Embed Size (px)
Citation preview

Future Combat Systems Future Combat Systems Unmanned Combat DemonstrationUnmanned Combat Demonstration
Soldier Task Loading ResultsSoldier Task Loading ResultsGary Kamsickas
2003 Intelligent Vehicle Systems Symposium
“Approved for Public Release, Distribution Unlimited”

2“Approved for Public Release, Distribution Unlimited”
AgendaAgenda
• Unmanned Platforms in FCS• Unmanned Combat Demonstrations
– Objective– Approach– Virtual Demonstration– Live Demonstrations
• Results

3“Approved for Public Release, Distribution Unlimited”
Unmanned Platforms in FCSUnmanned Platforms in FCSFCS ORD DefinitionFCS ORD Definition
C2V
Family of Systems (FoS)Common Requirements
Annex ABattle
Command (C4ISR)
Annex BLeader
Development
Annex C
Soldier
Annex D
MannedSystems
Annex E
UnmannedSystems
Annex F
Sustainment
Annex G
SystemsInterface
Annex HJoint
Interoperability
CombatSystems
ManeuverSustainment
Systems
MV
FRMV
ICV
LOS/BLOS(MCS) NLOS
Mortar
RSV
UAV UGVUnattendedMunitions
UGS
NLOS -LS
ARV
UAVClass 2
UAVClass 3
UAVClass 4
UAVClass1
MULE
Fire Team/Squad
MMR &HIMARS
EngineerVehicles
JTRS, WIN-T& DCGS-A
TSV &ASV
ACS &Prophet
CA/PSYOP& Vehicle
ArmyAviation &
A2C2S
CBRNRSFTTS &
UAH
SUGV
Annex I
Classified
Land WarriorBlock III
(OFW)
UnattendedSensors
IMS
NLOSCannon

4“Approved for Public Release, Distribution Unlimited”
Unmanned Platforms in FCSUnmanned Platforms in FCSUnmanned Ground Vehicle SystemsUnmanned Ground Vehicle Systems
Autonomous Navigation SystemSmall Man-Packable
Unmanned Ground Vehicle
Armed Robotic Vehicle
• 5-6 Ton Armored Vehicle• Speed: 40-90 kph• Shoot-on-the-move, Silent Watch• Type I “RSTA”, Type II “Assault”• Rapidly Shape Battlespace• Provide Force Protection• Self Employed
• 1- 2.5 Ton Utility Vehicle• Speed: 8-90 kph• Payload: 2000 lbs min.• Multipurpose capability
Multi-role Utility/Logistics Equipment (MULE) Platform
• Autonomous Navigation • For Unmanned & Manned Combat Vehicles
•20-30 lbs, 3-6 mph•Multiple Payloads•Shape MOUT & Sub-Terrainean Battlespace• Provide Force Protection

5“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationObjectiveObjective
Goals:
– Workload Analysis: Investigation of operator workload issues (ratio of operators to ARVs, stressful situations, maneuver, communication, level of autonomy, weapons engagement, RSTA)
– Live Demonstration Support: Support the exercise/scenario development, demo rehearsal and training of soldier crews
• Focus on real environment stressors, physical loading, “real” system mentality
– Requirements Verification: “May” be used to verify realistic and achievable performance parameters for ARVs.
– SDD Preparation/Risk Reduction:
• Provide basis of soldier control/ARV concept and technology maturity for FCS Block I.
• Validate Virtual Development Environment (VDE)/UCD SIL as resource for SDD.
Demonstrate the effectiveness of soldier-controlled remote unmanned ground Demonstrate the effectiveness of soldier-controlled remote unmanned ground vehicles, including RSTA and combat engagement, in a relevant tactical vehicles, including RSTA and combat engagement, in a relevant tactical
environmentenvironment

6“Approved for Public Release, Distribution Unlimited”
Unmanned Combat Demonstration Unmanned Combat Demonstration ApproachApproach
• Leverage/Reuse existing and near term assets, projects, demonstrations
– Enhance existing virtual capabilities– Use surrogate vehicles for live demonstrations– “Piggy-back” and share planned demonstrations
• Implement Army’s SMART (Simulation and Modeling Acquisition, Requirements and Training) Simulation Based Acquisition (SBA) concepts
– Combination of Virtual and Live exercises with a “Common Thread”• During the Virtual Demonstration, define the amount of human interaction
“Workload” required to operate an ARV• During the Live Demonstrations, validate the amount of human interaction
“Workload” required to operate a surrogate ARV• Use virtual and live demonstration results to calibrate/validate existing ARV
modeling tools• Focus on ARV Objective System, RSTA mission
– Objective capabilities for RSTA and Weapons

