Embed Size (px)
Citation preview


i ------
@
YIL:4 SAYi:46 EYLÜL1997
GENEL YAYiN YÖNETMENiVE
SAHiBiM.Hulki Cevizoglu
ANABASLiKLAR11
Fizige DayaliAnimasyon
16i'lternet Denen Fii
19
Enerji Problemi22
Delphium veConsolida
25Makina
Ögrenmesi29
Genom Projeleri32
ÖgrenenBilg~~a"yar
37Temel Bilimleri
Yeniden
Kesfediyoruz38
BENKO'danTeknik Çözümler
10 KAPAK KONUSU: BiLGisAYAR ÇAGI-Bugün en ücra yerlerdeki biriyle anindahaberlesme k, çesitli yerlerden her türlü bilgilerialmak mümkün. Dünya adeta global bir köyhaline geldi. Yeryüzünde bu gelismeler olurken,acaba milli kültürler ve dillerin durumu neolacak?
39
Röportaj45
internet ve
Radyo-Tv50
Parmak izi52
Türkçe Dogal Dilisleme
BÖLÜMLER6
Editör8
Türkiye'den Haberler41
Tip Dünyasi54
Kampüs57
P.B. Haber Hatti58
Kampüs
Popüler Bilim, MilliEgitim Bakanligi(T.T.K., Tarih: 27Ekim 1994, Karar
No: 5119) tarafin-dan ortaokul, liseve dengi okullarinögrenci ve ögret-menlerine tavsiyeedilmistir.
POPÜLERBiLiM, Isik Yayincilik Gazetecilik ve Matbaacilik Ltd.Sti. tarafindanaylik olarak yayinlanmaktadir. Ofset Hazirlik: Isik Yayincilik Ltd.Sti. Ofset
Baski: Desen Ofset A.s. Tel: (312) 446 96 96 Renk Ayrimi: Detay Repro Tel:(312) 311 11 '?7 Dagitim: Dünya Süper Dagitim A.s. Tel: (212) 629 08 08
YÖNETiM I\..ERKEZi: Çetin Emeç Bulvari 33/10 06460 DikmeniAnkara, Tel:(312) 479 55 95 (pbx) Fax: (312) 479 55 96 ABONE: (p+p dahil) Yillik:2.400.000.-TL, 6 Aylik: 1.200.000.- TL. (Yurtdisi: Yillik 3.200.000 TL, 6 aylik
1.600.000 TL.) Abone olmak için: Isik Yayincilik Ltd. Sti'nin 536906 nolu
Posta Çeki hesabina abone bedelini yatirip, fotokopisini ya da aslini (faksya da mektupla) merkezimize ulastirmak yeterlidir. ISSN: 1301-3785
Dünyada hersey için,
medeniyet için, hayat
için, basari için en
gerçek yol gösterici
ilimdir, fendir. ilim ve
fennin disinda yol
gösterici aramak gaf-
lettir, cahilliktir, dogru
yoldan sapmaktir.K.Atatürk

i
i',.
;::
~ i - ~
1"-." ~.ofIÇ."'- - ~ ""'~ ~~ii...~_~ A )ii..["!. ~~io.~-
RG[ ;'""E ~y BO.. -. -~r -- """':S r ~ IM. --..w.J _.i An
.,.-- ~~-.. --,.-
~ ."
'./E [;10DE'.LEME-
Nii~ [{ULUii.NIMi
-ir .. "" - U [- "~ir ~ RI'"r
. A.~Ji.. J ...JV~.. 1-
) ~c ' .
~~ESr :ELE~ir~ SE-vi l -~ R=-.= ~=.. ""';"u i.i...i,\;, LO ,g ~ :; ~-
S;.t:.':"AR ~RT AM!f\~~;,
T;.; ::~_ILAy ;"Bil.1ELER~iÇi-.' a;~ 1::TVi i ~ s~r". =
J L- .ai.. .i;;..;L~ J;;;,- LJ.~.
ORT A~it~ Si.4GL~r~MAKT A-
8
Yrd.Ooç.Or. Ugur GüdükbayBilkent Üniversitesi Bilgisayar ve
Enformatik Müh. Böl.
