Embed Size (px)
Citation preview

A 3cell =
− 1Rccc
1Rccc
0 0 0 01
Rccs−( 1
Rccs+ 1
Rucs+ 1
Rcccs) 0 1
Rcccs0 0
0 0 − 1Rccc
1Rccc
0 00 1
Ru2c f cs
+ 1Rcccs
1Rccs
−( 1Rucs
+ 1Rccs
+ 2Rcccs
) 0 1Rcccs
0 0 0 0 − 1Rccc
1Rccc
0 1R2
uc f cs(1− 1
Ruc f) 0 1
Ru2c f cs
+ 1Rcccs
1Rccc
−( 1Rccs
+ 1Rucs
+ 1Rcccs
).
(20)
Figure 11. OBSERVABILITY OF THE SAME SENSOR LOCATIONSUNDER DIFFERENT CONDITIONS
Table 3. NUMBER OF SENSOR POSITION COMBINATIONS GIVINGFULL OBSERVABILITY FOR A STRING WITH 12 CELLS AND 4 SEN-SORS
Conditions No. of combinations
giving full observability
Full interconnection 106/495
Natural convection 52/495
No cell to cell conduction 1/495
ditions under different scenarios, and the conclusion is summa-rized in Table 3. The minimum number of sensors that gives fullobservability is 4.
As shown in Table 3, among all the 495 combinations of4 sensor locations in a cell string of 12, if there is both circu-lated coolant convection and cell to cell conduction, referred toas full interconnection in Table 3, 106 combinations will givefull observability. Under natural convection, where the coolantis not flowing between cells, only 52 combinations can satisfy
full observability condition. When the cell to cell conduction ismissing, only 1 combination yields full observability. That com-bination would be placing the sensors at the 3th, 6th, 9th and12th cells. The sensors are actually evenly distributed along thecluster, which agrees with intuition.
Of the two modeled thermal interconnections between cells,namely the cell to cell heat conduction and the heat convectionthrough the coolant flow, the former tends to have larger impacton the observability of the pack model. This may be related tothe fact that the cell to cell heat conduction is a two-way inter-action, where the two adjacent cells can transfer heat betweeneach other. But the heat convection through the coolant flow issingle directional, and only the previous cells along the coolantflow direction will affect the latter ones.
Consequently, greater cell to cell heat conduction will be fa-vored by the observability of the pack model. It is noted thatgreat cell to cell heat conduction can also reduce the temperaturegradient between cells in the pack and thus help contain the im-balance between cells induced by temperature non-uniformity.However, on the negative side, in case of a single cell thermalfailure, e.g. local overheating, the great cell to cell heat conduc-tion will facilitate the spread of such failure to other cells in thepack. This is not desirable from the safety perspective.
8 ConclusionIn this paper, an online parameterization methodology for a
lumped thermal model of a cylindrical lithium ion battery cellhas been proposed, designed and verified by simulation. By us-ing online parameterization algorithm, the lumped parameters ofthe thermal model, which cannot be easily measured or calcu-lated otherwise, can be automatically identified based on the cur-rent excitation of a real drive cycle and the resultant battery sur-face temperatures. The identified parameters and the measuredcell surface temperature are adopted by an adaptive observer toestimate the unmeasurable core temperature of the cell. The esti-mated core temperature can be used as a more useful and criticalreference for the on-board thermal management system and eventhe vehicle power management system. The next step will be tovalidate the model and the methodology with experiments. Overthe battery lifetime, such online identification scheme can be re-set on a monthly or yearly basis to track varying parameters due
A 3cell =
− 1Rccc
1Rccc
0 0 0 01
Rccs−( 1
Rccs+ 1
Rucs+ 1
Rcccs) 0 1
Rcccs0 0
0 0 − 1Rccc
1Rccc
0 00 1
Ru2c f cs
+ 1Rcccs
1Rccs
−( 1Rucs
+ 1Rccs
+ 2Rcccs
) 0 1Rcccs
0 0 0 0 − 1Rccc
1Rccc
0 1R2
uc f cs(1− 1
Ruc f) 0 1
Ru2c f cs
+ 1Rcccs
1Rccc
−( 1Rccs
+ 1Rucs
+ 1Rcccs
).
(20)
Figure 11. OBSERVABILITY OF THE SAME SENSOR LOCATIONSUNDER DIFFERENT CONDITIONS
Table 3. NUMBER OF SENSOR POSITION COMBINATIONS GIVINGFULL OBSERVABILITY FOR A STRING WITH 12 CELLS AND 4 SEN-SORS
Conditions No. of combinations
giving full observability
Full interconnection 106/495
Natural convection 52/495
No cell to cell conduction 1/495
ditions under different scenarios, and the conclusion is summa-rized in Table 3. The minimum number of sensors that gives fullobservability is 4.
As shown in Table 3, among all the 495 combinations of4 sensor locations in a cell string of 12, if there is both circu-lated coolant convection and cell to cell conduction, referred toas full interconnection in Table 3, 106 combinations will givefull observability. Under natural convection, where the coolantis not flowing between cells, only 52 combinations can satisfy
full observability condition. When the cell to cell conduction ismissing, only 1 combination yields full observability. That com-bination would be placing the sensors at the 3th, 6th, 9th and12th cells. The sensors are actually evenly distributed along thecluster, which agrees with intuition.
Of the two modeled thermal interconnections between cells,namely the cell to cell heat conduction and the heat convectionthrough the coolant flow, the former tends to have larger impacton the observability of the pack model. This may be related tothe fact that the cell to cell heat conduction is a two-way inter-action, where the two adjacent cells can transfer heat betweeneach other. But the heat convection through the coolant flow issingle directional, and only the previous cells along the coolantflow direction will affect the latter ones.
Consequently, greater cell to cell heat conduction will be fa-vored by the observability of the pack model. It is noted thatgreat cell to cell heat conduction can also reduce the temperaturegradient between cells in the pack and thus help contain the im-balance between cells induced by temperature non-uniformity.However, on the negative side, in case of a single cell thermalfailure, e.g. local overheating, the great cell to cell heat conduc-tion will facilitate the spread of such failure to other cells in thepack. This is not desirable from the safety perspective.
8 ConclusionIn this paper, an online parameterization methodology for a
lumped thermal model of a cylindrical lithium ion battery cellhas been proposed, designed and verified by simulation. By us-ing online parameterization algorithm, the lumped parameters ofthe thermal model, which cannot be easily measured or calcu-lated otherwise, can be automatically identified based on the cur-rent excitation of a real drive cycle and the resultant battery sur-face temperatures. The identified parameters and the measuredcell surface temperature are adopted by an adaptive observer toestimate the unmeasurable core temperature of the cell. The esti-mated core temperature can be used as a more useful and criticalreference for the on-board thermal management system and eventhe vehicle power management system. The next step will be tovalidate the model and the methodology with experiments. Overthe battery lifetime, such online identification scheme can be re-set on a monthly or yearly basis to track varying parameters due
In accordance with Cooperative Agreement W56HZV-04-2-0001
U.S. Army Tank Automotive Research, Development and Engineering Center (TARDEC)
8:00 Welcome & IntroductionsProf. Anna Stefanopoulou, ARC DirectorDr. Stephen Forrest, VP for Research, University of Michigan
8:20 Plenary SessionIntroductions by Dr. David Gorsich, Chief Scientist, U.S. Army TARDECDistinguished Speakers
Dr. Grace Bochenek, Chief Technology Officer, U.S. Army Materiel CommandDr. Scott Fish, Chief Scientist, U.S. ArmyMr. Gary Rogers, President & CEO, FEV, Inc.Mr. Craig Savonen, Director, Engine Product Engineering, Daimler Trucks
Break
10:30 Case Study Presentations• Enabling Integrated Powertrain Experiments in Networked Labs• Reliability-Based Design Optimizations (I-RBDO) Code & Applications
12:00 Lunch
1:30 Technical Symposium 1 with parallel sessions1A: JP-8 Studies, IC Engines 1B: Thermal Dynamics & Hybrid Powertrains1C: Design/V&V/Reliability
3:30 Poster Session / Tour of Autolab experimental facilities
Day 1: Monday, May 21, 2012
8:00 WelcomeProf. Dawn Tilbury, ARC Deputy DirectorMr. David Thomas, Director, National Automotive Center
8:10 Plenary SessionIntroduction by Mr. David Thomas, Director, National Automotive CenterDistinguished Speaker
Dr. Arun Majumdar, Director ARPA-E, Department of EnergyPanel on “Diverging Future of Automotive Systems in Civilian and Military
Vehicle Applications”Dr. Peter Schihl, Senior Technology Expert (GVPM), U.S. Army TARDEC Mr. Kyle Kimel, President and CEO, AVL Test Systems Inc.Dr. Matthew Brusstar, Director, Advanced Powertrain Center, U.S. E.P.A.Dr. Emilio E. Bunel, Director, Chem. Sc. and Eng. Div., Argonne Natl. Lab.Prof. Huei Peng, U.S. Director, Clean Energy Research CenterDr. Matthew Reed, Head Biosciences Group, UMTRI
Break
10:00 Technical Symposium 2 with parallel sessions2A: Mobility/Terramechanics 2B: Electrified Powertrains: Design & Characterization2C: Survivability/Reliability
12:00 Lunch
1:30-3:30 Poster Session
Day 2: Tuesday, May 22, 2012
Organized by theAutomotive Research Center
A U.S. Army Center of Excellence for Modelingand Simulation of Ground Vehicles
College of Engineering
This event is free of charge. Register at
arc.engin.umich.eduInquiries
(734) [email protected]
Venue
Penny and Roe Stamps AuditoriumNorth Campus
The University of Michigan1226 Murfin Ave.
