleIII.3.5.,-III.3.2.formuleslesD'après
(III^13)^-^ïiL^^otg^c('-ar-
UII.4.12)3-C°^"('-ïï)*
(111.4.11)Te7?~
TTsTr^oT"
57/f
.occotg*oc*cotg*2*i_ex.)*cotg*('*//kl'.
(111.4.10)^go5yf//?,
l>d'==tel=ÀrV=kc
(III.4.9.)exs2^=ba(111.4.8.)ocsinkz=b
Mcos2ocsm2(III.4.7.)a=*=*'=/=/'(III.4.6.)~S—c»c'=^=o"=
seront:élémentsautreslesdeoc,fonctionEn
(I1I.4.5.)<p'=<p=<f'=<fetB'=<x'=/3=«Soit
17).(FigureAB.l'axe&rapportparsymétriques
etABdemilieuauperpendiculairela,sursontSietS,stationsLes
1.2.Ho.particulierCas
-34-

finalementet
(IH.4.20
(III.4.24)
(III.4.23)
(III.4.22)
(III.4.21)
(IH.4.20)
(III.4.19)
(III.4.18)
aii.4.17)
K=d'*V*l'd2+c'k'-k'c=Vd'ba2
K=V'd"+l'd1+k"c''+k'c1
K=V'd''*l'd2*k"c'2*k'c1
K=V'd'2*l'd2*k"c"+k'c*=
=Idba2
k'c'ba2
=kcba2
développant!etdénominateursleschassantEn
b'a1—I7J1—*
b'a'*
b'a'(ba-l'd1)1/Vik'c".
.
b'a1b'a'b'a h*a*a*t>*b'a1
l'd'(ba-td)1k"c"
b'a'*
b'a1*"
b'a'
V'd'l'd1fba-k'c')* !>*>*
T7!7*
b'a'
l'd"_^_
b'a'
b'a'
k'c*
b'a'
k'c1
b'a'
k'c'
S'a'
-t
=1
l'djt»'V
fi'-
"AT"*
b'a'~
'
k'\^
,'ba-kc)*,
alorsauronsNous
/*M'4>'=M'<P=M*9'*A/V
donnantformesdesHechcrcne
1.3Ko.particulierCas
17FIGURE
2.)NSI.(cass*
jS=cf'=oCdefonctionen
M2ydevaleursdesTableau
00OO©OOO0'
a5.6713259.37431034.49725.6713fO'
a2.747514.996056.98432.747520'
a732/r.OOOO3.9OOOO1.732/30'
a/.0000t.OOOOt.OOOO45'
aC839I7400.8O4S58O.S3S/SO°
a0.57747777O-r11r.o0.57746o°
ao.sooo76560.0.06250.500063'26'
a0.364075440.60170•36*00.70'
30.267975/3.00.0052.2679075'
S0.176375020O.00100.t76380'
a0.087475000•OOO10-.057*085'
s2-
S,7SOO0.O•OOOOO.OOOO90'
SzSi
distanceM*<pCOtg*c<odcote*
-35-
- 36 -
6a =
k'e* * k'*c* 1- tLd* < l"d
TTc
nais, puisque
ke = k'c' * Ld * l'd'
ba =
z ba
±4^ = 2 kc = 2 k'c'* 2 ld= 2 l'd'2 K C
que l''<~>n peut écrire aussi
ba s k c * l d = X-'c' >> l'd'
(IIl.A.26.)
(III.4.27.)
(III.4.28.)
UII.A.29.)
Par construction c, d, k, l sont les côtés d'un quadrilatère inscrip-tiblc et a une de ses diagonales \fi£ure 13 j.
Puisque dans tout quadrilatère inscriptiuie la sonne des produits des
cct4s opposés est égale au produit ace diagonales (théorène de Ptoléraéej,il xout que b devienne l'autre diagonale du quadrilatère pour satisfaire
l'équation précédente ^IjÏ»4.29.)«b ne peut devenir diagonale que lorsque les cercles cdrcorsrcritc à
c, d, k, l et c',
d',
k',
l' se ccnfcnâenl en un seul ot la condition
k c » k'c'= l d = t' d' ne peut Ctro remplie que lorsque b est porpenoacu-xaire h a et que a ou b (ou les deux; soit un diarïîire des cercles
circonscrits confondus.
ijous distinguons denc deux cas cti lfs poids des angles inpl^cites sont
égaux aux poids des ançies ooservés, si ceux-ci sont tiçaux entre eux. (Je
sont :
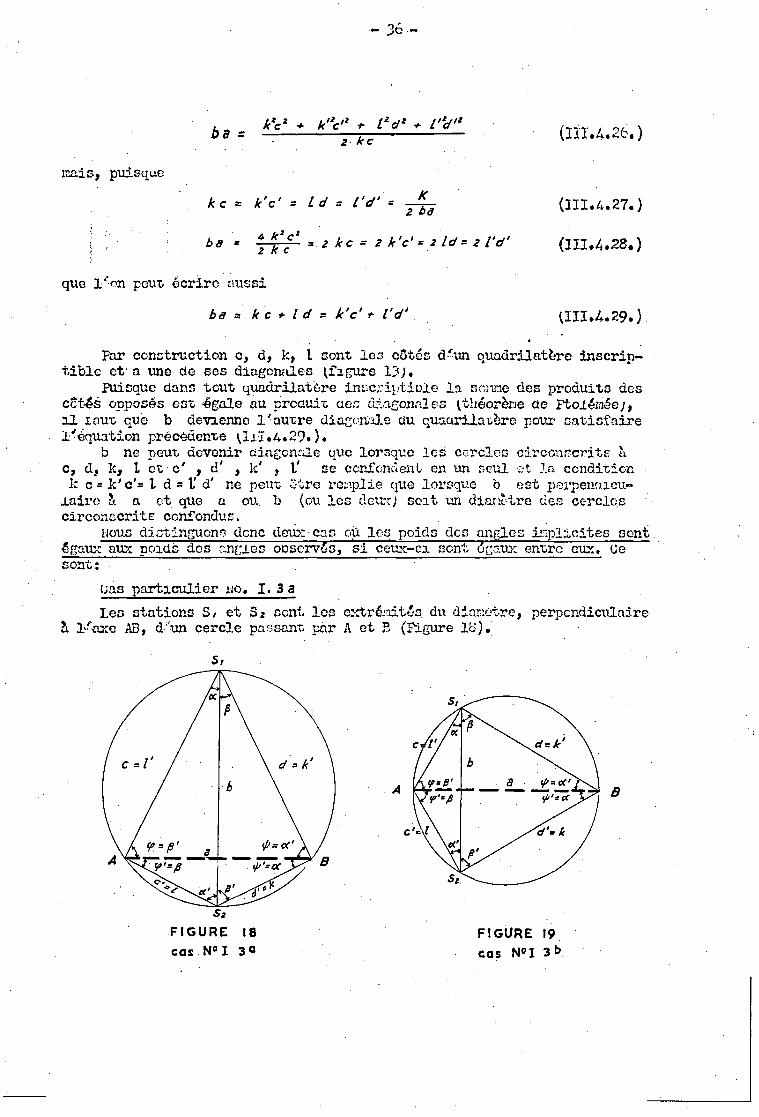
lias particulier j.'.o. I. 3 a
Les stations S/ et Sz sent les cxtrénitês du dianotre, perpendiculaireà l'^axe AB, d'un cercle passant par A et B (Figure lo).
FIGURE 18
cas N«I 3<"
5,
/ focA'/
b
^dzk'
JT'P' a tffscC
"f'/i ifi'sCC
A /1f*k\\&
jy
FIGURE 19
cas N°I 3 b

- 37 -
Cas particulier No*,I«3b«
les sxations S, et S* som; syn&trxques par rapport à l'axe AB Et sur le
cercle dont AB est un diamèxre (figure 19).
lias particulier flo. 1.4»
les stations S, et S2 sont les deux extrémités d'un dianètre du cercle
aont j\B est un autre dxamHre (Heure 20).
Les olénentEs seront
a = 1.0000^
b = 1.00O)
ba = 1.00C0>
c = sin fi c' = cos fi
d = cos fi d' = oin fi
k = sin fi k'- cos fi
l = cos fi l'- B3nfij
> (iii.A.30.;
> (III.A.31.)
FIGURE 20
kc
ba
Kç.'ba
Id
ba
l'd'
ba
sin* fi
cos2 fi
cos2 fi
sin *fi
I -
1 -
* c, «
T7= cos fi
k'c'-
•
*.
Ta~ *m fi
l d
ba- sin
*fi
f -
TT scos*fi
tlll.4.32.)
En introduisant ces valeurs dans notre système d'«équations II.3,35.-
II.3.38., nous obtenons:
M'y* 3 cos* fi + sin* fi (III.4.33.) M2<f''= 3 sin *fi * cos* fi (III.4.34.)
A/Ve 3 sin*fi* cos* fi (III.4.35.) M2f'= 3 cos*fi + sin *fi (III.4.36)

-38-
Etudions quelques valeurs particulières:
a.) Quand fi = 0° <x' = o'
oc = 90° fi' = 90'
S, se confond avec A et S^ avec B
M*<? = 3.00C0 < = M*</>'
M*p> = 1.0000 r M*tf>
(III.A.37.)
(III.4.. 38.)
Cette position n-r-est pas intéressait ce piiisque les stations auxiliaires
se confondent avec les stations principales qui,, par définition, ne sont pasinter-visibles.
b) Quand fi = 45 oc' - 45
ce = 45° fi' = 45
La figure forme un carré dont £2> est une diagonale (Figure 21;
(III.4.39.)
*;.($)* (III.4.40.)
B
cos*fi *(£)*. £ (IIÏ.4.41.)
*V - f *T
= ' r *V = "V=A*V(III.4.42. )
Ceci correspond bien avec notre cas
iio. 1.3.
Quand oi" 45"
jyicota* OC f 3 11-3
,i-.-- , , „
x
Af*ç»o—ï— = __=/ (m.4.43.)
c) Recherchons une valeur optima de </>' par exemple.Pour cela, dérivons l^quation donnant M*tp\ Nous aurons:
vs /2 sin3 fi cos fi - 4 cos3 fi sin fi
que nous pouvons écrire
d£'/' ~ sin fi cos fi ( 12 sin* fi - A cos* fi )
(III.4.44.)
(III.4.45.)
ou bien, en remplaçant dans la parenthèse cos'^ par 1-sin*^et en effectuant
^jL = sin fi cos fi ( 16 sin*fi - +) (III.4.46.J

— ^Q ..
Trois possibilités se présentent pour annuler cette ûérivie:
1} Quand fi= Q° cas étudié précédemment sous a)
2) Quand y5=90° cas diamétralement oppor«» au précédent
WV - l.L'OCO = M2y
M:/= 3.C00O = mV
3,/ quond la parenthèse s'annule, c'est-à-dire quand
/tf sin *
fi = 4-
soit pour
5//7 fi = £
UlI.4.A7o
(IlJ../f../,8.J
fi = 50°
UII./,.49.)
UII./..5C)
(.voir figure 22).(La solutionp= 150* n'est pas pocsibledans notre cas, puisque fi ne peut va¬
rier qu'entre 0e et 90° d-'après la dé¬
finition du cas).
Les erreurs moyennes des angles implicites deviennent alors
sin* fi' ({)*
- £ (III./..51.) cos*fi= (ï±) *= J- UïI.A.52.)
M'V s
1ô~+
17s ir = '-7S00 = m*?' (I1I./..53.)
>"VB w +lï=
T= °-75<7° = M^ (II1.4.5A.)
Cette position est intùrcssanxo car elle donne un poids plus grand que
l'unitu pour un angle inplicitc sur chacune ces stations A et B .
Cas particulier IIo. 1.5.
ha station 3, est- située au ràlieu de la ligne AB et .S2 sur la perpen¬diculaire a AB élevée de S,. (Figure 23;
Les Qérients seront
oc = 90° fi = 90e
cc'= fi'(III.4.55.)

-40-
oC peut varier de 90° (quand S2 est confondu avec S, )sà 0* (quand S2
tsst à l'infini).
c'i d~T C'=7Î1ÏÏ. ^77^7 (HI.4.56.)
k~2C0SOC
l =
2C0S(Xk =
2C0SO(' l'~2CCSCX< (IH»4»57. )
/oo
A* -£- ('/y ar'* ^or;
a a_k c l tf s
'
g cos oc
Sa=
ba"
â. c tgo(' * tg oc)
(III.4.58.)
(III.4.59.)
FIGURE23-riuu ne c j
Pour le cas limite où «"=90* (en admettant que le passage à la limite
soit continu) cette expression prend la forme indéfinie -|§- pour oc = 9o°
d et a étant des quantités finies, étudions le rapport -
l_b
qui devient
z cos oc
J- tg cc> + -f. tg oC
pour d * 90°
(III.4.60.)
Appliquons la règle de l'Hôpital. Après une première dérivation, le nu-
(III.4.61.)
aérateur deviendra
d l_
a sin oc
doc~
2-C0S*0C
et le dénominateur
dbd OC
~
2 COS' OC
La vraie valeur du rapport -r sera
a sin oc
l 2 cos" o(
-£=
-g .= sin oc = î.oooo
2 COS2 OC
Dès lors, dans notre cas ou o( = 90°
kc=
V d'
ba ba
Lies autres termes seront
_e_=£_
a a
k'c'_
V d'_
2 sin oc' 2 cos oC'
ba ba~
ë-( tg oc> t- tg cc)a
(IÏI.4.62.)
(III.4.63.)
(III.4.64.)
(III.4.65.)
Cette quantité s'annule pour oc - 90°

