-
1
Hybrid-Beamforming-Based Millimeter-WaveCellular Network
Optimization
Jia Liu, Senior Member, IEEE, and Elizabeth S. Bentley, Member,
IEEE
Abstract—Massive MIMO and millimeter-wave communica-tion
(mmWave) have recently emerged as two key technologiesfor building
5G wireless networks and beyond. To reconcile theconflict between
the large antenna arrays and the limited amountof radio-frequency
(RF) chains in mmWave systems, the so-called hybrid beamforming
becomes a promising solution andhas received a great deal of
attention in recent years. However,existing research on hybrid
beamforming focused mostly on thephysical layer or signal
processing aspects. So far, there is alack of theoretical
understanding of how hybrid beamformingcould affect mmWave network
optimization. In this paper, weconsider the impacts of hybrid
beamforming on utility-optimalityand queueing delay in mmWave
cellular network optimization.Our contributions in this paper are
three-fold: i) we developa joint hybrid beamforming and congestion
control algorithmicframework for mmWave network utility
maximization; ii) wereveal a pseudoconvexity structure in the
hybrid beamformingscheduling problem, which leads to simplified
analog beamform-ing protocol design; and iii) we theoretically
characterize thescalings of utility-optimality and delay with
respect to channelstate information (CSI) accuracy in digital
beamforming.
I. INTRODUCTION
In recent years, millimeter wave communication (mmWave)has
emerged as a promising technology for building 5Gwireless networks
and beyond. The excitements of mmWavecommunications are primarily
due to: i) the rich unlicensedspectrum resources in 60 GHz bands;
ii) the ease of packinglarge antenna arrays into small form factors
(a consequence ofthe short wavelengths); and iii) a much simplified
interferencemanagement thanks to the highly directional
“pencil-beam-like” mmWave signals. Moreover, recent field tests
(see, e.g.,[1], [2], etc.) have shown that the large directivity
gainsof mmWave transceivers can offset the high
atmosphericattenuation in mmWave bands, dispelling the common
concernthat mmWave is not suitable for outdoor communications.
Thepotential of mmWave networks has also stimulated many
stan-dardization activities (e.g., IEEE 802.15.3 wireless
personal
Manuscript received May 22, 2019, revised September 10, 2019,
andaccepted October 4, 2019. This work is supported by NSF grants
ECCS-1818791, CCF-1758736, CNS-1758757, CNS-1446582; ONR grant
N00014-17-1-2417, and AFRL grant FA8750-18-1-0107. This paper was
presented inpart at IEEE/IFIP WiOpt, Paris, France, May 2017. Any
opinions, findingsand conclusions or recommendations expressed in
this material are those ofthe author(s) and do not necessarily
reflect the views of AFRL and ONR.
Jia Liu is with the Department of Computer Science, Iowa State
University,Ames, IA, 50011 USA (e-mail: [email protected]).
Elizabeth S. Bentley is with the Air Force Research Laboratory,
InformationDirectorate, Rome, NY, 13441 USA (e-mail:
[email protected]).
DISTRIBUTION STATEMENT A: Approved for Public Release;
distribu-tion unlimited 88ABW-2019-4902 on 09 October 2019. Other
requests shallbe referred to AFRL/RIT 525 Brooks Rd Rome, NY
13441.
Digital Object Identifier xx.xxxx/XXXX.xxxx.xxxxx.
area networks, 802.11ad wireless local area networks, and
fast-growing interests in mmWave cellular networks [3]).
However, the highly directional propagation of mmWavesignals and
the special mmWave hardware requirements alsointroduce several
unique technical challenges for networkingsystems. One major
problem in mmWave networking is itsvulnerability to blockage, which
is due to the weak diffractionability of mmWave communications [3],
[4]. Mitigating block-age in mobile cellular networks requires a
frequent search fornew unblocked directed spatial paths, which
entails a largecommunication overhead and complicates the
scheduling andcongestion control algorithmic designs at higher
layers. An-other main technical challenge is energy-efficient
beamformingarchitecture design, which lies at the heart of mmWave
direc-tional networking. Although large antenna arrays can be
easilydeployed in mmWave systems, the high power consumptionof
mixed mmWave signal components significantly limits thenumber of
radio-frequency chains (RF chains), rendering fulldigital
beamforming (requiring one RF chain per antenna)impractical [5].
Moreover, most of the digital beamformingschemes in traditional
MIMO systems require full chan-nel state information (CSI), which
is difficult to acquire inmmWave systems due to the fast fading in
mmWave spectrumand the low signal-to-noise ratio (SNR) before
beamforming[6]. Because of the RF chain limitations in mmWave
systems,analog beamforming approaches have been proposed (see,
e.g.,[7], [8]). The basic idea of analog beamforming is to
controlthe phase shifters of antenna elements, so that the energyof
the transmitted data stream is concentrated in a singledirection to
obtain a high directivity gain. Compared to digitalbeamforming,
analog beamforming can be achieved by onlyone RF chain without
requiring any CSI at the transmitter.However, analog beamforming
can only transmit in a singlebeam direction and cannot leverage any
spatial multiplexingcapability of the large mmWave antenna
array.
In light of the limitations of analog and digital beamform-ings,
there is a growing consensus that the more suitablearchitecture for
mmWave cellular networks is the hybridbeamforming architecture,
which exploits the large mmWaveantenna arrays and yet only requires
a limited number of RFchains [6], [9]–[12]. Hybrid beamforming
enjoys the best ofboth worlds: On one hand, it uses analog
beamforming to offerspatial division and directivity gains to
combat large mmWavechannel attenuations. On the other hand, digital
beamformingprovides multiplexing gains for the lower dimensional
effectivechannels, for which the CSI is relatively easier to
acquire.It has been shown in [6], [13] that hybrid
beamformingachieves a data rate performance comparable to full
digital
-
2
beamforming with 8 to 16 times fewer RF chains.So far, however,
the existing works on mmWave hybrid
beamforming are mostly concerned with problems at thephysical
layer or signal processing aspects. To date, thereremains a lack of
theoretical understanding on how hybridbeamforming could affect
mmWave networking performancesin terms of congestion control,
scheduling, and resourceoptimization algorithms. In this paper, our
goal is to fillthis gap by conducting an in-depth study on the
impacts ofhybrid beamforming on throughput and delay performancesin
mmWave cellular network optimization.
Specifically, in this paper, we focus on the algorithmicdesign
and the throughput-delay analysis for the
celebratedqueue-length-based congestion control and scheduling
frame-work (QCS) (see, e.g., [14], [15], and [16] for a survey)
inhybrid-beamforming-based mmWave cellular networks. Ourmain
results and technical contributions are as follows:
• We develop an accurate analytical model that captures
theessence of hybrid beamforming in mmWave cellular net-works,
while being tractable enough to enable network-levelunderstanding
and analysis. Based on this analytical model,we investigate the
problem of joint hybrid beamformingand congestion control for
network utility maximization.We show that the joint hybrid
beamforming and congestioncontrol optimization is non-convex by
nature, which createschallenges for the algorithmic designs in the
MaxWeightscheduling component in the QCS framework.• By exploiting
the special problem structure of the mmWaveMaxWeight scheduling
component, we show that the non-convex scheduling subproblem admits
a pseudoconvex ap-proximation under a wide range of hybrid
beamformingparameters of practical interests. Moreover, our
analysisreveals that, to solve the scheduling subproblem, one
onlyneeds to adjust the analog beamwidth at the base station(BS),
while the analog beamwidth adjustment at the mo-bile station (MS)
side is unnecessary. This insight greatlysimplifies the analog
beamforming training protocol design.• We investigate the impact of
CSI inaccuracy on networkperformance with hybrid beamforming, where
we assumethat the true CSI is quantized by Q bits. We reveal a pair
ofinteresting phase transition phenomena in utility-optimalityand
delay in the following sense: There exists a criticalvalue Q] such
that: i) if 0 < Q < Q], then the deviations ofsteady-state
queue-length grows linearly and the congestioncontrol rate is
bounded by a constant; ii) If Q ≥ Q], thedeviations of
queue-lengths and congestion control rateshave the same scaling
laws as in the full CSI case.
Collectively, these results not only deepen our
theoreticalunderstanding of mmWave network optimization with
hybridbeamforming, but also provide insights for
low-complexityanalog beam training and effective CSI quantization
in prac-tice. The remainder of this paper is organized as follows:
InSection III, we introduce network models and the
problemformulation. Section IV presents the mmWave
congestioncontrol and scheduling framework, as well as the
algorithmicdesign for analog beam training. Section V studies the
impactsof inaccurate CSI on digital beamforming. Section VI
provides
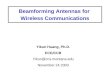
(a) (b)
Fig. 1. Traditional beamforming receiver architectures: (a)
Analog beam-forming using phase shifters along the signal path, and
(b) and conventionaldigital beamformer using a separate ADC for
each signal path.
numerical results and Section VII concludes this paper.
II. HYBRID BEAMFORMING: BACKGROUND ANDMOTIVATION
In this section, we provide a brief overview on the basicsand
the current state-of-knowledge related to MIMO beam-forming
techniques to further motivate the significance ofhybrid beamformng
for mmWave communications systems.Simply speaking, beamforming
(also known as spatial fil-tering) is the ability for an antenna
system to adaptivelyand electronically steer its beam along a
desired directionwhile suppressing the reception of potential
interferers fromother directions. Depending on the “level of
intelligence,”beamforming can be classified into two major
categories,namely digital and anlalog beamforming. Due to the
symmetry(with reversed signal paths) between transmitter and
receiverarchitecture, our discussions in this section are mostly
focusedon receiver design to avoid repetition. We note that most
ofthe characteristics of receiver beamforming techniques
applysimilarly to the transmitter side.
1) Analog Beamforming: The basic idea of analog beam-forming is
to control the phase shifters of all antenna elements,so that the
correlated transmitted and received signal energyis constructively
combined at some desirable direction. Amajor advantage of analog
beamforming at the RF front-endis the use of a single mixer to
perform frequency translation.As such, the combined RF signal is
down-converted to anintermediate frequency (IF) to be digitized by
a single ADCfor post-processing. This implies low energy
consumption.However, due to the limited phase tuning, analog phase
shifterscan only sense a single spatial direction at a time
[17].That is, beams from multiple directions cannot be
formedsimultaneously, limiting the capability of the
beamformer,particularly for MIMO applications. We note that this
problemwill be overcome by the hybrid beamforming architecture
inSection III. Also, phase shifters suffer from high losses
andbandwidth limitations. This is even more exacerbated for
largeantenna arrays as they require a large number of phase
shifters.As a result, traditional analog beamformers suffer from
largesize, weight, and complexity of the array, and not to
mentionpower consumption.
