Embed Size (px)
Citation preview

Fourier-BasedForwardandBack-Projectorsfor Iterative ImageReconstruction
SamuelMatej, Jeffrey A. Fessler and IvanG. Kazantsev
Universityof Pennsylvania,MIPG TechnicalReportMIPG303
Universityof Michigan,EECSTechnicalReport
May 2003

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 2
CONTENT
1. Introduction2. PrinciplesandImplementaion
A. Fourier-BasedProjectorsB. Non-UniformFastFourierTransformC. Fourier-BasedIterativeReconstructionD. Emulationof ImageRepresentationUsingBasisFunctionsE. ResolutionModelingF. Min-max InterpolationOptimization
3. NumericalErrorAnalysisResults4. ComputerSimulationResults
A. Forward-ProjectorB. Back-ProjectorC. ForwardandBack-Projectorwithin Iterative Reconstruc-
tion5. IterativeReconstructionusingRealData6. Discussion7. ConclusionsReferencesAppendix
A1. TheoreticalErrorsA2. ZubalPhantomForward-ProjectionErrorsA3. ZubalPhantomBack-ProjectionErrorsA4. Voxel andBlob-basedReconstructionErrors
Abstract— Iterati ve image reconstruction algorithms play an increas-ingly important role in modern tomographic systems,especiallyin emissiontomography. With the fast increaseof the sizesof the tomographic data,reduction of the computation demandsof the reconstructionalgorithms isof great importance. Fourier-basedforward and back-projection methodshave the potential to considerablyreducethe computation time in iterativereconstruction.Additional substantialspeed-upof thoseapproachescanbeobtained utilizing powerful and cheapoff-the-shelf FFT processinghard-ware. The Fourier reconstructionapproachesarebasedon the relationshipbetweenthe Fourier transform of the image and Fourier transformationof the parallel-ray projections. The critical two stepsare the estimationsof the samplesof the projection transform, on the central sectionthr oughthe origin of Fourier space,fr om the samplesof the transform of the im-age,and vice versa for back-projection. Interpolation errors are a limita-tion of Fourier-basedreconstruction methods. We have applied min-maxoptimized Kaiser-Besselinterpolation within the non-uniform Fast Fouriertransform (NUFFT) framework. This approach is particularly well suitedto the geometriesof PET scanners.Numerical and computer simulation re-sultsshow that the min-max NUFFT approachprovidessubstantially lowerapproximation errors in tomographic forward and back-projection thanconventional interpolation methods, and that it is a viable candidate forfast iterative imagereconstruction.
Keywords— Iterati ve tomographic reconstruction, forward and back-projectors,non-uniform FFT, gridding, min-max interpolation.
I . INTRODUCTION�TERATIVE imagereconstructionalgorithmsusingstatisticalmodelsof acquireddataplay an increasinglyimportantrole
in moderntomographicsystems,especiallyin emissiontomog-raphycharacterizedby datawith low counts,andconsequently,low signal-to-noiseratio[1–3]. Thecomputationalbottleneckofiterativereconstructionalgorithmsis thecomputationof forwardand back-projectionoperations. With the fast increaseof thesizesof thetomographicdata,reductionof thecomputationde-mandsof forwardandback-projectorsis of greatimportance,asdemonstratedby therecentincreaseof interestin fastcomputa-
tional proceduresfor calculationof theseoperations(for exam-ple, [4–9]). Thecontribution of this paperto thoseendeavorsisthe investigationof Fourier-basedforward andback-projectorsfor iterativetomographicreconstructionapproaches.In additionto their computationalefficiency, theFourier-basedapproacheshave potential for additionalsubstantialspeed-upby utilizingpowerful andcheapoff-the-shelfFFT processinghardware.
It hasbeenknown for a longtime thatdirectFouriermethods(DFM), that build up the Fourier transformof the objectusingtheFourier transformsof theprojections,have thepotentialforaccurateandhigh speedreconstruction[10–15]. The Fourier-slice theoremwas later proposedasa tool for performingthereprojectionoperation(e.g., [16,17]). The crucial step influ-encingthe reconstructionquality andspeedis the interpolationbetweenpolar andCartesianrastersin frequency space.Grid-ding interpolation[18,19], with properinterpolating[20] anddataweightingfunctions,as investigatedin the MRI literature[21–23], broughtimprovementin thedirectFourierreconstruc-tion. Recently, theFourier-basedreprojectionhasbeenappliedfor (non-iterative)fully 3D PETreconstruction[24] andfor cal-culationof attenuationcorrectionfactorsin PET [25]. In theseworks, Kaiser-Bessel(KB) windows were usedfor interpola-tion, whichareknown to bereasonablyaccuratebut withoutex-plicitly evaluatingtheaccuracy. Theconceptof thenon-uniformFastFourier transform(NUFFT) [26] usedin this paperis re-latedto gridding methodsfor interpolationin frequency space.TheKB interpolationkernelsusedin this work have beenopti-mizedusinga min-maxapproach[27], thusproviding substan-tial improvementof theinterpolationaccuracy.
In the previous works on gridding, the focus was on us-ing the interpolationto find a non-iterative approximatesolu-tion to an inverseproblem. In contrast,we useFourier-basedforward-projectionasatool for calculatingtheforwardproblem,andallow iterative reconstructionmethodsto solve the inverseproblem. Iterative algorithmsneedalsothe ability to computematrix-vectormultiplicationby thetransposeof thematrix cor-respondingto forwardprojection,eventhoughthematrix itselfis not storedexplicitly. It is straightforward to reverse(not in-vert) the stepsexecutedduring the forward-projectioncompu-tation to developanalgorithmto performmultiplicationby thetranspose,correspondingto theadjointof theforwardoperator,which is a form of back-projection.
Section II containsdescriptionsof basic principles of theFourierbasedforwardandback-projectors(II-A) andof theiref-ficientimplementationusingNUFFTapproach(II-B), anoutlineof the iterative reconstructionapproachesusing Fourier basedforwardandback-projectors(II-C), discussionof incorporationof basisfunctions(II-D) and resolutionmodels(II-E), and fi-nally discussionof optimizedNUFFT interpolationparameters(II-F). Resultsof thenumericalerroranalysisof theNUFFT in-terpolatorsbasedon the min-max methodologyare presentedin Section III. Effects of interpolationparameterson accu-racy of theNUFFT-basedforwardandback-projectors,asstan-dalonemodulesandwithin iterative reconstruction,arefurtherevaluatedusingsimulateddatain SectionIV, includingperfor-mancecomparisonsof the optimizedversionsof the Fourier-basedforward and back-projectorsto their space-basedcoun-terparts. SectionV containsperformancecomparisonsof the

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 3
Image x Projection data pData spectrum PImage spectrum X
�� �� �� �� �� �� � �� � �� �� �� �� �� �� �� �� �� �� �� �� ��1D IFFTs2D FFT Interpolation
Fig.1. Basicstepsof theNUFFTforward-projectionillustratedonthe2D case:1) point-wisemultiplicationof theimagewith theScalefunction- pre-compensationfor interpolationimperfections;2) FastFourier Transformon uniform (rectangular)rastersfrom imageinto spectrumdomain;3) spectrummultiplicationbyBasisfunctionfilter - modelingeffectsof theimagerepresentationusingbasisfunctions(II-D) andof theshift-invariantdetectorresolutionkernels(II-E.1, forotherpossibilitiesof resolutionmodelingseetext); 4) Interpolation into non-uniform(polar)dataspectrumrasterlocations- convolution with the fixedsizeinterpolationkernel;5) InverseFastFourier Transformsonsetof polarlinesto obtainasetof projections(sinogram).
Fourier-basedandspace-basedprojectorswithin iterativerecon-structionusingphysicalphantomtransmissiondataacquiredona commercialPETscanner. Finally, discussionandconclusionsarein SectionsVI andVII.
I I . PRINCIPLES AND IMPLEMENTATION
A. Fourier-BasedProjectors
Fourier basedforward andback-projectorsarebasedon thecentralsectiontheorem(alsocalledprojectiontheorem)asout-lined in thefollowing. Werepresentstraightlinesin ��� ( =2,3)by a direction !#"%$&�('*) (unit sphere),anda point +,"-!/. as0 +21%34!65�37"%� )98 , where ! .;: 0 +#"%� � 5<+>=?! :A@98 . LetBDCFEHGJIKE "L�<� denotethe - dimensionalimagewhoseprojec-tions(theray transform)MON C + G :QPR*S BDC +T1634! GVU 3 (1)
wewishto compute.Let W CYXZG betheimagespectrum,obtainedby FouriertransformW CYXZG : PRO[ BDCFEHG]\ 'O^`_ba?c/d e U/E�f (2)
Thenthecentralsectiontheorem[11] is givenbyg N CihZG : W CihZGjIKh "k! . I (3)
whereg N CFhZG is Fouriertransformof
MON C + G .Usingthecentralsectiontheorem,theprojectionat direction! andasa functionof + , canbeobtainedfrom the imagespec-
trum W N CFhZG : W CFhZGjIlh "m!/. byMON C + G :nPNpo W N CFhZGV\ ^`_ba/qDd r Ushtf (4)
Alternatively, using the sameapparatusin reverse,the back-projectioncanbeobtainedby depositingthe Fourier transformof the projection into the proper locationsof the centralsec-tion of the -dimensionalspectraldomain,followed by the -dimensionalinverseFouriertransform.
B. Non-UniformFastFourier Transform
Practicalimplementationof Fourierprojectorsis basedonthediscretizedversionof theprojectiontheorem.Thecrucialstepisobtainingsamplesof projectionspectrumvalues
g N CFhZGvu qxwzys{}| ,where $~"��T�('H) ( � denotesinteger numbers),distributedonthe centralsectionplanes !s. with grid spacing � q (formingthe polar rasterin 2D case)from the valuesof the samplesofimagespectrumW C4XZGpu exw*�D{�� , ��"m��� , distributedontheuni-form Cartesianrasterwith spacing� e (forming therectangularrasterin 2D case).Directevaluationof imagespectrumvaluesatthecentralsectionlocationsusing(exact)DiscreteFouriertrans-form (DSFT)wouldrequire� Ci���?G operationsfor the2D imageof size ����� . Using Non-Uniform Fast Fourier Transform(relatedto gridding) allows utilization of Fast FT algorithmsthussubstantiallyspeeding-upthisprocess.For the2D case,theNUFFT projectorsrequireonly � CF� _z���/� �LG operations,com-paredto � CF����G neededby thespatialforward-projectionalgo-rithms.Basicstepsof theNUFFT are(seeFig. 1):a) imageof size � is first pre-compensated(scaled) for imper-fectionsof thesubsequentfrequency domaininterpolation;b) calculationof the � -timesoversampled(in eachdirection)FFT - imageis zeropaddedbeforetheFFT (for theefficient im-plementationof theoversampledFFT see[12,27]);c) interpolationonto thedesiredfrequency locationswithin thecentralsectionof thespectrumusingsmalllocalneighborhoodsin thefrequency domain- this is acrucialoperationdeterminingtheNUFFTaccuracy.The resultof thesethreestepsis theNUFFT, andforwardpro-jectionsare thenobtainedby performinginverseFFTs on thecentralsectionsamples(polar lines in 2D case). The discreteback-projectionrepresentsthe samesetof operationsexecutedin thereverseorder. Fourierbasedforwardandback-projectorsfor the statisticalreconstructiontechniquesshouldadditionallytake into accountthe shapeof basisfunctionsusedfor imagerepresentationandresolutionproperties(e.g.,LOR profiles)asdescribedin SectionsII-D, II-E.
C. Fourier-BasedIterativeReconstruction
Forward and back-projectionoperationsrepresentthe com-putationalbottleneckswithin any iterative reconstructionap-

