Embed Size (px)
Citation preview

Fisica Sperimentale 2
Prof. Gabriele Spina1
24 settembre 2010
1Dip. Fisica Università di Firenze Via Sansone 1 50019 Sesto Fiorentino - Email: [email protected]

1
Commento
La difficoltà del corso di Fisica I sta più nella novità del metodo che nella vastità dei contenuti. Esatta-
mente opposta è la situazione nel caso del secondo corso di Fisica.
È quindi necessario puntualizzare una "chiave di lettura" che aiuti nell’affronto dei singoli
argomenti e che ne permetta la concatenazione logica. In quanto segue farò riferimento ad alcuni
argomenti del corso, per cui questo commento, per essere utile, dovrà essere riletto di tanto in tanto.
Anche se vasto, anzi proprio per questo, il corso permette di cogliere tutta l’evoluzione del modo con
cui, in un arco di circa un secolo e mezzo, l’uomo ha guardato alla natura. Basti per questo considerare
l’evoluzione del concetto di “campo”, attorno al quale, a ben vedere, tutti gli argomenti presentati ruotano.
Non vorrei banalizzare troppo la cosa, ma ricordo come esso venne introdotto in Fisica allorchè ci
si accorse che certi fenomeni avrebbero potuto implicare l’esistenza nella natura di una qualche forma
di "intelligenza" e quindi l’impossibilità di una descrizione dei fenomeni naturali attraverso quel metodo
scientifico che si era venuto affermando. Tale concetto di Campo introdotto, e puntualizzo giustamente
introdotto, per motivi "esorcistici" si è evoluto in un modo a priori impensabile e che non può mancare
di stupire.
All’inizio esso è una mera "appendice" degli oggetti materiali ( legge di Coulomb, legge di Ampere )
ma, ad un certo punto, si mostra capace di una "vita propria" ( Equazioni di Maxwell ). Inoltre esso
viene via via assumendo le caratteristiche che prima si pensavano proprie delle sole particelle materiali :
la necessità di esprimere in forma locale le leggi di conservazione porta a tale conseguenza.
Come la storia andrà a finire è argomento di altri eventuali corsi, ma credo che la strada sia già ben
delineata.
Questa vicenda è materialmente costituita, come del resto anche tutta la nostra stessa vita, di tanti
fatti piccoli e grandi, belli e brutti che si concatenano tra loro e che sono l’uno premessa dell’altro. In
tutto questo traspare la tenacia, l’intelligenza, la passione e l’amore che l’uomo pone nello studio di ciò
che lo circonda. Cos’altro sta, ad esempio, dietro tutto il lavoro di Ampere?
È pure evidente che gli esiti di tale fatica sono ben più grandi dell’impegno profuso, per cui essi sono
da guardare con rispettosa meraviglia (vedi ad esempio tutto ciò che deriva dal semplice termine aggiunto
da Maxwell in una equazione).
Credo opportuno sottolineare tale ultimo concetto attraverso le parole pronunciate da Richard Feyn-
man, premio Nobel per la Fisica, come introduzione ad una sua lezione: "Questa è la terza di quattro
lezioni su di un argomento abbastanza difficile, la teoria dell’elettrodinamica quantistica. Essendo presen-
te più gente delle volte precedenti è chiaro che alcuni non hanno sentito le altre lezioni, per cui troveranno
questa quasi incomprensibile. Anche chi le ha sentite la troverà incomprensibile, ma sa già che la cosa è
perfettamente normale; come ho spiegato nella prima lezione il modo di cui disponiamo per descrivere la
natura ci risulta, in generale, incomprensibile".
2
Queste frasi sembrano quantomeno bizzarre: “incomprensibile” vuol ultimamente dire “non in mano
mia”. Esse colgono, a mio avviso, lo studio della natura come strumento di “rapporto” con "Qualche
Cosa” oltre me. È proprio questo che rende così affascinante lo studio della natura.
Le misure di Ampere sono poi un esempio della materialità di questo rapporto.
In primo luogo l’osservazione dei fenomeni. Una osservazione talmente curata in tutti i particolari, da
rendere evidente che l’osservare è ben più di un “banale” guardarsi attorno. Esso implica una posizione
“di domanda” dell’uomo di fronte alla realtà.
In secondo luogo, come diceva pure Galileo, non esiste esperienza a prescindere da un giudizio: senza
una capacità di valutazione non esiste esperienza. I dati osservati vanno valutati. Ciò viene fatto appli-
cando ad essi, come ipotesi positiva di interpretazione, quei criteri che in passato siano risultati adeguati.
Questo non significa che i criteri restino immutati, al contrario ne permette l’evoluzione senza perdere
quanto di adeguato vi fosse in essi.
Da questi passaggi ha origine la scoperta.
Quanto sopra è talmente vero che in passaggi fondamentali quali quelli relativi all’induzione elettro-
magnetica od al termine aggiuntivo di Maxwell la novità emerge quasi “in sordina” e lo studente non
attento può correre il rischio di non vederla.
Alcuni ulteriori esempi
• trovo una espressione per la densità di energia elettrostatica ove compare il potenziale elettrico. Per
quale motivo dico che non è adatta, e proseguo nei calcoli per ricercarne un’altra in cui compaia
solo il campo elettrico? Alla fine trovo una espressione del tipo cercato; per quale motivo la accetto
anche se sembra condurre a conseguenze “assurde”?
• l’esperienza mi dice solo la direzione della forza che agisce su di un tratto di filo percorso da
corrente elettrica. Per quale motivo affermo anche che essa è proporzionale al valore della corrente,
alla lunghezza del filo ed al valore del campo magnetico?
Per terminare una nota.
La fisica non è matematica, la sua logica interna non è quella di un teorema, ma è un tentativo di
descrizione organica di ciò che vediamo accadere. Al posto d’onore vi è, quindi, il dato sperimentale.
La matematica ovviamente serve, ma solo come strumento. Se una data matematica non si dimostrasse
adatta se ne cercherebbe subito un’altra. In passato questo è successo e probabilmente succederà ancora.
Il dato sperimentale, invece, non può mai essere accantonato.
Quindi, per essere pratici, suggerisco una scaletta per l’affronto dei vari argomenti.
Va, prima di tutto, capito quale è il dato sperimentale, cosa contiene di nuovo rispetto ai precedenti
ed in cosa è simile ad altri.
In secondo luogo deve essere chiara l’ipotesi interpretativa, che è in precedenza risultata adeguata,
all’interno della quale ci si muove nell’affronto del nuovo dato.

3
Nel caso di varie ipotesi interpretative, il criterio di scelta si basa solo sulle evidenze sperimen-
tali delle ipotesi in confronto e sulla possibilità di previsione di nuove situazioni da poter verificare
sperimentalmente.
Solo a questo punto, per ultimo, viene l’aspetto matematico.

Parte I
Introduzione
4

5
Come avete visto lo scorso anno l’equazione fondamentale della dinamica è F = ma = mdpdt . Tale
equazione descrive come una particella di massa “m” modifichi il suo moto sotto l’azione di una forza F .
Ma quali tipi di forze esistono in natura? Nel corso di Fisica 1 avete incontrato forze gravitaziona-
li, elastiche, di attrito, viscose. Quest’anno studieremo un’altro tipo di forze: quelle elettromagnetiche.
Con l’elettromagnetismo classico non si chiude la descrizione dei possibili meccanismi di interazione
nella materia ( basti pensare alle cosiddette forze nucleari debole e forte). Per andare oltre, occorre però
entrare in quella descrizione della natura fornitaci dalla meccanica quantistica.
L’esistenza delle interazioni elettriche e magnetiche era nota fino dalla antichità. Come sapete fin
dal liceo, già nel 600 a.C. era noto come pezzetti di paglia fossero attratti da ambra strofinata ( Talete
da Mileto). Era pure noto che un particolare minerale (magnetite) ha la proprietà di attrarre il ferro.
Certamente tutti sapete come, avvicinando un braccio al cinescopio del televisore, si veda e si senta la
peluria sollevarsi. Essa è infatti attratta dal televisore. Sapete pure dal liceo che bacchette strofinate e
sospese a fili mostrano l’esistenza di forze attrattive o repulsive a seconda dei materiali di cui sono fatte.

Capitolo 1
Elementi fisici di partenza
a b
Figura 1.1: Forze tra bacchette cariche: a) di segnoopposto si attraggono, b) dello stesso segno che sirespingono
I ricordati fenomeni, ed altri similari, conducono
alla introduzione in Fisica di una nuova grandez-
za: la Carica Elettrica. Per poter interpretare
in modo soddisfacente le forze sia attrattive che
repulsive si è condotti, come sapete, ad introdur-
re due tipi di carica elettrica chiamati convenzio-
nalmente carica elettrica positiva e carica elettrica
negativa (cariche dello stesso segno si respingono, cariche di segno opposto si attraggono). Per pura con-
venzione di dice positiva la carica accumulatasi nel vetro strofinato, negativa quella accumulatasi nella
gomma.Vedi figura 1.1.
+
+ +
-
Figura 1.2: Tramite un elettoscopio si può verificarese una bacchetta è carica
+
+ + -
++
+ -
-
-
Figura 1.3: Semplice esperienza che prova l’esistenzadi due tipi di “fluidi” elettrici
È facile "elettrizzare" (cioè depositare cariche
elettriche su) bacchette di vetro, di plastica, di
gomma ed altre ancora. Più difficile è "elettrizza-
re" bacchette metalliche. Per riuscirvi occorre ave-
re l’accortezza di non toccarle direttamente con le
mani e di non porle a contatto con altri oggetti me-
tallici ( ricorderete certamente le esperienze in cui
si elettrizzano delle bacchette metalliche provviste
di una impugnatura di vetro).
Cosa significa tutto ciò?
Significa che in alcuni materiali le cariche elet-
triche sono libere di muoversi mentre in altri non
lo sono.
Possiamo domandarci se quello dello strofinamento sia l’unico modo per accumulare una carica elet-
trica su di un corpo. Come sapete la risposta è negativa: ve ne è pure un altro, molto utile nel caso
6