For wideband operations in mmWave, bandwidth limitationcan be
overcome by local oscillator (LO) phase-shifting, wherea tunable
oscillator is used to sweep the bandwidth [18].However, the demand
for fine phase resolution, necessary inreliable scanning, implies
extreme hardware complexity. In ad-dition, traditional analog
beamformers have other drawbacks.Among them are: i) beamforming
performance suffers fromquantized levels of phase increments, ii)
retraining of the phase
-
3
shifting network implies processing overhead and sacrificingdata
throughput, iii) have significant hardware complexity thatimpacts
size, power, and cost, and iv) do not accommodatespatial
multiplexing unless a hybrid architecture is used.
2) Digital Beamforming: The aforementioned pitfalls ofanalog
beamforming motivate the design of digital beamform-ing. For
wideband operations, digital beamforming approachesoffer more
flexibility [19], [20] since beamforming and relatedadaptive
algorithms are carried out at the back-end of thetransceiver using
FPGAs or other digital processing units. Indigital beamforming, the
RF signal is processed and digitizedprior to amplitude scaling and
phase shifting, as depicted inFig. 1(b). To perform beamforming,
the digitized basebandsignal yn is multiplied by a complex weight
wn for the n-thsignal path. Therefore, the output is yout =
∑n ynwn, where
the complex weight can be written as wn = aneφn .
Digitaladaptive beamformers can achieve more accurate main
beams,null steering, side lobes levels control, simultaneous
multi-directional beams, and spatial multiplexing. However,
existingdigital beamformers at baseband have extensive
hardwarerequirements as they employ separate ADCs for each
signalpath, as shown in Fig. 1(b). The large number of high-cost
andpower-hungry ADCs results in excessive power consumptionin the
back-end circuitry, making such approaches limited tosmall arrays.
Further, most digital beamforming techniques fortraditional MIMO
require the full knowledge of channel stateinformation (CSI), which
is difficult to acquire for the largeantenna array deployed in
mmWave platforms.
To address the limitations of analog and digital beamform-ing,
in the next section, we will introduce the analytic model ofthe
cellular hybrid beamforming architecture, which achievesthe best of
both worlds of analog and digital beamforming.
III. NETWORK MODEL AND PROBLEM FORMULATION
Notation: We use boldface to denote matrices/vectors. A†denotes
the conjugate transpose of A. We use ‖ · ‖ and ‖ · ‖1to denote `2-
and `1-norms, respectively. We let I denote theidentity matrix,
whose dimension is conformal to the context.We let R and C denote
real and complex spaces, respectively.
1) Hybrid-Beamforming-Based mmWave Downlink: Asshown in Fig. 2,
we consider a mmWave cellular downlinksystem with N users. The BS
and each user have MBS andMMS antennas, respectively. The mmWave
downlink adoptsa hybrid beamforming architecture with MBRF and
M
MRF RF
chains at the BS and each user’s MS, respectively (see Fig.
3).The system operates in a time-slotted mode. The time-slots
areindexed by t ∈ {0, 1, 2, . . .}. As shown in Fig. 4, each
time-slot is of period T and contains two phases. The first phase
isfurther divided into N mini-slots corresponding to the N
users.Each mini-slot contains two parts τAn and τ
Dn . In τ
An , both the
BS and a user n perform analog beam search to refresh theirbeam
directions to mitigate link breakage caused by user n’smovements
[3], [4]. In τDn , the BS estimates the CSI of user nfor digital
beamforming. In the data transmission phase, basedon the analog
beam and digital CSI training results, the BSpicks one of the N
users and steers analog beams to this user.Likewise, the scheduled
user also steers analog beams toward
...
...
......
...
qN [t]
q2[t]
q1[t]a1[t]
a2[t]
aN [t]
CongestionControl
Ant. 1
Ant. 2
Ant. 3
User 1
User 2
User N
Ant. MBS
sn[t]
MMS antennas per user
Scheduling
Decisions
CSI (Based on Feedback or Channel Reciprocity)
mmWave Cellular Base Station
Fig. 2. A mmWave cellular downlink with a MBS-antenna base
station andN MMS-antenna users.
...
...
...
...
...
......
...... .
..
......
......
RF Chain
RF ChainBaseband
(Digital
Beam-
forming)
MBRF Chains
MBSAntennas RF Chain
RF Chain
forming)
Baseband
(Digital
Beam-Antennas
MMS
Base Station User n’s Mobile Station
F(n)D [t]
RF analog RF analog
beamformer F(n)A [t] beamformer W
(n)A [t]
Beamformer BeamformerChannel Hn[t]
Actual
MMRF Chains
Effective
W(n)D [t]
Channel H(n)E [t]Streams
un[t]
xn[t]
Streams
yn[t]
K Data K Data
Fig. 3. Block diagram of a mmWave cellular network with hybrid
beamform-ing.
...Beam searching & CSI learning
τDτA1 τAN Data Transmission
TUser 1 User N
τD
Fig. 4. Frame structure of a time-slot in mmWave cellular
networks withhybrid beamforming.
the BS. Further, by leveraging the learned CSI to performspatial
multiplexing, the BS and a scheduled user communicatevia K data
streams. For mmWave systems in practice, weusually have: i) K ≤
MBRF ≤ MBS; ii) K ≤ MMRF ≤ MMS;iii) MMRF ≤MBRF; and iv) MMS
≤MBS.
a) Analog beamforming process: In time-slot t, the
analogbeamformers on the BS and user sides are determined bya beam
training process, during which the BS and user nsearch over all
possible direction combinations within theircorresponding sectors1,
as shown in Fig. 5 (this exhaustivebeam training process has been
adopted in IEEE 802.11ad andIEEE 802.15.3c standards). Let Tp
denote the time requiredfor transmitting and receiving a pilot
symbol. Let ψBn andψMn denote the sector-level beamwidth at the BS
and user n,respectively. Also, let θB [t] and θn[t] denote the
beam-levelbeamwidth at the BS and user n’s MS, respectively. Then,
thebeam search time τAn can be computed as: τ
An =
ψBnθB [t]
ψMnθn[t]
Tp.In this paper, we adopt a widely used sectored antenna
pattern model (see, e.g., [21]–[23]): We assume that the
gainsare a constant for all angles within the main lobe and equal
toa smaller constant in the side lobes. As shown in Fig. 5, we
letωBn and ω
Mn represent the angles deviating from the strongest
path between the BS and user n, respectively (the strongestpath
needs not be line-of-sight and Fig. 5 is only for
illustrativepurposes). Let gBn (ω
Bn , θB [t]) and g
Mn (ω
Mn , θn[t]) denote the
transmission and reception gains at the BS and user n. In
thispaper, we adopt the following widely used antenna radiation
1In this paper, we assume that both the BS and user know the
sectors of eachother’s location in each time-slot. This is a
reasonable assumption because thesector information can be inferred
with high accuracy from the beam directionin the previous time-slot
and the mobility/trajectory information of the user.
-
4
steering
Target
sector ψBn
Target
sector ψMn
BS Beamwidth θB[t] Beamwidth θn[t]
BS beam
steering
MS beamAngle fromAngle from
strongest path ωBn strongest path ωMn
User n
Fig. 5. The analog beamforming trainingprocedure.
Side lobegain η
Beamwidth θ[t]
Main lobe gain2π−(2π−θ[t])η
θ[t]
Fig. 6. The simplified antennaradiation pattern.
pattern model [21]–[23] (see Fig. 6):
gBn (ωBn , θB [t]) =
{2π−(2π−θB [t])η
θB [t], if |ωBn | ≤
θB [t]2 ,
η, otherwise,(1)
gMn (ωMn , θn[t]) =
{2π−(2π−θM [t])η
θn[t], if |ωMn | ≤
θn[t]2 ,
η, otherwise,(2)
where η ∈ [0, 1) is the side lobe gain. In practice, η � 1
fornarrow beams (i.e., θB [t] and θn[t] are small). This model
cap-tures the essential features of antenna patterns (e.g.,
directivegains, front-to-back ratio, half-power beamwidth, etc.
[23]).Once the optimal directions for transmission and
receptionhave been determined, the communication link can be
estab-lished, and data transmission phase starts. The beam
trainingis finished when the BS and the user’s beams are aligned
withthe strongest path, i.e., the conditions |ωBn | ≤
θB [t]2 in (1) and
|ωMn | ≤θn[t]
2 in (2) are satisfied.b) Digital beamforming process: Once the
analog beam
search is completed, the analog beamformers are known.Therefore,
we can estimate the CSI of the effective channelH
(n)E [t], which is assumed to take τ
D = βTp amount of time(cf. Fig. 4), where β > 0 is some
constant. With the learnedCSI, the BS and user n jointly choose
baseband beamform-ers based on some digital beamforming strategies,
such assingular value decomposition (SVD), zero-forcing (ZF),
etc.One particularly interesting case arises when MBRF �MMRF.In
this case, the row vectors in the effective channel H(n)E [t]are
asymptotically orthogonal to each other as MBRF gets large.Thanks
to this nice property, one can use the so-called conju-gate
beamforming, which has been shown to be
asymptoticallycapacity-achieving in the high SNR regime [24]. We
willfurther discuss conjugate beamforming in Section V.
Regardless the choice of digital beamforming schemes,the digital
beamforming process converts H(n)E [t] into K ≤min{MBRF,MMRF}
spatial channels (depending on the rank ofH
(n)E [t]). We let g
(k)n [t] denote the effective gain of the k-th
spatial channel. Based on the models of hybrid
analog/digitalbeamforming, we have that the hybrid beamforming
achiev-able rate of user n can be computed as:2
rn(θB [t], θn[t])=
(1− τ
A+NτD
T
) K∑k=1
log2
(1+
PmaxKN0
gBn (ωBn , θB [t])g
Mn (ω
Mn , θM [t])g
(k)n [t]
), (3)
2In this paper, equal power allocation is used for lower rate
evaluationcomplexity in the effective MIMO channel. This is because
it has been shownthat the rate loss of equal power allocation is
negligible under moderate andhigh SNR regimes. Also, equal power
allocation is asymptotically capacity-achieving in high SNR regime
[25].
where τA ,∑Nn=1 τ
An and Pmax denotes the maximum
transmission power at the BS. Then, for a given channel statein
time-slot t, we let Cn[t] denote the instantaneous achievablerate
region under a chosen digital beamforming scheme:
Cn[t] ,{rn(θB [t], θn[t])
∣∣∣∣ θB [t]∈(0, ψBn ],θM [t] ∈ (0, ψMn ]}. (4)
It can be seen from (3) that the beamwidths θB [t] and θn[t]need
to be chosen judiciously: On one hand, from (1) and (2),gBn (ω
Bn , θB [t]) and g
Mn (ω
Mn , θn[t]) increase as θB [t] and θn[t]
decrease, leading to a higher SNR and hence a higher datarate.