. . V
FIZIGE
i DAYALi
j'8"1 i Q:..i _8
gi€nc€ 2ndüsirisI. reklamcilik, kontrol sisiem-
leri ve uçak simüiatörleri gibi endüstriyel uy.
gulamaiar ve bilimsel arastirma gibi uygulama
alanlari olan animasyon, günümüzün en po-
püler bilgisayar grafigi arastirma alanlarindan
birisidir. Bilgisayar grafigi ve üç boyutlu tasarim ve modellemenin kulla-
nimi tasarimcilarin nesnelerin sekillerini bilgisayar ortaminda tanimlaya-
bilmeleri için bir etkilesimli ortam saglamaktadir. Nesnelerin geometrik
ya da c~birsei basi~'sekillerin b;!eskesi olarak modellenmesi, görüntül€rin
tarama ve doku esieme kuilanilarak simülasyonu ve kullanilabilir görün-
tülerin elde edilme~.jBilgisayar Destekli Tasarim ve Bilgisayar Destekli
Üretim gibi uygulama alanlari için en önemli gereksinimlerdir.
Halen mevcut olan modellerne yöntemlerinin büyük bir kismi kine-
matik yöntemlerdir. Kinematik modellerne yöntemleri nesnelerin sekil-
lerini tanimlamakta yeterli olmakla beraber gerçege uygun animasyon
üretmek sözkonusu oldugunda yetersiz kalmaktadir. Bunun nedeni bu
POPÜLER BiLiM. EYLÜL 1997
yöntemlerin pasif yöntemler olu-sundan kaynaklanmaktadir. Baska
bir deyisle. bu yöntemlerle elde
edilen modeller birbirleri ile ve disetkenlerle etkilesim kuramamak-
tadir . Pek çok nesnenin davranisi
ve sekli nesnenin fiziksel özelliklerikullanilarak belirlenmektedir. Ör-
negin, bir kumas parçasinin baska
nesneler üzerine düsüsü yüzeydeki
sürtünme. kumastaki uzama vegerginlik parameireleri ve dis kuv-
vetler gözönüne alinarak dogru bir
sekilde modellenebilir.
Gerçekçi animasyon üretmekiçin modeller önceden belirlenmis
güzergahlari takip ederken ortam-
daki diger modellerle de gerçek
nesneler gibi etkilesim saglayabil-
melidirler. Bu amaca ulasmak içinfizige dayali modellerne yöntemle-
1i

rinin kullanilmasi gereklidir. Bu
yöntemler: karmasik sekilleresahip modeller üretmede ve bu
modelleri gerçekçi bir sekilde ha-
reket etlirmede çok büyük kolay-liklar saglayabilmektedir.
Fizige dayali modellerne yön-
temleri nesneleri modellernek içinkuwet, kütle, enerji, vb. büyük-
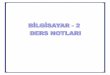
Sekil 2- Animasyon sisteminin kulla-mci arayüzünün ekran görüntüsü.
lükleri kullanmaktadir. Fizige da-
yali modellerin hareketi rijit ve rijitolmayan dinamik yasalari ile belir-
lenmistir. Hareket denklemleri bumodellerin dinamik hareketini ta-
nimlar. Bu denklemler, diferansi-
yel denklem sistemleri olarak olus-
turulduktan sonra, dogrusal
denklem sistemlerine dönüstürüle-
rek çözülür. Denklem sistemleri
çözülürken modeller üzerinde ye-
ralan noktalarin herbirinin pozis-
yonlari ve hizlari, modeller üze-rindeki kuwetlerin de etkileri he-
saba katilarak belirli zaman
araliklarinda bulunur ve bu koor-
dinatlar kullanilarak modeller bir
animasyonun her karesi için bilgi-sayar ekraninda gösterilir.
Deforme edilebilen
modellerin animasyonu
Gerçekçi animasyon üretmede
n2: 2
D~FOPMAELEHOOEL3
~Control Points nl: 2
C HSLOFF
No. planes in x direction: 3
Epsi 1 C PRIMAL FORM. [PRIMAL MENU)Sca li C GRAVITY ON C '*'1ND OFFMovie No frames: 10 Delta t: 1.0
o
i-i
~
m2: 2ii
direction: 3
[HYBRIDMENU) [ALTERNATIVEMENU~
C DOWT SAVEMOVI
L
r
Resolution (1-360): 36
C _GOURAUD_SHADLOFF
No. clanes in z direction: 3 ;....
H1ghly defonaable jellyLess defonaable jellyStretchy rubber sheetCloth behavior
Moderately elast1c objectOther <Speclfy sprlng constant)
vi e
m~
;
sa
~..
.-.... .oJ
Select constrained points us'~ ~'dd'e-button
PC
i
ii
0,0 0,1 0,2 0,3 O,N
Sekil 1-Eias-I 1,0 ! !: ! :: ! ! ! ! 1,Ntiknesneleri 2,0 2,Nmodellemekte
i i i i i ikullam/angrid i i ive numara/an- i i i i i i i i Xdm/masi.
M-1,0 ! ! ! ! ! ! ! M-1,NM,O M,l M,2 M,3 M, N-I M,N

rx .