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 4
�� �� ���� � � ¡¢ £¤ ¥¦ §¨ � ©ª «¬ £¤® ¯° §¨ � � ¡¢ ±²³´ §¨ £¤ µ¶ «¬ ·¸ ¹º
»¼ ©ª ¹º ¯° ±² ¡¢ ½¾ §¨ £¤ ¯° ¿À
p(k) P(k)
∆∆(k)
b
x(k)
cs(k)
Á ½¾ µ¶ §¨ � ¡¢X(k)
C(k)ÃÄ §¨ ¹º ©ª ¹º ÅÆ ¥¦ £¤ ¯° � ©ª «¬ £¤ ÅÆ ©ª ÇÈ � ¡¢ ±²��
�� �� �� ��ÉÊ £¤ � ¡¢ ±² ½¾
ÉÊ £¤ � ¡¢ ±² ½¾Data
Image
x(0)
δδ(k)
Back-projection
Forward-projection
c(k) ËÌ ¯° §¨ ÇÈ ¡¢
xs(k) ËÌ ¯° §¨ ÇÈ ¡¢
Fig. 2. Flowchartof iterative reconstructionusingFourier-basedforwardandback-projection.ÍÏÎÑÐbÒVÓJÔiÕ?Öv×sÒ]Ø and ÙOÕ?ÚpÖvÛÑÔ operatorsaredefinedby a particulariterative technique. For the 2D case,the Fourier transformationsare 1D (I)FT of projectionson datasideand 2D (I)FT on imageside. ÜJ×sÛÑÔbÓ4ÕÞÝlß�ÖpÛàÎàÝl×operationsareperformedbetweendata(polar) and image(rectangular)spectrumgrids. áKÒ]ÖâßãÔ , alsoknown asthe “correction function” in the gridding, isscalingoperation,wherethescalingfactorsaredesignedto compensatefor imperfections(departurefrom theidealSincinterpolation)in theinterpolationstep.ä ÖâÐåÎàÒåæ�ç?×(ÒVÛàÎàÝl×(æèÎéßãÛÑÔåÓ is spectraloperationallowing efficient modelingof the imagerepresentationusingbasisfunctions(II-D) andof the shift-invariantdetectorresolutionkernels(II-E.1, for otherpossibilitiesof resolutionmodelingseetext).
proach. The generalflowchart of iterative reconstructioninwhich theoperationsof forwardandback-projectionweresub-stitutedby their fast Fourier-basedcounterpartsis depictedinFig. 2. Specificiterative algorithmswill be distinguishedonefrom anotherby uniquediscrepancyandupdateoperators.Notethat the Fourier basediterative techniquesdo not requirespe-cial treatmentof any missingportionsof the data,similarly tospatial-basediterative approachesbut unlike the transformre-constructionapproaches(3D RP [28], 3D-FRP[24]) which dorequireestimationof missingportionsof thedatabeforebeingemployed. In the Fourier-basediterative approaches,the dis-crepancy operatorwill providecompletecorrectiondatavectors(to be Fourier transformed),including valuesindicating “no-discrepancy” (e.g.,1 for ML-EM, 0 for RAMLA) in theregionsin which datawere not measured.Theseare valid valuesforthe back-projectionoperatorand result in “no-change”back-projectionfor the corresponding(data)regions,similarly as itwouldbedonein thespace-basediterativemethods.
Within thefastFourier-basedapproachesmostof thecompu-tationtime is spentby thecalculationsof theFouriertransformson dataandimagegrids. For bothforwardandback-projectionoperationsof Fourier-basediterative techniques,the (inverse)Fourier transformationof the image(spectrum)hasto be doneonly onceper ê -th imageupdate(i.e.,periteration,or datasub-set)makingit desirableto uselargesubsetsizesfor block-typealgorithms. On the otherhand,the large subsetsizestypicallyrequiremorepassesthroughthe data(iterations). It is easytoshow that for linearalgorithmsthediscrepancy operator(basedon datadifference)andupdateoperator(basedon additive op-eration)canbe moved into the Fourier domain,thuseliminat-ing the needto do FFT calculationson imageanddatarastersat eachimageupdateandconsequentlyeliminatingtheneedtouselarge subsetsizes. However, typical statisticalreconstruc-tion approachesfor emissiondataare not linear. Fortunately,thespeed-upbroughtby theFourier-basedapproachesmakesitpossibleto useincreasednumberof iterations,comparedto the
space-basedapproaches,while still providing clinically practi-cal timeseven for the big subsetsizes. Additional substantialspeed-upof the Fourier-basedapproachescan be obtainedbyusingrelatively cheapoff-the-shelfFFT processorboards.
D. Emulationof ImageRepresentationUsingBasisFunctions
In theconventionalspace-domainiterativealgorithms,there-constructedimageis usuallyrepresentedby a setof coefficientsof basisfunctions(e.g.,pixels,or blobs[29]), ratherthanby theset of imagesamples. The valuesof continuousimage B�CÑE*G ,E "#�<� , arethenobtainedfrom coefficients U/ë , where ì repre-sentsthe discretesetof locations E : ì?� c , of basisfunctioníxCÑE*G by BDCFEHG :ïîëJð?ñ [ U ë íxCÑEóò ì?� c Gjf (5)
If the basisfunctionsarespatially invariant (the typical case),theNUFFTprojectionsthroughtheimagecomposedfrom thosebasisfunctionscanbe emulatedby includinga properspectralfilter into theNUFFT path(Basisfunctionfilter in Fig. 2). Thefiltering is donesimply asmultiplication by the basisfunctionspectrumô C4XZG . Amongthemostpopularspatialbasisfunctionsaresquarepixelsor rotationallysymmetricKaiserBesselbasisfunctions(blobs)in the2D caseandcubicvoxelsor spherically-symmetricblobsin the3D case.
E. ResolutionModeling
A discretizedversionof theFourier-sectiontheoremprovidesdiscretesamplesof the (continuous)projectionfunction
MõN C + Gwhich might beanover-simplifieddescriptionof themeasureddatain many tomographicapplications.Iterative reconstructionapproachesprovide convenientways to include more realisticdataacquisitionmodels. In the following, we describepossi-bilities of incorporationof thosemorerealisticmodelsinto theFourierbasedforwardandback-projectors.

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 5
KB profiles - J=6, m=0, K/N=2
0
0.25
0.5
0.75
1
0 0.5 1 1.5 2 2.5 3
Radius
KB
Val
ue
alpha_-, alpha/J=2.00alpha_o, alpha/J=2.34alpha_+, alpha/J=2.50alpha_s, alpha/J=3.08
Fig. 3. Profilesof four Kaiser-Besselinterpolationkernelsof size öZ÷kø usingoptimum(alpha o) andsuboptimumparametersfor ù-÷mú and ûTü]ý6÷kþ .alpha - andalpha + representtwo suboptimumKB kernels( ÿ parameterlocatedon bothsidesfrom theoptimum- starsymbolsin Fig. 5) providingcomparablemaximumerrors,which areabout6.5-timeshigherthanin theoptimumcase.For comparison,we show alsoalpha s representingtypicalKB window having desirablepropertiesfor thespatialimagerepresentation[30], but poorperformanceasthe interpolationkernel. It is interestingthatalthoughall of themhave similar shape,they provide quitedramaticdiffer-encein theNUFFT performance.
E.1 Shift-invariantdetectorresolutionmodel
Assumingthat the detectorresponsecan be modeledby ashift-invariant blur with impulse response� C + G , with corre-spondingfrequency response� CFhZG , the measureddata � canbeapproximatedby��N C�� � r G : C ��� M N GpC�� � r G : PNpo � CFhZG g N Cih2G]\ ^�_laÞqDd �V{ U/htI (6)
where � r is detectorsamplingunit, � "�� �9'H) . The detectorblur canthusbemodeledby simplemultiplicationof spectrumof the data,or image,by � CFhZG . Typical examplesof � C + G are+ \�� 3 functionmodelingsimpleintegrationoveranuniformstrip,Gaussianresolutionkernelof definedwidth, or an experimen-tally obtainedresolutionkernel.
E.2 Shift-variantdetectorresolutionmodel
The detectorresolutionfunction �N � C + G dependson the de-
tectorsurfacelocation,i.e. it typically dependson both ! and � .Themeasureddatacanbeapproximatedby��
N C�� � r G : î��� ð?ñ [�� S �N ��� CåC��Tò����ÑG � r G =
M N C���� � r GJI (7)
usingseparateresolutionkernelfunctionfor eachprojectionlinelocation C ! I���G . This operationhasto be performedin the pro-jectiondomain,sinceit doesnothaveanefficientcounterpartinthe spectrumdomain. Fortunately, the resolutionfunction canusuallybe approximatedby small localizedkernelsleadingtoonly a minor increaseof thecomputationdemands.
E.3 Image-spaceshift-variantresolutionmodel
In this model the blur (or shapeof the integration kernel)variesalso along the projectionlines as they traversethe im-agespace.Although Fourier-basedprojectorscannot directly
KB Power spectra - J=6, m=0, K/N=2
-160
-140
-120
-100
-80
-60
-40
-20
00 0.25 0.5 0.75 1
Frequency
dB
alpha_s, alpha/J=3.08alpha_+, alpha/J=2.50alpha_o, alpha/J=2.34alpha_-, alpha/J=2.00 1 - f_Nq
Fig. 4. Power spectraof Kaiser-Besselinterpolationkernelsof usingoptimum(alpha o) andsuboptimumparametersfor öt÷ ø , ùQ÷ ú and û ü]ý%÷,þ ,whoseprofilesareshown in Fig. 3.
take into accountthe spacevariant resolutionproperties,theireffect can be modelledin the imagedomain(ratherthan dur-ing the projectiongenerationprocess)similarly as it waspro-posedin [31] for the EM reconstruction. Here, the image-domainspatially-variantresolutionkernelwill model(approx-imately) thosespatially-varianteffectson resolutionwhich arenot modeledin theprojectionspace.Theresolutionkernelcanbe determinedby measurement,or MonteCarlo simulation,ofspatially-variantprojectiondatafor a setof point sourcesdis-tributed throughoutthe imageregion, followed by reconstruc-tion. In this modelingapproachtheforward-projectioncalcula-tion is precededby blurring of imagewith thespatially-variantresolutionkernel � ë?CFEHG :�BDC ì?� c G : îë � ð?ñ [ � ë � CbC ì ò ì � G � c G = B�C ì � � c GjI (8)
where � c is imagesamplingunit and ì#"�� � . For the back-projection,theblurringoperationis performedonthecorrectionimage( �������� in Fig. 2) after the back-projectionoperationandbeforetheupdateoperation.Again,for thesmalllocalizedreso-lution kernelsthisoperationrepresentsonly a minor increaseoftheoverall computationdemands.
F. Min-Max InterpolationOptimization
Thesinglemostimportantoperationwithin theFourier-basedapproachesinfluencingtheirquality in acrucialway is theinter-polationbetweenthespectrumrasters.We haveutilizedKaiser-Bessel(KB) interpolationkernel[29] whichwasoptimizedto beoptimal in themin-maxsenseusingthemethodologydescribedin [27]. TheKB window functionhastheformê�� �� CFhZG : !" � C�#<G $&% ! ò C�'Þh)(+*DG _�, � " � $ # % ! ò-C�'Þh-(.*DG _�,
(9)for @0/ h / *1(2' andvaluezero for h435*1(2' , where h isthedistancefrom theKB kernelcenter,
" � denotesthemodifiedBesselfunction [32] of order 6 , * is the sizeof the KB win-dow and # is aparametercontrollingtheKB window shapeandfrequency characteristics[29,30] (seeexamplesof KB windowfunctionsandof their spectrain Figs. 3 and4). The interpo-lation kernelcanbegivenasa radially symmetricKB window