However, the smaller the beamwidths θB [t] and θn[t],the shorter
the transmission phase, i.e., there exists a trade-offbetween data
rate and transmission time.
2) Queueing Model: As shown in Fig. 2, the BS maintainsa
separate queue for each user. Let an[t] denote the numberof packets
injected into queue n in time-slot t. The arrivalprocesses {an[t]},
∀n, are controlled by a congestion con-troller. We assume that
there exists a finite constant Amax
such that an[t] ≤ Amax, ∀n, t. Let s[t] , [s1[t], . . . , sN
[t]]>denote the scheduled service rate vector in time-slot t
(thescheduling algorithm that determines s[t] will be presentedin
Section IV). Then, the queue-length of user n evolves as:qn[t + 1]
=
(qn[t] − sn[t] + an[t]
)+, ∀n, where (·)+ ,
max(0, ·). Let q[t] = [q1[t]], . . . , qN [t]]>. In this
paper, weadopt the following notion of queue-stability (same as in
[14],[15]): We say that a network is stable if the steady-state
totalqueue-length is finite, i.e., lim supt→∞ E {‖q[t]‖1} 0
controls the utility-optimality gap. Hence, the utility-optimality
gap can be madearbitrarily small by decreasing �. We note that the
queue-length-based congestion control mechanism is different andnot
to be confused with conventional TCP congestion con-trol mechanism.
Based on this insight, let us consider thefollowing QCS algorithm
specialized for hybrid beamformingin mmWave networks:
-
5
A. The QCS Algorithm Specialized for Hybrid Beamforming
Algorithm 1: Queue-Length-Based Joint Congestion Controland
Scheduling for mmWave-Based Cellular Networks.
Initialization: Choose parameters � > 0. Set t = 0.Main
Loop:1. MaxWeight Scheduler: In time t≥ 1, given queue-lengths
q[t] and CSI H[t], the scheduler chooses a service ratevector
s[t] from Cn[t] by hybrid beamforming such that:
s[t] = arg maxrn∈Cn[t],∀n
{ N∑n=1
qn[t]rn
}, (5)
where Cn[t] is defined in (4).2. Congestion Controller: Given
queue-lengths q[t], the con-
gestion controller chooses data injection rates an[t], ∀n,which
are integer-valued random variables satisfying:
E{an[t]|qn[t]} = min{U′−1n (�qn[t]) , A
max}, (6)
E{a2n[t]|qn[t]} ≤ Amax2 (x2 − x1) ≥ 0 implies f(x2) ≥ f(x1)or
equivalently ∇f(x2)>(x2 − x1) ≥ 0. The function f is said to
bepseudoconcave if −f is pseudoconvex.
-
6
methods); iii) It can be seen from the proof of Lemma 1that we
have defined θ̃[t] , θB [t]θM[t]. Note that the optimalobjective
value of Problem (10) is only a function of θ̃∗[t] anddoes not
depend on the specific values of θB [t] and θM[t], aslong as their
product is equal to θ̃∗[t]. This implies that wecan simply set
θM[t] to some appropriate fixed value and onlyadjust θB[t] at the
BS side. In other words, there is no need tojointly adjust θB[t]
and θM[t]. This insight greatly simplifiesthe protocol designs in
the analog beamforming phase.
Collectively, the results in this section provide an
algorith-mic solution to Problem JCS assuming that the CSI learned
inτD (hence the digital beamforming gains g(k)n [t]) is
accurate.However, it remains unclear how the network utility and
delayperformance of Algorithm 1 will be affected if the CSI
isinaccurate. This problem will be addressed in the next
section.
V. THE IMPACTS OF INACCURATE CSI ON THE QCSALGORITHM WITH HYBRID
BEAMFORMING
Generally speaking, in traditional multi-antenna networks,CSI is
measured at each MS based on pilot symbol training andthen fed back
to the BS. However, due to the short coherencetime of mmWave
channels (around an order of magnitudelower than that of microwave
bands since Doppler shifts scalelinearly with frequencies [3]),
this traditional CSI feedbackapproach is not suitable for
mmWave-based cellular networks.Another CSI acquisition method is to
have the system run intime-division duplexing (TDD) mode. Based on
the channelreciprocity, the uplink CSI measured at the BS will be
used fordownlink transmissions. However, the limited transmit
powerat the MSs and the lack of beamforming gains for the
uplinkpilot symbols limit the accuracy of TDD-based CSI
estimation.Further, the short coherence time of mmWave bands
impliesthat the channel reciprocity assumption is only valid for
low-mobility scenarios. Given these CSI estimation challenges
inmmWave cellular systems, it is likely that the CSI learnedduring
the τD period (cf. Fig. 4) is inaccurate.
In studying the impacts of CSI inaccuracy, we are interestedin
the case where the number of RF chains at the BS is muchgreater
than that at the MSs (e.g., 10 times larger). This settingis
particularly interesting because it is the relevant case formmWave
cellular networks in practice: First, as mentioned inSection I,
large antenna arrays can be easily deployed at theBS due to the
short wavelengths of mmWave bands. Also,because of the physical
size and power constraints, the MSsusually accommodate much fewer
RF chains compared to thatat the BS side. Moreover, as noted in
many studies [24], CSIacquisition is one of the most fundamental
limiting factorsin the system designs of large-scale antenna
cellular systems.In what follows, we start with the digital
beamforming foreffective mmWave channels with a large number of RF
chainsat the BS and its operations under a limited CSI model.
1) Digital Beamforming for Effective Channels: Asmentioned in
Section III, if MBRF � MMRF, due to thenear orthogonality between
the rows in the effective chan-nel in this case, the simple
conjugate digital beamformingtechnique from the Massive MIMO
literature and related
queueing network techniques [27], [28] can be adopted4.Recall
that the received signal of user n can be written as:y[t] = W
(n)†D [t]H
(n)E [t]F
(n)D [t]un[t] + ñ[t], where H
(n)E [t] ∈
CMMRF×MBRF is the effective channel by taking into accountthe
effects of analog beamforming; and F(n)D [t] and W
(n)†D [t]
are the transmit and receive digital beamformers,
respectively.Under conjugate beamforming, we have W(n)†D [t] = I
andF
(n)D [t] = H
(n)E [t]
†, i.e., the conjugate transpose of H(n)E [t].Also, we assume
that the effective channel H(n)E [t] is of fullrow rank so that we
can let K = MMRF (i.e., all receiver RFchains are utilized). Then,
the achievable rate under digitalconjugate beamforming can be
approximately computed as:
rn[t]≈(
1− τA+τD
T
) K∑k=1
log2
(1+
PmaxKN0
‖h(n)E,k[t]‖2), (11)
where h(n)E,k[t] denotes the k-th row of H(n)E [t]. In (11),
the approximation holds because the rows of H(n)E [t] arenearly
orthogonal as MBRF gets large. Note that in h
(n)E,k[t]
in (11), we have absorbed the array gains gBn (ωBn , θB [t])
and
gMn (ωMn , θn[t]) (cf. Eq. (3)) achieved by analog
beamforming.
2) CSI Inaccuracy Modeling: Given the inevitable CSIerrors and
to alleviate the CSI estimation burden for digitalbeamforming, we
adopt the limited CSI model in the literature(see, e.g., [25] and
references therein). Such limited CSI can beobtained by Q bits of
feedback from each user. Alternatively,based on the channel
reciprocity, the BS could use Q bits torapidly quantize the uplink
CSI (see Fig. 2). In either case, thevalue of Q depends on the CSI
learning time τD and efficiencyof the specific CSI learning
algorithm. The Q-bit limited CSIfor each RF chain k can be
determined by a vector quantizationcodebook Bk , {c1k, . . . ,
c2
Q
k }, where cik ∈ CMBRF , i =
1, . . . , 2Q, represents a codeword. Given an effective
channelH
(n)E [t], the codeword for its k-th row vector h
(n)E,k[t] is chosen
by picking the one that is closest to h(n)E,k[t] in the
followingsense [25]: i∗k[t] = arg minj∈{1,...,2Q} sin
2(∠(h(n)E,k[t], cjn)),
where i∗k[t] denotes the index of the chosen codeword in
time-slot t. Let Ĥ(n)E [t]∈CM
MRF×M
BRF denote the estimated channel
matrix by collecting all codewords i∗k[t], ∀k. Then, based
onĤ
(n)E [t], the BS performs conjugate beamforming to construct
K spatial channels. However, due to the errors in Ĥ(n)E
[t],inter-channel interference is not negligible under
conjugatebeamforming, and the amount of interference depends on
thecodebook size 2Q and the choice of the quantization scheme.
Let r̂Qn [t] denote the actual conjugate beamforming achiev-able
rate under the true CSI H(n)E [t] while the system istreating the
Q-bit limited CSI Ĥ(n)E [t] as if it is accurate. Also,let
Ĥ(n)E,1[t] and Ĥ
(n)E,2[t] represent two estimated CSI values
obtained by using Q1 and Q2 bits, respectively. Then, we canshow
that the following monotonicity result of the conjugate
4Due to this fact, the effective channel H(n)E [t] ∈ CMMRF×MBRF
under
hybrid beamforming is usually low-rank (MMRF and MBRF are the
numbers
of RF chains at MS and BS, respectively). However, as long as
H(n)E [t] isnot rank one (i.e., having two or more non-zero
singular values), then sinceMMRF �M
BRF under the large antenna array adopted in mmWave
transmitter
at the base station, then the rows in H(n)E [t] are close to
orthogonal to eachother from random matrix theory (see [29]).
-
7
beamforming achievable rate holds under limited CSI, whichwill
be used in our subsequent analysis (the proof is relegatedto [30]
due to space limitation):
Lemma 2 (Monotonicity of beamforming achievable rate). IfQ1 ≤
Q2, then there exists a CSI quantization scheme underwhich r̂Q1n
[t] ≤ r̂Q2n [t]. Further, r̂Qn [t] ↑ rn[t] as Q→∞.
3) Algorithmic Changes to the QCS Framework: Due tothe use of
Q-bit limited CSI in mmWave hybrid beamforming,we modify the QCS
algorithmic framework in Algorithm 1accordingly as follows:
Algorithm 2: Queue-Length-Based Congestion Control andScheduling
in mmWave Cellular Network with Q-Bit CSI.
Initialization: Choose parameters � > 0. Set t = 0.Main
Loop:1. MaxWeight Scheduler: In time-slot t ≥ 1, given the
queue-
length vector q[t] and the Q-bit estimated CSI Ĥ(n)E [t],∀n, we
let r̃n[t] be the presumed conjugate beamformingachievable rate
under Ĥ(n)E [t], ∀n. Then, the schedulerchooses a user n such that
n = arg maxn′∈{1,...,N}{qn′ [t]r̃n′ [t]}. Thus, the actual
achievable service rates aresQ,n[t] = r̂
Qn [t] and sQ,n′ [t] = 0, ∀n′ 6= n.
