Embed Size (px)
Citation preview

1/14
FICHE F3 – CONTROLER DES MOTEURS ET DIRIGER
UN ROBOT
SOMMAIRE 1.Contrôler des moteurs CC simples ....................................................................................................... 3
2. Le pont en H ........................................................................................................................................ 3
2.1. Le circuit SN754410 de Texas Instrument ................................................................................ 3
2.2. Le câblage du circuit ................................................................................................................. 4
2.3. Le code Arduino ........................................................................................................................ 5
3. La modulation de largeur du signal (PWM ou Pulse Width Modulation). .......................................... 5
3.1. Principe de la commande PWM ............................................................................................... 6
3.2. Application................................................................................................................................ 7
4.Diriger un robot avec un joystick ......................................................................................................... 8
4.1. Anatomie d’un joystick ............................................................................................................. 8
4.2. Premiers essais ......................................................................................................................... 9
4.3. Calibrage du joystick ............................................................................................................... 10
Samedis bénévoles spécial Arduino
Workshop n°1

2/14
4.4. Un joystick et 8 directions ...................................................................................................... 10
4.5. Le programme de l’Arduino ................................................................................................... 11

3/14
1.Contrôler des moteurs CC simples
Cette séquence se limite au contrôle des moteurs à courants continus les plus ordinaires et ne traite
pas des moteurs pas à pas ni des moteurs brushless.
Deux techniques sont utiles :
- La commande du sens de rotation par un pont en H ;
- La commande la puissance (et donc de la vitesse) par la modulation d’amplitude du signal
(PWM ou Pulse Width Modulation).
2. Le pont en H
Le nom de ce circuit vient de sa forme :
Selon l’ouverture et la fermeture des
interrupteurs, le circuit alimente ou pas le
moteur. La fermeture de S1 et S4, exclusivement
de S2 et S3 fait tourner le moteur dans un sens
et réciproquement si on ferme S2 et S3 en
ouvrant S1 et S4. Ouvrir S1 et S2 ou S3 et S4
arrête le moteur.
Comme tout dispositif composé de bobinages, les effets de self à l’ouverture ou à la fermeture d’un
circuit produisent des pointes de courant dommages pour l’électronique et pour le moteur. Ces
courants peuvent neutralisés par des diodes. Les autres courants transitoires sont atténués par des
condensateurs de filtrages. Ainsi, le dispositif « mécanique » est remplace par un circuit de
commande électronique.
Le pont en H peut être implémenté par des relais des transistors ou un circuit intégré dédiée. Dans le
cadre de cette séquence, le circuit SN754410 de Texas Instrument et qui contient deux ponts en H
sera utilisé mais il existe d’autres références, comme le LN293 ou le LN298.
2.1. Le circuit SN754410 de Texas Instrument
Très peu coûteux (moins de 3 euros), ce circuit mobilise 2 PINs de l’Arduino par moteur qui peuvent
consommer chacun jusqu’à 1 ampère. Les circuits dédiés au contrôle des moteurs (motor shields)
sont plus performants et plus pratiques à utiliser mais nettement plus chers. A noter que ce circuit
permet aussi de commander des moteurs pas à pas.
La documentation complète officielle du circuit (datasheet) est disponible ici :
http://www.ti.com/lit/ds/symlink/sn754410.pdf

