Embed Size (px)
Citation preview

Com
puta
tiona
l Vis
ion
U. M
inn.
Psy
503
6D
anie
l Ker
sten
Lect
ure
19: M
otio
nII
http
://vi
sion
.psy
ch.u
mn.
edu/
ww
w/k
erst
en-la
b/co
urse
s/P
sy50
36/S
ylla
busF
2000
.htm
l)
Init
ializ
e
Off@General::spell1D;
<<Graphics`
Ou
tlin
e
Las
t ti
me
• E
arly
mot
ion
mea
sure
men
t--t
ypes
of
mod
els
corr
elat
ion
grad
ient
feat
ure
trac
king
•Fun
ctio
nal
goal
s of
mot
ion
mea
sure
men
ts
• O
ptic
flo
w
Cos
t fun
ctio
n (o
r en
ergy
) de
scen
t mod
el
A p
oste
rior
i and
a p
rior
i con
stra
ints
Gra
dien
t des
cent
alg
orith
ms
Com
pute
r vs
. hum
an v
isio
n an
d op
tic f
low
-- a
rea
vs. c
onto
ur
To
day
‡M
otio
n p
heno
men
a
Nei
ther
the
area
-bas
ed n
or th
e co
ntou
r-ba
sed
algo
rith
ms
we'
ve s
een
can
acco
unt f
or th
e ra
nge
of h
uman
mot
ion
phen
omen
a or
psy
chop
hysi
cal d
ata
that
we
now
hav
e.
Loo
k at
hum
an m
otio
n pe
rcep
tion
‡L
ocal
mea
sure
men
ts
Rep
rese
ntin
g m
otio
n, O
rien
tatio
n in
spa
ce-t
ime
Four
ier
repr
esen
tatio
n an
d sa
mpl
ing
Opt
ic f
low
, the
gra
dien
t con
stra
int,
aper
ture
pro
blem
Neu
ral s
yste
ms
solu
tions
to th
e pr
oble
m o
f m
otio
n m
easu
rem
ent.
Spac
e-tim
e or
ient
ed r
ecep
tive
fiel
ds
‡G
loba
l int
egra
tion
Sket
ch a
Bay
esia
n fo
rmul
atio
n--t
he in
tegr
atin
g un
cert
ain
loca
l mea
sure
men
ts w
ith th
e ri
ght p
rior
s ca
n be
use
d to
mod
el a
va
riet
y of
hum
an m
otio
n re
sults
.
Hu
man
mo
tio
n p
erce
pti
on
Dem
o:
are
a-b
ased
vs.
co
nto
ur-
bas
ed m
od
els
Las
t tim
e w
e as
ked:
Are
the
repr
esen
tatio
n, c
onst
rain
ts, a
nd a
lgor
ithm
a g
ood
mod
el o
f hu
man
mot
ion
perc
eptio
n?
The
ans
wer
see
ms
to b
e "n
o". T
he r
epre
sent
atio
n of
the
inpu
t is
prob
ably
wro
ng. H
uman
obs
erve
rs s
eem
to g
ive
mor
e w
eigh
t to
cont
our
mov
emen
t tha
n to
inte
nsity
flo
w. H
uman
per
cept
ion
of th
e se
quen
ce il
lust
rate
d be
low
dif
fers
fro
m
"are
a-ba
sed"
mod
els
of o
ptic
flo
w s
uch
as th
e ab
ove
Hor
n an
d Sc
hunc
k al
gori
thm
. The
two
curv
es b
elow
wou
ld g
ive
a m
axim
um c
orre
latio
n at
zer
o--h
ence
zer
o pr
edic
ted
velo
city
. Hum
an o
bser
vers
see
the
cont
our
mov
e fr
om le
ft to
rig
ht--
beca
use
the
cont
ours
are
str
onge
r fe
atur
es th
an th
e gr
ay-l
evel
s. H
owev
er w
e w
ill s
ee in
Ade
lson
's m
issi
ng f
unda
men
tal
illus
ion
that
the
stor
y is
not
as
sim
ple
as a
mer
e "t
rack
ing
of e
dges
" --
and
we
will
ret
urn
to s
patia
l fre
quen
cy c
hann
els
to
acco
unt f
or th
e hu
man
vis
ual s
yste
m's
mot
ion
mea
sure
men
ts
219.MotionII.nb

