Embed Size (px)
Citation preview

Robotics Technology Development at Ames 20
HET Telerobo c Systems
Robonaut 2• Humanoid robot(42 DOF, human-scale/safe)
• Perform dexterous IVA/EVA manipula on tasks
• Share astronaut tools and workspaces
Smart SPHERES• Free-flyi ng robot (6 axis, cold-gas propulsion)
• Perform IVA/EVA remote mobile sensor tasks
• Improve ground control situa on awa reness
Surface Telerobo cs • Mobile robot on surface(Moon, asteroid, Mars)
• Perform surface ac vi es before/support/a er crew
• Crew centric opera ons from inside flight vehi cl e
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 21
Surface Telerobo cs
Candidate Missions• L2 Lunar Farside. Orion crew module test flight (~2020) to Ear th- Mo on L2 poi nt
• Near-Earth Asteroid. NEA dynamics and distance make it impossible to manually control robot from Earth
• Mars Orbit. Crew must operate surface robot from orbit when circumstances (con ngency, et c. ) pr ecl ude Ear th cont rol
What will the test achieve?• Obtain baseline engineering data• Validate & correlate prior ground simula ons • Reduce the risk that mission planning is based on inaccurate assump ons
Surface Telerobo cs is an engineering test of a human-robot “opscon” for future deep-space human explora on mi ssi ons
(NASA GSFC)
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 22
L2 Lunar Farside (Waypoint) Mission Concept
Orion at Earth-Moon L2 Lagrange point• 60,000 km beyond lunar farside• Allows sta on keepi ng wi th mi ni ma l fuel • Crew remotely operates robot on lunar
farside• Less expensive than human surface mission• Does not require human-rated lander
Primary objec ve: lunar tel escope • Use telerobo o set up radi o tel escope • Requires surface survey, antenna/receiver
deployment, and inspec on/docume nt a on • Lunar farside provides radio quiet zone for
low-freq measurements cosmic dawn
Secondary objec ve: samp l e col lec on • Use telerobo o per form field geol ogy • Requires scou ng, samp l ing (pos si bl y
subsurface), and sample caching/return• South Pole Aitken (SPA) basin sampling is
the highest priority lunar science objec ve
(Lockheed Martin / LUNAR)
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 23
Waypoint Mission Simula on (2013)
June 17 July 26 August 20Spring 2013
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 24
Crew Interface (Task Sequence Mode)
Terrain hazardsTerrain hazards
Task Sequence
Task Sequence
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 25
Crew Interface (Teleop Mode)
Rover pathRover path
Motion
controls
Motion
controls
Terrain hazardsTerrain hazards Rover cameradisplay
Rover cameradisplay
Camera
controls
Camera
controls
3D View controls3D View controls
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 26
“Live” Rover Sensor and Instrument
Data (telemetry)
Crew Interface on SSC
K10 rover at NASA Ames
Data Communica ons (Ups i de- down Payl oad)
384 kbits/sec (min), 5 sec delay (max)Uplink
8 kbits/sec (min), 5 sec delay (max)
Downlink
384 kbits/sec (min), Out-of-Band
Uplink, data transferto laptop storage
Rover Task Sequence (text file)
Interface Instrumenta on & Evalua on Da ta
Post-test File Transfer
Rover/Science Data (e.g. imagery)
Note: Normal uplink ~1Mbps, spike a er LOS is ~2Mbps for 2 sec
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 27
K10 rover before dawn in the ARC “Roverscape”
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 28
K10 Planetary Rover @ NASA Ames
NASA Ames Roverscape
K10 Specifications• 4-wheel drive, 4-wheel steer• Split rocker chassis• Size: 1.3 x 0.9 x 1.0 m (HxWxL)• Speed: 0.9 m/s (on 10 deg slope)• Power: 1900 W (Li-ion batteries)• Weight: 100 kg (with 25 kg payload)
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 29
Telerobo cL unar Tel escope Depl oyme nt
K10 deploying simulated polyimide antenna.