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 6
function,or asaseparable(in spectrumcomponentsh ) Ilh _ Ivf`f�f )windo7 w function. In our studieswe have usedthe secondap-proach,in which theinterpolationkernelis givenbyê � 8� CFh ) Ibh _ G : ê � 8� CFh ) G =âê � 8� CFh _ GJf (10)
In [27], themin-maxmethodfor designingandoptimizationof thefinite supportinterpolatorsandof thecorrespondingscalefunctionswasdeveloped. The min-max analysisprovides theinterpolatorthat minimizes the worst-caseinterpolationerrorover all signalsof unit norm. Unfortunately, no analyticalfor-mulawasfound for specifyingthe optimal choicefor the scal-ing function. Consequently, the spaceof scalingfunctionshadto besearchednumerically. A varietyof classesof scalingfunc-tionswereconsideredin [27]. For theKB interpolationkernel,thescalingfunctioncorrespondingto its Fouriertransformpro-videdby far the lowestpossibleworst-caseerror, provided theparametersthatdeterminetheshapeof theKaiser-Besselfunc-tion werechosenappropriately. The parameters( # , 6 ) of theKaiser-Besselfunction werevariedby brute-forcesearch,andthe valuesthat minimizedthe worst-caseerror werefound nu-merically for eachinterpolationkernelsize * . Basedon there-sultsin [27] andon thenumericalandexperimentalresultspre-sentedin the following we believe that theseinterpolatorsarequitecloseto optimalfor theNUFFT problem.
I I I . NUMERICAL ERROR ANALYSIS RESULTS
Wehavecalculatedthemaximumerror 9 � 8;: for therangeofoversamplingfactors( � (J� : ! I ! f <KI='9I=> ), interpolationkernelsizes( * :@? I=<9I=AKI�B ), ordersof KB window ( 6 "DC òE'9I='�F ) andKB shape(width) parameter( # , where#(.* "GC ! I=>�F ). Theinter-polationerroris rapidlydecreasingwith theamountof oversam-pling. Weshow results(Figs.5,6,7) only for thecase� (J� : '(a reasonablecompromisebetweenthespeedandquality). Thebehavior for other oversamplingcasesis similar, as shown inAppendix. The optimumorderof the KB interpolatoris closeto zerofor all � (p� , contraryto our previousexperienceswiththe KB window usedasspatialimagebasisfunction [30]. At6 :�@ , theoptimalvaluesof #(.* ratio areapproximatelycon-stantoverarangeof KB kernelsizes,but theoptimal #H(+* is dif-ferentfor differentoversamplingfactors(about1.5for � (p� =1,about2.05for � (J� =1.5,about2.34for � (p� =2 andabout2.6for � (J� =3).
Figs.3 and4 show profilesandpower spectra,respectively,of optimal andsuboptimalinterpolationkernels. Note that thereciprocal(spectral)domainfor theNUFFT interpolatorsis thespatialimagedomain. Consequently, the frequency 1.0 repre-sentsrepetitionimageperiodgiven by the spectrumsamplingand1-f Nq representsperiodicrepeatof the(left) imagebound-ary for the caseof 100% oversampling( � (p� : ' ), beyondwhich the interpolationkernel spectrumshouldbe effectivelyzero. Optimuminterpolationkernel is a compromisebetweentherequirementsthat themain lobeof its transform(spectrum)decaysto negligible valuesat, or before,the imageperiodicre-peat1-f Nq (limiting # from thetop) andthat its sidelobesareeffectively zerobeyondthatpoint (requiringlarge # ). Any devi-ation from this compromiseleadsto a dramaticincreaseof theinterpolationerrors(seestarsymbolsin Fig. 5), in spiteof verysimilar kernelshapes(Fig. 3).
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−6
10−5
10−4
10−3
10−2
10−1
NUFFT Error for K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax
J =4 J =5 J =6 J =7
Fig. 5. Maximum error I�JLK�M of Kaiser-Besselinterpolatorasa function oftheshapeparameterÿ , for severalinterpolationkernelsizesö , Besselorderù;÷ ú andusing100%zero-paddingof the spatialdomain( û üåý�÷ þ )(NUFFTinterpolatorhasbeenfoundto performbestfor theKB orderscloseto ùn÷�ú - seeFig. 6). Notethat theoptimumratio ÿKüJö is about þ�N O�P forvaryingkernelsizes.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−6
10−5
10−4
10−3
10−2
NUFFT Error for K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax
J =4 αopt
=2.25J J =5 α
opt=2.3J
J =6 αopt
=2.3J J =7 α
opt=2.3J
Fig. 6. Maximum error I JLK�M of Kaiser-Besselinterpolatorasa function oftheorder ù , for severalsizesö , 100%zero-padding( û ü]ý ÷ þ ) andusingoptimum ratio ÿKüJö for eachparticularvalue of ù . The optimum orderparameterù is slightly above ú for all kernel sizes; ÿ+QSR�T in the legendrepresentglobaloptimumof the ÿ parameterfor thegivenkernelsize.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
Optimum Values α for K/N=2
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
Fig. 7. Valuesof the optimumratio ( ÿ+QSR�T4üJö ) asa function of the KB orderù , for 100%zero-padding( û üåý ÷�þ ). The valuesof optimumratio forindividual kernel sizesclusteraroundsimilar value for order ù~÷%ú anddiverge for other orders. Similar behavior have beenobserved for othervaluesof û ü]ý , but with differentvalueof theoptimumratioat ù ÷mú .

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 7
0.35 sec
Fourier Bilinear
0
222
rms=1.6% max=6.1%
|Bilinear−DSFT|
0.01
13.68
0.11 sec
Fourier NUFFT
0
224
rms=0.020% max=0.061%
|NUFFT−DSFT|
0.01
0.14
1.95 sec
Space Based Projector
0
224
rms=0.17% max=1.7%
|SBP−NUFFT|
0.1
3.92
Fig.8. Exampleof sinograms(144angularsamples)of Zubalphantomobtainedby Fourier-basedforward-projectorusingbilinearinterpolation( û üåý ÷mþ )(topleft), Fourier-basedforward-projectorusingNUFFTwith optimizedKBkernel( ûTü]ý ÷�þ , ù ÷ ú , öm÷�P , and ÿKüJö ÷6þ�N P ) (top middle) andaspace-basedforward-projector(SBP)(top right). (Illustrative timesarefornon-optimizedMatlabimplementations.)Bottomrow shows correspondingabsolutedifferencesinograms(includingmeasuresof root-mean-squaredif-ferenceandmaximumabsolutedifference)with respectto theexactFourierprojector(DSFT) (bottomleft andmiddle), andFourier NUFFT projector(bottomright).
TABLE I
MAXIMUM FORWARD-PROJECTION ERRORS FOR DIFFERENT
OVERSAMPLING AND KERNEL SIZES, USING ù-÷mú AND OPTIMUM ÿ .
Oversampling J=4 J=5 J=6 J=7
K/N=1 5.21% 2.27% 2.94% 1.17%
K/N=1.5 0.11% 0.021% 0.0039% 0.00033%
K/N=2 0.061% 0.0037% 0.00078% 0.000042%
K/N=3 0.033% 0.0011% 0.00019% 0.000007%
IV. COMPUTER SIMULATION RESULTS
A. Forward-Projector
In additionto the numericalevaluationof the NUFFT-basedforward projectorfor the worst caseerror, we have evaluatedthe accuracy of the NUFFT-basedforward projectorusing thedigital Zubalphantom.We croppedtheoriginal
! '2U7� ! '�U im-ageto thesize
! @Þ@ � ! @Þ@ sothat thephantomtorsofully occu-piesthewholeimageregion in its wider dimension(seebottomleft imagein Fig. 11), to avoid any extra zero-padding,otherthan that given by � (J� . We have simulateda parallel-beamtomographicsystem,with a sinogramsizeof 100radialbinsby192anglesover
! U @WV , includinga rectangulardetectorresponse� C + G : rectC + G with widthequalto thepixelsize,partiallyrepre-sentingthefinite detectorwidth in aPETsystem(ratherthanus-ing overly idealizedline integrals).We have computedforwardprojectionsfor this systemin four ways: usingFourier-basedprojectorwith exact(to within doubleprecisionin Matlab)eval-
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Forward−Projection Error for K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 9. Maximuminterpolationerror (% of projectionmaximum)of forward-projectionof modifiedZubalphantomusingNUFFTwith Kaiser-Besselin-terpolatorof several sizes ö asa functionof theparameterÿ . Samesetofparametersusedasfor theFig. 5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−4
10−3
10−2
10−1
Forw−Proj Error for K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.35J J =5 α
opt=2.35J
J =6 αopt
=2.35J J =7 α
opt=2.4J
Fig. 10. Maximuminterpolationerror(% of projectionmaximum)of forward-projectionof modified Zubal phantomusing NUFFT with Kaiser-Besselinterpolatorof several sizes ö asa function of the KB order ù . For eachindividual ù anoptimum ÿ wasused. ÿ QSR�T in thelegendrepresentglobaloptimumof the ÿ parameterfor thegivenkernelsize.
uationof the2D FT (DSFT),usingFourier-basedprojectorwiththe2D NUFFTapproximation(to theDSFT)utilizing min-maxoptimizedKaiser-Besselinterpolation,usingFourier-basedpro-jector with bilinear interpolation,and using space-basedpro-jector. Examplesof sinogramsobtainedby Fourier-basedandspace-basedprojectors,andcorrespondingabsolutedifferenceimagesareshown in Fig. 8.
Basedon the differencebetweenthe exact FT and NUFFTmethodwe have evaluatedMaximumError, RootMeanSquareError andMeanError. In the following graphs,we show onlymaximumerrordefinedasthemaximumabsolutedifferencebe-tweenexactFT andNUFFTmethodin percentof themaximumvalueof theexactFT method.Othererrorshave beenfoundtoexhibit similarbehavior, asshown in Appendix.Theerrorshavebeenevaluatedfor thesamesetof theNUFFT parametersasinthenumericalanalysis.Theerrorcurvesasa functionof the #(Fig. 9) show very similar behavior to thenumericalcase,withnearlyexactlythesameoptima.Theoptimaover 6 (Fig.10)arelessconsistentcomparedto thetheoreticalcase(Fig. 6) but the