Ann Arbor, MI 48109
18th Automotive Research Center ConferenceMay 21-22, 2012 Powering Future Mobility

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
Computer Science Engineering Building / Bob and Betty Beyster Building : CSE Herbert H. Dow Building : Dow
Walter E. Lay Automotive Engineering Laboratory : Auto Lab
POWERING FUTURE MOBILITY
MAY 21ST, DAY 1 PROGRAM
7:30 – 8:00 CHECK-IN AND BREAKFAST Stamps Auditorium
8:00 – 8:15 WELCOME & OPENING REMARKS Stamps Auditorium
Prof. Anna Stefanopoulou, Director, Automotive Research Center
Prof. Stephen Forrest, Vice President for Research, University of Michigan 8:15 – 9:50 PLENARY SESSION Stamps Auditorium
Introductions
Dr. David Gorsich, Chief Scientist, U.S. Army TARDEC
Distinguished Speakers
Dr. Grace Bochenek, Chief Technology Officer, U.S. Army Materiel Command
Dr. Scott Fish, Chief Scientist, U.S. Army
Mr. Gary Rogers, President & CEO, FEV, Inc.
Mr. Craig Savonen, Director, Engine Product Engineering, Daimler Trucks NAFTA
Question & Answer session
9:50 – 10:00 Group Photo Outside
10:00 – 10:30 BREAK Stamps Auditorium
10:30 – 12:00
CASE STUDY SESSION Stamps Auditorium
1. Enabling Integrated Powertrain Experiments in Networked Distributed Laboratories
2. Reliability-Based Design Optimizations Code and Its Applications
12:00 – 1:30 LUNCH Pierpont Commons
1:30 – 3:30 TECHNICAL SYMPOSIUM 1 – Parallel Sessions (see enclosed matrix) CSE / Dow
1A: JP-8 Studies, IC Engines CSE 1670
1B: Thermal Dynamics & Hybrid Powertrains CSE 1690
1C: Design/V&V/Reliability DOW 1013
3:30 – 5:30 POSTER SESSION & LAB TOURS CSE / Auto Lab

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
Computer Science Engineering Building / Bob and Betty Beyster Building : CSE Herbert H. Dow Building : Dow
Walter E. Lay Automotive Engineering Laboratory : Auto Lab
POWERING FUTURE MOBILITY MAY 22ND, DAY 2 PROGRAM
7:30 – 8:00 BREAKFAST Stamps Auditorium
8:00 – 8:05
WELCOME Stamps Auditorium
Prof. Dawn Tilbury, Deputy Director, Automotive Research Center
8:05 – 9:30 PLENARY SESSION Stamps Auditorium
Introductions & Moderator
Mr. David Thomas, Director, National Automotive Center
Distinguished Speaker
Dr. Arun Majumdar, Director ARPA-E, Department of Energy “Catalyzing Energy Breakthroughs for a Secure American Future”
Panel Discussion
“Diverging Future of Automotive Systems in Civilian and Military Vehicle Applications”
Dr. Peter Schihl, Senior Technology Expert (GVPM), U.S. Army TARDEC
Mr. Kyle Kimel, President and CEO, AVL Test Systems Inc.
Dr. Matthew Brusstar, Director, Advanced Powertrain Center, U.S. Environmental Protection Agency
Dr. Emilio Bunel, Director, Chemical Science and Engineering Division, Argonne National Laboratory
Prof. Huei Peng, US Director, US - China Clean Energy Research Center - Clean Vehicle Consortium Dr. Matthew Reed, Head Biosciences Group, University of Michigan Transportation Research Institute
Mr. Eric Hausman, Project Manager, University of Michigan Solar Car Team
9:30 – 10:00 BREAK CSE / Dow
10:00 – 12:00 TECHNICAL SYMPOSIUM 2 – Parallel Sessions (see enclosed matrix) CSE / Dow
2A: Mobility/Terramechanics CSE 1670
2B: Electrified Powertrains: Design & Characterization CSE 1690
2C: Survivability/Reliability Dow 1013
12:00 – 1:30 LUNCH CSE
1:30 – 3:30 POSTER SESSION CSE

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
SPEAKER INFORMATION
DR. SCOTT FISH is the Chief Scientist of the U.S. Army. He serves as the chief scientific advisor to Senior Army Leadership, and provides assessments on a wide range of scientific and technical issues affecting the Army mission. In this role he identifies and analyzes technical issues and brings them to the attention of Army Leaders, and interacts with operational commanders, combatant commands, acquisition, and science and technology communities to address cross-‐organizational technical issues and solutions. He interacts with other services and the Office of the Secretary of Defense along with the Deputy Assistant Secretary for Research and Technology on issues affecting the Army in-‐house
technical enterprise. He is also the principal science and technology representative of the Army to the civilian scientific and engineering community and to the public at large.
Dr. Fish is on leave of absence from the University of Texas at Austin, where he was the Director of the Institute for Advanced Technology, specializing in hypervelocity physics, electrodynamics, and pulsed power systems integration. He has served as an Assistant Vice President for Technology at Science Applications International Corporation, and lead programs in large-‐scale robotics and intelligent systems while at the Defense Advanced Research Projects Agency. Dr. Fish started his career with the Naval Surface Warfare Center conducting research in a wide range of fluid mechanics areas from torpedo launch to ship wake signature reduction as well as ship system integration associated with high power electrical weapons.
DR. GRACE BOCHENEK is the first Chief Technology Officer (CTO) for the U.S. Army Materiel Command (AMC), which is the lead agency for development, delivery, and sustainment of materiel to ensure a dominant joint force for the United States and its Allies. A 2008 recipient of the Meritorious Executive Presidential Rank Award and member of the Senior Executive service, Dr. Bochenek brings more than 25 years of scientific, technical and managerial experience to the CTO role. Dr. Bochenek serves as the senior civilian authority for science, technology and engineering with responsibility for developing and executing a long-‐term research, development,
technology and engineering transformation and organizational realignment and restructuring. In this role, Dr. Bochenek establishes the technical vision and leads all aspects of AMC technology development, sets the strategic direction for a full range of Army systems investments and drives strategic alignment with the Assistant Secretary of the Army for Acquisition, Logistics and Technology and the U.S. Army Training and Doctrine Command to ensure rapid and responsive delivery of products. Additionally, she leads the execution of the technology strategy for platforms, partnerships and external relationships and provides technical advice, guidance and recommendations that form the basis for high level policy and management decisions. Prior to this assignment Dr. Bochenek served as Director of the U.S. Army’s Tank Automotive Research, Development and Engineering Center (TARDEC), the premier Army laboratory for advanced military automotive technology for ground vehicle systems and logistics support equipment. As Director she created and led all research, development and engineering strategies for the Department of Defense’s ground vehicle manned and unmanned systems with military impact worldwide. She has also held the positions of Deputy Program Executive Officer for Program Executive Office Combat Support and Combat Service Support and Executive Director for Research and Technical Director at TARDEC. Bochenek has a B.S. in electrical engineering from Wayne State University, an M.S. in engineering from the University of Michigan and a Ph.D. in Industrial Systems Engineering from the University of Central Florida.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
MR. GARY ROGERS is President and Chief Executive Officer, FEV, Inc., and Executive Vice President (Geschäftsführer), FEV Motorentechnik, GmbH. Hi s previous positions have included: Director, Power Plant Engineering Services Division and Senior Analytical Engineer, Failure Analysis Associates, Inc.; Design Development Engineer, Garrett Turbine Engine Company; and Exploration Geophysicist, Shell Oil Company. He has extensive experience in research, design, and development of advanced engine and power systems including homogeneous and direct injected gasoline engines, high speed direct injection (HSDI) passenger car diesel engines, heavy-‐duty diesel engines, hybrid
vehicle systems, gas turbines, pumps and compressors. He has also directed both research and production development of engines and power systems utilizing renewable and alternative fuels including ethanol, methanol, biodiesel, Fischer-‐Tropsch-‐derived and gaseous fuels. He provides corporate leadership for a multinational research, design and development organization specializing in engines and energy systems. Mr. Rogers is a member the American Society of Mechanical Engineers and a Fellow Grade Member of the Society of Automotive Engineers (SAE). He sits on the Executive Management Committee which founded the SAE North American International Powertrain Conference. He also serves as a member of the Advisory Board to the College of Engineering and Computer Science, Oakland University, Rochester, Michigan and is a member of the President’s Advisory Board of Clemson University. He has served as a member of several committees under the National Academy of Sciences including: National Research Council (NRC) Committee on Program Review of DOE’s Office of Heavy Vehicle Technologies; the NRC Committee on the Effectiveness and Impact of Corporate Average Fuel Economy (CAFE) Standards; the NRC Panel on Benefits of DOE’s Light-‐Duty Hybrid Vehicle R&D Program; the NRC Committee evaluating the 21st Century Truck Partnership; the NRC Fuel Economy of Light Duty Vehicles Committee and previously supported the Department of Transportation, National Highway Traffic Safety Administration as a peer reviewer of the NHTSA CAFE Model. Mr. Rogers currently serves as a member of the National Academies Board on Energy and Environmental Systems. He earned a Master of Engineering (Mechanical), University of Colorado; a B.S.M.E. from Northern Arizona University and received his Professional Engineer registration in Mechanical Engineering from the State of Arizona.
MR. CRAIG L. SAVONEN is the Director of Performance and Emissions, Engine Product Engineering at Daimler Trucks NAFTA. Savonen began his career in 1984 as a technology engineer within the Technology & Planning Department of GM-‐Detroit Diesel Allison, developing his expertise in Thermodynamics, Combustion, and Emissions development. Along the way, he led model enhancements and applications of analytical tool sets including cycle simulation, 3D fluid flow and combustion analysis tools within the industrial environment. In the late 1980’s, he led a team to the first officially certified alternate fuel
(methanol) heavy duty engine. As technology group manager within the Advanced Engineering team of Detroit Diesel (Penske and then DaimlerChrysler parent companies), he was a key contributor to the advancement of engine controls and fuel economy in long haul heavy duty vehicles, including the Series 60 engine family. During this timeframe, Savonen also managed several US DOD and DOE sponsored pre-‐development programs. In 2001, Savonen transitioned to manager of final product development of fuel injection systems and engine system controls for the new DD13, DD15, and DD16 global engine families now produced under the Detroit brand for Daimler Trucks North America. Since 2009, he has been director of the Performance and Emission Department, which includes NAFTA responsibilities for engine/powertrain product development for performance, fuel economy, and emissions, and elements of OBD compliance, as well as low and high pressure fuel system hardware and software. Multi-‐functional engineering vehicle testing complement this span of product validation responsibility. Savonen received his MSME degree from Michigan Tech in 1984.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
DR. ARUN MAJUMDAR became the first Director of the Advanced Research Projects Agency -‐ Energy (ARPA-‐E), the country's only agency devoted to transformational energy research and development, in October 2009. Prior to joining ARPA-‐E, Dr. Majumdar was the Associate Laboratory Director for Energy and Environment at Lawrence Berkeley National Laboratory and a Professor of Mechanical Engineering and Materials Science and Engineering at the University of California, Berkeley. His highly distinguished research career includes the science and engineering of energy conversion, transport, and storage ranging from molecular and nanoscale level to large energy systems. In 2005, Dr. Majumdar was elected a member of
the National Academy of Engineering for this pioneering work. At Berkeley Labs and UC Berkeley, Dr. Majumdar helped shape several strategic initiatives in the areas of energy efficiency, renewable energy, and energy storage. He also testified before Congress on how to reduce energy consumption in buildings. Dr. Majumdar has also served on the advisory committee of the National Science Foundation's engineering directorate, was a member of the advisory council to the materials sciences and engineering division of the Department of Energy’s Basic Energy Sciences, and was an advisor on nanotechnology to the President's Council of Advisors on Science and Technology. Additionally, Dr. Majumdar has served as an advisor to startup companies and venture capital firms in the Silicon Valley. He received his bachelor’s degree in Mechanical Engineering at the Indian Institute of Technology, Bombay in 1985 and his Ph.D. from the University of California, Berkeley in 1989.