2. Congestion Controller: Same as in Algorithm 1.3. Queue-Length
Updates: Same as in Algorithm 1.
4) Performance Analysis: For better readability, we struc-ture
our performance analysis into the following key steps:
Step 1) A Deterministic Joint Congestion Control andScheduling
Problem: To describe our main theoretical results,we first need the
following deterministic problem, where weassume that the channel
state process is not random and fixedat its mean. We let C̄Q , {rQn
,∀n : rQn = E{r̂Qn [t]}} denotethe mean achievable rate region.
Also, the congestion controland scheduling variables are
time-invariant and denoted as anand sQ,n, ∀n, respectively. Then,
the deterministic congestioncontrol and scheduling problem can be
written as:
Maximize
1�N∑n=1
Un(an)
∣∣∣∣∣∣an − sQ,n ≤ 0,∀n,sQ,n ∈ C̄Q,∀n,an ∈ [0, amax], ∀n.
. (12)Based on the convex approximation argument in Theorem 1,it
is clear that Problem (12) is approximately convex. As-sociating
dual variables qQ,n ≥ 0, ∀n with the constraintsan − sQ,n ≤ 0, ∀n,
we obtain the Lagrangian as follows:
Θ�(qQ) , maxa,sQ∈C̄Q
{1
�
N∑n=1
Un(an)+
N∑n=1
qQ,n(sQ,n−an)
},
where the notation Θ�(·) signifies the Lagrangian’s depen-dence
on � and the vector qQ , [qQ,1, . . . , qQ,N ]> ∈ RN+contains
all dual variables. Then, the Lagrangian dual problemof Problem
(12) can be written as:
Minimize{
Θ�(qQ)∣∣qQ ∈ RN+ } . (13)
It can be seen that since Problem (13) is unconstrained,
theSlater condition [26] trivially holds if the primal problem
isfeasible. Therefore, the optimal value of Problem (12) can be
obtained by solving the dual problem in (13) since the
primalproblem is approximately convex. Let (a∗Q, s
∗Q) and q
∗Q,(�) be
the optimal primal and dual solutions to Problem (12) andProblem
(13), respectively. Then, it can be shown that q∗Q,(�)satisfies the
following properties:
Lemma 3 (Dual solution). q∗Q,(�) =1�q∗Q,(1), i.e., q
∗Q,(�)
grows linearly and the slope depends on q∗Q,(1). Further, ifQ1 ≤
Q2, then the slopes satisfy q∗Q1,(1) ≥ q
∗Q2,(1)
.
Lemma 3 can be proved by using the Karush-Kuhn-Tucker(KKT)
conditions [26] (the proof is relegated to [30] due tospace
limitation). Also, note that � is only a scaling factor inthe
objective function in (12). Then, by contradiction, we canshow the
following result (see [30] for proof details):
Lemma 4 (Primal solution). The congestion control solutiona∗Q is
independent of � and equal to the service rate s
∗Q.
With the results of the deterministic problem, we are in
aposition to analyze the delay and congestion control perfor-mance
of the original stochastic problem.
Step 2) Delay Performance of the Original Stochastic Prob-lem:
With Lemmas 3 and 4, we are now ready to present themain results in
this section. Our first result says that the steady-state
queue-length vector q∞ lies in a bounded neighborhoodof the dual
solution q∗Q,(�) of Problem (13). Further, the sizeof the
neighborhood manifests a phase-transition phenomenon(see proof
details in Appendix C).
Theorem 2 (Queueing delay phase transition). Under Algo-rithm 2
with any given Q-bit CSI quantization scheme, thereexists a
critical value Q] independent of the performancecontrol parameter �
of Algorithm 2, such that:
• If 0 < Q < Q], then E{‖q∞ − q∗Q,(�)‖} = O(C(Q)1� ),
where C(Q) ≥ 0 is a constant depending on the quantiza-tion
codebook, and C(Q) decreases as Q increases;
• If Q ≥ Q], then E{‖q∞ − q∗Q,(�)‖} = O(1/√�).
Remark 2. Theorem 2 and Lemma 3 characterize the steady-state
queue-length scalings: If Q is larger than the critical valueQ],
the steady state queue-length deviation grows sublinearly,which is
much slower compared to the linear growth whenQ ≤ Q]. Also, the
slope of mean queue-length q∗Q,(�) dependson Q: the smaller the
value of Q (i.e., poorer CSI accuracy),the steeper the slope. Note
that the O(1/
√�)-scaling of queue-
length deviation when Q ≥ Q] is the same as that under thefull
CSI case [15]. This shows a somewhat unexpected insightthat full
CSI is not necessary to produce (in order sense) theoriginal QCS
queue-length scaling behavior.
Step 3) Congestion Control Performance of theOriginal Stochastic
Problem: Now, let a∞Q,n ,E{min{U ′−1n (�q∞n ), amax}}, ∀n, be the
steady-statecongestion control rates under a given Q-bit CSI
quantizationscheme and let a∞Q , [a
∞Q,1, . . . , a
∞Q,N ]
>. The next mainresult characterizes the phase transition of
the scaling ofa∞Q ’s deviation from the solution a
∗Q of Problem (12) (see
Appendix D for proof details):
-
8
0.1 0.2 0.3 0.4 0.5 0.6
θ̃n[t] (normalized by π)
0
5
10
15
20
25
30
35
Achievable
rate
rn[t](bits/sec/Hz)
Approximation
η = 0.1
η = 0.2
η = 0.3
η = 0.4
η = 0.5
(a) Tp/T = 0.01.
0.1 0.2 0.3 0.4 0.5 0.6
θ̃n[t] (normalized by π)
0
5
10
15
20
25
30
35
40
45
Achievable
rate
rn[t](bits/sec/Hz)
Approximation
η = 0.1
η = 0.2η = 0.3
η = 0.4
η = 0.5
(b) Tp/T = 0.001.Fig. 7. The approximation gaps of Problem (10)
under different analog slidelobe gains η.
200 400 600 800 1000
5
10
15
20
25
30
35
(a) SNR = 20 dB.
200 400 600 800 1000
5
10
15
20
25
30
35
(b) SNR = 30 dB.Fig. 8. Average queue-length deviation with
respect to 1/� for Q =1, 2, 4, 8, 16, 32, 48, 64 bits (MBRF =
80).
200 400 600 800 1000
5
10
15
20
25
30
35
(a) SNR = 20 dB.
200 400 600 800 1000
5
10
15
20
25
30
35
(b) SNR = 30 dB.Fig. 9. Average queue-length deviation with
respect to 1/� for Q =1, 2, 4, 8, 16, 32, 48, 64 bits (MBRF =
90).
Theorem 3 (Congestion control phase transition). UnderAlgorithm
2 with any Q-bit CSI quantization scheme, thereexists a critical
value Q], same as in Theorem 2, such that:• If 0 < Q < Q],
then ‖a∞Q −a∗Q‖ = O(C(Q)), where C(Q) ≥
0 is the same constant as defined in Theorem 2;• If Q ≥ Q], then
‖a∞Q − a∗Q‖ = O(
√�).
Remark 3. Theorem 3 also indicates a phase transition fora∞Q :
When Q < Q
], the performance control parameter �of Algorithm 2 has no
effect on the deviation ‖a∞Q −a∗Q‖.However, when Q ≥ Q], a∞Q ’s
deviation from a∗Q grows asO(√�), which is the same as the full CSI
case [14], [15].
Another way to interpret this phase transition phenomenonis that
Q] represents the minimum codebook size for a CSIquantization
scheme, such that it can resurrect the performancetuning capability
of parameter � in the QCS algorithm. BothTheorems 2 and 3 can be
proved by Lyapunov stabilityanalysis, and the details are relegated
to the appendix.
VI. NUMERICAL RESULTSIn this section, we conduct simulations to
demonstrate the
theoretical results in Sections IV and V. We first verify
the
30 40 50 60 70 80 90 100
2
3
4
5
6
7
(a) SNR = 20 dB.
40 50 60 70 80 90 100
2
3
4
5
6
7
8
(b) SNR = 30 dB.Fig. 10. The congestion control rates with
respect to 1/� for Q =1, 2, 4, 8, 16, 32, 48, 64 bits. (MBRF =
80).
50 60 70 80 90 100
2
4
6
8
10
(a) SNR = 20 dB.
50 60 70 80 90 100
2
4
6
8
10
(b) SNR = 30 dB.Fig. 11. The congestion control rates with
respect to 1/� for Q =1, 2, 4, 8, 16, 32, 48, 64 bits. (MBRF =
90).
200 400 600 800 1000
5
10
15
20
25
30
35
40
45
50
(a) SNR = 40 dB.
40 50 60 70 80 90 100
0
2
4
6
8
10
(b) SNR = 20 dB.Fig. 12. The queue-length deviation and
congestion control rates with respectto 1/� for Q = 1, 2, 4, 8, 16,
32, 48, 64 bits. (MBRF = 100, 10 users).
approximation accuracy and the pseudoconvexity of Prob-lem (10).
We set SNR to 30 dB and set the Tp/T ratios to0.01 and 0.001. We
vary the side lobe gain η from 0.1 to 0.5and the results are shown
in Figs. 7(a) and 7(b). We can seethat, under both Tp/T ratios, the
approximation gaps shrinksas η decreases. In these examples, the
gaps under η = 0.1 arealmost negligible. Moreover, we note that the
approximationfunction is indeed pseudoconcave, as predicted by
Theorem 1.
Next, we examine the impacts of CSI quality, characterizedby the
number of quantization bits Q, on the queue-lengths andthe results
are shown in Figs. 8 to 11. The number of users isset to five. In
Figs. 8(a) and 8(b), we suppose that the BS andeach MS have 80 and
2 RF chains, respectively, and we setthe total SNR to be 20 dB and
30 dB, respectively. We uselog(·) as the utility function for each
user (i.e., the proportionalfairness metric [16]) and adopt random
vector quantization(RVQ) as our Q-bit CSI quantization codebook
[25]. We setthe value of Q to be 1, 2, 4, 8, 16, 32, 48, and 64. We
alsodraw an accompanying dash line to show the scaling trend ofeach
curve in Fig. 8(a). For small Q values, we can see that themean
queue-length deviation increases faster than the square
-
9
root law, roughly displaying a linear scaling with respect to�
as indicated in Theorem 2. For this example, the criticalvalue of Q
turns out to be 8. Once Q ≥ 8, the queue-lengthdeviations scale as
O(1/
√�), also confirming Theorem 2. In
Figs. 9(a) and 9(b), we increase the number of RF chains atthe
BS to 90 and run the experiments under total SNR 20 dBand 30 dB
again, respectively. Compared to Fig. 8, we cansee that the same
trends still hold under larger number of RFchains and the
queue-length deviation is slightly smaller. Thisshows that the
system delay performance is mostly limitedby the number of RF
chains at the MSs, hence the minorimprovements. Also, when SNR is
increased from 20 dB to30 dB, we can see that the queue-deviation
(i.e., delay) slightlydecreases.