size = 120;
Clear[y];
low = 0.2; hi = .75;
y[x_] := hi /; x<1
y[x_] := .5 Exp[-(x-1)^2]+.1 /; x >= 1
ylist = Table[y[i],{i,0,3,3/255.}];
width = Dimensions[ylist][[1]];
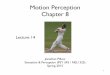
Let
's m
ake
a 2D
gra
y-le
vel p
ictu
re d
ispl
ayed
with
Lis
tDen
sity
Plo
t to
exp
erie
nce
the
Mac
h ba
nds
for
ours
elve
s. P
lotR
ange
al
low
s us
to s
cale
the
brig
htne
ss.
picture1 = Table[ylist,{i,1,width/2}];
picture2 = .9 - Transpose[Reverse[Transpose[picture1]]];
g1 = ListPlot[picture1[[size/2]],DisplayFunction->Identity,PlotStyle-
>{Hue[.3]}];
g2 = ListPlot[picture2[[size/2]],DisplayFunction->Identity,PlotStyle-
>{Hue[.6]}];
Show[g1,g2,DisplayFunction->$DisplayFunction];
50
100
150
200
250
0.2
0.4
0.6
0.8
ListDensityPlot[picture1,Frame->False,Mesh->False,
PlotRange->{0,1}, AspectRatio->Automatic];
ListDensityPlot[picture2,Frame->False,Mesh->False,
PlotRange->{0,1}, AspectRatio->Automatic];
19.MotionII.nb
3
Ap
ertu
re e
ffec
ts
niter = 8; width = 64;
theta1 = Pi/4.; contrast1 = 0.5;
freq1 = 4.; period1 = 1/freq1;
stepx1 = Cos[theta1]*(period1/niter); stepy1 = Sin[theta1]*(period1/niter);
grating[x_,y_,freq_,theta_] := Cos[(2. Pi freq)*(Cos[theta]*x +
Sin[theta]*y)];
‡C
ircu
lar
aper
ture
For[i=1,i<niter + 1,i++,
DensityPlot[If[(x-0.5)^2+(y-0.5)^2<0.3^2,grating[x+i*stepx1,y+i*stepy1,freq
1,theta1],0],{x,0,1},{y,0,1},
Mesh->False,Frame->None,PlotRange->{-2,2},PlotPoints->width];
];
‡Sq
uare
ape
rtur
e
For[i=1,i<niter + 1,i++,
DensityPlot[grating[x+i*stepx1,y+i*stepy1,freq1,theta1],{x,0,1},{y,0,1},
Mesh->False,Frame->None,PlotRange->{-2,2},PlotPoints->width];
];
Wha
t do
you
see
at th
e ve
rtic
al b
ound
arie
s? T
he h
oriz
onta
l bou
ndar
ies?
419.MotionII.nb