PANELIST INFORMATION
DR. PETER (PETE) SCHIHL is currently the Senior Technical Expert of the RDECOM-‐TARDEC Ground Vehicle Propulsion and Mobility Laboratory and has worked at TARDEC since 1991. His research throughout the last eighteen years has concentrated on developing and experimentally validating simplified combustion and ignition models for military relevant diesel engines and most recently has focused on combustion characteristic differences between diesel fuel and JP-‐8, and other relevant military heavy fuels. To date, many articles have resulted from his work and he has received the ‘Best Paper in Session’ award at the 1996, 1998, 2000, 2004, 2006, 2008, and 2010 Army Science Conferences and twice
has received Department of Army Research and Development Achievement Awards (2005 and 2009). Dr. Schihl is a reviewer for SAE, ASME, and the Journal of Engine Research in his subject field of expertise, and since 1998 has been an invited reviewer at various Department of Energy Advanced Compression Ignition Engine Technology National Lab reviews. Dr. Schihl earned a Ph.D. from the University of Michigan that was focused on diesel combustion systems and has M.S. and B.S. degrees in Mechanical and Systems Engineering from Oakland University where he also received a four year, full-‐ride basketball scholarship to play for Coach Greg Kampe. Previous to the Army, he worked as a graduate research assistant at Oakland University studying the use of photo-‐thermal radiometry for assessing thin coating thermal properties and also was a research assistant at the General Motors Research Laboratory studying the use of telemetry for indirectly measuring tappet stress in a 3.1 liter Chevrolet engine. He is currently an adjunct faculty member at Lawrence Technological University where he has taught Heat Transfer and currently holds a State of Michigan boy’s high school state record for blocked shots in a playoff game.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
MR. KYLE KIMEL is the President of AVL Test Systems Inc. (TSI) and is responsible for all North American sales, operations and business development for the AVL family of powertrain instrumentation and testing products and services. He has over 28 years’ experience in engine and powertrain development and testing.
Kimel joined AVL in 2005, as the Director of Sales and assumed his current position of President, TSI, in September 2011. Prior to AVL, Kimel held several engineering leadership positions with Lotus Engineering, MTS Systems, ETAS and Kistler Instruments. He holds a Bachelor of Science degree in Mechanical Engineering from the University of Michigan and is
a graduate of the Executive Business Leadership Program at Stanford University.
DR. MATTHEW BRUSSTAR is the Director of the Advanced Powertrain Center at EPA’s National Center for Advanced Technology in Ann Arbor, where he is leading the research, development and assessment of new and emerging automotive technologies. Matt has been with the U. S. EPA for over thirteen years, focusing mainly on advanced engine research, where he has produced several publications, presentations and patents. Prior to that, he worked in the automotive, power generation and aerospace industries. Matt is a three-‐time University of Michigan graduate, most recently earning his Ph.D. in Mechanical Engineering back in 1995.
DR. EMILIO BUNEL is the Director of the Chemical Sciences and Engineering Division at the U.S. Department of Energy's Argonne National Laboratory. Bunel received his M.S. in Chemical Engineering in 1980 from the University of Chile, and his Ph.D. in chemistry from the California Institute of Technology in 1988. He began his professional career at DuPont Central Research as a member of the Catalysis Group. He was responsible for the discovery and subsequent development of new processes for the synthesis of Nylon intermediates required in the manufacture of Nylon-‐6,6 and Nylon-‐6.
In 2001 Bunel was hired by Eli Lilly to establish the Catalysis Group within the Discovery Research Organization. In 2003 he was appointed Associate Director at Amgen, Inc., and subsequently in January 2008, Research Fellow at Pfizer, Inc.
After spending twenty years in industry, in October 2008 Emilio Bunel was named director of the Chemical Sciences and Engineering Division at U.S. Department of Energy's Argonne National Laboratory, where he is responsible for directing a science-‐based research, development, and early-‐stage engineering organization that conducts both fundamental and applied research in chemistry and chemical engineering.
One of the areas that he is responsible for is Electrochemical Energy Storage, internationally recognized as a world-‐class center for lithium battery R&D where the integration of basic research, applied R&D, engineering, and battery testing, as resulted in new technologies currently being deployed by industry.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
PROF. HUEI PENG US Director, US-‐China Clean Energy Research Center-‐Clean Vehicle Consortium Professor, Department of Mechanical Engineering, The University of Michigan Huei Peng received his Ph.D. from the University of California, Berkeley in 1992. He is currently a Professor at the Department of Mechanical Engineering at the University of Michigan. His research interests include adaptive control and optimal control, with emphasis on their applications to vehicular and transportation systems. His current
research focuses include design and control of hybrid vehicles and vehicle active safety systems. In the last 10 years, he was involved in the design of several military and civilian concept vehicles, including FTTS, FMTV, and Super-‐HUMMWV—for both electric and hydraulic hybrid vehicle concept designs. He is currently the US Director of the Clean Energy Research Center—Clean Vehicle Consortium, which supports 29 research projects related to the development and analysis of clean vehicles in US and China. He also leads an education project funded by DOE to develop 10 undergraduate and graduate courses including three laboratories courses focusing on transportation electrification. He has more than 200 technical publications, including 80 in referred journals and transactions. Huei Peng has been an active member of the Society of Automotive Engineers (SAE) and the ASME Dynamic System and Control Division (DSCD). He served as the chair of the ASME DSCD Transportation Panel from 1995 to 1997, and is a member of the Executive Committee of ASME DSCD. He served as an Associate Editor for the IEEE/ASME Transactions on Mechatronics from 1998-‐2004 and for the ASME Journal of Dynamic Systems, Measurement and Control from 2004-‐2009. He received the National Science Foundation (NSF) Career award in 1998. He is an ASME Fellow.
DR. MATTHEW REED is a Research Associate Professor and Head of the Biosciences Division of the University of Michigan Transportation Research Institute. Dr. Reed also serves as the Director of the Human Motion Simulation Laboratory at the Center for Ergonomics in the University of Michigan Industrial and Operations Engineering Department. Dr. Reed’s research interests focus on physical ergonomics, engineering anthropometry, and vehicle safety. He has conducted research on occupant restraint systems, emphasizing investigation of airbag-‐induced injuries, crash dummy positioning procedures, belt restraints, and child passenger
safety. He has developed tools for the ergonomic design of vehicle interiors, including widely used posture prediction and motion simulation algorithms for use with digital human figure models. Dr. Reed is a Fellow in SAE International and a member of the SAE Human Accommodation and Design Devices Committee, Driver Vision Standards Committee, and Truck and Bus Human Factors Committee. Dr. Reed has received the SAE Award for Excellence in Oral Presentation nine times, as well as the Lloyd L. Withrow Distinguished Speaker Award in 1997, 2004, and 2010. He has received outstanding paper awards from the Society of Automotive Engineers: the Arch T. Colwell Merit Award in 2005, the Myers Award in 2000, and the Isbrandt Award for crash safety research in 1996 and 2004. ([email protected], http://mreed.umtri.umich.edu)
MR. ERIC HAUSMAN is the 2013 Project Manager for the University of Michigan Solar Car. He is currently a Junior majoring in Industrial and Operations Engineering. He has been a life long Michigan fan and has been following the solar car team since elementary school. In his role as Project Manager, Eric oversees the entire project and helps to keep all divisions coordinated and on schedule.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
CASE STUDY ABSTRACTS
CASE STUDY 1
Enabling Integrated Powertrain Experiments across Networked Distributed Laboratories The hardware-in-the-loop (HIL) simulation concept is a critical engineering tool that merges the cost-
effectiveness of computer simulation with the higher fidelity of a physical experiment. In a HIL framework, the system components whose mathematical representations cannot satisfactorily deliver the high accuracies needed are represented with physical prototypes, whereas the rest of the system is simulated virtually. System performance with actual hardware can be validated, since low order models used for design may not provide sufficient accuracy, and system development time, effort, and cost can be reduced.
This case study highlights our basic research to enable the integration of multiple HIL laboratories even if the laboratories are geographically distributed. The aim is to achieve this integration over the Internet to avoid the cost of physically co-locating the hardware components. This technology is referred to as Internet-distributed hardware-in-the-loop (ID-HIL) simulation and is a key enabler for global concurrent engineering.
Specifically, the case study presents the ID-HIL simulation of a hybrid electric vehicle, in which the battery and the engine are the hardware components and the rest of the vehicle is simulated. To this end, the battery-in-the-loop and engine-in-the-loop testing laboratories at the University of Michigan are connected over the network, where a high power battery is physically tested in a laboratory with a specialized cycler and environmental chamber, and a medium-duty diesel engine is physically connected in another facility with a dynamic transient dynamometer. This ID-HIL setup is used to experimentally validate a novel power split algorithm, as well as a technique to improve the fidelity of the ID-HIL simulation when network delays are high.