-41-
Notre système d'équations II.3.35. - 11.3.38. devient alors:
A/V '('--f)2 + o + (4-)' * ° (111.4.66.)
M'r = f-J-J2 +(i-o)z + (-Ç)z f o (III.4.67.)
M** = (-%-)' + o + (>--t)* + ° an.4.68o
"'*' = (-T-)' * ° * (4-)' +('-°)Z IXIJ-4.69.;
et puisque c = d = — et que nous fixons a= 1.0000
M*y = 2 (y)* = 0.500O M2<p » z (y)! = 0.5000
(III.4.70.)M*?' = '*2(y)Z = i'SOOO M**'* 1 + 2 (-y)** 1.5000
Ce résultat est indépendant de la position de S« sur la perpendiculaireà AB passant par S/ •
Etudions cependant.le cas où S2 se confond avec S, •
A ce moment a" = /3' = oc = .0 = 90°
c = d = c'= d' = -f- a = 1.0000 (III.4.71.;
k = k'= l = l' = oo b = <x=> (III.4.72.)
A- Z k' Vles rapports T
=
T=
T=
T (III.4.73.)
deviendront alors
b=
a sin oc=
2 sin oc (III.4.74. )
/ . cos oc
pour sin oc =1.0000 y «y (HT.4.75.)
Notre système d'équations II.3.35. - II.3.38. devient alors
"'* - (-h)'* (ri)' * C~hY * (&)' «m
coime c = c'=d?d'=-|- où a = 1.0000 nous aurons
M'y = M*?' = M*<f> = M*<P'= (\)' + 3 (-^)'* 0.7500 (III.4.8O.;

42 -
lîous vérifierons numériquement le procédé pour différentes valeurs des
angles oc'=/8' par la méthode analytique décrite au chapitre II.
l'application directe des formules 31.2.19.et II.2.33.(pages 3 et 9.)n'est pas possible car,pour des valeurs de <X=p tendant vers 90* elles pren¬
nent une forme indéterminée.
Cependant,l'application des formules IJ,2.26.et II.2.40.(pages 9 et 10.)nous donne la possibilité de vérifier les erreurs moyennes quadratiques sur
les angles <p' et </>' .
Uous donnons ci-dessous un tableau du calcul de trois valeurs de M^,par la formule II.2.2.6. Elles correspondent à trois positions de S2
1.Lorsque S2 est très éloigné de.S, (exemple: o(' = p'- i")2.lorsque S* occupe une position intermédiaire, (exemple: -oC'= j3' = 75')3.Lorsque S* est très proche de w (exemple: «•' = p' = 89°)
Ces exemples comfirment bien les résultats donnés par les formules III.A.70.
Angles 1 Sinus 2 Sinus 3 Sinus
oC
&fi'
oC* oc'
oC*- 8'
OC * B
OC'*0'
oC*oC+«+fl
OC-/S'oC'-B
90'
90'/'/'
9/'9/'
180'
2'
27/'
89'
-89'
89'
* /. OOOOOOO
+ / . OOOOOOO
* 0 . 0/ 74524
* 0. 0/74524
* 0. 9998477
* 0. 9998477
t 0. OOOOOOO
* 0. 0348995
- 0. 9998477
+ 0. 9998477
- 0. 9998477
+ 0. 9998477
90'
90'
75'
75'
/6S°
tes'
/80'
,/so°
345'
/s'
-15'
/5e
* /.OOOOOOO
* / . OOOOOOO
* 0. 9 6 59258
* 0. 9659258
* 0. 2588/90
* O- 2588/90
t 0. OOOOOOO
* 0. SOOOOOO
- O. 2588/90
* 0. 2 588/90
- 0. 2588/90
* 0. 2588/90
90'
90'
89'99'
/79'179'
/80'
178*
359'
/'-/'
./'
+ 1. OOOOOOO
> / . OOOOOOO
+ 0. 9998477
* 0. 9998477
* 0- 0/74524
* 0. 0/74524
î O. OOOOOOO
* O. 0 3 48995
- 0. 01 7 4524
* 0. 0/74524
- O. O/74524
+ 0. 0/74524
Calcul de M*<p> d'après la formule JE. 2. 26 e'ieve'e au carre'.
AiBz>
Ci
Di
Bi
ri
+ /. 0003047
- 0. 0006090
t 0. OOOOOOO
- 0. 00OÔO9O
t 0. OOOOOOO
* O. 00/2/76
* 0. 250/405
* t . 0006095
* 0. 250/642
t 0. OOOOOOO
* /.4 . 9282028
* 0 ./250000
t 0 . OOOOOOO
O . /250000
t O . OOOOOOO
* 0 • 0/67463
* 55 . 7/26440
* 222 .85/2388
* 55 . 7/29754
t 0 . OOOOOOO
* 3283.1450- 0 . 0006O9O
t 0. OOOOOOO- 0. '0006090
t O . OOOOOOO
t 0. 000304586
* 2694760 . 2728
* /077904/ . 09/0
* 2694760 . 2728
t 0. OOOO
sin * <p'
M2y»
* / . 5009/42
* 0. 9993909
* /. 5000000
* 334 . 2 76 8582
* O . 0044873
* / . 5000005
t /6/6856I. 6356
* 0. OOOO0O09277
* / . 49995746
D'autre part,en considérant que les rôles des stations S/ et S* sont
intervertis,on peut constater dans le tableau de la page 30 que la valeur de
M*V'M*ptoTi<dL vers 0.50C0 quand les angles o(= J5 tendent vers 90°.Ceci est
valable pour toutes les valeurs de oC'sB' différentes de 90°. (cas étudié p.41.)

-43 -
En résumé;
1) Si les deux stations auxiliaires se confondent au point milieu de AB,les quatre angles implicites se coniondent en une direction et le
poids de cette direction sera
P<p * pv> « p# * pf = /. jjjj
2) Si S/ reste au point milieu de AB et S2 se meut sur la demi perpen¬diculaire à AB passant par S/ les angles v- et >p se confondent en une
direction de poids
Pf>-- P# s 2.0000 et Pf> - P<p> = 0.6666
pour n'importe quelle valeur de oc'= /S' variant de 90° à 0° .
3) Si Sa reste au point milieu de AB et S, se meut sur la demi perpen¬diculaire à AB passant par S* les angles f et </>' se coni'onaent en une
direction de poids
Pp'= P<(>' " 2.0000 et P<p * P<p - 0.6666
pour n'importe quelle valeur de ex= p variant de 90° à 0° .
Cas particulier Ho. 1.6.
La station S( est en un point quelconque de la ligne AB et S2 se déplacesur une droite quelconque passant par S, (figure 24).
Les éléments seront:
\ c = a - d
d = a - c
a = 1.0000
l = ©o
k = oo
(ni.4.81.)
V
\\ x\ /\e^\ /<\ \y
,
•<±_%L/\\\ \V,\ ^\ V
FIGUKE 24
\ Dans le cas général, les quantités
c'»
d', 1/ ,
k' sont finies.
^ _
/ s/n 0+
k' sin «'
sin et s/n p(III.4.82.;
mais sinof» sin j3 puisque eO/S«l80*
donc
b = l *k' s/n ce'
sin p (III.4.S3.)mais, puisque / est infini, b est doncune quantité infinie de jaême ordre que /et k.

(III.4.90.)M2^'=l*c'*d2Mi<p=2c2/*c**d*=M'v>'M2çs=2d*
réduction:aprèsdonc
1.0000=amais (III.4.89.)
(III.4.88.)
(IIJ.4.87.)
(III.4.86.)
(III.4.85.)
c-i=dd-i=c
(4-y+o-o)1+o*(4-)'-»-*
o(-f)'+*+('-°y(t)'-v
°*(t)'*°*C'-f)'="'"
seraII.3.38.-II.3.35.d'équationssystèmeNotre
25FIGURE
\
).2SetS,alorsintervertironsnousmaisfigures,nosde
supérieurepartieladansvalableestchosemême(La25)(figureABlignel'a
surS/depositionladeuniquementdépendentetinvariantsserontplicites
im¬anglesdespoidslesfigures,nosdansABàinférieurepartieladansS2
depositionslestoutespourDonc,solution.ladansn'interviennentS2S/
distancelaniAB,etS*S,parformél'angleniqueremarquonsNous
(III.4.84.)°=
ZHTa
~ba
-"
ba
d'ra
d_ba
dIo=
c'k'
a~
ba
c_
kc
alors
deviennent11.3.38.-II.3.35.d'équationssystèmenotredetermesLes
-44-

45 -
Introduisons dans ces dernières formules les valeurs du cas No. 1.5.
soit c=T d - § a= 1.0000 (111.4.91.J
nous aurons
M*y> = *f4-)2- 0.5000 «V'^t/ = 0.5000
(III.4.92.)
M*<r*i+8fè)**\*ym m*</>'=7 + zfj-)** 1.5000
valeurs qui confirment ce que nous avons trouvé précédemment.
Cas particulier Ho. 1.7.
Même cas que précédeimaent, quand Sz se confond avec S; sur la ligne AB,
l'expression
6 = l * k'stn"fi""
(III.4.93.)
deviendra
à = l + k' (III.4.94.)
car
sin eC' =• sin jB = sin oC II1T.4.95.)
mais, en même temps
k = k' = l = d = oo (III.4.96.)
donc b e 21 = 2 L' = 2 k = 2 k' IIH.4.97.)
le rapport A aevient
T= i'=i=-^ = f (I1I.4.98.)
et notre système d'équations 11.3.35. - II.3.38. devient
"•'(>-h)'* (-&)'* (h)'* (tfY un*»)
"V- (h)' *(»-£)'* (-h)'* (r:)' (nw*l
"'"" ^r * (£)''(>-&)' + (tw)' HII..W01.)
Mais quand S* se confond avec S, sur AB, c = c' d = d'et nos équations se réduisent à:
"**'***(%+%) (IH.4.103.) M'^'' d*2(^*^) (IH.4.104.J
M'*=c + 2(±'* %) (HI.4.105.) M'r*c.2(* + !!1) (IH.4.106O

46
Cas particulier Ho. 1.8.
Les deux stations S, et S* sont sur la ligne AB (figure 26) et non con¬
fondues.
Les éléments seront
I « = 180°
.-<
-.
<,^rc'\V *.» \*'*, ce = o°' =*= " (III.4.107.)
| fi 0°
FIGURE 26 /*' = 180°
Rirtons de l'exemple ÎIo. 1.6. où S/ est sur la ligne AB.
nous avons de'jà
*«'**' f&f UII.4.108.)
Si Si est également sur la ligne AB, nous aurons la vraie valeur du
rapport y?*'
en appliquant la règle de l'Hôpital et nous aurons
§7^-^ - / UII.4.109.) donc b = / * k' (III.4.110.)
et, corme aans l'exemple IIo. 1.7., le rapport -g- devient
k k' l V i
T= T=-F = T=T (III.4.111.)
Notre système d'équations II.3.35. - 11.3.38. devient
"'* - (rr)' ' &)' - <>&)' - (&)' (iii.a.im.)
"'*• • (-h)' - mv - r^r - (-&r aurais.)
ou bien, en développant le terme composé
" ? = ' -
T*
TP*
JP*
Tï>*
~ÏT> (111.4.116.)
M *" = ''1T +
7P+
7P* îr> +
TP (III.4.117.)
kj*, . d c* c>* d' d'1M
* = ' -
f *
TT>*
JP*'
JP*
TP (III.4.118.)
^<? fya1 ça* 4.3* $a* \Llx*li,JLVj»)

- //7-
liais c + d = cW = a = 1.0000 iIH.4.120»;
et nos équations se réduisent à
M'y « <* + £( C> + C» + d* + d>*J ail.4.121.)
"V " d' *
T (C * c» + d> . d") (ni.4.122.;
"'# = c * ±. ( c* + c>* + d* + d'2) (111.4.123.;
a/V = c^ ifc^c'ws </'*; vin^.i24.j
Ce dernier système exprime d'une façon totre à fait générale la valeur
des erreurs moyennes quadratiques des angles implicites lorsque les deux
stations auxiliaires so trouvent en de-3 points quelconques de la ligne AB.
11 est aisé de remarquer que ce système satisfait également le cas
Ijo.1.2, lorsque les deux stations se confondent au point milieu de AB et le
Cvis No. 1.7.| lorsqu'elles so confondent en un "point quelconque de la drc:5 +
e
AB.

- 4-8 -
m 5 . FORMES DE TYPE 3T .
Les deux stations auxiliaires S/ et S2 sont situées de part et
d'autre de la ligne nB et la droite Si S^ passe derrière A (ou derrière B)(figures 27 et 28;.
Les formules générales développées plus haut sont valables dans tous
les cas, mais il est inportant de remarquer le sens des angles observés et
de l'appliquer correctement dans la construction de la figure par la méthode
des points auxiliaires de Collins.
FIGURE 27 FIGURE 28
Nous n'étudierons ici que deux cas particuliers, les autres cr.n pouvantne déduire a5sèment des développements précédente.
Cas particulier î?o. II. 1.
La station S, est sjtn'ir nur le prolongement de la ligne AB, derrière A.
j.i etetion S^ est quelque part dans la partie de la figure inférieure à la
lisne AE.(Figure 29).

30FIGURE
B—•—
Ac'=c
Sz
</=</'_
(III.5.4.)2
~
bbbb
devient—-rapportle1.7.,casledansquemêmeDe
30).(figureABdement
prolonge¬lesurS/avecconfondseS*quandprécédemment,quecasMême
II.2.No.particulierCas
(III.5»3«)c'+d1+t*M*//>2c'=M'#c2*d2+1*M%iM%,-*2d*
BoitI.6.,lîo.casducelleàanaloguedoncestcascedesolutionLa
ababa
ab(II1.5.2.)o
(III.5.1.)
_iV
a
jd_ba
ldÔ«
k'c,ii
a
c
ba
c<<
deviennentd'équationssystèmedutermesleset
©o=l=k=b
casceDans
29FIGURE
-49-

50 -
«at les termes des équations seront
k c e
ba 2<i
k"c>ba
c'
23
ld d
ba 2a
l'd'
ba
d'
2a
(ni.5.5.)
et nos équations se réduisent 8
MMP « d * 2 f-£ * -£) (III.5.6.J
A/V = d * 2 (-£ + £) (III.5.7.)
A/V = c * 2 (•£ + -Ç) (1II.5.8.)
A/V = c * 2 (SL + -£J (III.5.9.)
Ce cas peut également se résoudre en appliquant les résultats trouvés
pour le cas No, 1.8.