‡R
ecta
ngul
ar h
oriz
onta
l ap
ertu
re
For[i=1,i<niter + 1,i++,
DensityPlot[grating[x+i*stepx1,y+i*stepy1,freq1,theta1],{x,0,1},{y,0,.25},
Mesh->False,Frame->None,PlotRange->{-2,2},PlotPoints->width,
AspectRatio->Automatic];
];
‡R
ecta
ngul
ar v
erti
cal a
pert
ure
For[i=1,i<niter + 1,i++,
DensityPlot[grating[x+i*stepx1,y+i*stepy1,freq1,theta1],{x,0,.25},{y,0,1},
Mesh->False,Frame->None,PlotRange->{-2,2},PlotPoints->width,
AspectRatio->Automatic];
];
Ad
elso
n's
mis
sin
g f
un
dam
enta
l m
oti
on
illu
sio
n
We
firs
t m
ake
a sq
uare
-wav
e gr
atin
g.
real
squa
re[x
_,y_
,pha
se_]
:=
Sig
n[Si
n[x
+ p
hase
]];
And
mak
e a
four
-fra
me
mov
ie in
whi
ch t
he g
rati
ng g
ets
prog
ress
ivel
y sh
ifte
d L
EF
T in
ste
ps o
f P
i/2. T
hat
is w
e sh
ift
the
grat
ing
left
in 9
0 de
gree
ste
ps.
For
[i=0
,i<4,
i++,
Den
sity
Plo
t[re
alsq
uare
[x,y
,i P
i/2],
{x,0
,14}
,{y,
0,1}
, Fra
me-
>Fal
se,
Mes
h->F
alse
,Plo
tPoi
nts
-> 6
0, A
xes-
>Non
e, P
lotR
ange
->{-
4,4}
]];
Now
a s
quar
e w
ave
can
be d
ecom
pose
d in
to it
s Fo
urie
r co
mpo
nent
s as
:
rea
lsqu
are(
x) =
(4/p)
*{si
n(x)
+ 1
/3 s
in(3
x) +
1/5
sin
(5x)
+ 1
/7 s
in(7
x) +
...}
19.MotionII.nb
5
Now
sub
trac
t ou
t th
e fu
ndam
enta
l fr
eque
ncy
from
the
squ
are
wav
e
...le
avin
g (4
/p)*
{1/3
sin
(3x)
+ 1
/5 s
in(5
x) +
1/7
sin
(7x)
+ ..
.}
real
mis
sing
fund
amen
tal[
x_,y
_,ph
ase_
] :=
rea
lsqu
are[
x,y,
phas
e] -
(4.
0 / P
i) S
in[x
+ p
hase
];
And
mak
e an
othe
r fo
ur-f
ram
e m
ovie
in w
hich
the
mis
sing
fun
dam
enta
l gr
atin
g ge
ts
prog
ress
ivel
y sh
ifte
d L
EF
T in
ste
ps o
f P
i/2. T
hat
is w
e sh
ift
the
grat
ing
left
in 9
0 de
gree
ste
ps.
It is
wel
l-kn
own
that
a lo
w c
ontr
ast s
quar
e w
ave
with
a m
issi
ng f
unda
men
tal s
imila
r to
sam
e sq
uare
wav
e (t
here
is a
pitc
h an
alog
y in
aud
ition
). O
ne r
easo
n is
that
we
are
mor
e se
nsiti
ve to
sha
rp th
an g
radu
al c
hang
es in
inte
nsity
. If
you
look
at t
he
lum
inan
ce p
rofi
le w
ith th
e m
issi
ng f
unda
men
tal,
you
wou
ld p
roba
bly
gues
s th
at th
e pe
rcei
ved
mot
ion
for
this
seq
uenc
e w
ould
app
ear
to m
ove
to th
e le
ft, a
s be
fore
. But
it d
oesn
't. S
urpr
isin
gly,
the
mis
sing
fun
dam
enta
l wav
e ap
pear
s to
mov
e to
th
e ri
ght!
For
[i=0
,i<4,
i++,
Den
sity
Plo
t[re
alm
issi
ngfu
ndam
enta
l[x,
y,i
Pi/2
],{x
,0,1
4},{
y,0,
1}, F
ram
e->F
alse
,M
esh-
>Fal
se,P
lotP
oint
s ->
60,
Axe
s->N
one,
Plo
tRan
ge->
{-4,
4}]
]
Play
the
abov
e m
ovie
. It t
ypic
ally
app
ears
to b
e m
ovin
g to
the
righ
t. Y
ou c
an g
ener
ate
mov
ies
with
dif
fere
nt c
ontr
asts
by
adju
stin
g th
e Pl
otR
ange
par
amet
ers.
In f
act
the
mis
sing
fun
dam
enta
l fr
eque
ncy
mov
es t
owar
ds t
he le
ft a
s yo
u ca
n s
ee b
y pl
ayin
g th
e m
ovie
bel
ow.
For
[i=0
,i<4,
i++,
Plo
t[Si
n[x
+ i
Pi/2
],{x
,0,1
4},
Plo
tPoi
nts
-> 6
0, A
xes-
>Non
e]];
619.MotionII.nb