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 8
231 sec
Exact DSFT
0
5
Zubal phantom
0
5
0.37 sec
Fourier NUFFT
0
5
rms=0.009% max=0.016%
|NUFFT−DSFT|
0
8.1x 10
−4
4.88 sec
Space Based B−Proj
0
5
rms=0.20% max=1.5%
|SBBP−NUFFT|
0
0.07
Fig. 11. Exampleof imagesobtainedby back-projectionof filteredsinogramsof Zubal phantom(bottom left) usingexact Fourier-basedback-projector(DSFT) (top left), Fourier-basedback-projectorusingNUFFT with opti-mizedKB kernel ( û ü]ý ÷%þ , ù ÷ ú , ö ÷DP , and ÿKüJöL÷ þ�N O�P ) (topmiddle)anda space-basedback-projector(SBBP)(top right). (Illustrativetimesarefor non-optimizedMatlabimplementations.)Bottom(middleandright) row showscorrespondingabsolutedifferenceimages(includingmea-suresof root-mean-squaredifferenceand maximumabsolutedifference)with respectto the exact Fourier back-projector(DSFT) (bottommiddle),andFourierNUFFT projector(bottomright).
TABLE II
MAXIMUM BACK-PROJECTION ERRORS FOR DIFFERENT OVERSAMPLING
AND KERNEL SIZES, USING ù-÷mú AND OPTIMUM ÿ .
Oversampling J=4 J=5 J=6 J=7
K/N=1 9.10% 1.32% 1.75% 0.71%
K/N=1.5 0.099% 0.020% 0.0042% 0.00068%
K/N=2 0.015% 0.0015% 0.00034% 0.000019%
K/N=3 0.0075% 0.00044% 0.000063% 0.000002%
locationsof thesmallestmaximumerror 9 � 8;: arestill clusteredaround6 : @ . Thecalculatedsinogramsfor theoptimumval-uesarevisually indistinguishable(from theexactFT approach)with errorssmallerthan0.06%when � (J� : ' even for thesmallestkernelsize( * :X? ). By comparison,conventionalbi-linear interpolationfor the polar to Cartesianconversiongivesabouttwo ordersof magnitudehighermaximumerror thanthissmallkernel.TableI showsmaximumforward-projectionerrorsfor optimumshapeparametersfor different levels of oversam-pling � (J� anddifferentkernelsizes* .
B. Back-Projector
We comparedthe adjoint operator(back-projector)of theNUFFT-basedforward projector using the Kaiser-Bessel in-terpolatorto the adjoint of the exact Fourier-basedreprojec-tor whenappliedto ramp-filteredideal sinogramsof the Zubalphantomof limited size(Fig. 11,bottomleft). Examplesof im-agesobtainedby Fourier-basedandspace-basedback-projectors
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 12. Maximum interpolationerror (% of phantommaximum)of discreteback-projectionusing NUFFT with Kaiser-Besselinterpolatorof severalsizes ö asa function of the parameterÿ . Samesetof parametersusedasfor theFigs.5, 9.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Back−Proj Error for K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.3J J =5 α
opt=2.35J
J =6 αopt
=2.35J J =7 α
opt=2.4J
Fig. 13. Maximum interpolationerror (% of phantommaximum)of discreteback-projectionusing NUFFT with Kaiser-Besselinterpolatorof severalsizes ö asa function of the KB order ù . For eachindividual ù an opti-mum ÿ wasused. ÿ+QSR�T in the legendrepresentglobal optimumof the ÿparameterfor thegivenkernelsize.
and correspondingabsolutedifferenceimagesare shown inFig. 11. Similar to the caseof the forward-projector, we haveevaluatedNUFFT-basedback-projectorerrorsfor arangeof pa-rameters.Themaximumerrors(shown in graphsin Figs.12,13)havebeencalculatedwithin thephantomtorsoregionastheper-centerror of the maximumvaluein the DSFT images.Again,the error curves are consistentwith the previous casesandthe NUFFT approachagreeswith the exact approachwithin0.015%,even for the smallestkernel size ( * :Y? ). Table IIshows maximumback-projectionerrorsfor optimumshapepa-rametersfor differentlevelsof oversampling� (p� andfor dif-ferentkernelsizes* .
C. Forward andBack-Projectorwithin IterativeReconstruction
Sinceiterativealgorithmsrequirerepeatedforwardandback-projections,it is conceivable that even small errorsin the re-projector could accumulate. To study practical performanceof the NUFFT forward andback-projectorwithin the iterativereconstructionprocess,the following experimentshave been

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 9
19882 sec
17 it
er o
f CG
Exact DSFT
0
5
Blob image basis
17 it
er o
f CG
Fourier NUFFT
0
5
15 sec17
iter
of C
G
Fourier NUFFT
0
5
rms=0.009% max=0.050%
|NUFFT−DSFT|
0
5.02x 10
−3
176 sec
17 it
er o
f CG
Space Based Rec
0
5
rms=0.31% max=1.5%
|SBR−NUFFT|
0
0.13
Fig.14. Exampleof QPWLS-CGreconstructions(17iterations)of thoraxphan-tomusingexactDSFT(top left), Fourier-basedNUFFTwith optimizedKBkernel ( û ü]ý ÷ þ , ù ÷ ú , ö6÷ZP , and ÿKüJö ÷ þ�N [�[ ) (top middle)andspace-based(SBR) (top right) forward andback-projectors.(Illustra-tive timesarefor non-optimizedMatlab implementations.)Bottom left isillustrationof NUFFTiterative reconstructionincludingmodelingof ablobbasisfunction and bell-shapeddetectorresolutionkernel. Bottom (mid-dleandright) row showscorrespondingabsolutedifferenceimages(includ-ing measuresof root-mean-squaredifferenceandmaximumabsolutediffer-ence)with respectto theexactFourierprojectors(DSFT)(bottommiddle),andFourierNUFFT projectors(bottomright).
TABLE III
MAXIMUM RECONSTRUCTION ERRORS FOR DIFFERENT OVERSAMPLING
AND KERNEL SIZES, USING ù-÷mú , OPTIMUM ÿ , AND USING IMAGE
MODEL INVOLVING PIXEL BASIS FUNCTIONS.
Oversampling J=4 J=5 J=6 J=7
K/N=1 0.59% 0.23% 0.056% 0.031%
K/N=1.5 0.098% 0.0081% 0.0011% 0.00055%
K/N=2 0.057% 0.0032% 0.00023% 0.000034%
K/N=3 0.039% 0.0020% 0.00010% 0.000010%
performed. We have simulatednoisy PET sinogrammeasure-ments (including attenuation,randomsand scatter)from the! '�U7� ! '�U Zubalphantom.We have simulateda parallel-beamtomographicsystemwith a sinogramsizeof 160radialbinsby192anglesover
! U @WV . We have run 17 iterationsof the conju-gategradientalgorithm for a data-weightedleast-squarescostfunction [33] with a standardquadraticfirst-order roughnesspenalty. The presentedresultswere obtainedusing a modelof rectangulardetectorresponsewith a pixel basis function,consistentwith the precedingsubsections. For the Fourier-basedapproaches,we haverepeatedreconstructionstudieswitha datamodel involving spatially-invariantbell-shapeddetectorresponseof equivalentwidth to the imagegrid sizeandmodel-ing imagerepresentationby smooth(blob) basisfunctions.Ex-amplesof reconstructedimagesusingFourier-basedandspace-basedforwardandback-projectorsandcorrespondingabsolutedifferenceimagesareshown in Fig. 14. The reconstructedim-agesusingDSFT, NUFFTandspace-basedprojectorswith pixel
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 15. Maximum interpolationerror (% of phantommaximum)of 17 itera-tionsof QPWLSreconstructionusingNUFFT forwardandback-projectorswith Kaiser-Besselinterpolatorof several sizes ö asa function of the pa-rameterÿ , andusingimagemodel involving pixel basisfunctions. Samesetof interpolationparametersusedasfor theFigs.5, 9, 12.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.5J J =5 α
opt=2.55J
J =6 αopt
=2.5J J =7 α
opt=2.4J
Fig. 16. Maximum interpolationerror (% of phantommaximum)of 17 itera-tionsof QPWLSreconstructionusingNUFFT forwardandback-projectorswith Kaiser-Besselinterpolatorof several sizes ö asa function of the KBorder ù , andusingimagemodelinvolving pixel basisfunctions..For eachindividual ù anoptimum ÿ wasused. ÿ QSR�T in thelegendrepresentglobaloptimumof the ÿ parameterfor thegivenkernelsize.
basisfunctions(top row) arevisually indistinguishable.Recon-structionswith an imagemodel involving smoothbasisfunc-tions(illustratedat thebottomleft) providedecreasednoiselev-els,asexpected.
The errors of NUFFT-basedforward and back-projectorswithin the iterative reconstruction,as comparedto the recon-structionusingexactFT projectors(DSFT),havebeenevaluatedfor thesamesetof parametersasin thepreviouscases.Themax-imumerrorhasbeencalculatedwithin thephantomtorsoregionandexpressedasthepercenterrorrelativeto themaximumvaluein thephantom.Theerrorcurves(Figs.15,16)show againsim-ilar behavior, with theoptimumslightly shiftedtowardshigherparameter# values. This is probablycausedby the fact thatthephantomdoesnot cover thewholeimageregion(essentiallyconstitutingadditionalzero-padding).The maximumerror isbelow 0.06% even for the smallestkernel size ( * :\? ) and� (p� : ! f]< . TableIII shows the maximumreconstructioner-