In Figs. 10(a) and 10(b), we study the impacts of Q-bit CSIon
the congestion control rates. In Figs. 10(a) and 10(b), wesuppose
that the BS and each MS have 80 and 2 RF chains,respectively, and
we set the total SNR to be 20 dB and 30dB, respectively. For small
Q values, we can see that a∞Q isonly affected by Q and is a
constant independent of �. Also,a∞Q ’s gap to the full CSI case
shrinks as Q increases, whichconfirms Lemma 4 and Theorem 3. Again,
we can observethat the critical value of Q is 8: When Q ≥ 8, a∞Q
displays anO(√�) diminishing gap to a∗Q, which agrees with Theorem
3.
In Figs. 11(a) and 11(b), we increase the number of RF chainsat
the BS to 90 and run the experiments under total SNR20 dB and 30 dB
again, respectively. Again, compared toFig. 10, we can see that the
same trends still hold underlarger number of RF chains and the
queue-length deviation isslightly smaller. This shows that the
system delay performanceis mostly limited by the number of RF
chains at the MSs,hence the minor improvements. Also, when SNR is
increasedfrom 20 dB to 30 dB, we can see that the congestion
controlrate increases, which is due to the increase of channel
capacity.
Lastly, we change the number of users to ten and repeatthe same
set of experiments as in Figs. 8 to 11, and theresults are
illustrated in Figs. 12(a) and 12(b). We can seefrom Figs. 12(a)
and 12(b) that the same trends of queue-length deviation and
congestion control rates continue to holdunder the setting with 10
users. In Fig. 12(a), the queue-length deviation is larger compared
to the settings with fiveusers when Q is small, which shows that
delay performance ismore sensitive to CSI quality as the number of
users increasesunder mmWave hybrid beamforming. This is mainly due
to thefact that under hybrid-beamforming, as the number of
usersincreases, the duration of digital beamforming decreases asthe
number of users increases, hence smaller service ratescompared to
settings with fewer users. In Fig. 12(b), thecongestion control
rates (i.e., system throughput) is smallercompared to settings with
five users when Q is small, whichshows that the throughput
performance is also more sensitiveto CSI quality as the number of
users increases under mmWavehybrid beamforming.
VII. CONCLUSION
In this paper, we studied the impacts of hybrid beamformingon
the delay and network utility performance in mmWave
cellular network optimization. We proposed a queue-length-based
hybrid beamforming scheduling and congestion controlframework for
mmWave network utility maximization. We firstshowed that the hybrid
beamforming scheduling subproblemin this framework enjoys a hidden
pseudoconvexity structure,which leads to simplified analog beam
training design. We thencharacterized two phase transition
phenomena in throughputand delay with respect to CSI accuracy in
digital beam-forming. Collectively, these results deepen our
understandingof mmWave networking performances. Hybrid
beamformingin mmWave networking is an exciting and
under-exploredresearch area. Our future directions include, e.g.,
multi-cellmmWave networks with hybrid beamforming, the impacts
ofCSI inaccuracy on limited RF chains at the BS side, etc.
APPENDIX APROOF OF LEMMA 1
For simplicity, we let rn[t] denote the objective functionof
Problem (9). Substituting (1) and (2) into rn[t] and usingthe
defined constants, we can rewrite the objective function ofProblem
(9) as:
rn[t] =
(b0 −
b1θB [t]θM[t]
) K∑k=1
log2
(1+
2π − (2π − θB [t])ηθB [t]
· 2π − (2π − θM[t])ηθM[t]︸ ︷︷ ︸
(∆)
c(k)n
). (14)
Note that the term (∆) can be further written as:
(∆) =
(2π(1− η)θB [t]
+ η
)(2π(1− η)θM[t]
+ η
)(a)=
(4π2(1− η)2
θ̃[t]+
2π(1− η)(θB [t] + θM[t])θ̃[t]
+ η2),
where in (a) we define θ̃[t] , θB [t]θM[t]. Now, we claim
that
4π2(1− η)2
θ̃[t]� 2π(1− η)(θB [t] + θM[t])
θ̃[t]η (15)
is true if η� 13 . To see this, we first note that η�13
implies
4π� 2π(1−η)η . Also, since θB [t], θM[t]∈(0, 2π], we have
θB [t] + θM[t] ≤ 4π �2π(1− η)
η,
which implies that (15) is true. Hence, it follows from (15)and
η � 13 < 1 that (∆) ≈ (
4π2
θ̃[t]+ η2), which further implies
rn[t] = (14) ≈(b0 −
b1
θ̃[t]
) K∑k=1
log2
(1 +
4π2c(k)n
θ̃[t]
),
i.e., the objective function in (10). This completes the
proof.
APPENDIX BPROOF OF THEOREM 1
As mentioned earlier, verifying the pseudoconvexity ofProblem
(10) means verifying the pseudoconcavity of theobjective function.
Toward this end, we let f(θ̃[t]) denote the
-
10
negative objective function and our goal is to show that
f(θ̃[t])is pseudoconvex, which means that for any θ̃1[t] and θ̃2[t]
inthe feasible interval, iff ′(θ̃1[t])(θ̃2[t] − θ̃1[t]) ≥ 0, we
mustalso have f ′(θ̃2[t])(θ̃2[t]− θ̃1[t]) ≥ 0.
First, let us consider the case where θ̃2[t] ≥ θ̃1[t].
Then,showing f ′(θ̃2[t])(θ̃2[t] − θ̃1[t]) ≥ 0 is equivalent to
show-ing f ′(θ̃2[t]) ≥ 0. Note that, in this case, the conditionf
′(θ̃1[t])(θ̃2[t]− θ̃1[t]) ≥ 0 simply means f ′(θ̃1[t]) ≥ 0,
i.e.,
f ′(θ̃1[t]) =
K∑k=1
1
θ̃21
[4π2c
(k)n
ln(2)· b0θ̃1[t]− b1θ̃1[t] + 4π2c
(k)n︸ ︷︷ ︸
(P1)
−
b1 log2
(1 +
4π2c(k)n
θ̃1[t]
)︸ ︷︷ ︸
(P2)
]≥ 0. (16)
It is obvious that the term (P2) is an increasing function
ofθ̃[t]. Now, consider the fractional term b0θ̃1[t]−b1
θ̃1[t]+4π2c(k)n
in (P1),which is negative-valued according to the definitions of
b0, b1,and the feasible interval. Also, from the definition of b0,
wehave b0 < 1, implying that the absolute value of the
nominatoris increasing at a slower rate than that of the
denominator. Thismeans that (P1) is also an increasing function of
θ̃[t]. Hence,f ′(θ̃[t]) is increasing since both (P1) and (P2) are
increasing.As a result, f ′(θ̃1[t]) ≥ 0 and θ̃2[t] ≥ θ̃1[t] imply f
′(θ̃2[t]) ≥ 0and thus the case of θ̃2[t] ≥ θ̃1[t] is proved. The
other casewhere θ̃2[t] ≤ θ̃1[t] can also be proved by similar
argumentsand we omit the details in here for brevity.
To show that the optimal solution is unique and achievedin the
interior of the feasible interval, it suffices to showthat
∂rn[t]
∂θ̃[t]’s values at two end points of the interval have
opposite signs. Then, from the decreasing derivative propertyof
rn[t] (rn[t] = −f(θ̃[t])), ∂rn[t]∂θ̃[t] must have exactly one
zero-crossing point in the interior of the feasible interval. Also,
thepseudoconcavity of rn[t] means that the zero-crossing point
isthe global maximum. First, if θ̃[t] = b1b0 , we have (P1) =
0.Hence, ∂rn[t]
∂θ̃[t]> 0 since −(P2) > 0 (because b1, θ̃2[t], and
the log(·) rate expressions are positive). On the other
hand,when θ̃[t] ↑ ψBnψMn , it follows from Tp � T that
rn[t] =
[1−
(Nβ +
∑Nn′=1 ψ
Bn′ψ
Mn′
ψBnψMn
)TpT
]×
K∑k=1
log2
(1 +
4π2c(k)n
θ̃[t]
)
≈K∑k=1
log2
(1 +
4π2c(k)n
θ̃[t]
),
which is decreasing in θ̃[t] and must have a negative
derivativeat θ̃[t] = ψBnψ
Mn . This completes the proof.
APPENDIX CPROOF OF THEOREM 2
To prove Theorem 2, we first show the existence of steady-state
by proving a positive Harris-recurrence result of the
queue-length process. This result implies the existence
ofsteady-state, which lays the foundation for proving Theo-rems 2.
We let 1A(x) denote the indicator function, whichtakes value 1 if x
∈ A and 0 otherwise. We state the queue-length positive
Harris-recurrence result as follows:
Proposition 1 (Queue-Length Positive Recurrence). Considera
Lyapunov function V (q[t]) , �2‖q[t]− q
∗Q,(�)‖
2 for a given�. For the scheduler (5) and congestion controller
(6)–(7),there exist constants δ, η > 0, both independent of �,
suchthat the queue-length process {q[t]}∞t=0 satisfies the
followingconditional mean drift condition:
E{∆V (q[t]|q[t])} , E{V (q[t+ 1])− V (q[t])|q[t]}
≤ −�δΦ
∥∥q[t]− q∗Q,(�)∥∥1Qc(q[t]) + η1Q(q[t]), (17)where Q , {q ∈ ZN+
|‖q− q∗Q,(�)‖ ≤ γ/�} for some constantγ > 0 and Bc denotes the
complement of Q in ZN+ .
Proof. Consider the quadratic Lyapunov function defined
inProposition 1: V (q[t]) = �2‖q[t]−q
∗Q,(�)‖
2, where q[t] repre-sents the queue-length vector in time-slot t
under parameters� and Q; and q∗Q,(�) denotes the optimal dual
solution for thestatic version of Problem JCS under parameter �.