CASE STUDY 2
Reliability-Based Design Optimizations Code and Its Applications This case study provides a demonstration of technology transfer of ARC research. Ford (industry), Univ.
of Michigan (academia), and TARDEC (government) came together and integrated the Iowa-RBDO (I-RBDO) code with their application-specific M&S codes to perform reliability analysis and reliability-based design optimization (RBDO) for several designs.
The Iowa team has carried out basic research in reliability analysis and RBDO methods, which have been integrated into the I-RBDO code. These include a method to model input marginal and joint distributions from given data using a Bayesian method and copulas, and a performance measure approach by carrying out inverse reliability analysis using the dimension reduction method (DRM) to search for an accurate most probable point. The DRM-based method performs a FORM-based inverse reliability analysis or a SORM-like inverse reliability analysis as per the user’s command. The capability of this RBDO method was successfully demonstrated in the past to obtain reliable optimum designs of Army ground vehicle components for durability.
More recently, for expansion to broader applications, the Iowa team has developed a new sampling-based RBDO method using dynamic Kriging (D-Kriging) surrogate models on local windows. For the D-Kriging method, accurate surrogate models are obtained by using a genetic algorithm for selection of optimum basis functions, the pattern search algorithm for selection of optimum correlation parameter, and a sequential sampling method for an efficient optimal experimental design. For the sampling-based RBDO, the sensitivity analysis is carried out using the score functions that are derived from marginals and copulas. Thus, the new sampling-based RBDO does not require sensitivity analysis from the user’s M&S codes, and it can be very easily integrated with any M&S codes as black-boxes via a very simple ASCII interface file. The sampling-based RBDO method is integrated in the I-RBDO code. The user interface of I-RBDO is very easy to use. The I-RBDO code also allows users to use their own surrogate models for deterministic design optimization and RBDO. In this case, the sampling-based RBDO does not require sensitivity from the user's surrogate model.
18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
The Ford team is carrying out multidisciplinary RBDO of a vehicle structure to minimize the weight and
satisfying safety and NVH requirements. This vehicle model contains about 1,060,000 elements with a total mass of 1644kg. The crashworthiness analyses are carried out by using LS-DYNA and the NVH by MSC/NASTRAN. The optimization problem consists of 44 gauge design variables which are all random variables with normal distributions. The objective of the optimization problem is to minimize the vehicle weight while satisfying the baseline targets. The design constraints, with 90% reliability, are toe-board intrusion, chest G and crush distance for safety attribute and natural frequencies for NVH.
The Univ. of Michigan team has developed advanced M&S tools for the evaluation of vehicle structural dynamic response under component damage scenarios and/or design changes. These tools are integrated in the parametric reduced order modeling (PROM) code. As a demonstration, the PROM code has been stitched to the I-RBDO code. The focus of the analysis is the frame of an HMMWV. The structure is optimally designed to limit the maximum stresses in the structure (i.e., the design constraints) while minimizing vibrations. The thicknesses of several components of the frame (i.e., the design parameters) are optimally designed such that the vibration energy input into the frame from the road and the engine (i.e., the cost function) is minimized.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
TECHNICAL SYMPOSIUM DAY 1
May 21 A: JP-8 Studies & IC Engines Session Co-Chairs: Peter Schihl, Nicholas Johnson Room: CSE 1670
B: Thermal Dynamics & Hybrid Powertrains Session Co-Chairs: Yi Ding, Sonya Zanardelli Room: CSE 1690
C: Design/V&V/Reliability Session Co-Chairs: Mark Brudnak, Amandeep Singh Room: DOW 1013
13:30 Autoignition Characteristics of JP8, ULSD, Synthetic and Biodiesel Fuels, PI: Naeim Henein
Control and System Integration of an SOFC/GT-based APU with Extended Dynamic Capabilities for Military Vehicle, PIs: Jing Sun, Soryeok Oh
Validation of Simulation Models of Dynamic Systems, PIs: Michael Kokkolaras, Greg Hulbert
13:55 Development of Comprehensive JP-8 Surrogate for Heavy Duty Compression Ignition Engine, PI: Angela Violi, Jason Martz
Computationally-Efficient 3D Finite-Element-Based Thermal Models of Electric Machines, PI: Heath Hofmann
HEV Powertrain Architecture Exploration Using Bond Graphs, PIs: Panos Papalambros, Michael Kokkolaras
14:20 Cold Start Testing of a Production High Power Truck Engine with Different Alternative Fuels, PI: Dinu Taraza
Automotive Thermal Management – A Combined Numerical and Experimental Study of Battery Pack Cooling in Hybrid Vehicles, PIs: John Wagner, Lin Ma
Accelerated Testing for Vehicle Systems using Time-Dependent Reliability Principles, PI: Zissimos Mourelatos
14:45 – 15:10
Intricate Dynamics and Frictional Losses of the Piston-Assembly in IC Engines, PI: Nabil Chalhoub
Bilevel Multiobjective Optimization for the Battery Thermal Packaging Design, PIs: Margaret Wiecek, Geoges Fadel
Reconfigurable Control for Failure Prevention and Recovery, PIs: Dawn Tilbury, Ella Atkins
TECHNICAL SYMPOSIUM DAY 2
May 22 A: Mobility/Terramechanics Session Co-Chairs: Al Reid, Paramsothy Jayakumar Room: CSE 1670
B: Electrified Powertrains: Design and Characterization Session Co-Chairs: Yi Ding, Sonya Zanardelli, Wes Zanardelli Room: CSE 1690
C: Survivability/Reliability Session Co-Chairs: David Lamb, Harry Zywiol Room: DOW 1013
10:00 Advancements in TerrainSim: Terrain Characterization, Modeling, Analysis, and Synthesis Software, PI: John Ferris
Electrified Propulsion Systems: Integration of e-Motors and Sizing Based on Thermal Load Consideration, PI: Zoran Filipi
A Blast Event Simulation Process for Multi-Scale Modeling of Composite Armor for Light Weight Vehicles, PI: Nick Vlahopoulos
10:25 Off-Road Soft Soil Tire Model Development, Validation, and Interface to Commercial Multibody Dynamics Software PI: Corina Sandu
Optimal Charging of Ultracapacitors During Regenerative Braking, PI: Ardalan Vahidi
Sampling-based RBDO using Stochastic Sensitivity Analysis and Virtual Support Vector Machine, PI: K.K. Choi
10:50 Integrated Power Systems for Improved Mobility of Ground Robotics, PI: Huei Peng
Neutron Imaging of Lithium Ion Batteries: Toward Parameterization of High Fidelity Lithium Ion Battery Models for High Power Applications, PI: Anna Stefanopoulou, Jason Siegel
Parametric Reduced Order Models for Fatigue Life Predictions of Hybrid Electric Vehicle Batteries, PI: Bogdan Epureanu
11:15 – 11:40
UGV System Reliability Modeling & Improvement, PI: Judy Jin, A. Galip Ulsoy
High Energy Density Asymmetric Capacitors, PI: Levi Thompson
Soldier-Centered Vehicle Seating Design Tools based on Measurement and Modeling of Soldiers, PI: Matthew Reed
18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
TECHNICAL SYMPOSIA ABSTRACTS
Day 1 Technical Session A – JP-8 Studies, IC Engines & Thermal Management Session Co-Chairs: Dr. Peter Schihl, Mr. Nicholas Johnson
1A1: Autoignition Characteristics of JP8, ULSD, Synthetic and Biodiesel Fuels; C. Jayakumar, U Joshi, Z. Zheng, PI: Naeim A. Henein (Wayne State U.)
The investigations on the autoignition characteristics of JP8, ULSD, synthetic S-8 fuels included experimental, detailed analysis of the rate of heat release (RHR) and diesel cycle computer simulations. Two types of JP-8 are investigated. The first is JP-8 with a high cetane number (CN=44). The second has CN of 31 which has been reported to cause serious problem to military engines in the field. The experiments were conducted on a single-cylinder high speed research diesel engine equipped with a common rail injection system. The inlet air temperature was varied to calculate the global activation energy of different fuels based once on the total ignition delay (ID) and another time on the chemical part of I.D. The difference in the activation energies is found to be the inclusion of the physical delay in the total dely. Detailed analysis of experimental results of the rate of heat release (RHR) for the different fuels indicated the presence of the LTHR (low temperature heat release or “cool flame”) and the NTC (negative temperature coefficient) regimes in the autoignition of JP-8(31). These regimes slow down the autoignition process and increase the ID to a point where the engine misfires. Diesel cycle computer simulations showed the role of aldehydes in slowing the autoignition exothermic reactions and agreed with the experimental results on the effect of the increase in charge temperature and pressure on reducing the LTHR and HTHR of the low-CN JP-8.
1A2: Development of Comprehensive JP-8 Surrogate for Heavy Duty Compression Ignition Engine; Doohyun Kim, Paolo Elvati, Angela Violi (PI), Jason Martz (U. of Michigan);Peter Schihl, Laura Hoogterp, Nick Johnson (TARDEC); Craig Savonen, Justin Kollien, Kevin Sisken (DDC)
The use of JP-8 on ground vehicles with compression ignition engine is mandated by Army’s single battlefield fuel policy. Expected cetane number variation of petroleum/coal/natural gas based JP-8 is wide enough (30s ~ 60s) to cause significant changes in combustion phasing, mode, and rate, which may lead to serious durability and fuel economy problems. In this work, a comprehensive JP-8 surrogate is developed for CFD engine simulation which is a fundamental tool to analyze the effect of different physical and chemical properties of JP-8, including cetane number, on its combustion characteristics. 4-component and 5-component mixtures are formulated by optimization process to represent hydrocarbon class distribution and to match target properties of real JP-8. Blending ratios of these surrogates for low, mid, and high cetane number JP-8 is also proposed. Furthermore, available chemical mechanisms which enable simulation of proposed surrogate are tested and selected.
1A3: Cold Start Testing of a Production High Power Truck Engine with Different Alternative Fuels; Florin Mocanu, Amrinder Singh, Madhu Palanisamy, PIs: Dinu Taraza (presenter), Marcis Jansons, Naeim Henein (Wayne State U.)