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 10
TABLE IV
MAX^
IMUM RECONSTRUCTION ERRORS FOR DIFFERENT OVERSAMPLING
AND KERNEL SIZES, USING ù-÷mú , OPTIMUM ÿ , AND USING IMAGE
MODEL INVOLVING BLOB BASIS FUNCTIONS.
Oversampling J=4 J=5 J=6 J=7
K/N=1 0.54% 0.24% 0.043% 0.025%
K/N=1.5 0.057% 0.0081% 0.0012% 0.00034%
K/N=2 0.033% 0.0031% 0.00024% 0.000035%
K/N=3 0.020% 0.0019% 0.00013% 0.000025%
rors for optimumshapeparametersfor differentlevelsof over-sampling � (p� andfor differentkernelsizes * . Fourier-basedreconstructionswith an image model involving smoothbasisfunctionsshowed similar comparisonswith slightly decreasederrors,asshown in Appendix.
V. ITERATIVE RECONSTRUCTION USING REAL DATA
The performanceof the Fourier-basedforward and back-projectorswithin iterativereconstructionhasbeenfurthertested(and comparedto the space-basedprojectors)using real PETdata.For this study, we have usedtransmissiondataof a phys-ical torsophantomacquiredon theclinical scannerECAT-921.The datacontained160 radial bins by 192 anglesover
! U @WV ,with projectionray size3.38mmandreconstructedimagepixelsize4.22mm.Theattenuationimagehasbeenreconstructedus-ing 200iterationsof thetransmissionpenalized-likelihoodalgo-rithm T-PL-OSPS[34] (with numberof subsetsequalto one)initialized by the filtered-backprojectionimage(shown at topleft in Fig. 19). Althoughthenumberof iterationsusedin prac-ticewouldbemuchlower, wehaverunthealgorithmsfor 200it-erationsto testif thereis any accumulationof errorsorany insta-bility in the Fourier-basedapproach,asthe iterationsprogress.The Fourier-basedapproachshowedstablebehavior consistentwith the space-basedapproach.The observed measuresof thedifferencebetweenthetwo approachesdid not changeby morethan1% (of their respective maximumvaluesat iteration200,reportedin Fig. 19)duringthelast110-120iterations.
Examplesof reconstructedimagesusing Fourier-basedandspace-basedforward and back-projectorsanda correspondingabsolutedifferenceimage are shown in Fig. 19. Horizontalprofilesthroughthecenterpartof thereconstructedimagesareshown in Fig. 20. ThereconstructedimagesusingNUFFT andspace-basedprojectorswith pixel basisfunctions(Fig. 19 topmiddleandright, Fig. 20 solid line profiles)arevisually indis-tinguishable. Reconstructionswith an imagemodel involvingsmoothbasisfunctions(illustratedin Fig. 19 at thebottomleft)provide decreasednoiselevelswhile preservingthe edges(seedashedline profile in Fig. 20).
VI . DISCUSSION
The resultsreportedwithin this paperwereobtainedfor the2D case.Theillustrative computationtimesreportedin thefig-uresarefor nonoptimizedMatlabcodes.TheFourier-basedfor-wardandback-projectorswerefoundto bemorethan10-times
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 17. Maximum interpolationerror (% of phantommaximum)of 17 itera-tionsof QPWLSreconstructionusingNUFFT forwardandback-projectorswith Kaiser-Besselinterpolatorof several sizes ö asa function of the pa-rameterÿ , andusingimagemodelinvolving blobbasisfunctions.Samesetof interpolationparametersusedasfor theFigs.5, 9, 12.
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.55J J =5 α
opt=2.55J
J =6 αopt
=2.5J J =7 α
opt=2.45J
Fig. 18. Maximum interpolationerror (% of phantommaximum)of 17 itera-tionsof QPWLSreconstructionusingNUFFT forwardandback-projectorswith Kaiser-Besselinterpolatorof several sizes ö asa function of the KBorder ù , andusingimagemodelinvolving blob basisfunctions.For eachindividual ù anoptimum ÿ wasused. ÿ QSR�T in thelegendrepresentglobaloptimumof the ÿ parameterfor thegivenkernelsize.
fastercomparedto their space-basedcounterparts(seeFigs. 8and11). Similar speed-upis expectedfor optimizedversionsofbothapproaches.TheFourier-basedapproachescanbestraight-forwardly extendedto the3D caseaswasdonefor the3D ver-sion of Direct Fourier Method(3D-FRP[24]), which involvedboth back-projectionandforward-projection(reprojection)op-erations.Extrapolatingfrom experiencewith the3D-FRP[24],thefully 3D iterativeapproachesusingFourier-basedprojectorswill havethepotentialto speed-upthereconstructiontimeabout5-10timesfor imagesof size
! '2UÞ� , andthisspeed-upwill bein-creasingwith theimagesize.An additionalsubstantialspeed-upof Fourier-basedapproachesis feasibleusing relatively cheapoff-the-shelfFFT processorboards. The speed-upof the re-constructionapproachesis very important,assupportedby theobservations[6] that thedatavolumesin modernPET systemsmightbeincreasingatafasterratethantheincreaseof computerpowerasdescribedby Moore’s law.

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 11
Initi
al Im
age
FBP
206 sec20
0 ite
r of
T−
PL−
OS
PS
Fourier NUFFT
1659 sec
200
iter
of T
−P
L−O
SP
S
Space Based Rec
Blob image basis
200
iter
of T
−P
L−O
SP
S
Fourier NUFFT
rms=0.15% max=1.29%
|NUFFT−SBR|
Fig. 19. FBP (servingasinitial image)(top left) andT-PL-OSPSreconstruc-tions (200 iterations)from transmissiondata(from ECAT-921scanner)ofphysicalthoraxphantomusingFourier-basedNUFFT with (theoretically)optimizedKB kernel( û üåý%÷�þ , ùn÷�ú , öt÷_P , and ÿKüJöt÷Lþ�N O�P ) (topmiddle) and space-based(SBR) (top right) forward and back-projectors.(Illustrative timesarefor non-optimizedMatlabimplementations.)Bottomleft is illustrationof NUFFT iterative reconstructionincludingmodelingofa blob basisfunction andbell-shapeddetectorresolutionkernel. Bottomright is absolutedifferenceimage(includingmeasuresof root-mean-squaredifferenceandmaximumabsolutedifference)betweenreconstructionsus-ing Fourier-basedNUFFT andspace-basedprojectors.
20 40 60 80 100 1200
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Horizontal profiles (65−th row)
Space−Based ReconstructionFourier NUFFT (pixel basis)Fourier NUFFT (blob basis)
Fig. 20. Horizontal profiles through the iterative reconstructionsshown inFig. 19. Space-basedandFourier-basedreconstructionsusingpixel basisfunctions(solid lines) arecloselyoverlapping. Fourier-basedreconstruc-tion modelingblob basisfunction(dashedline) provideslower noiselevels(while preservingedges),in agreementwith our previousexperienceswith(space-based)iterative reconstructionsusingblob basisfunctions[30].
It is worth to mentionthat thetwo Fourier-basedreconstruc-tion approachesmentionedabove (3D-FRPanditerative), bothuse back-projectionand forward/reprojectionoperationsandthusboth benefitconsiderablyfrom the Fourier-basedforwardandback-projectors,but the two approachesarequite distinc-tivein nature.3D-FRPis basedonthediscretizedinverseRadonformuladerivedfor theidealcontinuousmodelandtheimageisobtainedin onepassthroughthedatawhich areweightedin thefrequency domainfor thesamplingdensityof thedataspectrumandfor nonuniformitiesintroducedby theinterpolation.On theother hand, the Fourier basediterative approaches,which arethe focusof this paper, arederived basedon a discreteimage
anddataacquisitionmodelwhile takinginto accountdatastatis-tics. Here,theimageis graduallybuilt-up and/orrefined(basedon particulardiscrepancy andupdateoperations)throughan it-erativeprocess,andtheimageupdatestepis basedonthesimpleback-projection(without datafiltering) which is an adjointop-erationto theforwardprojection.
Direct application of the NUFFT approachis limited touniformly-spacedparallelprojectiondata. However, it canbeeasily extendedto fan and conebeamdata in the casewhenthosedatacanbe resortedinto setsof parallellineswhich willhave, however, non-equidistantspacing. In this case,by usingthe duality principle, the non-uniformrasteris definedby thedistribution of the parallel projection lines for eachdirection`
and the NUFFT output is the uniform spectralrasterof theprojectiondataon
`Wa. This operation(or its adjoint) replaces
the operationof (I)FFT of projectionswithin the NUFFT back(forward)-projectorsdescribedin SectionII-B.
A noteworthypropertyof theFourierbasedapproachesis thatthey canbestraightforwardlyappliedto thecaseof dataand/orimagedefinedon theefficient spatialgrids(hexagonin 2D caseandbody-centeredcubicgrid in 3D case[35]) thanksto theex-istenceof efficientFFT algorithmsfor thosegrids.
Finally, it is importantto emphasizethat we have beenuti-lizing Kaiser-Besselwindow functionin two quitedistinctwayswithin theframework of theFourier-basediterativeapproaches.First, theKB window hasbeenutilized asthelocalizedinterpo-lation kernelin thespectrum-domaininterpolation- thecrucialNUFFT operation.Second,it hasbeenusedin theoptionalop-erationof modelingof thespatial-domainimagebasisfunction.Theseareindependentoperationshaving quitedifferentrequire-mentson theKB window shape,asillustratedin SectionIII.
VI I . CONCLUSIONS
Ourresultsshow verygoodagreementof thetheoreticalmin-max error analysisof the NUFFT forwardandback-projectorswith their practicalperformance.Consequently, the min-maxapproachoffers a valid and practical framework for the opti-mizationof theNUFFT interpolationparameters.
Our resultsfurthershow that the NUFFT-basedforwardandback-projectorswith the min-maxoptimizedKaiser-Besselin-terpolationare fast and very accurate. In particular, their ap-proximationerrorshavebeenfoundto beextremelylow ascom-paredto theexactdiscreteFouriertransformapproach,andtheyhave manifesteda very goodmatchto the space-basedprojec-tors,evenfor smalloversamplingandinterpolationkernelsizes.For example,it hasbeenobservedthatfor theoptimizedKaiser-Besselinterpolatorsit might be sufficient to usejust 50% FFToversamplingandtheinterpolationkernelsof diameterspanningjust 4 to 5 grid points.
In summary, it hasbeendemonstratedthat theFourier-basedforwardandback-projectorsutilizing theNUFFTapproachpro-vide fastandextremelyaccuratetoolsfor iterative tomographicreconstruction.The Fourier-basedprojectorsareespeciallyat-tractive for the fully 3D iterative reconstructionapproachesinPET characterizedby very large datavolumes. An additionaladvantageof the Fourier-basedapproachesis the possibilityofutilizing the powerful and cheapoff-the-shelfFFT processinghardware.