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 7
Figura 1.4: Carica di una sfera per induzione: si collega, tramite un filo conduttore la sfera a terra; siavvicina la sbarretta elettrizzata; si taglia o si brucia il filo e si allontana infine la bacchetta. le caricherichiamate da terra restano così intrappolate nella sfera.
+
- +++ +-
- -+
++
+
Figura 1.5: Semplice modo per caricare due sfere metalliche con cariche di segno opposto ma ugualemodulo: si connettono le sfere con un sottile filo metallico; si avvicina ad una delle due sfere la bacchettaelettrizzata; si brucia il filo e si allontana infine la bacchetta
si voglia depositare una carica elettrica su conduttori isolati, che si basa sul fenomeno della cosiddetta
induzione elettrostatica. A titolo di esempio, senza alcuna pretesa di completezza, si riporta, tramite le
figure 1.2, 1.3, 1.4 e 1.5 la descrizione di quattro semplici esperienze note già dagli studi precedenti.
Quanto detto fino ad ora ha solo un carattere qualitativo, per andare avanti occorre misurare
la forza che si instaura tra cariche elettriche, mettendo in relazione il valore numerico di detta
grandezza vettoriale con i parametri caratterizzanti il sistema: valore delle cariche e loro posizione relativa.
Sorge subito una difficoltà:
si può dire se due cariche sono o meno dello stesso segno, ma come fare per stabilire se due cariche
sono uguali o se una è, ad esempio, il doppio di un’altra?
La figura 1.5 mostra un modo per ottenere cariche uguali ma di segno opposto. Fatto questo, prendia-
mo una ulteriore sfera, scarica ma identica alle precedenti, e poniamola in contatto per un breve istante
+++
+ ++
++
++
+++
++
+
++++
++
+
+
+Q
+Q/2 +Q/2
+Q/2 +Q/4 +Q/4
Figura 1.6: Metodo per generare cariche in rapporto noto partendo da una carica “Q”. Si pone a contattodella sfera carica una seconda sfera identica ma scarica, ottenendo due sfere con carica “Q/2”. Si avvicinapoi ad una delle due una terza sfera scarica ottenendo le cariche “Q/2”, “Q/4” e “Q/4”. Il procedimentopuò proseguire a piacere.
CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 8
con una di queste, ad esempio con quella caricata positivamente. La carica Q si distribuirà sulle due
sfere. Per simmetria, esse dovranno contenere la stessa quantità di carica. Ponendo poi in contatto
una ulteriore sfera con una delle due del punto precedente, otterremo cariche che stanno nei rapporti 1,
0.5, 0.5 . Procedendo ancora otterremo cariche che stanno tra loro nei rapporti 1, 0.5, 0.25, 0.25 come
illustrato in figura 1.6. Lo stesso procedimento si ripete poi partendo dalla carica negativa.
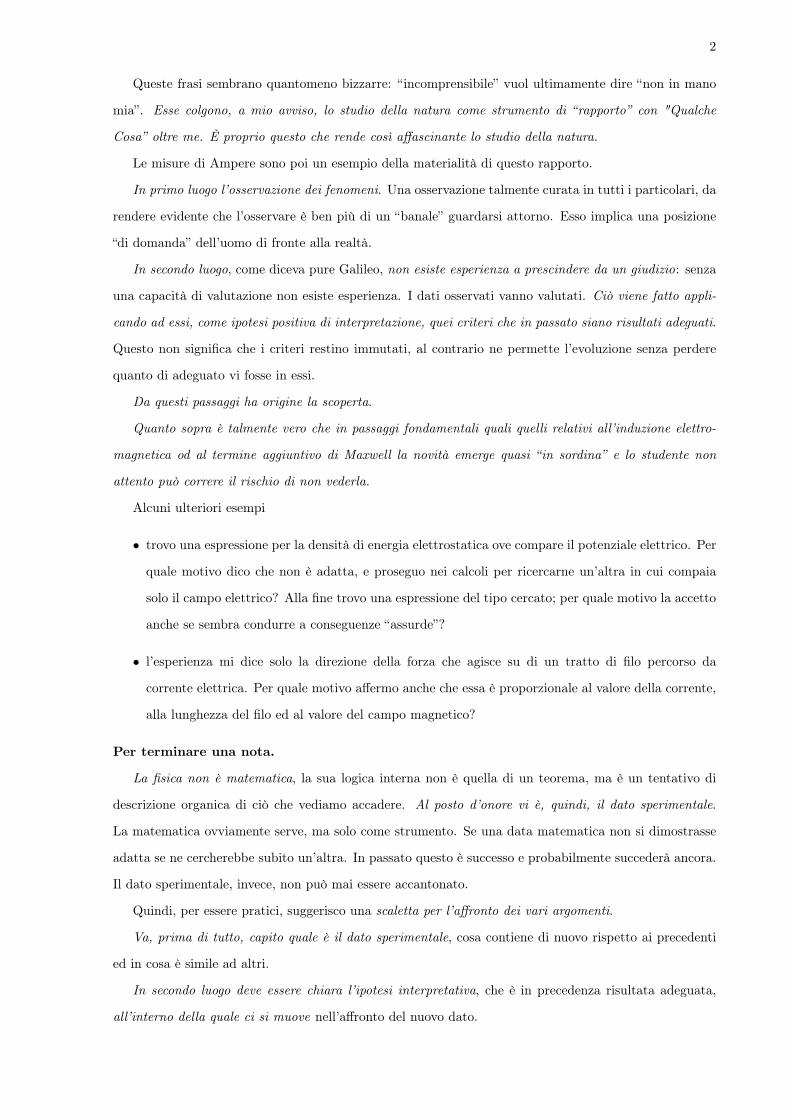
Una volta che si siano depositate su sferette cariche elettriche i cui valori stiano tra loro in rapporti
noti, si possono misurare le forze che si instaurano tra detti oggetti per mezzo, ad esempio, di una bilancia
di torsione, come quella mostrata in figura 1.7 .
Si effettueranno misure variando cariche, diametri delle sfere e distanze tra i centri per vedere se i
valori sperimentali possano essere interpretati tramite un qualche tipo di legge.
Figura 1.7: Bilancia di Coulomb
Il risultato che si ottiene è che la forza tra due
sferette cariche è diretta come la congiungente i
centri delle stesse, è attrattiva se le cariche sono
di segno discorde, repulsiva nel caso opposto. Per
quanto riguarda il modulo, esso dipende dalla di-
stanza tra le sfere ed è proporzionale all’inverso
del quadrato della distanza tra i centri. Il modu-
lo dipende inoltre linearmente dal prodotto delle
cariche depositate sulle sferette ( q1 q2).
Questo risultato prende il nome di Legge di
Coulomb (1785) .
In formule si scrive: F ∝ q1q2r2 ove compare il
segno di proporzionalità ∝. Questo perché, quanto scritto, sarà vero a meno di una costante dipendente
dalle unità di misura adottate per la nuova grandezza carica elettrica.
L’unità di misura per la carica elettrica nel sistema internazionale prende il nome di Coulomb. Dal
punto di vista fisico, la carica elettrica è la grandezza fondamentale. Essa non è tuttavia adatta come
unità di misura fondamentale. È infatti difficile depositare su di un corpo in modo riproducibile una
determinata quantità di carica, utilizzabile per definire l’unità di misura della grandezza. È invece facile
ottenere un flusso di cariche elettriche ben definito, costante e riproducibile. Per questo il Cuolomb non è
stato posto tra le unità di misura fondamentali del sistema ma compare come unità derivata. L’unità di
misura fondamentale nel sistema internazionale è l’unità di corrente ( flusso di carica elettrica) definito
come vedremo nel seguito e che prende il nome di Amper. Un Coulomb risulta essere quindi dato dalla
carica che attraversa in un secondo una qualsiasi sezione di un filo percorso da una corrente stazionaria
di 1A. Dimensionalmente avremo[q] = [i] · [t].
In figura 1.8 riportiamo l’insieme delle unità di misura facenti parte del Sistema Internazionale. Sono
evidenziate le unità fondamentali e le unità derivate. Così definita l’unità di misura di carica elettrica, la

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 9
Figura 1.8: Mappa delle unità di misura nel Sistema Internazionale. Per le unità derivate è mostratala loro costruzione a partire dalle fondamentali: le linee continue e tratteggiate indicano rispettivamenteproporzionalità dirette ed inverse
costante di proporzionalità da introdurre nella legge di Coulomb prende un valore circa uguale a 9 · 109.
Potremmo indicare tale costante semplicemente introducendo una lettera (ad esempio K ) al secondo
membro della legge di Coulomb. In realtà si preferisce scrivere tale costante in modo più complicato
(questo per fare sì che altre formule, che di fatto si utilizzano più della legge di Coulomb, possano essere
scritte in forma più semplice).
Scriveremo quindi per la forza agente sulla carica q1 dovuta alla presenza della carica q2 posta a
distanza r2,1 = r:
F1 =1
4π0
q1q2r2
er (1.1)
dove 14π0
∼= 9 · 109Nm2/C2 od anche 0 ∼= 8.85415 · 10−12C2N−1m−2 ed er = e2,1 è il versore che punta
dalla carica 2 verso la carica 1.
Pure per questo tipo di forze vale il Principio di Sovrapposizione e di esso ne faremo nel seguito
largo uso ( la dipendenza lineare dalle cariche delle formule sopra scritte è, tra l’altro, una conseguenza
di esso).
Come sapete dal liceo, la carica elettrica è quantizzata. Una qualunque carica che possiamo trasmet-
tere ad un corpo sarà un multiplo intero della carica dell’elettrone ( o del protone). Il valore assoluto
delle cariche di dette particelle vale: e 1.60206 · 10-19C .
È immediato riconoscere che la legge di Coulomb ha la stessa struttura matematica della legge di
Gravitazione Universale, vedi corso di Fisica 11. Ora, la materia è ordinariamente costituita da elettroni,
protoni e neutroni e le prime due particelle, avendo sia massa che carica, interagiscono tra loro sia tramite
forze elettriche che gravitazionali.1 F g
1 = −Gm1m2
r2er ove il segno (−)indica che la forza gravitazionale è sempre attrattiva.

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 10
Particella Simbolo Carica MassaProtone p +e 1.67252·10−27KgNeutrone n 0 1.67482·10−27KgElettrone e− -e 9.1091·10−31Kg
Tabella 1.1: Massa e carica delle particelle che ordinariamente costituiscono la materia
Protone e sua struttura interna
Storia dell’Universo
Figura 1.9: Il rapporto tra le intensità delle forze elettriche e quelle gravitazionali è circa uguale alrapporto esistente tra le dimensioni dell’universo e quelle di un protone o di un elettrone
È interessante confrontare l’intensità di dette interazioni paragonando l’attrazione gravitazionale tra
un protone ed un elettrone con l’ attrazione elettrica tra le stesse particelle ( il paragone è immediato in
quanto entrambe obbediscono alla stessa legge dell’inverso del quadrato della distanza). Otteniamo, indi-
pendentemente dalla interdistanza tra le particelle FeFg
= 1G·4πε0
q1q2m1m2
, ove G è la costante gravitazionale
che vale G (6.67428± 0.0007) · 10−11m3kg−1s−2 .
Dato che il valore di questo rapporto non dipende dalla interdistanza tra le particelle, che è l’unico
parametro che noi possiamo variare, esso è pertanto una caratteristica della natura. Introducendo i valori
delle varie costanti, si ricava che la forza elettrica è più intensa di quella gravitazionale per un fattore
∼ 1039 . In altri termini basterebbe che la carica degli elettroni variasse, per un qualche motivo, di una
parte su ∼ 10−39 per produrre forze dell’ordine di quelle gravitazionali.
Ma come possiamo raffigurarci cosa significhi un fattore di scala come quello trovato?
Come sapete le forze sono grandezze vettoriali, rappresentabili quindi graficamente tramite frecce.
Per farci una idea di cosa significhi il rapporto trovato consideriamo che, se scegliessimo di rappresentare
la forza con cui le due particelle interagiscono gravitazionalmente tramite una freccetta lunga quanto
il raggio di un elettrone ( 10−15m) , vedi pagina 121dovremmo rappresentare la corrispondente forza
elettrostatica tramite una freccia lunga 1024m, lunga cioè quanto il raggio dell’intero universo; vedi figura
1.9
Sul valore di questo rapporto si fonda inoltre la base sperimentale della legge di conservazione della
carica elettrica.
Ad esempio: cosa accadrebbe se, in seguito ad una reazione chimica, la carica degli elettroni di valenza

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 11
variasse anche solo di una parte su di un miliardo?
Cosa accadrebbe nel laboratorio?
Figura 1.10: L’immagine fornisce visivamente larisposta!
Provi lo studente a rispondere, domandandosi
poi se, per la sua esperienza, la risposta concordi
con ciò che in laboratorio realmente accade.
Da questo si traggano infine conclusioni a ri-
guardo della conservazione della carica elettrica a
seguito di reazioni chimiche.
Possono sorgere delle domande.
1) Con forze così grandi, i corpuscoli di un da-
to segno scaglierebbero lontano quelli carichi dello
stesso segno; la materia al contrario è stabile. Da dove deriva quindi la stabilità della materia?
Figura 1.11: Effetto delle forze elettriche su di unmiscuglio di particelle di opposto segno
Notiamo però come un miscuglio composto di
corpuscoli positivi e negativi in uguale quantità
si comporterebbe in modo totalmente diverso da
quanto detto. A causa delle forze repulsive tra
corpuscoli carichi dello stesso segno e di quelle at-
trattive tra corpuscoli carichi di segni opposti, do-
po un breve istante, ciascun corpuscolo di un segno
verrà ad avere, come primo vicino, un corpuscolo
di segno opposto, come mostrato nella parte supe-
riore della figura 1.11. I corpuscoli di segni opposti saranno costretti ad avvicinarsi quanto più possibile,
precipitando l’uno verso l’altro. Il risultato è che le enormi forze singolarmente esercitate dai due cor-
puscoli vicini su di un terzo, facente parte di una coppia diversa, si compenseranno quasi esattamente,
come mostrato nella parte inferiore della medesima figura. Per cui fra due frazione separate di un tale
miscuglio di cariche non vi saranno praticamente nè attrazioni nè repulsioni elettrostatiche. Sopravvive-
ranno solamente le interazioni gravitazionali in quanto, anche se piccole, esse sono solo attrattive per cui
si sommano costruttivamente tra loro.
Le forze elettriche appariranno solo alla scala delle interdistanze tra le particelle di segno opposto.
Detta scala è quella atomica: sono le piccole cariche non compensate o la diversa distribuzione delle
stesse che danno luogo a quelle forze che sono alla base dei legami chimici.
2) Come è possibile allora che esistano gli atomi?
Come mai l’elettrone di un atomo di idrogeno non precipita sul protone ma resta localizzato ad una
certa distanza da esso?
Cerchiamo di capire cosa accade. L’elettrone sarà attratto dal protone e così facendo vi cadrà descri-
vendo un’orbita a spirale. Come mai ad un certo punto questo collasso delle cariche di un segno su quelle