A major concern for military vehicles is the prompt and sure engine starting in very cold environments. In this project, a six cylinder commercial truck diesel engine: Mercedes Series 900 (250 HP @ 2200 rpm- 800 lb.ft 1300 – 1600 rpm) has been fully instrumented with pressure transducers on each cylinder and tested in the cold room facility at Wayne State University. Cold starting with two different fuels: ULSD and JP8 were conducted at temperatures ranging from 700F to 00F. The engine fully started with ULSD down to 200F and with JP8 down to 160F. At lower temperatures the engine fueled with JP8 reached Idling speed, but failed to start due to inadequate fuel injection strategy. The fuel injection was reduced, even completely cut, or desynchronized with the pressure pulse in the injector high pressure line. These preliminary results point out the necessity to improve fueling strategy for cold starting in the electronic controls of the engine. Further investigations will concentrate on the development of better fuel injection strategies.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
1A4: Intricate Dynamics and Frictional Losses of the Piston-Assembly in IC Engines; Mohannad Hakeem, PI: Nabil G. Chalhoub, Naeim A. Henein (Wayne State U.); Pete Schihl (TARDEC)
The intricate dynamics of the piston-assembly directly affect the performance of IC engines by influencing their fuel efficiency through frictional losses, thermal efficiency through blow-by, emissions through oil consumption, durability through wear, and engine noise through piston-slap. In this work, a dynamic model for the crank-slider mechanism of a single cylinder engine has been developed to predict the intricate dynamics and the lubrication regimes of the piston-assembly under various engine operating conditions. The formulation considers the interconnected motions of the crankshaft, connecting-rod, piston (including piston-slap and piston-tilting), and ring-pack using a multi-body dynamic approach. Each ring is considered to have three rigid body degrees of freedom in addition to its longitudinal and in-plane transverse deformations. The structural flexibility terms are approximated by using curved beam finite elements derived based on the Timoshenko beam theory. Moreover, the model has a variable structure whose number of degrees of freedom depends on the liner-piston-ring interactions. Furthermore, the solid-fluid interaction between the lubricating oil film and the piston-assembly is considered for determining the friction losses induced by the hydrodynamic lubrication regime of the piston-skirt and the elasto-hydrodynamic lubrication regime of the rings.
Day 1 Technical Session B – Thermal Dynamics & Hybrid Powertrains Session Chair: Dr. Yi Ding
1B1: Control and System Integration of an SOFC/GT-based APU with Extended Dynamic Capabilities for Military Vehicle; Zhenzhong Jia, PIs: Jing Sun, Soryeok Oh (U. of Michigan); Herb Dobbs, Joel King (TARDEC); Owen Taylor (Pittsburgh Electrical Engine Inc.)
Integrating high temperature solid oxide fuel cells (SOFC, 600-800degC) with a gas turbine (GT) is an effective strategy to develop highly efficient and clean power generation solutions. While the concept of SOFC/GT is very appealing for mobile applications (such as for military vehicles) from the energy conversion efficiency point of view, its feasibility depends critically on the dynamic characteristics of the combined cycle system. This project is aimed at addressing the control and system integration challenges of SOFC/GT to achieve safe, efficient and fast load following under different operating conditions and various constraints. This presentation will focus on the dynamic analysis of the SOFC/GT system with battery and dual mode generator/motor (G/M). The relative merits of different system integration strategies are explored to extend the dynamic capabilities and improve the load following performance of the SOFC/GT system. In particular, the study shows that by taking full advantage of the bi-directional operation of G/M, one can better manage the trade-offs between power tracking and thermal management, thereby further reducing battery power and energy requirements for the integrated system.
1B2: Computationally-Efficient 3D Finite-Element-Based Thermal Models of Electric Machines; Kan Zhou, Jason Pries, PI: Heath Hofmann (U of Michigan); Denise Kramer (TARDEC); Lei Hao (GM.
Knowledge of the internal temperatures of an electric machine under real-time operating conditions would be extremely useful in order to determine its torque capabilities. This knowledge is also useful for full-scale electric vehicle simulation and optimization. In this work, we present a technique for developing computationally-efficient thermal models for electric machines that can be used for real-time thermal observers and vehicle-level simulation and optimization.
The technique is based upon simulating the eigenmodes of the thermal dynamics as determined by 3D finite element analysis. The order of the model is then dramatically reduced in two ways. First, the dynamic system is decomposed into two parts by using the orthogonal property of the eigenvectors. The extent of excitation of each eigenmode is calculated, and only eigenmodes that are significantly excited are included in the dynamic model; other eigenmodes are treated as static modes. Second, only a few “hot spots” in various regions are chosen.
The result is a thermal model that can accurately model internal temperatures of the machine while requiring the modeling of only a handful of states. Such a model can be used in vehicle simulations, or for real-time observers in actual vehicles. The computation time of the computationally-efficient reduced-order model presented in this work is reduced by more than 5 orders of magnitude compared with a typical full–order finite

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
element model. Experimental validation on a 145kW liquid cooling permanent magnetic surface mount machine is being undertaken to validate the presented thermal model.
1B3: Automotive Thermal Management – A Combined Numerical and Experimental Study of Battery Pack Cooling in Hybrid Vehicles; Joshua Finn, William Tao, John Wagner (Clemson U.); Lin Ma (Virginia Tech)
The operation of military vehicles in extreme temperature environments requires robust thermal management systems to effectively remove heat from the passenger compartment and powertrain components. The increasing need for heat rejection may be partially attributed to a greater emphasis on vehicle electronic content and alternative energy sources. This presentation describes a collaborative effort combing simulations and experiments to investigate advanced automotive thermal management concepts. First, a concluding ARC study will be presented in which thermoelectric devices have been applied using the concept of cooling zones to offer localized temperature regulation for electronic equipment and compartment occupants. Second, a new project is described which integrates numerical simulations (Clemson University) and experimental tests (Virginia Tech) to investigate hybrid vehicle battery pack cooling.
1B4: Bilevel Multiobjective Optimization for the Battery Thermal Packaging Design; Brian Dandurand, Paolo Guarneri, PIs: Georges Fadel, Margaret M. Wiecek (Clemson U.)
The battery thermal packaging design requires the optimization of the battery position in the vehicle to improve vehicle dynamics, component accessibility and passenger survivability subject to geometric constraints such as collision between the components in the vehicle, and the simultaneous optimization of cell layout inside the battery pack while considering thermal aspects. Since each optimization is driven by multiple performance criteria, the battery design motivates new research in mathematical optimization. Approaches are being developed to generating the Pareto set of the all-in-one (AiO) bilevel multiobjective problem by computing subproblem-specific approximations of the AiO Pareto set.
An adaptation of the block coordinate descent technique is proposed that makes use of decomposition in the objective and design space. This approach to decomposing a multiobjective problem suitably addresses the needs of the battery design problem. Each subproblem-specific approximation of the AiO Pareto set is iteratively updated based on previous subproblem updates so that the subsequent approximations converge to the AiO Pareto set. Convergence is claimed based on existing or newly proved results. Examples are provided and the relevance to the battery design is shown.
Day 1 Technical Session C – Design/V&V/Reliability Session Co-Chairs: Dr. Mark Brudnak, Dr. Amandeep Singh
1C1: Validation of Simulation Models of Dynamic Systems; Hao Pan, PIs: Michael Kokkolaras, Greg Hulbert (U. of Michigan)
Simulation models of dynamic system models typically generate time-dependent and correlated output with high dimensionality, uncertainty and noise. From the many model validation methods reported in the literature, most are not directly applicable to validating models of dynamic systems. Our research aims at addressing this issue by means of a particular framework that utilizes feature extraction techniques and Bayesian interval-based hypothesis testing. Although this framework addresses the validation problem uniquely by providing quantitative assessment of the goodness of the model by means of a confidence metric, it is based on several limiting assumptions. Moreover, its results can be sensitive to the determination of the integration limits in the Bayes factor calculation. We investigate assumptions and report improvements to model confidence quantification. The advantages of the presented framework are demonstrated using a benchmark validation problem derived specifically for a validation workshop organized by Sandia National Laboratories. Results are compared to those of other validation techniques and subject matter expert opinions. We also report on the contributions of our research to providing guidelines and tools for validating models in a tri-force power/energy community of interest with a particular application of an electro-thermal battery model developed by ARC researchers for electrified powertrains of military ground vehicles.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
1C2: HEV Powertrain Architecture Exploration Using Bond Graphs; Alparslan Emrah Bayrak, Yi Ren, PI: Panos Papalambros (U. of Michigan)
The introduction of mechatronic devices (e.g., motors and generators) to powertrain systems has largely enriched design possibilities, with various efficient powertrain architectures being proposed and realized. While existing research has covered all spectra from powertrain sizing and packaging to optimal control in driving cycles, there is no systematic way of exploring possible powertrain architectures. As an exploratory study to create "clean-sheet" design, we introduce a framework to enumerate and filter architectures by means of bond graphs. The automated procedure outputs system properties, e.g., degree of freedom, state space equations, etc. for architectures with different complexity, e.g., number of planetary gears in the system. We then search for the optimal graph with optimal control as a nested problem.
1C3: Accelerated Testing for Vehicle Systems using Time-Dependent Reliability Principles; Igor Baseski (TARDEC/OU), Jing Li, PI: Zissimos P. Mourelatos (Oakland U.); Amandeep Singh (TARDEC)
Reliability usually degrades with time increasing the product lifecycle cost. It expresses the probability that the product will perform its intended function successfully for a specified time. It is desirable to use accelerated testing to predict vehicle reliability using a few tests of short duration. Considering that certain vehicle parameters and the vehicle excitation are random, many vehicles must be tested which is impractical. To address this challenge, we are developing an accelerated testing approach based on both experiments and analysis. Because it is practically difficult to develop and use a detailed analytical (math) model of a vehicle which closely represents reality, our approach uses available tests to calibrate an approximate simulation model which is then used to determine the failure rate of the vehicle fleet. The failure rates are estimated using a subset simulation technique with Markov Chain Monte Carlo (MCMC) considering the terrain random process and different random variables representing vehicle to vehicle variability. The methodology will be institutionalized at the TARDEC Physical simulation lab. We will provide details including progress to-date, our test rig at TARDEC and future plans.