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 12
ACKNOWLEDGMENTS
The authorsgratefully acknowledge Robert M. Lewitt forfruitful discussionsandcommentson this work. This work wassupportedby NIH grantsCA92060/ EB002131,CA-60711andby TheWhitakerFoundation.
REFERENCES
[1] R. M. LeahyandJ. Qi, “Statisticalapproachesin quantitative positronemissiontomography,” StatisticsandComputing, vol. 10,no.2, pp.147–165,2000.
[2] J. A. Fessler, Statisticalimage reconstruction, Lecturenotesfor IEEENSS/MIC shortcourse,availableat http://www.eecs.umich.edu/˜fessler/,2001.
[3] R.M. Lewitt andS.Matej, “Overview of methodsfor imagereconstructionfrom projectionsin emissioncomputedtomography,” Proc.IEEE, vol. 91,no.10,2003,To appear.
[4] S. BasuandY. Bresler, “O(N-2 log(2) N) filtered backprojectionrecon-structionalgorithmfor tomography,” IEEE Trans.Image Processing, vol.9, no.10,pp.1760–1773,2000.
[5] J. J. Hamill, C. J. Michel, andP. E. Kinahan, “FastPETEM reconstruc-tion from linograms,” in Proceedingsof the2002IEEE NuclearScienceSymposiumand Medical Imaging Conference. CDROM, M11-65, S. D.Metzler, Ed.Norfolk, VA, 2002.
[6] D. Brasse,P. E.Kinahan,R.Clackdoyle, C.Comtat,M. Defrise,andD. W.Townsend, “Fast fully 3D imagereconstructionusingplanograms,” inProceedingsof the 2000IEEE NuclearScienceSymposiumandMedicalImagingConference. CDROM., M. Ulma,J.Valentine,andE. J.Hoffman,Eds.Lyon,France,2000,pp.15.239–15.243.
[7] B. De Man andS. Basu, “Distance-driven projectionandbackprojectionfor computedtomography,” in Proceedingsof the 2002 IEEE NuclearScienceSymposiumandMedicalImaging Conference. CDROM, M10-89,S.D. Metzler, Ed.Norfolk, VA, 2002.
[8] H. Zhao and A. J. Reader, “Fast projectionalgorithm for voxel arrayswith object dependentboundaries,” in Proceedingsof the 2002 IEEENuclearScienceSymposiumandMedical Imaging Conference. CDROM,M10-104, S.D. Metzler, Ed.Norfolk, VA, 2002.
[9] A. Averbuch, R. R Coifman, D. L. Donoho,M. Israeli, and J. Walden,“Fastslantstack:A notionof Radontransformfor datain aCartesiangridwhich is rapidly computable,algebraicallyexact, geometricallyfaithfulandinvertible,” SIAMScientificComputing, 2003,to appear.
[10] R. M. Lewitt, “Reconstructionalgorithms: Transformmethods,” Proc.IEEE, vol. 71,no.3, pp.390–408,1983.
[11] A. C. Kak andM. Slaney, Principlesof ComputerizedTomographicImag-ing, IEEE Press,New York, 1987.
[12] N. Niki, R. T. Mizutani,Y. Takahashi,andT. Inouye,“A high-speedcom-puterizedtomographyimagereconstructionusingdirect two-dimensionalFourier transformmethod,” Syst.Comput.Controls, vol. 14, no. 3, pp.56–65,1983.
[13] S. Matej andI. Bajla, “A high-speedreconstructionfrom projectionsus-ing direct Fourier methodwith optimizedparameters- an experimentalanalysis,” IEEE Trans.Med.Imaging, vol. 9, no.4, pp.421–429,1990.
[14] M. Magnusson,P. E. Danielsson,andP. Edholm, “Artefactsandreme-dies in direct Fourier reconstruction,” in Proceedingsof the 1992IEEENuclearScienceSymposiumandMedical Imaging Conference, vol.2. Or-lando,Florida,1992,pp.1138–1140.
[15] H. Schomberg andJ. Timmer, “The gridding methodfor imagerecon-structionby Fouriertransformation,” IEEE Trans.Med.Imaging, vol. 14,no.3, pp.596–607,1995.
[16] C. W. Stearns,D. A. Chesler, andG. L. Brownell, “Three dimensionalimagereconstructionin theFourierdomain,” IEEE Trans.Nucl.Sci., vol.34,no.1, pp.374–378,1990.
[17] S. Dunne,S. Napel,andB. Rutt, “Fastreprojectionof volumedata,” inProceedingsof theFirst Conferenceon Visualizationin BiomedicalCom-puting. Atlanta,GA, 1990,pp.11–18.
[18] J. D. O’Sullivan, “A fast sinc function gridding algorithm for Fourierinversionin computertomography,” IEEE Trans.Med. Imaging, vol. 4,no.4, pp.200–207,1985.
[19] H. SedaratandD. G. Nishimura, “On the optimality of the gridding re-constructionalgorithm,” IEEE Trans.Med. Imaging, vol. 19, no. 4, pp.306–317,2000.
[20] J.I. Jackson,C. H. Meyer, D. G. Nishimura,andA. Macovski, “Selectionof a convolution function for Fourier inversionusing gridding,” IEEETrans.Med.Imaging, vol. 10,no.3, pp.473–478,1991.
[21] C. H. Meyer, B. S. Hu, D. G. Nishimura,andA. Macovski, “Fastspiralcoronaryarteryimaging,” Magn.Reson.Med., vol. 28,pp.202–213,1992.
[22] D. C. Noll, “Multishot rosettetrajectoriesfor spectrallyselective MRimaging,” IEEETrans.Med.Imaging, vol. 16,no.4, pp.372–377,1997.
[23] J.G. PipeandP. Menon,“Samplingdensitycompensationin MRI: Ratio-naleandaniterative numericalsolution,” Magn.Reson.Med., vol. 41,no.1, pp.179–186,1999.
[24] S. Matej andR. M. Lewitt, “3D-FRP:Direct FourierreconstructionwithFourierreprojectionfor fully 3D PET,” IEEE Trans.Nucl. Sci., vol. 48,no.4, pp.1378–1385,2001.
[25] S.Matej,M. E. Daube-Witherspoon,andJ.S.Karp, “Performanceof 3DRAMLA with smoothbasisfunctionson fully 3D PETdata,” in Proceed-ingsof TheSixthInternationalMeetingon Fully Three-DimensionalIm-age Reconstructionin Radiology andNuclearMedicine, R. H. Huesman,Ed.PacificGrove,CA, 2001,pp.193–196.
[26] J. A. FesslerandB. P. Sutton, “A min-maxapproachto themultidimen-sional nonuniformFFT: Application to tomographicimage reconstruc-tion,” in Proc.Intl. Conf. on Image Processing, 2001,vol. 1, pp.706–709.
[27] J.A. FesslerandB. P. Sutton,“Nonuniform fastFouriertransformsusingmin-maxinterpolation,” IEEETrans.SignalProcessing, vol. 51,no.2,pp.560–574,2003.
[28] P. E. KinahanandJ.G. Rogers,“Analytic 3D imagereconstructionusingall detectedevents,” IEEETrans.Nucl.Sci., vol. 36,pp.964–968,1989.
[29] R. M. Lewitt, “Multidimensionaldigital imagerepresentationsusinggen-eralizedKaiser-Besselwindow functions,” J. Opt. Soc.Am.A, vol. 7, no.10,pp.1834–1846,1990.
[30] S. Matej andR. M. Lewitt, “Practical considerationsfor 3D imagere-constructionusingspherically-symmetricvolumeelements,” IEEE Trans.Med.Imaging, vol. 15,no.1, pp.68–78,1996.
[31] A. J.Reader, P. J.Julyan,H. Williams, D. L. Hastings,andJ.Zweit, “EMalgorithmresolutionmodelingby image-spaceconvolutionfor PETrecon-struction,” in Proceedingsof the2002IEEE NuclearScienceSymposiumand Medical Imaging Conference. CDROM, M7-83, S. D. Metzler, Ed.Norfolk, VA, November10-16,2002.
[32] G. N. Watson, Theoryof BesselFunctions, CambridgeU. Press,Cam-bridge,England,1944.
[33] J.A. Fessler, “Penalizedweightedleast-squaresimagereconstructionforpositronemissiontomography,” IEEE Trans.Med.Imaging, vol. 13, no.2, pp.290–300,1994.
[34] H. ErdoganandJ.A. Fessler, “Orderedsubsetalgorithmsfor transmissiontomography,” Phys.Med.Biol., vol. 44,pp.2835–2851,1999.
[35] S. Matej andR. M. Lewitt, “Efficient 3D grids for imagereconstructionusingspherically-symmetricvolumeelements,” IEEE Trans.Nucl. Sci.,vol. 42,no.4, pp.1361–1370,1995.