Then, theone-slot mean Lyapunov drift of V (q[t]) can computed
as:
E{V (q[t+ 1])− V (q[t])|q[t]}
= E{ �
2‖q[t+ 1]− q∗(�)‖
2 − �2‖q[t]− q∗Q,(�)‖
2∣∣∣q[t]}
=�
2E{
(q[t+ 1]− q[t])>(q[t+ 1] + q[t]− 2q∗Q,(�))∣∣∣q[t]}
(a)
≤ �2E{
(−sQ[t]+a[t])>(2q[t]−2q∗Q,(�)−sQ[t]+a[t])∣∣∣q[t]}
=�
2E{−sQ[t]+a[t]‖2+2(q[t]−q∗Q,(�))
>(−sQ[t]+a[t])∣∣∣q[t]}
= �(q[t]−q∗Q,(�))>(−sQ[t]+a[t])+
�
2E{‖ − sQ[t]+a[t]‖2
},
where (a) follows from the non-expansive property of themax{0,
·} operation. Note that, from the definition of Al-gorithm 1, we
have E{‖a[t]‖2|q[t]} < Amax2 N . Also, sincesQ,n[t] falls in a
bounded instantaneous capacity region CĤ[t],∀n, we must have
sQ,n[t] ≤ smax for some smax > 0. Hence,by defining D0 , N2
(A
max2 + (s
max)2), we have
E {∆V (q[t])|q[t]} ≤ �(q[t]− q∗Q,(�))>E {a[t]− sQ[t]}+�D0
(a)= �(q[t]− q∗Q,(�))
>(E{a[t]|q[t]} − s∗Q)+�E{(q[t]− q∗Q,(�))
>(s∗Q − sQ[t])|q[t]}+ �D0,(b)
≤ �(q[t]− q∗Q,(�))>(E{a[t]|q[t]} − s∗Q)+
�‖q[t]− q∗Q,(�)‖E{‖s∗Q − sQ[t]‖|q[t]
}+ �D0, (18)
where s∗Q is such that (s∗Q,q
∗Q,(�)) is a pair of optimal primal
and dual solutions to Problem (13) under parameter �. In(18),
(a) follows from adding and subtracting s∗Q as wellas the fact that
a[t] is independent of the channel state anddetermined solely by
q[t]; and (b) follows from Cauchy-Schwarz inequality.
-
11
Note from Lemma 4 that s∗Q is independent of � andsQ,n[t] ∈
CĤ[t] is upper-bounded. Thus, we have
E{‖s∗Q−sQ[t]‖|q[t]
}≤C(Q), max
q:‖q‖=1E{‖s∗Q−sQ‖q}, (19)
where C(Q) signifies that its value depends on Q. Hence, wecan
further upper bound (18) as:
E {∆V (q[t])|q[t]} ≤ �(q[t]− q∗Q,(�))>×
(E{a[t]|q[t]} − s∗Q) + �‖q[t]− q∗Q,(�)‖C(Q) + �D0, (20)
Now, let us consider the first term on the right hand side
in(20), i.e., �(q[t]−q∗Q,(�))
>(E{a[t]|q[t]}− s∗). Since Un(·) isconcave and increasing,
∀n, we have(qn[t]− q∗Q,(�),n
)> [U′−1n (�qn[t])− U
′−1n
(�q∗Q,(�),n
)]≤ 0.
Thus, by the Cauchy-Schwatz inequality, we have:
(q[t]− q∗Q,(�))>(E{a[t]|q[t]} − s∗Q)
=
N∑n=1
(qn[t]−q∗Q,(�),n
)> [U′−1n (�qn[t])−U
′−1n
(�q∗Q,(�),n
)]≤−
N∑n=1
∣∣qn[t]−q∗Q,(�),n∣∣∣∣∣U ′−1n (�qn[t])−U ′−1n
(�q∗Q,(�),n)∣∣∣.(21)By the strong convexity of −Un(·) and the
Lipschitz continuityof U ′n(·), we have
|U ′n (an,1)− U ′n (an,2)| ≤ Φ |an,1 − an,2| .
Therefore, by the inverse function lemma, we have
1
Φ
∣∣∣�qn[t]− �q∗Q,(�),n∣∣∣ ≤ ∣∣∣U ′−1n (�qn[t])− U ′−1n
(�q∗Q,(�),n)∣∣∣ .Hence, we can further upper-bound (21) as:
(q[t]− q∗Q,(�))>(E{a[t]|q[t]} − s∗Q)
≤ − �Φ
N∑n=1
(qn[t]−q∗Q,(�),n
)2=− 1
Φ�
∥∥∥q[t]−q∗Q,(�)∥∥∥2 . (22)Substituting (22) into (20), we
have
E {∆V (q[t])|q[t]} ≤ − �2
Φ
∥∥∥q[t]− q∗Q,(�)∥∥∥2+�‖q[t]−q∗Q,(�)‖C(Q)+�D0. (23)
Now, suppose that∥∥q[t] − q∗Q,(�)∥∥ ≥ γ1/�, where β1 will
be specified shortly. Note also that we can choose � ≥ 1,
wehave
1
‖q[t]− q∗Q,(�)‖≤ �γ1≤ 1γ1.
It then follows that (23) can be further upper bounded as:
E{∆V (q[t])|q[t]} = − �Φ
∥∥q[t]− q∗Q,(�)∥∥ · �∥∥q[t]− q∗Q,(�)∥∥+ �‖q[t]− q∗Q,(�)‖D1 +
∥∥q[t]− q∗Q,(�)∥∥ �D0∥∥q[t]−q∗Q,(�)∥∥≤ − �
Φ
∥∥q[t]− q∗Q,(�)∥∥(γ1 − C(Q)Φ− D0Φγ1). (24)
By choosing γ1 such that γ1 −D1Φ− D0Φγ1 > 0, we have
E{∆V (q[t])|q[t]} ≤ −�δ̂1Φ
∥∥q[t]− q∗Q,(�)∥∥ (25)where δ̂1 = γ1−C(Q)Φ−D0Φγ1 . Solving
β1−C(Q)Φ−
D0Φβ1
= 0
and plugging in the obtained γ1 to define a ball B1 , {q
:∥∥q−q∗Q,(�)∥∥ ≤ 12� [(C(Q)Φ)+√(C(Q)Φ)2 + 4D0Φ]}, we haveE{∆V
(q[t])|q[t]}≤−�δ1
∥∥q[t]−q∗Q,(�)∥∥, if q[t] ∈ Bc1, (26)where δ1 , δ̂1Φ . On the
other hand, when q[t] ∈ B1, it isclearly true that E{∆V
(q[t])|q[t]} ≤ η1 for some η1 > 0.Combining these facts yields
the following:
E{∆V (q[t])|q[t]=q}≤−�δ1‖q−q∗Q,(�)‖1Bc1(q)+η11B1(q).
This completes the proof of Proposition 1.
The inequality in (17) suggests that the conditional meandrift
is negative when the deviation of the queue-length vectorq[t] away
from q∗Q,(�) is sufficiently large. Since (17) is just
theFoster-Lyapunov criterion [31, Proposition I.5.3], {q[t]}∞t=0
ispositive recurrent, we have that a steady-state distribution
ofqueue-lengths exists. Thus, we let q∞ denote the
queue-lengthvector in steady-state. With Proposition 1, we are now
in aposition to prove Theorem 2.
Next, to prove Theorem 2, we use an α-parameterizedquadratic
Lyapunov function: Vα(q[t]) = �
α
2 ‖q[t]− q∗Q,(�)‖
2,where the parameter α ∈ {0, 1} and its value will be
specifiedlater. Following similar steps in the proof of Proposition
1, wecan bound the conditional mean Lyapunov drift as follows:
E{Vα(q[t+ 1])− Vα(q[t])|q[t]}(a)
≤ �α(q[t]− q∗Q,(�))>(E{a[t]|q[t]} − s∗Q)+
�αE{(q[t]− q∗Q,(�))>(s∗Q − sQ[t])|q[t]}+ �αD0,
(b)
≤ �α[− �
Φ
∥∥q[t]− q∗Q,(�)∥∥2 +D0]+�αE
{(q[t]− q∗Q,(�))
>(s∗Q − sQ[t])∣∣q[t]}
(c)
≤ �α[− �
Φ
∥∥q[t]− q∗Q,(�)∥∥2 +D0]+�αE
{(q[t])>(s∗ − sQ[t])
∣∣q[t]}, (27)where D0 , N2 (A
max2 + (s
max)2) and s∗ , limQ→∞ s∗Q. In(27), (a) follows from adding and
subtracting s∗Q; (b) followsfrom (22); and (c) follows from s∗Q ≤
s∗ (by Lemma 2)and the scheduler design, which implies
(q∗Q,(K))
>sQ[t] ≤(q∗Q,(K))
>s∗Q. Next, consider the T -step conditional meanLyapunov
drift. For any q[0] ≥ 0, we have that
E{Vα(q[T ])|q[0]} − Vα(q[0])
=
T−1∑t=0
E{V (q[t+ 1])− V (q[t])|q[0]}
(a)=
T−1∑t=0
∑q∈ZN+
[Pr(q[t] = q|q[0])
E{Vα(q[t+ 1])− Vα(q[t])|q[t] = q
}]
-
12
(b)
≤T−1∑t=0
∑q∈ZN+
Pr(q[t] = q|q[0]){�α[− �
Φ
∥∥q[t]− q∗Q,(�)∥∥2+D0
]}+
T−1∑t=0
∑q∈ZN+
Pr(q[t] = q|q[0])×
{�αE
{q>(s∗ − sQ[t])
}}, (28)
where (a) follows from the fact that q[t] is a discrete
stateMarkov chain in ZN+ and (b) follows from (27). Note that
forany q[t] ∈ ZN+ , limT→∞ 1T
∑T−1t=0 Pr(q[t] = q|q[0]) = π∞q ,
where π∞q denotes the stationary distribution of the Markovchain
q[t]. Moving V (q[0]) to the right hand side, dividingboth sides by
T , and letting T →∞ yields:
0≤J+∑q∈ZN+
π∞q (q)>(s∗−s∞B )=J+E
{(q∞)>(s∗−s∞B
}, (29)
where J , limT→∞ 1T∑T−1t=0
∑q∈ZN+
Pr(q[t] =
q|q[0]){�α[ −�Φ ‖q[t] − q∗(�)‖
2 + D0]}, and s∞Q ,arg maxx∈C
H[∞]|Ĥ[∞](q∞)>x represents the steady-state
service rates with Q-bit CSI.Next, consider the term E
{(q∞)>(s∗ − s∞Q )
}in (29). For
any given realization of q∞ in the steady-state, from the
designof the MaxWeight scheduler in (5), we have that
(q∞)>s∗ ≤ maxx∈CH[∞]
(q∞)>x = (q∞)>s∞. (30)
where s∞ , limQ→∞ s∞Q and H[∞] represent the full CSI inthe
steady state. Hence, for any realization of q∞ such thatq∞ 6= ρs∗
for some ρ ∈ R, if Q is sufficiently large, wemust have (q∞)>s∗
− (q∞)>s∞Q ≤ 0. Hence, there existsa critical value Q] such that
for all Q > Q], the averagevalue of (q∞)>s∗−(q∞)>s∞Q can
be made non-positive, i.e.,E{
(q∞)>(s∗ − s∞Q )}≤ 0. Hence, we consider two cases
based on the positivity of E{
(q∞)>(s∗ − s∞Q )}
as follows:
Case I): Q ≥ Q] such that E{
(q∞)>(s∗ − s∞Q )}≤ 0: In
this case, it follows from (29) that
0 ≤ limT→∞
1
T
∑T−1t=0
∑q∈ZN+
Pr(q[t] = q|q[0]){�α[− �
Φ
∥∥q[t]− q∗Q,(�)∥∥2 +D0]}. (31)We now consider the term in the
second line in (31) by settingα = 0. Similar to the proof of
Proposition 1, suppose that∥∥q[t] − q∗Q,(�)∥∥ ≥ γ/√�, where γ will
be specified shortly.This implies that 1‖q[t]−q∗
Q,(�)‖ ≤
1γ . Then, the second line in
(31) can be upper bounded as:− �
Φ
∥∥q[t]− q∗Q,(�)∥∥2 +D0= −√�
Φ
∥∥q[t]− q∗Q,(�)∥∥(√�‖q[t]− q∗Q,(�)‖+D0Φ√
�‖q[t]− q∗Q,(�)‖
)≤ −√�
Φ
∥∥q[t]− q∗Q,(�)∥∥(γ − D0Φγ). (32)
Hence, by choosing γ >√D0Φ, we have
− �Φ
∥∥q[t]− q∗Q,(�)∥∥2 +D0 ≤ −√�δ̂Φ ∥∥q[t]− q∗Q,(�)∥∥, (33)
where δ̂ = γ − D0Φγ > 0. Plugging in γ >√D0Φ to define
a
ball B , {q : ‖q− q∗Q,(�)‖ ≤√D0Φ/
√�}, we have
− �Φ
∥∥q[t]−q∗Q,(�)∥∥2+D0 ≤−√�δ‖q[t]−q∗Q,(�)‖, if q[t]∈Bc.On the
other hand, when ‖q[t] − q∗Q,(�)‖ ≤
√D0Φ/
√�, it is
clear that −(�/Φ)∥∥q[t]− q∗Q,(�)∥∥2 +D0 ≤ η for some η >
0.
