-
Rend. Sem. Mat. Univ. Poi. Torino Voi. 50, 1 (1992)
Singularities in G.R.
G.F.R. Ellis
I N T E R A C T I N G COSMIC S T R I N G S
A b s t r a c t . The pure gravitational aspects of interacting
cosmic strings are
investigateci, using an approach introduced by Hellaby (based on
use of the
conical approximation for each string). In this picture, the
result of the
intersection of two strings is that each of the interacting
strings becomes bent
through an angle equal to the deficit angle of the other one,
and a new string
is created, joining the places where each of the initial strings
has been bent
by the other. Formulae are given for the strength of this new
string, and for
the way the angles are perceived when the strings move at
relativistic speeds.
This analysis leads to identification of an irreversibility
associated with the
interactions of a cloud of strings.
1. Introduction
The gravitational aspects of cosmic strings are far from
straightforward; indeed they are somewhat surprising [1-5], despite
the fact that at their heart lies a simple description.
Straight strings are known to have a deficit angle structure
[6-8], and the deficit angle description is a good approximation to
the exterior fìeld of gauge strings, unless the string parameters
are very dose to the Planck scale [9]. Furthermore when the
energy-momentum of a string is concentrated on a 2-surface (the
zero-thickness approximation) and the space-time curvature is
sufficiently regular, this kind of conical structure is inevitable
[10]. It can be represented by cutting out a wedge from a locally
fiat space-time and identifying points [5,6], obtaining a
conical-type ("quasi-regular")
-
26
singularity [11] in the fiat space-time; we may cali this the
pure gravitational representation of a cosmic string (it makes no
attempt to model the field theory aspects of the string, but
exactly represents the exterior gravitational field of a straight
gauge string, and approximately that of other strings when viewed
at appropriate scales [1,10]).
While this conical structure has been emphasized in descriptions
of single strings, and indeed is centrai to proposals to search for
them observationally by their effect on light propagation in the
universe [12], most studies of interacting networks of cosmic
strings have concentrated on their field properties, neglecting the
implications of the deficit angle structure. The 'pure
gravitational' description has been used on the one hand in
investigations of pairs of cosmic strings which do not intersect
each other [5,13], leading to the discovery of causai violations
when the strings are in relative motion; and by Hellaby [14] to
investigate the interaction of cosmic strings, when they pass
through each other.
Hellaby obtains results that are strikingly different from those
obtained by field theory studies of such interactions in fiat
space-time, where the strings often break off and reconnect. He
finds that they do not break, but rather that new strings form
connecting the old ones, which become a bit bent in the process
[14].
While his basic approach is very elegant, his presentation is
reliant on spherical trigonometry formulae which somewhat obscure
the clarity of the basic idea. Here I gì ve a different formalism
for doing the calculations, as an alternative way of obtaining his
results.
2. The basic idea
The basic idea is illustrated by considering two strings.
Starting with fiat space-time, we cut out non-intersecting wedges,
one for each string, with the vertex of the wedge defining the
position of the string; and then simultaneously identify the pair
of faces of each wedge, to create the conical singularities that
will represent the gravitational effect of the strings [14]. Thus
the procedure is as usuai (see e.g. [5]); the new feature is that
the wedges are chosen at right angles to each other and moving
towards each other, so that although they are initially apart,
after a time they intersect each other.
-
27
When intersection has taken place, some parts of the base
space-time will have been (in principle) removed twice. This does
not matter; the resulting wedge faces are stili isometric to each
other and may be identifìed at each time (Fig. I1) to give the
final space (Fig. 22.) In this space there are two strings, joined
by a strut (where four lines are identifìed, forming the
intersection of the two planes in Figure 2). It will be our aim to
identify the nature of this strut; we will find it is another
string, linking the first two. Furthermore each of these two
strings gets bent by the other once they have intersected, as is
clear in figure 2, the points where they are bent being linked by
the strut3 .
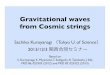
F i g u r e 1: Two wedges in Minkowski space time that approach
and intersect, shown in a spatial section {t=const} after they have
intersected each other. The intersecting strings are produced by
identifying the opposite pairs of faces of the two wedges. The
curve shown does • not intersect either wedge, and so is a regular
(closed) curve in fiat space.