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 13
APPENDIX
A1. TheoreticalErrors(Fig. 21 - Fig. 24)Fig. 21 TheoreticalErrorsfor bdcfe and gih�jkc 1, 1.5,2 and3Fig. 22 TheoreticalErrorsfor differentvaluesof lh.m againstKB order b , for gnh;joc 1, 1.5,2 and3Fig. 23 TheoreticalErrorsfor optimalvaluesof lh.m againstKaiser–Besselorder b , for K/N=1, 1.5,2 and3Fig. 24 Optimalvaluesof lHh+m againstb in termsof theoreticalerrorfor gnh;jkc 1, 1.5,2 and3
A2. ZubalPhantomForward-ProjectionErrors(Fig. 25 - Fig. 32)Fig. 25 Zubalphantomforwardprojectionmaximalerrorsfor bdcDe and gih�jpc 1, 1.5,2 and3Fig. 26 Zubalphantomforwardprojectionnormalizedmean-rootsquares(NRMS)errorsfor bdcDe and gih�jpc 1, 1.5,2 and3Fig. 27 Zubalphantomforwardprojectionmaximalerrorsfor different lHh+m and gnh;joc 1, 1.5,2 and3Fig. 28 ZubalphantomforwardprojectionNRMS errorsfor different lHh+m and gnh;jkc 1, 1.5,2 and3Fig. 29 ZubalphantomforwardprojectionmaxErrorsfor optimal lh.m againstb ( gih�jpc 1, 1.5,2 and3)Fig. 30 ZubalphantomforwardprojectionNRMS errorsfor optimal lHh+m againstb ( gih�jkc 1, 1.5,2 and3)Fig. 31 Zubalphantomforwardprojectionoptimal l -s in termsof maxerror gih�jpc 1, 1.5,2 and3Fig. 32 Zubalphantomforwardprojectionoptimal l -s in termsof NRMS error, gih�jpc 1, 1.5,2 and3
A3. ZubalPhantomBack-ProjectionErrors(Fig. 33 - Fig. 40)Fig. 33 Zubalphantombackprojectionmaxerrorsfor bocDe and gnh�jpc 1, 1.5,2 and3Fig. 34 ZubalphantombackprojectionNRMS errors gih�jkc 1, 1.5,2 and3Fig. 35 Zubalphantombackprojectionmaxerrorsfor differentvaleslh.m and gih�jpc 1, 1.5,2 and3Fig. 36 ZubalphantombackprojectionNRMS errorsfor differentvalueslh.m and gnh;j =1,1.5,2 and3Fig. 37 ZubalphantombackprojectionMax errorsfor optimal lh.m againstb , gnh;jpc 1, 1.5,2 and3Fig. 38 ZubalphantombackprojectionNRMS errorsfor optimal lHh+m againstb , gnh�jpc 1, 1.5,2 and3Fig. 39 ZubalphantombackprojectionMax errors- optimumvaluesl againstb , gnh�jkc 1, 1.5,2 and3Fig. 40 ZubalphantombackprojectionNRMS errors- optimumvaluesl againstb , gih�jkc 1, 1.5,2 and3
A4. Voxel andBlob-BasedReconstructionMax Errors(Fig. 41 - Fig. 48)Fig. 41 Zubalphantomvoxel-basedreconstructionmaxerrorsfor boc0e and gnh�jpc 1, 1.5,2 and3Fig. 42 Zubalphantomblob-basedreconstructionmaxerrorsfor bdc0e and gnh;jkc 1, 1.5,2 and3Fig. 43 Zubalphantomvoxel-basedreconstructionmaxerrorsfor different lh.m and gih�jkc 1, 1.5,2 and3Fig. 44 Zubalphantomblob-basedreconstructionmaxerrorsfor different lh.m and gnh�jkc 1, 1.5,2 and3Fig. 45 Zubalphantomvoxel-basedreconstructionmaxerrorsagainstb and gnh;jkc 1, 1.5,2 and3Fig. 46 Zubalphantomblob-basedreconstructionmaxerrorsagainstb and gnh;jpc 1, 1.5,2 and3Fig. 47 Zubalphantomvoxel-basedreconstructionmaxerrors- optimalvalueslHh+m againstb , gnh�jpc 1, 1.5,2 and3Fig. 48 Zubalphantomblob-basedreconstructionmaxerrors- optimalvalueslHh+m againstb , gnh;joc 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 14
A1. THEORETICAL ERRORS (FIG. 21 - FIG. 24)
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−1
100
Kaiser−Bessel Error for K/N=1 and m=0
α/J (Kaiser−Bessel width)
Err
or f
t
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=1.5 and m=0
α/J (Kaiser−Bessel width)
Err
or f
t
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−6
10−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=2 and m=0
α/J (Kaiser−Bessel width)
Err
or f
t
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−7
10−6
10−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=3 and m=0
α/J (Kaiser−Bessel width)
Err
or f
t
J =4 J =5 J =6 J =7
Fig. 21. TheoreticalErrorsfor qsrit and uwv&xyr 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−1
100
101
102
Kaiser−Bessel Error for K/N=1 and α/J =1.5
m (Kaiser−Bessel order)
Err
or ft
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=1.5 and α/J =2.05
m (Kaiser−Bessel order)
Err
or ft
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−6
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=2 and α/J =2.3
m (Kaiser−Bessel order)
Err
or ft
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−7
10−6
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=3 and α/J =2.6
m (Kaiser−Bessel order)
Err
or ft
J =4 J =5 J =6 J =7
Fig. 22. TheoreticalErrorsfor differentvaluesof z{v�| againstKB order q , for uwv&x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 15
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−1
Kaiser−Bessel Error for K/N=1 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or f
t
J =4 α/J=1 J =5 α/J=1.45 J =6 α/J=1.35 J =7 α/J=1.5
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=1.5 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or f
t
J =4 α/J=1.95 J =5 α/J=2 J =6 α/J=2.05 J =7 α/J=2.05
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−6
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=2 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or f
t
J =4 α/J=2.25 J =5 α/J=2.3 J =6 α/J=2.3 J =7 α/J=2.3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−7
10−6
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=3 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or f
t
J =4 α/J=2.5 J =5 α/J=2.6 J =6 α/J=2.55 J =7 α/J=2.6
Fig. 23. TheoreticalErrorsfor optimalvaluesof z{v�| againstKaiser–Besselorder q , for K/N=1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21
1.2
1.4
1.6
1.8
2
2.2Optimal α −s in terms of Kaiser−Bessel Error for K/N=1
m (Kaiser−Bessel order)
α opt/J
fo
r ft
err
or
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6Optimal α −s in terms of Kaiser−Bessel Error for K/N=1.5
m (Kaiser−Bessel order)
α opt/J
fo
r ft
err
or
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.9
2
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
Optimal α −s in terms of Kaiser−Bessel Error for K/N=2
m (Kaiser−Bessel order)
α opt/J
fo
r ft
err
or
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3Optimal α −s in terms of Kaiser−Bessel Error for K/N=3
m (Kaiser−Bessel order)
α opt/J
fo
r ft
err
or
J =4 J =5 J =6 J =7
Fig. 24. Optimalvaluesof z{v�| againstq in termsof theoreticalerrorfor uwv&x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 16
A2. ZUBAL PHANTOM FORWARD-PROJECTION ERRORS (FIG. 25 - FIG. 32)
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
0
101
102
Kaiser−Bessel Error for K/N=1 and m=0
α/J (Kaiser−Bessel width)
Err
or m
x
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−4
10−3
10−2
10−1
100
101
Kaiser−Bessel Error for K/N=1.5 and m=0
α/J (Kaiser−Bessel width)
Err
or m
x
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Forward−Projection Error for K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−6
10−5
10−4
10−3
10−2
10−1
100
101
Kaiser−Bessel Error for K/N=3 and m=0
α/J (Kaiser−Bessel width)
Err
or m
x
J =4 J =5 J =6 J =7
Fig. 25. Zubalphantomforwardprojectionmaximalerrorsfor qyrnt and uwv~x�r 1, 1.5,2 and3
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−1
100
101
102
Kaiser−Bessel Error for K/N=1 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
101
Kaiser−Bessel Error for K/N=1.5 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−5
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=2 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−6
10−5
10−4
10−3
10−2
10−1
100
101
Kaiser−Bessel Error for K/N=3 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
Fig. 26. Zubalphantomforwardprojectionnormalizedmean-rootsquares(NRMS)errorsfor qyrnt and uwv&x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 17
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
100
101
102
Kaiser−Bessel Error for K/N=1 and α/J =1.6
m (Kaiser−Bessel order)
Err
or m
x
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−3
10−2
10−1
100
101
Kaiser−Bessel Error for K/N=1.5 and α/J =2.35
m (Kaiser−Bessel order)
Err
or m
x
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=2 and α/J =2.35
m (Kaiser−Bessel order)
Err
or m
x
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=3 and α/J =2.65
m (Kaiser−Bessel order)
Err
or m
x
J =4 J =5 J =6 J =7
Fig. 27. Zubalphantomforwardprojectionmaximalerrorsfor different z{v�| and uwv&xyr 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−1
100
101
Kaiser−Bessel Error for K/N=1 and α/J =1.6
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=1.5 and α/J =2.1
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−5
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=2 and α/J =2.35
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=3 and α/J =2.65
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
Fig. 28. ZubalphantomforwardprojectionNRMS errorsfor different z{v�| and uEv&x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 18
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
100
Kaiser−Bessel Error for K/N=1 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or m
x
J =4 α/J=1.35 J =5 α/J=1.65 J =6 α/J=1.5 J =7 α/J=1.6
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=1.5 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or m
x
J =4 α/J=2.05 J =5 α/J=2.1 J =6 α/J=2.1 J =7 α/J=2.1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−4
10−3
10−2
10−1
Forw−Proj Error for K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.35J J =5 α
opt=2.35J
J =6 αopt
=2.35J J =7 α
opt=2.4J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=3 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or m
x
J =4 α/J=2.6 J =5 α/J=2.6 J =6 α/J=2.6 J =7 α/J=2.65
Fig. 29. ZubalphantomforwardprojectionmaxErrorsfor optimal z{v�| againstq ( uwv&x�r 1, 1.5,2 and3)
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−1
100
Kaiser−Bessel Error for K/N=1 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=1.5 J =5 α/J=1.6 J =6 α/J=1.55 J =7 α/J=1.6
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=1.5 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=2.15 J =5 α/J=2.15 J =6 α/J=2.1 J =7 α/J=2.1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=2 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=2.35 J =5 α/J=2.4 J =6 α/J=2.35 J =7 α/J=2.4
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=3 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=2.6 J =5 α/J=2.65 J =6 α/J=2.65 J =7 α/J=2.65
Fig. 30. ZubalphantomforwardprojectionNRMS errorsfor optimal z{v�| againstq ( uwv~x�r 1, 1.5,2 and3)