7“Approved for Public Release, Distribution Unlimited”
Unmanned Combat Demonstration Unmanned Combat Demonstration ApproachApproach
ScenarioDefinition
ScenarioDefinition
DataReduction
DataReduction
VirtualMan-in-the-loop
(UCD SIL)
VirtualMan-in-the-loop
(UCD SIL)
Live Maneuvers(Ft Bliss)
Live Maneuvers(Ft Bliss)
IMPRINTModelingIMPRINTModeling
DataReduction
DataReduction
DataReduction
DataReduction
Data•Comparison
•Analysis•Correlation•Anchoring
Data•Comparison
•Analysis•Correlation•Anchoring
Results &Conclusions
Results &Conclusions
Modify/Improve IMPRINT Models ?
Modify/Improve UCD SIL Models ?
Simulation Runs
SIL RunsSurveys
ExercisesSurveys
““Validation”Validation”
““Validation”Validation”
8“Approved for Public Release, Distribution Unlimited”
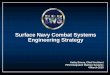
Unmanned Combat Demonstration Unmanned Combat Demonstration ScheduleSchedule
2002 2003Dec Jan Feb Mar AprNov May
Virtual Demonstration
Live Demonstrations
Development
Phase 2 (1: Many Ratio)
Vehicle Dev/ Integration
Vehicle C/O
VIP 3/7
Phase 1 (1:1 Ratio)
Soldier Training
IMPRINT Verification
UCD SIL Verification
Maneuver Demonstration
Live Fire Demonstration
IMPRINT Runs

9“Approved for Public Release, Distribution Unlimited”
Unmanned Combat Demonstration Unmanned Combat Demonstration ScenarioScenario
Small Arms Range
Cross Country Recon AreaActivity Point
Enemy Observation Post
Enemy Infantry
Obj. ARV (RSTA Unit)
Obj. CV
Tank Ditch
BTR80 Wheeled Armored Personal Carrier
BRDM-2 Anti Tank Recon
RA Restricted Area

10“Approved for Public Release, Distribution Unlimited”
Unmanned Combat Demonstration Unmanned Combat Demonstration ImImproved proved PPerformance erformance RResearch esearch InIntegration tegration TToolool
• Workload on each crew station is modeled, implementing scenarios used in the demonstrations.
• Expect data from demonstrations to help refine IMPRINT models only at the trend level, due to limitations of demonstration environment and breadth of the experiment.
• IMPRINT; Developed by ARL-HRED, in use since 1995
• Successfully used in Comanche, Crusader, OOTW, FCS and other programs.
• A network modeling tool, used to identify soldier-driven constraints on system design and evaluate the capability of available manpower.
Scenario 1: Commander
0
5
10
15
20
25
30
35
40
45
50
0 500 1000 1500 2000 2500
Time (seconds)
Inte
gra
ted
VA
CP
Series1

11“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationCrew StationCrew Station

12“Approved for Public Release, Distribution Unlimited”
Unmanned Combat Demonstration Unmanned Combat Demonstration Virtual Demonstration System – UCD SILVirtual Demonstration System – UCD SIL
CAT VirtualProcesses
OneSAF
A-KitInterface
B-Kit (ESS)
Ethernet
DIS Data (V2.04)
PIU CommData
B-KitInterface
Crewstation 1
Crewstation 2
Control Vehicle (CV)
Eth
ern
et
A-Kit/B-Kit ICD
VideoCamera
Data Collection/Visualization Video & Audio
After Action ReviewStealth ViewBattlefield View
SMI Data
Embedded Simulation System (B-Kit)
•Observations•Surveys•Interviews