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 12
dell’altro si arresta?
Ciò è dovuto all’intervento di una legge fisica nuova.
Tale legge prende il nome di Principio di Indeterminazione ed è introdotto nella descrizione Quanti-
stica della natura.
Nel caso che si applichi tale principio alle grandezze impulso e posizione di una particella si scrive:
∆x · ∆p dove ∆p e ∆x sono le indeterminazioni nell’impulso e nella posizione della particella
mentre 1.054 10−34J · s è una costante universale. Per un elettrone che percorra un’orbita attorno
al nucleo avremo una indeterminazione nella sua coordinata “x” data da x = 2r, ove “r” è il raggio
dell’orbita. Ora se l’elettrone si avvicina molto al nucleo, x sarà piccolo ed avremo quindi grandi valori
per p = (mv) ∼= mv . In questa situazione può allora accadere che l’elettrone acquisti una velocità
talmente grande da farlo sfuggire all’attrazione del nucleo. È per questo che ∆x non può essere inferiore
ad un dato valore e quindi l’elettrone dovrà necessariamente restare ad una certa distanza dal nucleo.
Vediamo di calcolarci l’ordine di grandezza di questa distanza.
Dette Et l’energia totale ed Ep ed Ec quelle potenziale e cinetica avremo che Et = Ep + Ec =
− 14π0
e2
r + p2
2m = −rmv2
r + p2
2m = − p2
2m
Ad un ∆p corrisponderà pure un Et e, se Et ≈ Et , l’orbita non sarà più definita. Dato che
Et =2p·p2m , la condizione sopra detta significa che 2p·p
2m ≈ p2
2m e quindi p·2r ≈ p2
2 da cui si ricava che
p ≈ r .
Per valutare il raggio dell’atomo dobbiamo quindi vedere per quale valore di “r” la relazione sopra
scritta sia soddisfatta. Sostituendo in 14π0
e2
r2 = m v2
r = p2
mr , si ricava facilmente che r ≈ 4π02
me2
5 · 10−10metri.
Come riconoscete, il valore trovato è circa uguale ad a0 .
Il principio di indeterminazione impedisce quindi che il collasso prosegua oltre un certo limite ed è
per questo che si possano formare oggetti di dimensioni finite quali gli atomi.
3) Sorge la domanda:
Come fanno i nuclei a restare uniti, essendo costituiti da un complesso di particelle positivamente
cariche?
Il motivo è che i nucleoni ( protoni e neutroni) interagiscono tra loro pure tramite altre forze. In
particolare essi interagiscono tramite la forza nucleare forte che varia con la distanza più rapidamente
di r−2. Tale forza è attrattiva e molto più intensa di quella elettrica per distanze dell’ordine dei 10−15
metri. A causa di ciò, in un nucleo, ciascun nucleone interagisce con i soli nucleoni a lui vicini tramite
le forze nucleari attrattive, mentre interagisce con tutti attraverso le forze elettromagnetiche che sono
repulsive. Ne deriva che i nuclei piccoli tenderanno ad essere stabili. In un nucleo grosso, al contrario,
le repulsioni elettrostatiche tendono a prevalere, rendendolo instabile. Per questo motivo non esistono in
natura nuclei con numero di massa “A” superiore a circa 240, vedi figura 1.12.

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 13
Figura 1.12: Diagramma N-Z. Affinchè il nucleo sia stabile, in esso devono esssere presenti anche neutroniil cui effetto è di distanziare tra loro i protoni, diminuendo quindi l’effetto delle forze repulsive elettriche.Per nuclei leggeri è sufficiente un numero di neutroni pari a quello dei protoni mentre, all’aumentaredi Z, occorre un numero di neutroni via via maggiore. Oltre Z=82 le repulsioni elettriche prevalgonoindipendentemente dalla presenza dei neutroni e non possono quindi esistere nuclei stabili.
Inoltre un nucleo pesante, per il quale l’effetto della forza forte prevalga solo lievemente rispetto a
quello dell’interazione elettrica, può facilmente decadere ( es. Uranio Z=92). Può bastare la piccola
deformazione causata da un urto con un neutrone lento, perché nel nucleo, prevalgano le repulsioni
elettriche. Esso allora si spezza ed i frammenti carichi vengano scagliati lontano l’uno dall’altro dalle
forze elettriche. L’energia che si libera, che è di natura elettrica e non nucleare, può essere usata in vario
modo; dall’utilizzo in centrali nucleari per la produzione di corrente elettrica fino a quella devastante
della bomba atomica.
Concetto di campo
Tornando alla legge di Coulomb, equazione 1.1, essendo la forza F agente su di una carica q pro-
porzionale ad essa, si potrà scrivere:−→F = q · −→E ove
−→E prende il nome di Campo Elettrico. Il concetto
di campo elettrico non differisce nella sostanza da quanto avete già visto in meccanica a proposito del
campo gravitazionale; in particolare la sua introduzione è motivata dalle stesse argomentazioni che avete
visto nel corso precedente. Esso descrive una modificazione delle proprietà fisiche dello spazio con cui la
carica q interagisce localmente.
Nel caso in cui la forza agente sia dovuta alla presenza della sola carica “Q”, considerata come
puntiforme, l’espressione di E, nel punto ove sia presente la carica q è semplicemente data dalla:
−→E =
1
4πε0
Q
r2−→er (1.2)
ove r è la distanza da Q ed −→er il versore che da Q punta verso q.
Riprendo qui brevemente solo un aspetto.
Dato che ogni grandezza fisica deve essere misurabile si pone la domanda: Come si può dunque misu-
rare l’intensità e la direzione di un campo elettrico in un determinato punto dello spazio? Evidentemente
misurando le forze che agiscono su cariche di prova.
CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 14
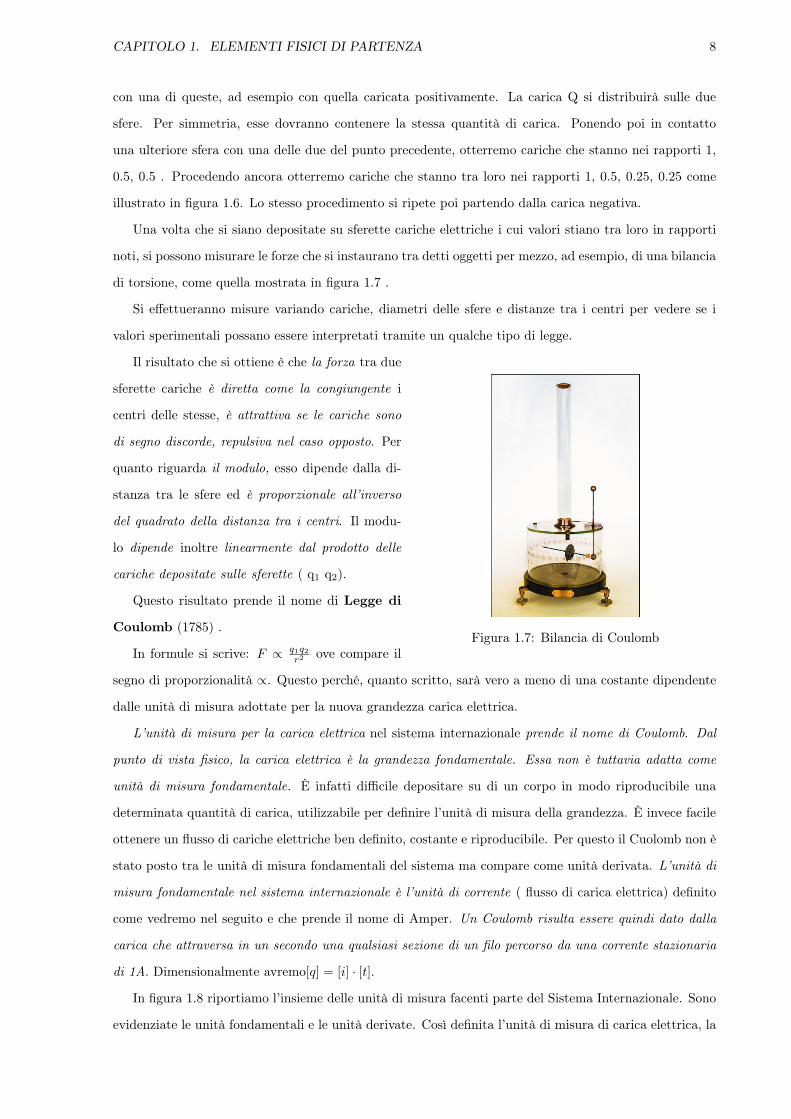
Carica Diametro in cm10−8 110−8 510−10 110−12 510−15 110−20 5
Tabella 1.2: Tabella valori di carica
Quali criteri dovremo seguire per scegliere il valore di dette cariche e le caratteristiche fisiche (forma,
dimensioni, materiale) del supporto su cui depositarle?
Supponiamo ad esempio che a generare il campo sia una carica Q pari a 10−8 Coulomb depositata su
di una sferetta metallica di 10 cm di diametro. Supponiamo inoltre che abbia a disposizione, per misurare
tale campo, le cariche depositate su sferette come indicato in tabella 1.2
Quale carica o cariche sarà opportuno adoperare? Tra i dati forniti vi è qualche cosa di strano?
Come ricorderete il campo ( elettrico) si definisce operativamente come E = limq→0Fq . Che significato
si dà a questa espressione?
Diretta conseguenza della additività delle forze è l’additività dei campi. Il campo generato da più
cariche elettriche è uguale alla somma vettoriale dei campi dovuti alle singole cariche. A dire il vero
questa proprietà non è valida in generale, ma di questo possiamo non preoccuparcene in quanto solo per
campi estremamente elevati si possono osservare deviazioni.
Come mai ci aspettiamo che per campi elevati il principio di sovrapposizione cada in difetto?
Come può essere visualizzato il campo Elettrico?
Sono classiche le esperienze con semi di forma allungata che galleggiano su liquidi isolanti.
Come potranno essere rappresentati i campi, ed in particolare il Campo Elettrico?
Figura 1.13: Mappa Isobarica dell’Europa
Le modificazioni delle proprietà fisiche dello
spazio vengono descritte associando a ciascun pun-
to dello spazio il valore di una opportuna grandezza
matematica. Si vengono così a definire i campi.
Il tipo di grandezza matematica varia ovvia-
mente da caso a caso. La situazione più semplice
si ha quando si può associare a ciascun punto del-
lo spazio una grandezza scalare. Si parla in questi
casi di campi scalari (es. campo di temperatura).
In casi più complessi occorre associare a ciascun
punto dello spazio una grandezza di tipo vettoriale e si parla in questo caso di campi vettoriali ( es.:
campo gravitazionale, campo elettrico ... ).
Dei campi, sia scalari che vettoriali, se ne possono dare delle rappresentazioni grafiche.