Figure 2a of [14], reproduced with permission.
Figure 3 of [14], reproduced with permission. 3 We do not have
space to reproduce ali the relevant diagrams here; and recommend
perusing them in the originai paper [14].
-
28
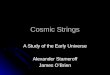
Figure 2: The string space produced by identification of the
pairs of faces in Figure 1. The curve shown is topologically
equivalent to that in Figure 1; it has been deformed to touch each
pair of faces in corresponding pairs of points, but stili lies
entirely in the originai fiat space (it does not cross any of the
identifìed faces) and so is equivalent, in parallel transfer terms,
to the originai curve in Figure 1.
This may seem obvious in Figure 2, however the analysis must be
treated with the utmost care. Although the space section shown in
each figure is locally fiat, it has non-local curvature because of
the conical singularities that result from this construction. As
demonstrated by Hellaby, we can fìnd the curvature properties of
the space by considering parallel transfer along the loop shown in
Figure 1, which lies entirely in the originai fiat space-time and
so is unaffected by the identifications macie to create the
strings. That is, parallel transfer is integrable and we have
parallelism at a distance in the obvious way as long as we do not
cross the identifìed sections (e.g. vectors
-
29
parallel to the axes remain parallel to the axes). Thus from
this figure we immediately derive parallel transport along any
curve that does not cross the identifìed faces. We can also
correctly work out what happens to parallel transfer along any
curve that does cross the faces as long as we carefully follow the
effect of the identifìcation.
Identification gives Figure 2, which gives a correct locai
picture of the bending of the strings; but global parallelism does
not hold in the obvious sense in this picture. For example, the
horizontal string is measured to be bent relative to parallel
transfer along a curve which crosses the identifìed face (due to
the deficit angle introduced by this identifìcation); thus
following the string along its own length, a kink occurs as it
crosses this face. However this string is found to be straight
relative to parallel transfer along a curve that never crosses the
identifìed planes, such as the curve shown in Figure 1. The same
holds for the curve in Figure 2 (which is equivalent, in parallel
transfer terms, to the curve in Figure 1, for it is obtained from
it by deformation in fiat space-time: it is just the same curve but
deformed to touch, but not cross, the faces of the wedges that have
been cut out).
One should note particularly that the planes shown in Figure 2
are surfaces where the originai coordinates (derived from figure 1)
will be discontinuous; but there is no locai problem with the
spaice itself at these surfaces, and there exist other locai
coordinates (implied in Figure 2 by the orthogonals to the planes)
which are perfectly regular across each of these surfaces
separately. It is in terms of such coordinates that we "obviously"
see that the string is bent. When crossing one of the surfaces,
locally there is no problem [as the ghie used to join the faces is
perfect and makes the join invisible].
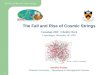
However now there is a deficit angle if we compare parallel
transport along a directed curve C\ that crosses the surface
relative to a directed curve 6*2 that does not (Figure 3). The
point here is that we can compare parallel transport along these
curves provided they both go through a point P before and Q after
going past the string, for these curves then create a directed loop
G = C\ — Ci around the string; parallel transfer around this loop
gives the difference between parallel transfer along C\ and Ci-
This difference will be a spatial rotation, equal in magnitude to
the deficit angle of the string, that can [on using the right-hand
rule relative to the direction of the closed loop] be represented
by an arrow parallel to the string, with length proportional
-
30
to the deficit angle. If we deform a loop through the edge of
the wedge, it will introduce this relative dilTerence in parallel
transfer (even though along each curve we simply have locally
parallel transport in fiat space time with no rotation, and with
nothing special happening on passing through the identified
Figure 3: Deiorming curve C
-
31
string inside. The final curve is a simple loop around the strut
connecting the bends in the strings. We can then form the total
effect of parallel transfer right around this loop that crosses ali
four faces by carefully transporting a vector Xa from an initial
point A back to A, obtaining back at A two copies of Xa: the one
parallel transported on the outside curves [parallel to the initial
value] and the one parallel transported along the inside curves
[that has crossed four faces]. We can consider this either in the
unidentifìed view [Figure 1] or the identified view [Figure 2]. As
the inner curve circles the strut once, it gives the deficit angle
of the string that has been constructed along the strut by the
intersection of the two initial strings.