4/14
La reconnaissance de son brochage est essentielle mais notez qu’il n’est pas si compliqué dans la
mesure où chaque rangée est symétrique et correspond à un pont en H, pour le contrôle d’un
moteur.
Pour aller plus vite, nous donnons le câblage et le code de l’Arduino correspondant.
2.2. Le câblage du circuit
Dans tout montage de puissance (même à 2A sous 5V, il y a quand même 10W maxi), nous vous
conseillons de bien séparer le circuit basse tension, celui de l’Arduino, et le circuit de puissance, celui
des moteurs. Cela est vrai avec n’importe quel équipement et le circuit de l’Arduino doit être
découplé si nécessaire avec des condensateurs et des résistances pour éviter tout retour de courant
ou parasite.
(Comme pour tout circuit le chanfrein ou l’encoche désigne le haut). Les pattes à utiliser sont
- 4, 5, 12 et 13 sont à relier à la masse (GND)
- 3 et 5 sont à relier au moteur 1
- 11 et 14 au moteur 2
- L’alimentation de ces deux moteurs viendra de la patte 8 et de
la masse (GND). Les masses doivent être reliées
- La patte 16 sera reliée au +5V de l’Arduino
- 2, 7, 10 et 15 aux pattes de l’Arduino pour la commande des
moteurs
Un petit schéma de principe au brouillon est toujours utile :
Arduino Pont en H
SN75441
M1
1
+5V
+9V
8
3
5
16
2
7
1A est la patte en
entrée qui contrôle
la patte 1Y en
sortie qui est reliée
à la borne + d’un
moteur. 2A
commande la patte
2Y reliée à la borne
– du même moteur
Même principe
pour le second
moteur avec 3A et
3Y et 4A et 4Y
5/14
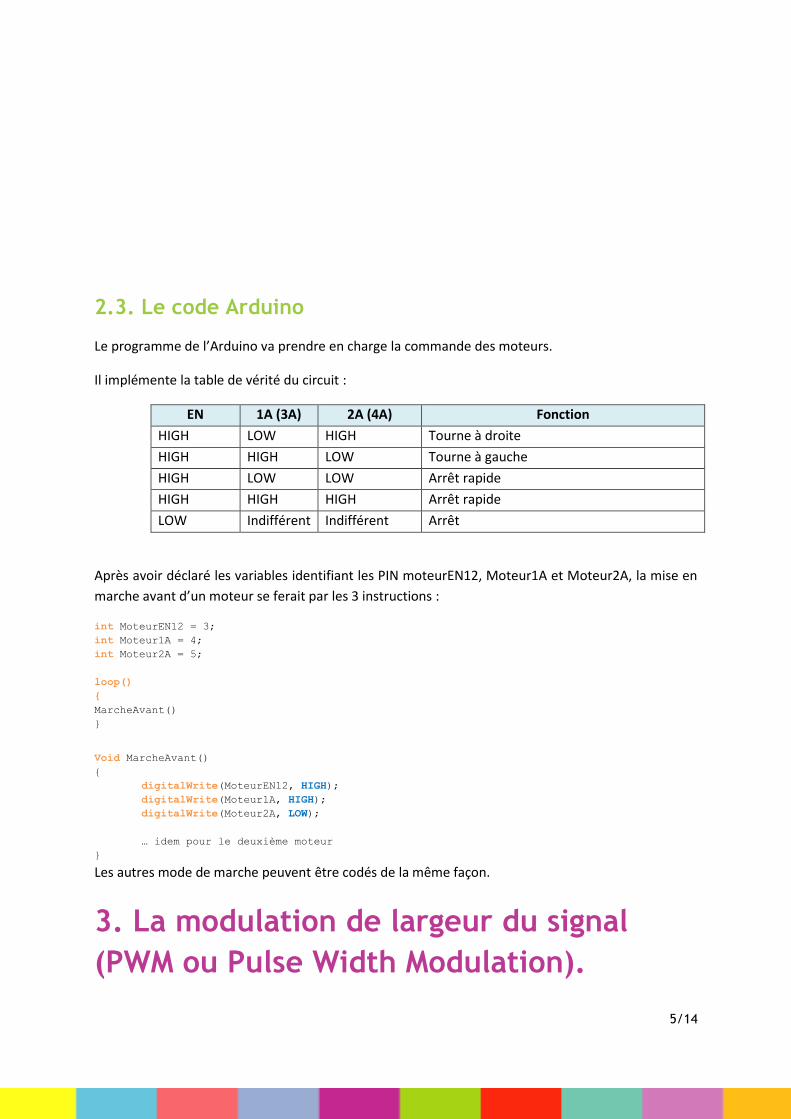
2.3. Le code Arduino
Le programme de l’Arduino va prendre en charge la commande des moteurs.
Il implémente la table de vérité du circuit :
EN 1A (3A) 2A (4A) Fonction
HIGH LOW HIGH Tourne à droite
HIGH HIGH LOW Tourne à gauche
HIGH LOW LOW Arrêt rapide
HIGH HIGH HIGH Arrêt rapide
LOW Indifférent Indifférent Arrêt
Après avoir déclaré les variables identifiant les PIN moteurEN12, Moteur1A et Moteur2A, la mise en
marche avant d’un moteur se ferait par les 3 instructions :
int MoteurEN12 = 3;
int Moteur1A = 4;
int Moteur2A = 5;
loop()
{ MarcheAvant()
}
Void MarcheAvant()
{
digitalWrite(MoteurEN12, HIGH);
digitalWrite(Moteur1A, HIGH);
digitalWrite(Moteur2A, LOW);
… idem pour le deuxième moteur
}
Les autres mode de marche peuvent être codés de la même façon.
3. La modulation de largeur du signal
(PWM ou Pulse Width Modulation).