- 51 -
3Œ.6. FORMES DE TYPE M.
Les deux stations auxiliaires S, et St sont situées d'un mSue c*tt.
de AB et le prolongement de la ligne Si S2 passe entre A et B
(figure 31).
Ces formes se résolvent a l'aide des formules générales développées au
chapitre II. Elles ne présentent qu'un intérêt nédiocre, car le plus souvent
les erreurs moyennes quadratiques des angles implicites prennent des valeurs
relativement grandes»
Pour obtenir des valeurs intéressantes, il faut que l'élément b de¬
vienne très grand, ce qui s'obtiendra généralement en situant l'une des sta¬
tions le plus près possible de la ligne AB et l'autre le plus loin possible,au même côté.
Ceci nous rapproche du cas particulier Ho. 1.6. traité précédemment et
nous n'y reviendrons pas.

- 52 -
M.7. FORMES DE TYPE M •
Les deux stations auxiliaires S» et S* sont situées d'un même ccti
de aB et le prolongement de la ligne S/ S* passe derrière A (ouderrière B) (figure 32).
Ces formes sont intéressantes car a n'est plus'une diagonale du quadri¬latère auxiliaire, nais un des côtés.
FIGURE 32
Les cas généraux se traitent suivant les développenonts exposés au
chapitre II.
llcus n'étudierons qu'un cas particulier qui, par sa simplicité, permetde ce faire une idée de l'ordre de grandeur de la précision obtenue sur les
angles implicites pour des forces de ce type.
Cas particulier No. IV.1.
Les deux stations S/ et S? sont sur le iaêae cercle passant par A ot B
et la droite S, Si qui les .joint est paral3èle à aB.(figure 33)•
Les points de CoXlins se confondent avec les stations.
Q/~ S2 Q2 = S, et b est identique à la distance S, S2 . Les autres
élénents se confondent deux à deux et nous aurons
c = 1' c'= k' d = 1 d'= k (HI.7.1.)
Puisque la droite b= S/ Sz est parallèle à AB et que le quadrilatère est
inscriptible, les diagonales seront de ïaêue longueur soit
c'» k'= 1 - d (III.7.2.)

- 53 ~
En appliquant le théorème de Ptolémée, nous aurons
ld = kc + ba
ou bien k' C = l'-d' + b a
(III.7.3.}
(III.7.4.}
FIGURE 33
Donc, deux au moins des facteurs
k c k'c' L d
ba ba ba
l'd'
ba (III.7.5.)
seront plus grands que l'unité et corme l'un d'eux peut entrer dans'le terme
de la forme. kc \
(f ~
~FT/ de l'équation donnant M*p par exemple, il
restera de toute façon au moins un terme plus grand que 1 dans cnacune des
équations donnant les erreurs moyennes quadratiqties des angles implicites.Le cas le plus avantageux se présentera quand la droite S, S; se rappro¬
chera de la droite AB.
llcus aurons alors un seul angle implicite pour chacune des stations
principales A et B qui présentera une erreur moyenne quadratique acceptable,c'est celui qui s'appuiera sur le sommet opposé du quadrilatère.

-54-
III. 8. COMBINAISON ENTRE LES POIDS DES ANGLES OBSERVES
ET LA FORME DU RESEAU AUXILIAIRE
Dans les paragraphes précédents, nous avons étudié séparément l'influ¬
ence des poids des angles observés et celle de la forme duréseaxi auxiliaire
sur la précision des angles implicites.IIous avons vu qu'il est toujours possible d'obtenir un poids fixé d'a¬
vance sur l'un ou l'autre ou plusieurs des angles implicites en augmentantconvenablement le poids des doservations (voir: problème inverse, paragrapheNo. II.2»), Ceci est valable pour n'importe quel réseau auxiliaire. Toute¬
fois, cette solution est rarement économique, car elle implique généralementun grand nombre de répétitions des observations.
Il sera donc avantageux de choisir la position des stations S/ et Sa
de telle façon que la précision des angles implicites que nous voulons dé¬
terminer soit aussi grande que possible.Les différents cas particuliers étudiés au paragraphe No. II.3. nous
fournissent un certain nombre d'exemples plus ou moins favorables. Cependant,la possibilité de choisir la position des stations sera généralement limitée
par le terrain et les conditions idéales pour obtenir des poids imposés ne
seront probablement pas réalisées par la seule forme du réseavi. pour arriver
à un résultat pratique satisfaisant, ±1 sera alors nécessaire de jouer sur
les peids des observations pour compléter la différence due à la faiblesse
de cette ferme.
Ceci nous indique clairement qu'il est nécessaire de connaître la posi¬tion approximative des stations S/ et Sz pour fixer un programme d'observa¬
tion rationnel et économique.
m . 9 . RESUME
Dans ce chapitre nous avons cherche a démontrer l'influence de la
forme du réseau auxiliaire sur la précision des angles implicites.Une représentation générale, complète et simple est impossible puisque
notre problème possède quatre variables indépendantes.En étudiant diverses positions particulières des stations auxiliaires
dans toutes les régions du plan de référence, nous remarquons asses vite
qu'un maximum de la précision est atteint simultanément sur les quatre angles
lorsque les stations S, et S* se trouvent sur la médiatrice de AB et que la
distance qui les séparent n'excède pas •§- (cas particulier No.1.2. page 34).C'est la forme que notis adopterons peur notre exemple numérique de
raccordement au réseau (voir chapitre IV).Avec d'autres formes, il est possible d'obtenir une précision égale ou
même supérieure au maximum cité ci-dessus mais pour une partie des angles
implicites seulement, au détriment des autres. (Voir cas particuliers llo.l.l.
page 31 et No. I.4c page 38 par exemple.)Les cas où l'une ou l'autre des stations ou les deux se trouvent sur la
ligne AB n'offrent qu'un intérêt théorique car la condition d'alignement pré¬
sente des exigences incompatibles avec les données du problème,•Les formes de types II, III et IV ne sont pas avantageuses pour la
solution de notre problème.

- 55
CHAPITRE W
Raccordement au reseau principal
g.1 . GENERALITES
Pour étudier le comportement de la liaison fictive AB, nous avons jus¬qu'ici isolé le réseau auxiliaire du réseau principal. Cependant, cette li¬aison fictive n'a aucun P?.ns, si elle n'est pas rattachée à l'ensemble de
la triangulation.En principe, il suffirait que n'importe lequel des sommets A, S,, B
,
S2 du quadrilatère auxiliaire soit rattaché au réseau et que l'azimut d'une
des liaisons soit connu pour que la position relative de la liaison fictive
soit fixée en mène temps que cellr de 1'ensemble.
Toutefois, bien que le rsccorder.ent par les stations S/ et Si puisseêtre avantageux dans certains cac>> nous ne le considérerons qu'en passant.
En effet, notre problème demande de rétablir par un artifice la liaison
manquante AB et de l'incorporer hai-monieusenent aux observations des stations
A et B. Il est dcnc naturel d cptrer le raccordement sur les stations A et B.
D'autre part, le problème qui nous concerne est en premier lieu un pro¬blème d'angles et la pi'écisicn des distances qui entrent en jeu dans la soT
lution n'est pas d'un intérêt primordial. C'est pourquoi, lorsque les sta¬
tions S/ et S2 auront joué leur'rôle poiu* la "reconstruction" de la liaison
manquante, elles ne ne us intéressèrent p].us. La précision métrique de leur
position ne sera pas du mène ordre que celle des stations du réseau princi¬pal. Leur nom l'indique, ce sonL des stations secendaires.
Il est évident que la solution rigoureuse dix raccordement consisterait
dans l'introduction de, toutes les mesures du réseau auxiliaire dans la com¬
pensation du réseau général.Dans ce cas, ce trav;.il serait sans objet. I-o question reste de savoir
si nous sommes bien autorisés à remplacer le réseau auxiliaire par 3a direc¬tion fictive AB, ce qui simplifie considérablement les calculs.
Nous démontrerons que cette substitution est possible par un exemplenumérique théorique choisi pour un cas voisin de ceux qui peuvent se présen¬ter en pratique, (voir paragraphe IV.2.).
Ayant admis que le résultat obtenu de cette manière est accepteble, lamarche à suivre sera la suivante:
a) Condensation du réseau auxiliaire en le considérant indépendant du
réseau primordial.~~~
Il faut remarquer ici que, dans notre étude, nous donnons le même poidsaux angles <x
, fi .,oC' et B' qu'ave: angles $ et $,
Si l'on considère le réseau auxiliaire pour lui-même, il est toujourspossible d'obtenir ce résultat. Far exemple, ci l'on observe aussi les angles
oc * fi et ce'* fi' co:r.e le bon sens l'indique, il faudra alcrs répéter3 fois les observations de <j> et •$ pour que leurs poids soient égaux à ceux
des angles oc, B , <*', fi', <*+ fi et *'+ fi' répétés 2 fois (méthode de Schrei-
ber). Remarquons aussi la possibilité d'ux-iliser les développements du para¬graphe 111,2.(pages 24 et suivantes) pour obtenir une précision fixée d'a¬vance sur les angles implicites.

-56-
b) Calcul des angles implicites et de leurs poids.
D'après les méthodes décrites au chapitre II.
c) Incorporation de la direction fictive aux autres directions des sta¬
tions principales A et B.
Au stage de l'observation du réseau primordial, les stations A'et B
sont complètement indépendantes l'une de l'autre et les observations sur
l'une d'elles ne sont pas forcément de la mène qualité que sixr l'autre,(les méthodes, instruments et observateurs peuvent Stre différents). L'in¬
corporation de la direction fictive devra probablement se faire différemment
suivant les conditions rencontrées sur l'une ou l'autre des statione. Plu¬
sieurs cos sont traités au paragraphe IV.5. Il sera aisé par la suite, d'ap¬pliquer le cas convenant le mieux à l'une eu l'autre ou au?: deux stations
A et B.
î-îentionnons ici que certaines conditions adverses peuvent rendre difi-
cile ou impossible le choix d'un réseau auxiliaire permettant une incorpora-tien favorable et simultanée de la direction fictive poxir les deu>: stations.
On pourra alors scinder le problème en deux et, a l'aide de deux réseauxau¬xiliaires différents, obtenir séparément l'incorporation de la direction fic¬
tive en A et en B respectivement.

- 57 -
g. 2 .EXEMPLE NUMERIQUE THEORIQUE
D'après les conclusions tirées de l'étude de la forme du reseau auxi¬
liaire (chapitre III), nous choisirons une position symétrique des stations
S/ et Si par rapport a l'axe AB e't sur le médiatrice du segment AB. De plus,ces stations seront relativement rapprochées.
lîous compenserons ce réseau deux fois. Une première fois en incluant
toutes les observations et une deuxième fois en remplaçant la figure A S,B S*
par la direction fictive AB à laquelle nous donnerons le poids unitaire,ainsi qu'aux autres directions du réseau, (voir figures 34 et 35).
Pour simplifier le langage nous appellerons "premier système" celui
qui comprend toutes les observations et "deuxième système" celui dans lequelon a substitué la direction fictive AB à la figure auxiliaire.
Uous supposons pour le moment que cette direction fictive est de même
poids" que les autres directions du réseau.
Nous verrons par la suite comment réaliser cotte condition.
La compensation des deux systèmes se fera par la méthode des variations
de coordonnées.la comparaison portera particulièrement sur l'erreur moyenne quadratique
des coordonnées de A et de B et sur celle de l'angle <*>GB de la figure 3»Dans notre cas, cet angle sera celui formé par la direction A-Il et la
direction fictive AB.
On traitera cet angle comme une fonction des inconnues de la'compensa¬tion et son erreur moyenne quadratique ccra obtenue par l'adjonction d'une
nouvelle colonne de termes connus à l'algorithme de Gauss. Ces nouveaux
termes connus seront respectivement les dérivées partielles de la fonction
par rapport aux inconnues.
Nous remarquerons ici que le cas particulier 1.2. du paragraphe III.4nous parait le plus intéressant au point de vue pratiqv.c. En effet, lorsqueles stations auxiliaires S, et S* sont choisies de part et d*a\xtre de la
ligne AB, et a proximité du milieu, de celle-ci, les conditions optima de
précision des angles implicites sont rencontrées et le raccordement de la
liaison indirecte AB au réseau général s'en trouve facilité pour les deux
raisons suivantes:
1. Réduction du nombre des observations.
2. Simplification des calculs.

- 58 -
Comparaison de la compensation de deux réseaux.
L'exemple numérique théorique suivant a été choisi:
1. Avec réseau auxiliaire de liaison indirecte.(1 «r SïSTEKE.)
A—*--y *y
FIGURE 34
2. Après substitution du réseau auxiliaire par la liaison fictive.
( 2«""SYSTEME.)
-y-A-m
FIGURE 35
-x

f er et. 2 *m* SYSTEMES
Registre des coordonnées
Points anciens Points nouveaux (coord. appr.)
Point X en mètres Y en mètres Point XB en mètres Y0 en mètrès
I i o - IS'OOO.OO A t 0 - S 000 .00
E + lO'OOO.OO t O B t 0 v- S'OOO.OO
M ± o + IS'OOO.OO S, + r ooo.oo £ o
m -lO'OOO.OO £ O s2 - r ooo.oo t o
1er SYSTEMEFormation des équations aux erreurs,
re'duites par la méthode de Schreiber
Point Visée Poids Résidua
Co
b
tffici
c
ents <
d
Jes i
e
nconti
f
ues
9 h
Terme
connu
Eçu.
I A + 1.00
-1.00
v1a -2.06
-2.06
+ 0
to
t 0
to
i
I
E A + 1-00 V' + 0-82s -1.65 + 0 2
B +1.00 V -0.82s -1.65 + 0 3
-0-50 vn+ o-ezs -1.65 -0.825 -1.65 to II
m B + 1.00
-/oo
V'JLTB
+ 2.06
+ 2.06
to
+ 0
to
to M
m A +1.00 VVA + 0.82s+ 1.65 + 0 5
B + 1.00 VYt7B
-0.82s + 1.65 to 6
-0.50 Vn+ 0.82g + 1-65 -0-82S + 1.65 + 0 JT
A I + 1.00 VA1 -2.06 + 0 to 7
E + 1.00*A M
* 0-82s -1.65 to e
S, + 1.00 VAS,+ 3.97 -0.79 -3.37 + 0.79 to s
Si + 1.00 VAS,
+ 3.97 + 0.79 -3.97 -0.79 + 0 10
w + 1.00 VAV+ O.B2s + 1.65 to II
-o.zo VA 7.55 ±0 -3.97 + 0.79 -3.97 -0-79 to A
B E + 1.00 V' -0-82s -1.65 to 12
m + 1.00 VBm.
+ 2.06 + 0 to 13
m + 1.00 v'bb -0.82S + 1.65 to 14
s. + 1.00 v's, -3.97 + 0.79 + 3.97 -0.7S to 15
s, + 1.00 % -3-97 -0.79 + 3.97 + 0.79 + 0 16
-0.20 VB -7.53 to +3.97 + 0-79 + 3.97 -0.79 to B
s, B + 1.00rS,B
-3-97 -0.79 + 3.97 + 0.79 to 17
St + 1.00 Vs,st
to +10-31 t 0 -10.31 ÎO 18
A + 1-00 VS,A+ 3.97 -0.79 -3-97 + 0.73 to 19
-0.33 Vs,+ 3.97 -0.79 -3.97 -0.79 + 0 + 11.89 to -10.31 to s,
s2 A + 1.00 VS,A+ 3-97 + 0.79 -3.97 -0-79 to 20
S, + 1.00ys2s,
+ 0 + 10-31 + 0 -10.31' + 0 21
B + 1.00 V5,B
-3.97 + 0-79 + 3-97 -0.79 + 0 22
-0-33 \+ 3.97 + 0.79 -3-97 + 0.79 to +10-31 to -11.89 + 0 St