13“Approved for Public Release, Distribution Unlimited”
ARV-1 Surrogate
Unmanned Combat DemonstrationUnmanned Combat DemonstrationLive Maneuver ConfigurationLive Maneuver Configuration
CV Surrogate
•Stryker Platform (CAT VTI)• Mobility (~16T)• CV driver (Safety)• 2 Crew Stations (ARV controllers)• C2• Weapon and RSTA Control
•Stryker Platform (CAT VTI RF)•Mobility (~16T)•Semi Autonomous Nav.
C2 Station (Battle Master)
ARV-2 Surrogate
•Platform (Demo III ARL XUV)• Mobility (~2.5T) • Semi Autonomous Nav.
ESS (B-kit)• Targets (stationary)• Mounted & Dismounted• Virtual Weapons and RSTA• Virtual Env. (OneSAF)
14“Approved for Public Release, Distribution Unlimited”
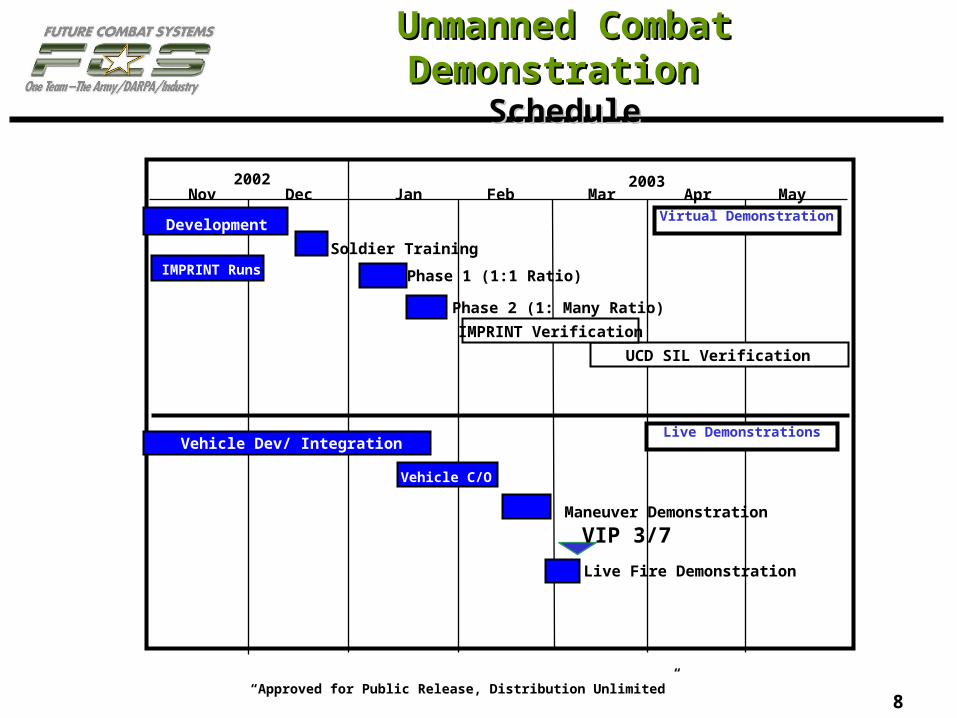
Unmanned Combat DemonstrationUnmanned Combat DemonstrationLive Fire ConfigurationLive Fire Configuration
TargetsDismounted - Silhouettes
Mounted – M113
ARV-1 Surrogate
CV Surrogate
Surrogate C3 Network• RSTA•Target Cueing•Weapon Control
Common Ops Picture
ARV-2a Mobility Surrogate
HunterKiller
ARV-2b RSTA Surrogate
Control
• COUGAR Turret•Target Acquisition •Javelin and M240
• Safety Driver• Weapon Arm Switches

15“Approved for Public Release, Distribution Unlimited”
Unmanned Combat Demonstrations Unmanned Combat Demonstrations UCD Live Weapon Fire Demo ScenarioUCD Live Weapon Fire Demo Scenario
+
X 1
X 2
X 3
X 4
PL Chevy
PL Ford
PL Hummer
(RSTA Waypoint)
Zone Orange
Assembly Area
Viewing Area – 5Km
OBJ Yukon
LD
LD
SP
CV OBS PT +
X 1
X 2
X 3
X 4
PL Chevy
PL Ford
PL Hummer
(RSTA Waypoint)
Zone Orange
Assembly Area
Viewing Area – 5Km
OBJ Yukon
LD
LD
SPSP
CV OBS PT