Wha
t in
the
sti
mul
us d
oes
mov
e to
the
rig
ht?
Why
mig
ht th
is b
e? P
roba
bly
the
best
exp
lana
tion
com
es f
rom
look
ing
at th
e do
min
ant f
requ
ency
com
pone
nt in
the
patte
rn, w
hich
is th
e 3r
d ha
rmon
ic. I
t tur
ns o
ut th
at th
e th
ird
harm
onic
is ju
mpi
ng in
1/4
cyc
le s
teps
to th
e ri
ght,
even
th
ough
the
patte
rn a
s a
who
le is
jum
ping
in 1
/4 c
ycle
ste
ps (
rela
tive
to th
e m
issi
ng f
unda
men
tal)
to th
e le
ft, a
s sh
own
in th
e fi
gure
bel
ow:
Mak
e a
mo
vie
wit
h P
lot[
] th
at s
ho
ws
the
thir
d h
arm
on
ic.
Wh
ich
way
do
es it
mo
ve?
For
[i=0
,i<4,
i++,
Plo
t[Si
n[3
(x +
i P
i/2)]
,{x,
0,14
},P
lotP
oint
s ->
60]
]
24
68
10
12
14
-1
-0.5
0.51
24
68
10
12
14
-1
-0.5
0.51
19.MotionII.nb
7
24
68
10
12
14
-1
-0.5
0.51
24
68
10
12
14
-1
-0.5
0.51
And
her
e is
the
mov
ie w
ith
jus
t th
e th
ird
har
mon
ic. W
hich
way
doe
s it
mov
e?
For
[i=0
,i<4,
i++,
Den
sity
Plo
t[Si
n[3
(x +
i P
i/2)]
,{x
,0,1
4},{
y,0,
1}, F
ram
e->F
alse
,M
esh-
>Fal
se,P
lotP
oint
s ->
60,
Axe
s->N
one,
Plo
tRan
ge->
{-4,
4}]
]
819.MotionII.nb

The
mai
n co
nclu
sion
dra
wn
from
this
dem
onst
ratio
n is
that
hum
an m
otio
n m
easu
rem
ent m
echa
nism
s ar
e tu
ned
to s
patia
l fr
eque
ncy.
How
can
the
infe
rred
bio
logi
cal m
echa
nism
s be
pie
ced
toge
ther
to c
ompu
te o
ptic
flo
w?
We
can
cons
truc
t th
e fo
llow
ing
roug
h ou
tline
. (Fo
r a
rece
nt a
lgor
ithm
for
opt
ic f
low
bas
ed o
n bi
olog
ical
ly p
laus
ible
spa
tiote
mpo
ral f
ilter
s se
e H
eege
r, 1
987)
. Ass
ume
we
have
, at e
ach
spat
ial l
ocat
ion,
a c
olle
ctio
n of
filt
ers
tune
d to
var
ious
ori
enta
tions
(q)
and
spe
eds
(s)
over
a lo
cal r
egio
n. (
Alr
eady
we
run
into
pro
blem
s w
ith th
is s
impl
e in
terp
reta
tion,
bec
ause
man
y V
1 ce
lls a
re k
now
n to
be
tune
d to
spa
tial a
nd te
mpo
ral
freq
uenc
y in
suc
h a
way
that
the
spat
io-t
empo
ral
filte
r is
the
prod
uct o
f th
e sp
ace
and
time
filte
rs. T
his
mea
ns th
at th
ere
is a
fav
ored
tem
pora
l fre
quen
cy th
at is
the
sam
e ac
ross
spa
tial f
requ
enci
es, s
o th
e fi
lter
will
be
tune
d to
dif
fere
nt s
peed
s de
pend
ing
on th
e sp
atia
l fre
quen
cy).
In th
is s
chem
e, th
e op
tic f
low
mea
sure
men
ts a
re d
istr
ibut
ed a
cros
s th
e un
its, s
o if
we
wan
ted
to r
ead
off
the
velo
city
fro
m
the
patte
rn o
f ac
tivity
, we
wou
ld n
eed
som
e ad
ditio
nal p
roce
ssin
g. F
or e
xam
ple,
the
optic
flo
w c
ompo
nent
s co
uld
be
repr
esen
ted
by th
e "c
ente
rs o
f m
ass"
acr
oss
the
dist
ribu
ted
activ
ity. B
ecau
se th
ese
mea
sure
men
ts a
re lo
cal,
we
still
hav
e th
e ap
ertu
re p
robl
em. W
e w
ill lo
ok a
t pos
sibl
e bi
olog
ical
sol
utio
ns to
this
pro
blem
in th
e ne
xt le
ctur
e.
Mo
tio
n p
laid
s
Tw
o ov
erla
ppin
g (a
dditi
ve tr
ansp
aren
t) s
inus
oids
at d
iffe
rent
ori
enta
tions
and
mov
ing
in d
iffe
rent
dir
ectio
ns a
re, u
nder
ce
rtai
n co
nditi
ons
seen
as
a si
ngle
pat
tern
mov
ing
with
a v
eloc
ity c
onsi
sten
t w
ith a
n in
ters
ectio
n of
con
stra
ints
. Und
er o
ther
co
nditi
ons,
the
two
indi
vidu
al c
ompo
nent
mot
ions
are
see
n.
19.MotionII.nb
910
19.MotionII.nb