I-I, J
XI,j-I
X.I, J
X I+1, jSekil 3- Yay kuvvet tormu/asyonun-da e/astik özellik/erin yay kui/vet/erikullanrlarak modeilenmesi.
en önemli problemlerden birisi dedeforme olabilen nesnelerin hare-
ketinin modellenmesidir. Deforme
olabilen nesneleri tanimlamak için
kullanilan diskretizasyon yöntem-
leri. bu nesneleri belirli sayida
nokta kulianarak yaklasik ola;-ak
modelle:nektedir. Bu amaçla
..sonlu fark" ya da i.sonlu eleman"
gibi yöntemler kullanilmaktadir.
Sonlu eleman yönteminde defor-
me olabilen bir nesne belirli sayida
kontrol noktalarindan olusan bir
grid ile modellenebilir. Grid üze-
rindeki noktalar birbirleri ile iliski-
lendirilir ve bu iliskilere göre hare-
ket edebilirler. Bu iliskilendirme
nesnenin elastik özelliklerine göre
degiskenlik gösterir. Sekil i 'de bu
sekilde olusturulmus bir grid ve bu
gridin endekslenmesi gösterilmek-tedir.
Ayrica bu grid üzerindeki nokta
sayisi nesnenin daha kaliteli bir
sekilde modellenmesi ile dogrudan
iliskilidir. Çok sayida nokta kulla-
nilmasi ile nesne daha iyi model-
lenebilir, ancak animasyon üretimidaha fazla zaman alir.
Nesnenin rigidite ve gerginlik
POPÜLERBiLiM. EYLÜL1997
gibi fiziksel özellikleri si-
müle edilerek çok genis
bir yelpazedeki deformeolabilen nesneler (örne-
gin yay, lastik, kagit veelastik metaller) model-
lenebilir. Örnegin. elas-
X . . 1 tik bir yüzeyolusturmak1, J+ için grid üzerindeki
noktalar yaylarla birbir-
lerine baglanabilir ve
yay kuwetleri (yay kat-sayilari sayesinde) nes-
nenin elastikiyetini be-
lirler. Yazinin giris kisminda
belirtilen fiziksel büyüklükler kulla-
nilarak nesnelerin dinamigi mo-dellenebilir.
Bilkent Üniversitesi Bilgisayar
ve Enformatik Mühendisligi Bölü-
münde rijit olmayan (deforme edi-lebilen) modellerin ani-
masyonu için bir sistem
gelistirilmistir (Sekil 2).Bu sistem, modellerin
animasyonu için fizigeve elastisite kuramina
dayanan ve yukaridaana hatiari ile bahsedilen
yaklasimlari kullanmak-
tadir. Ayni zamanda.deforme edilebilen nes-
nelerin animasyonu için
yeni bir yöntem (yay
kuwet yöntemi) gelisti-
rilmistir. Animasyon sis-
teminde "primal" "hib-
rid" ve "yay kuwet"
yöntemleri kullanilarakmodeller hareket ettiril-
mektedir. Bu yolla kulla-
nici yöntemlerin avantaj
ve dezavantajlarina göre
modele uygun olan yön- .
temi seçebilmektedir.
Elastik modellerin sabit engellerle
çarpismasi ve modeller üzerindeki
bazi noktalarin hareketinin kisit-
lanmasi gibi seçenekjer animas-
yonlarda kullanilabilmektedir.
Animasyon sistemi üç boyutlunesneleri modellernek amaci ile
olusturulan bir modellerne sistemi
üzerinde çalismaktadir. Bu sistemBezier yüzeyleri ve "süperquadrik"
nesneleri kullanarak üç boyutlu
nesneleri modellernekte ayrica bu
yöntemlerle olusturulan düzenlimodeller üzerinde "kivirma".
"bükme", "inceitme" gibi düzenli
deformasyonlar ve i.serbest-form
deformasyon" teknikleri uygula-r.arak düzensiz nesneler de mo-
dellenebilmektedir. Bu yöntemler-
le olusturulan statik modeller
yukarida bahsedilen üç tekniklehareket ettirilmektedir.
(a.)k=l (b) k=5
(c) k=lO (cl) k=20
(e) k=30
Sekil 4- Dört kösesinden sabitlenmisdegisik e/astik özellik/ere sahip mo-dellerin düsüsü.
13

Animasyon sistemi C prog-
ramlama dili kullanilarak Unix is-
letim sistemi ile çalisan is istas-
yonlari üzerinde geIistirilmistir.Nesnelerin sabit engellerle çar-
pismasi kisaca söyle modellen-mektedir: Sabit nesnenin mate-
matiksel fonksiyonu kullanilarakelastik modeldeki noktalarin bu
sabit nesneye girip girmedigi her
zaman araligi için test edilir. Sabit
nesnenin içine giren her noktaya
vektörel olarak ters yönde bir
kuwet uygulanir.