The effect is equivalent to vector addition at one point (the
axes for this addition can be obtained by parallel transport of a
vector basis along the outside curve). The result is a non-zero
change because the inside vector gets a change A l [relative to the
outside vector] at face 1; thus at face 2, where it gets a change
A2, it is no longer orthogonal to the string. Thus we need to
calculate the total change to the vector that crosses ali the
faces, relative to a parallel propagated basis that does hot cross
any of the faces (and so is integrable). We can do so in practice
by starting witli an outer loop Oi, along which parallel
propagation is integrable (it is contained in a single Minkowski
patch). We shrink it through four edges of excised wedges, to give
the inner loop O2 that circles the strut once and gives the deficit
angle we require: the deficit angle of the newly formed string.
Each time we move the loop through an edge (i.e. through the
location of a string, by passing through the piane rather tlian
around it) we obtain a deficit angle for parallel propagation along
the inner loop relative to the outer loop. The total deficit angle
is obtained by adding tlies.e contributions (relative to a basis of
vectors parallel propagated along the outer loop).
In the remainder of the paper, we calculate this effect by using
an orthonormal basis in the originai coordinates [the Minkowski
space, unidentifìed, but with wedges removed]. Each deficit angle
corresponds to a spacelike rotation with axis the edge of the
wedge. We first look at the situa.tion in a 3-space [the rest space
òf an observer moving with 4-velocity ua], and then at the Lorentz
transformation properties of strings.
-
32
3. 3-space description
3 .1 . Single deficit angle
A string appears as a straight line with unit tangent vector Fa.
The spatial deficit angle holonomy [relative to the basis mentioned
above] is a rotation generated by the bivector
(1) Fab = eabcFc
where Faf, is a unit bivector (so the components form a skew
matrix with elements -fi» 0, or -1). We write the (finite) rotation
as
(2) Rab = exp(/3F)a
6 = 6* + 0Fab + ~P2F2a
b + ^/33F3ab + ...
where F2ab = Fa
cFcb, F3a
b = FacFc
dFdb, etc, and (3 is the angle of rotation
[it can easily be checked for example that this gives the
correct form for spatial rotations about the x-axis, when the
components of F^ are ali zero except F23 = 1 = — JF32]. We can
alternatively express (2) in terms of the bivector fai, generating
the rotation:
(3) Rah = ( exp / ) .* , /„» = 0Fab ^/3
2 = \fahfab.
3.2. Intersecting strings
Now we consider two wedges each with a deficit angle as above;
we use subscripts 1 and 2 to denote them respéctively, so the
rotation axes are F\a, F2 a , the bivectors -Fi^, F
-
33
where the signs of the rotation have to be taken in accordance
with the loop direction and the right hand rule (this is implied by
the use of the esymbol to relate the bivectors to the vectors).
3.2 .1 . Power series calculation
Now we use the power series expansion (2), keeping terms up to
the second order. The result (basically a standard result in
exponentials) is
(5) Tah = Sa
b + A / ^ F , , F2]ah + 0(f)
where the commutator [,] is defìned by
(6) [F1,F2}ab = Fla
cF2cb - F2a
cFlcb
showing how the effect comes directly from the non-commutativity
of the rotation group. Substituting from (1), we can re-expresn
this as
(7) [Fi,F2]ab = FlaF2b-F2aFlb = (F1AF2)ab,
Equation (5) gives the deficit angle generated by the strut, to
second order; this agrees with the calculation by Hellaby.
Naturally (4) gives a more correct result for large angles. However
in the cosmological context of cosmic strings, the deficit angle
will always be very small and the result (5) will be adequately
accurate.
The conclusion is that when two strings intersect, the result is
that each is bent by the deficit angle of the other, their bends
being joined by a new string with deficit angle (4) with (5) a good
approximation in the usuai context.