1C4: Reconfigurable Control for Failure Prevention and Recovery; John Broderick, PIs: Dawn Tilbury, Ella Atkins (U. of Michigan)
The objective of this research is to develop models, algorithms and methods both to prevent failures from occurring and to recover from or adapt to failures after they occur. Prior work within this project has considered failures in the robot’s manipulator arm (frozen joints) and thermal overload. Recent work considers the impact of limited battery power when exploring an area. A novel cost function can be used in an optimal control scenario to trade off power used and area covered. Two different coverage planners have been considered; the planned paths are converted into trajectories using the optimal control strategy. Simulation results highlight the differences between the two planners. Experimental results with the PackBot indicate that the battery power does not follow the simple relationship with motor torque that was assumed in the simulation model; research is ongoing to better understand the actual power usage as a function of vehicle speed. Near-term future work includes extending the work to mobility failure cases such as loss of traction. Longer-term, we plan to integrate the results into a reconfigurable control strategy that can both prevent failures (e.g., thermal overload and battery empty) and adapt to failures (e.g., frozen manipulator joints, loss of traction).
Day 2 Technical Session A – Mobility/Terramechanics Session Co-Chairs: Dr. Al Reid, Dr. Paramsothy Jayakumar
2A1: Advancements in TerrainSim: Terrain Characterization, Modeling, Analysis, and Synthesis Software; Philip Chin, Jacob Lambeth, Ma Rui, John Ferris (PI, Virginia Tech)
Terrain is the main vehicle excitation and is particularly challenging to model since it is a richly complex signal with significant physical characteristics over a wide range of wavelengths. TerrainSim software has been successfully developed to study terrain characteristics by providing multiple modeling and synthesis techniques and a comprehensive set of statistical analyses to determine the model quality. In addition to several enhancements to the Markov Chain modeling technique, TerrainSim’s abilities are being expanded to include:
18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
modeling a terrain surface, rather than only individual longitudinal profiles and modeling deformable off-road terrain, rather than being limited to non-deformable terrain. Recent results indicate that TerrainSim is now applicable to full surfaces, profiles, and their decompositions, as well as preliminary indications that it will be possible to model deformable terrain as part of a holistic approach to tire/terrain interaction.
2A2: Off-Road Soft Soil Tire Model Development and Experimental Testing; Eduardo Pinto, Scott Naranjo, Shahyar Taheri, PIs: Corina Sandu, Saied Taheri (Virginia Tech); Paramsothy Jayakumar (TARDEC); Brant Ross (MotionPort)
Accurate and efficient tire models for soft soil operations are needed for army mobility simulations. The tire model is essential in a vehicle model; the accuracy of the predicted forces and moments has a large impact on assessing the vehicle performance, reducing the number of stuck vehicles, avoiding rollovers, and developing advanced control strategies. While FEM lead to the most detailed tire-soil interaction models, their complexity and extensive computational effort make them less than ideal for the applications envisioned. Models such as the F-tire were developed for on-road applications. The semi-analytical soft-soil tire model developed employed a similar construction and added an advanced tire-soil contact model. Testing is performed on a single tire on silty sand in the terramechanics rig at Virginia Tech. The influence of tire and vehicle parameters and soil characteristics on the tire dynamics is studied. The silty sand has been tested in a commercial lab to extract its properties. The test tire has been instrumented with sensors for measuring the rolling tire deflection in real time. The goal of the project in the second year is to refine the tire model by incorporating accurate tire and soil parameters, enhancing traction and steering model capabilities, and conducting laboratory and field tire testing for validation.
2A3: Integrated Power Systems for Improved Mobility of Ground Robotics; William Smith, Tianyou Guo, PI: Huei Peng (U. of Michigan);
Small unmanned ground vehicles (SUGVs) play an important role in many industries, from planetary exploration to military defense. SUGVs are limited by their mobility, whether they become immobilized from traversing difficult terrain or from early energy depletion. Improved design and control of SUGV propulsion systems can limit these forms of immobilization, but this requires an improved understanding of the interaction between running gear and terrain. We present different approaches of modeling vehicle-terrain interaction for wheeled and tracked vehicles. Using numerical simulation techniques, we model dynamic wheel-soil interaction conditions to better characterize how rough terrain can influence vehicle performance and mobility. Better understanding of the influence that dynamic effects can have on performance may lead to improved vehicle design and online control. For tracked vehicles, we explore the importance of initial value selection when solving a steady-state Bekker skid steering model. We also evaluate an approximation method of the Bekker equations that results in a closed-form analytical solution, which is particularly useful for online control.
2A4: UGV System Reliability Modeling & Improvement; Amir Sadrpour, W. Rob Brown, PIs: Judy Jin, A. Galip Ulsoy (U. of Michigan); Greg Hudas (TARDEC); Rainer Gasche and Jason Suchman (iRobot)
The goal of this project is to develop methods to analyze and improve the reliability of unmanned ground vehicles (UGVs).
A new design method, to improve reliability and efficiency of a UGV manipulator arm, has been developed using passive elements (i.e., torsional springs) in parallel with joint motors for typical arm trajectories and loads. For a simple single-link arm the method has been shown experimentally to reduce maximum torques by about 50% and improve energy efficiency by up to 25%. Currently robust design methods are being explored to extend the design method to families of loads and trajectories and to multi-link arms.
A unified approach to UGV system reliability assessment that includes simulation-based acceptance testing, on-line monitoring combined with prior knowledge for predicting mission reliability, and the effects on reliability of the environment and the operator is presented. UGV mission battery end-of-life estimation under varying terrain conditions uses a vehicle model and a Bayesian framework to combine real-time estimation with prior knowledge (e.g., grade, road conditions, driver style) for adaptively updating the knowledge and assessing alternative decisions during the mission execution. Theory and simulations are completed, and experiments are planned for spring/summer 2012.

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
Day 2 Technical Session B – Electrified Powertrains: Design & Characterization Session Co-Chairs: Dr. Yi Ding, Dr. Wesley Zanardelli
2B1: Electrified Propulsion Systems: Integration of e-Motors and Sizing Based on Thermal Load Consideration; Xueyu Zhang, Andrej Ivanco, PI: Zoran Filipi (Clemson U.) Youngki Kim (U. of Michigan)
Improving the fuel economy of military trucks is a critical element in the US DoD’s effort to limit the increase of energy consumption in the battlefield, reduce the logistics burden and curb the ballooning expenses for fuel. Electrification and hybridization show great potential for improving fuel economy, and providing part of the solution. The fuel efficiency can be improved while preserving or improving other key vehicle attributes, e.g. performance and mobility. In particular, a series configuration with in-hub motors enables development of independent suspension with increased wheel travel for high cross-country speeds. However, significant cost, integration and control challenges have to be addressed before the technology is ready for applications to large military fleets. Our previous effort focused on applications of reduced order electro-chemical battery model for characterizing dynamic load schedules, critical surface concentration of ions, and utilization of the information for battery power management. This year’s effort is focused on a similar approach to e-Motor design and integration. We aim to utilize the new predictive capability enabled with scalable, reduced-order models of e-Motors developed by Prof. H. Hofmann’s complementary project for system level studies. A computationally efficient dynamic thermal model is created, that considers power losses and heat fluxes to estimate inner, otherwise immeasurable, temperatures of the electric machine. Consequently, HEV system analysis includes dynamic behavior of e-motors under aggressive duty cycles in the Mine Resistant Ambush Protected All-Terrain Vehicle (M-ATV), and considers motor size and cooling system parameters based on predictions of thermal load. This removes the uncertainty related to conventional approach that relies on a “continuous power” line vs. peak power line, and opens the door for studies of accessory power losses. The on-going work is focused on development of the dynamic programming framework that will enable a pioneering investigation of optimal power management of a series HEV with in-hub motors, while considering both propulsion power and accessory losses.
2B2: Optimal Charging of Ultracapacitors During Regenerative Braking; Yasha Parvini, PI: Ardalan Vahidi (Clemson U.)
Finding the optimal charging profile of an ultracapacitor energy storage system during a regenerative braking event is the focus of this paper. After showing that resistive losses can be high during a high power regeneration event, we formulate the charging problem in an optimal control framework with the objective of maximizing the energy recuperated into the ultracapacitor bank while satisfying braking power demands. We employ Pontryagin’s maximum principle to understand the necessary conditions the solution should satisfy and use numerical techniques to find such optimal solution(s).The result should provide more insight into the maximum achievable regeneration efficiency with ultracapacitors under different braking conditions and can also aid in sizing an ultracapacitor energy storage system and the associated power electronics device.
2B3: Neutron Imaging of Lithium Ion Batteries: Toward Parameterization of High Fidelity Lithium Ion Battery Models for High Power Applications; Jason Siegel, PI: Anna Stefanopoulou (U. of Michigan)
Lithium ion battery models based on porous electrode theory (by Fuller, Doyle, and Newman) have been developed and used by many researchers since the early 1990’s. However validation of these models by means other than input-output (current-voltage) behavior remains elusive. This project seeks to validate the spatial and temporal lithium concentration profiles across the electrodes and electrolyte during battery operation using in situ measurements from neutron imaging.
We first show parameterizations that match the terminal voltage of a Lithium Iron Phosphate (LFP) battery under various discharge rates and drive-cycle current profiles. The 1+1D model framework uses partial differential equations to describe the Lithium concentration across the battery electrolyte and electrodes. The Lithium intercalation in the solid material is coupled with the electrolyte lithium concentration through the Butler-Volmer reaction rate which varies across the electrode. The model contains 25 “tunable” parameters. Several of these

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
parameters can be determined via ex-situ methods, such as scanning electron microscopy or half-cell experiments. The remaining parameters need to be identified and can impact the lithium distribution and hence electrode utilization and measured terminal voltage. A comparison of the model predicted lithium distributions with the measurements from neutron imaging will identify gaps in the well-established modeling approach of the porous electrode theory, especially during high power (pulsed) operation of batteries.
Strong collaborations allowed us to surpass many technical limitations, namely design of experiment and material selection with Yi Ding from TARDEC, battery fabrication with Patrick Hagans and Danny King from A123, instrumentation with Dan Hussey and David Jacobson from NIST, signal statistics with David Gorsich from TARDEC, battery simulation software with Matt Castanier from TARDEC, model reduction and verification with Dyche Anderson and Yonghua Li from Ford, and fundamental battery transport phenomena with Charles Monroe from UMICH and Steve Harris from GM.