-éô-
t*r e f 2 eme SYSTEMES
Tableau des gisements approcheset détermination des coefficients de direc tion
Point Visée Gisement
calcule'
Distance
calcule'e
(en Km) pour 1Km pour 1 Km
a b
I A 90° IO.OOO 20.63 O 2.06 O
n A 206°33/54.17 11.18 1 9.22 18.45 O.B2 1 .65
Bo / "
153 26 OS.ttJ 11.18 1 9.22 18.45 0.82 1 .65
m B 270° IO.OOO 20.63 O 2.06 O
w A 333026"05r83 11.18 1 9.22 18.45 0.82 1 .65
Bo / //
26 33 54.17 11.18 1 9.22- 18.45 «Q.8 2 1 65
A I 270* IO.OOO 20. 63 O 2.06 O
H 26*33' 54''l7 11.18 1 9.22 18.45 0.82 1 .65
S/ 78*41' 24^20 5.099 20.22 4.05 3.97 0.79
s, lOl" 18' 35'80 5.099 20.22 4.05 3.'97 0.79
ISO 153* 26'05''83 11.18 1 9. 22 1 8.45 0.82 1 -65
B E 333° 26' 05*83 11.18 1 9.22 18.45 0.82 1 .65
m 90* IO.OOO 20.63 O 2.06 O
ET 206° 33' 54*17 11.18 1 9.22 18.45 0.82 1 .65
s* 258° 4l' 24*20 5. 099 20.22 4.05 3.97 O .79
s, 281° 18' 35JBO 5.099 20.22 4.OS 3.97 0.79
S/ B IOI° 18' 35''80 5.099 20.22 4.05 3.97 0.79
Sz 180* 2.000 O 20. 63 O I0.3I
A 258* 4|' 24*20 5.099 20.22 4.05 3.97* 0.79
s2 A 281* 18' 35?80 5.099 20.22 4.05 3.97 O .79
S/e
0 2.000 O 20. 63 O I0.3I
B0 / //
78 41 24.20 5.099 20.22 4.OS 3.97 0.79
Di'rt
1
'ction 1tictive
A B 90* IO.OOO 20.63 O 2.06 O
B A 270* IO.OOO 20.63 O 2 06 O

/er ef 2 eme sySTEMES
Equations d'observation
Point Visée Poids Equation
I
E
E
M
m
m
A
A
A
A
A
A
A
B
B
B
A
I
E
m
S,
Si
*r.OO
*l OO
*I.OO
t/.OO
*l.00
*I.OO
*I.OO
*I.OO
*I.OO
*I.OO
+ I.OO
«za * % * °z = fzA = z'a * 3ia L * 6" Va
«rA * vaA + °ïï=Pïïa = zba * 3ba %a * *>ma Ha
«UB * VJTB *°ïï= 0BB = ZSB * 3Mg t,B * bHB VB
«mB * vmB *°m' Pbb = zmb * amB %b + 6mb Wb
«JZb* y*B + °E= PlSB - Z&B * aBB £B * bSB HB
«JSA * VNA + 0JS= #KA - Z&A * 3lsA %* * bKA ^A •
«AI + VAI * °A = ?AZ = ZA1 ~ aAlî A- t>AI Va
«AU *VAH*°A- PaJT r ZAÏÏ - SAJL% A~ *>AJI Va
«AS * VAS + °A - Pas ' ZAE~ 3AK % A' bAJ7^A
«AS, * VAS, *°AS PAS, = ZAS,"
3AS, $ A- bAS, Va * 3AS, £s, * bAS, Vs,
«AS, * VAS, * °A = #AS, ' ZASZ ~ 3AS, $A'1>AS,Va* âAS, $ S,+ *AS, VS,
A B *I.OO «AB +VAB * °A~ $AB * ZAB~3AB^A - bAB^A * 3AB ffl * *>AB ^B
0)
0)
0)
0)
0)
E
m
M
s2
-S/
*I.OO
*I.OO
*I.OO
*I.OO
*I.OO
«BK * VBU * °B = 0BX s ZBÏÏ - aBU £b " bBS VB
oeBm*vBm*°B ~PBm " zbb ~ aBm ^b - bBmvlB
^Bnr * vbu *°b ~ $bn - zbiv ~ 3bh Ïb- bBI/ ^B
«BSz * VBS* * °B = <?BS, ' ZBS, "
3BS, %B ~ bBS, VB * 3B$t ts + bg5lVs,
«BS, *VbS, + °B 'ÏBS,* ZBS, -3BS, Se- bBS, VB * 3BS,$S/bBS,Vs,
B A *I.OO «SA * VBA *°B= #BA * ZBA " dBA $ B" bBA ^B * 3BA $A * b BA ^A
s,
s,
s,
Si
Si
s2
A
Si
B
A
s,
B
/.OO
*I.OO
*I.OO
*I.OO
tl.OO
*I.OO
«S.A* VS,A *°S, =?S,A = ZS,A -aS,Aês,-bS,A^S,*3S,A$A*6S,AVA
"s^* "s,s, *°s, =$s,s, =zs,s,-as,sz $s, -bs,stVs,*as,sJs2-hbs,stV S,
«S.B + Vs.B *°S, =Ps,B = ZS,B ~aS,B $ S,~ bS,B V S+3S,B $B * bS,B * B
«S,A * VS,A * % = ?S,A = ZStA ~ SSlA ES, ~
t>StA^S,* 3St A Îa* 6S,aV A
«s,s, * vs,s, * °st = 0s,s, = Zs,s, ~ 3s,s2 is, ~bs,s,VSi+tszs.ïs+i's&y S,
«S,B + %B + °S,= $S,B = ZS,B- 3StB %S-bSlB'*Js,*aS1B ^B*bS,BVB
Les équations encadrées sont celles qui correspondentaux observations fictives de la liaison indirecte AB-

+S.**S2
to
-0.3322
-6.2726
8322
-0
2726
t.
*-3.133*
0t
12*80
+10
7-583*
to
+2*.295l
-25.5*30
-2*.29SI
-25.5*30
to
11.1678
*to
**7.*eit
[pbs
]H
[pbb
][p
bg]
[pbf]
[pbe]
[pbd
][p
bc]
[pbb]
[pas]
[pak
][pab]
[pag]
[paf
][pae]
[pad
][pac]
[pab]
[paa]
1.0*3*
+to
3.1310
+to
-2.7150
io
-0.2080
1.0*5*
+-0.2080
to
to
+15.73**
to
-13-6*36
to
-t.O*S*
*S.2S36
-1-0*6*
-5.2536
Si
22
-3,1363
to
-0.62*1
-3.1363
0.62*1
+to
to
-3.1363
-15.7609
3.1363
+*IS.T609
21
20
-1.0*5*
0+
-2.7150
ot
3.1310
+to
-0-2080
-1-0*5*
-0.2080
to
to
+13.6*36
0t
-15.73**
0+
1.0*56-
+*S-2536
1-0*6*
+5.2S36
-
5/
3-1363
+to
62*1
0-
3.1363
+0.62*1
+to
to
3.1363
+-15-7603
-3-1363
15.7609
*19
18
17BIt
0t
to
to
to
0+
to
to
0.617*
+to
1.1897
+5.9788
+-1.1897
5-9788
+to
-11.3*02
IS
14
13
12A
*i.722S
to
2.7225
+2.0*18
+to
1.3612
*O-6S06
*II
-3.1363
to
-0-62*1
-3.1363
0.62*1
+to
to
-3.1363
-15.7609
*3.I363
15.760)
+10
3-1363
+to
-0.62*1
3.1363
+0.62*1
*to
to
3.1363
+-IS.760S
-3.1363
15.7609
+9
2.7225
+to
2.7225
+-0.6806
to
-1.3612
0.6806
+8
4.2*36
+io
ÎO
*2*36
+7
-2.0*18
to
-1.3612
0.6806
+-1.3612
-1.3812
to
-0-6806
0-3*03
+-0-6B06
0.3*03
-
2.7223
+to
2.7225
+0*18
2+
to
1.3612
*0.1806
*
6sm4
-3.*030
0+
-1.3612
-0.6806
-1-3612
1-3612
+to
0.6806
*0.3*03
+0.6806
*-0.}*03
n
2.7225
+to
1-2.7225
-0-6806
io
-I.3SI2
*0.lSOi
32
*.2*36
-to
to
-*.2*36
X
tt.2*36
+io
to
*.2*36
*l
pbs
pbk
pbb
pbg
pbf
pbe
pbd
pbc
pbb
pas
pak
pab
pag
paf
pae
pad
pac
pab
paa
Ns
normales
équations
des
coefficients
des
Formation
fSYSTEME
er
/

8.5836
+io
-0.8322
6.2726
+-0-8322
6.2726
-t!0.2*80
-3-60**
io
-2*.2SSI
-25.5*30
951
22*.
+-25.5*30
to
**7.*8I6
[pds]
[pdk
][pdh]
[pdg
][P
df]
[pde
][p
dd]
[pcs
][p
ck]
[pcb
][pcg]
M[pce]
[pcd]
[PCC
]
0.2080
+to
3.1310
+0
tISO
2.7
+to
-0.2080
-6.2990
to
-15-73**
to
13.6*36
+to
1.0*5*
+5.2536
-
Sz
3.1310
+to
-0.62*1
3.1363
+0.62*1
+0.62*1
t-
0t
to
3-1363
+-15.7609
-3.1363
15.7609
+22
21
20
0.2080
+0
+-2.7150
0t
3.1310
+to
-0.2080
-4.2082
to
-13.6436
0+
15.73**
+0
+-1-0*5*
-S.2536
S,
19
3.1363
-0
t-0.62*1
3.1363
-0.82*1
+to
to
-3.1363
•15.7609
3.1363
+15.7609
+
18
17
0+
to
to
to
to
ÎO
to
0.617*
+to
-1.1897
5.9788
++1.1897
5.9788
+0
+-11.3402
B-3.1363
to
0.62*1
--3.1363
0-62*1
+to
0+
-3.1363
-15.7609
3.1363
++15.7609
16
3.1363
+ÎO
-0.62*1
3.1363
+0.62*1
+to
to
3.1363
+-15.7609
-3.1363
15-7609
+15
2.7225
+to
2.7225
+-0.6806
to
-1-3612
0-6806
+14
0t
to
to
4.2*36
+to
to
1.2*36
+13
2.7225
+to
2.7225
+2.0*18
+to
1.3612
+0.6806
+12AII10
-1-3612
to
-1.3612
0.3*03
+to
0.6803
+•0.3*03
987S+2.7225
to
2.7225
+-0-6806
to
-1-36/2
0.6806
+6s
-*.2*36
to
to
-*.2*36
m*.2*36
+to
0+
*.2*36
+4
-1-3612
to
-1.3612
-1.0209
to
-0.6806
-0.310)
ïï
2.7225
+to
t2.7225
+2.0*18
to
1.3612
+0.6806
+32ii
pds
pdk
pdh
pdg
pde
pdd
pcs
pck
pcb
pcg
pcf
pcet
pcd
pcc
NS
(suite)
normales
équa
tion
sdes
coefficients
des
Formation
1SYSTEME
Ier

*/32.2830
to
132.2830
+56.7392
+to
iO
56.7332
+1.66**
+ta
•130-6/86
0i
132.2830
+*50.*ir8
to
ÎO
-6-30*4
to
+56.7332
[pbs]
[phk
][pbb]-
[pgs]
M[pgb]
[pgg]
[pfs]
«[P
fb]
[Pfg
][P»l
[pes]
[pek]
[peh]
[PI]
[pef
][p
ee]
-*7.t2*0
io
-*7.I2*0
oi
to
ÎO
te
S.*300
+ta
*0.8620
+to
-35-*320
to
to
to
to
to
to
Sz
0.62*1
+to
0.62*1
+12.62*6
+to
-3.1363
15.7609
+-
22
+106.2961
to
106.296/
+to
to
to
to
ÎO
to
-106.296/
ÎO
+106.2961
to
0+
to
to
0+
to
21
0.62*1
+to
0-62*/
+18-8972
+to
3.Z363
++15.7609
20
-3S.*320
to
35A32Q
-to
ÎO
to
to
-6.2620
to
*0-8620
+to
-*7.t2*0
to
iO
0t
to
to
0+
s,
0.62*/
+to
0.62*1
+12.62*6
+to
-3-1363
15.7609
+19
+/OS.2961
to
*W6.296/
to
to
to
0t
0i
to
-106.2961
to
106.2961
+ÎO
to
to
0+
to
oi
ta
0.62*/
+to
0.62*1
+8372
S.
1+
to
3.1363
+15-7609
+17
-0./2*8
to
-0./2*8
-2.5250
to
0.6272
+-3.1522
0.6272
-to
0-12*8
+0-6272
--0.12*8
-6-30**
0+
0.6272
+-3.1522
-0.6272
-3.1522
B
0-62*/
+to
0.62*1
+18.8972
+to
3.1363
+15-7609
+IS
0-62*/
+to
0.62*1
+12.62*6
+to
-3.1363
15.7609
+15
14
13
-0-12*8
to
-0.12*8
3.779*
-to
-0-6272
-3-/522
0-6272
+to
0.12*8
+0.6272
*-0.12*8
-6.30**
to
0-6272
--3.1522
0.6272
+-3-1522
0.62*1
+to
0.62*1
+18.8972
+io
3-1363
+H5.7609
12
A11
10
0-62*1
+to
0.62*1
+*12.62*6
to
-3.1363
15.7609
+987
<
6SM4JT32It
pbs
phk
pbb
pgs
pgk
pgh
pgg
pfs
Pfk
pfh
pfg
prr
pes
pek
pab
peg
pef
pee
NS
fin]
et
(suite
normales
équations
des
cients
coeffi
des
Formation
SYSTEME
*r
/