4. 4-dimensional formulation
4 .1 . Single string
Now a string is a 2-dimensional world-sheet. It can be
characterised by uni't orthogonal timelike and spacelike vectors
that span it, say va, Fa; then
(8) Fab = VabcdFcvd, vava .=' - 1 , F
aFa = 1, vaFa = 0
-
34
where these two vectors are arbitrary by a boost:
(9) v,a = cosh ip va + sinh ip Fa, F,a = cosh i/> Fa + sinh
ip va.
If an observer moves with 4-velocity va, (8) will reduce to (1)
above, but is now fully covariant. As this is a simple bivector
(Fabr}
a°cdFC(i = 0), an alternative representation is: there exist
unit orthogonal spacelike vectors Xaì Ya in the rest-space of v
a such that
(10) Fab = XaYb - YaXb, X.X = Y.Y = 1, X.Y = 0, X.v = Y.v = 0
.
These vectors are arbitrary by a rotation in their piane.
If an observer moves with 4-velocity ua, he will measure as a
deficit angle the rotation generated by the projection of fab =
fiFab orthogonal to his 4-velocity [for that defìnes the rest-
space within which the rotation takes place; the holonomy circuit
willbe in this rest space, and will pick out only these components
of the full tensor]. Thus he will measure the effective rotation
basis to be
(11) F±ab = ha'h^Fsu hab = gab + uaH
which is no longer a unit bivector. It can be rewritten as
(12) FLah = Fab -UarìhscdusvcFd + uwàtcrfvOF*.
The last two terms vanish if ua and v are coplanar with the
string, i.e. if the string is "at rest" relative to the observer
(or if the observer's 4-velocity is chosen to move with the
string); note that a velocity along the string is not measurable
(if ua lies in the piane of the string we can boost va to lie along
ua, and these relations will ali remain valid).
The exponential formula
(13) Rj = (exp f)ab, fab = PF±ab
will give the deficit angle experienced by an arbitrarily moving
observer (or equivalently, experienced by a "stationary" observer
due to an arbitrarily moving string); it reduces correctly to the
formulae above when the string and observer are at rest relative
each other. However it is useful to know more
-
35
explicitly the transformation properties of the deficit angles
under change of the observer's 4-velocity.
4.2. Velocity dependence
It is convenient to re-express F_\_ai in other ways. One
convenient option is to project (10) in the following way:
(14) F±ab = X X o y X 6 - Y±aX±b, XI = habX
b, Yl = habYb
(note that these vectors are orthogonal to each other and to ua
but are in general not unit vectors). This is again a simple
bivector, and we can express it relative to ua analogously to
(8):
(15) F±ab = r,abcdGcud, uaua = - 1 , G
aGa = 1, uaGa = 0 .
Now if we substitute in here from (8) and (11), and multiply by
riabstut, we find the rotation basis vector Ga in the rest-frame of
ua to be given by
(16) Ga = (-u.v)Fa +(u.F)va
(which correctly obeys the relation u.G = 0 and reduces to Ga =
Fa whenever ua = va). Thus this vector gives the axis of the
rotation as seen by the arbitrarily moving observer ua. The
magnitude /3' of the rotation will (using (8), (13), (15), (16)) be
given by
(17) /?'2 = l-fahfah = P2GaGa = f {(-u.v)
2- (u.F)2)
which shows explicitly the velocity dependence of the effective
deficit angle /3' on the observers' 4-velocity ua.
Because of the freedom (9) in choice of va and F in the piane of
the string, if we select one observer with 4-velocity ua and let
him watch arbitrarily moving strings go by (so that ua is fìxed but
each string has different va and Fa), then we can set the vectors
Fa to ali lie in the observers' rest-frame, without loss of
generality, by choosing
(18) tanhV> = (u.F)/(-u.v)
in each case, so that finally (dropping the primes)
(19) u.F = 0.
-
36
Equations (18), (19) give a unique choice of va and Fa in (8),
so defìning uniquely the velocity of the string relative to the
observer [by resolving the arbitrariness (9) of va in the piane of
the string).
With this choice, from (17) the eiTective deficit angle
becomes
(20) /?' = fi(-u.v) = h where 7 = (—u.v) is the Lorentz
transformation factor between ua and v a , determining the speed of
radiai motion of the string relative to the observer. As the choice
(19) uniquely fixes the velocity relation along the string, f3' is
in fact independent of the motion parallel to the string.