2B4: High Energy Density Asymmetric Capacitors; Priyanka Pande, PI: Levi Thompson, Paul Rasmussen (U. of Michigan); Yi Ding (TARDEC); Stefan Heinemann (Fraunhofer USA)
Batteries are the principal devices used for military and commercial energy storage applications. While these devices can have energy densities exceeding 100 Wh/kg, this energy is difficult to fully access in pulsed and high power applications due to the relatively slow kinetics associated with their redox processes. Supercapacitors offer much higher power densities and could complement batteries in pulsed power applications, however, their low energy densities are only sufficient for relatively short pulses (a few seconds). Our research is exploring the feasibility the using asymmetric cell designs and new, high capacity materials to produce asymmetric supercapacitors with energy densities that out-perform currently available devices and enable applications with longer pulses. This paper will describe our progress including a summary of performance characteristics for the materials and prototype cells, as well as the charge storage mechanisms for the early transition metal nitrides and carbides.
Day 2 Technical Session C – Survivability/Reliability Session Co-Chairs: Dr. David Lamb, Mr. Harry Zywiol
2C1: A Blast Event Simulation Process for Multi-Scale Modeling of Composite Armor for Light Weight Vehicles; John Kim, PI: Nickolas Vlahopoulos (U. of Michigan)
Lighter weight military vehicles facilitate faster transport, higher mobility, fuel conservation, and a reduced ground footprint of supporting forces. Composite materials provide some of the most viable options for manufacturing composite armor that can increase survivability without significant weight penalty. A multi-scale simulation process using the coupled MAC/GMC and ABAQUS explicit codes for computing the response of a structure subjected to a load from an explosion has been established during earlier stages of this project. The most recent efforts in incorporating micro-constitutive material behavior at high strain rate loading in the simulation process, formulating an inverse mapping capability for linking desired material properties with the composition of their micro structure in MAC/GMC, and conducting an optimization analysis for identifying the desirable material properties for increasing the blast resistant characteristics will be discussed.
2C2: Sampling-based RBDO using Stochastic Sensitivity Analysis and Virtual Support Vector Machine; Hyeongjin Song. PI: K.K. Choi (U. of Iowa); David Gorsich, David Lamb (TARDEC)
In this research, a sampling-based RBDO method using a classification method is proposed. The stochastic sensitivity analysis is used to compute sensitivities of probabilistic constraints with respect to random variables. Since the stochastic sensitivity analysis requires only the limit state function, and not the response surface or its sensitivity, it is desirable to develop an efficient classification method that can be used for a sampling-based RBDO. The proposed virtual support vector machine (VSVM), which is a classification method, is a support vector machine (SVM) with virtual samples. By introducing virtual samples, VSVM overcomes the deficiency in existing SVM that uses only classification information as their input. In this research, the universal Kriging method is used to obtain locations of virtual samples to improve the accuracy of the limit state function for highly nonlinear problems. A new sequential sampling strategy effectively inserts additional samples near the

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
limit state function. In the sampling-based RBDO, Monte Carlo simulation (MCS) is used for the reliability analysis and stochastic sensitivity analysis. Since SVM has simpler formulation than implicit methods such as Kriging, computational cost for evaluating a large number of MCS samples can be significantly reduced. Several efficiency strategies, such as the hyper-spherical local window for generation of the limit state function and the Transformations/Gibbs sampling method to generate uniform samples in the hyper-sphere, are also applied. Examples show that the proposed sampling-based RBDO with VSVM yields better efficiency in terms of the number of required samples and the computational cost for evaluating MCS samples while maintaining accuracy similar to that of sampling-based RBDO using the dynamic Kriging (D-Kriging) method.
2C3: Parametric Reduced Order Models for Fatigue Life Predictions of Hybrid Electric Vehicle Batteries; Sung Kwon Hong, PI: Bogdan I. Epureanu (U. of Michigan); Matt Castanier (TARDEC)
The goal of this work is to develop an efficient numerical modeling technology for fatigue life predictions of hybrid electric vehicle (HEV) batteries. Typically 100 or 200 (nominally) identical battery cells are stacked in a HEV battery pack. Since these cells are nominally identical, their dynamics suffers from very high modal density. The high modal density causes small structural variations from cell to cell to have very large consequences on the dynamics of the entire pack (in the range of frequencies where the modes are dense). Therefore, the fatigue life of a pack should be predicted by statistical dynamic response calculations. Such statistical calculations are hard to perform using sensitivity-based methods because the mode shapes of a pack depend in a nonlinear fashion on the parameters of each cell. The alternative is to use sample based statistical analyses, where many thousands of samples are required. However, typical finite element models of single packs have many millions of degrees of freedom. Thus, the computational time for just a single sample can be of the order of a day. One approach to overcome this challenge is to create parametric reduced-order models (PROMs). Herein, such new PROMs are developed. They able to predict the dynamics of battery packs 1,000 to 10,000 times faster than full order models while maintaining accuracy. The novel approach is based on two key assumptions. First, the mode shapes of a pack (with parametric variations) can be represented by a linear combination of the nominal pack (no parametric variations). This assumption is ensured by the high modal density. Second, the frame holding each cell moves. The variability in parameters in the corresponding cell is captured by mode shapes of the nominal cell with its boundary displaced the same amount as the frame. Numerical results to demonstrate the new method have been obtained. The PROM predictions agree very well with predictions of full-order models, with maximum errors between 1.18% and 1.64%. The analysis time required by the PROM for each variation by is about 9,000 times shorter than that of the full-order models. This computational gain is expected to be even larger for more refined models. That is because PROMs are able to capture the low-dimensional physics. Thus, and the size of the PROM is not expected to increase when the size of the full order model increases (e.g., by mesh refinement).
2C4: Soldier-Centered Vehicle Seating Design Tools based on Measurement and Modeling of Soldiers; PI: Matthew P. Reed (U. of Michigan, UMTRI)
The design of tactical vehicles to maximize crew performance and survivability is hampered by a lack of detailed data on the postures and positions of soldiers. Civilian design tools cannot be readily applied because military populations differ in body dimensions from civilians, the task conditions do not match typical civilian situations, and soldiers frequently wear personal protective equipment that affects body shape, posture, and position. To address this need, detailed posture and body shape data were measured from 300 soldiers with a wide range of body size at four levels of encumbrance: minimally clad, uniform, body armor with helmet, and fully encumbered as a rifleman or SAW gunner. Posture data were gathered in driver and crew mockups and a whole-body laser scanner was used to gather body shape data in a range of standing and seated postures. The data are being analyzed for application to a wide range of vehicle design and analysis problems, including the development of accurately dimensioned manikins for vehicle ergonomic assessment and space claim, the provision of detailed anthropometry for the development of an advanced blast dummy, and revision of current standards for military vehicle interior layout.
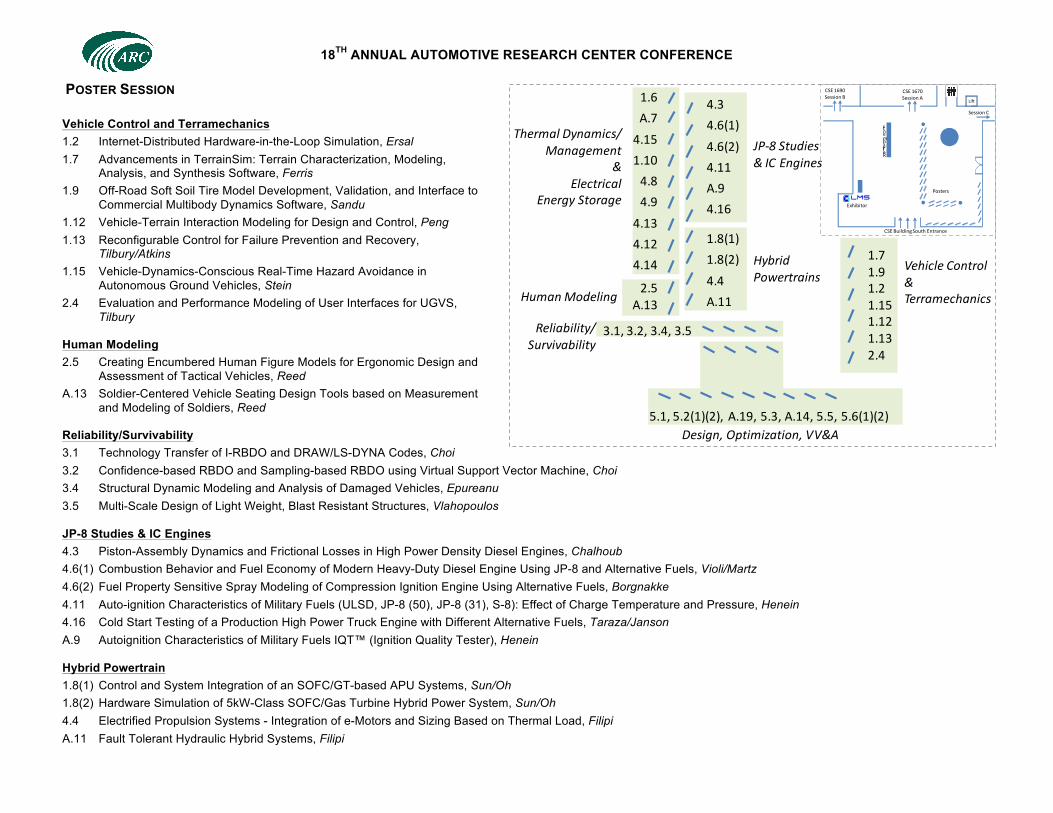
18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
Lift
CSE 1670Session A
CSE 1690Session B
Dow 1013Session C
Refreshments
CSE Building South Entrance
Posters
Exhibitor
Session C
Reliability/Survivability
Vehicle Control &Terramechanics
JP-‐8 Studies & IC Engines
Human Modeling
Thermal Dynamics/Management
& Electrical
Energy Storage