- 65 -
/ *r SYSTEME
Equations normales
ÎA YlA u TlB U 71Sf U, Hs2Terme
connu=
f 47. 48/6 tO + 11.1878 to -2S.5430 -24:2951 -25.5430 + 24.295/ to + 7.5834
+ 10.24-80 to -3.1384- + 6.2726 -0.8322 + 6.2726 -0.8322 t 0 * 5.4452
+ M.ÏS16 to -25.5*30 + 24.2951 - 25.5430 -24.2951 to + 7.5834
+ 10.2*80 -6.2726 -0.8322 * 6.2726 -0-8322 to +5:4452
+ 56.7392 ÎO -6.3044- to to -0.65/2
+132.2830 to -130.6/86 io to
+ 56.7392 ÎO to - 0.6S/Z
+132.2830 " ÎO
Détermination de l'erreur noyenne quadratique de l'angle
formé par la direction A-II et la direction fictive AB .
Cet angle est une fonction des inconnues
~ - '(**. **> *B. yB) - rarc * ^£ ~r arc >s ¥^r*B-*A *JZ *A
(17.2.1.)
et les termes connus, qui nous intéressent pour les introduire dans une
nouvelle colonne de l'algorithme de Gauss, sont:
&F âFF> = TZ = aAB-*An * + '** (17.2.2.) Ft=T7
» + bAR-+/.es (17.2.3.)Sx
F- Z-1 Sx„
8*~* _ Z'06AB (17.2.4.)
F, = -jr-'
- o7
&Xe
&Ya
ôf
t O
(17.2.6.) Fe =
f-«
(IV.2.8.) /> - |f -"
(IV. 2.5.)
(IV.2.7.)
(17.2.9.)
Ce seront les mènes termes que nous introduirons dans les deux
systèmes.

I
-0.1*03
10.3555
*0.39*7
-/.OOOO
0t
0t
0.3897
+-0.9872
0i
0t
0.0917
+-0.232S
0.0033
+
0O86
0.
-
0.09/7
+-0.2325
0.0033
-
0-0086
+
0.9938
-
2-5125
+
oi
ot
-1.0000
1-2-5330
Système
2fmt
le
dans
obtenu
celui
avec
0t
12.3711
0S
10.059/
-1.57*3
10.11*0
-P.61**
Ot
0.
t
0t
0t
0+
0t
0t
e+
-1.0000
0î
0t
0t
0t
0t
Ot
0t
0t
0t
-0.9872
0t
0+
0t
0t
0i
0t
0i
0t
0t
0i
0t
0î
0t
0t
0t
IISS
0.
-
0t
-0.1170
0t
0+
0t
0t
0t0.6607
*
0t
Ot
-0.6693
0t
0t
0±
0t
IISS
0.
-
0t
835
-O.O
0t
8/2
-O.0
0t
Ot
0t0.6607
-
0i
0î0.1577
1
0+
10.51/6
0t
0t
*l.2580
0î
8322
0.
+
3.8798
1
0.H22
+-3.8797
0î
0t
ot
oi
0î
0t
ot
0t
et
0t
-97-01*1
0î0-1272
--20.0917
74
o.06
--I2.*29*
'132.2830
rcompare
àRésultat
0.789
uo=
M
0.6225
=M'uj
10.0**8
-O.t-785
0t
0t
O.0936
+-1.0000
0t
0t
0.07*/
+
79/8
0.
-
-0.003/
0.0976
+
10.0730
00
-0.78
0.009/
+-0.0975
0.0730
1
0.7800
-
0.3987
-
10.6633
*
ot
0t
ot
OOIO
0-
1
I.OOOO
-
IO-67(2
10.0*99
0t
89*7
O.
-
0.2167
--1.0219
1I.OOS8
10.6670
io
ei
0t
0t
0t
0t
0t
0t
0t
0t
0t
0t
0t
0i
-/.OOOO
0t
0t
0t
0t
0i
0î
0t
0î
-0.79/8
0t
0t
0i
0t
0t
0t
-0.37/0
*e.*686
0t
0t
0t
0t
0t
-0.3**7
Ot
-0.*3S3
0t
0t
Ot
0t
10.3710
0.1*33
+
0î
6/20
-0.
0t
0t
0t0.3**7
-
Ot
10./026
0t0.5373
-
0t
0i*.7I25
*
3.1123
-
2.5233
*
3.3325
+
*.079l
*
0.6SI2
-
0î
0t
0t
ot
0t
ot
0î
0t
0t0-5031
--13.0673
O.SOS3
-
13.0683
+
0t
0î
3*60
/7.
-
2.0391
-
8.*333
1
3.8388
1-13.7336
56.7332
+
-0.02*1
*2.*0/3
0t
0t
0t
0t
0100
0.
+-1.0000
0t
0t
0.O0H
+-0.1170
-O.O067
*0.6693
--0.O0II
-0.1170
0.0067
*-0.6633
0.0127
-
1.27**
*
0+
0t
0.9872
-98.2323
0î
0002
0.
1
OOOO
t.
-
33.5671
+
0.021*
0.0579
o.o**s
0.027*
0./233
0.26*57
0.O32*
to
1O.053I
1.57*3
+
0.13*0
»
33*
0.6
+
Ot
0t
0t
0t
0t
0t
0i
0t
0t
0î
0i
0î
0t
0t
0t
0t
0t
0î
OOOO
/.
-
0i
0t
0t
0i
0î
0t
0t
-0.1170
0t
0t
0t
0t
0t
0i0.6693
+
0t
0t
0i
0t
0358
0.
-
0t
-0.08/2
0t
0i
0i
0tO.lS77
-
0t0.5//6
-
0i
0t0.8322
-
3.8798
-
0.**22
++3.8797
0î
oi
0t
oi
0t
ot
0t
0t
-0-1272
*20-O9!7
0-0676
-
*29*
12.
+-130.6186
Ot0.9092
1
ar
11.06
*
0.3033
--/3.0678
0t
0t0,1272
--20.09/7
0.0676
--12.*29*
132.2830
+••
tvan
ui
s
iOt039*
-1.1100
0r
0i
0t
0t
0+
0t
0.03*9
+-1.0000
O.OI63
+-0.*686
0.0/52
*
0.*3S3
-
-0-0/63
0.*685
+
0.0/52
1
0,*I51
-
0.2079
-
S.95'6
*
ot
oi
0t0.0010
+
0.79/8
+-22.6618
0t0.0010
-
/.oooo
-
29.6221
*
résultat
te
donne
10.2367
-1.0229
-1.0038
10.6670
0t
0t
0t
0ï
0t
0+
0i
0ï
0t
0t
0.t
0t
0t
0t
0t
0t
0t
0i
0t
0t-1.0000
-0-*686
0t
0t
0t
0t
0t0.*3S3
-
0t
0t
0t
-0.1*35
0t
10.6120
0t
0i
0î0.1026
+
0t
-0.5379
0t
3.3329
+
2.5233
*
3.3325
-
*.073l
1
0.65/2
-
0t
0t
0t
0t
0t
0.5091
--13.0671
0.3033
i
0683
13.
*
0î
2.0331
+
8.«333
-
3.8389
'
7136
11.
-
6.loto
-
0.5091
-
13.0671
t-
0.5093
i-11.0631
0t
-2.0333
S.*993
-
3.8389
-
71)6
11.
-
56.7192
»
<J
cfonction
la
de
résolution
La
-0.05*3
10.5052
0t
0t
0t
0t
0ï
0i
0t
0t
0.1076
+-1.0000
0i
0i
0.0323
*-0.3062
0t
0t
0.7658
-
1125
7.
+
0tio
0.//70
*-1.0370
0.*686
-
*.33I3
1
0.1170
+-1.0870
iO.*686
-4.3519
1.0000
-
9.2870
+
^,
0t
10.5052
0t
0t
0i
0i
0+
0t
0i
0t
0t
0t
.
°-
0t
0t
0t
0t
0t
0t
0i
0t
0t
0t
-/.OOOO
0t
0î
0t
0i
0t
-0.3062
0t
0t
0t
0t
0t
0t
0t
i-1.6673
0t
**52
S.
+
oi
0t
oi
0t
0t
-0.25*8
0t0-9322
-
0t
9207
-/.
0t6.2726
+
OÎ
-0.25*0
oi
-0.8322
Ct1.9207
*
OÎ
-6-2726
to
610
-0.9io
f/0.2*80
10.052*
-2.3521
0t
0t
0t
0t
0t
0t
0i
0t
0+
0t
*0.0222
0000
/.
-
0t
0t
-0.0052
0-2356
+
0./232
-
5.7368
+
0t
oi
0.6693
1-30.0190
0.*353
+-19.5251
0.6693
-
30.0/90
*
*353
0.
1-13.5231
0+±0
/.OOOO
-1**.8*58
0t
-0.292/
-2.06
0+
0t
0i
0i
0t
0t
0t
0t
0t
0i
0t
0t
0t
0t
0t
0i
0t
0000
-1.
0i
0t
0t
0i
10.2356
0t
0î
-1.7865
7.583*
i
0t
oi
0t
oi5-7233
-
2951
-2*.
0t
6.0173
1-23.5*30
oi5-7233
'12*.2S5I
0i6.0179
+-25-5*30
toO
tÎO
to
2.6358
-1*7.68/6
-O-I6I0
1.65
1
0i
0î
0t
0+
0t
0t
0i
0i
0t
0t
0t
0t
0-0975
+-I.OOOO
0i
0t
-0.5313
S.**S2
i
oi
oi
1-0.0812
-0.8322
0.6120
*
6.2726
-
0.08/2
*
0.9322
-
-0.6120
6.2726
•
0.3062
+-3-/38*
to
to
1.0000
-
/0.2*»0
+
0t1.65
1
0i
0+
0t
0t
0t
0t
0i
0i
0t
0t
0t
0t
0t1.0000
-
0i
0+
0t
4*52
5.
+
oi
0t
0t
-0.8122
0t6.2726
-
0i
-0-S122
0t6.2726
+
*0
-3.Z38*
to
to
to
10.2*80
1
-0.026/
1.2*
1
0i
et
0ise
0t
0i
0:
0i
0i
0+
0t
0:
0t
0t
10-0210
-1.0000
-0.IS37
7-583*
*
0t
0t
0-51/6
-
351
22*.
*
1-0.5373
-21.5*30
O.S//6
r-24.2351
0.5373
i-25.5*30
0î
0t
-0.2356
111.1878
0±to
1.0000
-1*7.4616
U)
Vst
$S2
Vs,
h,
Vb
Kb
Va
4a
z:
Connu
Terme
Vs2
hi
Vs,
uVb
ts
Va
4a
poids
aux
équa
tion
sdes
Résolution
normales
équations
des
Résolution
GAUSS
DE
ALGORITHME
SYSTEME
Ier

- 67 -
8 -0.0033
+ 0.0917
+ 0.0033
+ 0.09/7
+ 0
+ 0.3897
-0-0033
+ 0.0917
+ 0-0033
+ 0-09/7
10
+ 0.3897
+ 0 î 0
t*r SYSTEME + 0-39*7 + 0.3947
7 + 0-0730 10 + 0-0730
Calcul des poids* 0-009/ to + 0.009/
/+ 0.0730 + 0 + 0-0730
des coordonnées -0-009/ to -0.009/
+ 0-074/ to + 0.074/
to
+ 0-0936
10
10
to
+ 0-0936+ 0 to 10
6 + 0.0034
+ 0.09/6
-0.0034
+ 0-09/6
to
+ 0.3947
to
+ 0.3896
to
+ 0
to+ 0
10
10
to
to
-0-0033
+ O.O905
+ 0-0033
+ 0-0905
ÎO
+ 0.3847
to
+ 0.3896
+0-006 7
+ 0.00//
-0.0067
+ 0-00//
SO
+ 0.0/00
ta
t 0
s + 0-0730 + 0 + 0-0576 to + 0.0/52
-0.0091 1 0 + 0.0072 to -0.0/63
+ 0-0730 10 + 0.0578 to + 0.0/52
+ 0-0091 to -0-0072 10 +0.0/63+ 0.0937 10 + 0-0588 t 0 + 0-0349
to to + 0 10 to
+ 0.0741 10 + 0-074/ to to
to to + 0 to ÎO
4- to + 0.0342 + 0.0004 -0.0342 -0.0004 to
+ 0.0457 -0-0043 + 0-0/07 -0-0043 + 0.0/0 7 + 0-0329
to + 0.0342 -0-0004 -0.0342 + 0.0004 to
+ 0-13 76 + 0.0043 + 0. 0/07 + 0.0043 + 0-0/0 7 + 0-/076
+ 0.009S + 0-0439 t o - 0.0347 to + 0
+ 0.0918 to + 0-0462 + 0 + 0.0456 10
- 0.0092 + 0-0347 to -0.0439 to 10
+ 0.09/B to + 0-0456 to + 0-0462 to
3 + 0-0539 to * O-03/S '0-0023 + 0.03/8 -0.O02Z -0-0052
to + 0 -0-0040 - 0.06/3 + 0-0040 + 0-06/4 + 0
* 0.0S03 10 + 0-03/8 + 0-0023 + O-03/B + 0.0022 + 0-0222
to to + 0-0040 - 0.06/3 - 0-0040 + 0.06/4 10
+ 0.0731 + 0 + 0-0408 + 0 + 0.0323 to to- 0-0034 + 0 to -0-2642 10 +0.2608 10
+ 0-0730 + 0 + 0.O323 to + 0-0407 to to
+ 0-0034 to to -0.2608 to + 0.2642 + 0
m*to + 0 + 0 -0-0447 + 0.0003 + 0.0447 - 0-0003 to
*0.I375 to + 0.0/40 + 0.0056 + O.0O74 + 0. 0056 + 0-0074 + 0.0975
to ±0 + 0 -0.0447 - 0.0003 + 0-0447 + 0.0003 10
+ 0.0*57 to + 0.042/ -0.0056 + 0.0074 -0-0056 + 0.007* to
-0.0092 to +0.0028 - 0.0573 10 + 0.0453 10 to
+ 0.09/7 10 + 0.028/ to + 0.0320 to + 0.03/6 + 0
+ 0.0032 to -0.0028 -0.0453 :o + 0.0573 10 + 0
+ 0-0917 to + 0.028/ to + 0.03/6 + 0 + 0.0320 10
M ;+ 0.0903 10 -0-0127 î o + 0.0333 + 0.00/7 + 0.0393 + 0.00/7 + 0-02/0
to to to to -0.0049 + 0.0469 + 0.00*9 -0-0469 + 0
3 + 0.0S39 to -0.O2/3 to + 0.0393 -0-00/7 +C.0393 -0-00/7 + 0
4 10 to to ÎO + 0.00*9 + 0-0469 -O.0049 - 0.O469 10
S * 0-0731 to -0-0/72 + 0 + 0.0504 to + 0-0399 to ÎO
« *0.0033 to +O-00OB 10 10 + 0.20/9 + 0 -0-/994 to
7 + 0.O730 to -0-0/72 to + 0.033S + 0 + 0.0503 to 10
8 -0-0034 to -0-0008 + 0 to +0./393 10 -e-2019 10