6/14
La commande de vitesse est réalisée en envoyant une valeur comprise entre 0 et 255 sur les pates EN
du circuit (pattes1 pour le moteur 1 et 9 pour le moteur 2). Auparavant, il est utile de comprendre le
principe d’une commande PWM.
3.1. Principe de la commande PWM
La tension de sortie correspondant à la hauteur du signal, l’idée est de n’émettre ce signal que
pendant une fraction plus ou moins importante d’un cycle. On utilise pour ce faire une variable qui
contiendra la valeur du temps d’émission. Contrairement aux deux commandes précédentes pour le
pont en H, cette valeur sera transmise par la fonction
analogWrite(PIN, Valeur);
La variation de la largeur de l’impulsion va entraîner une diminution de la valeur moyenne de la
tension (Tension de sortie = durée ON/durée OFF) x Tension maxi) :

7/14
Et la précision de la commande va dépendre de la capacité d’échantillonage du signal par le
processeur1 :
Avec un Arduino UNO ou NANO, l’échantillonnage se fait sur 8 bits donc la valeur de puissance peut
varier entre 0 et 255.
Dans notre montage, le signal est émis par les PIN de l’Arduino qui permettent d’utiliser le PWM (3,
5, 6, 9, 10 et 11 sur les Arduino à base de processeurs AtMega328).
3.2. Application
Un exemple très connu2 est la variation d’intensité lumineuse d’un groupe de LED de différentes
couleurs pour créer une ambiance (voir la référence)
Mais la commande par PWM est très utilisée pour la variation de vitesse des moteurs. En robotique
de loisir, elle permet d’avoir un déplacement à plusieurs vitesses. Par exemple, un déplacement à
100% de la vitesse pour aller d’un bout à l’autre du plateau de jeu et une vitesse réduite pour
l’approche d’une action de jeu.
Avec le circuit SN75441, deux possibilités sont offertes pour le PWM:
- Utiliser les broches EN12 et EN34 pour envoyer un signal PWM avec la valeur correspondant
à la vitesse souhaitée ;
- Envoyer un signal PWM à la place du signal HIGH sur les pattes de commandes 1, 2, 3 ou 4A.
1 http://todbot.com/blog/wp-content/uploads/2006/10/arduino_spooky_projects_class2.pdf
2 http://todbot.com/blog/spookyarduino/