Combining these facts, we have
− �Φ
∥∥q[t]− q∗Q,(�)∥∥2 +D0≤ −�δ‖q[t]− q∗Q,(�)‖1Bc(q[t]) + η1B(q[t]).
(34)
Substituting (34) into (31) yields:
0 ≤ limT→∞
1
T
T−1∑t=0
∑q∈ZN+
Pr(q[t] = q|q[0])× (35)
(− �δ‖q[t]− q∗Q,(�)‖1Bc(q) + η1B(q)
)=η∑q∈B
π∞q −√�δ∑q∈Bc
‖q− q∗Q,(�)‖π∞q , (36)
where we use the fact that, ∀q ∈ ZN+ ,limT→∞
1T
∑T−1t=0 Pr{q[t] = q|q[0]} = π∞q . Re-arranging
the terms and with some manipulations, the above inequalitycan
be written as:√�δ∑
q∈ZN+
‖q−q∗Q,(�)‖π∞q ≤
∑q∈B
(η+√�δ‖q−q∗Q,(�)‖
)π∞q
≤ (η + δγ)∑q∈B
π∞q ≤ (η + δγ), (37)
where the second inequality follows from the definition of
B.Note here that the left-hand-side is precisely
√�δE{‖q∞ −
q∗Q,(�)‖}. Thus, multiplying both sides by 1/√�δ, we have:
E{‖q∞ − q∗Q,(�)‖} ≤(γ +
η
δ
) 1√�
= O
(1√�
). (38)
Case II): Q ≤ Q] such that E{
(q∞)>(s∗ − s∞Q )}> 0: In
this case, we set α = 1. It thus follows from (27) that:
E{
∆V1(q[t])|q[t]}≤ −�
2
Φ
∥∥∥q[t]− q∗Q,(�)∥∥∥2 +�‖q[t]− q∗Q,(�)‖C(Q) + �D0, (39)
where C(Q) is defined in the proof of Proposition 1 (cf.Eq.
(19)). Note that (39) is identical to (23). Then, followingexactly
the same steps as in the proof of Proposition 1, wehave:
E{∆V1(q[t])|q[t] = q} ≤ −�δ1‖q−q∗Q,(�)‖1Bc1(q)+η11B1(q).
where δ1, η1, and B1 are the same as in the proof ofProposition
1. Then, it follows from (28) that
E{V1(q[T ]|q[0])}−V1(q[0])≤η1∑q∈B1
T−1∑t=0
Pr{q[t]=q|q[0]}
− �δ1∑q∈Bc1
‖q− q∗(�)‖T−1∑t=0
Pr{q[t] = q|q[0]}. (40)
Following similar steps as in Case I to divide T on both sideson
(40) and let T → ∞, we have 0 ≤ η1
∑q∈B1 π
∞q −
-
13
�δ1∑
q∈Bc1‖q− q∗Q,(�)‖π
∞q . Re-arranging the terms and with
some manipulations, the above inequality can be written
as:�δ1∑
q∈ZN+
‖q− q∗Q,(�)‖π∞q ≤
∑q∈B1
(η1 + �δ1‖q− q∗Q,(�)‖
)π∞q
≤ (η1 + δ1γ1)∑q∈B
π∞q ≤ (η1 + δ1γ1),
where γ1 is the same as in the proof of Proposition 1. Notethat
the left-hand-side is �δ1E{‖q∞ − q∗Q,(�)‖}. Multiplyingboth sides
by 1�δ1 , we have:
E{‖q∞ − q∗Q,(�)‖} ≤(γ1 +
η1δ1
)1
�
=([
(C(Q)Φ)+√
(C(Q)Φ)2+4D0Φ]
+η
δ
) 1�
= O
(C(Q)
1
�
).
This completes the proof of Theorem 2.
APPENDIX DPROOF OF THEOREM 3
To show the results in Theorem 3, we first note
thatE{an[t]|qn[t]} = min{U
′−1n (�qn[t], A
max)} and a∗n =U′−1n (�q
∗n), ∀n. Thus, we have:
‖a∞Q − a∗Q‖ ≤ ‖a∞Q − a∗Q‖1
=
N∑n=1
∣∣∣∣E{min{U ′−1n (�q∞n , Amax)}}− U ′−1n (�q∗Q,(�),n)∣∣∣∣(a)
≤N∑n=1
E{∣∣∣min{U ′−1n (�q∞n , Amax)}− U ′−1n (�q∗Q,(�),n)∣∣∣}
(b)
≤N∑n=1
E{∣∣∣U ′−1n (�q∞n )− U ′−1n (�q∗Q,(�),n)∣∣∣}
(c)=
N∑n=1
E{∣∣∣[U ′−1n (�q̃n)]′(�q∞n − �q∗Q,(�),n)∣∣∣}
(d)
≤N∑n=1
E{∣∣∣ 1U ′′n (�q̃n)
∣∣∣∣∣∣�q∞n − �q∗Q,(�),n∣∣∣}
≤N∑n=1
E{�
φ
∣∣q∞n − q∗Q,(�),n∣∣} = �φE{∥∥q∞ − q∗Q,(�)∥∥1}≤ �√N
φE{∥∥q∞−q∗Q,(�)∥∥}, (41)
where (a) follows from Jensen’s inequality and the convexityof
the L1-norm; (b) follows from relaxing the projection onto[0,
Amax]; (c) follows from the mean value theorem; and (d)follows from
the inverse function lemma. Recall in the proofof Theorem 2 (cf.
(29)), we have 0≤J+
∑q∈ZN+
π∞q (q)>(s∗−
s∞Q )=J+E{
(q∞)>(s∗−s∞Q )}
. Again, based on the positivityof the term E
{(q∞)>(s∗−s∞Q )
}, we consider two cases:
Case I): Q > Q] such that E{
(q∞)>(s∗ − s∞Q )}≤ 0: In
this case, we can again discard E{
(q∞)>(s∗ − s∞Q )}
in (29)and let α = 0 to obtain:
0 ≤ limT→∞
1
T
∑T−1t=0
∑q∈ZN+
Pr(q[t] = q|q[0])×{− �
Φ
∥∥q[t]− q∗Q,(�)∥∥2}+D0.
By re-arranging, multiplying both sides by Φ/�, and notingthat
limT→∞ 1T
∑T−1t=0 Pr{q[t] = q|q[0]} = π∞q , we have
E{‖q∞ − q∗Q,(K)‖
2}≤ D0Φ/�. (42)
It then follows from (41) that
‖a∞Q − a∗Q‖2 ≤(�√N
φE{∥∥q∞ − q∗Q,(�)∥∥})2 (a)≤
�2N
φ2E{∥∥q∞ − q∗Q,(�)∥∥2} (b)≤ �2Nφ2 D0 Φ� = �ND0Φφ2 , (43)
where (a) follows from Jensen’s inequality; and (b) followsfrom
(42). Taking square root on both sides of (43) yields‖a∞Q − a∗Q‖ =
O(
√�).
Case II): Q ≤ Q] such that E{
(q∞)>(s∗ − s∞Q )}> 0: In
this case, we set α = 1 and it follows from (27) that:
E{
∆V1(q[t])|q[t]}≤ −�
2
Φ
∥∥∥q[t]− q∗Q,(�)∥∥∥2 +�C(Q)‖q[t]− q∗Q,(�)‖+ �D0
= −�2
Φ
(∥∥q[t]− q∗Q,(�)∥∥− C(Q)Φ2�)2
+D, (44)
where C(Q) is defined in the proof of Proposition 1 (cf.Eq.
(19)) and D , C(Q)4 +
�D0Φ . Telescoping the inequality
in (44) from t = 0 to T − 1 yields:
E{V1(q[T ]|q[0])}−V1(q[0])≤−�2
Φ
T−1∑t=0
∑q∈ZN+
Pr{q[t]=q|q[0]}
×(∥∥q[t]− q∗Q,(�)∥∥− C(Q)Φ2�
)2+DT. (45)
Dividing both sides of (45) by �2T , letting T →∞, and
notingthat limT→∞ 1T
∑T−1t=0 Pr{q[t] = q|q[0]} = π∞q , ∀q ∈ ZN+ ,
we have that:
E{(∥∥q∞ − q∗Q,(�)∥∥− C(Q)Φ2�
)2}≤ DΦ
�2.