-68-
2 eme SYSTEME
Formation des équations aux erreurs,
réduites par la méthode de Schreiber
Point Visée Poids RésiduCoef
a
f. des
b
inconi
'c
lues
d
Terme
connu
Eau.
NS
I A * 1.00
-1.00
V'IA
-2.06
-2.06
+ 0
+ 0 t 0
l
I
M A + 1.00 VXA + 0.82$ -/.6S + 0 2
jr B + 1.00 VXB -0.82S -t.6S + 0 J
-0-50 vu + 0.82s-I.6S -0.82s -I.6S + 0 JL
m B + 1.00 VMB
+ 2.06 ±0 + 0 4
-1.00M
+ 2.06 + 0 to m
M A +I.OO VJJTA
+0.82s +I.6S t 0 s
w B + 1.00 V'l7B -0.82g +1.6S to 6
-0.50 V+ 0.82s
+ I.6S - 0.82$ + I.6S to JZ
A I + 1.00 VAI
-2.06 t 0 to 7
A E + 1.00 V'AU
+ 0.82s -l.iS t 0 8
A B + 1.00 VAB
+ 2.06 t 0 -2.01 + 0 to 9
A ET + 1.00 vA]Z
+ 0.82s + I.6S to IO
-ois VA+ 1-65 £0 -2.06 + 0 to A
B JT + 1.00 VBJT -0.82s -I.6S to II
B m + 1.00 VBM
+ 2.06 to to 12
B m + 1.00 VBXZ
-0.82S + /.6S to U
B A + 1.00 v'ba-+ 2.06 ±0 -2.06 to to 14
.« VB+ 2.06 to -1.65 + 0 to B

8.1676
+[pds]
to
[pdk]
8.1675
+[pdd
]13.0311
+[pcs
]to
[pck
]to
[pcd
]+13.0311
[pcc
]+5.4452
[pbs]
to
[pbk
]-2.7224
[pbd
]to
[pbc]
3.1676
+[pbb]
6.9241
+[pas
]0
+[Pak]
to
[Pad]
6.1070
-
[pac
]o
i
[pab]
+13-0311
[paa
]
0+
to
to
-0-6806
ÎO
to
-0.6806
.to
to
0t
-0-2111
to
to
0.8493
+to
-1.0609
B
to
ÎO
ÎO
4.2436
+to
0+
4.2436
+to
to
to
0t
to
to
4.2436
-to
4.2436
+14
2.7225
+0
++2.7225
-0.6806
0+
-1-3612
0.6806
+13
0î
to
to
4.2*36
+to
to
+4.2*36
12
2.7225
+0
++2.7225
2.0*18
+0
+1-36/2
+0.6806
+II
to
0+
0+
-1-0609
to
0t
-1.0603
to
to
to
+0-1652
to
to
0-6438
*to
-0.6806
A
+2.7225
0+
2.7225
++2.e*/8
0+
1-3612
+0.6806
+10
0t
to
0+
4.2*36
+to
to
*.2*36
i-
to
to
to
ta
to
0+
-4.2436
to
4-.2436
+9
+2.7225
0+
+2.7225
-0-6806
to
-1-3612
*0.6806
S
0t
to
to
4.2436
+to
to
4.2*36
+7
-1.36/2
0+
-1-36/2
0-3*03
+to
0.6806
+-0.3403
-2.04/3
to
-1-3612
0-6806
+-1-3612
-1.36/2
to
-0.6806
0-3403
+-0-6806
0-3403
-JT
+2-7225
to
2.7225
+-0-6806
to
-1-3612
10.6808
6
+2.7225
to
+2-7225
+2.0*18
to
1-36/2
++0.6806
S
to
to
to
-4-2*36
to
to
-4.2436
M
0+
to
0+
4-2*36
+to
to
4.2436
+4-
-1.36/2
to
-1-3612
-1.0209
to
-0-6806
-0.3403
-3-4030
0+
-1.36/2
-0.6806
-1-36/2
1-36/2
+to
0.6806
++0-34-03
0-6806
+-0.3403
K
+2.7225
to
+2.7225
+2.0418
io
*1-3612
+0.6806
3
+2.7225
0+
to
to
+2.722S
-0-6806
0+
-1.3612
0.6806
+Z
-4.2*36
to
0+
-*.2*36
I
4.2*36
+to
to
+*.2*36
1
pds
pdk
pdd
pcs
pck
pcd
pcc
pbs
pbk
pbd
pbc
pbb
pas
pak
pad
pac
pab
paa
NS
Equ.
normales
équations
des
coefficients
des
Formation
SYSTEME
eme
2

- 70
2 eme SYSTEME
Equations normales
ÏA *A $B V\bTerme
connu z:
+ 13-0311 to - 6.IQ70 ÎO ÎO + 6.924/
+ 8.1676 to -2.7224 to + S-4-452
+ 13.0311 to î o + 6.9241
+ 8.1676 ÎO +5.4452
2 eme SYSTEME
Calcul des poids des coordonnées
2
3
4
mz
+ 0.0983
ÎO
+ 0.046/
ÎO
3
ÎO
+ 0.1378
ÎO
+ 0.0459
ÎO
to
ÎO
ÎO
4
+ 0.0460
ÎO
+ 0.0983
ÎO
ÎO
+ 0
ÎO
ÎO
+ 0.02/6
to
+ 0.046/
to
t 0
+0.0459
to
+ 0./377
ÎO
ÎO
to
ÎO
ÎO
+ 0.0153
ÎO
+ 0.O459
ÎO
ÎO
to
ÎO
+ O
+ 0.0+59
to
+ 0.1377
+ 0.0460
ÎO
+ 0.0983
to
ÎO
+ 0.1225
ÎO
to
+ 0.0 767
t 0
ÎO
ÎO

C£3
M=
(A)
M-
0.84/
î
0.7078
fr
ile
dans
obtenu
celui
avet
arer
comp
à't
0.04/6
0-2/50
0-3333
0./I79
Système
Résulte
0-07S7
-
0-5493
*
0-1377
*-/.OOOO
ÎO
ÎO
0.0459
*-0-3333
io
to
1.0000
-
7.2601
*
ÎO
to
-1.0000
7.2602
*
ÎO
0-5499
*
ioo
i
io
to
io
-I.OOOO
ÎO
to0
î
0t
to
0.3333
-
to
ÎO
to
to
io
to
to
1.8149
*
to452
4S.
*
to
to
to0
t
to
-0.9074
to
8-1676
+
0.14-54
*
47B9
1.
-
io
to
0.09B3
*
I.OOOO
-
0tÎO
0.0460
*-0.4686
/.OOOO
-
10.1687
*
to
to
to
to
1.0000
-
10.1694
*
to
0.5811
*
2.06
-
to
ioo
i
to
oi
I.OOOO
-
ÎO
ÎO
ÎO
to
-0-4666
0t
Ot
3.2446
*
6.924/
*
ÎO
io
ÎO
to
ÎO0
t
0t
2.8617
-
0311
13.
*
-O.202O
/.6S
*
0tto
0tto
0-/225
*
OOOO
/.
-
0tto
-0.6667
52
44
S.
*
io
to
0.3333
*-2.7224
ÎO
to
1.0000
-
8-/676
*
ÎO
/-65
*
to
to
to
to
to
OOOO
t.
-
ÎO
ÎO
to
5-4452
*
ot
oi
to
-2.7224
0t
0t
to
8.1676
*
O.09S/
-
1.24
*
to0
t
ot
ot
to0
t
767
0.0
*
OOOO
/.
-
0.53/3
-
6.924/
*
oi
ot
to0
t
0.4686
*
6.1070
-
to0
t
OOOO
/.
-
03//
13.
+
ou
BV
$B
VA
tA
Xconnu
Terme
BV
BH
arj
4a
inconnues
des
fonction
une
dResolution
ai
équations
des
Résolution
normales
équations
des
Resolution
poids
/x
GAUSS
DE
ALGORITHME
SYSTEME
eme
2

-72-
Co .paraison des résultats des compensations des deux systèmes.
Remarque importante:Dans ce problème théorique, les figures se ferment géométriquement et
leur solution est univoque. Nous n'avons donc pas d'erreurs de fermeture,partant, les termes connus de nos équations se «réduisent à ± 0. Les incon¬
nues $A ,yA , $£ , v* y is, tWs, y $s, t Vst sont donc nulles mais leur précisionpeut toutefois être déterminée grâce à la résolution par l'algorithme de
Gauss des équations à coefficients constants.
Le problème étant déterminé univoquement la valeur de l'erreur moyenne
quadratique de l'unité de poids est fixée arbitrairement égale à 1,
l*rsrSTEME Berne SYSTEMEDiffèrene e
en %
Erreurs moyennes
quadratiques
des coordonnées
du point A
P$r]=+ 0.0903
mç = t O.JOOS
m- + O.09B3
ç = £ O.J/JS
m- + O.I37S m- + O.I378
mv tz £ 0.3708 ">VAS £ 0.3712
Mêmes erreurs sur le point B
Erreurs moyenne
quadratiquede l'angle vo
_
M'w= +Q.622S
MU)S * 0.789
M*(ÂJ*+0.7078
M^m* 0.841
4.3
o.t%
6.6
L'analyse des résultats de l'exemple ci-dessus nous permet de conclure
en faveur de l'utilisation des liaisons indirectes en triangulation puisqueLes erreurs moyennes quadratiques sur les coordonnées et sur les fonctions
de celles-ci n'en seront affectées que très faiblenent, tout au moins t>cur
des cas voisins de celui que'nous avons étudié.
Ceci confirme également que la forme -que nous préconisons pour" le réseau
auxiliaire A S;B S*.( soit un losange allongé dont l'axe S/ S* ne serait pas
supérieur à la moitié de l'axe AB.) est acceptable.

"<«..p<p
p*h.
1
1
lessontquellesd'étudierimportantestiletsévèreestL'exigencecalculée.partied'uneetobservéepartieunedcomposéhybride,
angled'unpoidsleavecd'égalerproposesel'onquesimpleanglel'unpoidslereprésenteHimposé.estéquationcettedemembrepremierLe
(IV.3.4.)-pJTpir-p*>ff*
bienou
.37.3.3.;P«7,y
=Pc„.
*
PyPm„S/__
/
//
serapoidsdesL'équation
**consécutives.principalesdirectionsdesparformés**>,>•anglesdes/»••poidslesqueespècemêmedesoitcomposéanglecetde
poidslequeveutoncarimposée,est">6Bl'angledemoyenneL'erreurprincipal•réseau
dudirectionsdesuneetfictivedirectionlaparformél'angleàimposéemoyennel'erreurquepetitesplusl'autreetl'uneêtredevrontcordement
rac¬del'angledeetimplicitel'angledemoyenneserreurslesqueclair
estilpositifs,tousétantéquationdernièreceti-edetermesLes
vIV.3.2.)M2<r6S*M'PM'CU6B=
erreurs,despropagationdeloilasuivantet
(IV.3.1.)^os,*^=W6B
doncauronsNous
3)<(figuretotall'angledepoidsleobtiendronsncuscomposantes,despoids
lescombinantEnprincipal.réseaududirectionsdesuneetABfictivetion
direc¬laparforméexemple)notredans(UJegtotall'anglealorsobtenons
Nom,).crBS>etç»exemple(paradjacentraccordementdel'angleetimplicite
angleUncombinantenferaseraccordementlegénérale,façonD'une
mêmes»lesêtredevrontpoidsleursquec'est-à-direprincipale;stationla
deissusanglesoudirectionsautreslesquepropriétésmêmesdesJouissent
formésainsiangleslesoudirectionslesquevoulonsnouseffet,En
supplémentaire.conditionunefixéavons
noushomogène",systèmeunainsiformantobservées,directementliaisons
desl'ensembleàharmonieusements'incorporerdoiventfictivesliaisons
"lesqueI.l)(paragraphel'introductiondansdisantenMsisdirectement.
observéssontraccordementdeangleslesqueetimplicitesanglesdespoids
leconnaissonsnouspuisquerésoluestproblèmenotreprincipe,En
raccordement.ledansutilisésncnimplicitesanglesles
sursimultanémentobtenueprécisionlacomplètementignoreraOnd'obtenir.
l'intentional'onqueraccordementdeangleslessurs'appuierontquiimplicitesanglesdesceuxsurprécisiondemaximumleobtenirà"1façonde
observésanglesdespoidslesetfigureladeformeladoncfixeraOnvés.
obser¬sont°7yraccordementdeanglesplusieursousuivant.qu'unprésentersepeuventraccordementdecasplusieursqueimmédiatementvoyonsNous
B).(ouAdeissuestions
direc¬desl'ensembleas'intégrerAB'rmissefictivedirectionlaquepour
connusoit)c-C52,c>/6(ou^}lC,<%S/anglesdesl'unquesuffiraH
2»)(page3figurelaReprenons
'RACCORDEMENTDUPRINCIPE.3ET.
-73-

-7A-
conditions les plus éconoràques pour la satisfaire.
En exaninant le second netnbre de l'équation (IV.3.A. ), nous reiiarquons
iior.édiaterient que pour une valeur const\nte du dénominateur un maximum sera
atteint lorsque
pf = p%Sl (IY.3.5.)
Un introùrisant cette condition, cherchons Maintenant pour quelles va¬
leurs non nulles des coiinosantes, exprimées en fonction de Pou,-.- notre équa¬tion (IV.3.4-») sera satisfaite.
Nous aiirons alors
ou bien
soit, en résolvant
Pw!i =
TT~ (ÎV.3.6.)
P'?- * Pus- Py=0 (1V.3.7.)
Pv = * Pc*>;j (1V.3.8.)
Il faudra donc, pour une solution économique de cette partie du pro¬
blème, que 1'ancle implicite et 1 on; le qui le racccrde au réseau principalaient chacun un poids double du poids obtenu pour les angles simples de la
station.
Il va sans dire que d'autres solutions sont possibles pourvu que l'é¬
quation (1V.3.2.) soit cvticfajtc. 2n particulier, lorsque la forme du
réseau auxiliaire sera avantageuse, en aura facilement
P? > P^sj (IV. 3.9.)
On pourra alors réduire la précision de l'angle de raccordement en con¬
séquence.Dans le cas d'un réseau auxiliaire défavorable, il sera indiqué d'ouç-
nenter to\it d'abord les poids Poe , Poe tPf , Pp, en répétant les observations
jusqu'à ce quepp soit au moins égal a pw^- .
Dans certains autres cas, il ce pourra que Z, ou S2 oii Keme les deux
soient des stations du réseau principal. 11 est évident que le raccorderont
sera alors automatique, sans 1 interiat-diaire d'un ancle c-. H faudra alors
que
p9> = P^> (IV.3.U.)