Ori
enta
tio
n in
sp
ace-
tim
e
Rep
rese
nta
tio
n o
f m
oti
on
‡Mathematica
dem
o
size
=32;x0
=4;y0=4;pw
=12;xoffset
=1;
A1
=Table@Random@D,8size<,8size<D;H*A2
=A1;*L
A2=Table@Random@D,8size<,8size<D;
A2@@Range@y0,y0+pwD,Range@x0,x0+pwDDD
=A1@@Range@y0,y0+pwD,Range@x0-xoffset,x0+pw-xoffsetDDD;
ListDensityPlot@A1,MeshØFalseD;
ListDensityPlot@A2,MeshØFalseD;
05
1015202530
05
10
15
20
25
30 0
51015202530
05
10
15
20
25
30
19.MotionII.nb
11
nframes = 8;
xt = {};
For[i=0,i<nframes,i++,
A2[[Range[y0,y0+pw],Range[x0,x0+pw]]] =
A1[[Range[y0,y0+pw],Range[x0+i,x0+pw+i]]];
xt = Join[xt,{A2[[8]]}]
];
ListDensityPlot[xt, Mesh->False, Frame->False];
‡x-
y-t
spac
e
1219.MotionII.nb

Neu
rop
hys
iolo
gic
al f
ilter
s
‡Sp
ace-
tim
e fi
lter
s fo
r de
tect
ing
orie
ntat
ion
in s
pace
-tim
e
From
Wan
dell,
"Fo
unda
tions
of
Vis
ion"
19.MotionII.nb
13
‡A
pos
sibl
e m
echa
nsim
for
bui
ldin
g sp
ace-
tim
e fi
lter
s fr
om t
wo
spat
ial f
ilter
s w
ith
a te
mpo
ral d
elay
‡R
elat
ions
hip
of
the
grad
ient
con
stra
int
to o
rien
ted
spac
e-ti
me
filt
ers
vL x
vL y
L tx
y
∂ ∂∂ ∂
∂ ∂+
+=
0
vL x
L tx
∂ ∂∂ ∂
+=
0
Imag
e L
(x,y
,t) -
> b
lurr
ed in
spa
ce a
nd s
mea
red
in ti
me,
g(x
,y,t)
vg x
g tx
∂ ∂∂ ∂
+=
0
1419.MotionII.nb

Bay
esia
n m
od
el f
or
inte
gra
tin
g lo
cal
mo
tio
n m
easu
rem
ents
Glo
bal i
nteg
ratio
n.
19.MotionII.nb
15
Rec
all L
ore
nce
au &
Sh
iffr
ar's
dem
o
Gen
eral
pro
ble
m
Inte
rsec
tio
n o
f co
nst
rain
ts r
evis
ited
Gra
ting
plai
ds s
omet
ime
seen
as
cohe
rent
, oth
er ti
mes
as
two
over
lapp
ing
tran
spar
ent g
ratin
gs m
ovin
g se
para
tely
.
1619.MotionII.nb

Wei
ss &
Ad
elso
n's
Bay
es m
od
el f
or
inte
gra
tio
n
‡P
roba
bilis
tic
inte
rpre
tati
on o
f in
ters
ecti
on o
f co
nstr
aint
s
19.MotionII.nb
17
‡P
roba
bilis
tic
inte
rpre
tati
on w
ith
nois
y m
easu
rem
ents
‡G
ener
aliz
e to
oth
er t
ypes
of
mot
ion
stim
uli
Req
uire
men
ts f
or g
ener
aliz
atoi
n:
Bas
e lik
elih
oods
on
actu
al im
age
data
spat
iote
mpo
ral
mea
sure
men
ts
Incl
ude
“2D
” fe
atur
es
E.g
. cor
ners
Rig
id r
otat
ions
, non
-rig
id d
efor
mat
ions
Stag
e 1:
loca
l lik
elih
oods
Stag
e 2:
Bay
esia
n co
mbi
natio
n
- Pr
ior
slow
ness
--
wag
on w
heel
exa
mpl
e, q
uart
et e
xam
ple
smoo
thne
ss -
e.g
. tra
nsla
ting
rigi
d ci
rcle
1819.MotionII.nb

‡O
verv
iew
of
Wei
ss &
Ade
lson
the
ory
19.MotionII.nb
19
Tes
ts o
f th
eory
‡R
hom
bus
expe
rim
ent
‡A
pert
ure
effe
cts
2019.MotionII.nb