8/14
Cette dernière solution est la plus efficace tandis que la première est plus simple. En dessous de 50%
de puissance cependant, le moteur ne tourne plus.
Avec une variable nommée Vitesse qui donnerait la valeur du PWM, le code serait le suivant
1ère solution 2ème Solution int MoteurEN12 = 3;
int Moteur1A = 4;
int Moteur2A = 5;
int Vitesse = 200;
loop()
{ MarcheAvant()
}
Void MarcheAvant()
{
analoglWrite(MoteurEN12, Vitesse);
digitalWrite(Moteur1A, HIGH);
digitalWrite(Moteur2A, LOW);
… idem pour le deuxième moteur
}
int MoteurEN12 = 3;
int Moteur1A = 4;
int Moteur2A = 5;
int Vitesse = 200;
loop()
{ MarcheAvant()
}
Void MarcheAvant()
{
digitalWrite(MoteurEN12, HIGH);
analogWrite(Moteur1A, Vitesse);
digitalWrite(Moteur2A, LOW);
… idem pour le deuxième moteur
}
4.Diriger un robot avec un joystick
Un joystick du même type que ceux que l’on retrouve sur les consoles de jeux est idéal pour diriger
un robot. Une autre possibilité est dans l’utilisation de deux potentiomètres ou de deux
interrupteurs, un pour chaque moteur, mais un joystick permet de diriger le robot avec une seule
main (et même un seul pouce) et de laisser l’autre libre pour commander des actionneurs.
4.1. Anatomie d’un joystick
Bien que très bon
marché (environ
3€), ce joystick a un
fonctionnement
très correct. Il est
composé de deux
potentiomètres
disposés à angle
droit et d’un
bouton poussoir
Il se câble simplement en reliant les bornes
VCC: à l’alimentation positive (5V ou 3.3V)
VERT: à un PIN d’entrée analogique de l’Arduino où il indiquera la tension sur l’axe vertical. Lorsque le joystick est centré, il indique approximativement la moitié de la tension d’entrée. L’Arduino convertit en une valeur comprise entre 0 et 1023
HORIZ: idem pour l’axe horizontal
SEL: pour le bouton poussoir, lors de l’appui, cette sortie est reliée à la masse (GND)
GND: la masse Ce dispositif permet de nombreuses possibilités :