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 15
Nel caso dei campi scalari si possono tracciare superfici o linee ove giacciono i punti in cui il campo
assume identico valore (es.: superfici isoterme nel caso di un campo di temperature; curve di livello nel
caso di una carta geografica, mappe isobariche ) come in Figura 1.13.
Più complesso è il caso di campi vettoriali. Dovremo infatti dare una rappresentazione grafica che
indichi sia modulo che direzione e verso del campo. Si potrebbe ad esempio scegliere un certo numero di
punti e disegnare per ciascuno di essi il vettore rappresentativo. Oppure potremmo tracciare delle linee
che siano, punto per punto, tangenti alla direzione del campo.
Figura 1.14: Rappresentazione di un campo vetto-riale di modulo costante ma avente direzione dipen-dente dal particolare punto dello spazio. Notare co-me occorra, per rappresentare anche la costanza delmodulo, disegnare linee discontinue.
Una freccetta sulla linea servirà poi ad indicare
il verso. Se inoltre si stabilisce (regola di Gauss)
che il numero di linee attraversanti una superficie
unitaria ed avente normale parallela alla direzio-
ne del campo sia proporzionale all’intensità dello
stesso, si ottiene una rappresentazione grafica suf-
ficientemente adeguata in quanto fornisce pure in-
formazioni riguardanti il modulo del campo. In
generale, per mantenere la proporzionalità tra nu-
mero di linee e modulo del campo, dette linee non
sono continue.
Ad esempio, la figura 1.14 rappresenta un
campo avente modulo costante ma direzione che cambia da punto a punto.
La rappresentazione grafica dei campi non è tuttavia in grado di tradurre il fatto che essi sono additivi.
Cosa significa infatti “sommare due disegni”? Per questo, e per altri motivi su cui torneremo in seguito,
i campi si possono rappresentare in modo adeguato solo attaverso funzioni matematiche. La matematica
ci insegna infatti a calcolare la somma di due funzioni.
Differenze tra le leggi di Coulomb e della Gravitazione Universale
Chiusa questa parentesi a carattere generale, torniamo alle interazioni elettriche.
A dispetto dell’analogia formale tra legge di Coulomb e legge della Gravitazione Universale, i due tipi di
interazione vengono trattati in modo profondamente diverso. È opportuno chiarire subito la motivazione
di ciò.
La legge di Coulomb descrive la forza tra due cariche elettriche soltanto nel caso in cui entrambe
siano ferme. In generale le forze elettriche dipendono dal moto delle cariche e ne dipendono per giunta
in modo complesso. In generale, come vedremo in seguito, dato un sistema di cariche, la forza agente su
una di esse è esprimibile come−→F = q( E + v × B). Dove v è la velocità della carica q, ed E e B sono
due campi vettoriali eventualmente dipendenti dal tempo. Il vettore E è il Campo Elettrico, mentre B
prende il nome di Campo Magnetico.

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 16
La forza continua ad essere proporzionale alla carica e per entrambi i campi continua a valere il
principio di sovrapposizione. Volendo, si possono scrivere le espressioni per E e B dovute ad una carica
singola in moto generico in termini della sua posizione e velocità ed, usando il principio di sovrapposizione,
si possono ottenere le espressioni per i campi elettrico e magnetico relativi ad un arbitrario sistema di
cariche. Una volta noti i campi, è nota pure la forza ed è quindi possibile studiare il moto della particella
carica risolvendo l’equazione differenziale F = q( E + v × B) = dpdt = m0
ddt (
v1− v2
c2
).
Siamo quindi teoricamente in grado di risolvere qualsiasi problema usando procedimenti simili a quelli
visti in meccanica.
La difficoltà deriva dal fatto che i campi E e B sono dovuti non alle posizioni ed alle velocità attuali
delle cariche ma a quelle relative a determinati istanti nel passato. Per questo, ad esempio, vanno incluse
nel calcolo non solo le cariche attualmente presenti ma anche quelle eventualmente esistenti nel passato
e non più sussistenti.
Consequentemente le espressioni dei campi Elettrico e Magnetico dovuti ad una particella in moto sono
complicate. Per rendersene conto basta esplicitarle per un generico punto dello spazio. Tali espressioni
sono solo anticipate e verranno ricavate a tempo debito; vedi equazione (7.28). Dato che la carica è in
moto e che le informazioni non possono viaggiare con velocità maggiore di quella della luce, la posizione
in cui la vediamo ( detta posizione “apparente”) non è quella in cui la carica effettivamente si trova e
potrebbe anche darsi che nel frattempo la carica sia andata distrutta. Non essendo accessibile la posizione
attuale della carica, i campi dovranno essere espressi in termini della posizione apparente. Si trova:
E(t) =q
4πε0[e
r2+ (
r
c)d
dt(e
r2) +
1
c2d2
dt2e] B (t) =
e × E
c(1.3)
dove e è il versore che individua la direzione ed il verso del punto in cui andiamo a considerare il campo
rispetto alla posizione della carica, mentre r è la distanza. L’apice stà ad indicare che si tratta di posizioni
apparenti.
Il primo dei tre termini nell’espressione di E non rappresenta altro che il campo dovuto alla legge di
Coulomb, in cui la posizione reale è sostituita da quella apparente.
Il secondo termine è dato dal prodotto della derivata temporale del primo per il rapporto ( r
c ) . Dato
che ( r
c ) non è altro che il tempo che impiega la luce per percorrere il tratto r, questo termine sembra
stia ad indicare che la natura cerca di indovinare dove si trovi attualmente la carica che genera il campo.
Esso è pertanto strutturalmente simile al primo.
Il terzo termine è invece diverso dai due precedenti ed predomina sugli altri a grandi distanze. Differisce
dai precedenti sia in quanto è diretto perpendicolarmente alla linea di vista sia per la diversa dipendenza
con la distanza; il suo modulo dipende infatti da r−1 invece che andare come r−2.
Vediamo di capire il motivi di dette caratteristiche andando per esercizio ad esplicitare questo ultimo
termine.
Analizziamo cosa accade in un intorno dell’istante t = t0. In un tempuscolo τ la carica che genera il

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 17
!y(t0,")
!x(t0,")
!r(t0,")
e(t0+")
e(t0) p
q
r
Figura 1.15: Variazione del versore indicante la posizione apparente di una carica in termini dellospostamento della stessa
campo si sposta di r = r (t0, τ).
Riferendosi alla figura 1.15, rappresentiamo lo spostamento r nella somma di una componente
parallela alla linea di vista e di una componente ad essa normale: r = xi+yj. Si vede subito che
e varierà nel tempo solo in virtù della componente di r ad esso perpendicolare, rappresentato nella
figura da y. Se la sorgente è molto lontana si avrà poi, a meno di termini di ordine superiore e facendo
riferimento sempre a figura 1.15, che: e (t0 + τ) e (t0)−jy(t0,τ)r(t0)
Dato che t = t0 + τ si avrà quindi
d2
dt2e
t=t0=
d2
dτ2e (t0 + τ)
τ=0 −j y(t0)
r(t0). Il terzo termine
nell’espressione di E diviene pertanto j q4πε0c2
ay(t− rc )
r , ove si è riscritto t0 semplicemente come t.
Quindi il campo elettrico a grandi distanze varia come 1r , è normale alla congiungente la posizione
apparente della carica con il punto in cui si considera il campo e dipende infine dalla componente della
accelerazione normale alla linea di vista.
Esprimere i campi in un punto direttamente in termini delle cariche che li generano e delle loro posizioni
è possibile ma, come vedete, si ottengono espressioni complicate composte da termini strutturalmente
differenti.
Si trova invece che esistono delle semplici relazioni che legano tra loro i valori dei campi in punti tra
loro molto vicini.
Per descrivere i fenomeni elettromagnetici si preferisce quindi scrivere tali relazioni, calcolando tramite
esse i valori dei campi.
L’altra faccia della medaglia è che occorrerà fare uso di una “matematica” più elaborata di quella
necessaria per la trattazione degli argomenti del primo corso di Fisica.
Riepilogo dei punti principali della sezione
Scoperta di un tipo nuovo di forze ( forze elettriche) ed identificazione del corrispondente soggetto
agente ( carica elettrica).
La legge di forza è “simile” alla gravitazionale ma con tre differenze:
• la forza elettrica può essere sia attrattiva che repulsiva,
• è enormemente più grande dell’analoga gravitazionale

CAPITOLO 1. ELEMENTI FISICI DI PARTENZA 18
• la somiglianza vale solo per i casi statici.
Dall’enorme valore del rapporto tra forze elettriche e gravitazionali deriva l’evidenza sperimentale della
conservazione della carica elettrica.
Le forze elettriche sono additive.
Introduzione del concetto di Campo Elettrico,
Se le forze sono additive pure i campi lo sono.
Rappresentazioni grafiche dei campi, pregi e difetti. La rappresentazione adeguata si ottiene solo
tramite espressioni matematiche.
Necessità di una matematica più eleborata di quella necessaria per una semplice descrizione dei
fenomeni meccanici.

Capitolo 2
Un pò di matematica
Per poter affrontare lo studio dell’elettromagnetismo sono necessarie alcune nozioni matematiche.
Nulla di particolare: tuttavia, dato che alcuni studenti manifestano difficoltà cercherò di introdurre
alcuni concetti. Farò questo senza alcuna pretesa di “rigore matematico” per cui il mio caldo consiglio è
di non usare quanto sotto per la preparazione di alcun esame di analisi matematica.
Una premessa di metodo
Colgo l’occasione per ricordare che la matematica è presente in fisica solo come strumento. Sebbene
essa non sia semplicemente un linguaggio, è vista in fisica come tale. Dal punto di vista fisico quindi,
la matematica, come tutti i linguaggi, è utile nella misura in cui riesce ad esprimere i contenuti in
modo efficace. Questo significa che non dovete preoccuparvi in primo luogo dell’aspetto matematico degli
argomenti.
Per rimarcare la cosa sottolineo come, sebbene le leggi fisiche vengano scritte sotto forma di relazioni
matematiche, il significato della loro scrittura differisca da quello di normali equazioni matematiche.
Per esempio F = ma non è una relazione matematica del tipo (a+ b)2 = a2 + b2 + 2ab .
Il secondo membro di questa ultima relazione deriva dal primo in seguito alla applicazione di regole.
Il segno “=” significa: “applica delle regole algebriche, a priori stabilite, a ciò che precede e troverai
necessariamente ciò che segue”.
In fisica, invece, il segno “=” connette grandezze che non avrebbero “a priori” alcun motivo per essere
tra loro connesse: la forza è una grandezza “fisicamente” diversa da una massa o da una accelerazione. Il
segno di uguaglianza significa che il risultato di una misura di forza coincide, entro gli errori sperimentali,
con il prodotto del risultato di una misura di massa con quello di una misura di accelerazione. Notiamo
pure come gli strumenti necessari per le tre misure siano profondamente diversi tra loro.
Il segno “=” in fisica attesta in definitiva un risultato sperimentale imprevedibile a priori, che solo
delle misure attestano essere vero ( è simile alla “→” presente nella scrittura delle reazioni chimiche).
Tuttavia, proprio in quanto le leggi fisiche connettono i risultati di misure, che sono numeri, la
matematica “serve” e quindi va saputa usare. Dovrebbe essere però chiaro che dovete preoccuparvi di
19

CAPITOLO 2. UN PÒ DI MATEMATICA 20
cogliere in primo luogo l’aspetto “fisico” degli argomenti e, solo dopo, andare a vedere come i dati “fisici”
vengano scritti ed analizzati utilizzando la matematica. A mio avviso, non porsi in questa posizione di
fronte allo studio della fisica, rende solo più difficile la comprensione degli argomenti.
Chiarito ciò, veniamo quindi alla introduzione di alcune necessarie nozioni matematiche.
Radianti e steradianti
Un angolo piano è definito come quella regione di piano delimitata da due semirette aventi un estremo
a comune. Nella figura 2.1 le semirette sono indicate con “a” e “b” e l’estremo comune con “O”.
Gli angoli piani si misurano in radianti; l’unità di misura è definita come segue.
Prendiamo una circonferenza di raggio arbitrario che abbia il centro nel vertice dell’angolo. Le due
semirette intersecheranno detta circonferenza in “A” e “B”. Il valore in radianti dell’angolo è dato dal
rapporto tra la lunghezza del tratto di circonferenza intercettata ed il raggio della stessa: Ω = A−Br .
Detto rapporto non dipende dal raggio della circonferenza scelta e caratterizza quindi l’angolo. Un angolo
giro vale 2π radianti.
a
b
r A
BO
S
r
Figura 2.1: Definizioni di: angolo piano e sua misurain radianti ( parte superiore) ; angolo solido e suamisura in steradianti ( parte inferiore)
La definizione di angolo solido è analoga dal
punto di vista logico. Si definisce angolo solido
quella regione di spazio delimitata da un fascio di
semirette aventi in comune un estremo ( un cono
in altri termini ). Gli angoli solidi si misurano in
steradianti, e la loro definizione segue la falsariga
della definizione di radiante.
Dato che siamo nello spazio, invece che nel pia-
no, prenderemo una superficie sferica centrata sul
vertice dell’angolo come mostrato in figura 2.1. Il
valore dell’angolo solido in steradianti sarà dato
dal rapporto tra la porzione di superficie sferica
intercettata ed il quadrato del raggio della sfera.
Avendo diviso per il quadrato del raggio, detto rapporto sarà indipendente dal raggio della sfera e sarà
quindi una caratteristica dell’angolo. Al massimo, un angolo solido potrà valere 4π steradianti.
Elemento infinitesimo di volume in coordinate sferiche
In coordinate cartesiane, un elemento infinitesimo di volume sarà scritto come dV = dx dy dz .
Come potremo scrivere una analoga quantità in coordinate sferiche?
Riferendosi alla figura 2.2 in cui è mostrato il punto generico di coordinate (r, θ,ϕ) , domandiamoci
come potremmo costruire un volumetto infinitesimo avente un vertice in detto punto.