Relation (20) shows how, if the sky is filled with a random
pattern of strings moving at high speeds in ali directions, those
moving either towards us or away from us at high speed will appear
to havé greatly increased deficit angles, which would be observed
in lensing of more distant objects by these strings.
4.3. Interacting strings
When there are two interacting wedges, the deficit angle of the
strut can be calculated as before, by the same formulae (4) as
above (applied to the projected bivectors). The Lorentz
transformation results of the previous subsection will apply
independently to each string in a collision. The commutator formula
(5) above will apply to the projected bivectors, giving the strut
angle. The analogous formula to (6) and (7) in terms of the
projected bivector and the effective vector Ga will give the
observer's measurements.
5. Issues
When a network of cosmic strings continuously intersect each
other, we can use the same approach as used above for the case of
two strings. The conclusion is that each time they intersect, they
do not break; rather a new string is generated that links the other
two between the points where they have been bent by the collision.
The new string is weaker than the other two (if they have small
deficit angles and are slowly moving) but must be present for
consistency of the solution (otherwise the initial two strings
could not be bent by the collision, and this must happen because of
their deficit angle
-
37
nature). The new string can have a large deficit angle if the
two colliding strings are in rapid relative motion (even if their
intrinsic deficit angles, that is the angles evaluated in their
respective rest frames, is small).
An interesting point that then emerges is that there appears to
be an effect of increasing entropy associated with the string
collisions. This is indeed so: after each collision there will be
more strings present than before. Why is this so? The point is that
in principle we can undo the effect of a collision by reversing the
velocities after the collision has taken place, so undoing the
bends in each string and de-creating the strut (we run the
collision backwards in time, obtaining the previous initial state:
two separated strings). However to do so we have to get the
reversal of velocities exactly right. If we make any error
whatever, instead of undoing the strut we miss, and create yet
another new one. Thus the network of strings will in practice never
succeed in undoing any of the struts once they are formed: there
will be an ever increasing density of strings (admittedly of ever
decreasing deficit angles, but there ali the same, for without them
space-time singularities must occur). The existence of the new
strings is a consequence of the Regge calculus forni of the Bianchi
identities for conical singularities.
As has been emphasized, this is a pure gravitational view of the
interactions. Presumably (cf. the discussion given in [14]) real
strings have an interaction with some elements from this picture,
and some from the more usuai field theory calculations in a fiat
background, that ignore the conical singularities and the
consistency requirements that they impose.
I thank Charles Hellaby for useful comments, and the MURST for
finali ci al support.
REFERENCES
[1] V P . FROLOV, W. ISRAEL, W.G. UNRUH, Phys. Rev. D39 (1989),
1084. [2] C.J.S. CLARKE, G.F.R. ELLIS, J.A.G. VICKERS, Chss. Qu.
Grav. 7(1990),
1-14. [3] W.G. UNRUH, G. HAYWARD, W. ISRAEL, D. MeMANUS, Phys.
Rev. Lett.
62 (1989), 2897. [4] W. ISRAEL, Annales de Physique 14 Coli. 1
(1989), 109-114. [5] J.R. GOTT, Phys. Rev. Lett. 66 (1991), 1126.
[6] A. VILENKIN, Phys. Rev. D 23 (1981), 852.
-
38
[7] J.R. GOTT, Astrophys. Journ. 288 (1985), 422. [8] W.
HISCOCK, Phys. Rev. D 31 (1985), 3288. [9] D.N. VOLLICK, W.G.
UNRUH, Phys. Rev. D 42 (1990), 2621.
[10] J.A.G. VICKERS, Class. Qu. Grav. 7 (1990), 731. [11] G.F.R.
ELLIS, B.G. SCHMIDT, Gen. Rei. Grav. 8 (1983), 915. [12] A.
VILENKIN, Phys. Rep. 121 (1985), 263. [13] C. CUTLER, Phys. Rev. D
45 (1992), 487. [14] C. HELLABY, Gen. Rei. Grav. 23 (1991),
767.
George F.R. ELLIS, SISSA, Trieste, Italy,
and Department of Applied Mathematics, University of Cape Town,
South Africa.
Lavoro pervenuto in redazione il 28.2.1992.