- 75 -
ET. 5-DIFFERENTS ASPECTS DU RACCORDEMENT
A. Avec observation des angles 0 = <p * y» et $ = tp + $>
Lorsque nous avons traité la façon d'établir les poids des angles
implicites, nous sommes partis d'un réseau auxiliaire dont les seuls élé¬ments observés sont les angles «
,«"
, p et j3' des stations auxiliaires.
Cependant, cornue ncus l'avons mentionné au paragraphe II.2., les vi¬
sées des stations auxiliaires aux stations principales étant possibles, 12
est évident que les mêmes visées sont également possibles dans l'autre sens,
excepté dans le cas de stations principales inaccessibles. (Nous traiterons
ce cas exceptionnel au cours du chapitre V).Puisque les stations auxiliaires sont visibles des stations princi¬
pales, il est naturel de penser que l'observateur sera tenté de les inclure
dans son programme. Dans ce cas, notre réseau auxiliaire sera composé- de
deux triangles indépendants, dont nous connaissons les trois angles oc, <*;/pour le triangle I etfi,/f/Çrpovac le triangle II (figure 5/ page 11),
Nous aurons alors des observations surabondantes et le réseau auxili¬aire devra être compensé avant d'en utiliser les éléments pour le problèmequi nous intéresse (voir paragraphe IV.l.).
Nous verrons plus loin de quelle façon les poids des angles respectifspeuvent être fixés mais admettons pour le moment que les angles «, or; f du
triangle I (figure 5) soient connus et que leurs poids soient égaux à l'uni¬té. (Discussion analogue pour le triangle II)..
Apres la compensation, le poids de chreun des angles sera
Poe = Poe' » Pf « -|- (17.4.1.)
Cette propriété est extrêmement intéressante, car elle nous permettrad'augmenter la précision des angles imnlicites d'vne façon relativement éco¬nomique et, dans certains cas, d'obtenir la valeur particulièrement remarqua¬ble de
P9 s P(p. = /y s py. s z (17.^.2.)
pour des angles observés de poids
Poe = Poe'= P/i = P/3' = / (17.4.3.)
En effet, le cas particulier No. 1.2. développé au paragraphe III.4.nous offre un champ relativement étendu dans lequel on peut faire varier laposition relative de S, et S* sans altérer sensiblement la valeur de
"V = u*r= M'y = m's" -j- (17.4.4.)
pour des poids
Poe » Poe = P/s = P/3' = t (17.4.3.)
Si on compense le réseau auxiliaire conformément à ce qui a été dit
précédemment, nous aurons après cette première phase
m*ec * m*ec' mVs m*fi" j-(17.4.5.)

-76-
qui, introduits dans notre système d'équations (II.3«35.-II.3.38) en les
mettant en facteur commun, nous donneront
Donc
fi? - P9. = P? = Pr= 2 (IV.A.2.)
C.q.f.d.
B. Avec différentes méthodes d'observations azimutales.
IIoùs avons à notre disposition une variété de méthodes d'observationsazimutales qui sont couramment utilisées en triangulation. Chacune d'elles
présente des particularités non seulement dans l'observation, mais aussi
dans la compensation des résultats. Il conviendra donc d'incorporer les liai¬
sons indirectes suivant une technique adaptée à chacune des méthodes (voirparagraphe IV.5.).
C. Discrimination de cas généraux de raccordement.
Dès l'instant où l'on décide une liaison indirecte, celle-ci peut pren¬dre place dans l'une des trois catégories suivantes:
Catégorie I: La liaison indirecte entre A et B est décidée d'emblée, ou justeaprès la reconnaissance, mais avant de fixer le programme des
observations en A et B. On pourra alors incorporer l'observa¬
tion des angles de raccordement à ce progr >tjr.e.
Catégorie II:La liaison indirecte entre A et B est jugée nécessaire aprèsterminaison des observations principales en'A et B nais avant
que les calculs soient arrêtés. Il faudra alors adapter les
observations de raccordement aux observations principales et
procéder a un-balancement de station.
Catégorie ~EL' Les stations A et B cnt déjà fait l'objet d'un calcul définitifde compensation dont les résultats ont peut-être déjà été pu¬bliés ou utilisés pour d'autres travaux. Ils ne peuvent plusêtre changés. Les angles de racci rdenent devront être adaptésà ces résultats par un ajustement de station.
Ce cas entrera parement en ligne de compte, puisqu'il impliqueque le réseau principal est déjà fixé définitivement. Il pourra
cependant se présenter si:
1) on veut connaître la précision d'une diagonale de quadrila¬tère.
2) une des stations principale n'est pas encore fixée définiti¬vement.
Si les calculs de compensation du réseau principal doivent être
refaits complètement, ce sera un cas entrant dans la catégorie II.

- 77 -
IZ. 5. INCORPORATION DE LA DIRECTION FICTIVE
AUX AUTRES DIRECTIONS D'UNE STATION.
A. Méthode des séries ou tours d'horizon»
Il est bien connu que, lorsqu'une station est observée par cette métho¬
de, toutes les directions qui en s'ont issues ont le même poids et tout angleformé par une direction avec une autre direction quelconque de la série aura
un poids d'une valeur égale à la moitié de celui d'une direction.
Etudions maintenant les différents cas qui peuvent se présenter lors¬
qu'on utilise cette méthode dans 'les catégories définies au paragraphe I7.4»C.
Catégorie I.
a) L observation des deux directions de raccordement est inclue dans le
programme de la station principale»Ôe cas est très simple» Reportons-nous à la figure 36.
°^<:
s,
s,
FIGURE 36

-78 -
En adoptant comme unité de poids "celui de l'angle formé par deux direc¬
tions au cours d'une série homogène comprenant la totalité du tour d'horizon,les directions principales auront le poids 2. La direction fictive pourraêtre considérée comme le résultat des combinaisons suivantes:
1) Angle formé par la direction S; et l'inconnue d'orientation 0,augmenté de l'angle implicite <p d'une part et
2) angle formé par la direction S* et l'inconnue d'orientation C,diminué de l'angle </>' d'autre part.
Puisque les angles o/»s, et oas2 ont par convention le poids 1 (pour une
série), nous aurons
M*0B = M'0Si + M*?* 1 + M*v (IV.5.1.)
et
M'off » M*0Ss:+ M*?,* f*Mzv, (IV.5.2.)
Si nous nous arrangeons de façon qrie
M2p = M'y = 1 (IV. 5.3»)
nous aurons obtenu peur l'angle OAB dcujc valeurs affectées chacune du poids
Pob - ^ (IV.5.A.)
et leur moyenne arithmétique aura le poids
Pob = I (IV.5.5.)
Ilous aurons ainsi rétabli l'équilibre et la direction fictive AB se
trouve incorporée d'une façon homogène à l'ensemble des autres directions de
la série.Il faut remarquer ici que l'angle (fi*?*?' est aussi observé et que nous
en tirerons avantage pour la détermination des- poids pv et Py (veir paragra¬
phes IV.1. et IV.3.A.). Le chapitre III nous indique différentes manières
d'obtenir un poids unitaire pour les angles implicites. îlous n'y reviendrons
pas, nais mentionnons le cas particulier ilo. 1.2. dont les avantages sont
certains.
b) Une seule des directions de raccordement est inclue dans le programmed'observation.
Ce cas pourrait se rapporter au précédent, si l'on pouvait d'embléedonner le poids 2 à l'angle oas, (ou eAsg ), tandis que les autres anglesprincipaux seraient toujeurs affectés du poids 1.
Le principe même de la méthode ne l'autorise pas.Si l'on observe par la méthode des séries, il est donc essentiel que
les deux directions auxiliaires soient inclues dans le programme.

-79 -
Catégorie II.
Les 'séries d'observations des directions principales issues de la sta¬
tion A. sont terminées, mais leur compensation n est pas encore arrêtéedéfinitivement lorsque la liaison indirecte AB est jugée nécessaire.
Ce cas peut se rapporter à celui de la compensation de séries d'obser¬vations incomplètes traitée par différents auteurs. Mous renvoyons ici âJordan qui indique une méthode approchée (cf.[5]livre 1, pages 206-210"Genâhrte Berechnuiig unvollstahdiger Richtungssatze") et la méthode rigou¬reuse de Bessel (cf. [5]Livre 1, pages 315-320, "Strenge Ausgleichung unvoB.-
stahdiger Richtungssatzen (Bessels Méthode)).Les séries' d'observations seront alors de deux classes:
1) celles qui ne contiennent que les directions-principales
2) celles qui contiennent les directions auxiliaires.
Cette dernière -classe sera traitée de la même façon que les cas de ca¬
tégorie I étudiés dans ce même paragraphe.
Catégorie III.
La station A est une station ancienne et les directions qui en sont
issues ont été fixées définitivement,
H s'agira d'adapter notre raccordement par un ajustement forcé.
La méthode des séries ou tours d'horizon ne se prête pas facilement àcela. Comme les observations anciennes n'ont pas d'importance puisque les
résultats de leur compensation sont connus et ne doivent plus être changés,nous pourrons raccorder notre réseau auxiliaire par une autre méthode plussimple sans pour cela altérer les résultats finaux sur l'ensemble de la
station.(Voir plus loin sous lettre C).
B. Méthode des couples sur référence.
(cf. [8]Fascicule I paragraphe 90, p. 152-153 et [7] Fascicule I paragra¬
phe 49, p. 108-109}.Cette méthode présente l'avantage d'être extrêmement souple bien que le
nombre des observations soit plus élevé que dans n'importe quelle autre mé¬thode.
En particulier, elle permet d'augmenter le nombre des observations de
n* importe quelle direction.
En utilisant cette propriété, il nous sera dès lors facile d'obtenir quel'angle de raccordement et l'angle iiaplicite se combinent en donnant .un poidsrésultant égal au poids des observations des directions principales.
En d'autres termes, il nous sera aisé, par une répétition appropriéedes mesures sur la direction AS/ (ou AS*), de satisfaire l'équatior
M'^ = M'a- * M'y (IV.5.6.)
Cette méthode est facilement applicable dans les cas suivants:
1) quand les poids des angles implicites sont différents les uns des
autres
2) quand les poids aes angles implicites se présentent sous une forro •
fractionnaire.

- 80 -
L'observation par cette méthode pouvant être faite indépendamment pourchacune des directions^ nous voyons qu'elle couvre aussi bien les cas quise présentent dans les catégories I et II définies au paragraphe IV-4.G.
Nous remarquons aussi qu'il n'est pas nécessaire de connaître les deux
directions de raccordement AS/ et AS*. Une seule suffira et il est évident
que nous utiliserons cel^e dont l'angle implicite adjacent est plus précis.Cette propriété intéressante cet valable pour toutes les néthcdos qui
nous permettront de mesurer des angles par opposition aux mesures de direc¬
tions mentionnées par exemple au paragraphe IV»5«A.
En effet, d'une façon générale, l'angle formé par une direction prin¬cipale (ou la direction de référence) et la direction fictive AB peut tou¬
jours se déterminer de deux façons (voir figure 37).
FIGURE 37 \S*
Il sera égal a
1) l'angle formé par la direction principale (ou la direction de réfé¬
rence) et la direction auxiliaire AS/,
augmenté de l'angle implicite V
ou bien
2) l'angle formé par la direction principale (ou la direction de réfé¬
rence) et la direction auxiliaire AS*,
diminué de l'angle implicite ?>'•
lîous choisirons évidemment la rianière qui nous permettra de satisfaire
lo plus facilement l'équation (IV.5.6.). Remarquons encore qu'une combinai¬
son des deux manières ce raccordement peut être avantageuse pour une solu¬
tion économique du problème, d'autant plus qu'à ce moment, nous connaîtrons
également l'angle 0= ç> + y ce qui nous permettra d'augmenter de 20$ environ
la précision des angles oc, oc;p, fi' (voir paragraphe IV.U»A.).