CAPITOLO 2. UN PÒ DI MATEMATICA 21
Figura 2.2: Coordinate Polari
Prendiamo per questo tre direzioni ortogona-
li tra loro: la prima radiale ed uscente, la secon-
da e la terza tangenti rispettivamente al meridia-
no ed al parallelo passanti per il punto. Piccoli
spostamenti lungo le tre direzioni saranno espres-
si rispettivamente dalle componenti del vettore
(dr, r dθ, r sin (θ) dϕ) ove gli angoli sono espressi
in radianti. L’espressione per il volumetto infinite-
simo avente vertice in (r, θ,ϕ) sarà quindi data da
dV = dr · r dθ · r sin (θ) dϕ che riscriviamo come:
dV = r2sin (θ) dr dθ dϕ (2.1)
Detto volumetto ha spessore “dr”, per cui occupa una porzione di superficie della sfera pari a:
dS = r2sin (θ) dθ dϕ (2.2)
Per quanto detto poi a proposito di angolo solido, avendo dS = r2dω , otterremo pure l’espressione per
l’angolo solido infinitesimo:
dω = sin (θ) dθ dϕ (2.3)
Integrale
Il concetto di integrale è simile a quello di sommatoria. La differenza principale consiste nel fatto
che, mentre nella sommatoria si sommano un numero discreto di elementi finiti, l’integrale corrisponde
alla somma di un numero infinito di termini tutti infinitamente piccoli. Per passare dalla sommatoria
all’integrale occorre fare un limite:
i=1,N
fi −→fi→0,N→∞
ˆ
V
df . Nell’integrale scritto, ciò che si somma
sono le quantità infinitesime df formalmente poi espresse come prodotto di una grandezza finita per una
infinitesima: df = df (r) = ρ (r) dv. Si scrive quindi:´V df =
´V ρ (r) dv.
Per fissare le idee, la massa di un corpo, ad esempio una sveglia, la possiamo ottenere come somma
delle masse di tutte le parti che la compongono: ingranaggi, vitoline e quanto altro. Scriveremo quindi la
massa della sveglia come una sommatoria di un numero finito di termini ciascuno dei quali avente valore
finito. Nulla ci vieta, a priori, di rompere anche ogni ingranaggio, lancetta e vitolina in modo da avere un
numero grandissimo di pezzi ciascuno dei quali avente massa infinitesima. La somma di tutte le masse
degli infiniti pezzi in cui ho oramai polverizzato l’oggetto dovrà dare la massa totale della mia ex-sveglia.
Come potrò scrivere il singolo addendo della mia somma infinita?
Essendo una massa infinitesima, si indica usualmente premettendo una “d”. Nel nostro caso quindi:
dm.

CAPITOLO 2. UN PÒ DI MATEMATICA 22
Per quale motivo la massa del singolo addendo è infinitesima?
Essa è piccola soltanto in quanto occupa un volume piccolo: tanto più piccolo è il volume del granellino,
tanto più piccola è la massa associata. Per esprimere detta origine del valore infinitesimo scriveremo quindi
dm = ρ (r) dv
ove dv è il volume occupato e ρ (r) il valore finito della densità del materiale. Dato che la sveglia sarà
fatta da vari tipi di materiale (metalli, plastiche, vetro . . . ), la densità dipenderà da punto a punto.
Per questo motivo abbiamo scritto ρ (r), ove il vettore di posizione indica il punto della sveglia da cui
proviene il singolo granellino di materiale. Si scriverà in definitiva
MSveglia =
ˆ
V
ρ (r) dv
ove “V” è il volume occupato dalla sveglia.
Come è chiaro dall’esempio appena fatto, la funzione integranda ha le dimensioni di una densità.
Densità di che cosa?
Ciò chiaramente dipenderà dal significato fisico dell’integrale. Potremo quindi avere densità di massa,
di carica, di energia ed altro ancora.
A seconda del dominio di integrazione, potremo inoltre avere densità lineari, superficiali o di volume.
Infatti, oltre ad integrali di volume come quello dell’esempio, troveremo integrali detti “integrali di linea”
ed “integrali di superficie”.
In detti integrali il dominio di integrazione non è un volume, ma è costituito rispettivamente da
linee “Γ” o da superfici “S” qualunque, definite in uno spazio vettoriale. Le quantità infinitesime che
andremo a sommare saranno quindi espresse rispettivamente da dg (x) = λ (x) dx e da dg (r) = σ (r) ds.
Nella prima, dx indica la lunghezza di un tratto infinitesimo di linea posto ad “x” metri dal suo inizio.
Nella seconda, ds indica la porzione infinitesima di superficie la cui posizione è definita dal vettore r.
Scriveremo quindi per detti integrali espressioni qualiˆ
Γ
λ (x) dx o´S σ (r) ds . Notiamo pure come la
classica espressione´ ba f (x) dx può essere vista come un particolare “integrale di linea” il cui dominio di
integrazione è costituito da un segmento dell’asse delle “x”.
In particolare, come vedremo, avremo spesso a che fare con due forme integrali che prendono rispet-
tivamente i nomi di flusso e circolazione. Il primo è un integrale di superficie mentre il secondo è un
integrale di linea.
Flusso
Si definisce flusso di un campo vettoriale ( ad esempio del campo elettrico E ) attraverso una superficie
infinitesima ds la seguente grandezza scalare infinitesima dΦE
ds= E · nds dove n è la normale alla

CAPITOLO 2. UN PÒ DI MATEMATICA 23
superficie ds. Nel caso di superfici finite si scriverà ovviamente:
ΦS
E=
ˆ
S
E · nds
Più esplicitamente:
1. dividiamo la superficie “S” in un numero infinitamente grande di superfici infinitesime ds
2. associamo a ciascuna di esse la grandezza scalare infinitesima E · nds definita, punto-punto tramite
il valore localmente assunto dal campo elettrico e dal vettore normale alla superficie
3. sommiamo le infinite grandezze infinitesime di cui al punto precedente.
Se la superficie è aperta si hanno due possibilità di scelta equivalenti per la direzione della normale n .
Figura 2.3: Flusso attraverso una superficie aperta
Riferendosi alla figura 2.3, la normale può es-
sere diretta verso l’alto o verso il basso; le due
scelte sono equivalenti, non essendovi a priori mo-
tivo alcuno per privilegiare una delle due. Nel caso
invece di superfici chiuse, le due direzioni non sono
più equivalenti. Una normale punta infatti verso
l’interno mentre l’altra punta verso l’esterno della superficie. In questo caso si sceglie in genere la norma-
le esterna, cosicchè un valore positivo per l’integrale indica un flusso uscente mentre un valore negativo
indica un flusso entrante.
Perché a questo integrale di da il nome di Flusso?
n
V!n
VdS1
dS2
v metri
Figura 2.4: Flusso del vettore velocità di un fluido
Se il campo che si considera è il campo v di ve-
locità che descrive il moto di un fluido, la quantità
sopra detta esprime il volume di liquido che attra-
versa la superficie S nell’ unità di tempo. Conside-
riamo infatti la figura 2.4 . Il volume di liquido che
attraversa in un secondo la superficie infinitesima
ds1 , con normale parallela al vettore velocità, è uguale a quello contenuto nel volume evidenziato in colore
avente per base il ds1 stesso ed altezza pari al modulo del vettore velocità. In formule dV (ds1) =| v | ds1
. Il volume che attraversa la superficie ds2 , sempre nell’unità di tempo, sarà evidentemente ugua-
le al precedente. Dato che ds2 =ds1
cos (θ)si ha dV (ds2) = dV (ds1) =| v | ds1 =| v | ds2 cos (θ) e quindi
dV (ds2) = v · nds2 ove si riconosce l’espressione del flusso infinitesimo del vettore v.
Circolazione
Proviamo a porci la seguente domanda: Prendiamo un fluido che si muova e consideriamo il connesso
campo di velocità v come l’esempio mostrato in figura 2.5.

CAPITOLO 2. UN PÒ DI MATEMATICA 24
Figura 2.5: Uragano Linda
Consideriamo una linea chiusa Γ come quella
mostrata in figura 2.5. Domandiamoci se vi è un
movimento rotazionale netto lungo essa. In altre
parole supponiamo di poter bloccare istantanea-
mente il fluido in tutti i punti eccetto che in un
sottile tubo a sezione costante s che si chiuda su
se stesso lungo detta linea.
La parte di fluido contenuta nel tubo
continuerà a muoversi o meno?
Chiaramente il liquido continuerà a muoversi
se c’è più impulso diretto in un senso che nel senso
opposto.
Prendiamo un elemento generico del tubo di lunghezza dl. L’impulso posseduto dal fluido contenuto
nel volumetto sarà dato da: dp = v dm = v ρ s dl. Le pareti del tubo, generate dal fluido solidificato,
potranno esercitare solo forze normali al dl per cui solo la componente di dp parallela alla tangente alla
linea Γ sopravvivrà e sarà responsabile della eventuale circolazione del liquido. Indicando con dp = ρ sv ·dl tale componente, il liquido resterà fermo o circolerà a seconda che
¸Γ dp sia nulla o meno. Supponendo
costanti sia la sezione “s” che la densità del fluido, il tutto si ridurrà al calcolo di˛Γv · dl lungo la
linea chiusa Γ. Questo integrale prende il nome di circolazione ed è sovente indicato con il simbolo¸Γ.
Chiaramente il campo di velocità v è sostituito nell’elettromagnetismo dai campi E e B.
Questi integrali sono importanti in quanto le equazioni fondamentali dell’elettromagnetismo, che
prendono il nome di Equazioni di Maxwell, si possono scrivere, come cederemo, per mezzo di flussi e
circolazioni.
ΦS
E= Q
ε0ΦS
B= 0
¸ΓE · dl = − d
dtΦS
B
c2¸ΓB · dl = ΦS( J)
ε0+ d
dtΦS
E
Due note di analisi matematica:
1. Se conosciamo il valore della grandezza f (x, y, z) nel punto di coordinate r0 = (x0, y0, z0) quale
stima possiamo dare del valore della stessa nel punto (x0 + dx, y0 + dy, z0 + dz) molto vicino al
precedente? Sappiamo che: f(x0 + dx, y0 + dy, z0 + dz) = f (x0, y0, z0) + df con
df df
dx
r0
dx+
df
dy
r0
dy +
df
dz
r0
dz (2.4)
ove ciascuna derivata è valutata nel punto di coordinate r0 .
2. Se si deve derivare una funzione rispetto a più variabili, si possono eseguire le derivazioni in
qualunque ordine, per cui ad esempio: d2f(x,t)dxdt = d2f(x,t)
dtdx