Primal ve hibrid formulasyon-lar nesnelerin elastik özelliklerini
kullanirken elastisite matrislerini
kullanmaktadir. Primal formulas-
yon dogrusalolmayan bir formu-
lasyon oldugundan elastisite mat-
risleri degiskendir . Teorik olarak
elastik materyallerin
modellenmesi için
en iyiyöntem budur.
Hibrid formulasyon
ise dogrusal bir for-
mulasyondur. Azdeforme olabilen
modeller için dogru-
salolmayan defor-
masyonlar dogrusal-
mis gibi alinabilir.
Böylece elastisitematrisleri sabit hale
geldiginden hesap-
lamalarda büyük öl-
çüde zaman tasarru-
fu saglanir . Yay
kuwet formulasyo-
nunda ise, olusturul-
masi çok zamanalan elastisite mat-
.~..-.
D
(
,J -
a
~ !';:;~ ~ ~ '~ ~
i
i ''-..i'.
...,~l.i.
Sekil 5- Elastik bir tabaka dört kösesinden sabitlen-mis bir sekilde düserken,
Sekil 6- Elastik bir tabaka kütle merkezinden sabitlen-mis bir sekilde düserken.
Sekil 7- Bir kumas parçasi sabit bir engelle çarpisirken.
14 POPÜLER BiLiM. EYLÜL 1997
J

risleri yerine dis yay kuvvetleri kuilanila-rak elastik özellikler modellenmektedir
(Sekil 3).
Simulasyonörnekleri
Yay kuwet formulasyonunda, yay sa-
bitlerine degisik degisik degerler vererek
degisik elastik özellikler elde etmek
mümkündür. Sekil 4'de ayni gride degisik
elastik özellikler verilmis ve grid dört kö-
sesinden sabitienmistir. Seklin her bir
kis'l1idegisik bir modelin yer çekimi etkisi
ile di'serken belli bir zaman geçtikten
sonraki halini göstermektedir. Sekiller,
5,6.7,8,9 ve lÜ'da gelistirilen animasyon
sistemi kullanilarak üretilen degisik ani-
masyon ö nekl ri verilmektedir.Kaynakça1. A.H. Barr. .Superquadrics and angle-
preservingtransformations". IEEEComputerGraphicsand Applications.Vol. i. No. i. pp.11-23 January 1981.
2. A.H. Barr. "Globaland localdeformati-
Sekil 10- E/astik bir tabaka simit sek-linde bir sabit engelden geçerken.
POPÜLER BiLiM. EYLÜL 1997
Sekil 8- E/astik bir tabaka simit seklinde bir sabit engelle çarpis/fken.
Sekil9- E/astikbir tabaka küçük delik/i simit sek/inde bir sabit en-gelle çarp/sirken.
ons of solid primitives." ACMComputer Graphics (Proc.SIGGRAP'84). Vol. 18. No.3.pp. 21-30. July 1984.
3. P.Bezier. NumericalControl - Mathematics andApplications. John Wiley andSons. London. 1972.
4. U.Güdükbay. "Elastik ola-rak deforme olabilen modellerinfizige dayali animasyonu." Dok-tora Tezi, Bilkent ÜniversitesiBilgisayar ve Enformatik Mü-hendisligi Bölümü. Subat1994.
5. T.W. Sederberg and S.R. Parry.
"Free-form deformation of solid geo-metric models. .. ACM ComputerGraphics (Proc. SIGGRAPH'86). Vol.20. No. 4, pp. 151-160. Augu~1986.
6. D.Terzopoulos. J.Platt. A.H.Barr. and K.Fleischer. ..Elastically De-formable Models". ACM ComputerGraphics (Proc. SIGGRAPH'87), Vol21, no 4. pp. 205. July 1987.
7. D. Terzopoulos and K.Fleischer."Modeling Inelastic Deformation: Vis-coelasticity, Plasticity. Fracture," ACMComputer Graphics (Proc. SIGG-RAPH'88), Vol 22. No 4. pp. 269-278. Aufust 1988. .
15
![Java Coding 6 - Bilkent Universitycs.bilkent.edu.tr/~erman/CS101/Set8.pdf · setOfValues –int[] Easy Problem with Methods! •Identify method signatures from algorithm 1. read set](https://img.dokumen.tips/doc/110x75/5e811109791d5d4e6f348725/java-coding-6-bilkent-ermancs101set8pdf-setofvalues-aint-easy-problem.jpg)