16“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationResults – Virtual EnvironmentResults – Virtual Environment
Significant Insight Implication
IMPRINT established a workload baseline showing relatively flat workload results, and not typically close to overload, which was expected. (1:1 soldier to ARV ratio)
Used to establish benchmarks for expectations during Virtual and Live Demos. Results from demos will be used to calibrate IMPRINT models.
IMPRINT workload peaks occur while dealing with obstacles or engaging with enemy vehicles.
Identified operator tasks that needed to be focused on during the Virtual and Live Demos.
Soldiers learned to operate system quickly – very short learning curve
Crew station useful as baseline starting point for follow-on SMI development.
Data collection strategies worked well in virtual demonstration.
Approaches useful for future demonstrations and analysis efforts.
Workload influenced by “realism” issues. The virtual experience treated like a video game.
Virtual Demos have their limitations and cannot fully replace Live Demos. Live Demo results will be used to “calibrate” the virtual environment

17“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationResults – Virtual EnvironmentResults – Virtual Environment
Significant Insights Implication
Tele-operation during Virtual Demo was not a significant event. The virtual version of the Ft. Bliss maneuver range is relatively benign with no non-traversable terrain, so operators drive at maximum speed without regard to terrain.
Workload studies without motion-based crew stations biases results. Different terrain types using real platforms or improved models are necessity.
Soldier “bravado” and can-do attitude have impact on survey/interview responses.
In several cases soldiers were clearly overloaded but were reluctant to admit a weakness or shortcoming.
Well defined CONOPS, TTPs and strategies do not exist for the operation of UGVs
Workload and design of UGVs will be influenced by CONOPS and TTPs
There was no “time pressure” in relation to completing tasks. No standard for comparison or basis of performance.
Task time constraints will influence workload. Established TTPs required to determine realistic or acceptable task timelines.

18“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationResults – Live EnvironmentResults – Live Environment
Significant Insights Implication
Time to complete a “live” scenario is significantly greater than a virtual scenario
Plan shorter, task focused activities. Safety/maintenance routines take time. Resolving problems in the field is time consuming. Pessimistic planning is best.
Data collection during “live” maneuver demonstration was more difficult due to lack of real-time view of the soldiers.
Plan for real-time video or an “in-vehicle” observer area for live demonstrations. You need to see and hear the soldiers.
Workload was influenced by “live” system characteristics such as natural environment, fatigue, communications loss, and performing tasks “on-the-move”
Motion effects, monotony/repetitiveness of tasks, system stability/problems, weather, mood/attitude, periods of confinement, etc. affect workload and overall stress on the soldier.
Workload influenced in “live” system by “damage risk” to real equipment.
Soldiers were more cautious in using the real equipment than in the virtual environment. Fear of breaking something.

19“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationResults – Live EnvironmentResults – Live Environment
Significant Insights Implication
Live/Virtual mix in maneuver demonstration was functional but had its own set of problems and issues.
Extra testing/dry run time for demonstrations that include a mix of live and virtual environments required. Many unique issues.
Mission Planning tasks were consistently identified as “most difficult” during the entire UCD effort.
Mission Planning identified as an area for potential improvement
Soldiers had a preference toward tele-operation in the virtual environment and AM in the live environment.
Soldier preference was based on speed and risk. The AM proved faster in the live environment.
UCD “Live Fire” Demonstration has opened the door to the safety issues involved in combining autonomous mobility of armed vehicles.
Must actively work acceptance, trust and system safety issues for armed robotic assets within the Army during SDD

20“Approved for Public Release, Distribution Unlimited”
FCS Risks Mitigated by UCDFCS Risks Mitigated by UCD
FCS Risks Insights Implications to SDD
Planning and execution of UCD, to meet constrained schedule, required leverage/reuse existing and near term assets, projects, demonstrations.
• Team building between Government agencies and Industry• Need for coordination between Non-FCS demos to ensure complimentary objectives.• Need for early safety community involvement in demo planning• Robust safety approaches for operation of operational unmanned platforms need to be developed
Live Fire Demo using surrogate CV and ARVs performing a representative mission in a realistic environment showed the soundness of the concept and the maturity of the technologies.
• Reduced robotics perception problems• Integrated surrogate architecture to perform Mobility, RSTA and Fire Control.
– ANS integration onto 16T platform– Remote Weapon Fire from SMI