CAPITOLO 2. UN PÒ DI MATEMATICA 25
x
y
z
!n
x
y
z
n
z’ "
x
y
z
n
z’
#
x’
Figura 2.6: Rotazioni di Eulero per passare da un vecchio an un nuovo sistema di coordinate.
Alcune definizioni e relazioni di algebra vettoriale che trovano applicazione.
Prima di tutto cosa è un vettore.
Il vettore per antonomasia è quella grandezza che, nello spazio, definisce la posizione di un picco-
lo oggetto rispetto ad un altro. Per questo motivo esso non dipende dal sistema di coordinate, ma è
univocamente definito una volta che siano dati i due oggetti.
Come noterete, ho usato il termine “piccoli oggetti” e non “punti”. Ciò non è casuale ma ha una
motivazione: un “punto” è fisicamente interessante solo in quanto vi è un oggetto o vi accade qualche
cosa che può essere rivelato in quanto vi è un oggetto. La Fisica è un tentativo umano di descrizione di
ciò che realmente esiste e quindi la distanza è sempre tra oggetti.
Chiaramente, quando poi vada ad esplicitare matematicamente il mio vettore ho bisogno di un sistema
di coordinate. In detto sistema esso sarà espresso da una terna di numeri; ad esempio, scegliendo un
sistema di coordinate cartesiane ortogonali, le tre componenti lungo x, y e z.
Cambiando sistema di coordinate, il mio vettore sarà espresso da una diversa terna di numeri che dovrà
essere tuttavia deducibile dalla precedente nota l’orientazione del nuovo sistema rispetto al vecchio.
È quindi ovvio che, in generale, una terna di numeri non rappresenta automaticamente un vettore;
per essere un vettore occorre che, a seguito di una generica rotazione del sistema di coordinate, le tre
componenti si trasformino tra loro nello stesso identico modo in cui si trasforma la terna di numeri che
descrive la posizione relativa di due oggetti. Solo in questo caso, cambiando sistema di coordinate, la
grandezza rimane “solidale” con il complesso di oggetti che costituisce il sistema fisico.
Dette Vi e V i , con i ∈ 1, 2, 3, le componenti del vettore V nei due sitemi, le nuove componenti
si possono ottenere tramite opportune combinazioni lineari delle vecchie. Usualmente i coefficienti si
esprimono tramite la terna di angoli di Eulero ψ, θ, ϕ esprimenti i valori di tre successive rotazioni,
come mostrato da figura , utilizzabili per passare dalla vecchia alla nuova situazione.
Indicando con Ri (θ) una generica rotazione di un angolo θ attorno all’asse i si ha: R (ψ, θ, ϕ) =
Rz (ϕ)Rn (θ)Rz (ψ) e V i = RijVj dove la matrice di rotazione è data da:
Ri,j =
cos (ϕ) cos (ψ)− cos (θ) sin (ϕ) sin (ψ) cos (ϕ) sin (ψ) + cos (θ) sin (ϕ) cos (ψ) sin (θ) sin (ϕ)
− sin (ϕ) cos (ψ)− cos (θ) cos (ϕ) sin (ψ) − sin (ϕ) sin (ψ) + cos (θ) cos (ϕ) cos (ψ) sin (θ) cos (ϕ)
sin (θ) sin (ψ) − sin (θ) cos (ψ) cos (θ)
ove n indica la linea dei nodi.

CAPITOLO 2. UN PÒ DI MATEMATICA 26
Perché si abbia una grandezza vettoriale occorre che le sue tre componenti, nel passare da un sistema
di coordinate ad un altro, si trasformino secondo la regola sopra data.
Operazioni tra vettori
Due vettori si possono sommare. Il vettore risultante ha per componenti la somma delle componenti
omologhe dei vettori dati. In formule, le componenti del vettore C = A+ B sono date da Ci = Ai+Bi i ∈
x, y, z . Questa regola è conosciuta anche sotto il nome di regola del parallelogramma.
I vettori A, B si possono pure moltiplicare tra loro e sono definiti due tipi di moltiplicazioni. Si
introducono infatti i prodotti scalare e vettoriale. Essi sono definiti come segue:
1. Prodotto scalare, il cui risultato è una grandezza scalare : A · B = AxBx +AyBy +AzBz = s
2. Prodotto vettoriale, definito come C = A × B è una grandezza vettoriale le cui componenti sono:A× B
x= AyBz +AzBy ,
A× B
y= AzBx +AxBz ed infine
A× B
z= AxBy +AyBx
Detti prodotti godono delle seguenti proprietà
1. A× A = 0
2. A ·A× B
= 0
3. A ·B × C
= C ·
A× B
4. A×B × C
= B
A · C
− C
A · B
Operatori Gradiente, Divergenza e Rotore
Prima di tutto: cosa intendiamo per operatore?
Un operatore O è l’indicazione di una procedura che permette di associare ad una funzione generica
ψ una seconda funzione ϕ. In formule: ϕ = Oψ.
Esempi di operatore possono essere la moltiplicazione di una funzione per un numero assegnato oppure
il farne la derivata rispetto ad una delle sue variabili; un altro esempio consiste nell’eseguirne l’integrale.
La semplice definizione dell’operatore dice solamente cosa dobbiamo fare ma non ci dice su che cosa
dobbiamo operare: la funzione che dobbiamo derivare o di cui dobbiamo fare l’integrale. Veniamo adesso
agli operatori che ci interessano in questo momento.
Le equazioni dell’elettromagnetismo possono essere scritte, oltre che in termini di flussi e circolazioni,
anche in forma contenente operatori differenziali. Occorre quindi introdurre detti operatori.
Prendiamo per questo un campo scalare ( ad esempio il solito campo di temperatura) e supponiamo
di essere interessati a descrivere come la temperatura vari da punto a punto. Supponiamo in altre parole
di essere interessati allo studio delle derivate della temperatura rispetto alla posizione.
Domandiamoci sotto quale forma potrà comparire, in una legge fisica, la derivata della temperatura
rispetto alla posizione.
Potrà una Legge Fisica, ad esempio, dipendere da dTdx : la derivata della temperatura rispetto alla
coordinata x?

CAPITOLO 2. UN PÒ DI MATEMATICA 27
Per rispondere a questa domanda si deve notare, ricordando anche quanto detto a proposito delle
grandezze vettoriali, come le leggi fisiche leghino tra loro grandezze aventi una loro individualità e che
pertanto sono indipendenti dal particolare sistema di coordinate utilizzato.
Si pensi ad esempio ad F = ma ; questa è una relazione tra grandezze vettoriali che sono caratteristiche
del sistema fisico in esame. La forza che agisce sulla Terra ha un significato fisico in quanto è diretta
verso il Sole e ciò non dipende dal particolare sistema di coordinate che possiamo scegliere. Identica
indipendenza vale inoltre per la sua massa e per la sua accelerazione, per cui anche queste hanno significato
fisico.
Ora evidentemente dTdx dipende dal sistema di coordinate. Cambiando sistema, cambia la direzione
lungo cui valutare la derivata. Analoga constatazione vale per le altre due possibili derivate: dTdy e dT
dz .
È quindi chiaro che dTdx non potrà comparire ( da sola) in alcuna legge fisica.
Ma potrebbe dTdx essere la "componente x" di una grandezza vettoriale? Potrebbe cioè
dTdx ,
dTdy ,
dTdz
essere una grandezza vettoriale?
Bisogna vedere come si trasforma la terna di numeri
dTdx ,
dTdy ,
dTdz
passando da un sistema di
coordinate ad un altro.
Come si può quindi rispondere rapidamente alla domanda ?
Un modo è il seguente:
Se prendo due vettori e li moltiplico scalarmente tra loro ottengo uno scalare che, come tale, non varia
cambiando sistema di coordinate; ad esempio A · B = s che è una quantità scalare.
Di quanto detto vale anche l’inverso. Se si osserva che la somma dei prodotti delle tre componenti
di un vettore per altrettante espressioni, di cui non siano note le proprietà di trasformazione, forma uno
scalare, allora le tre espressioni sono le tre componenti di una grandezza a carattere vettoriale.
In formule: data una grandezza vettoriale (Ax, Ay, Az), se Axa1 +Aya2 +Aza3 = s quantità scalare,
allora (a1, a2, a3) è una grandezza vettoriale.
Premesso questo si può ragionare come segue. Noi sappiamo che la differenza di temperatura tra
due punti vicini dello spazio è, ovviamente, una quantità scalare. Tale differenza si può scrivere come:
T ∼= dTdx ·x+ dT
dy ·y + dTdz ·z dove x , y e z sono le tre componenti del vettore di posizione
r del secondo punto rispetto al primo.
Da questo segue che
dTdx ,
dTdy ,
dTdz
è una grandezza vettoriale.
Questa grandezza è indicata con il simbolo ∇T ( Gradiente di T ). Si definisce quindi
∇T =
dT
dx,dT
dy,dT
dz
e la differenza di temperatura tra due punti vicini si può scrivere come : T ∼= ∇T · ∇r. In parole:
la differenza di temperatura tra due punti molto vicini è data, in prima approssimazione, dal prodotto
scalare tra il gradiente della temperatura ed il vettore che porta dal primo al secondo punto dello spazio.

CAPITOLO 2. UN PÒ DI MATEMATICA 28
Si noti come nella precedente relazione è indicato come vettore non tutto il ∇T ma solo il simbolo
"∇" che prende il nome di nabla. Questo avviene in quanto la temperatura T potrebbe essere sostituita
da qualsiasi altro campo scalare, senza che con questo il ragionamento fatto cessi di essere valido. Ciò
significa la proprietà vettoriale è caratteristica dell’operatore di derivazione e non della funzione su cui
esso opera.
Si definisce quindi l’operatore vettoriale:
∇ =
d
dx,d
dy,d
dz
. Va tuttavia notato come ∇ da solo non significhi nulla; esso deve essere infatti sempre seguito da qualche
cosa: la funzione da derivare.
Due questioni che lasciamo allo studente:
• Un vettore può essere moltiplicato per uno scalare e vale ovviamente che A · s = s · A. La stessa
cosa non vale nel caso di ∇ . Si ha infatti che ∇ · s = s · ∇. Quale è il motivo?
• Si era visto che la dTdx , da sola, non può comparire in una legge fisica. Lo stesso ragionamento fatto
varrà pure per la derivata dTdt della temperatura rispetto al tempo?
Definito l’operatore differenziale nabla possiamo chiederci cosa si ottenga facendo i prodotti scalare e
vettoriale tra detto operatore ed una comune grandezza vettoriale. In entrambi i casi l’operatore può
trovarsi sia a destra che a sinistra della grandezza vettoriale. Si ottengono quindi le quattro sottoindicate
situazioni.
• Prodotto scalare tra ∇ ed una generica grandezza vettoriale A
1. A · ∇ = Axddx + . . . resta un operatore
2. ∇ · A = dAxdx + . . . è uno scalare. Prende il nome di divergenza di A
• Prodotto vettoriale tra ∇ ed una generica grandezza vettoriale A
1. A× ∇ resta un operatore
2. ∇× A è un vettore, che prende il nome di rotore di A, le cui componenti sono:∇× A
z=
dAy
dx − dAxdy ed analoghe
Riassumendo, è importante ricordare che l’operatore differenziale ∇ può essere applicato o ad uno sca-
lare ottenendo con ciò una grandezza vettoriale (Gradiente), oppure può essere applicato ad un vettore
attraverso le due operazioni di prodotto scalare (Divergenza) o prodotto vettoriale (Rotore), dando luogo
rispettivamente ad uno scalare o ad una nuova grandezza vettoriale.
Questi operatori sono importanti in quanto le equazioni fondamentali dell’elettromagnetismo (Equazioni
di Maxwell) possono essere espresse pure tramite relazioni per i Rotori e le Divergenze dei campi E ed
B.