Taking square root on both sides yields:[E{(∥∥q∞ − q∗Q,(�)∥∥−
C(Q)Φ2�
)2}] 12≤√DΦ
�. (46)
Moreover, examining the left-hand-side of (46), we have[E{(∥∥q∞
− q∗Q,(�)∥∥− C(Q)Φ2�
)2}] 12(a)
≥ E{[(∥∥q∞ − q∗Q,(�)∥∥− C(Q)Φ2�
)2] 12}= E
{∣∣∣∣∥∥q∞ − q∗Q,(�)∥∥− C(Q)Φ2�∣∣∣∣}
≥ E{∥∥q∞ − q∗Q,(�)∥∥− C(Q)Φ2�
}= E
{∥∥q∞ − q∗Q,(�)∥∥}− C(Q)Φ2� , (47)where (a) follows from
Jensen’s inequality. Combining (41),(46), and (47) yields:
‖a∞Q − a∗Q‖ ≤�√N
φE{∥∥q∞ − q∗Q,(�)∥∥}
=�√N
φ
(C(Q)Φ
2�+
√DΦ
�
)= O(C(Q)).
-
14
Note that Cases I and II are exactly the same results as
statedin Theorem 3. This completes the proof.
REFERENCES
[1] Y. Zhu, Z. Zhang, Z. Marzi, C. Nelson, U. Madhow, B. Y.
Zhao, andH. Zheng, “Demystifying 60 GHz outdoor picocells,” in
Proc. ACMMobiCom, Maui, HI, September 2014, pp. 5 – 16.
[2] S. Sur, V. Venkateswaran, X. Zhang, and P. Ramanathan, “60
GHz indoornetworking through flexible beams: A link-level
profiling,” in Proc. ACMSIGMETRICS, Portland, OR, June 2015, pp.
71–84.
[3] S. Rangan, T. S. Rappaport, and E. Erkip, “Millimeter-wave
cellularwireless networks: Potentials and challenges,” Proceedings
of the IEEE,vol. 102, no. 3, pp. 366–385, mar 2014.
[4] H. Zhao, R. Mayzus, S. Sun, M. Samimi, J. K. Schulz, Y.
Azar, K. Wang,G. N. Wong, F. Gutierrez, and T. S. Rappaport, “28
GHz millimeter wavecellular communication measurements for
reflection and penetration lossin and around buildings in New York
City,” IEEE Commun. Mag.,vol. 51, no. 7, pp. 154–160, July
2013.
[5] Z. Pi and F. Khan, “An introduction to millimeter-wave
mobile broad-band systems,” IEEE Commun. Mag., vol. 49, no. 6, pp.
101–107, June2011.
[6] A. Alkhateeb, O. E. Ayach, GeertLeus, and R. W. Heath,
“Channelestimation and hybrid precoding for millimeter wave
cellular systems,”IEEE J. Sel. Topics Signal Process., vol. 8, no.
5, pp. 831–846, October2014.
[7] J. Wang et al., “Beam codebook based beamforming protocol
formulti-Gbps millimeter-waveWPAN systems,” IEEE J. Sel. Areas
Commun.,vol. 27, no. 8, pp. 1390–1399, August 2009.
[8] S. Hur, T.Kim, D.Love, J. Krogmeier, T. Thomas, and A.
Ghosh,“Millimeter wave beamforming for wireless backhaul and access
insmall cell networks,” IEEE Trans. Commun., vol. 61, no. 10, pp.
4391–4403, October 2013.
[9] S. Han, I. Chih-Lin, Z. Xu, and C. Rowell, “Large-scale
antenna systemswith hybrid analog and digital beamforming for
millimeter wave 5G,”IEEE Commun. Mag., vol. 53, no. 1, pp. 186–194,
Jan. 2015.
[10] X. Zhang, A. Molisch, and S. Kung,
“Variable-phase-shift-based RF-baseband codesign for MIMO antenna
selection,” IEEE Trans. SignalProcess., vol. 53, no. 11, pp.
4091–4103, Nov. 2005.
[11] V. Venkateswaran and A. van der Veen, “Analog beamforming
inMIMO communications with phase shift networks and online
channelestimation,” IEEE Trans. Signal Process, vol. 58, no. 8, pp.
4131–4143,Aug. 2010.
[12] O. E. Ayach, S. Rajagopal, S. Abu-Surra, Z. Pi, and R. W.
Heath,“Spatially sparse precoding in millimeter wave MIMO systems,”
IEEETrans. Wireless Commun, vol. 13, no. 3, pp. 1499–1513, Mar.
2013.
[13] T. Bogale, L. B. Le, A. Haghighat, and L. Vandendorpe, “On
the numberof RF chains and phase shifters, and scheduling design
with hybridanalog-digital beamforming,” IEEE Trans. Wireless
Commun., vol. 15,no. 5, pp. 3311–3326, May 2015.
[14] M. J. Neely, E. Modiano, and C.-P. Li, “Fairness and
optimal stochasticcontrol for heterogeneous networks,” IEEE/ACM
Trans. Netw., vol. 16,no. 2, pp. 396–409, Apr. 2008.
[15] A. Eryilmaz and R. Srikant, “Fair resource allocation in
wirelessnetworks using queue-length-based scheduling and congestion
control,”IEEE/ACM Trans. Netw., vol. 15, no. 6, pp. 1333–1344, Dec.
2007.
[16] X. Lin, N. B. Shroff, and R. Srikant, “A tutorial on
cross-layer opti-mization in wireless networks,” IEEE J. Sel. Areas
Commun., vol. 24,no. 8, pp. 1452–1463, Aug. 2006.
[17] J. Volakis, Antenna Engineering Handbook, Fourth Edition.
McGraw-Hill Companies,Incorporated, 2007.
[18] H. Hashemi, X. Guan, A. Komijani, and A. Hajimiri, “A
24-GHz SiGephased-array receiver-LO phase-shifting approach,” IEEE
Transactionson Microwave Theory and Techniques, vol. 53, no. 2, pp.
614–626, 2005.
[19] H. Steyskal, “Digital beamforming antennas: An
introduction,” Mi-crowave Journal, vol. 30, no. 1, pp. 107–124,
Jan. 1987.
[20] H. Steyskal and J. F. Rosel, “Digital beamforming for radar
systems,”Microwave Journal, vol. 32, no. 1, pp. 121–136, Jan.
1989.
[21] A. M. Hunter, J. G. Andrews, and S. Weber, “Transmission
capacity ofad hoc networks with spatial diversity,” IEEE Trans.
Wireless Commun.,vol. 7, no. 12, pp. 5058–5071, Dec. 2008.
[22] J. Wildman, P. H. Nardelli, M. Latva-aho, and S. Weber, “On
the jointimpact of beamwidth and orientation error on throughput in
wirelessdirectional poisson networks,” IEEE Trans. Wireless
Commun., vol. 13,no. 12, pp. 7072–7085, Jun. 2014.
[23] H. Shokri-Ghadikolaei, L. Gkatzikis, and C. Fischione,
“Beam-searchingand transmission scheduling in millimeter wave
communications,” inProc. IEEE ICC, London, UK, Jun. 2015, pp. 1292
– 1297.
[24] E. G. Larsson, O. Edfors, and T. L. Marzetta, “Massive MIMO
for nextgeneration wireless systems,” IEEE Commun. Mag., vol. 52,
no. 2, pp.186–195, Feb. 2014.
[25] N. Jindal, “MIMO broadcast channels with finite rate
feedback,” IEEETrans. Inf. Theory, vol. 52, no. 11, pp. 5045–5059,
Nov. 2006.
[26] M. S. Bazaraa, H. D. Sherali, and C. M. Shetty, Nonlinear
Programming:Theory and Algorithms, 3rd ed. New York, NY: John Wiley
& SonsInc., 2006.
[27] F. Rusek, D. Persson, B. K. Lau, E. G. Larsson, T. L.
Marzetta,O. Edfors, and F. Tufvesson, “Scaling up MIMO:
Opportunities andchallenges with very large arrays,” IEEE Signal
Process. Mag., vol. 30,no. 1, pp. 40–46, Jan. 2013.
[28] J. Liu, A. Eryilmaz, N. B. Shroff, and E. S. Bentley,
“Understandingthe impacts of limited channel state information on
massive MIMOcellular network optimization,” IEEE Journal of
Selected Areas inCommunications (JSAC), vol. 35, no. 8, pp.
1715–1727, August 2017.
[29] M. Matthaiou, M. R. MacKay, P. J. Smith, and J. A. Nossek,
“Onthe condition number distribution of complex Wishart matrices,”
IEEETrans. Commun., vol. 58, no. 6, pp. 1705–1717, Jun. 2010.
[30] J. Liu and E. S. Bentley, “Understanding the impacts of
hybridbeamforming on millimeter wave cellular network
performances,” TheOhio State University, Tech. Rep., July 2016.
[Online]. Available: https://www2.ece.ohio-state.edu/∼liu/mmWave
HybridBF SCH TR.pdf?dl=0
[31] S. P. Meyn and R. L. Tweedie, Markov Chains and Stochastic
Stability,2nd ed. Cambridge, UK: Cambridge University Press,
2009.
Jia Liu (S’03–M’10–SM’16) received his Ph.D.degree in the
Bradley Department of Electrical andComputer Engineering at
Virginia Tech, Blacksburg,VA in 2010. He then joined the Department
ofElectrical and Computer Engineering at The OhioState University
as a Postdoctoral Researcher andsubsequently a Research Assistant
Professor. He iscurrently an Assistant Professor in the
Departmentof Computer Science at Iowa State University, wherehe
joined in Aug. 2017. His research areas includetheoretical
foundations of control and optimization
for stochastic networked systems, distributed algorithms design,
optimizationof cyber-physical systems, data analytics
infrastructure, and machine learning.Dr. Liu is a senior member of
IEEE, a member of ACM, and a member ofSIAM. His work has received
numerous awards at top venues, including IEEEINFOCOM’19 Best Paper
Award, IEEE INFOCOM’16 Best Paper Award,IEEE INFOCOM’13 Best Paper
Runner-up Award, IEEE INFOCOM’11 BestPaper Runner-up Award, and
IEEE ICC’08 Best Paper Award. He is a recipientof Bell Labs
President Gold Award in 2001. He has served as a TPC memberfor IEEE
INFOCOM since 2010 and a TPC member of ACM MobiHoc since2017. His
research has been supported by NSF, AFOSR, AFRL, and ONR.
Elizabeth S. Bentley has a B.S. degree in ElectricalEngineering
from Cornell University, a M.S. degreein Electrical Engineering
from Lehigh University,and a Ph.D. degree in Electrical Engineering
fromUniversity at Buffalo. She was a National ResearchCouncil
Post-Doctoral Research Associate at the AirForce Research
Laboratory in Rome, NY. Currently,she is employed by the Air Force
Research Labora-tory in Rome, NY, performing in-house research
anddevelopment in the Networking Technology branch.Her research
interests are in cross-layer optimiza-
tion, wireless multiple-access communications, wireless video
transmission,modeling and simulation, and directional
antennas/directional networking.