21“Approved for Public Release, Distribution Unlimited”
FCS Risks Mitigated by UCDFCS Risks Mitigated by UCDFCS Risk Insight – Soldier to ARV RatioFCS Risk Insight – Soldier to ARV Ratio
• Soldiers had no problem controlling a single ARV– Soldiers performed cooperative planning to use each other’s asset– Soldiers said no single event (RSTA, Weapons, Tele-op) was significant to workload– Performed “housekeeping” tasks during non-active time.
• 1 Soldier controlling 2 ARVs– Soldiers seemed realistically capable of controlling two assets– Soldiers still coordinating as a team but also using own assets as a “team” (e.g. bounding over
watch)– Lack of well defined TTPs becoming apparent
• 1 Soldier controlling 3-4 ARVs– Soldiers thought they could handle. A drop in situational awareness was apparent.– As number of ARVs increased, team coordination decreased. Soldiers were focused on controlling
their “team” of ARVs.– No “extra” time for house keeping– Soldiers seldom handed off an asset to partner who was not loaded. “Stopped” other ARVs when
one ARV was task loaded.– Lack of CONOPS, strategies and TTPs for robotic assets very apparent

22“Approved for Public Release, Distribution Unlimited”
FCS Risks Mitigated by UCDFCS Risks Mitigated by UCDImplication to SDD – Soldier to ARV RatioImplication to SDD – Soldier to ARV Ratio
• Increased definition of Soldier-to-Vehicle collaboration issues.– Vehicle to Vehicle collaboration (Block 2)
• Burden of ARV Integration into Squads lowered• Interviews indicate that mission planning is the most demanding activity,
need to focus attention on aids to assist in planning.• Soldiers indicate they want to have improved situation awareness, which will
put a greater demand for communications bandwidth / technologies / techniques.
– Improved tie into CROP needed in the future.• Vigilance required to recognize incoming targets from AiTR, improved AiTR
required.– More robust ATR for Block 2
• Soldiers impressed with crew station capabilities, said that they definitely felt that this type of system would “reduce risk and save lives”
• Soldiers provided a great deal of constructive inputs for changes• Developed insight to draft set of TTPs

23“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationSummarySummary
Demo Phase
Virtual Live Maneuver
Live Fire
Date 7-23
Jan 03
17-25
Feb 03
3-7
Mar 03
# of Crews 2 2 1
# of Scenarios
26 8 1
Cntl. Time
(Per ARV)130
hrs
48
Hrs
12
hrs
Distance Traveled
(Per ARV)
364
km
40
km
18
km
Ratios Tested
1:1, 1:2
1:3, 1:4
1:1 1:1
Jan
Feb
Mar Feb
Mar
1 2 3 4 5
1
2
3
4
5
Co
nse
qu
ence
1 2 3 4 5
1
2
3
4
5
Probability
Co
nse
qu
ence
RISK MITIGATION
Semi-AutonomousManeuver
CombatFunctionality
WarfighterWorkload
Jan
Feb
Mar Feb
Mar
Jan
Feb
Mar Feb
Mar
1 2 3 4 5
1
2
3
4
5
Co
nse
qu
ence
1 2 3 4 5
1
2
3
4
5
Probability
Co
nse
qu
ence
RISK MITIGATION
Semi-AutonomousManeuver
CombatFunctionality
WarfighterWorkload
Jan
Feb
Mar Feb
Mar
• UCD Successful• Reduced/provide insight for FCS SDD risk• Provided basis for soldier workload issues• Provided tools for additional analysis
• Virtual + Live gives best results• Virtual provides flexibility• Live provides realism focus, validation

24“Approved for Public Release, Distribution Unlimited”
Unmanned Combat DemonstrationUnmanned Combat DemonstrationTeamTeam
•Javelin Missile Data Coordination•Javelin Missile/M240 SME•COUGAR Turret/Integration•Weapon Fire Range/Demo Support
•Embedded Simulation System Development
•Workload Analysis Support•Usability Analysis Support•Demo III RSTA Vehicle
•Demonstration Management, Coordination, Execution and Reporting
•SMI Design and Test•Imprint Model Development•Data Collection Support•Demonstration Support
•Crew Station Development•Crew Station Integration and Test•Maneuver Range/Demo Support•Live Demo Vehicles
•Imprint Model Execution and Data Analysis•Workload Analysis•Data Collection Support
•Management of UCD SIL Development•Embedded Simulation System Development•Demonstration Facility Coordination•Maneuver Range/Demo Support•Live Demo Vehicles
•SMI, Scenario and TTP Review•Soldier Support