CAPITOLO 2. UN PÒ DI MATEMATICA 29
∇ · B = ρε0
∇ · B = 0
∇× E = −d Bdt
c2∇× B =Jε0
+ dEdt
Dopo aver parlato delle derivate prime dei campi, consideriamone adesso le derivate seconde.
Come possiamo combinare gli operatori di derivazione?
Elenchiamo qui sotto le varie possibilità.
• Partendo da uno scalare, la prima derivata sarà necessariamente un gradiente, per cui avremo solo
due possibilità:
1. ∇ ·∇T
prodotto scalare [Divergenza di un Gradiente ]
2. ∇×∇T
prodotto vettoriale [ Rotore di un Gradiente]
• Se invece si parte da un campo vettoriale avremo:
1. ∇∇ · A
gradiente [Gradiente di una Divergenza]
2. ∇ ·∇× A
prodotto scalare [Divergenza di un Rotore]
3. ∇×∇× A
prodotto vettoriale [Rotore di un Rotore]
Alcune proprietà delle derivate seconde
Le espressioni per il Rotore di un Gradiente e per la Divergenza di un Rotore forniscono sempre
risultato nullo; indipendentemente dalla grandezza su cui operano.
Se ∇ fosse un comune vettore, quanto detto sarebbe cosa evidente, ma, poiché è un operatore
l’affermazione va perlomeno verificata in quanto potrebbero esservi sorprese.
Ad esempio nel caso del Rotore di un Gradiente potremmo verificare se ∇ ×∇T
= 0 per una
generica funzione scalare T = T (x, y, z).
Considerando, ad esempio, la componente z si scrive∇×
∇T
z= d
dx
∇T
y− d
dy
∇T
x=
ddx
dTdy − d
dydTdx . Si vede subito che, per quanto detto sulla invertibilità nell’ordine in cui si possono
effettuare le derivazioni, il valore dell’espressione sarà sempre nullo. Identici risultati si ottiengono per le
altre due componenti, per cui è in generale vero che ∇×∇T
= 0 .
Nota: Si deve tuttavia osservare ad esempio che∇ϕ
×∇ψ
= 0. Perché questo?
Ha lo studente una qualche idea in merito?
Come vedete, il considerare ∇ come un vettore può a volte condurre a risultati erronei.
In modo analogo si può verificare che anche la Divergenza di un Rotore è sempre nulla.
Si è quindi trovato che:
1. Il rotore di un gradiente è nullo :
∇×∇T
= 0 (2.5)

CAPITOLO 2. UN PÒ DI MATEMATICA 30
2. La divergenza di un rotore è nulla :
∇ ·∇× A
= 0 (2.6)
Ci si può domandare se valgano pure le proprietà inverse.
Se ad esempio un campo vettoriale A è tale che ∇× A = 0, potremmo chiederci se A sia il gradiente
di un qualche campo scalare.
In effetti esiste un teorema che afferma proprio questo.
Se ∇× A = 0 , allora esiste un campo scalare ϕ tale che A = ∇ϕ .
Analogamente se ∇ · A = 0 allora esiste un campo vettoriale C tale che A = ∇× C.
Chiaramente le soluzioni per ϕ e C non sono univoche. Basti pensare che, avendo a che fare con
operatori differenziali, una qualunque costante additiva non lascia traccia di se. Vi è di più: se D è un
campo irrotazionale (∇× D = 0 ) allora i campi C e C + D danno luogo allo stesso campo vettoriale A .
In formule: A = ∇× C = ∇×C + D
.
Questo campo D come possiamo ottenerlo?
È molto semplice: basta prendere il gradiente di una qualunque funzione scalare. Si capisce quindi
come le possibilità di scelta siano veramente numerose!
Veniamo adesso alle altre derivate seconde, iniziando dalla divergenza di un gradiente : ∇ ·∇T
Esplicitando il gradiente, si trova facilmente che il risultato è una quantità scalare: ∇ ·∇T
=
d2
dx2T + d2
dy2T + d2
dz2T
Questo permette di introdurre l’operatore scalare “nabla quadro” ∇2 che associa ad una funzione
scalare la somma delle sue tre derivate deconde rispetto alle coordinate.
Sinteticamente:
∇2 =
d2
dx2+
d2
dy2+
d2
dz2
Esso prende anche il nome di Laplaciano.
Essendo ∇2 un operatore scalare, le funzioni a cui può essere applicato possono essere pure le tre
componenti di un qualunque campo vettoriale A. Pertanto possiamo applicare ∇2 anche a campi vettoriali
secondo la regola: ∇2 A =∇2Ax, ∇2Ay, ∇2Az
Veniamo poi al rotore di un rotore: ∇×∇× A
Eseguendo le indicate operazioni otterremo un campo vettoriale.
Si ricava facilmente con alcuni calcoli che
∇×∇× A
= ∇ ·
∇ · A
−∇2 A (2.7)

CAPITOLO 2. UN PÒ DI MATEMATICA 31
Ci si può facilmente ricordare tale espressione utilizzando come pro-memoria la scomposizione del
doppio prodotto vettoriale tra vettori ed osservando che A∇ · ∇
non ha senso e che quindi va scritta
come∇ · ∇
A = ∇2 A
Resta infine il gradiente di una divergenza: ∇∇ · A
.
Su di esso non vi è nulla di particolare da dire.
Gradiente di un vettore
L’operatore gradiente può essere applicato pure ad una grandezza vettoriale.
Scriviamo per questo la differenza tra i valori assunti da una grandezza vettoriale A = (Ax, Ay, Az)
in due punti tra loro prossimi.
Avremo
∆A = (∆Ax, ∆Ay, ∆Az) =δ · ∇Ax, δ · ∇Ay, δ · ∇Az
con δ vettore che porta dal primo al secondo punto.
Si ha quindi che la grandezza cercata è esprimibile tramite in prodotto righe per colonne:
∆A = (δx, δy, δz) ·
ddxAx
ddxAy
ddxAz
ddyAx
ddyAy
ddyAz
ddzAx
ddzAy
ddzAz
(2.8)
In termini compatti si scrive ∆A = δ ·∇ A
ove
∇ A =
ddxAx
ddxAy
ddxAz
ddyAx
ddyAy
ddyAz
ddzAx
ddzAy
ddzAz
(2.9)
prende il nome di Gradiente del Campo Vettoriale A.
Un caso molto importante riguarda il Gradiente di Campo Elettrico ( E.F.G.) attraverso il quale, ad
esempio, i nuclei atomici risentono degli stati atomici e della struttura dei legami chimici. Per questo
riveste importanza la valutazione sperimentale dell’EFG visto dai nuclei.
Parliamo adesso di tre teoremi che saranno molto utili nello studio dell’elettromagneti-
smo.
1) Se abbiamo un campo scalare ψ, la differenza tra i valori di ψ relativi a due punti qualunque β ed
α dello spazio è data da:
ψ (β)− ψ (α) =
ˆΓ
∇ψ
· dl (2.10)
dove Γ è una qualunque linea che unisca α con β. La quantità´Γf · dl prende il nome di integrale di linea
di f lungo Γ.

CAPITOLO 2. UN PÒ DI MATEMATICA 32
Figura 2.7: Mappa dei sentieri di Montese. Dal si-to web della Comunità montana Appennino ModenaEst : http://www.turismo.montana-est.mo.it/
Nell’esempio di figura 2.7, tratto dal sito del-
la Comunità montana Appennino Modena Est
http://www.turismo.montana-est.mo.it/ , la fun-
zione ψ è la quota di ciascun punto della mappa
e la linea Γ corrisponde al tracciato di un dato
sentiero.
2) Teorema di Gauss
Sia S una qualunque superficie chiusa e V il
volume interno ad essa. Detta n la normale esterna
a detta superficie, vale:
ˆS
A · nds =
ˆV
∇ · A
dv (2.11)
dove A è un qualunque campo vettoriale.
In parole si afferma che il flusso uscente di A
attraverso la superficie chiusa S è uguale all’inte-
grale della divergenza di A sul volume interno ad
S. L’egualianza vale se, come di convenzione, la normale n è la normale esterna.
3) Teorema di Stokes
Data una qualunque linea chiusa Γ ed una qualunque superficie S avente tale linea per contorno vale,
per un qualunque campo vettoriale A:
˛Γ
A · dl =ˆS
∇× A
· nds (2.12)
n
!
Figura 2.8: Regola della mano destra
Perché valga la relazione sopra scritta occorre chia-
ramente che la scelta del senso di percorrenza su
Γ sia correlata con la direzione della normale n ad
S come indicato dalla figura 2.8. Tale correlazio-
ne prende in genere il nome di regola della mano
destra in quanto, chiudendo la mano a pugno ed al-
zando il pollice, la direzione di quest’ultimo indica
il senso della normale, mentre le altre quattro dita indicano il senso di percorrenza sulla linea Γ.
Iniziamo le dimostrazioni partendo dal primo teorema e ricordando quanto detto a riguardo degli
integrali di linea.
Facendo riferimento alla figura 2.7, consideriamo ad esempio uno qualsiasi dei sentieri che connettono
il paese alla sommità del monte. Esso definirà la linea Γ che dovrà essere percorsa, passo dopo passo.
Indichiamo con ψ (β) − ψ (α) il dislivello esistente tra la cima del monte ed il paese. Esso sarà dato

CAPITOLO 2. UN PÒ DI MATEMATICA 33
dalla somma di tutti i dislivelli ψi, a volte positivi ed a volte negativi, corrispondenti ai vari passi che
dovremo fare durante il tragitto. Avremo ψ (β) − ψ (α) =
i ψi ed è evidente che il risultato della
somma non potrà dipendere dal sentiero scelto; in termini matematici dalla linea Γ.
Come potremo esprimere il contributo ψi connesso al singolo passo?
Tenendo conto della equazione 2.4 avremo ψi dψ
dx
ri
dx+
dψ
dx
ri
dy+
dψ
dz
ri
dz =
∇ψ
i· i
ove i rappresenta il generico passo. Si ha quindi che ψ (β)− ψ (α) =
i
ψi∼=
i
∇ψ
i· i e,
passando al limite, ψ (β)− ψ (α) =
ˆΓ
∇ψ · dl indipendentemente dalla particolare linea Γ connettente i
due punti α e β.
S
!1
!2 sS
Si
Figura 2.9: Superficie chiusa S intersecata da duesuperfici piane
Veniamo adesso al secondo teorema.
Consideriamo il flusso di un campo vetto-
riale attraverso una superficie chiusa generica:
ΦS
A=
ˆS
A · nds.
Nel caso che A descriva il fluire nello spazio di
una qualche grandezza fisica ( particelle, calore,
energia od altro ancora) è chiaro che il valore del-
l’integrale di superficie debba essere numericamen-
te uguale al valore dell’ integrale di una opportuna
funzione scalare effettuato sul volume interno ad S.
Ad esempio nel caso che A descriva il fluire di particelle, ΦS
A
dovrà eguagliare la diminuzione
del numero delle stesse per unità di tempo all’interno del volume definito da S per cui dovrà valere :
ΦS
A= −
ˆV
dρ
dtdv ove ρ è la densità spaziale di particelle.
Una “matematica” che non contenesse al suo interno il teorema di Gauss non sarebbe utile nella
descrizione di ciò che vediamo accadere nella realtà, come, ad esempio, quando a tavola ci riempiamo il
bicchiere dal contenuto di una bottiglia.
Procediamo adesso alla dimostrazione.
Se dividiamo il volume contenuto all’interno di S in due parti attraverso, ad esempio, la superficie
π1 di figura 2.9 si vengono ad ottenere tre superfici chiuse: S , Si ed Ss . Potremmo domandarci se
esista una relazione che leghi i flussi uscenti dalle suddette superfici. Tale relazione esiste ed è la seguente
ΦS
A= ΦSi
A+ ΦSs
A
Lasciamo allo studente il compito di capire come mai debba valere la relazione appena scritta.
Procedendo ancora nel suddividere, in modo analogo, il volume con altre superfici, come la π2, si
arriva a scrivere, con ovvio significato dei simboli: ΦS
A=
i
ΦSi
A.
Supponiamo di suddividere la superficie “S” tramite famiglie di piani tra loro ortogonali equidistanti
come mostrato in figura 2.10. In questo caso la singola superficie infinitesima dsi avrà la forma di un