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 19
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2Optimal α −s in terms of Kaiser−Bessel Error for K/N=1
m (Kaiser−Bessel order)
α opt/J
fo
r m
x er
ror
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6Optimal α −s in terms of Kaiser−Bessel Error for K/N=1.5
m (Kaiser−Bessel order)
α opt/J
fo
r m
x er
ror
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3Optimal α −s in terms of Kaiser−Bessel Error for K/N=1
m (Kaiser−Bessel order)
α opt/J
fo
r m
x er
ror
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3Optimal α −s in terms of Kaiser−Bessel Error for K/N=3
m (Kaiser−Bessel order)
α opt/J
fo
r m
x er
ror
J =4 J =5 J =6 J =7
Fig. 31. Zubalphantomforwardprojectionoptimal z -s in termsof maxerror uwv&xyr 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2Optimal α −s in terms of Kaiser−Bessel Error for K/N=1
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.8
1.9
2
2.1
2.2
2.3
2.4
2.5Optimal α −s in terms of Kaiser−Bessel Error for K/N=1.5
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3Optimal α −s in terms of Kaiser−Bessel Error for K/N=2
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.4
2.5
2.6
2.7
2.8
2.9
3
3.1Optimal α −s in terms of Kaiser−Bessel Error for K/N=3
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
Fig. 32. Zubalphantomforwardprojectionoptimal z -s in termsof NRMS error, uEv&x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 20
A3. ZUBAL PHANTOM BACK-PROJECTION ERRORS (FIG. 32 - FIG. 40)
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
100
101
102
Kaiser−Bessel Error for K/N=1 and m=0
α/J (Kaiser−Bessel width)
Err
or m
x
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−3
10−2
10−1
100
101
Kaiser−Bessel Error for K/N=1.5 and m=0
α/J (Kaiser−Bessel width)
Err
or m
x
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−6
10−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=3 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 33. Zubalphantombackprojectionmaxerrorsfor qyrnt and uwv&x}r 1, 1.5,2 and3
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−1
100
101
Kaiser−Bessel Error for K/N=1 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−4
10−3
10−2
10−1
100
Kaiser−Bessel Error for K/N=1.5 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=2 and m=0
α/J (Kaiser−Bessel width)
Err
or n
rms
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=3 and m=0
α/J (Kaiser−Bessel shape)
Err
or n
rms
J =4 J =5 J =6 J =7
Fig. 34. ZubalphantombackprojectionNRMS errors uwv&xyr 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 21
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
100
101
102
Kaiser−Bessel Error for K/N=1 and α/J =1.55
m (Kaiser−Bessel order)
Err
or m
x
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=1.5 and α/J =2.1
m (Kaiser−Bessel order)
Err
or m
x
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=2 and α/J =2.4
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=3 and α/J =2.65
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 35. Zubalphantombackprojectionmaxerrorsfor differentvales z{v�| and uwv&x}r 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−1
100
101
Kaiser−Bessel Error for K/N=1 and α/J =1.6
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=1.5 and α/J =2.1
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−5
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=2 and α/J =2.35
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Back−Projection Error for K/N=3 and α/J =2.4
m (Kaiser−Bessel order)
Err
or n
rms
J =4 J =5 J =6 J =7
Fig. 36. ZubalphantombackprojectionNRMS errorsfor differentvaluesz{v�| and uwv&x =1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 22
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
100
101
Kaiser−Bessel Error for K/N=1 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or m
x
J =4 α/J=1.2 J =5 α/J=1.4 J =6 α/J=1.45 J =7 α/J=1.55
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=1.5 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or m
x
J =4 α/J=1.95 J =5 α/J=2.1 J =6 α/J=2.1 J =7 α/J=2.1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Back−Proj Error for K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.3J J =5 α
opt=2.35J
J =6 αopt
=2.35J J =7 α
opt=2.4J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Back−Proj Error for K/N=3 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.6J J =5 α
opt=2.65J
J =6 αopt
=2.6J J =7 α
opt=2.65J
Fig. 37. ZubalphantombackprojectionMax errorsfor optimal z{v�| againstq , uwv&x}r 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−1
100
Kaiser−Bessel Error for K/N=1 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=1.2 J =5 α/J=1.55 J =6 α/J=1.5 J =7 α/J=1.6
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−4
10−3
10−2
10−1
Kaiser−Bessel Error for K/N=1.5 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=1.95 J =5 α/J=2.15 J =6 α/J=2.1 J =7 α/J=2.1
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
10−5
10−4
10−3
10−2
Kaiser−Bessel Error for K/N=2 and optimal α/J for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 α/J=2.4 J =5 α/J=2.4 J =6 α/J=2.4 J =7 α/J=2.45
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−7
10−6
10−5
10−4
10−3
10−2
10−1
100
Back−Proj Error for K/N=3 and αopt
for each m
m (Kaiser−Bessel order)
Err
or n
rms
J =4 αopt
=2.5J J =5 α
opt=2.7J
J =6 αopt
=2.6J J =7 α
opt=2.7J
Fig. 38. ZubalphantombackprojectionNRMS errorsfor optimal z{v�| againstq , uEv&x�r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 23
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6Optimal α −s in terms of Kaiser−Bessel Error for K/N=1
m (Kaiser−Bessel order)
α opt/J
fo
r m
x er
ror
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5Optimal α −s in terms of Kaiser−Bessel Error for K/N=1.5
m (Kaiser−Bessel order)
α opt/J
fo
r m
x er
ror
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.8
2
2.2
2.4
2.6
2.8
3
Optimum Values α for K/N=2
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3
Optimum Values α for K/N=3
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
Fig. 39. ZubalphantombackprojectionMax errors- optimumvaluesz againstq , uwv&xyr 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21
1.5
2
2.5Optimal α −s in terms of Kaiser−Bessel Error for K/N=1
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
2.6Optimal α −s in terms of Kaiser−Bessel Error for K/N=1.5
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.8
2
2.2
2.4
2.6
2.8
3Optimal α −s in terms of Kaiser−Bessel Error for K/N=2
m (Kaiser−Bessel order)
α opt/J
fo
r n
rms
erro
r
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3
Optimum Values α for K/N=3
m (Kaiser−Bessel order)
α opt /
J fo
r nr
ms
erro
r
J =4 J =5 J =6 J =7
Fig. 40. ZubalphantombackprojectionNRMS errors- optimumvaluesz againstq , uwv&x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 24
A4. VOXEL AND BLOB-BASED RECONSTRUCTION MAX ERRORS (FIG. 41 - FIG. 48)
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=1 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=1.5 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=3 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 41. Zubalphantomvoxel-basedreconstructionmaxerrorsfor qyrit and uwv&x}r 1, 1.5,2 and3
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
10−1
100
Reconstr Error for 17 iterations, K/N=1 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=1.5 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 310
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=3 and m=0
α/J (Kaiser−Bessel shape)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 42. Zubalphantomblob-basedreconstructionmaxerrorsfor q0r�t and uwv~x}r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 25
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−2
10−1
100
101
102
Reconstr Error for 17 iterations, K/N=1 and α/J =1.7
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−4
10−3
10−2
10−1
100Reconstr Error for 17 iterations, K/N=1.5 and α/J =2.1
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and α/J =2.4
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=3 and α/J =2.7
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 43. Zubalphantomvoxel-basedreconstructionmaxerrorsfor different z{v�| and uwv&xyr 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−2
10−1
100
101
102
Reconstr Error for 17 iterations, K/N=1 and α/J =1.7
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−4
10−3
10−2
10−1
100Reconstr Error for 17 iterations, K/N=1.5 and α/J =2.25
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and α/J =2.45
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=3 and α/J =2.7
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 J =5 J =6 J =7
Fig. 44. Zubalphantomblob-basedreconstructionmaxerrorsfor different z{v�| and uEv&x�r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 26
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−2
10−1
100
101
Reconstr Error for 17 iterations, K/N=1 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=1.8J J =5 α
opt=1.8J
J =6 αopt
=1.65J J =7 α
opt=1.7J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=1.5 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.45J J =5 α
opt=2.25J
J =6 αopt
=2.25J J =7 α
opt=2.1J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.5J J =5 α
opt=2.55J
J =6 αopt
=2.5J J =7 α
opt=2.4J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=3 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.65J J =5 α
opt=2.75J
J =6 αopt
=2.75J J =7 α
opt=2.7J
Fig. 45. Zubalphantomvoxel-basedreconstructionmaxerrorsagainstq and uEv&x}r 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−2
10−1
100
101
Reconstr Error for 17 iterations, K/N=1 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=1.85J J =5 α
opt=1.85J
J =6 αopt
=1.65J J =7 α
opt=1.7J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=1.5 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.3J J =5 α
opt=2.25J
J =6 αopt
=2.25J J =7 α
opt=2.25J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=2 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.55J J =5 α
opt=2.55J
J =6 αopt
=2.5J J =7 α
opt=2.45J
−2 −1.5 −1 −0.5 0 0.5 1 1.5 210
−6
10−5
10−4
10−3
10−2
10−1
100
Reconstr Error for 17 iterations, K/N=3 and αopt
for each m
m (Kaiser−Bessel order)
Em
ax (
%)
J =4 αopt
=2.7J J =5 α
opt=2.8J
J =6 αopt
=2.75J J =7 α
opt=2.7J
Fig. 46. Zubalphantomblob-basedreconstructionmaxerrorsagainstq and uEv&x�r 1, 1.5,2 and3

UNIVERSITY OF PENNSYLVANIA, MIPG AND UNIVERSITY OF MICHIGAN, EECS – TECHNICAL REPORT, MAY 2003 27
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.3
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
Optimal Values α for K/N=1
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.6
1.8
2
2.2
2.4
2.6
2.8
3
Optimal Values α for K/N=1.5
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
Optimal Values α for K/N=2
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3
Optimal Values α for K/N=3
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
Fig. 47. Zubalphantomvoxel-basedreconstructionmaxerrors- optimalvaluesz{v�| againstq , uwv&x}r 1, 1.5,2 and3
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2
Optimal Values α for K/N=1
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 21.6
1.8
2
2.2
2.4
2.6
2.8
3
Optimal Values α for K/N=1.5
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3
Optimal Values α for K/N=2
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
−2 −1.5 −1 −0.5 0 0.5 1 1.5 22.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
3
Optimal Values α for K/N=3
m (Kaiser−Bessel order)
α opt /
J
J =4 J =5 J =6 J =7
Fig. 48. Zubalphantomblob-basedreconstructionmaxerrors- optimalvaluesz{v�| againstq , uwv&x�r 1, 1.5,2 and3














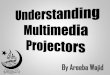














![A FOURIER-BASED APPROACH FOR ITERATIVE 3D …spr.math.princeton.edu/.../files/reconstruction_v4.pdf · [8, 48]. Although X-ray crystallography and NMR spectroscopy can achieve higher](https://img.dokumen.tips/doc/110x75/5f787f35a157f55a6d294f3c/a-fourier-based-approach-for-iterative-3d-sprmath-8-48-although-x-ray-crystallography.jpg)