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 30
K10 Deploys Kapton Film in Marscape
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 31
Chris Cassidy uses the “Surface Telerobo cs Wo r kbench”
Astronaut remotely operates K10 from the ISS (2013-06-17)
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 32
Astronauts Parmitano & Nyberg Operate K10 from ISS
PDF created with pdfFactory trial version www.pdffactory.com
Robotics Technology Development at Ames 33
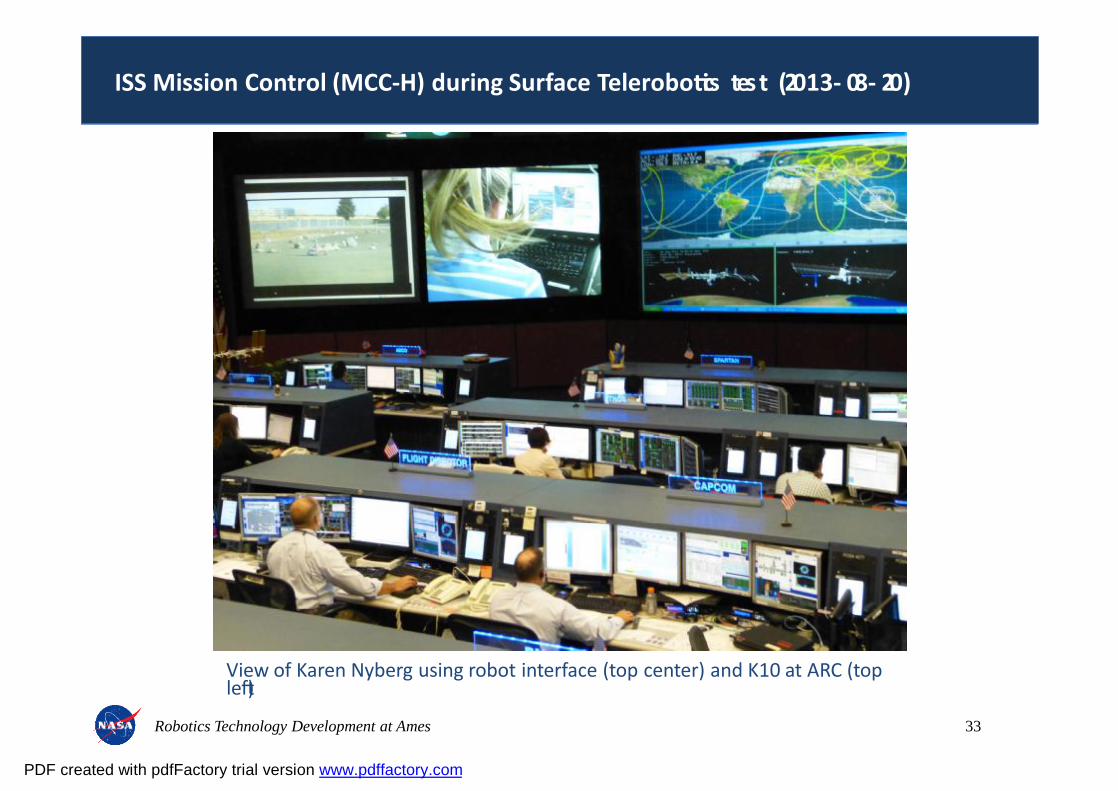
ISS Mission Control (MCC-H) during Surface Telerobo cs test (2013- 08- 20)
View of Karen Nyberg using robot interface (top center) and K10 at ARC (top le )
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 34
“PLUTO” Mul -Pur pose Suppor t Room at JSC
Provides data comm & crew laptop support
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 35
Mul -Mi ssi on Oper a ons Cent er (MMO C ) at ARC
Manages Surface Telerobo cs test sessi ons
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 36
K10 support team at ARC
Provides rover engineering & test logis cs
PDF created with pdfFactory trial version www.pdffactory.com

Robotics Technology Development at Ames 37
Ques ons?
Intelligent Robo cs Gr oup Intelligent Systems DivisionNASA Ames Research Center
irg.arc.nasa.gov
PDF created with pdfFactory trial version www.pdffactory.com





