CAPITOLO 2. UN PÒ DI MATEMATICA 34
!
x
y
z
A(r)
A(r+!)
Figura 2.10: Famiglia di piani equidistanti, mutuamente ortogonali, definenti un insieme di superficicubiche. Sono mostrate, in verde, le normali a superfici opposte di un dato cuvetto ed in rosso il camposu di esse.
piccolo cubo. Detto δ il suo lato, si può pervenire alla espressione per il flusso uscente dal cubetto
dΦdsi
A. Il flusso uscente sarà infatti dato dalla somma dei flussi attraverso le sei facce.
Consideriamo il contributo di due facce opposte, ad esempio quelle con normale parallela all’asse delle
“x”. Se A assumesse su entrambe identico valore, è chiaro che il contributo della coppia sarebbe nullo a
causa delle opposte direzioni delle normali alle facce. Se A dipende dalla posizione, detto contributo sarà
dato da Axδ2 =dAxdx · δ
δ2 =
dAxdx
δ3. Ripetendo il ragionamento per le altre due coppie di facce
e sommando i contributi si trova quindi: dΦdsi
A=
∇ · A
δ3 ove la divergenza di A è calcolata al
centro del cubetto. Sostituendo questa espressione nella sommatoria e passando al limite il teorema resta
dimostrato.
In modo analogo si dimostra il teorema di Stokes
Basta per questo fare riferimento alla figura 2.11.
a
b!
a
b!
Figura 2.11: Famiglia di linee connettenti punti dilinea chiusa definenti le maglie di una rete aventeper contorno la linea chiusa
Se prendiamo due punti “a” e “b” di una linea
chiusa Γ e li connettiamo tra loro con una linea,
otteniamo altri due circuiti chiusi e possiamo de-
finire due circolazioni la cui somma è uguale alla
circolazione sul circuito originario. Ripetendo an-
cora infinite volte il procedimento otteniamo una
rete a maglie molto piccole che ha come contorno la
linea chiusa originaria. Un ragionamento simile a
quello utilizzato per la dimostrazione del preceden-
te teorema ci porta immediatamente al risultato:¸ΓA · dl =
´S
∇× A
· nds.
Una considerazione:
Supponiamo che ∇ × A sia ovunque nullo; allora¸
A · dl = 0 qualunque sia la linea chiusa Γ su cui
è valutato l’integrale. Da ciò si deduce che´ βα
A · dl è indipendente dal cammino ma dipende solo dai

CAPITOLO 2. UN PÒ DI MATEMATICA 35
punti di partenza e di arrivo α e β. Questo permette di introdurre un campo scalare che prende il nome
di potenziale e che spesso troveremo indicato nel seguito con la lettera ϕ.
!
"
#
$!#
$!"
$"#
Figura 2.12: Tre line formanti un percorso chiuso
Facendo riferimento alla figura 2.12 e ponen-
do´ βα
A · dl = ϕ (α,β) si ha:¸
A · dl =
ϕ (α,β) + ϕ (β, γ) + ϕ (γ,α) = 0 od anche
ϕ (α,β)− ϕ (γ,β) + ϕ (γ,α) = 0.
Per cuiˆ β
α
A · dl = ϕ (α,β) = ϕ (γ,β)− ϕ (γ,α).
Varrà inoltre, per il primo dei tre teoremi
mostrati ( equazione 2.10), che
A = ∇ϕ
.
Uso della simmetria in Fisica
Come vedremo, faremo uso in vari punti del corso di considerazioni riguardanti le proprietà di sim-
metria del particolare sistema fisico in esame. È quindi necessario descrivere brevemente la logica fisica
che è alla base di tali considerazioni.
Per quale motivo ci interessano le proprietà di simmetria?
La risposta stà in cosa ci dice l’esperienza.
Infatti: cosa ci dice questa di fronte ad un dado che, lanciato sul tavolo, si fermi sempre sulla medesima
faccia?
Dall’esterno potrà pure apparire perfetto ma certamente nasconde qualche cosa al suo interno. È un
dado truccato ed, aprendolo, troveremo qualche cosa di strano.1
Per questo, dal punto di vista fisico, assumiamo che tutte le proprietà, sia dei corpi che dello spazio
che li circonda, riflettano le proprietà di simmetria del complesso di oggetti materiali che forma il sistema.
Definiamo adesso con “operazione di simmetria” una qualunque azione, eseguita sulla componente
materiale di un sistema fisico nella sua interezza, che lo porti in una configurazione finale indistinguibile1Alcuni metodi per truccare dadi si basano sul fatto che, appesantendo una faccia, l’oggetto, rotolando, andrà a posarsi
più facilmente su di essa.Ad esempio, avendo un dado di legno, si può, con un trapano da modellismo, praticare buchi sulla superficie che si voglia
appesantire. I buchi non devono essere più profondi di un terzo la lunghezza del dado e vanno riempiti con piombo fusoottenuto tramite un saldatore. Con una lima si tolgono quindi le imperfezioni e si rivernicia il tutto.
Una buona idea può essere quella di non riempire totalmente il buco con il piombo, ma di colmarlo con una resina o collaspeciale. In questo modo la susseguente verniciatura risulta più omogenea, nascondendo meglio il trucco.
Purtroppo un dado così modificato ha il "difetto" di dare quasi sempre lo stesso valore, e questo può indurre sospetti.Occorre quindi che gli effetti del trucco siano facilmente modificabili dall’esterno al momento dell’uso.
Un simpatico trucco consiste nel creare, con il solito trapano, delle colonnine cave, che vadano da una faccia a quellaopposta; ad esempio dalla 1 alla 6. In tali colonnine si introdurrà, per circa un terzo della loro altezza, del mercurio inveceche del piombo. Quindi si tapperà e si vernicerà.
Funzionamento del dado truccato: battendo col dito sulla faccia 6 il mercurio scorrerà nelle cavità del dado e si poseràsulla faccia opposta, andandola ad appesantire. Il risultato del lancio sarà quindi con alta probabilità un 6. Battendo coldito sulla faccia numero 1 si appesantirà la faccia opposta ed i lanci daranno probabilmente un 1.
Tale trucco è quasi impossibile da scoprire perché, anche scuotendo il dado, il mercurio non farà alcun rumore sospetto.Attenzione quindi a chi batte sulle facce dei dadi per “propiziarsi” la fortuna!
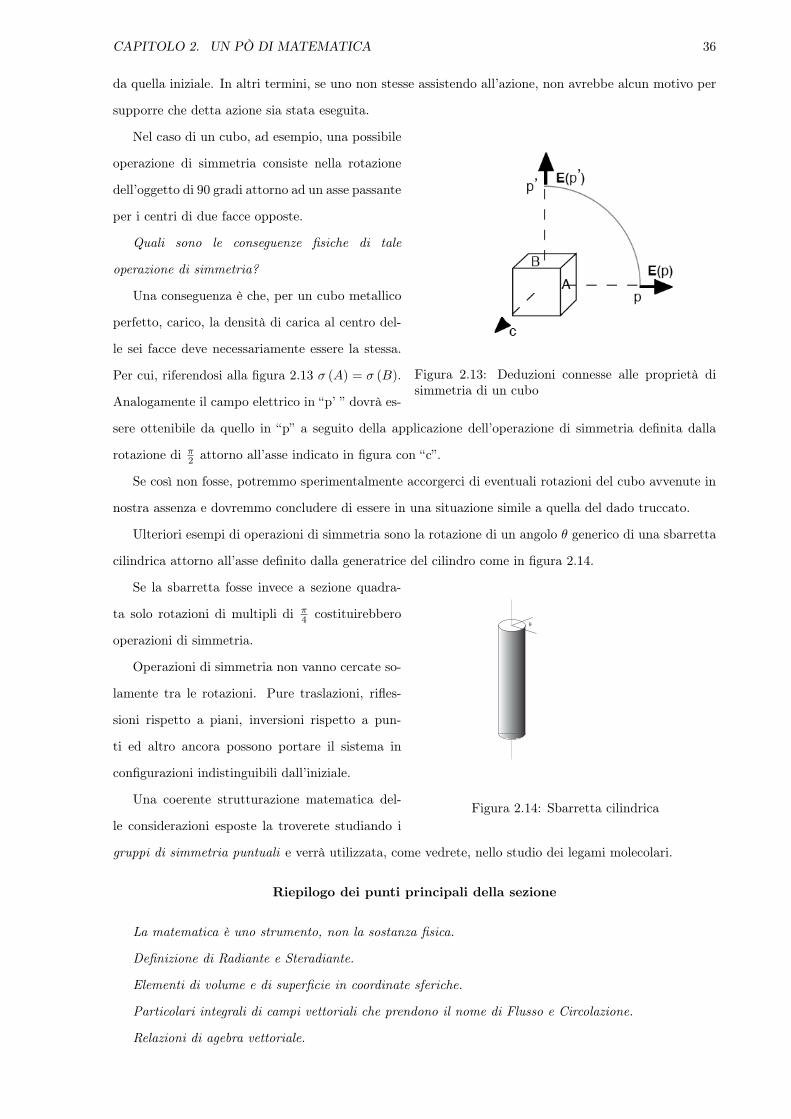
CAPITOLO 2. UN PÒ DI MATEMATICA 36
da quella iniziale. In altri termini, se uno non stesse assistendo all’azione, non avrebbe alcun motivo per
supporre che detta azione sia stata eseguita.
Figura 2.13: Deduzioni connesse alle proprietà disimmetria di un cubo
Nel caso di un cubo, ad esempio, una possibile
operazione di simmetria consiste nella rotazione
dell’oggetto di 90 gradi attorno ad un asse passante
per i centri di due facce opposte.
Quali sono le conseguenze fisiche di tale
operazione di simmetria?
Una conseguenza è che, per un cubo metallico
perfetto, carico, la densità di carica al centro del-
le sei facce deve necessariamente essere la stessa.
Per cui, riferendosi alla figura 2.13 σ (A) = σ (B).
Analogamente il campo elettrico in “p’ ” dovrà es-
sere ottenibile da quello in “p” a seguito della applicazione dell’operazione di simmetria definita dalla
rotazione di π2 attorno all’asse indicato in figura con “c”.
Se così non fosse, potremmo sperimentalmente accorgerci di eventuali rotazioni del cubo avvenute in
nostra assenza e dovremmo concludere di essere in una situazione simile a quella del dado truccato.
Ulteriori esempi di operazioni di simmetria sono la rotazione di un angolo θ generico di una sbarretta
cilindrica attorno all’asse definito dalla generatrice del cilindro come in figura 2.14.
Figura 2.14: Sbarretta cilindrica
Se la sbarretta fosse invece a sezione quadra-
ta solo rotazioni di multipli di π4 costituirebbero
operazioni di simmetria.
Operazioni di simmetria non vanno cercate so-
lamente tra le rotazioni. Pure traslazioni, rifles-
sioni rispetto a piani, inversioni rispetto a pun-
ti ed altro ancora possono portare il sistema in
configurazioni indistinguibili dall’iniziale.
Una coerente strutturazione matematica del-
le considerazioni esposte la troverete studiando i
gruppi di simmetria puntuali e verrà utilizzata, come vedrete, nello studio dei legami molecolari.
Riepilogo dei punti principali della sezione
La matematica è uno strumento, non la sostanza fisica.
Definizione di Radiante e Steradiante.
Elementi di volume e di superficie in coordinate sferiche.
Particolari integrali di campi vettoriali che prendono il nome di Flusso e Circolazione.
Relazioni di agebra vettoriale.

CAPITOLO 2. UN PÒ DI MATEMATICA 37
Concetto di operatore, ed, in particolare, gli operatori differenziali Gradiente, Divergenza, Rotore e
Laplaciano.
Teorema di Gauus, Stokes ed espressione tramite integrale di linea della differenza tra i valori che un
campo scalare assume in due punti.
Uso delle considerazioni di simmetria all’interno di un problema fisico.