81 -
Les cas se rapportant à la catégorie III ne dépendent pas de la mét'ho-
de utilisée antérieurement (voir paragraphe IV.5.A.). Us peuvent facilement
être résolus ^ar cette méthode, mais comme nous les traiterons en détail au
paragraphe suivant,
C. Méthode par mesure diucte des angles (Schreiber).
Cette méthode est extrêmement utilisée en triangulation et nous nous
référons ici à Jordan (cf.[5] Livre I, pages 329-337, paragraphe 86 "Winkel-
messung in allen Kombinaticnen" et Tardi (cf. [8]pages 153-155).Cette méthode également présente une souplesse intéressante pour l'in¬
corporation de la liaison indirecte AB à l'ensemble des observations de la
station A. En effet, s'agissant d'angles, les mêmes remarques qu'au para¬
graphe précédent sont valables quant à la combinaison des angles de raccor¬
dement et des angles implicites qui leur correspondent.Les cas couverts par les catégories I et II se traitent de la même fa¬
çon qu'avec la méthode des couples sur référence (IV.5.B.).Nous étudierons ici la façon d'incorporer une liaison indirecte aux
résultats de la compensation d'une station ancienne, c'est-a-dire tous les
cas qui se présentent sous la catégorie III (voir paragraphe IV.4.C.).Il s'agira d'un ajustement forcé que nous traiterons par la méthode in¬
diquée par Jordan (cf.[5]Livre I, paragraphe 87, pages 337-339 "Winkclmes-
sung in allen Kombinationen mit Anschlusszvrang").Dans ce cas, nous rattacherons notre réseau auxiliaire à deux direc¬
tions principales dont les valeurs sont fixées définitivement et inchangea-bles.
Selon les règles énoncées par le Général Schreiber, ces deux directions
FIGURE 38

- 82 -
fixes peuvent être considérées comme une seule et cliaque nouvelle direction
observée doit être rattachée aussi bien a l'une qu'à l'autre (figure 3B),Nous fixerons tout d'abord la position des detsx directions auxiliaires
AS/ et ASi par la méthode a laquelle nous nous référons sans nous occuper
potir le moment des angles implicites </> et (/>'. La solution du rattachèrent
de deux directions nouvelles étant donnée en détail par notre référence,nous ne nous y attarderons pas. Mentionnons simplement deux particularitésqui nous intéressent: (voir figure 39).
B
FIGURE 39
1) L'angle GAC formé par les deux directions anciennes ne doit pas être
mesuré.
2) L'angle S, AS* formé par les doux directions nouvelles doit avoir un
poids double d" celui des autres angles observés GAS,, GAS*, S/AC
et S/AC, c'est-à-dire qu'il faudra doubler le nombre des observations
de l'angle compris entre les deux directions auxiliaires. Cette con¬
dition est extrêmement favorable à la détermination des angles im¬
plicites puisque, selon notre paragraphe IV.A.C, la précision des
angles o( , ef' , /S et /3' s'en trouvera automatiquement renforcée.
Fassons à la deuxième partie du problème:
Il s'agit maintenant d'étudier quels poids il faudra donner aux obser¬
vations en A et aux angles implicites pour que les angles formés par les di¬
rections principales et la direction fictive soient de même poids que nous
fixerons
'GB« Pbc <* 1 (IV.5.7.)
puisque
-=£T GAB - -=£T GAS, + 9 (IV.5.8.)

- 83 -
il faudra que
M'es = M'es, + M*? (IV.5.9.)De même pour
^C BAC = <P'+ -<" S, AC (17.5.10.)et nous aurons
M'bc = ^V * ^*J,c (IV.5.11.)
et, en appliquant notre condition (IV.5.A.)
M*GB = A/'flc = M'GSf y. A/'ç, = M'y, + M*s2c* i (IV.5.12.)
mais, en vertu du développement exposé au paragraphe IV.3.J il est avanta¬
geux que l'angle de raccordement ait un poids égal à celui de l'angle im¬
plicite adjacent.Donc, la solution économique sera de faire
M'es, = M*? = M*r = M*Szc= -L (17.5.13.)
c'est-à-dire donner des poids 2 aux angles implicites et aux angles de rac¬
cordement. (Nous renvoyons ici au paragraphe IV.4.A., qui traite ce problè¬me en détail).
Les angles de raccordement étant les angles observés GAS,et S^AC de
notre figure 39* nous connaissons maintenant tous les éléments pour remplirla condition 2)*citée plus haut.
Pour résumer, faisons un tableau des angles qu'il faut observer sur la
station -ancienne et indiquons quels poids il faut leur affecter pour que fi¬
nalement nous obtenions la condition (IV.5.7.).
Angles observés poids
GAS, 2
GAS* 2
GAC 0 ne doit pas être observé
S,AS2 A
S,AC 2
S2AC 2
En nous arrangeant de façon que <p et tp' reçoivent également un poids 2,nous obtiendrons ainsi une intégration harmonieuse c!g l-i direction fictive
aux directions compensées de la station ancienne,
D. Méthode des secteurs.
Cette méthode est très utilisée en Suisse et nous renvoyons pour les
détails aux publications du Prof. Baeschlin (cf.[3]et [A]).Comme il s'agit de l'observation d'angles simples, il suffira de com¬
biner les angles implicites et les angles de raccordement de la façon indi¬
quée sous lettres B et C de façon à satisfaire l'équationr

-84-
Mlu..° "V * M> (IV.5.14.)u
T
'Nous n'y reviendrons pas.
Renr.rquonr> cependant qu'il sera convenable de choisir 1er, côtés du
secteur' colù:c directions fixes auxquelles en rattacher; In réseau auxiliaire.Un cas particulier peut se- présenter oîi les dirccôicns auxiliaires AS/
et ASi fent partie de- deux secteurs différents. Ce cas est assez rare pour*les raisons suivantes:
1) peur une solution aventureuse du problèno de liaison indirecte, nciic
avons vu que les statienr auxiliaires doivent être de part et d'au¬tre eu sur la liene AB et
2) si la virée A3 est ir.poscible, il est fort prcbablo que notis n'ayonspas une directien principale du réseau voisine de la li^ne Al5., au¬
quel cas il ne serait £ut:re sensé d'introduire une liaison indirecte.
Cependant, théoriqueneni, ce cas peut se présenter et en peut r.e deman¬
der de quelle façon le résoudre.le réseau auxiliaire for:>ani un tout, il no nous parait pas inciqué de
compenser l'une des directions auxiliaires dans un secteur et l'autre dons
le secteur voisin. Nous pensons qu'il est convenable de corr.pc nscr les deux
directions auxiliaires dans le secteiu* conprenant la direexien fictive AB,c'ect-a-dire de rattacher aur-j bien la direction extérieure que la direc¬
tion intérieure auj: deux côtes du u'êne secteur.

-85 -
CHAPITRE Y
Conclusions et applications
Y. 1.RECAPITULATION
Lorfoqu'un problème de liaison indirecte se présente, il faut:
Premièrement. Faire une reconnaissance des possibilités d'introductiondu réseau auxiliaire en essayant de se rapprocher le plus possible du cas
Ho. 1.2.) développé du paragraphe III.4-. Ce cas est le plus favorable pourla détermination simultanée des poids des quatre angles implicites.
Si les conditions locales ne permettent pas de s'y tenir, on'étudierad'autres possibilités, dont un certain nombre ont été discutées au chapitreIII. On étudiera, en particulier, celle de scinder le problème en deux et de
fixer la position des stations auxiliaires de deux réseaux différents, l'unétant favorable a l'intégration de la liaison indirecte en A et l'autre en B.
Deuxièmement. La position approximative des stations S, et S« étant ar-
rêtée, étudier la force du réseau auxiliaire relative aux poids des anglesimplicites, en calculant ces derniers -a l'aide de la méthode géométriquedéveloppée au paragraphe II.3.
Troisièmement. Etudier les conditions requises par les stations prin¬cipales; c'est-à-dire qu'il faudra savoir:
a) quel est le poids des observations principales sur A et B respecti¬vement
b) quelles sont les méthodes d'observations azimutales utilisées sur
A et B respectivement
c) dans quelle catégorie générale de raccordement définie au paragrapheIV.4.G. se rangent les stations principales A et B respectivement.
Quatrièmement. Etablir le programme d'observation sur les stations prin¬cipales et auxiliaires en notant soigneusement l'ordre dans lequel les ob¬
servations doivent se faire et leur poids, c'est-à-dire que le nombre des
observations doit être fixé d'avance.Le choix de la méthode d'observation à utiliser sur les stations auxi¬
liaires est indépendant des méthodes utilisées en A et B, mais, pour une
corrélation aisée des poids, nous suggérons la méthode des couples sur réfé¬rence. En effet, sa grande souplesse nous permettra de l'adapter facilementà notre problème pour obtenir des poids différents pour les observations des
angles oc ,oc
, /3 et /3' • Cette qualité est particulièrement appréciable,lorsque la figure auxiliaire se présente sous une forme peu orthodoxe et
pour renforcer les poids des angles implicites qui le nécessitent.Les observations terminées, un calcul préliminaire qui peut se faire
rapidement par une des deux méthodes indiquées au chapitre II renseignerasur la qualité des résultats obtenus et, le cas échéant, on pourra facile¬ment remédier à une déficience en augmentant le nombre des observations sur
l'une ou l'autre des stations.

- 86 -
Y. 2 APPLICATIONS
A. Résolution de problc-ner» sir/dl aires
a celui présenté au paragraphe 1.2.
C'est l'objet de cette thèse. On trouve un résuné de la inarchc à suivre
au paragraphe IV.1.
On peut appliquer également cette méthode a la recherche des poidsd'angles inplicites des problèmes suivants déjà connus.
B. Ilesure d'un angle en un point inaccessible.
La figure 40 nous montre claireixut la marche à suivre:
1) établir deux réseauxauxiliaires dont vue des stations est commune»
2) l'angle cherche C/J3 est- la ccr^ e des ongles implicites p, du réseau I
et fj' du réseau. II que neus connaîtrons avec leur peids en résolvant
le problenc par les méthodes développées au chapitre II.
3) aucun raccordaient n'est nécessaire.
c
U-^t-Vé^ «<1^?>
* ^-LS /— 1 — ^=r==*~ b
If/, ,
s*
FIGURE 40
C. Ifesure d'une s bâti en excentrique à partir d'une autre station
excentrique.
La figure 20 et le cas lie. 3.4. étudié au paragraphe III.A. nous indi¬
quent la r^.rchc à cuivre et la position optira (page 37).
D. Passage d'une crête inaccessible par une chaîne- de quadrilatères.
La ri;^ure 41 noirs nontre le principe. C'est une extension du cas exposésous V.2.B, or les stations A et B sent co~:runes aux deux figures ax;xiliaires.

- 87 -
FIGURE 41
Bien que peu favorable au point de vue précision, puisque:
1) les "signaux" A et B seront assez mal définis et probablenent dif¬
ficiles a identifier de part et d'autre de l'obstacle
2) la forme des figures est désavantageuse (voir paragraphe III.7»)
ce cas peut 'cependant présenter quelque intérêt en exploration.
Ch. A. Perret
Zurich, août 1958.

- 83 -
BIBLIOGRAPHIE
[il Bachmann,. Dr. W.K.
[2] Bachmann,Dr. W.K.
[3] Baeschlin,Prof. Dr. Ing.e.h.C.F.
[4] Baeschlin,Prof. Dr. Ing.e.h.C.F.
[5j Jordan,Dr. Phil.h.c. U.
[ô] Koll,Prof. 0.
[Y] Heignier,Ing. F.
[s] Tardi
Capt. P.
M Tienstra,?rof. J.K.
Etudes bur la photogramnétrie aérienne
(S.A. de Vente des Instruments de GéodésieH. flild, Heerbrugg, 1946)
Calcul symbolique des coefficients de
poids et de corrélation des inconnues
dans le cas d'observations Médiates ou
conditionnelles.
(Tiré à part du Bulletin Teclinique de la
Suisse Romande, Lausanne, 1950)
Ausgleichungsrecïinung und Landesvermessung
(Akadciâischer Kultxir-Ingenieurverein an
der H.T.U. Zurich, 1936)
Der ïheodolit
(5» Auflage, Buchdruckerei Fluntern,Zurich, 1945)
Handbuch der Veruescungslcunde
($. erweiterte Auflage bearbëitet von
Dr. Ing.e.h. 0. Eggert.•J.B. iletzlcrsche VerlagsbudihandlungStuttgart, 1935)
Méthode der 2<leinsten Quadrate
(2. Auflage, Verlag von Julius Springer,Bt-rlin, 1901)
Ccm*s de Géodésie pratique
(2e:ne Edition, Institut Géographiquenational, Paris, 1949)
Traité" de Géodésie
(Gauthier-Villars, Paris, 1934)
Theory of the adjustnent of non<iallydistributed observations
(N.V. Uitgeverij ARGUS, Amsterdam, 1956)

CURRICULUM VITAE
Né le 15 octobre 1915 à la Chaux-de-Fonds, j'ai fréquenté les Ecoles de
cette ville jusqu'au moment où, après avoir passé mon Certificat de Ma¬
turité, je suis entré à l'Ecole Polytechnique Fédérale de Zurich en au¬
tomne 1934.
Inscrit dans la section de Géodésie (Section VIIIB), mes études ont été
interrompues à plusieurs reprises par le service militaire et je devais me
présenter aux examens finaux en automne 1939. La mobilisation de
guerre m'en a empêché et ce n'est qu'en juillet 1941 que j'ai reçu le
Diplôme d'ingénieur topographe de l'Ecole Polytechnique Fédérale.
Après avoir pratiqué ma profession dans divers services de l'Armée,j'ai eu le privilège de retourner à l'E. P. F. comme assistant de M. le Prof.
Dr. h. c. C. F. Baeschlin.
En 1945, je joignais le Département d'exploration du Groupe RoyalDutch/Shell et partais pour l'Amérique du Sud en qualité d'ingénieurtopographe, pour la prospection du pétrole.En 1949, lors de mon premier passage en Suisse, M. le Professeur F. Ko-
bold me suggérait ce sujet de thèse. A peine en avais-je commencé l'étude,que plusieurs transferts successifs et différents voyages dans toutes les
parties du monde ont considérablement ralenti mon élan. Toutefois,pendant mes longs séjours aussi bien dans la brousse équatoriale que
dans les sables du Sahara, ce travail a agréablement rempli les heures
de mes soirées de solitude. Ce n'est cependant que dès r956, qu'uneoccupation professionnelle plus sédentaire dans un milieu plus confor¬
table me donnait le loisir de terminer cette thèse.





