Design, Optimization, VV&A
1.71.91.21.151.121.132.4
4.3 4.6(1)4.6(2)4.11A.94.16
1.6A.74.151.104.84.9
4.134.124.14 Hybrid
Powertrains
1.8(1)1.8(2)4.4A.11
3.1, 3.2, 3.4, 3.5
5.1, 5.2(1)(2), A.19, 5.3, A.14, 5.5, 5.6(1)(2)
2.5A.13
POSTER SESSION Vehicle Control and Terramechanics 1.2 Internet-Distributed Hardware-in-the-Loop Simulation, Ersal 1.7 Advancements in TerrainSim: Terrain Characterization, Modeling,
Analysis, and Synthesis Software, Ferris 1.9 Off-Road Soft Soil Tire Model Development, Validation, and Interface to
Commercial Multibody Dynamics Software, Sandu 1.12 Vehicle-Terrain Interaction Modeling for Design and Control, Peng 1.13 Reconfigurable Control for Failure Prevention and Recovery,
Tilbury/Atkins 1.15 Vehicle-Dynamics-Conscious Real-Time Hazard Avoidance in
Autonomous Ground Vehicles, Stein 2.4 Evaluation and Performance Modeling of User Interfaces for UGVS,
Tilbury Human Modeling 2.5 Creating Encumbered Human Figure Models for Ergonomic Design and
Assessment of Tactical Vehicles, Reed A.13 Soldier-Centered Vehicle Seating Design Tools based on Measurement
and Modeling of Soldiers, Reed Reliability/Survivability 3.1 Technology Transfer of I-RBDO and DRAW/LS-DYNA Codes, Choi 3.2 Confidence-based RBDO and Sampling-based RBDO using Virtual Support Vector Machine, Choi 3.4 Structural Dynamic Modeling and Analysis of Damaged Vehicles, Epureanu 3.5 Multi-Scale Design of Light Weight, Blast Resistant Structures, Vlahopoulos JP-8 Studies & IC Engines 4.3 Piston-Assembly Dynamics and Frictional Losses in High Power Density Diesel Engines, Chalhoub 4.6(1) Combustion Behavior and Fuel Economy of Modern Heavy-Duty Diesel Engine Using JP-8 and Alternative Fuels, Violi/Martz 4.6(2) Fuel Property Sensitive Spray Modeling of Compression Ignition Engine Using Alternative Fuels, Borgnakke 4.11 Auto-ignition Characteristics of Military Fuels (ULSD, JP-8 (50), JP-8 (31), S-8): Effect of Charge Temperature and Pressure, Henein 4.16 Cold Start Testing of a Production High Power Truck Engine with Different Alternative Fuels, Taraza/Janson A.9 Autoignition Characteristics of Military Fuels IQT™ (Ignition Quality Tester), Henein Hybrid Powertrain 1.8(1) Control and System Integration of an SOFC/GT-based APU Systems, Sun/Oh 1.8(2) Hardware Simulation of 5kW-Class SOFC/Gas Turbine Hybrid Power System, Sun/Oh 4.4 Electrified Propulsion Systems - Integration of e-Motors and Sizing Based on Thermal Load, Filipi A.11 Fault Tolerant Hydraulic Hybrid Systems, Filipi

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
Lift
CSE 1670Session A
CSE 1690Session B
Dow 1013Session C
Refreshments
CSE Building South Entrance
Posters
Exhibitor
Session C
Reliability/Survivability
Vehicle Control &Terramechanics
JP-‐8 Studies & IC Engines
Human Modeling
Thermal Dynamics/Management
& Electrical
Energy Storage
Design, Optimization, VV&A
1.71.91.21.151.121.132.4
4.3 4.6(1)4.6(2)4.11A.94.16
1.6A.74.151.104.84.9
4.134.124.14 Hybrid
Powertrains
1.8(1)1.8(2)4.4A.11
3.1, 3.2, 3.4, 3.5
5.1, 5.2(1)(2), A.19, 5.3, A.14, 5.5, 5.6(1)(2)
2.5A.13
Thermal Dynamics/Management & Electrical Energy Storage 1.6 Neutron Imaging of Lithium Ion Batteries, Stefanopoulou/Siefel 1.10 Ultracapacitor Energy Storage for Improving Fuel Economy and Extending
Battery Life in Heavy Vehicles, Vahidi 4.8 High Energy Density Asymmetric Capacitors, Thompson 4.9 Thermoelectric and Vapor Compression Cooling for Hybrid Electric
Vehicles, Wagner 4.12 Computationally-Efficient Finite-Element-Based Thermal Models of
Electric Machines, Hofmann 4.13 Powertrain Thermal Management – Experimental Study of Battery Cooling
in Hybrid Electric Vehicles, Ma 4.14 Improved Density and Temperature Range of In-vehicle Power
Converters: High Frequency Power Supplies for High Temperature Environments, Rivas
4.15 Stability of Electro-Thermal Planar Dynamics in Large-format Prismatic Li-ion Battery Cells, Monroe
A.7 Parameterization and Validation of an Integrated Electro-Thermal Model for a Cylindrical LFP Battery, Stefanopoulou
Design, Optimization, VV&A 5.1 Validation of Models with Multivariate Functional Output,
Kokkolaras/Hulbert 5.2(1) Vehicle Structure and Seating Design for Minimizing Casualties,
Papalambros/Kokkolaras 5.2(2) HEV Powertrain Architecture Exploration Using Bond Graphs, Papalambros/Kokkolaras 5.3 Development and Laboratory Implementation of an Accelerated Testing Method for Vehicle Systems using Time-Dependent Reliability / Durability Principles, Mourelatos 5.5 Battery Thermal Packaging Design, Fadel/Wiecek 5.6(1) UGV System Reliability Modeling & Improvement: Mission Energy Prediction for UGVs by Real-time Measurements and Prior Knowledge, Ulsoy/Jin 5.6(2) UGV System Reliability Modeling & Improvement: Passive-Assist Device Optimization for Enhanced Joint Performance, Ulsoy/Jin A.14 Reliability Assessment and Optimization of a Smart Charging Microgrid, Mourelatos A.19 Crowdsourcing for Optimal Vehicle Design, Papalambros/Gonzales/Kokkolaras

UM Autolab Tour, May 21, 2012 at 3:15
ACCESS engine; transient
Quantitative Laser Diagnostics Lab
Hybrid Powertrain Laboratory
Low temperature partially premixed
diesel engine
Hydraulic valvetrain HCCI/SACI engine
EGR Heat Exchanger Deposits
ARC Heavy Duty Engine Laboratory: Fuels and Controls
Research
Scalable Battery Systems Lab
ARC Internet Distributed
Powertrain Controls
ACCESS engine; steady-state
GMCRL boosted HCCI engine
Gasoline DI Advanced
Combustion Engine
To Lurie
back
to
AR
C C
onfe
renc
e

UM Autolab Tour, May 21, 2012
• Hybrid Powertrain Laboratory; 1070 Autolab • Prof. Huei Peng • An education lab developed to support two courses: modeling and control
of hybrid electric vehicles, and internal combustion engines. The lab was designed to test small engines and electric machines and study their integration into hybrid powertrains through simulations
• Scalable Battery Systems lab; 1082 Autolab
• Prof. Anna Stefanopoulou, Dr. Jason Siegel • Electrothermal Battery Diagnostics, Dynamics and Management • Observability of Cell-to-Cell Imbalance in Battery Packs • Neutron Imaging for In-Situ Validation of Electrochemical Cell models
• ACCESS (Advanced Combustion Controls – Enabling Systems and Solutions) for
High Efficiency Light-Duty Vehicles, 1114 Autolab • Dr. Stani Bohac, Dr. Erik Hellstrom, Prof. Anna Stefanopoulou
Development of highly capable and flexible advanced combustion modes and control concepts to achieve at least 30% fuel economy improvement while meeting SULEV emissions in a commercially viable light-duty vehicle without compromising performance.
• Hydraulic valvetrain HCCI/SACI engine; 1122 Autolab
• Prof. Margaret Wooldridge, Dr. George Lavoie, Dr. Jason Martz • Investigate HCCI and SACI advanced combustion modes • Explore fuel effects on HCCI
• GMCRL boosted HCCI engine,1122 Autolab • Prof. Volker Sick, Dr. George Lavoie • Investigate HCCI under boosted conditions
• ACCESS (Advanced Combustion Controls – Enabling Systems and Solutions) for High Efficiency Light-Duty Vehicles, 1089/1095 (steady-state)
• Dr. Stani Bohac, Dr. Erik Hellstrom, Prof. Anna Stefanopoulou • Modeling and Control of Multi-Mode Combustion • Characterizing and Controlling High Cycle-to-Cycle Combustion Variability
• EGR Heat Exchanger Deposits, 1103 Autolab • Dr. John Hoard • Engine and visualization test stand for study of diesel EGR cooler fouling.
• ARC Heavy Duty Diesel Engine 1111/1105 Autolab
• Angela Violi, Jason Martz, Claus Borgnakke, John Hoard, Dohoy Jung • Combined simulation and experiments, focused on understanding the
chemical/physical causes of cetane number variation in JP-8, development of an improved JP-8 kinetic mechanism and chemical surrogate(s).
• DDC Onboard Diagnostics and Controls • Anna Stefanopoulou, Jeff Cook, Jason Martz • Real time controls for fuel variability with advanced sensing • Diagnostics and On-board Calibration of EGR Recirculation
• ARC Internet Distributed Powertrain Controls, 1103/1105 Autolab • Dr. Tulga Ersal • Internet-enabled framework to integrate geographically distributed
hardware-in-the-loop setups in real-time for concurrent, high-fidelity, systems-level engineering with application to powertrain controls
• Quantitative Laser Diagnostics Laboratory, 1123 Autolab
• Prof. Volker Sick, Dr. David Reuss • High-speed imaging for turbulence, misfire, and boundary layer studies,
Large-Eddy Simulation Working Group

18TH ANNUAL AUTOMOTIVE RESEARCH CENTER CONFERENCE
For your internet needs on campus MGuest is a limited WiFi network for University of Michigan guests.
To access:
• Connect to the MGuest WiFi network • Open a web browser; the MGuest welcome page will appear • Enter your email address and agree to terms to gain access
Key:
North Campus Map
Technical Symposia & Poster Session
Lift
CSE 1670Session A
CSE 1690Session B
Dow 1013Session C
Refre
shmen
ts
CSE Building South Entrance
Posters
Exhibitor