9/14
4.2. Premiers essais
Le programme3 ci-dessous permet de tester son fonctionnement :
// Thumb Joystick example
// Mike Grusin, SparkFun Electronics 3/11
// This code is free, baby. Use it however you like.
.
// Connections de l’Arduino au joystick
const int VERT = 0; // analogique donc A0
const int HORIZ = 1; // analogique donc A1
const int SEL = 2; // digital
// Connecter VCC au +Vcc de l’Arduino, idem pour GND.
void setup()
{
pinMode(SEL,INPUT); // SEL sera lu
digitalWrite(SEL,HIGH); // pull-up
Serial.begin(9600);
}
void loop()
{
int vertical, horizontal, select;
// lecture des valeurs du joystick
vertical = analogRead(VERT); // entre 0 et 1023
horizontal = analogRead(HORIZ); // entre 0 et 1023
select = digitalRead(SEL); // HIGH (1) si non appuye, LOW (0) sinon
// affichage des valeurs
Serial.print("vertical: ");
Serial.print(vertical,DEC);
Serial.print(" horizontal: ");
Serial.print(horizontal,DEC);
Serial.print(" select: ");
if(select == HIGH)
Serial.println("non appuye");
else
Serial.println("APPUYE!");
}
3 https://www.sparkfun.com/tutorials/272
10/14
On remarque que lorsqu’il est au repos, la valeur renvoyée n’est pas exactement égale à 512 (le
milieu de l’intervalle entre 0 et 1023) sur les deux axes, du fait de la tolérance de fabrication. On
constate également qu’un petit appui fait varier les valeurs. Dans ces deux cas, les moteurs se
mettraient en mouvement car une valeur différente du point de repos aurait été mesurée ou parce
qu’un petit mouvement du pouce l’aurait faite varier.
4.3. Calibrage du joystick
Une solution est dans la création d’une zone encadrant le point neutre et parce que chaque
potentiomètre peut avoir une valeur légèrement différente, on utilise des seuils mini et maxi qui
encadrent un intervalle au sein duquel le joystick est réputé être dans sa position neutre
Le calibrage du joystick revient à définir un intervalle sur les X et les Y qui correspond au point neutre
afin d’éviter les actions intempestives. Chaque axe une valeur de seuil mini et maxi
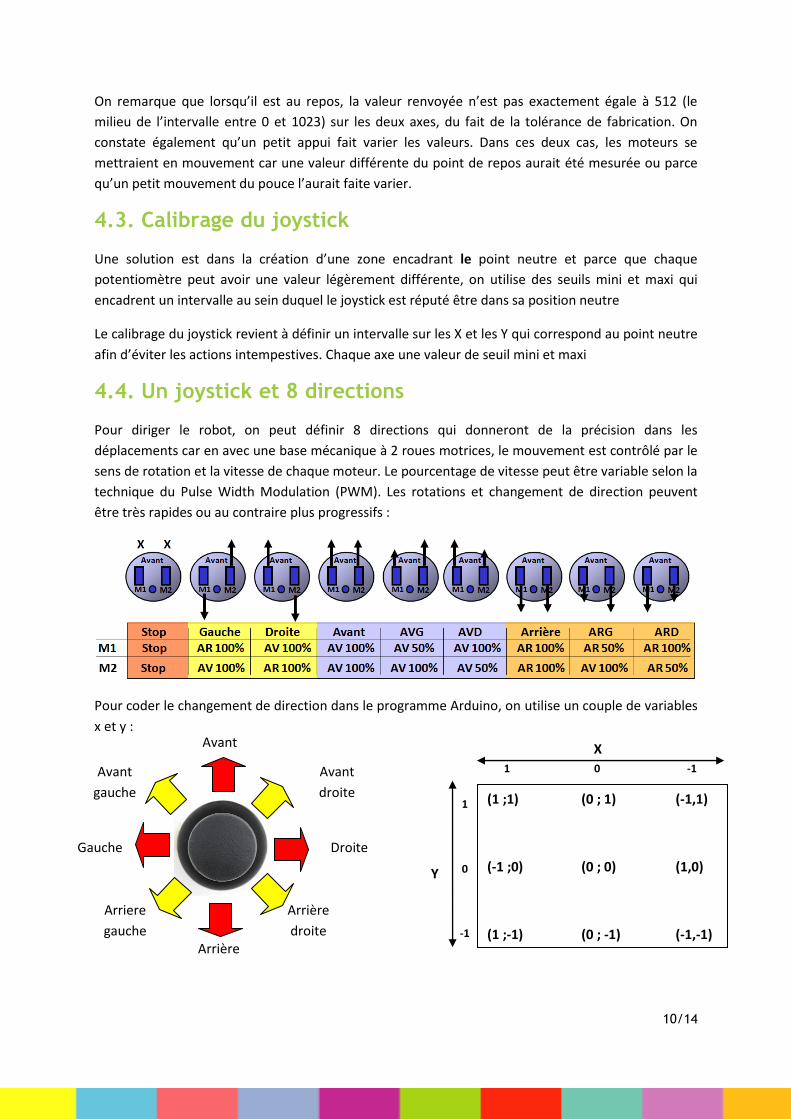
4.4. Un joystick et 8 directions
Pour diriger le robot, on peut définir 8 directions qui donneront de la précision dans les
déplacements car en avec une base mécanique à 2 roues motrices, le mouvement est contrôlé par le
sens de rotation et la vitesse de chaque moteur. Le pourcentage de vitesse peut être variable selon la
technique du Pulse Width Modulation (PWM). Les rotations et changement de direction peuvent
être très rapides ou au contraire plus progressifs :
Pour coder le changement de direction dans le programme Arduino, on utilise un couple de variables
x et y :
Gauche Droite
Avant
Arrière
Arrière
droite
Avant
droite
Avant
gauche
Arriere
gauche
(1 ;1) (0 ; 1) (-1,1)
(-1 ;0) (0 ; 0) (1,0)
(1 ;-1) (0 ; -1) (-1,-1)
X
Y
1 -1 0
-1
1
0