‡P
laid
s
19.MotionII.nb
21
From
Wei
ss a
nd A
dels
on, 1
998.
Typ
e I
and
I pl
aids
. (Y
o an
d W
ilson
, 199
2)
Ap
pen
dic
es
Ref
eren
ces
Bar
low
, H. B
., &
Lev
ick,
R. W
. (19
65).
The
Mec
hani
sm o
f D
irec
tiona
l Sel
ectiv
ity
in th
e R
abbi
t's R
etin
a. J
ourn
al
of P
hysi
olog
y, 1
73, 4
77-5
04.
Bar
low
, H. (
1996
). I
ntra
neur
onal
info
rmat
ion
proc
essi
ng, d
irec
tiona
l se
lect
ivity
and
mem
ory
for
spat
io-t
empo
ral
sequ
ence
s.
Net
wor
k: C
ompu
tatio
n in
Neu
ralS
yste
ms,
7, 2
51-2
59.
Bra
ddic
k, O
. J. (
1974
). A
sho
rt-r
ange
pro
cess
in a
ppar
ent m
otio
n. V
isio
n R
esea
rch,
14,
519
-527
.
Has
sens
tein
, B.,
& R
eich
ardt
, W. (
1956
). F
unct
iona
l St
ruct
ure
of a
Mec
hani
sm o
f Pe
rcep
tion
of O
ptic
al M
ove-
men
t. Pr
ocee
ding
s Fi
rst I
nter
natio
nal
Con
gres
s on
Cyb
erne
tics,
797
-801
.
He,
S.,
& M
asla
nd, R
. H. (
1997
). R
etin
al d
irec
tion
sele
ctiv
ity a
fter
targ
eted
lase
r ab
latio
n of
sta
rbur
st a
mac
rine
cel
ls.
Nat
ure,
389
(664
9), 3
78-8
2.
Hild
reth
, E. C
. (19
84).
The
Mea
sure
men
t of
Vis
ual M
otio
n. C
ambr
idge
, MA
: MIT
Pre
ss.
Van
San
ten,
J. P
. H.,
& S
perl
ing,
G. (
1985
). E
labo
rate
d R
eich
ardt
Det
ecto
rs. J
ourn
al o
f th
e O
ptic
al S
ocie
ty o
f A
mer
ica,
2(
7), 3
00-3
21.
Ade
lson
, E. H
., &
Ber
gen,
J. R
. (19
85).
Spa
tiote
mpo
ral E
nerg
y M
odel
s fo
r th
e Pe
rcep
tion
of M
otio
n. J
ourn
al o
f th
e O
ptic
al
Soci
ety
of A
mer
ica,
2(2
), 2
84-2
99.
Koc
h, C
., T
orre
, V.,
& P
oggi
o, T
. (19
86).
Com
puta
tions
in th
e V
erte
brat
e R
etin
a: M
otio
n D
iscr
imin
atio
n G
ain
Enh
ance
-m
ent a
nd D
iffe
rent
iatio
n. T
rend
s in
Neu
rosc
ienc
e, 9
(5),
204
-211
.
Yui
lle, A
., &
Grz
ywac
z, N
. (19
88).
A c
ompu
tatio
nal t
heor
y fo
r th
e pe
rcep
tion
of c
oher
ent v
isua
l mot
ion.
Nat
ure,
333
, 71-
74.
J.A
. Mov
shon
, E.H
. Ade
lson
, M.S
. Giz
zi a
nd W
.T. N
ewso
me.
198
6. T
he a
naly
sis
of m
ovin
g vi
sual
pat
tern
s.
Wei
ss, Y
., &
Ade
lson
, E. H
. (19
98).
Slo
w a
nd s
moo
th: a
Bay
esia
n th
eory
for
the
com
bina
tion
of lo
cal m
otio
n si
gnal
s in
hu
man
vis
ion
(A.I
. Mem
o N
o. 1
624)
. M.I
.T.
© 2
000
Dan
iel
Ker
sten
, C
ompu
tatio
nal
Vis
ion
Lab
, D
epar
tmen
t of
Psy
chol
ogy,
Uni
vers
ity o
f M
inne
sota
. (
http
://vi
sion
.psy
ch.u
mn.
edu/
ww
w/k
erst
en-la
b/ke
rste
n-la
b.ht
ml)
2219.MotionII.nb