11/14
La position médiane (0, 0) sera contrôlée par les valeurs de seuils utilisées pour le calibrage et à
chaque itération de la boucle loop(), x et y seront remis à 0. C’est le changement de valeur de x et y
causé par un changement de valeur des potentiomètres qui permettra de déclencher le mouvement
ad hoc. Notez bien que sur l’axe X la valeur la plus à gauche est 1023 et la plus à droite 0 !
4.5. Le programme de l’Arduino
4.5.1. Déclaration des PINs, des variables et des constantes
On déclare les deux PINs rattachés aux bornes VERT et HORIZ du joystick :
Puis les variables X et Y qui seront utilisées pour la lecture sur ces PINs :
Des constantes de seuil encadrant le point mort théorique (512) :
et deux variables qui permettront de réduire les valeurs lues sur les deux potentiomètres (de 0 à
1023) à 9 couples de valeurs :
4.5.2. Initialisation : Setup()
Il n’y a rien de particulier pour la gestion du joystick dans le setup !
4.5.3. Boucle principale : Loop()
A chaque cycle, on lit la valeur des deux potentiomètres HORIZ et VERT :
Et on remet à 0 les variables de direction (les moteurs sont arrêtés)
On calcule la valeur de la direction sur X :

12/14
Et sur Y :
On obtient un couple de valeur (x-direction ; y_direction) qui correspond au tableau ci-dessus et qu’i
suffit de tester pour déterminer l’action à réaliser.
On note la fonction ARDroite() qui va commander les moteurs de façon à obtenir un déplacement en
arrière et vers la droite selon le tableau décrit plus haut :
void ARDroite()
{
digitalWrite(M1_SENS_AR, HIGH) ; // controle sens AR
digitalWrite(M1_SENS_AV, LOW; // controle sens AV
digitalWrite(M1_VITESSE, HIGH) ; // vitesse 100%
digitalWrite(M2_SENS_AR, HIGH) ; // controle sens AR
digitalWrite(M2_SENS_AV, LOW) ; // controle sens AV
digitalWrite(M2_VITESSE, 128) ; // vitesse 50%
}
4.5.4. Le test de direction : version complète
Les 9 positions possibles sont gérées par une imbrication de tests conditionnels dans une structure
de type si <condition> alors <bloc1> sinon <bloc2>.
Si x_direction = -1
Alors
Si y_direction = -1
Alors ARDroite() (-1 ; -1)
Sinon
Si y_direction = 0
Alors ADroite() (-1 ;0)
Sinon AVDroite() car y_direction vaut 1 donc (-1 ;1)
FinSI
FinSi
Sinon

13/14
Si x_direction = 0
Alors
- Si y_direction = -1
Alors Marche AR (0, -1)
Sinon
Si y_direction = 0
Alors STOP() (0 ; 0)
Sinon MarcheAV() (0 ; 1)
FinSi
Sinon (x_direction = 1)
Si y_direction = -1
Alors ARGauche() (1, -1)
Sinon
Si y_direction = 0
Alors AGauche() (1 ; 0)
Sinon AVGauche() (1 ;1)
FinSi
FinSi
FinSI
FinSi
FinSi
4.5.5. Le test de direction : version sumplifiée
En ne retenant que 4 directions et en testant les conditions deux par deux pour ne retenir que les
couples du tableau, les tests se simplifient :
Si x_direction = 0 et y_direction = 0 alors STOP()
FinSi
Si x_direction = 0 et y_direction = 1 alors MarcheAV()
FinSi
Si x_direction = 0 et y_direction = -1 alors MarcheAR()
FinSi
Si x_direction = 1 et y_direction = 0 alors ADroite()
FinSi
Si x_direction = -1 et y_direction = -0 alors AGauche()
FinSi

14/14
*
* *





























